Определение сопротивления якорной цепи двигателя. Расчет механических характеристик при номинальном напряжении на якоре
Страницы работы
Фрагмент текста работы
Министерство сельского хозяйства Российской Федерации
Красноярский Государственный Аграрный Университет
Кафедра электроснабжения
Контрольная работа № 4
Машины постоянного тока
Вариант № 53
Выполнил: ст. гр. ЭТ-33
Гольцман Ю.В.
Проверил: преподаватель
Мещеряков
А.В.
Красноярск 2004
Контрольная работа № 4
Машины постоянного тока
Вариант № 53
1.
Начертить электрическую схему
соединения обмоток двигателя постоянного тока с параллельным возбуждением.
2.
Приближенно определить
сопротивление якорной цепи двигателя.
3.
Рассчитать рабочие характеристики
по техническим данным двигателя. Начертить графики рабочих характеристик.
4.
По заданному значению пускового
тока или момента определить сопротивление пускового реостата.
5.
Рассчитать естественную
механическую характеристику ![]() и искусственные
и искусственные
(реостатные) механические характеристики при добавочных сопротивлениях,
последовательно включенных в цепь якоря. Начертить графики характеристик.
6.
Рассчитать механические
характеристики при номинальном напряжении на якоре и ослаблении магнитного
потока на 20% и 40%. Начертить графики характеристик.
Технические данные двигателя постоянного тока
|
Номинальные |
Число полюсов
|
Сопротивления |
||||
|
напряжение
|
мощность
|
частота вращения
|
КПД
|
якорной цепи
|
обмотки возбуждения
|
|
|
220 |
22,0 |
1000 |
0,82 |
4 |
0,181 |
77,6 |
Приближенное определение
сопротивления якорной цепи двигателя
Номинальная мощность, потребляемая двигателем из
сети
где
![]() -номинальная механическая мощность на валу
-номинальная механическая мощность на валу
двигателя, кВт
![]() -номинальный КПД, о.е.
-номинальный КПД, о.е.
Суммарные потери
мощности в двигателе при номинальной нагрузке
![]()
Номинальный
ток двигателя

где
![]() -номинальное напряжение, В
-номинальное напряжение, В
Номинальный
ток возбуждения
где
![]() -сопротивление обмотки возбуждения, Ом
-сопротивление обмотки возбуждения, Ом
Номинальный
ток якоря
![]()
Приближенно
считаем, что электрические потери мощности ![]() в
в
якорной цепи двигателя с параллельным возбуждением составляют половину
суммарных потерь мощности в двигателе
![]()
Сопротивление
якорной цепи двигателя

Рабочие характеристики двигателя ![]() , при
, при ![]()
Номинальная угловая
механическая скорость вращения якоря

где ![]() –
–
номинальная частота вращения якоря, об/мин
Произведение конструктивной постоянной машины Се
на номинальный магнитный поток Фн

Угловая механическая скорость вращения якоря при «идеальном»
холостом ходе
Номинальный,
полезный момент на валу
Электрические потери мощности в якорной цепи
двигателя при номинальной нагрузке
![]()
Потери мощности при холостом ходе двигателя
![]()
Потери мощности в обмотке возбуждения при
номинальном токе возбуждения
![]()
Момент холостого
хода двигателя

Электромагнитный
момент
![]()
Ток якоря двигателя
где ![]() при расчётах в системе СИ.
при расчётах в системе СИ.
Угловая
механическая скорость вращения якоря

Частота вращения
якоря

Полезная механическая мощность на валу
![]()
Электрические
потери мощности в якорной цепи
![]()
![]()
Электрическая
мощность, потребляемая двигателем из сети
![]()
Ток, потребляемый двигателем из
сети

КПД двигателя
Результаты расчёта рабочих характеристик
|
|
0 |
0,25 |
0,5 |
0,75 |
1,0 |
1,25 |
|
|
0 |
52,55 |
105,09 |
157,6 |
210,19 |
262,74 |
|
|
14 |
66,66 |
119 |
171,75 |
224 |
276,85 |
|
|
7,44 |
35,16 |
62,88 |
90,59 |
118 |
146 |
|
|
115,33 |
112,68 |
110,04 |
107,39 |
104,74 |
102,09 |
|
|
1101,86 |
1076,58 |
1051,29 |
1026,02 |
1000,74 |
975,46 |
|
|
0 |
5,92 |
11,56 |
16,93 |
22,02 |
26,83 |
|
|
0,01 |
0,224 |
0,716 |
1,485 |
2,533 |
3,859 |
|
|
2,27 |
8,41 |
14,54 |
20,68 |
26,81 |
32,95 |
|
|
10,32 |
34,21 |
66,09 |
93,98 |
121,87 |
149,75 |
|
|
0 |
0,704 |
0,795 |
0,819 |
0,821 |
0,814 |

