В ряде случаев возникает необходимость
найти ток в отдельно взятой ветви
электрической цепи. В этом случае нет
необходимости использовать громоздкие
методы расчетов определения токов во
всех ветвях. В таких случаях следует
использовать метод эквивалентного
генератора (МЭГ). МЭГ хорош еще и тем,
что позволяет определить сопротивление
нагрузки двухполюсника, при котором
выделяется максимальная мощность, что
очень важно при последовательном
включении каскадов, согласованных по
мощности. Иногда этот метод называют
методом холостого хода и короткого
замыкания. Суть метода заключается
в том, что в схеме выделяется ветвь, в
которой нужно найти ток, а вся оставшаяся
часть схемы заменяется активным
двухполюсник – эквивалентный генератор.
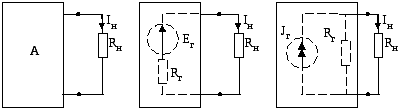
Существуют две схемы замещения активного
двухполюсника (см рис 20.): 1-двухполюсник
состоит из источника напряжения, ЭДС –
![]()
и сопротивления
![]() .
.
2- двухполюсник состоит из источника
тока –![]() и
и
проводимости
![]() .
.
|
Рис. |
Чтобы определить ЭДС генератора
![]() ,
,
следует найти напряжение холостого
хода–![]()
относительно выходных зажимов
эквивалентного генератора, это и будет
искомая ЭДС. Для того чтобы найти
сопротивление генератора
![]() ,
,
следует найти сопротивление относительно
выходных зажимов генератора. После
определения
![]() и
и
![]()
легко найти ток короткого замыкания –
![]() .
.
Источник тока эквивалентного генератора–![]()
равен току короткого замыкания
![]() .
.
При известных параметрах эквивалентного
генератора можно найти ток в нагрузке:
![]() . (44)
. (44)
Если известен ток короткого замыкания
![]() ,
,
применив правило разброса легко найти
ток в нагрузке, используя соотношение:
|
Рис. |
![]() . (45)
. (45)
Для более глубокого понимания целесообразно
рассмотреть пример.
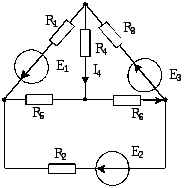
Пример
4: Даны сопротивления и ЭДС:
![]()
Определить ток
![]()
в четвёртой ветви, используя метод
эквивалентного генератора.
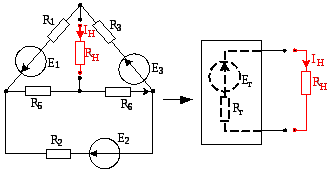
Решение: Прежде всего, необходимо
преобразовать схему в двухполюсник:
выделяем ветвь с сопротивлением
![]() ,
,
а всю оставшуюся часть заменяем
двухполюсником – эквивалентным
генератором. Затем находим напряжение
холостого хода и сопротивление
эквивалентного генератора.
|
|
 Рис
РисСоставляем матрицу сопротивлений
и столбцевую матрицу правых частей, и
находим необходимые токи и напряжение
холостого хода (см. рис 23):

|
Рис |
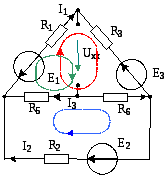
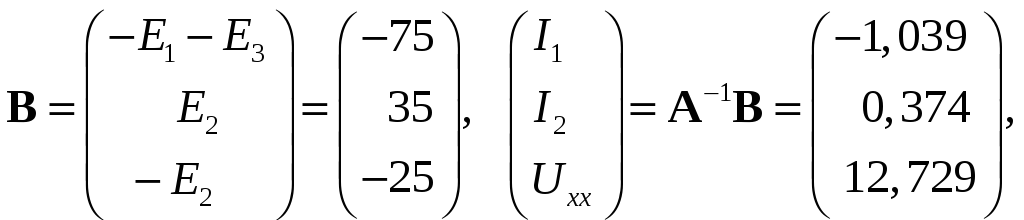
Таким образом имеем напряжение холостого
хода
![]()
|
Рис. |
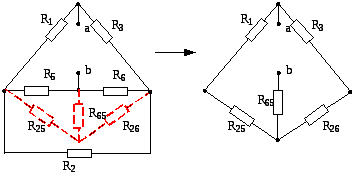
Для определения сопротивления
генератора – сопротивления относительно
зажимов a и b,
необходимо треугольник сопротивлений
преобразовать в звезду и затем сделать
некоторые преобразования:
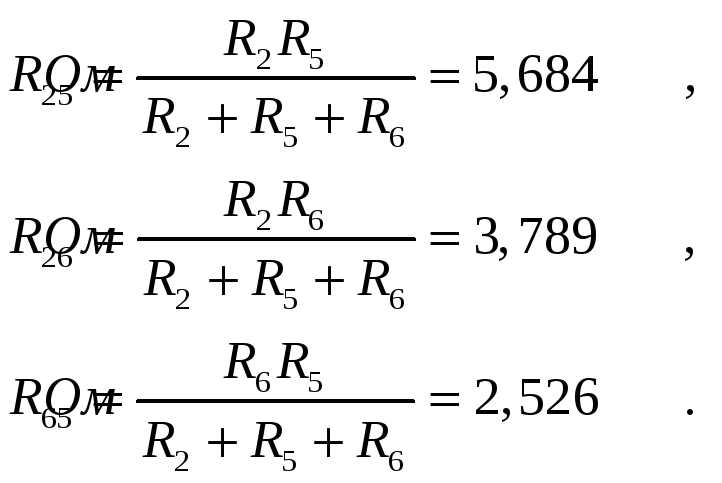
![]()
В соответствии со схемой эквивалентного
генератора находим ток короткого
замыкания и ток в 4-той ветви
![]()
![]()
Mathcad
(характеристики генератора)
§ 1.12 Характеристики эквивалентного генератора
Важной характеристикой эквивалентного
генератора является
1. Выходная характеристика ![]() :
:
|
Рис |
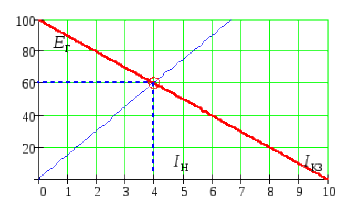
![]()
На этой зависимости ток изменяется в
пределах
![]() ,
,
а напряжение в пределах
![]() ,
,
![]() .
.
Выходная характеристика хороша тем,
что позволяет определить ток нагрузки
![]()
при любой величине сопротивления
заданной нагрузки
![]() .
.
Для того чтобы определить ток нагрузки
![]() ,
,
достаточно умножить произвольное
значение тока на величину сопротивления
нагрузки
![]()
(см. рис.), затем отложить найденное
значение на графике и соединить с началом
координат (на графике это сделано для
нагрузки
![]()
). Опустив перпендикуляр с точки
пересечения полученной кривой и выходной
характеристики на ось токов, мы получаем
значение интересующего нас тока. В нашем
случае
![]() .
.
Еще несколько важных характеристик
генератора – мощность нагрузки
![]() ,
,
в зависимости от величины нагрузки, и
мощность нагрузки
![]() в
в
зависимости от величины тока нагрузки.
-
Определим мощность в нагрузке как
функцию сопротивления нагрузки
 .
.
 .
.
|
Рис 24. |
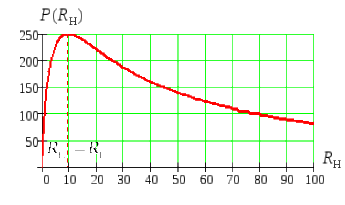
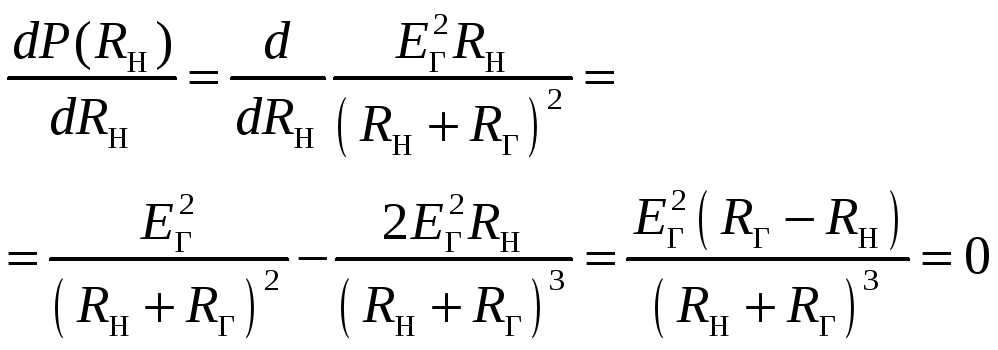
Определим, в каком случае выделяется
максимальная мощность в нагрузке. Для
этого нужно взять производную выражения
![]() по
по
![]() и
и
прировнять нулю:
 .
.
Из последнего выражения следует, что
для выделения максимальной мощности
необходимо выполнение условия
![]() .
.
-
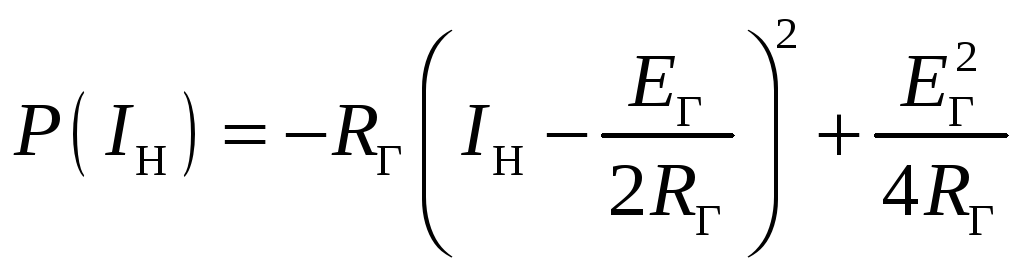
Определим мощность в нагрузке как
функцию тока нагрузки
 .
.
После несложных преобразований получаем:
![]() .
.
Дополняя это выражение до полного
квадрата, получаем:
|
Рис |
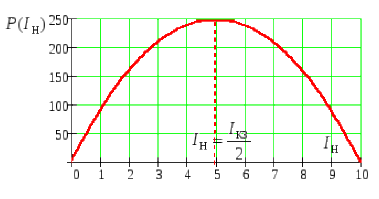
Таким образом максимум
![]()
приходится на величину тока
![]()
равного половине тока короткого
замыкания, при этом мощность равна
величине
![]()
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #

Активное r и реактивные X сопротивления складываются не арифметически, а геометрически. Их сумма равна гипотенузе треугольника, катеты которого активное и реактивное сопротивления. Реактивное сопротивление в генераторе также, как и аиктвное, препятствует прохождению тока. На нем также происходит падение напряжения (но со сдвигом фазы). Отличие реактивного сопротивления от активного в том, что на реактивном сопротивлении не теряется мощность. При большом внутреннем активном сопротивлении генератора падает КПД. А большое реактивное сопротивление даже полезно в определенных случаях. Оно несколько стабилизирует выходное напряжение при изменении нагрузки и ограничивает ток короткого замыкания.
Для расчета надо иметь данные для двух частот вращения генератора.
Ток, протекающий в цепи при первой частоте вращения равен:

Ток, протекающий при второй, более высокой частоте вращения:

Из этих двух уравнений несложно найти X1 и r


В формулах n1 и n2 – первая и вторая частота вращения генератора. Можно подставлять в об/мин или об/с. Важно, чтобы в одной формуле единицы были одинаковы.
Индуктивное сопротивление X рассчитано для первой, нижней, частоты вращения. Для любой другой частоты вращения его легко пересчитать

В качестве примера рассчитаем внутренние сопротивления двух генераторов. ВГБЖ – 02(64)/28,5-200-02 и Г303В.


При скорости вращения 120 об/мин E1 = 23 В, U1 = 19,5 В, I1 = 2,75 А.
При скорости вращения 500 об/мин E2 = 95 В, U2 = 71 В, I2 = 9 А.
Величина реактивного сопротивления при 120 об/мин.
 Ом.
Ом.
Если E2, U2, I2 подставить для частоты в 300 и 400 об/мин, то значение X120 получатся 1,51 и 1,57 Ом. Среднее значение 1,56 Ом. Точность получается очень хорошая. Но для скорости вращения в 180 об/мин расчет дает отрицательное значение под корнем. На кривой тока видно, что при 180 об/мин точка смещена вверх от плавного хода кривой. Погрешность при измерении характеристик оказалась слишком большой. Для надежного расчета точки надо брать далеко друг от друга по оси скорости вращения.
Посчитать внутреннее активное сопротивление генератора не получается. Сопротивление нагрузки на графиках указано 14 Ом. Но если разделить напряжение на ток, то при 120 и 500 об/мин получится: 19,5/2,75 = 7,1 Ом. 71/9 = 7,9 Ом. Сопротивление нагрузки указано ошибочно. Скорее всего, генератор испытывался под нагрузкой 7 Ом. Повышение величины нагрузочного сопротивления с ростом оборотов связано с тем, что либо сопротивление раскалилось и возросло от нагрева или же сопротивление намотано в катушку и на высоких частотах приобретает заметную индуктивную составляющую. Можно принять сопротивление нагрузки равным 7,5 Ом, тогда внутреннее активное сопротивление генератора равно
 Ом.
Ом.
С учетом неопределенности сопротивления нагрузки, внутреннее сопротивление лежит в пределах 0,32 – 1,12 Ом.
Индуктивное сопротивление при 500 об/мин, а такие обороты реальны для ветряка, возрастает до 1,56*500/120 = 6,5 Ом и заметно влияет на величину тока в нагрузке. Поэтому его необходимо учитывать при расчетах. Иначе ошибка может быть значительна. Внутреннее активное сопротивление генератора имеет малую величину, и даже такая большая погрешность в его определении мало скажется на величине тока в нагрузке.


На этом графике не показаны кривые тока. Но ток легко вычислить, разделив напряжение на нагрузке, на сопротивление. При сопротивлении наргузки 10 Ом и оборотах 360 и 2000 об/мин получится
 Ом
Ом
 Ом
Ом
Реактивное сопротивление на высоких оборотах у этого генератора будет тоже большим. Этот генератор высокооборотистый. Номинальные обороты около 6000 об/мин. При 2000 об/мин. X2000 = 1,74*2000/360 = 9,7 Ом. При 6000 об/мин. X6000 = 1,74*6000/360 = 29 Ом
Источник
Эковатт: Определение внутреннего сопротивления генератора

Как по характеристикам генератора определить его внутреннее активное и индуктивное сопротивления
Если имеются в наличии скоростные характеристики генератора: зависимость ЭДС от оборотов, напряжения на нагрузке от оборотов и тока от оборотов, то нетрудно определить сопротивление обмоток генератора r и его реактивное (индуктивное) сопротивление X. Индуктивное сопротивление обмоток растет с ростом частоты вырабатываемого напряжения, т.е. с ростом числа оборотов. Ветряк может работать в диапазоне ветров 2,5 – 12 м/с и реактивное сопротивление может изменяться в 5 раз. Достаточно вычислить реактивное сопротивление для одной частоты вращения генератора. Для других скоростей вращения сопротивление пересчитывается пропорционально изменению скорости вращения.
Эквивалентная схема генератора состоит из источника ЭДС и двух сопротивлений: X и r, которые расположены внутри генератора. R – это сопротивление нагрузки.