График зависимостей I, M2 = f (P2)
График зависимости Р1 = f (Р2)
График зависимости h = f (P2
)
График зависимости n = f (P2)
Определение сопротивления пускового реостата
Сопротивление пускового реостата, если задан пусковой
ток якоря ![]()

Механические характеристики двигателя при различных
добавочных сопротивлениях в цепи якоря
Частота вращения «идеального» холостого хода двигателя

Угловая механическая скорость вращения при
номинальном моменте на валу

где ![]() -номинальный
-номинальный
электромагнитный момент двигателя (Нм) при 
Соответствующая
частота вращения якоря
|
|
|
|
|
|
|
104,74 |
70,86 |
36,976 |
|
|
1000,738 |
677,008 |
353,277 |
Механические характеристики при разных добавочных
сопротивлениях в цепи якоря двигателя: 1 – естественная (RЯД=0); 2,3 – искусственные реостатные при RЯД1= 3RЯ и RЯД2= 6RЯ.
Механические характеристики при ослаблении магнитного
потока двигателя.
При уменьшении магнитного
потока в двигателях параллельного возбуждения увеличивается механическая
угловая скорость вращения якоря при «идеальном» холостом ходе
![]()

где К – коэффициент, учитывающий отношение
магнитного потока после его уменьшения по отношению к номинальному, о.е.
Частота вращения якоря при «идеальном» холстом ходе
Соответствующую второй точке механической
характеристики угловую механическую скорость вращения якоря определим по
формуле механической характеристики при номинальном моменте на валу М2Н

где
![]() -номинальный электромагнитный момент
-номинальный электромагнитный момент
двигателя (Нм) при .
Частота вращения якоря

|
К=1 |
К=0,8 |
К=0,6 |
|
|
|
116 |
145,048 |
193,397 |
|
|
1108,6 |
1385,809 |
1847,746 |
|
|
104,7 |
127,4 |
162,024 |
|
|
1000,738 |
1217,2 |
1547,996 |
Механические характеристики при разных значениях
магнитного потока: 1 – естественная (Ф=ФН, к=1); 2,3 – искусственные
при ослабленном магнитном
Похожие материалы
- Асинхронные машины. Расчет трехфазных асинхронных двигателей
- Инструкция по эксплуатации выключателей ВМП(Э)-10
- Расчет параметров уточнённой Г–образной схемы замещения асинхронного двигателя. Расчет рабочих и пусковых характеристик
Информация о работе
С
учетом размагничивающего действия
реакции якоря МДС возбуждения должна
превышать МДС расчетного рабочего
режима
FВЗ
= 1,2F
= 1,23117
= 3740 А. (6.1)
Выбираем
схему стартерного электродвигателя с
последовательным возбуждением и попарно
параллельным соединением катушек (аС
= 2), приведенную на рисунке 11.