 |
Активное r и реактивные X сопротивления складываются не арифметически, а геометрически. Их сумма равна гипотенузе треугольника, катеты которого активное и реактивное сопротивления. Реактивное сопротивление в генераторе также, как и аиктвное, препятствует прохождению тока. На нем также происходит падение напряжения (но со сдвигом фазы). Отличие реактивного сопротивления от активного в том, что на реактивном сопротивлении не теряется мощность. При большом внутреннем активном сопротивлении генератора падает КПД. А большое реактивное сопротивление даже полезно в определенных случаях. Оно несколько стабилизирует выходное напряжение при изменении нагрузки и ограничивает ток короткого замыкания. Для расчета надо иметь данные для двух частот вращения генератора. Ток, протекающий в цепи при первой частоте вращения равен:
Ток, протекающий при второй, более высокой частоте вращения:
Из этих двух уравнений несложно найти X1 и r
В формулах n1 и n2 – первая и вторая частота вращения генератора. Можно подставлять в об/мин или об/с. Важно, чтобы в одной формуле единицы были одинаковы. Индуктивное сопротивление X рассчитано для первой, нижней, частоты вращения. Для любой другой частоты вращения его легко пересчитать
В качестве примера рассчитаем внутренние сопротивления двух генераторов. ВГБЖ и ГЗОЗВ. При скорости вращения 120 об/мин E1 = 23 В, U1 = 19,5 В, I1 = 2,75 А. При скорости вращения 500 об/мин E2 = 95 В, U2 = 71 В, I2 = 9 А. Величина реактивного сопротивления при 120 об/мин.
Если E2, U2, I2 подставить для частоты в 300 и 400 об/мин, то значение X120 получатся 1,51 и 1,57 Ом. Среднее значение 1,56 Ом. Точность получается очень хорошая. Но для скорости вращения в 180 об/мин расчет дает отрицательное значение под корнем. На кривой тока видно, что при 180 об/мин точка смещена вверх от плавного хода кривой. Погрешность при измерении характеристик оказалась слишком большой. Для надежного расчета точки надо брать далеко друг от друга по оси скорости вращения. Посчитать внутреннее активное сопротивление генератора не получается. Сопротивление нагрузки на графиках указано 14 Ом. Но если разделить напряжение на ток, то при 120 и 500 об/мин получится: 19,5/2,75 = 7,1 Ом. 71/9 = 7,9 Ом. Сопротивление нагрузки указано ошибочно. Скорее всего, генератор испытывался под нагрузкой 7 Ом. Повышение величины нагрузочного сопротивления с ростом оборотов связано с тем, что либо сопротивление раскалилось и возросло от нагрева или же сопротивление намотано в катушку и на высоких частотах приобретает заметную индуктивную составляющую. Можно принять сопротивление нагрузки равным 7,5 Ом, тогда внутреннее активное сопротивление генератора равно
С учетом неопределенности сопротивления нагрузки, внутреннее сопротивление лежит в пределах 0,32 – 1,12 Ом. Индуктивное сопротивление при 500 об/мин, а такие обороты реальны для ветряка, возрастает до 1,56*500/120 = 6,5 Ом и заметно влияет на величину тока в нагрузке. Поэтому его необходимо учитывать при расчетах. Иначе ошибка может быть значительна. Внутреннее активное сопротивление генератора имеет малую величину, и даже такая большая погрешность в его определении мало скажется на величине тока в нагрузке.
На этом графике не показаны кривые тока. Но ток легко вычислить, разделив напряжение на нагрузке, на сопротивление. При сопротивлении наргузки 10 Ом и оборотах 360 и 2000 об/мин получится
Реактивное сопротивление на высоких оборотах у этого генератора будет тоже большим. Этот генератор высокооборотистый. Номинальные обороты около 6000 об/мин. При 2000 об/мин. X2000 = 1,74*2000/360 = 9,7 Ом. При 6000 об/мин. X6000 = 1,74*6000/360 = 29 Ом Электрика, альтернативная энергия,электрооборудование, внутреннее сопротивление генератора Источник Как определить сопротивление нагрузки генератораJLCPCB, всего $2 за прототип печатной платы! Цвет — любой! Зарегистрируйтесь и получите два купона по 5$ каждый:https://jlcpcb.com/cwc |





 Ом.
Ом. Ом.
Ом.

 Ом
Ом Ом
ОмМетод эквивалентного генератора:
Метод эквивалентного генератора рационально применять в случае необходимости определения тока (напряжения, мощностн и др.) только одной ветви сложной электрической цепи.
Для этой цели разбивают сложную электрическую цепь на две части — на сопротивление R, ток которого 
Активным этот двухполюсник называют потому, что в нем имеется источник ЭДС. Этот активный двухполюсник обладает определенной ЭДС 
Ток в резисторе с сопротивлением R определяют по закону Ома
Таким образом, определение тока  сводится к вычислению ЭДС эквивалентного генератора и его внутреннего сопротивления
сводится к вычислению ЭДС эквивалентного генератора и его внутреннего сопротивления  .
.
Величина ЭДС определяется любым методом расчета цепей постоянного тока относительно точек А а В при разомкну-клеммах, т. е. в режиме холостого хода. Практически эту ЭДС о измерить вольтметром, подключенным к клеммам А и В холостом ходе.
Внутреннее сопротивление эквивалентного генератора  выявляется относительно точек А и В после предварительной смены всех источников сложной схемы эквивалентного генера-а их внутренними сопротивлениями.
выявляется относительно точек А и В после предварительной смены всех источников сложной схемы эквивалентного генера-а их внутренними сопротивлениями.
Практически для определения внутреннего сопротивления эквивалентного генератора измеряют амперметром ток между точки А и В работающего двухполюсника при коротком замыкании так как сопротивление амперметра настолько мало, что им можно пренебречь. Тогда

где  — напряжение холостого хода,
— напряжение холостого хода,  — ток короткого замыкания.
— ток короткого замыкания.
Такой метод практического определения внутреннего сопротивления эквивалентного генератора  называется методом хо-ого хода и короткого замыкания. Расчет параметров эквивалентного генератора, его ЭДС и внутреннего сопротивления
называется методом хо-ого хода и короткого замыкания. Расчет параметров эквивалентного генератора, его ЭДС и внутреннего сопротивления  , рассматриваются в примерах 4.12 4.13.
, рассматриваются в примерах 4.12 4.13.
Пример 4.12
Определить ток в сопротивлении  , подключенном к точкам А В электрической цепи (рис. 4.8а) примера 4.6 методом эквивалентного генератора.
, подключенном к точкам А В электрической цепи (рис. 4.8а) примера 4.6 методом эквивалентного генератора.
Решение
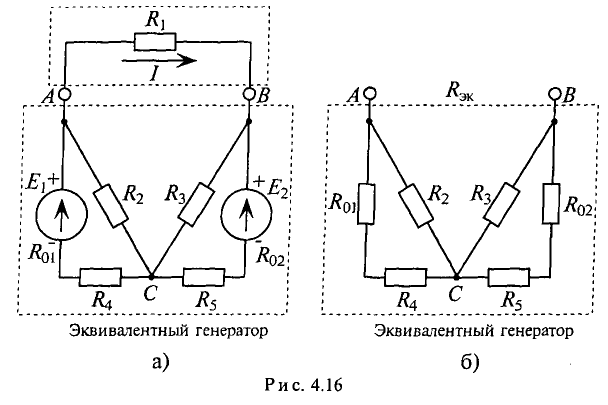
Для определения тока  в сопротивлении
в сопротивлении  определим ЭДС эквивалентного генератора
определим ЭДС эквивалентного генератора  (рис. 4.16а) и его внутреннее сопротивление
(рис. 4.16а) и его внутреннее сопротивление  (рис. 4.166) при холостом ходе, т. е. разомкнутой цепи (между точками А и В).
(рис. 4.166) при холостом ходе, т. е. разомкнутой цепи (между точками А и В).

Знак «минус» обусловлен тем, что источники в схеме включены встречно и потенциал в точке А больше потенциала в точке В, так как  (см. пример 4.6).
(см. пример 4.6).
Напряжение

Напряжение

Следовательно,  Внутреннее сопротивление эквивалентного генератора
Внутреннее сопротивление эквивалентного генератора
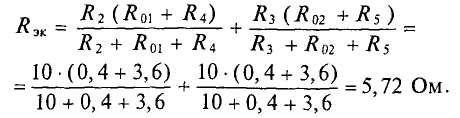
Искомый ток 
Такой же ток получен в примере 4.6 на сопротивлении 
Пример 4.13
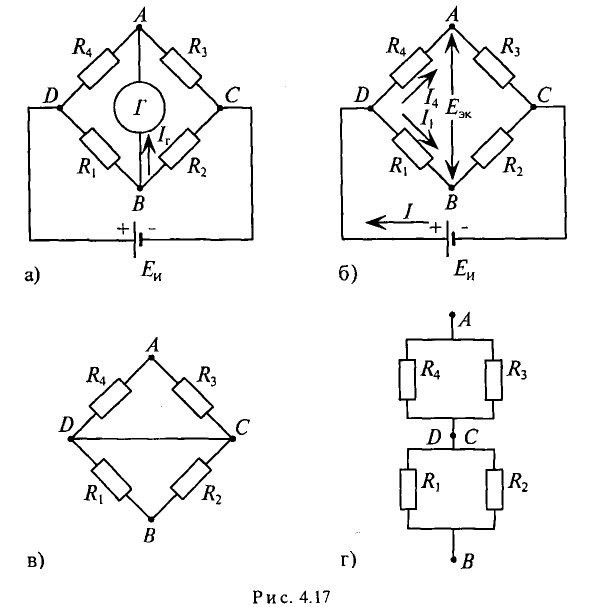
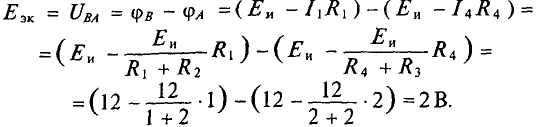
В схеме рис. 4.17а сопротивления плеч моста равны 

Сопротивление гальванометра Rr = 98,33 Ом, ЭДС источника  . Методом эквивалентного генератора определить в ветви гальванометра (между точками А и В).
. Методом эквивалентного генератора определить в ветви гальванометра (между точками А и В).
Решение
Для определения тока в цепи гальванометра  методом эквивалентного генератора необходимо вычислить ЭДС эквивалентного генератора
методом эквивалентного генератора необходимо вычислить ЭДС эквивалентного генератора  между точками А и В (рис. 4.176) и внутреннее сопротивление эквивалентного генератора
между точками А и В (рис. 4.176) и внутреннее сопротивление эквивалентного генератора  относительно точек А и В при присутствии гальванометра, заменив в схеме (рис. 4.17в) источник ЭДС
относительно точек А и В при присутствии гальванометра, заменив в схеме (рис. 4.17в) источник ЭДС  его внутренним сопротивлением (
его внутренним сопротивлением ( = 0) равным нулю.
= 0) равным нулю.
Для определения ЭДС эквивалентного генератора  принимают потенциал точки С схемы (рис. 4.176) равным нулю, т. е. фс=о.
принимают потенциал точки С схемы (рис. 4.176) равным нулю, т. е. фс=о.
Тогда
При замене источника ЭДС  его внутренним сопротивлением, равным нулю, замыкаются накоротко точки С и D схемы (рис. 4.17в). При этом (рис. 4.17г) сопротивления
его внутренним сопротивлением, равным нулю, замыкаются накоротко точки С и D схемы (рис. 4.17в). При этом (рис. 4.17г) сопротивления  соединены между собой параллельно. Также параллельно соединены между собой сопротивления
соединены между собой параллельно. Также параллельно соединены между собой сопротивления  . Между точками А и В сопротивления
. Между точками А и В сопротивления  соединены последовательно. Следовательно, сопротивление эквивалентного генератора относительно точек А и В будет равно
соединены последовательно. Следовательно, сопротивление эквивалентного генератора относительно точек А и В будет равно

Тогда ток в ветви с гальванометром, который направлен из точки В в точку А, т. е. из точки с большим потенциалом в точку с наименьшим потенциалом (рис. 4.17а), будет равен

Метод эквивалентного генератора (активного двухполюсника)
Все методы, рассмотренные ранее, предполагали расчет токов одновременно во всех ветвях цепи. Однако в ряде случаев бывает необходимым контролировать ток в одной отдельно взятой ветви. В этом случае применяют для расчета метод эквивалентного генератора.
Пусть дана некоторая электрическая цепь, которую заменим активным двухполюсником (рис. 3.10), оставив только ветвь  в которой необходимо рассчитать ток.
в которой необходимо рассчитать ток.
Сначала, введем в ветвь  два источника ЭДС
два источника ЭДС  и
и  одинаковые по величине и противоположно направленные:
одинаковые по величине и противоположно направленные:

Затем, используя принцип наложения, данную цепь представим суммой двух цепей. В первой оставим все источники активного двухполюсника и источник ЭДС  Вторая цепь представляет собой пассивный двухполюсник, имеющий входное сопротивление
Вторая цепь представляет собой пассивный двухполюсник, имеющий входное сопротивление  и источник ЭДС
и источник ЭДС 
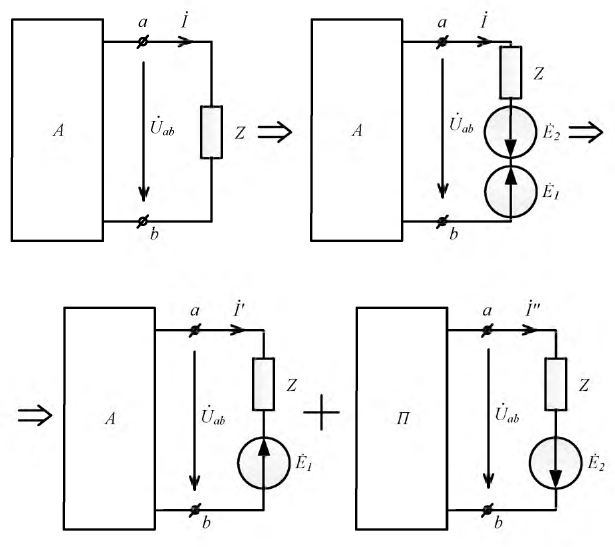
Рис. 3.10. Преобразование исходного двухполюсника в сумму двух цепей
На основании принципа наложения ток ветви 

Поскольку  и они могут быть любые по величине, то подберем их значения такими, чтобы ток
и они могут быть любые по величине, то подберем их значения такими, чтобы ток  был равен нулю. Для этого выберем
был равен нулю. Для этого выберем 

Напряжение на зажимах источника в режиме холостого хода численно равно его ЭДС. Тогда активный двухполюсник с источником  может быть представлен в виде, представленном на рис. 3.11:
может быть представлен в виде, представленном на рис. 3.11:
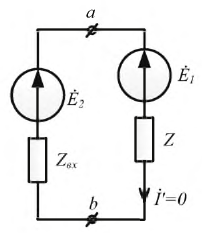
Рис. 3.11. Схема замещения активного двухполюсника
В этой схеме ЭДС  численно равна
численно равна  активного двухполюсника, и, следовательно, ток:
активного двухполюсника, и, следовательно, ток:

Таким образом, ток в ветви 

Пусть дана цепь (рис. 3.12), в которой необходимо рассчитать ток  методом эквивалентного генератора.
методом эквивалентного генератора.
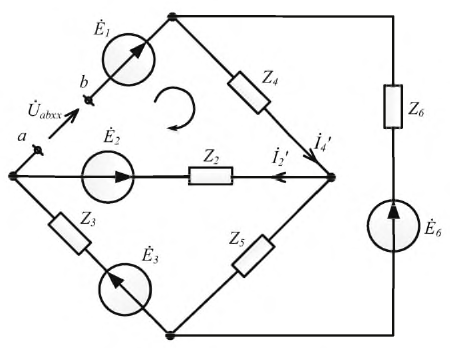
Рис. 3.12. Исходная цепь
Последовательность расчета:
1. Разомкнем ветвь с сопротивлением  или примем
или примем 
2. Зададим положительное направление  и для произвольно выбранных положительных направлений токов. Например, для первого контура запишем уравнение по второму закону Кирхгофа:
и для произвольно выбранных положительных направлений токов. Например, для первого контура запишем уравнение по второму закону Кирхгофа:

3. Токи  и
и  в преобразованной схеме по рис. 3.13 рассчитываем любым известным методом, например, методом контурных токов
в преобразованной схеме по рис. 3.13 рассчитываем любым известным методом, например, методом контурных токов

Тогда 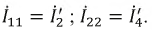
4. Определим эквивалентное сопротивление пассивного двухполюсника. Для этого мысленно закоротим все источники ЭДС исходной цепи, оставляя в схеме для реальных источников их внутренние сопротивления.
В образовавшейся схеме пассивного двухполюсника невозможно определить эквивалентное сопротивление относительно зажимов  так как нет последовательно-параллельного соединения приемников, поэтому необходимо выполнить преобразование какого-либо участка цепи из «треугольника» в «звезду» или выполнить обратное преобразование.
так как нет последовательно-параллельного соединения приемников, поэтому необходимо выполнить преобразование какого-либо участка цепи из «треугольника» в «звезду» или выполнить обратное преобразование.
Преобразуем, например, «треугольник» сопротивлений  в «звезду»
в «звезду»  При этом получится схема с последовательно-параллельным соединением приемников (рис. 3.14).
При этом получится схема с последовательно-параллельным соединением приемников (рис. 3.14).
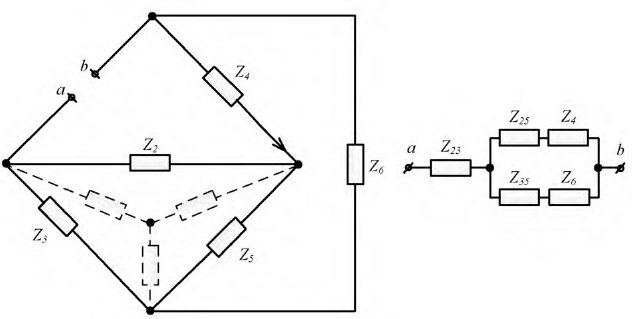
Рис. 3.14. Схема пассивного двухполюсника
Сопротивления этой схемы будут:
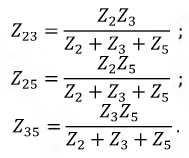
Входное сопротивление цепи  относительно зажимов
относительно зажимов  и
и  запишем в виде:
запишем в виде:
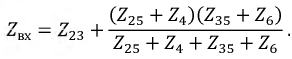
Окончательно имеем:
- Теоремы теории цепей
- Теорема обратимости (или взаимности)
- Теорема компенсации
- Теорема об изменении токов в электрической цепи при изменении сопротивления в одной ветви
- Метод свертывания электрической цепи
- Метод преобразования схем электрических цепей
- Параллельное соединение генераторов
- Метод узловых и контурных уравнений
Электродвижущая сила и внутреннее сопротивление ведут нескончаемую битву внутри наших источников напряжения. Что стоит за этими концепциями? Каковы их отношения и каковы последствия их существования?
Электродвижущая сила
Электродвижущая сила звучит как термин из учебника по физике, и мало кто даже из радиолюбителей точно знает, для чего она нужна и что это значит. В Википедии описание выглядит так:
Электродвижущая сила (ЭДС) – фактор, вызывающий протекание тока в электрической цепи, равный электрической энергии, полученной единичным зарядом, перемещаемым в устройстве (источнике) электрического тока в направлении, противоположном силе электрического поля, действующего на это обвинение.
Понять это с первого раза может далеко не каждый. Единственное, что стоит помнить из этого описания, – это тот факт, что электродвижущую силу часто сокращают как ЭДС – это просто короче и проще. В английском языке аббревиатура EMF, которая означает Electromotive Force.

Начнем с того, что электродвижущую силу очень часто путают с напряжением, наверное потому, что оба эти значения выражаются в вольтах. Но если посмотрим на определение напряжения, то можно увидеть что оно полностью отличается от описания ЭДС и намного короче:
Электрическое напряжение – разница электрических потенциалов между двумя точками электрической цепи или электрического поля.
Так является ли ЭДС чем-то совершенно другим, чем напряжение? Не совсем. Фактически, ЭДС и напряжение – это одно и то же физическое понятие. Они оба вызывают протекание тока и оба говорят об энергии, которую несет электрический заряд. Что же делает их особенными?

Говоря проще – ЭДС это то что хотим, а напряжение – это то что получаем. Рассмотрим тему на примере водяной установки. В этом случае можно назвать электродвижущую силу номинальным давлением насоса, который достаем из коробки. Номинальный означает то, что насос теоретически способен производить. Другими словами, ЭДС описывает сколько «толкающей силы» источник может дать. Но действительно ли получим эту силу на практике?
Теперь переходим к напряжению, эквивалентом которого в водяной системе является фактическое давление воды, которое получаем после подключения нашего насоса. Конечно любые засоры в трубах или повреждение установки снижают это давление, так же как резистор вызывает падение напряжения в цепи. Но на интересует может ли насос протолкнуть воду с мощностью, обещанной производителем, и обычно это не так. Точно так же, если у нас есть аккумулятор с ЭДС 9 В, то после его подключения и измерения напряжения на клеммах может оказаться, что там всего 8,5 В. Почему? У каждого источника напряжения есть свои недостатки, которые нельзя преодолеть физически.
Таким образом, ЭДС – это виртуальная величина. Можем определить это как напряжение, которого достигли бы, если бы аккумулятор не имел дефектов и его эффективность составляла 100%. Электроника даже изобрела концепцию идеального источника напряжения, заключающуюся в том, что в определенных ситуациях человек закрывает глаза на недостатки источника и принимает рабочее напряжение, равное ЭДС (U = ЭДС). Но в действительности идеальных батарей, аккумуляторов и генераторов не существует, поэтому вырабатываемое во время работы напряжение всегда ниже значения ЭДС.
Эта потеря велика или нет? Чтобы проверить можно взять обычную батарею AA. На этикетке указано 1,5 В. Это значение производители называют номинальным напряжением. Так это имеется ввиду ЭДС или рабочее напряжение? Чтобы измерить ЭДС батареи, понадобится вольтметр. Важно чтобы измеряемая батарея была новой – надо видеть полный заряд, которым ее снабдил производитель, а не какое-либо остаточное напряжение в использованной батарее.
Можете измерить несколько батарей от разных производителей, и каждая из них даст разный результат. Один раз 1,60 В, в другой 1,65 В или 1,57 В. Почему же на каждой из этих батарей есть метка 1,5 В, хотя их ЭДС выше? Установите на них небольшой резистор, и результат колеблется между 1,55 В и 1,62 В, что все равно больше, чем предсказывал производитель. Что же тут происходит?

Если посмотрим в книги по электротехнике, те, которые касаются аккумуляторов, то там найдем определение до 10 различных типов напряжения! Вот несколько примеров:
- Теоретическое напряжение (theoretical voltage) – величина энергии, возникающая от батарей в зависимости от материалов. Например использование цинка и меди в качестве электродов даст напряжение 1,1 В, в то время как самые современные литиевые батареи могут достигать даже 3,5 В.
- Напряжение холостого хода (open-circuit voltage) – можем описать их как «напряжение батареи из коробки» или просто ЭДС. Это значение часто немного ниже теоретического напряжения, потому что конструкция батареи влечет за собой определенные ограничения.
- Рабочее напряжение (closed-circuit voltage) – батареи под нагрузкой теряют часть ЭДС. Насколько велико падение зависит от нескольких вещей, о которых расскажем далее.
- Номинальное напряжение – (nominal voltage) – ЭДС каждой батареи (угольной, щелочной или литиевой) может быть разным – иногда это 1,55 В, в другой раз, например, 1,62 В. Почему же тогда на каждой из них написано 1,5 В? Причина – стандартизация. Чтобы избежать путаницы и не заставлять потребителя задаваться вопросом, какое именно напряжение будет наилучшим в данном случае, было введено несколько стандартных напряжений, таких как 1,5 В, 3 В и 9 В, которым назначены ячейки. Во всех случаях ЭДС немного выше номинального напряжения, так что это «обман» в нашу пользу.
- Напряжение отключения (cut-off voltage) – при разрядке источник теряет энергию и, таким образом, снижает значение его ЭДС и рабочего напряжения. Через некоторое время наступит момент, когда напряжение станет слишком низким для продолжения питания устройства и он будет считаться разряженным. Но эта граница довольно плавная и зависит от нагрузки. Разряженный аккумулятор может не питать фонарик, но если поместим его в электронные часы, он сможет запитывать его еще несколько дней.
Откуда же это несоответствие? Ответ на вопрос требует изучения внутреннего сопротивления.
Внутреннее сопротивление
Сопротивление – это явление, которое можно рассматривать как положительное и отрицательное (плохое). Оно препятствует прохождению тока, забирает энергию у электронов и вызывает падение напряжения. Когда эти явления хороши? Когда хотим преобразовать электричество в тепло или свет. Без него не работали бы такие устройства, как бойлер, тостер, сушилка или лампочка.
Отрицательной стороной сопротивления будет то, что все кабели, которые подают энергию в дом и питают устройства, также обременены им. Следовательно, они также потребляют, точнее тратят впустую некоторую энергию. К счастью, сопротивление медных проводов очень низкое, и почти не почувствуются эти потери в домашних условиях.
Но есть еще один момент отрицательного сопротивления. Оно называется внутренним сопротивлением и возникает там, где меньше всего этого ожидаем – внутри источников напряжения.
Внутреннее сопротивление можно назвать узким местом источников напряжения. Это причина того, что рабочее напряжение ниже электродвижущей силы. Другими словами, оно тратит энергию еще до того, как оставит батареи или генераторы на электростанции. В нормальных условиях невозможно избежать внутреннего сопротивления. Это естественный недостаток всех источников электроэнергии – батарей, аккумуляторов, солнечных панелей, ветряных турбин или любых трехфазных генераторов, которые снабжают энергией наши дома. Откуда же оно взялось?
Внутреннее сопротивление генераторов
Начнем с генераторов переменного напряжения, потому что в их случае дело обстоит проще. Генераторы переменного тока – это просто большие электродвигатели. Они используют принцип электромагнитной индукции, то есть магнит, движущийся рядом с проводом, генерирует в нем ток.

Проще говоря, если возьмете неодимовый магнит и начнете его раскачивать возле какого-то провода, то создадите в нем электричество. Правда этого тока недостаточно для питания даже самого маленького светодиода. Во-первых, для генерации сильного тока требуется магнит гораздо большего размера, а во-вторых, гораздо больше проводов. Вращающийся магнит генерирует ток в десятках метров витой проволоки, которая его окружает. Так можно вкратце описать основы работы генераторов, типов конечно много, но здесь не будем останавливаться на них. Важно то, что это огромное количество спиральной проволоки (иногда заменяемой стержнями или листами) является важным элементом любого генератора, обеспечивая нужное количество движущихся электронов, реагирующих на вращение магнита. Примерно так работает любой генератор переменного тока.

У каждого, даже самого лучшего проводника, есть сопротивление. Обмотки, без которых было бы невозможно производить электричество, в то же время являются слабым звеном каждого генератора. С одной стороны они позволяют току течь, с другой – нагреваются через существующее сопротивление, посылая часть энергии в воздух в виде тепла.

Как с этим справляется электроэнергетика? Во-первых, турбогенераторы вырабатывают очень высокое напряжение. Благодаря этому можно добиться такой же мощности при довольно низкой силе тока, и чем меньше ток – тем меньше потери из-за сопротивления. Также надо помнить, что электричество должно пройти сотни километров, прежде чем достигнет домов, поэтому стоит поддерживать высокое напряжение как можно дольше. На практике оно снижается до 220 В только на трансформаторных подстанциях, разбросанных в городах. Трансформатор – это тоже устройство, сделанное из большого количества проволоки, и на нем тоже происходит падение напряжения. Его величина зависит от нагрузки, поэтому чем больше подключено к сети оборудование, тем ниже измеряемое напряжение в розетке.
Внутреннее сопротивление батареи
Батарея или аккумулятор – это устройства, внутри которых нет проводов, но это не значит, что на них не распространяется внутреннее сопротивление. Ячейки по существу состоят из двух электродных материалов (положительного и отрицательного), которые погружены в электролит. Один из электродов, например, из цинка, отдает электроны, другой, например, из меди – принимает электроны. Соединение обоих электродов проводом позволяет возникнуть потоку электронов между ними. Поддержание обмена возможно благодаря электролиту, специальному раствору, обеспечивающему необходимые элементы химической реакции. Примерно так работают аккумуляторы.

Рассмотрим где в аккумуляторе скрывается внутреннее сопротивление. Ответ непрост, потому что в ячейке происходит множество процессов, каждый из которых добавляет свой вклад к сопротивлению. Основные из них:
- Дефекты электродов – каждый материал имеет дефекты в виде поврежденной структуры или примесей. Это, в свою очередь, влияет на способность электродов отдавать и принимать электроны.
- Ограниченная проводимость электролита – электролит заполнен ионами (положительно и отрицательно заряженными атомами), которые перемещаются между электродами, чтобы обеспечить баланс заряда и предотвратить его накопление (поляризацию). К сожалению, ионы являются частицами намного тяжелее и медленнее электронов, поэтому их поток характеризуется определенным естественным сопротивлением.
- Коррозия электродов – продукты химических реакций, происходящих между электролитом и электродами, должны куда-то уходить. Иногда они создают газ, который выходит из батарей с помощью специальных микроскопических клапанов, иногда это твердое вещество, которое невозможно удалить наружу. К сожалению, в случае некоторых типов аккумуляторов эти отходы могут оседать на электродах, создавая на них своего рода покрытие, которое значительно мешает правильной работе аккумулятора.
- Износ электродов – обмен электронами связан с изменением структуры электродов. Отрицательный электрод (например, цинк), отдавая электроны, буквально растворяется в электролите. Его уменьшающаяся поверхность означает, что он не может выпускать электроны с той же скоростью, что значительно снижает рабочие параметры батареи, особенно в более старом типе.
Приведенные выше примеры показывают, что сопротивление батареи намного более проблематично, чем сопротивление генератора, по крайней мере, по нескольким причинам:
- Чтобы производить батареи с низким внутренним сопротивлением, многие факторы должны быть идеально согласованы друг с другом, что непросто.
- Батареи работают на основе химических реакций, и они, естественно, чувствительны к температуре – слишком низкая или слишком высокая температура немедленно истощит элемент.
- Внутреннее сопротивление батареи переменное. Из-за разрушения электролита и электродов сопротивление батареи увеличивается по мере ее разряда. Только новейшие литий-ионные конструкции способны минимизировать эту проблему.
Как насчет того, чтобы попытаться устранить проблему внутреннего сопротивления, увеличивая напряжение ячеек? Здесь мы сталкиваемся с рядом ограничений. Во-первых, не выйдет получать более 3,5 В от химических реакций (по крайней мере в настоящее время). Вот почему батареи с напряжением 9 В строятся путем соединения обычно 6 ячеек по 1,5 В каждая. А аккумуляторы питающие электромобили Тесла, вырабатывают напряжение 400 В, весят более 500 кг и состоят из 8256 небольших литий-ионных элементов. Аккумуляторы Tesla занимают всю поверхность пола автомобиля.
Как рассчитать внутреннее сопротивление
Раз уж внутреннее сопротивление невозможно победить, стоит хотя бы выяснить, как его можно измерить и каких значений оно может достичь. Чтобы узнать это нужно будет сделать 3 измерения.
Каждый мультиметр имеет возможность измерять сопротивление. Но нельзя пытаться измерить внутреннее сопротивление любого источника напряжения Омметром. Попытка измерить внутреннее сопротивление трансформатора, вставив щупы измерителя в розетку, – одна из худших идей, которые можно придумать. Никогда не пытайтесь это сделать!
Как тогда правильно измерить внутреннее сопротивление АКБ? Есть два метода, и вот более простой. Сначала измерьте ЭДС аккумулятора. Установите мультиметр на измерение постоянного напряжения и приложите щупы к обоим полюсам батареи.

Затем нужно измерить рабочее напряжение АКБ. Лучше всего взять резистор с известным значением, приложить его концы к обоим полюсам и снова измерить напряжение, как это делали только что.
Как видите, разница между ЭДС и напряжением новой батареи очень мала – всего 0,013 В. Следовательно, чем лучше у вас прибор, тем больше вероятность, что вы сможете измерить его. Но и не забудьте еще измерить сопротивление резистора, который используете. Тот факт, что он 47 Ом, не означает, что у него такое сопротивление. В данном случае это 46,1 Ом.
Имея все измерения (ЭДС, рабочее напряжение, сопротивление резистора), достаточно запомнить Закон Ома, потому что именно по нему сделаем необходимые вычисления:

Теперь выполним 3 простых шага:
- Шаг 1 – Рассчитайте разницу между ЭДС и рабочим напряжением. Это значение, поглощаемое внутренним сопротивлением, или падение напряжения на внутреннем сопротивлении. В этом случае 1,595 В – 1,583 В = 0,013 В.
- Шаг 2 – Рассчитайте ток, протекающий в цепи во время работы. Для этого делим рабочее напряжение на сопротивление резистора. Получаем 1,583 В / 46,1 Ом = 0,034 А.
- Шаг 3 – Вычисляем внутреннее сопротивление батареи, разделив падение напряжения, вызванное протекающим через нее током. Для этого эксперимента это будет 0,013 В / 0,034 А = 0,382 Ом.
Это много или мало? Зависит от того, какие батареи хотим использовать. Для сравнения, внутреннее сопротивление типичных батареек АА в лет 30 назад составляло от 1 Ом до 3 Ом, что в несколько раз больше, чем сегодня. Конечно, в 1980-х щелочные батареи только выходили на рынок, и литиевые приходилось ждать до 1995 года. Это показывает насколько сильно изменилась технология производства аккумуляторов за последние годы. Снижение внутреннего сопротивления аккумулятора позволяет снизить потери энергии, а значит повысить его КПД. Сегодняшние батареи способны питать гораздо больше энергоемких устройств, чем раньше, без сильного нагрева и поддержания постоянного напряжения в течение гораздо более длительного времени. Вот в принципе и вся теория, надеемся с практикой теперь у вас проблемы не возникнут. А если что осталось неясным – добро пожаловать на форум!
3. Симметричная нагрузка синхронного генератора
3.1. Взаимодействие МДС возбуждения и якоря
в режиме симметричной нагрузки. Реакция якоря
При симметричной нагрузке под действием ЭДС Ef в фазах якоря будут течь токи равной величины IА = IВ = IС = I. Ток якоря I создает практически синусоидальную МДС якоря Fa с амплитудой первой гармонической
 , (3.1)
, (3.1)
где m – число фаз (m = 3); I – действующее значение фазного тока; w и kО1 – число последовательно соединенных витков и обмоточный коэффициент для первой гармонической; р – число пар полюсов машины.
МДС вращается в пространстве с частотой вращения n1 = f1/p, где f1 – частота ЭДС обмотки якоря. Подставляя значение частоты изменения ЭДС якоря из формулы (2.3), определим частоту вращения МДС якоря
Рекомендуемые материалы
 . (3.2)
. (3.2)
Из формулы (5.2) следует, что МДС якоря вращается в пространстве синхронно с ротором, то есть с такой же скоростью и в ту же сторону, что и ротор. МДС возбуждения Ff неподвижна относительно ротора и вращается вместе с ротором с частотой n. Поэтому МДС возбуждения Ff и якоря Fa взаимно неподвижны и вращаются вместе с частотой n1 = n.
В результате взаимодействия взаимно неподвижных МДС Ff и Fa образуется результирующая МДС машины
 , (3.3)
, (3.3)
которая создает результирующий магнитный поток машины Фr.
Вследствие действия МДС якоря Fa результирующая МДС Fr отли-чается от МДС Ff . Результирующий поток Фr также не равен потоку Фf при холостом ходе. Следовательно, ток I и МДС Fa якоря изменяют магнитный поток машины при ее нагрузке. Действие МДС якоря на магнитное поле машины называют реакцией якоря. Реакция якоря зависит от угла ψ между ЭДС Ėf и током İ якоря, то есть от вида нагрузки генератора.
Активная нагрузка (ψ = 0). На рис. 5.1, а обмотки фаз якоря двухполюсной машины показаны в виде трех сосредоточенных катушек. Пунктиром изображены линии индукции Bf магнитного потока возбуждения.
Направления ЭДС и токов в фазах якоря определены по правилу “правой руки”. Так как угол ψ = 0 ЭДС Ėf и ток İ совпадают по фазе (в действительности угол ψ = 0, если в обмотку якоря наряду с активной включена некоторая емкостная нагрузка для компенсации индуктивности обмотки якоря) и максимальны в фазе А (рис. 5.1, а). Ее проводники А и Х находятся под центром полюсов, где индукция магнитного поля возбуждения максимальна.
Линии индукции Bа магнитного поля якоря направлены поперек полсов. МДС якоря Fа также действует по поперечной оси q – q машины независимо от положения ротора, так как ротор и МДС якоря Fа вращаются синхронно.