Рисунок
11- Схема соединения катушек возбуждения
Для
электродвигателя с последовательным
возбуждением число витков в катушке
может быть дробным, но обязательно
кратным 0,5. Число витков в катушке
![]() (6.2)
(6.2)
где
аС
= 2 – число попарно параллельно соединенных
катушек.
Сопротивление обмотки возбуждения
RC
= RCT
– RЯ
= 0,003 – 0,00178 = 0,00122 Ом. (6.3)
Сопротивление катушки
![]() (6.4)
(6.4)
где
zC
= 4 – число катушек.
![]() (6.5)
(6.5)
Максимально
возможная ширина катушки
 (6.6)
(6.6)
Средняя
длина витка катушки
LK
= 2lm
+ 2bm
+ b*K
= 20,057
+ 20,027
+ 0,015
= 0,215 м. (6.7)
Площадь сечения провода
![]() (6.8)
(6.8)
Высота
катушки
hK
= hm
– hHK
= 0,008 – 0,0024 = 0,0056 м. (6.9)
Витки
катушек изолированы электроизоляционным
картоном толщиной ИЗ
= 0,410-3
м. Снаружи катушки изолированы
хлопчатобумажной лентой толщиной 0,25
мм и шириной 15 мм, пропитанной лаком.
После пропитки и сушки толщина внешней
изоляции катушки составляет ВН
= 10-3
м ([2], с. 49).
Ширина
провода
bC
= hK
– ВН
= 0,0056 – 0,001 = 0,0046 м. (6.10)
По
рассчитанному значению площади сечения
выбираем провод шириной bC
= 0,0108 м, толщиной аC
= 0,00181 м и площадью сечения SC
= 19,310=6
м2
([4], с. 562).
Действительная
ширина катушки
bK
= ac
+ ИЗ(-1)
+ 2ВН
= 0,001816,5
+ 0,410-35,5
+ 210-3
= 0,015 м. (6.11)
Уточненное
значение сопротивления катушки
![]() (6.12)
(6.12)
Уточненное
значение сопротивления обмотки
![]() (6.13)
(6.13)
Плотность
тока в обмотке возбуждения
![]() (6.14)
(6.14)
меньше
допустимого ([1], с. 76) значения 30106
А/м2.
Уточненное значение суммарного сопротивления обмотки якоря и возбуждения
RСТ
= RЯ
+ RС
= 0,00178 + 0,0013 = 0,00301 Ом.
Уточненное значение суммарного сопротивления цепи якоря
RЯ
= RCT
+ Rб
+ RПР
= 0,00301 + 0,007 + 0,002 = 0,012 Ом.
7 Рабочие характеристики
Сила
тока в режиме торможения
![]() (7.1)
(7.1)
Сила
тока в режиме максимальной электромагнитной
мощности
![]() (7.2)
(7.2)
Максимальная
электромагнитная мощность
 (7.3)
(7.3)
Параметры,
необходимые для построения рабочих
характеристик, определяем для нескольких
значений силы тока стартера. Ниже
приведены результаты расчета для силы
тока IЯm
= 458 А.
Напряжение
на выводах стартера
UCT
= UH
– RСТIЯ
= 12 – 0,003458
= 10,6 В.
(7.4)
Мдс возбуждения на два полюса
![]() (7.5)
(7.5)
Линейная
нагрузка якоря
![]() (7.6)
(7.6)
МДС
поперечной реакции якоря
Fq
= ПОЛА
= 0,650,0643546
= 1700 А.
Расчет
B*
проводим
согласно рисунку 12 по данным расчета
кривой намагничивания (рисунок 10).

Рисунок
12- Расчет учета размагничивающего
действия реакции якоря
FСР
принимаем равным FВЗ
= 2977 А.
Fmin
= FCP
– Fq
= 2977 – 1700 = 1277 А.
Fmax
= FCP
+ Fq
= 2977 + 1700 = 4677 А.
Из
рисунка 10 для FCP
=
2977 А BCP
= 0,86 Тл, для Fmin
=
1277 А Bmin
= 0,65 Тл, для Fmax
=
4677 А Bmax
= 0,97 Тл.
Магнитная
индукция в воздушном зазоре с учетом
размагничивающего действия реакции
якоря
 (7.7)
(7.7)
Магнитный
поток
![]()
ЭДС
в обмотке якоря
EЯ
= UH
– UЩ
– IЯRЯ
= 12 – 1 – 4580,012
= 5,5 В.
Частота вращения якоря в режиме максимальной электромагнитной мощности
![]() (7.8)
(7.8)
Электромагнитная
мощность
P
= EЯIЯ
= 5,5458
= 2519 Вт. (7.9)
Потери
мощности на трение в подшипниках
![]() (7.10)
(7.10)
Окружная
скорость коллектора
![]() (7.11)
(7.11)
Потери
на трение между щетками и коллектором
PЩ
= kТРFЩNЩКОЛ
= 0,31247,53
= 108,4 Вт, (7.12)
где kТР
= 0,3 – коэффициент трения ([2], с. 42);
FЩ
= 12 Н – сила давления щетки на коллектор;
NЩ
= 4 – число щеток.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #

В этой статье описаны основные формулы, величины и их обозначения которые относятся ко всем двигателям постоянного тока.
В результате взаимодействия Iя тока якоря в проводнике L обмотки якоря с внешним магнитным полем возникает электромагнитная сила создающая электромагнитный момент М который приводит якорь во вращение с частотой n.
Противо ЭДС двигателя Eя
При вращении якоря пазовый проводник пресекает линии поля возбуждения с магнитной индукцией B и в соответствии с явлением электромагнитной индукции в проводнике наводится ЭДС Eя направленная навстречу Iя. Поэтому эта ЭДС называется противо ЭДС и она прямо пропорциональна Ф магнитному потоку и частоте вращения n.
Eя = Се * Ф * n (1)
Ce — постоянный коэффициент определяемой конструкцией двигателя.
Применив второй закон Кирхгофа получаем уравнение напряжения двигателя.
U = Eя + Iя * ∑R (2)
где ∑R — суммарное сопротивления обмотки якоря включающая сопротивление :
- обмотки якоря
- добавочных полюсов
- обмотки возбуждения (для двигателей с последовательным возбуждением)
Ток якоря Iя
Выразим из формулы 2 ток якоря.