МДС Fа = Fаq и реакцию якоря называют поперечными.
Поперечная МДС якоря Fаq искажает результирующее магнитное по- ле машины, так как под одной (правой) половиной полюса магнитный по- ток увеличивается вследствие одинакового направления линий индукции Ва и Вf, а под другой (левой) – ослабляется за счет противоположного направления линий индукции Ва и Вf (рис. 3.1, а). Ось результирующего магнитного поля и МДС Fr смещаются навстречу вращению ротора. Если машина не насыщена, то результирующий поток Фr не меняется, так как число линий индукции, переходящих из полюса ротора в статор, одинаково при холостом ходе и при нагрузке с углом ψ = 0. В реальных условиях поперечная реакция якоря немного уменьшает поток Фr за счет насыщения сердечников машины под правой половиной полюса.
На векторной диаграмме (рис. .1, б) ток якоря I направлен по поперечной оси q, поэтому ток называют поперечным и обозначают Iq.
По закону Ампера на проводники якоря с током (и сам статор) в магнитном поле машины действуют электромагнитные силы fЭМ,
В случае активной нагрузке (ψ = 0) токи в проводниках якоря на каждом полюсном делении направлены одинаково и силы fЭМ действуют в одну сторону (рис. 3.1, в). Электромагнитные силы образуют электромагнитный вращающий момент МЭМС, стремящийся повернуть статор вслед за ротором. Статор обычно жестко закреплен и вращаться не может.
 Вследствие этого к ротору приложен такой же по величине электромагнитный момент МЭМР противоположного направления, стремящийся затормозить ротор. Под действием тормозного момента МЭМР частота вращения ротора будет снижаться и активная электрическая мощность, отдаваемая генератором нагрузке также уменьшится. Для поддержания частоты вращения ротора и отдаваемой активной мощности неизменными следует подвести к валу дополнительный вращающий механический момент ΔMВР для компенсации тормозного электромагнитного момента МЭМР.
Вследствие этого к ротору приложен такой же по величине электромагнитный момент МЭМР противоположного направления, стремящийся затормозить ротор. Под действием тормозного момента МЭМР частота вращения ротора будет снижаться и активная электрическая мощность, отдаваемая генератором нагрузке также уменьшится. Для поддержания частоты вращения ротора и отдаваемой активной мощности неизменными следует подвести к валу дополнительный вращающий механический момент ΔMВР для компенсации тормозного электромагнитного момента МЭМР.
Следовательно, увеличение активной электрической мощности генератора достигается увеличением подводимой к валу механической мощности.
Индуктивная нагрузка (ψ = π/2). Ток якоря İ отстает от ЭДС Ėf на π/2 и достигает максимума в фазе А на четверть периода позднее, чем при активной нагрузке (рис 3.2, б). За это время ротор повернется на половину полюсного деления (90 геометрических градусов в двухполюсной машине) относительно его положения на рис. 5.1.
МДС якоря Fa = Fad направлена по продольной оси d встречно МДС возбуждения Ff и ослабляет магнитное поле машины, не искажая его формы. Реакцию якоря называют продольной размагничивающей. На векторной диаграмме (рис. 3.2, б) ток якоря направлен по оси d, поэтому его называют продольным и обозначают Id.
Емкостная нагрузка (ψ = – π/2). Ток якоря İ опережает ЭДС Ėf на π/2 и достигает максимума в фазе А на четверть периода раньше, чем в случае активной нагрузки с углом ψ = 0.
Ротор при этом занимает положение, показанное на рис. 3.3, а. МДС якоря Fa = Fad действует по продольной оси d и совпадает с МДС возбуждения Ff, то есть усиливает магнитное поле машины, не искажая его. Такую реакцию якоря называют продольной намагничивающей.
Продольную реакцию якоря (ψ = ± π /2) образуют только реактивные токи якоря. При емкостной нагрузке под каждым полюсом находится одинаковое число проводников якоря с токами противоположных направлений (рис. 3.3, в). Аналогично распределение токов и в случае индуктивной нагрузки. Сумма электромагнитных сил fЭМ на рис. 3.3, в и образуемый этими силами электромагнитный момент МЭМ равны нулю.
 Следовательно, реактивный ток обмотки якоря и создаваемая им продольная МДС якоря не образуют электромагнитного момента и не оказывают механического действия на статор и ротор машины.
Следовательно, реактивный ток обмотки якоря и создаваемая им продольная МДС якоря не образуют электромагнитного момента и не оказывают механического действия на статор и ротор машины.
Образованные продольным и поперечным токам Id , Iq продольный и поперечный магнитные потоки якоря в зазоре и их первые гармонические зависят в основном от МДС якоря Faq, Fad и в меньшей мере от насыщения магнитопровода машины.
В общем случае нагрузка генераторов смешанная и угол ψ не равен 0 или ± π /2. МДС Fa на рис. 3.4 (активно-индуктивная нагрузка) не совпадает по направлению ни с одной из осей d и q машины.
Вследствие магнитной несимметрии ротора по осям d и q зазор в явнополюсных машинах неравномерен. Магнитное сопротивление RМ для потока якоря в зазоре Фа зависит в основном от зазора и меняется при изменении угла ψ. Поэтому поток якоря в зазоре Фа = Fa /RМ зависит как от МДС якоря Fa, так и от угла ψ.
От угла ψ зависит и распределение индукции в зазоре Вδа потока якоря Фа. Поэтому для определения потока якоря Фа и его первой гармонической Фа1, участвующей в преобразовании энергии, при разных нагрузках для каждого значения угла ψ необходимо рассчитывать магнитное поле якоря в зазоре, что является сложной задачей.
Для упрощения расчетов магнитного поля якоря в зазоре явнополюсных машин применяют метод двух реакций, предложенный французским электротехником Блонделем в 1895 году. Метод основан на предположении, что образованный продольным током якоря Id поток Фаd не влияет на образованный поперечным током якоря Iq поток Фаq, и наоборот.

Это справедливо если магнитопровод машин не насыщен (магнитная проницаемость стали μСТ = ∞). В связи с отсутствием точного теоретически обоснованного метода учета взаимовлияния продольного и поперечного потоков якоря, насыщение магнитопровода учитывают приближенно.
В соответствии с методом двух реакций основную (первую) гармони-ческую МДС якоря разлагают на составляющие по осям d и q: продольную
 , (3.4)
, (3.4)
размагничивающую или намагничивающую машину, и поперечную
 , (3.5)
, (3.5)
искажающую магнитное поле машины и оказывающую механическое действие на ротор машины.
Условно считают, что есть две составляющих тока якоря: продольный (реактивный) ток якоря Id = I sinψ, образующий МДС якоря Fad, и поперечный (активный) ток Iq = I cosψ, создающий МДС якоря Faq (рис. 5.4).
Разложение МДС якоря по методу Блонделя на две составляющие позволяет фиксировать максимумы МДС Fad на продольной оси машины, Faq – на поперечной. Конфигурация зазоров на пути поперечного Фаq и продольного Фаd потоков якоря постоянна и не зависит от угля ψ. Если магнитная цепь машины не насыщена (генератор работает на линейном участке х.х.х), то магнитные сопротивления RМd и RМq продольному и поперечному потокам якоря практически равны магнитным сопротивлениям зазоров по осям d и q, поэтому RМd и RМq постоянны. Тогда продольный Фаd = Fad /RМd и поперечный Фаq = Faq /RМq потоки коря линейно зависят только от МДС Fad и Faq , связанных с углом ψ простыми соотношениями (3.4), (3.5). При этом форма кривых индукции Bδad и Bδaq продольного и поперечного потоков якоря в зазоре не изменяется. 1
В этом случае достаточно один раз рассчитать картины продольного и поперечного магнитных полей якоря в зазоре и определить основные гармонические потоков Фаd1 и Фаq1 для каких либо значений МДС Fad и Faq, например равных единице. Значения потоков Фаd1 и Фаq1 для других значений МДС Fad и Faq можно определить пропорциональным пересчетом. Основную гармоническую магнитного потока взаимоиндукции якоря Фа1 можно найти геометрическим сложением составляющих:
 . (3.6)
. (3.6)
В неявнополюсных машинах с равномерным зазором основная гармоническая магнитного потока якоря Фа1 пропорциональна МДС якоря Fa и не зависит от угла ψ. Поэтому метод двух реакций теряет смысл и при анализе работы неявнополюсных машин его не применяют.
3.2. Приведение МДС якоря к обмотке возбуждения
При анализе работы синхронных машин возникает необходимость определения магнитных потоков и ЭДС, создаваемых совместным действием МДС возбуждения и якоря. Вследствие того, что обмотки возбуждения и якоря не одинаковы, форма МДС этих обмоток также различна, что затрудняет их сложение и определение результирующей МДС.
Для упрощения расчетов выполняют приведение МДС якоря к условиям обмотки возбуждения. Смысл приведения заключается в том, что синусоидальную МДС якоря заменяют эквивалентной МДС возбуждения при условии, что основная (первая) гармоническая магнитного поля якоря в зазоре не изменится.
В явнополюсных машинах ротор магнитно несимметричен (δ ≠ const) и МДС якоря приводят к обмотке возбуждения отдельно по осям d и q.
Продольная МДС якоря Fad f, приведенная к обмотке возбуждения,
 , (3.7)
, (3.7)
где kad – коэффициент реакции якоря по продольной оси (коэффициент приведения МДС якоря к МДС возбуждения по продольной оси); Fad f – продольная МДС якоря.
Поперечная МДС якоря Faq f, приведенная к обмотке возбуждения,
 , (3.8)
, (3.8)
где kaq – коэффициент реакции якоря по поперечной оси (коэффициент приведения МДС якоря к МДС возбуждения по поперечной оси). Faq f – продольная МДС якоря.
Для большинства явнополюсных машин коэффициенты приведения находятся в пределах kad = 0,82–0,87; kaq = 0,35–0,6. Более точно значения коэффициентов kad и kad в зависимости от соотношений размеров зазора и полюсного наконечника α = bР /τ; δm /δ; δ /τж.
В неявнополюсной машине зазор δ = const и отсутствует искажение формы магнитного поля якоря, обусловленное неравномерностью зазора, и нет необходимости в раздельном приведении МДС якоря по осям d и q. Кроме того форма МДС, образованных распределенными обмотками якоря и возбуждения, практически одинаковы при применяемых в реальных неявнополюсных машинах обмоточных данных.
МДС якоря Fa f , приведенная к обмотке возбуждения,
 , (3.9)
, (3.9)
где ka = 1/kf – коэффициент реакции якоря (коэффициент приведения МДС якоря к МДС возбуждения) зависит только от коэффициента формы поля возбуждения kf, определяемого по формуле (2.8); Fa f – МДС якоря. Обычно ka = 0,95–1,02.
3.3. Сопротивления обмотки якоря в
установившемся режиме (Тема 22)
Если пренебречь насыщением сердечников машины (μСТ = ∞), то можно условно считать, что МДС якоря Fa образует вращающийся синхронно с ротором магнитный поток якоря, не зависящий от МДС возбуждения.
Часть этого потока пересекает зазор, проходит по сердечнику ротора и сцеплена с обмотками возбуждения и якоря, обеспечивая магнитную связь обмоток. Эту часть потока называют потоком взаимоиндукции .
Часть потока якоря сцеплена только с обмоткой якоря (рис. 3.5) и называется потоком рассеяния обмотки якоря.
В неявнополюсной машине с равномерным зазором (δ = const) первая гармоническая МДС якоря с амплитудой Fa1m образует в зазоре синусоидальную волну индукции с амплитудой Bδa1m. Этой волне индукции соответствует поток взаимоиндукции Φа. Поток Φа велик вследствие того, что большую часть пути проходит по стальным сердечникам с малым магнитным сопротивлением.
Магнитный поток Φа вращается с частотой n1 = n и индуктирует в не-подвижной обмотке якоря ЭДС взаимоиндукции Еа, которую можно выразить через коэффициент пропорциональности ха (или хаd) и ток якоря I :
 , (3.10)
, (3.10)
где ха – индуктивное сопротивление взаимоиндукции обмотки якоря или
главное индуктивное сопротивление якоря (индуктивное сопротивление реакции якоря). Иногда ха обозначают как хаd (см. ниже).
В явнополюсной машине составляющие Φаd и Φаq вращающегося с частотой n1 = n потока взаимоиндукции индуктируют в неподвижной обмотке якоря ЭДС взаимоиндукции Еаd и Еаq. Эти ЭДС можно выразить через коэффициенты пропорциональности (индуктивные сопротивления) хаd, хаq и составляющие Id, Iq тока якоря:
 ; (3.11)
; (3.11)
 (3.12)
(3.12)
где хаd – индуктивное сопротивление взаимоиндукции обмотки якоря по продольной оси или главное индуктивное сопротивление якоря по продольной оси (индуктивное сопротивление реакции якоря по продольной оси); хаq – идуктивное сопротивление взаимоиндукции обмотки якоря по поперечной оси или главное индуктивное сопротивление якоря по поперечной оси (индуктивное сопротивление реакции якоря по поперечной оси).
 Сопротивления хаd и хаq различны. В явнополюсной машине магнитная система несимметрична, зазор между статором и ротором и магнитное сопротивление на пути продольного потока Φаd меньше, чем для поперечного потока Φаq. Поэтому при равных токах Id и Iq поток Φаd > Φаq и индуктирует в обмотке якоря ЭДС Еаd > Еаq. Следовательно, и хаd > хаq.
Сопротивления хаd и хаq различны. В явнополюсной машине магнитная система несимметрична, зазор между статором и ротором и магнитное сопротивление на пути продольного потока Φаd меньше, чем для поперечного потока Φаq. Поэтому при равных токах Id и Iq поток Φаd > Φаq и индуктирует в обмотке якоря ЭДС Еаd > Еаq. Следовательно, и хаd > хаq.
 Магнитное поле рассеяния якоря условно делят на три составляющих: пазового, лобового и дифференциального рассеяния (рис. 5.5).
Магнитное поле рассеяния якоря условно делят на три составляющих: пазового, лобового и дифференциального рассеяния (рис. 5.5).
Линии индукции BσП потока пазового рассеяния ФσП замыкаются вокруг проводника с током I поперек пазов и достаточно сильно насыщенных зубцов статора (рис. 3.5, а).
Линии индукции ВσЛ потока лобового рассеяния ФσЛ (рис. 5.5, б) за-мыкаются вокруг лобовых частей по воздуху (водороду).
Пространственный период τν замыкания образованных токами обмот-ки якоря в зазоре вращающихся волн высших гармонических индукции потока дифференциального рассеяния ФσД много меньше, чем у основной гармонической. На рис. 5.5, в показана тринадцатая гармоническая индукции В13(х) с τ13 « τ1. Зазор у синхронных машин большой и сравним по ве-личине с полюсным делением τν высших гармонических. Поэтому линии индукции Вδν потока ФσД замыкаются в основном в зазоре машины, частично проникая в поверхностные слои сердечника ротора (рис. 5.5, в). Пазы на роторе увеличивают магнитное сопротивление потоку ФσД.
Все составляющие потока рассеяния Фσ = ФσП + ФσЛ + ФσД обмотки якоря замыкаются в основном по воздуху, водороду и частично по сильно насыщенным участкам магнитопровода машины, то есть по путям с большим и практически постоянным магнитным сопротивлением. Поэтому поток рассеяния Фσ составляет меньшую часть потока якоря и пропорционален току якоря I. Поток Фσ изменяется с частотой f1 тока статора и индуктирует в фазе обмотки якоря ЭДС рассеяния
 , (3.13)
, (3.13)
Коэффициент пропорциональности xσ между током якоря I и ЭДС рассеяния Еσ якоря называют индуктивным сопротивлением рассеяния фазы обмотки якоря. Это сопротивление невелико (xσ « ха, хаd, хаq) и практически не зависит от насыщения машины. Вследствие того, что поток рассеяния замыкается в основном по немагнитной среде, сопротивление рассеяния xσ одинаково для продольного и поперечного токов якоря.
В отличие от сопротивления рассеяния xσ индуктивные сопротивления взаимоиндукции хаd и хаq зависят от насыщения стали магнитнопроводов статора и ротора, по которым замыкается поток взаимоиндукции.
Индуктивные сопротивления взаимоиндукции с учетом насыщения магнитопровода машины определяют приближенно делением ненасыщенного значения сопротивления на коэффициент насыщения:
 ;
;  ;
;  (3.14)
(3.14)
где kμ (kμ = kμd), kμd, kμq – коэффициенты насыщения по продольной и поперечной осям (см. параграф 3.2), определяемые по характеристикам намагничивания или х.х.х.
Вследствие меньшего влияния сопротивления хаq на большинство характеристик явнополюсного генератора часто принимают kμq = 1.
В реальной машине ток якоря образует общее магнитное поле якоря, деление которого на магнитные потоки взаимоиндукции и рассеяния условно. Поэтому вводят понятие индуктивных сопротивлений обмотки якоря продольному и поперечному токам якоря:
 ; (3.15)
; (3.15)
 . (3.16)
. (3.16)
Их называют: хd – синхронное индуктивное сопротивление якоря по продольной оси; хq – синхронное индуктивное сопротивление якоря по поперечной оси. Обычно хd > хq вследствие того, что хаd > хаq, а сопротивление рассеяния xσ одинаково для токов Id и Iq.
В неявнополюсных машинах индуктивное сопротивление якоря, соответствующее полному потоку якоря Фа + Фσ, обозначают хC (или хd ):
 (3.17)
(3.17)
и называют синхронным индуктивным сопротивлением якоря.
Синхронные индуктивные сопротивления с учетом насыщения маг-нитопровода машины хdН, хqН, хСН определяют по (3.15)–(3.17) при замене сопротивлений хаd, хаq, ха их насыщенными значениями хаdН, хаqН, хаН.
Значения индуктивных сопротивлений взаимоиндукции ха, хаd и хаq без учета насыщения магнитной цепи и сопротивления рассеяния определяют по формулам, приведенным в учебниках, книгах по проектированию электрических машин и справочниках. В справочниках обычно приводят ненасыщенные значения сопротивлений.
Активное сопротивление фазы обмотки якоря r зависит от материала и конструкции обмотки. Для уменьшения электрических потерь мощности обмотку якоря выполняют с малым активным сопротивлением в 10–1000 раз меньшим индуктивных. Вследствие этого активным сопротивлением якоря при определении токов, МДС, ЭДС и напряжений обмоток обычно пренебрегают, учитывая r при определении энергетических характеристик: мощностей, моментов, КПД.
Величины и соотношения сопротивлений обмотки якоря синхронных машин приведены в следующем параграфе.
3.4. Система относительных единиц
В теории синхронных машин сопротивления обмоток и все характеризующие работу машины физические величины принято выражать в относительных единицах (о.е.). В о.е. физическая величина определяется ее отношением к базисному или базовому значению этой же величины.
В качестве базисных тока и напряжения якоря принимают их номинальные фазные значения: U б = U НФ; I б = I НФ.
Базисное сопротивление находят через базисные ток и напряжение
 . (3.18)
. (3.18)
Базисную мощность принимают равной полной номинальной мощ-ности машины
 (3.19)
(3.19)
где m – число фаз обмотки якоря; РН – номинальная активная мощность; cosφН – номинальный коэффициент мощности машины.
Базисный момент машины определяют через базисную мощность
 , (3.20)
, (3.20)
где р – число пар полюсов; f1 – частота изменения напряжения якоря.
В качестве базисных тока Ι f б и МДС F f б возбуждения принимают ток и МДС возбуждения, соответствующие номинальному напряжению генератора по характеристике холостого хода (рис. 2.3),
 ;
; .(3.21)
.(3.21)
Для определения физической величины в о.е., необходимо эту величину разделить на базисную. Величины, выраженные в о.е., обознчают звездочками или подчеркиванием символа, обозначающего величину.
В относительных единицах:
напряжение обмотки якоря
 ; (3.22)
; (3.22)
ток обмотки якоря
 ; (3.23)
; (3.23)
полная, активная и реактивная мощности
 (3.24)
(3.24)
ток и МДС возбуждения
 (3.25)
(3.25)
 . (3.26)
. (3.26)
сопротивления фазы обмотки якоря
 (3.27)
(3.27)
Определим в относительных единицах: номинальные ток и напряжение обмотки якоря
I*Н = IНФ /I б = IНФ /IНФ = 1,0; U*Н = UНФ /U б = UНФ /UНФ = 1,0;
номинальные активную, реактивную и полную мощности
Р*Н = РН /Sб = РН /SН = cosφН; Q*Н = QН /Sб = QН /SН = sinφН;
S*Н = SН /Sб = SН /SН = 1,0.
Последние выражения интересны тем, что связывают номинальные мощности машины РН, QН, SН с коэффициентом мощности cosφН.
Ток и МДС возбуждения, соответствующие номинальному напряжению генератора в режиме холостого хода (см. рис. 2.3), в о.е.
I*f Х = If Х /If б = If Х /If Х = 1,0; F*f Х = Ff Х /Ff б = Ff Х /Ff Х = 1,0.
Из последних выражений очевидно, что МДС и ток возбуждения в о.е. равны по величине
 . (3.28)
. (3.28)
Величина сопротивлений обмотки якоря в о.е. находится в пределах: активное r* = r/Zб = 0,001–0,02; рассеяния x*σ = xσ /Zб = 0,08–0,3; синхронное неявнополюсных машин x*C = xC /Zб = 1,0–2,4 (3,0);
полюсных машин по продольной оси x*d = xd /Zб = 0,6–1,8 и по поперечной оси x*q = xq /Zб = 0,4–1,4.
Из приведенных выше значений в о.е. напряжений, токов, мощностей и сопротивлений обмотки якоря понятны преимущества применения относительных единиц. Независимо от мощности машины практически
все величины за исключением r* имеют один порядок, изменяясь в пределах от 0,1 до 3,0, что облегчает расчеты. Кроме того, при расчетах в о.е. можно использовать “нормальные” х.х.х. если не известна действительная х.х.х. машины (см. гл. 4).
Практически все соотношения, записанные в о.е., справедливы и для именованных величин. Поэтому далее звездочки, обозначающие о.е., в большинстве случаев опускаем.
3.5. Векторные диаграммы синхронных генераторов
3.5.1. Уравнения, диаграмма напряжений и МДС
неявнополюсного генератора без учета насыщения машины (Тема 22)
В ненасыщенной машине (магнитная проницаемость стальных участков магнитной цепи μСТ = ∞) магнитное сопротивление потоку взаимоиндукции обусловлено только зазором между статором и ротором. В этом случае х.х.х. или основная характеристика намагничивания представляют собой прямую линию, которая является продолжением начального участка соответствующей характеристики (рис. 2.3). Поэтому зависимость между током, МДС и магнитным потоком любой обмотки линейна.
Вследствие линейности магнитной цепи машины условно считают, что магнитное поле взаимоиндукции обмотки якоря не оказывает влияния на поле взаимоиндукции возбуждения и наоборот. В этом случае используют принцип наложения и определяют результирующее магнитное поле машины как сумму магнитных полей от токов якоря и возбуждения.
Ток If и МДС Ff обмотки возбуждения образуют магнитный поток взаимоиндукции Фf , ток I и МДС Fa обмотки якоря – магнитные потоки взаимоиндукции Фa и рассеяния Фσ. Эти потоки индуктируют в обмотке якоря ЭДС взаимоиндукции Ef, Ea и рассеяния Eσ. Напряжение фазы обмотки якоря равно сумме индуктированных ЭДС за вычетом падения напряжения на активном сопротивлении обмотки
 . (3.29)
. (3.29)
ЭДС Ea и Eσ выразим через ток якоря I и соответствующие индуктивные сопротивления xa и xσ. Тогда напряжение обмотки якоря можно считать разностью между ЭДС холостого хода Ef, индуктированной потоком возбуждения, и падениями напряжения на сопротивлениях обмотки
 . (3.30
. (3.30
)
Перепишем уравнение (5.30) в виде более соответствующем физическим процессам в реальной машине
 (3.31)
(3.31)
 , (3.32)
, (3.32)
где Er – ЭДС якоря, индуктируемая результирующим магнитным полем в зазоре машины. Эта ЭДС обеспечивает заданное напряжение машины с учетом падения напряжения на сопротивлениях r и xσ. Реакция якоря, изменяющая магнитное поле машины от потока возбуждения Фf при холостом ходе до результирующего магнитного потока взаимоиндукции при нагрузке Фr, учтена в (5.32) падением напряжения jxaİ.
Уравнение МДС
 , (3.33)
, (3.33)
где Fr – результирующая МДС машины, возникает при взаимодействии МДС возбуждения Ff и якоря Faf. МДС Fr создает результирующее магнитное поле машины. Оно индуктирует в обмотке якоря ЭДС Er .
Построение векторной диаграммы рассмотрим на примере наиболее часто решаемой задачи определения МДС возбуждения Ff , обеспечивающей работу машины с заданными напряжением U, током I и коэффициентом мощности cosφ. Нагрузка генератора активно-индуктивная. Известны также сопротивления якоря r, xσ, xa.
 Из точки 0 (рис. 3.6, а) проводим вертикально в выбранном масштабе вектор напряжения U (на диаграмме напряжение равно номинальному).
Из точки 0 (рис. 3.6, а) проводим вертикально в выбранном масштабе вектор напряжения U (на диаграмме напряжение равно номинальному).
Под углом φ, определяемым нагрузкой генератора, проводим векторы тока якоря İ и приведенной МДС якоря Faf . Угол φ принято считать положительным, если ток якоря отстает от напряжения и отрицательным, если ток опережает напряжение. МДС Faf можно определить двумя способами. Если известны размеры активных частей машины и обмоточные данные то по формулам (2.8), (3.1), (3.9) определяют коэффициент приведения ka, амплитуду основной гармонической МДС якоря Fa1m и приведенную МДС якоря Faf . Чаще известны ненасыщенное сопротивление xa и х.х.х. В этом случае следует на оси ординат Ef х.х.х. в масштабе напряжения отмерить отрезок Ea = xaI (рис. 5.6, б), провести линию Ea = const
до пересечения со спрямленной х.х.х. (μСТ = ∞) и найти Faf .
Графически решим уравнение (3.31), для чего из конца вектора напряжения U чертим параллельно вектору тока İ вектор падения напряжения на активном сопротивлении обмотки якоря rİ (изображен увеличенным в 10–20 раз) и перпендикулярно вектору тока İ – вектор jxσİ. Отрезок 0А равен ЭДС якоря Er, индуктируемой результирующим магнитным полем взаимоиндукции машины.
Из точки 0 проводим вектор результирующей МДС Fr, опережающий ЭДС Ėr на четверть периода или угол p /2. Для определения величины МДС Fr на оси Ef х.х.х. откладывают ЭДС Er и проводят линию Er = const до пересечения с линеаризованной х.х.х. (прямая 0K на рис. 3.6, б). Опустив перпендикуляр на ось МДС, найдем результирующую МДС Fr.
МДС возбуждения Ff определим графически из уравнения (333):
 . (5.34)
. (5.34)
 Для этого из конца вектора Fr проводим вектор приведенной МДС якоря – Faf (рис. 5.6, а). Отрезок 0С равен МДС обмотки возбуждения Ff
Для этого из конца вектора Fr проводим вектор приведенной МДС якоря – Faf (рис. 5.6, а). Отрезок 0С равен МДС обмотки возбуждения Ff
Для решения задачи определения МДС возбуждения Ff по заданному режиму генератора достаточно двух уравнений (3.31) и (3.33). Причина этого в том, что уравнения (3.32) и (3.33) учитывают одно и то же физическое явление – действие МДС якоря на магнитное поле машины.
Дочертим часть диаграммы, соответствующую уравнению (3.32). Для этого из конца вектора Ėr проводим перпендикулярно вектору тока İ век- тор падения напряжения jxaİ. Отрезок 0В равен ЭДС холостого хода Еf, индуктируемой в обмотке якоря потоком возбуждения Фf.
В ненасыщенной машине (μСТ = ∞) МДС возбуждения Ff можно определить, не пользуясь уравнениями (3.31)–(3.33), по уравнению (5.30), переписав его в следующем виде:
 . (3.35)
. (3.35)
 Графически решая это уравнения (рис. 3.6, а) определяют ЭДС Еf . Далее по ЭДС Еf и спрямленной х.х.х. находят МДС Ff (рис. 5.6, б).
Графически решая это уравнения (рис. 3.6, а) определяют ЭДС Еf . Далее по ЭДС Еf и спрямленной х.х.х. находят МДС Ff (рис. 5.6, б).
При отстающем токе якоря (φ > 0, активно-индуктивная нагрузка) МДС якоря Fа f на рис. 5.6, а ослабляет магнитное поле, поэтому с увеличением нагрузки необходимо увеличивать ток If и МДС Ff возбуждения для поддержания выходного напряжения генератора U постоянным.
Если в выражении (5.35) учесть, что xa + xσ = xC, то уравнение напряжений неявнополюсного ненасыщенного генератора принимает вид:
 . (3.36)
. (3.36)
По этому выражению можно начертить упрощенную диаграмму напряжений неявно-полюсного генератора (рис. 3.7) без учета насыщения магнитопровода машины.
3.5.2. Уравнения, диаграмма напряжений и МДС
неявнополюсного генератора c учетом насыщения машины
В реальной машине вследствие насыщения активной стали (μСТ ≠ ∞) зависимость между МДС и магнитным потоком взаимоиндукции, создаваемыми током какой либо обмотки, нелинейна и определяется основной характеристикой намагничивания и х.х.х. машины. Поэтому индуктивное сопротивление взаимоиндукции xa = Ea /I ≡ Фa /I изменяется нелинейно c изменением тока нагрузки I. Равенства (5.32), (5.35) теряют свою силу, так как входящая в них ЭДС Ėa = – jxaİ нелинейно зависит от МДС Fa или тока I якоря из-за изменения xa с насыщением стали (рис. 3.8).
Уравнение (3.31) остается справедливым, поскольку сопротивления r и xσ якоря практически не зависят от насыщения. Верны также равенства (3.33) и (3.34), так как МДС Fa и Ff не зависят от насыщения, а определяются только конструкцией и токами обмотки.
 На рис. 3.8 изображена диаграмма напряжений и МДС неявнополюсного генератора с учетом насыщения машины. Для определения МДС возбуждения Ff заданы напряжение U, ток I, коэффициент мощности cosφН, нагрузка активно-индуктивная. Известна х.х.х. и параметры обмотки якоря r, xσ. Величины U, I, cosφН, r, xσ и х.х.х. приняты такими же, как и при построении диаграммы на рис. 3.8. Порядок построения диаграммы такой же, как и на рис. 3.6. ЭДС Er определена графически из уравнения (3.31).
На рис. 3.8 изображена диаграмма напряжений и МДС неявнополюсного генератора с учетом насыщения машины. Для определения МДС возбуждения Ff заданы напряжение U, ток I, коэффициент мощности cosφН, нагрузка активно-индуктивная. Известна х.х.х. и параметры обмотки якоря r, xσ. Величины U, I, cosφН, r, xσ и х.х.х. приняты такими же, как и при построении диаграммы на рис. 3.8. Порядок построения диаграммы такой же, как и на рис. 3.6. ЭДС Er определена графически из уравнения (3.31).
На оси ординат Ef х.х.х. следует отмерить от точки 0 отрезок, равный ЭДС Er в выбранном масштабе, и провести прямую Er = сonst до пересечения с х.х.х. Проектируя точку пересечения на ось абсцисс, найдем результирующую МДС Fr (рис. 3.8).
Перпендикулярно вектору Ėr с опережением на π/2 чертим вектор Fr . Из сравнения треугольников МДС видно, что пренебрежение насыщением магнитопровода машины приводит к значительной погрешности при определении МДС возбуждения Ff . Приведенная к обмотке возбуждения МДС якоря Fа f определяется также как и для ненасыщенного генератора. МДС возбуждения Ff , обеспечивающую заданный режим генератора, определим, решив графически уравнение (3.34).
По МДС Ff и х.х.х. (см. рис. 3.8) найдем ЭДС Ef , которая индуктировалась бы в обмотке якоря при холостом ходе магнитным потоком взаимоиндукции Фf, образованным МДС возбуждения Ff . Вектор ЭДС Ėf (показан на диаграмме штрихпунктирной линией) отстает от векторов потока Фf и МДС Ff на π/2.
На рис. 3.8 пунктирными линиями изображены треугольник МДС и векторы jxaİ и Ėf , соответствующие ненасыщенной машине.
Совмещенные диаграммы напряжений и МДС называют “диаграммой Потье” по фамилии предложившего их человека.
В режимах работы с активно-индуктивной и индуктивной нагрузками (φ > 0) при определении МДС возбуждения Ff по х.х.х. возникает погрешность, возрастающая с увеличением угла φ.
 Причина этого в том, что х.х.х. определена при токе якоря I = 0 и для получения, например номинального напряжения UН достаточно МДС возбуждения Ff Х (рис. 3.8). При нагрузке из-за размагничивающего действия МДС якоря для получения того же напряжения необходимо увеличить ток возбуждения и МДС возбуждения будет больше, чем при холостом ходе Ff > Ff Х. Поток рассеяния ротора Фf σ ≡ Ff и полный поток ротора Ф2 также возрастут, что увеличит насыщение ярма и зубцов ротора и их магнитные сопротивления RМа2 и RМZ2.
Причина этого в том, что х.х.х. определена при токе якоря I = 0 и для получения, например номинального напряжения UН достаточно МДС возбуждения Ff Х (рис. 3.8). При нагрузке из-за размагничивающего действия МДС якоря для получения того же напряжения необходимо увеличить ток возбуждения и МДС возбуждения будет больше, чем при холостом ходе Ff > Ff Х. Поток рассеяния ротора Фf σ ≡ Ff и полный поток ротора Ф2 также возрастут, что увеличит насыщение ярма и зубцов ротора и их магнитные сопротивления RМа2 и RМZ2.
Положение треугольника МДС 0аb на диаграмме (рис. 3.9) противоположно показанному на рис. 3.8. Вектор результирующей МДС Fr (отрезок 0b) обычно совмещают с осью абсцисс, то есть проводят по отношению к вектору ЭДС Ėr под углом π/2 + γ, а не под углом π/2 как на рис. 3.8. Поэтому вектор МДС якоря F*а f (отрезок ba) также проводят под углом φ + γ к вертикали (оси ординат). Остальное понятно из рис. 3.9.
По диаграмме Потье можно определить изменение напряжения при отключении нагрузки и неизменном токе возбуждения:
 , (3.38)
, (3.38)
где все обозначения по рис. 3.9.
Диаграмму Потье иногда применяют и для расчетов явнополюсных машин. В этом случае принимают приведенную МДС якоря
 , (3.39)
, (3.39)
где Fa – МДС якоря по формуле (3.1); kad – коэффициент приведения по продольной оси.
Наиболее оправдано применение диаграммы Потье для явнополюсных генераторов в режимах работы с отстающим углом φ > 0 и cosφ ≤ 0,8 (активно-индуктивная и индуктивная нагрузки), так как при этом погрешность невелика и не превышает 5–10 %.
3.5.3. Уравнения, диаграмма напряжений и МДС
явнополюсного генератора без учета насыщения машины
В соответствии с принципом наложения, справедливым для ненасыщенной явнополюсной машины, условно считают, что ток If и МДС Ff возбуждения образуют магнитный поток взаимоиндукции Фf. Ток I и МДС Fа якоря образуют поток рассеяния якоря Фσ. Продольные и поперечные составляющие тока Id, Iq и МДС Fad, Faq якоря образуют магнитные по- токи взаимоиндукции якоря Фad, Фaq . Условно считают, что потоки Фf, Фσ, Фad, Фaq не оказывают взаимного влияния и индуктируют в обмотке якоря ЭДС Ef , Eσ , Ead, Eaq.
Напряжение фазы обмотки якоря
 . (3.40)
. (3.40)
Выразив ЭДС Eσ , Ead, Eaq через соответствующие токи и индуктивные сопротивления обмотки якоря, получим
 . (3.41)
. (3.41)
Первые три члена в правой части равенства (3.41) по аналогии с неявнополюсной машиной можно назвать результирующей ЭДС якоря
 (3.42)
(3.42)
После введения результирующей ЭДС якоря Er уравнение (3.41)
можно записать в следующем виде:
 . (3.43)
. (3.43)
ЭДС Er индуктируется результирующим магнитным потоком взаимоиндукции в зазоре машины
 , (3.44)
, (3.44)
который образуется результирующей МДС машины
 (3.45)
(3.45)
Диаграмма напряжений и МДС ненасыщенного явнополюсного генератора (диаграмма Блонделя) для определения МДС возбуждения при заданной активно-индуктивной нагрузке изображена на рис. 3.10.
Для вычерчивания векторной диаграммы должны быть заданы: напряжение U и ток I якоря, коэффициент мощности cosφ, угол ψ между векторами ЭДС холостого хода Ėf (поперечной осью q) и тока İ обмотки якоря, сопротивления обмотки якоря r, xσ , xad, xaq.
Из точки 0 проводим вектор напряжения U, под углом φ к нему – векторы тока İ и МДС Fa обмотки якоря.
Под углом ψ к вектору İ проводим ось q, перпендикулярно оси q – ось d. В соответствии с методом двух реакций чертим векторы токов İd, İq и приведенных к обмотке возбуждения МДС Fad f, Faq f якоря, модуль которых можно определить, как и для неявнополюсного генератора, двумя способами.
При известных размерах зазора и данных обмоток определяют расчётным путём продольную и поперечную МДС Fad, Faq; коэффициенты реакции якоря kad, kaq и далее по формулам (3.7), (3.8) МДС якоря Fad f, Faq f .
Более просто определяют МДС Fad f и Faq f по рассчитанным ЭДС взаимоиндукции Ėad = – jxad İd и Ėaq = – jxaq İq и продолжению линейной части (спрямленной) х.х.х. аналогично определению Fa f по ЭДС Еa на рис. 3.6 для неявнополюсного генератора.
Прибавив к вектору напряжения U падение напряжения на сопротивлении рассеяния обмотки якоря jxσİ, решим графически уравнение (3.42) и найдем ЭДС Еr . Вследствие малости активного сопротивления r обмотки якоря в (3.42) пренебрегаем падением напряжения rİ.
 По найденной ЭДС Еr и спрямленной х.х.х. определим результирующую МДС Fr также как и для неявнополюсного генератора (рис. 3.6).
По найденной ЭДС Еr и спрямленной х.х.х. определим результирующую МДС Fr также как и для неявнополюсного генератора (рис. 3.6).
Диаграммы МДС или потоков чертят по уравнениям (3.44), (3.45).
 Проводим из точки O вектор результирующей МДС Fr, опережающей ЭДС Ėr на π/2.
Проводим из точки O вектор результирующей МДС Fr, опережающей ЭДС Ėr на π/2.
Преобразуем уравнение (3.45)
 .
.
Для решения этого уравнения из конца вектора Fr, проводим векторы приведенных продольной и поперечной МДС якоря Fad f, Faq f .
Как и в неянополюных машинах определение МДС возбуждения Ff без учета насыщения стали возможно по двум уравнениям (3.42), (3.45).
МДС возбуждения ненасыщенной машины можно найти и без диаграммы МДС. Достаточно начертить диаграмму напряжений по (3.41) или (3.42), (3.43) и найти из нее ЭДС Еf . Далее по найденной ЭДС Еf и спрямленной х.х.х. определить МДС Ff (см. рис. 3.6).
Обычно угол ψ неизвестен, тогда положение осей d и q определяют графически. Через точки А и В (рис. 3.10) проведем прямую до пересечения с вектором Ėf в точке С. Угол СВD равен ψ. Из треугольника ВСD прямая
 .
.
Отрезок АВ = xσI. Тогда
 .
.
Следовательно, для определения направления оси q достаточно из конца вектора U (обычно r принимают равным 0) начертить перпендикулярно вектору İ отрезок АС = xqI и провести ось q через точки О и С.
На диаграмме (рис. 3.10) показан вектор ЭДС Ėrd , индуктированной результирующим продольным потоком взаимоиндукции Фrd. Поток Фrd образован результирующей продольной МДС Frd, опережающей вектор ЭДС Ėrd на π/2. Выразим векторы МДС Frd и ЭДС Ėrd из диаграммы
 ;
; (3.46)
(3.46)
МДС Frd, соответствующая ЭДС Еrd, определяет поток взаимоиндукции Фrd в сердечнике ротора и насыщение ротора. МДС Fr и ЭДС Еr ха-рактеризуют магнитное состояние сердечника статора, обусловленное потоком Фrd с учетом насыщения зубцов поперечным потоком якоря Фaq.
Используя соотношения (3.46), уравнения ненасыщенного явнополюного генератора (3.42), (3.43), (3.45) можно записать в виде:
 ; (3.47)
; (3.47)
 . (3.48) (3.48)
. (3.48) (3.48)
 (3.49)
(3.49)
Уравнение (3.41) можно упростить, принимая r = 0 и разлагая падение напряжения на сопротивлении рассеяния на две составляющих:
 .
.
Сгруппировав коэффициенты при продольных и поперечных токах якоря, и учитывая соотношения (315, 3.16), получим
 . (3.50)
. (3.50)
Упрощенная диаграмма напряжений по (3.50) приведена на рис. 5.5.
.
Отрезок АВ = xσI. Тогда
.
Следовательно, для определения направления оси q достаточно из конца вектора U (обычно r принимают равным 0) начертить перпендикулярно вектору İ отрезок АС = xqI и провести ось q через точки О и С.
На диаграмме (рис. 3.10) показан вектор ЭДС Ėrd , индуктированной результирующим продольным потоком взаимоиндукции Фrd. Поток Фrd образован результирующей продольной МДС Frd, опережающей вектор ЭДС Ėrd на π/2. Выразим векторы МДС Frd и ЭДС Ėrd из диаграммы
 ;
;  (3.46)
(3.46)
МДС Frd, соответствующая ЭДС Еrd, определяет поток взаимоиндукции Фrd в сердечнике ротора и насыщение ротора. МДС Fr и ЭДС Еr ха- рактеризуют магнитное состояние сердечника статора, обусловленное потоком Фrd с учетом насыщения зубцов поперечным потоком якоря Фaq.
Используя соотношения (3.46), уравнения ненасыщенного явнополюного генератора (3.42), (3.43), (3.45) можно записать в виде:
 ; (3.47)
; (3.47)
 . (3.48)
. (3.48)
 . (3.49)
. (3.49)
Уравнение (3.41) можно упростить, принимая r = 0 и разлагая падение напряжения на сопротивлении рассеяния на две составляющих:
.
Сгруппировав коэффициенты при продольных и поперечных токах якоря, и учитывая соотношения (3.15, 3.16), получим
 . (3.50)
. (3.50)
Влияние насыщения магнитопровода на характеристики явнополюсных генераторов при работе на активно-индуктивную нагрузку с cosφ ≤ 0,8, можно с достаточной для практики точностью приближенно учесть с помощью диаграммы Потье (см. пункт 3.5.2).
Более точные методы учета насыщения магнитопровода машины, рассмотрены в пособиях по проектированию /1, 12, 24/. Для использования этих методов нужно знать размеры и обмоточные данные машины.
Кроме определения МДС Ff при нагрузке и изменения напряжения DU при сбросе нагрузки, при помощи векторных диаграмм можно графически рассчитать все характеристики синхронного генератора.
3.6. Характеристики синхронных генераторов
при работе на автономную нагрузку (Тема 23)
Характеристиками называют зависимости между основными величинами: напряжением U, током I якоря и током возбуждения If в установившемся режиме работы генератора при постоянных частоте вращения ротора n ( f1= сonst) и коэффициенте мощности сosφ. Характеристики определяют в результате расчетов с помощью векторных диаграмм или испытаний генератора. Примерная схема испытаний изображена на рис. 3.11.
 По опытным характеристикам можно найти некоторые параметры (сопротивления) обмотки якоря и величины, необходимые для построения векторных диаграмм и определения других характеристик.
По опытным характеристикам можно найти некоторые параметры (сопротивления) обмотки якоря и величины, необходимые для построения векторных диаграмм и определения других характеристик.
При работе генератора на автономную нагрузку различают следующие характеристики: холостого хода, короткого замыкания, внешние, регулировочные и нагрузочные. Описание опыта холостого хода и опытной х.х.х. приведено в главе 2.
3.6.1. Характеристика короткого замыкания.
Реактивный треугольник. Отношение короткого
замыкания (ОКЗ)
Характеристика короткого замыкания – это зависимость установившегося тока короткого замыкания IК обмотки якоря от тока возбуждения I f при постоянных частоте вращения n = сonst и напряжении обмотки якоря U = 0.
Для экспериментального определения характеристики трехфазного короткого замыкания ( х.к.з.) замыкают накоротко выводы U, V, W обмоток всех трех фаз якоря генератора (ZН = 0). Ротор машины приводят во вращение с номинальной частотой nН = n1 и, увеличивая ток возбуждения, снимают зависимость IК = f ( If ). Х.к.з. (рис. 3.12) практически линейна даже при токах короткого замыкания IК = (3–4) IН. Поэтому обычно увеличивают I f до тех пор, пока IК не будет равен номинальному, и х.к.з. проводят через две точки: начало координат и IК = IН.
В большинстве машин средней и большой мощности сопротивление обмотки якоря практически индуктивное, так как активное сопротивление r пренебрежимо мало. Ток короткого замыкания İК отстает от ЭДС холостого хода Ėf на четверть периода и будет чисто реактивным, продольным, IК = Id, Iq = 0 (рис. 3.12). Ток якоря IК образует продольную МДС Fad f, которая действует встречно МДС возбуждения Ff и сильно размагничивает машину. Сталь машины не насыщена и при Iq = 0 уравнения (3.31)–(3.33), (3.42)–(3.45) явно- и неявнополюсных машин одинаковы:
машину. Сталь машины не насыщена и при Iq = 0 уравнения (3.31)–(3.33), (3.42)–(3.45) явно- и неявнополюсных машин одинаковы:
 ; (3.51)
; (3.51)
 ; (3.52)
; (3.52)
 , (3.53)
, (3.53)
где для неявнополюсных машины xad = xa и Fad f = Fa f .
Векторная диаграмма по (3.51)–(3.53) в о.е. приведена на рис. 3.12.
Вследствие постоянства сопротивления рассеяния (xσ = const) определяемый из (3.51) ток короткого замыкания
 (3.54)
(3.54)
зависит только от характера изменения ЭДС Еr .
Из-за сильного размагничивающего действия продольной МДС якоря Fad f , результирующие МДС Fr и соответствующий ей поток Фr , невелики. Магнитопровод машины не насыщен, и генератор работает на линейной части х.х.х.
Результирующая ЭДС якоря Еr (отрезок ОА) линейно зависит от тока возбуждения. Поэтому х.к.з. IК = f ( Ff ) линейна.
Входящие в формулу (3.54) ЭДС Еr = 4,44 w f1Фr kO1 ≡ n1Фr и сопротивление xσ = 2π f1Lσ ≡ n1Lσ линейно зависят от частоты вращения. Учитывая, что индуктивность рассеяния обмотки якоря Lσ = сonst,

.
Поэтому ток короткого замыкания практически не зависит от частоты вращения ротора n при значениях n ³ (0,1–0,2) nН.
Определение ненасыщенного продольного синхронного сопротивления
Подставляя выражение (3.51) в (3.52), получим:
 , (3.55)
, (3.55)
то есть условно можно считать, что индуктированная потоком возбуждения ЭДС холостого хода Еf уравновешена падением напряжения на синхронном индуктивном сопротивлении xd или xC в неявнополюсной машине (векторы Ė*f , jx* ad İК и jx* d İК показаны на векторной диаграмме рис. 3.12 пунктирными линиями).
Тогда из формулы (3.55)
 , (3.56)
, (3.56)
что позволяет определять ненасыщенное продольное синхронное сопротивление по результатам опытов холостого хода и короткого замыкания.
На одном рисунке (рис. 3.12) совмещают х.х.х. и х.к.з. Для любого значения тока короткого замыкания I*К по х.к.з. определяют МДС возбуждения F*f (точка С). Так как магнитная цепь машины в режиме короткого замыкания не насыщена ЭДС Е*f = Е /*f , соответствующую МДС F*f , определяют по продолжению линейной части х.х.х. Ненасыщенное синхронное индуктивное сопротивление обмотки якоря по продольной оси рассчитывают по (5.56), подставляя соответствующие значения I*К и Е*f = Е /*f .
Определение МДС якоря, приведенной к обмотке возбуждения
Если известно индуктивное сопротивление рассеяния xσ , по х.х.х. и х.к.з. можно найти приведенные к обмотке возбуждения МДС Fa f или Fad f якоря. На рис. 3.13 приведены соответствующие построения в о.е. при токе короткого замыкания, равном номинальному I*К = I*Н = 1,0.
 Проводят линию I*К = const до пересечения с х.к.з. в точке K, проекция которой на ось F*f (точка С) определяет МДС возбуждения F*f при токе I*К.
Проводят линию I*К = const до пересечения с х.к.з. в точке K, проекция которой на ось F*f (точка С) определяет МДС возбуждения F*f при токе I*К.
На оси ординат от точки 0 откладывают в масштабе напряжения отрезок 0E, равный ЭДС рассеяния якоря Е*r = x*σ IК (или падению напряжения на сопротивлении рассеяния x*σ IК). Проводят линию Е*r = const до пересечения с х.х.х. в точке А. Проектируя точку А на ось МДС F * f , получают точку В.
Треугольник АВС называют реактивным треугольником, или треугольником короткого замыкания. Катет АВ треугольника АВС равен ЭДС рассеяния или падению напряжения на сопротивлении рассеяния x* σ I*К, катет ВС – приведенной к обмотке возбуждения продольной МДС якоря F*ad f . Отрезок ОВ определяет результирующую МДС машины F*r.
Приведенную к обмотке возбуждения продольную МДС якоря F*adf можно определить по формуле:
 . (3.57)
. (3.57)
С помощью реактивного треугольника и х.х.х. можно определить индукционную нагрузочную характеристику машины.
Свойства синхронного генератора в известной мере характеризует отношение короткого замыкания (ОКЗ). ОКЗ – это ток установившегося короткого замыкания в о.е. при токе возбуждения I*f Х = 1, соответствующем номинальному напряжению в режиме холостого хода,
 . (3.58)
. (3.58)
В выражении (3.58) ЭДС Е*f определяют при I*f Х = F*f Х = 1 в точке М на продолжении линейной части х.х.х. (линия 0L на рис. 3.13). Для нормальных х.х.х. с координатами второй точки (0,5; 0,53) у явнополюсных, и – (0,5; 0,58) у неявнополюсных машин (см. табл. 2.1) ЭДС Е*f Х при токе I*f Х = F*f Х = 1,0 равна соответственно 1,06 и 1,16. Этим объяснимо появление коэффициентов 1,06–1,16 в числителе правой части формулы (3.58).
По известному значению ОКЗ можно начертить характеристику трехфазного короткого замыкания (х.к.з.). Х.к.з. прямолинейна и проходит через две точки (см. рис. 3.13): начало кооринат и точку D с координатами (F*f Х = 1,0; ОКЗ).
ОКЗ в основном зависит от зазора машины. С увеличением зазора δ продольное синхронное сопротивление xd ≡ 1/δ уменьшается, что влечет за собой увеличение ОКЗ. При этом ослабевает влияние МДС якоря на магнитное поле машины, а напряжение обмотки якоря при изменении нагрузки меняется меньше и генератор работает более устойчиво.
Неоправданное повышение ОКЗ увеличивает габариты и стоимость машины, поскольку с увеличением зазора требуется более мощная обмотка возбуждения, и больше расход обмоточных и магнитных материалов.
Величина продольных синхронных сопротивлений x*d или x*С большинства синхронных генераторов составляет 0,6–2,4 о.е. и ток установившегося короткого замыкания при I f = I f Х по (3.58)
I*К = ОКЗ = 0,42–2,0,
то есть относительно невелик и сравним по величине с номинальным током. Физически это объяснимо сильной размагничивающей реакцией якоря в режиме короткого замыкания, вследствие чего индуктируемая в обмотке якоря ЭДС Еr мала даже при значительных токах возбуждения.
Установившийся ток трехфазного короткого замыкания при токе возбуждения, соответствующем номинальной нагрузке,
 , (3.59)
, (3.59)
 где F*f Н – МДС возбуждения, обеспечивающая номинальный режим работы генератора.
где F*f Н – МДС возбуждения, обеспечивающая номинальный режим работы генератора.
При соединении выводов двух фаз обмотки якоря, например U и V (рис. 3.11), между собой возникает двухфазное короткое замыкание. При соединении одного из выводов U, V, W обмотки якоря с нулевой точкой звезды N (рис. 3.11) возникает однофазное короткое замыкание.
Токи I* К2 и I* К1 двух- и однофазного коротких замыканий больше тока I* К3 = I* К трехфазного короткого замыкания при одинаковом токе возбуждения I*f = F*f (рис.3.14).
Двухфазное короткое замыкание это несимметричный режим и ток двухфазного короткого замыкания İ* К2 можно представить в виде суммы токов прямой İ* 1 и обратной İ* 2 последовательностей:
 .
.
Вращающаяся синхронно с ротором МДС якоря образуется только токами прямой последовательности İ*1. Эта МДС меньше размагничивает машину, чем при трехфазном коротком замыкании, поскольку составляет только часть от полной МДС якоря. Поэтому результирующий магнитный поток машины, а также индуктированная этим потоком ЭДС и обусловленный ею ток двухфазного короткого замыкания İ* К2 будут больше, чем при трехфазном коротком замыкании.
Размагничивающая реакция якоря в случае однофазного короткого замыкания еще меньше, так как МДС якоря образована только одной фазой обмотки, и ток однофазного короткого замыкания больше тока двухфазного İ* 1 > İ* 2 (рис. 3.14).
3.6.3. Внешние характеристики
Внешней характеристикой называют зависимость напряжения обмот-ки якоря от тока якоря U = f ( I ) при постоянных токе возбуждения I f, частоте вращения n и коэффициенте мощности cosφ.
Для опытного определения внешних характеристик приводят ротор генератора во вращение (обычно с номинальной частотой nН) при отключенном сопротивлении нагрузки ZН (рис. 3.11) и увеличивают ток возбуждения до значения I fХ, обеспечивающего номинальное напряжение UН при холостом ходе. Далее включают в обмотку якоря сопротивление нагрузки ZН и постепенно нагружают машину до номинального тока IН. Коэффициент мощности поддерживают постоянным, регулируя сопротивление нагрузки. Фиксируют показания приборов, измеряющих напряжение и ток якоря. Все характеристики (рис. 3.15, а) выходят на холостом ходу из одной точки U* = U*Н = 1,0 (Z*Н = ∞, I* = 0) и приходят в точку, соответствующую току короткого замыкания I*К (Z*Н = 0, U* = 0).
Возможен другой способ определения внешних характеристик. Нагружают генератор до U* = U*Н = 1,0; I* = I*Н = 1,0 при заданном коэффициенте мощности сosφ. Уменьшают нагрузку машины, сохраняя постоянными ток возбуждения I f1, коэффициент мощности сosφ и частоту вращения n. В этом случае все характеристики (рис. 3.15, б) проходят через одну точку U* = U*Н = 1,0; I* = I*Н = 1,0. Напряжения U* холостого хода (Z*Н = ∞, I* = 0) и токи I*К короткого замыкания (Z*Н = 0, U* = 0) различны.
Причины изменения напряжения генератора выясним на примере неявнополюсной машины. Уравнения (3.31), (3.33) можно записать относительно напряжения генератора
 , (3.60)
, (3.60)
 . (3.61)
. (3.61)
Из (3.60), (3.61) следует, что напряжение меняется под действием МДС якоря Faf и падения напряжения на сопротивлениях обмотки якоря.
Для объяснения вида внешних характеристик используем векторные диаграммы (рис. 3.16) неявнополюсного генератора с сопротивлениями обмотки якоря x*d = 1,54; х*σ = 0,13 и номинальным коэффициентом мощности cosφН = 0,8 (отстающим), активным сопротивлением якоря пренебрегаем (r* = 0); х.х.х. генератора приведена на рис. 3.11. Все диаграммы начерчены при номинальном напряжении, на рис. 3.16, а, б, в при номинальном токе.
При активной нагрузке (рис. 3.16, а) угол между векторами напряжения U и тока İ якоря φ = 0, а коэффициент мощности сosφ = 1,0.
Напряжение и ток якоря совпадают по фазе, но ток İ отстает от ЭДС Ėf или направления поперечной оси q на положительный угол ψ > 0.
 Продольная МДС якоря Fadf направлена встречно МДС возбуждения Ff и результирующая МДС машины Fr уменьшается (см. уравнение (3.61). Вследствие этого уменьшаются результирующий магнитный поток Фr и индуктируемая им ЭДС якоря Еr и напряжение U (см. уравнение (3.60).
Продольная МДС якоря Fadf направлена встречно МДС возбуждения Ff и результирующая МДС машины Fr уменьшается (см. уравнение (3.61). Вследствие этого уменьшаются результирующий магнитный поток Фr и индуктируемая им ЭДС якоря Еr и напряжение U (см. уравнение (3.60).
Следовательно, при активной нагрузке напряжение генератора уменьшается вследствие размагничивающего действия продольной МДС якоря Fadf и падения напряжения на индуктивном сопротивлении рассеяния jxσİ (кривая 1 на рис. 3.15).
Продольная МДС якоря Fadf направлена встречно МДС возбуждения Ff и результирующая МДС машины Fr уменьшается (см. уравнение (3.61). Вследствие этого уменьшаются результирующий магнитный поток Фr и индуктируемая им ЭДС якоря Еr и напряжение U (см. уравнение (3.60).
При активно-индуктивной нагрузке (рис. 3.16, б) ток отстает от напряжения и угол φ между векторами напряжения и тока увеличивается.

При этом возрастают угол ψ размагничивающая продольная МДС якоря Fadf. При одинаковых токах якоря и возбуждения результирующий магнитный поток машины Фr будет ослаблен сильнее, чем при активной нагрузке. Поэтому на рис. 3.15, а кривая 2, соответствующая активно-индуктивной нагрузке, проходит ниже кривой 1. С увеличением индуктивности нагрузки постоянное напряжение генератора можно поддерживать только за счет увеличения МДС возбуждения Ff для компенсации размагничивающей продольной МДС якоря Fadf (сравните диаграммы МДС на рис. 3.16, а, б, в) Поэтому соответствующая активно-индуктивной нагрузке кривая 2 на рис. 3.15, б проходит выше линии 1 при активной нагрузке
При активно-емкостной нагрузке ZH = RH – jxCН (рис. 3.17) угол ψ
 между ЭДС Ėf (осью q) и током якоря İ зависит от соотношения сопротивлений: емкостного – xCН нагрузки и индуктивного xL якоря
между ЭДС Ėf (осью q) и током якоря İ зависит от соотношения сопротивлений: емкостного – xCН нагрузки и индуктивного xL якоря
 (3.62)
(3.62)
При токах якоря
 (3.63)
(3.63)
небольшой величины сопротивление нагрузки ZH велико и его емкостная составляющая xCН > xL. Поэтому угол ψ < 0 (см. формулу (3.62) и ток якоря İ опережает ЭДС Ėf или ось q (рис. 3.16, г). Продольная составляющая МДС якоря Fadf усиливает магнитное поле машины и напряжение обмотки якоря может возрасти. Вследствие этого на рис. 3.15, а соответствующая активно-емкостной нагрузке характеристика 4 проходит выше характеристики 1 при активной нагрузке.
Для увеличения тока якоря (см. формулу (3.63) уменьшают сопротивление нагрузки ZH. За счет этого уменьшается емкостная составляющая сопротивления ZH, отрицательный угол ψ и намагничивающая продольная составляющая МДС якоря Fadf (сравните диаграммы рис. 3.16, г и 3.16, д). При xCН = xL ток якоря достигает наибольшей величины, так как ограничен только активной составляющей сопротивления нагрузки RН. Если ещё уменьшить сопротивление нагрузки ZН, то xCН < xL и угол ψ станет положительным и ток İ отстает от ЭДС Ėf (рис. 3.16, е). Продольная составляющая МДС якоря Fadf оказывает размагничивающее действие и напряжение обмотки якоря уменьшается.
При емкостной нагрузке ψ = φ = – p / 2, реакция якоря продольная намагничивающая (рис. 3.3, б) и напряжение U вначале растет (кривая 5 на рис. 3.15, а). С увеличением тока якоря магнитная система машины насыщается, результирующие поток Фr и ЭДС якоря Еr увеличивается незначительно. При равенстве сопротивлений xCН = xL вследствие резонанса ток достигает большой величины, напряжение машины U при этом максимально. Вследствие этого характеристика 5 на рис. 3.15, а претерпевает разрыв.
Дальнейшее снижение сопротивления нагрузки ZH приводит к пре-обладанию индуктивного сопротивления якоря xL > xCН, угол ψ становится положительным и продольная МДС якоря Fadf ослабляет магнитное поле машины. Поэтому напряжение генератора снижается до нуля вследствие размагничивающего действия МДС якоря и п
на индуктивном сопротивлении рассеяния обмотки якоря. При этом ток якоря снижается до тока короткого замыкания I*К (нижняя ветвь харак-теристики 5 на рис. 3.15, а).
Мелким пунктиром на рис. 3.15 показаны участки характеристик, соответствующие резонансным явлениям и неустойчивой работе генера-тора при емкостной и активно-емкостной нагрузках.
Изменение напряжения генератора при переходе от номинального режима к холостому ходу и неизменном номинальном токе возбуждения (характеристика 2 на рис. 3.15, б) называется номинальным изменением на-пряжения синхронного генератор
а
 , (3.64)
, (3.64)
где E*f H – ЭДС (напряжение) генератора при холостом ходе, U*H – напряжение при номинальной нагрузке (рис. 3.15, б).
 Обычно ΔU*H составляет 0,25–0,35. Вследствие большей величины синхронных сопротивлений xd значения ΔU*H турбогенераторов больше, чем у гидрогенераторов.
Обычно ΔU*H составляет 0,25–0,35. Вследствие большей величины синхронных сопротивлений xd значения ΔU*H турбогенераторов больше, чем у гидрогенераторов.
3.6.4. Регулировочные характеристики
Регулировочной характеристикой называют зависимость тока возбуждения If от тока якоря I при постоянных напряжении U, частоте вращения ротора n и коэффициенте мощности сosφ.
Обычно для экспериментального определения регулировочных характеристик ротор генератора вращают приводным двигателем или турбиной с номинальной частотой nН и на холостом ходу (ZH = ∞ на рис. 3.11) возбуждают машину до номинального напряжения обмотки якоря U = UH. Уменьшают сопротивление ZH и нагружают генератор. Ток возбуждения I f регулируют так, чтобы напряжение U оставалось постоянным. Постоянство сosφ обеспечивают изменением составляющих сопротивления ZH, частоты вращения n – регулированием момента приводного двигателя.
Регулировочные характеристики показывают, как следует регулировать ток возбуждения, чтобы сохранить постоянное напряжение на якоре генератора с увеличением нагрузки.
При активной нагрузке (характеристика 1 на рис. 3.18) для сохранения постоянства напряжения U необходимо увеличить ток I f и МДС F f возбуждения для компенсации размагничивающего действия продольной МДС якоря Fad (рис. 3.16, а) и падения напряжения на индуктивном сопротивлении рассеяния.
 С увеличением индуктивности нагрузки размагничивающее действие продольной МДС якоря Fad усиливается (см. рис. 3.16, б, в) и ток возбуждения нужно увеличивать в большей мере, чем при активной нагрузке. Поэтому характеристики 2, 3 на рис. 3.18, соответствующие активно-индуктивной и индуктивной нагрузкам проходят выше характеристики 1.
С увеличением индуктивности нагрузки размагничивающее действие продольной МДС якоря Fad усиливается (см. рис. 3.16, б, в) и ток возбуждения нужно увеличивать в большей мере, чем при активной нагрузке. Поэтому характеристики 2, 3 на рис. 3.18, соответствующие активно-индуктивной и индуктивной нагрузкам проходят выше характеристики 1.
В случае активно-емкостной нагрузки (характеристика 4 на рис. 3.18) при малых токах якоря необходимо уменьшать ток возбуждения, так как продольная МДС якоря Fad усиливает магнитное поле машины
(рис. 3.16, г, д) и напряжение генератора U возрастает (кривая 4 на рис. 3.15) если не изменять ток возбуждения.
С увеличением емкости нагрузки МДС якоря оказывает размагничивающее действие (ψ > 0 на рис. 3.16, е) и необходимо увеличивать ток возбуждения, чтобы напряжение U было неизменно.
При емкостной нагрузке (характеристика 5 на рис. 3.18) необходимо уменьшать ток возбуждения If с ростом тока якоря I, поскольку МДС якоря продольная намагничивающая. В точке D ток возбуждения I f = 0 и магнитное поле машины образовано МДС якоря. Ток якоря при этом
 . (3.65)
. (3.65)
Появление напряжения на выводах включенной на емкость обмотки якоря невозбужденной машины называют явлением самовозбуждения.
3.6.5. Нагрузочные характеристики
Нагрузочная характеристика – это зависимость напряжения обмотки U обмотки якоря от тока возбуждения If, при постоянных токе якоря I, частоте вращения n ротора машины и коэффициенте мощности сosφ.
Для опытного определения нагрузочных характеристик при номинальных напряжении UH и частоте вращения nН нагружают генератор до заданных значений тока якоря I и коэффициента мощности сosφ.
 Уменьшают ток возбуждения и регулируют сопротивление нагрузки ZН (рис. 3.11) так, чтобы сosφ и ток I оставались постоянными.
Уменьшают ток возбуждения и регулируют сопротивление нагрузки ZН (рис. 3.11) так, чтобы сosφ и ток I оставались постоянными.
Частным случаем нагрузочной характеристики можно считать х.х.х. U = f ( I f ) при n = const и I = 0.
Различие напряжений обмотки якоря при холостом ходе и нагрузке обусловлено реакцией якоря и падением напряжения на сопротивлении рассеяния (см. уравнения (3.42)–(3.45) и (3.60)–(3.61). При постоянном токе якоря МДС Fadf и падение напряжения хσI неизменны.
Поэтому нагрузочные характеристики (в области устойчивости) подобны х.х.х. и в случаях активной, активно-индуктивной или индуктивной нагрузок проходят ниже, а при активно-емкостной и емкостной – выше х.х.х. (рис. 3.19). Напряжение U = 0 соответствует режиму короткого замыкания (ZH = 0). Вследствие этого все нагрузочные характеристики при U = 0 и одинаковом токе якоря I выходят из одной точки А (рис. 3.19), соответствующей току возбуждения при коротком замыкании с током I.
Наибольший практический интерес представляет индукционная нагрузочная характеристика ( и.н.х.) при работе генератора на индуктивную нагрузку. С помощью этой характеристики и х.х.х. можно найти стороны реактивного треугольника: приведенную к обмотке возбуждения МДС якоря Fadf и индуктивное сопротивление Потье хР ≈ (1,1–1,3)хσ (рис. 3.20). От точки пересечения С / и.н.х. с линией U* = U*H = 1,0 = сonst проводят отрезок 0/С / = 0C параллельно оси абсцисс. Из точки 0/ чертят прямую 0/d /, параллельную линейной части х.х.х. 0d, до пересечения с х.х.х. в точке А/. Опустив перпендикуляр из точки А/ на отрезок 0/С /, получают точку В/ и реактивный треугольник А/В/С/ (на рис. 3.20 показан сплошной линией).
Катет реактивного треугольника B/С /= Fadf .
Индуктивное сопротивление рассеяния якоря (сопротивление Потье)
 . (3.66).
. (3.66).
 Из векторной диаграммы генератора при индуктивной нагрузке на рис. 3.20 следует, что отрезок DС /= jxPİ + jxad Hİ ≈ jxσİ + jxad Hİ = jxd Hİ. Отсюда можно определить насыщенное синхронное индуктивное сопротивление по продольной оси xdН (или xCН в неявнополюсной машине):
Из векторной диаграммы генератора при индуктивной нагрузке на рис. 3.20 следует, что отрезок DС /= jxPİ + jxad Hİ ≈ jxσİ + jxad Hİ = jxd Hİ. Отсюда можно определить насыщенное синхронное индуктивное сопротивление по продольной оси xdН (или xCН в неявнополюсной машине):
 . (3.67)
. (3.67)
С помощью найденного по х.к.з. и х.х.х. реактивного треугольника АВС (рис. 3.13) и х.х.х. можно графически определить и.н.х. машины.
Для этого совмещают катет ВС треугольника АВС (на рис. 3.20 показан пунктирной линией) с осью МДС F*f = I*f, а вершину А с начальным участком х.х.х. Перемещают треугольник АВС параллельно самому себе так, чтобы точка А скользила по х.х.х., траектория точки С определяет положение точек и.н.х., изображенной на рис. 3.20 пунктирной линией. Найденная таким образом и.н.х. при напряжениях якоря U ≥ 0,7UН проходит немного выше опытной и.н.х., показанной на рис. 3.20 сплошной линией.
Расхождение характеристик обусловлено тем, что при постоянном токе якоря в режиме индуктивной нагрузки с U* ≥ 0,7U*H требуется значительно увеличивать ток возбуждения по сравнению с режимом короткого замыкания при U* = 0 (сравните МДС возбуждения в точках F*f и С на оси МДС рис. 5.20). При этом возникает дополнительное насыщение ротора потоком рассеяния обмотки возбуждения. Магнитные напряжения Fa2, Fm (рис. 3.2) или Fa2, FZ2 (рис. 3.3) магнитопровода ротора сильно увеличиваются по сравнению с их пренебрежимо малой величиной, обусловленной слабым насыщением магнитопровода генератора при коротком замыкании. Для компенсации увеличения магнитных напряжений Fa2 и Fm или FZ2 необходимо дополнительно увеличить МДС или ток возбуждения на ΔF*f = ΔI*f. Величина ΔF*f или ΔI*f и определяет различие опытной (сплошная линия на рис. 3.20) и расчетной (пунктирная линия) и.н.х. Реактивный треугольник АВС не учитывает этого, так как его катет ВС определен по х.к.з. при отсутствии насыщения магнитопровода машины.
Катет А/В/ реактивного треугольника А/В/С/, найденного по опытной и.н.х., больше катета АВ треугольника АВС, определенного по х.х.х. и х.к.з. Поэтому искусственно введенное для учета насыщения ротора потоком рассеяния обмотки возбуждения индуктивное сопротивление Потье хР, определяемое по формуле (3.66), больше сопротивления рассеяния xσ. В большинстве синхронных машин хР = (1,1–1,3) xσ, для турбогенераторов хР можно определить по формуле (3.37).
Индуктивное сопротивление Потье хР следует использовать для расчетов работы генераторов в режимах с отстающим cosφ (активно-индуктивная и индуктивная нагрузки) при U ≥ 0,7UН.
3.6.6. Потери мощности и КПД синхронного генератора
Преобразование энергии в синхронном генераторе можно объяснить с помощью энергетической диаграммы (рис. 3.21).
К валу генератора от турбины или приводного двигателя подводится механическая мощность, Вт,
 , (3.68)
, (3.68)
 где Ω – угловая механическая ско-рость вращения ротора, равная угловой скорости вращения Ω1 магнитного поля машины, рад/с; М1 – механический вращающий момент турбины или приводного двигателя, Нм.
где Ω – угловая механическая ско-рость вращения ротора, равная угловой скорости вращения Ω1 магнитного поля машины, рад/с; М1 – механический вращающий момент турбины или приводного двигателя, Нм.
Часть этой мощности рассеивается в виде тепла, выделяемого в различных частях машины, и называется потерями мощности или просто потерями.
Потери мощности на возбуждение, Вт,
 , (3.69)
, (3.69)
где rf I f 2 – электрическая мощность возбуждения генератора, Вт; I f – ток возбуждения, А; U f – напряжение возбуждения, В; rf – сопротивление обмотки возбуждения, Ом; η f – КПД возбудителя, о.е.
При работе генератора в режиме внешней характеристики ток I f и потери мощности на возбуждение рf постоянны и не зависят от тока якоря I. В общем случае при параллельной работе генератора с сетью с изменением нагрузки приходится регулировать и ток возбуждения, то есть ток возбуждения зависит от тока якоря If = f ( I ). В дальнейшем для большей простоты будем считать I f и рf постоянными, не зависящими от нагрузки генератора.
Механические потери мощности рМЕХ состоят из потерь на вентиляцию машины и на трение в подшипниках, ротора об охлаждающий газ, щеток о контактные кольца. Механические потери в общем виде зависят от частоты вращения ротора
 , (3.70)
, (3.70)
где α = 2–3 – постоянный коэффициент, определяемый схемой вентиляции машины и другими факторами; С1 – постоянный коэффициент.
Частота вращения ротора n в установившихся режимах работы постоянна и при α = сonst механические потери можно считать не зависящими от нагрузки генератора.
Добавочные потери мощности рД обусловлены магнитными полями рассеяния обмоток, высшими гармоническими магнитного поля в зазоре и наличием пазов на статоре и роторе машины.
Изменяющиеся во времени с основной частотой f1 магнитные потоки рассеяния обмоток индуктируют в магнитопроводах, проводниках обмоток, корпусе и других конструктивных металлических частях машины вихревые токи. Эти токи образуют добавочные потери мощности, что влечет за собой дополнительный нагрев частей машины.
Высшие гармонические магнитного поля в зазоре машины перемагнивают с повышенной частотой близкие к зазору части сердечников статора и ротора, а также индуктируют токи повышенной частоты в обмотках якоря и демпферной. Эти явления также сопровождаются добавочными потерями в этих частях машины и их повышенным нагревом.
При вращении ротора возникают пульсации магнитной проводимости или магнитного сопротивления зазора из-за наличия пазов на статоре и пазов или немагнитных межполюсных промежутков на роторе. Вследствие этого возникают высокочастотные пульсации магнитного поля в зубцах статора и ротор (или полюсных наконечников), сопровождающиеся добавочными потерями мощности в них и их повышенным нагревом.
При относительно небольшой величине добавочных потерь их концентрация в отдельных частях машины (крайние пакеты стали сердечника статора; зубцы статора; нажимные пальцы, плиты и кольца статора; демпферная обмотка) бывает настолько велика, что ограничивает нагрузку генераторов большой мощности в некоторых режимах.
В большинстве синхронных машин добавочные потери невелики (рД ≤ 0,005Р1Н) и при расчетах КПД часто принимают рД = 0.
Оставшаяся часть механической мощности
 (3.71)
(3.71)
передается магнитным полем машины через зазор δ на статор генератора. Эта часть мощности называется электромагнитной мощностью Р = РМЕХ.
Часть электромагнитной мощности выделяется в виде тепла в магнитопроводе статора вследствие его перемагничивания вращающимся магнитным полем машины. Это магнитные потери мощности рМ, состоящие из потерь на гистерезис (перемагничивание) рГ и на вихревые токи рВ
:
 , (3.72)
, (3.72)
где С2 – постоянный коэффициент; В – индукция магнитного поля в магнитопроводе статора. В синхронных машинах, включенных в сеть, результирующий магнитный поток Фr мало зависит от нагрузки (см. главу 6) и индукцию В можно считать постоянной. Не меняется также частота f1 перемагничивания магнитопровода статора. При этих условиях согласно (3.72) магнитные потери рМ также не зависят от нагрузки генератора.
Электрические потери мощности в обмотке якоря, Вт,
 , (3.73)
, (3.73)
где m – число фаз якоря; r – активное сопротивление фазы обмотки якоря, Ом; I – фазный ток якоря, А.
Вследствие того, что электрическая мощность отдаваемая генератором нагрузке пропорциональна току якоря, электрические потери мощности в обмотке якоря сильно изменяются с нагрузкой машины.
Полезная электрическая мощность, отдаваемая генератором нагрузке или в сеть, Вт,
 , (3.74)
, (3.74)
где U – фазное напряжение, В, и I – фазный ток, А, обмотки якоря.
Подставив в (3.74) выражение электромагнитной мощности Р = РМЕХ из формулы (3.71), получим:
 , (3.75)
, (3.75)
где Σр – полные или суммарные потери мощности в машине
 . (3.76)
. (3.76)
КПД определяется отношением полезной электрической мощности Р2 к подводимой механической мощности Р1:
 (3.77)
(3.77)
У синхронных генераторов η достигает 0,96–0,988 и даже небольшие погрешности при измерении близких значений мощностей Р1 и Р2 приводят к существенным ошибкам при прямом определении КПД по формуле (3.77). Поэтому обычно определяют КПД косвенным методом через полные потери Σр и полезную электрическую мощность Р2, так как её легче измерить, чем механическую мощность Р1. Подставив выражение (3.75) в (3.77), получим
 . (3.78)
. (3.78)
Выразив Р1 через Р2 и Σр из (3.75) и подставив в (3.78), найдем
 (3.79)
(3.79)
Полные потери мощности Σр принято делить на постоянные, не зависящие от нагрузки, и переменные, зависящие от нагрузки генератора. Постоянные потери называют также потерями холостого хода рХХ.
С учётом принятых ранее допущений потери холостого хода
 (3.80)
(3.80)
К переменным потерям или потерям короткого замыкания рК относят электрические потери в обмотке якоря.
Согласно формуле (3.74) при работе генератора с постоянными напряжением U и коэффициентом мощности сosφ ток якоря I пропорционален отдаваемой генератором электрической мощности Р2.
В этом случае коэффициент загрузки машины
 (3.81)
(3.81)
Обозначим потери короткого замыкания при номинальном токе якоря рКН = mrIH2. Любое текущее значение потерь короткого замыкания можно выразить через рКН и kЗ, подставив в (3.73) ток I из (3.81),
 (3.82)
(3.82)
Полные потери мощности
 , (5.83)
, (5.83)
характер изменения Σр от загрузки показан на рис. 3.22.
Если напряжение генератора U = UH = const, то полезную электрическую мощность Р2 можно выразить через kЗ, и полную номинальную мощность SH:
 (3.84)
(3.84)
Подставив в формулу (3.79) выражения (3.83), (3.84), получим зависимость КПД от коэффициентов загрузки kЗ и мощности сosφ:
 (3.85)
(3.85)
В режиме холостого хода (Р2 = 0) к валу генератора подводится механическая мощность Р1, равная потерям холостого хода рХХ, при этом КПД η = 0 (рис. 3.22).
С увеличением нагрузки генератора КПД вначале быстро возрастает, так как при малой загрузке (kЗ близок к нулю) потери короткого замыкания рК и полные потери Σр увеличиваются медленно, а полезная мощность Р2 – быстро. Так КПД η = 0,5, когда Р2 = Σр ≈ рХХ, то есть при малом коэффициенте загрузки kЗ = 0,005–0,05 (точка kЗ / на рис. 3.22).
В дальнейшем рост КПД замедляется вследствие увеличения переменных потерь в квадратичной зависимости от kЗ (см. формулу (3.82). При коэффициенте загрузки kЗmax КПД достигает максимума. Условие максимума КПД определим, приравняв нулю производную,
 (3.86)
(3.86)
 Из (3.86) следует, что КПД достигает максимума при равенстве постоянных рХХ и переменных рК потерь (точка kЗmax на рис.3.22)
Из (3.86) следует, что КПД достигает максимума при равенстве постоянных рХХ и переменных рК потерь (точка kЗmax на рис.3.22)
 (3.87)
(3.87)
Если известны постоянные рХХ и номинальные переменные рКН потери можно определить значение коэффициента загрузки, соответствующее максимуму КПД,
Обратите внимание на лекцию “Противоэпизоотическая защита крупных хозяйств промышленного типа”.
 (3.88)
(3.88)
У большинства генераторов КПД максимален при коэффициенте загрузки kЗmax = 0,6–1,0.
Дальнейшее увеличение нагрузки генератора (kЗ > kЗmax ) уменьшает КПД машины из-за более быстрого роста переменных потерь пропорциональных квадрату загрузки рК ≡ kЗ2 по сравнению с увеличением полезной мощности пропорционально первой степени загрузки Р2 ≡ kЗ.
При изменении нагрузки в пределах kЗ = 0,25–1,0 КПД остаётся высоким, отличаясь от максимального не более чем на 0,01–0,05, то есть машина работает с достаточно высокими энергетическими показателями.
С увеличением номинальной мощности генераторов КПД возрастает и достигает 98,85 % и 98,5 % у турбо- и гидрогенераторов соответственно.
Повышение коэффициента мощности увеличивает КПД генераторов (рис. 3.22), так как при одинаковом токе якоря активная мощность Р2 стре-мится к полной S, а суммарные потери Sp неизменны (см. формулу (3.85).