Частота вращения якоря
Из формул 1 и 2 выведем формулу для частоты вращения якоря.

Электромагнитная мощность двигателя
Pэм = Ея Iя (5)
Электромагнитный момент

где: ω = 2*π*f — угловая скорость вращения якоря, Cм — постоянный коэффициент двигателя (включает в себя конструктивные особенности данного двигателя)

Момент на валу двигателя, т.е. полезный момент, где М0 момент холостого хода;
Р2 — полезная мощность двигателя
Теория электропривода
Расчет сопротивлений для якорной цепи ДНВ
Сопротивления, вводимые в якорную цепь ДНВ могут быть пусковые, тормозные и регулировочные. Рассмотрим метод расчета пусковых сопротивлений, которые вводятся для ограничения пускового тока. При пуске двигателя в ход его ЭДС=0 и пусковой ток определяется только приложенным напряжением и сопротивлением якорной цепи.
![]()
Без добавочного сопротивления он может в 10-20 раз превышать номинальный ток, что не допустимо по условиям коммутации.
 При пуске с добавочным сопротивлением двигатель работает последовательно на ряде механических характеристик с постепенно уменьшающейся крутизной. Чем больше ступеней пускового сопротивления, тем плавнее разгон. Обычно число их не более 3-5.
При пуске с добавочным сопротивлением двигатель работает последовательно на ряде механических характеристик с постепенно уменьшающейся крутизной. Чем больше ступеней пускового сопротивления, тем плавнее разгон. Обычно число их не более 3-5.
Необходимую величину добавочного сопротивления, соответствующего какой-либо механической характеристике, можно найти из уравнения характеристики или непосредственно из графика, т. е. пусковой диаграммы. Действительно, из нее видно, что отрезок аb при моменте М1 есть падение скорости двигателя при отсутствии добавочного сопротивления в цепи якоря, а отрезок ае соответствует падению скорости при введении добавочного сопротивления, соответствующего пусковой характеристике при w=0. Отсюда следует, что эти отрезки в некотором масштабе одновременно характеризуют сопротивление цепи якоря. Следовательно, в этом масштабе отрезок аб определяет сопротивление обмотки якоря, а отрезок ае – полное сопротивление якорной цепи при пуске двигателя в ход.
Вообще расчет пусковых сопротивлений ведется в 2 этапа:
1. Определяется полное сопротивление ![]() .
.
2. Производится разбивка на секции, чтобы двигатель работал на правильной пусковой диаграмме.
Расчет может быть графическим и аналитическим.
При графическом расчете строятся характеристики ![]() или
или ![]() , на которых двигатель должен работать в процессе пуска, т. е. строится пусковая диаграмма. Воспользуемся зависимостями
, на которых двигатель должен работать в процессе пуска, т. е. строится пусковая диаграмма. Воспользуемся зависимостями ![]() . Сначала по паспортным данным двигателя строится естественная характеристика. По оси абсцисс откладываются значения пускового тока IЯ1, тока переключения IЯ2 и тока статической нагрузки IС. Значения этих токов (соответственно моментов) берутся в пределах
. Сначала по паспортным данным двигателя строится естественная характеристика. По оси абсцисс откладываются значения пускового тока IЯ1, тока переключения IЯ2 и тока статической нагрузки IС. Значения этих токов (соответственно моментов) берутся в пределах ![]() .
.

 Соединив т. е с т. w0, получим пусковую характеристику при работе с полным добавочным сопротивлением. Т. к. ток
Соединив т. е с т. w0, получим пусковую характеристику при работе с полным добавочным сопротивлением. Т. к. ток ![]() , двигатель начнет разгоняться, а ток якоря будет уменьшаться. По достижении им значения, равного IЯ2, часть сопротивления отключается, ток скачком возрастает до значения IЯ и двигатель переходит для работы на новой характеристике (от т. d), на которой он будет работать до т. n, где выключается следующая ступень пускового сопротивления и т. д. до выхода на естественную характеристику в т. b. Если это не получится, необходимо изменить значение тока IЯ2 и выполнить построение пусковой диаграммы заново т. о., чтобы переход с последней пусковой характеристики на естественную произошел именно при токе IЯ1 (в т. в). Обозначив сопротивление якорной цепи при пуске Rm (см. схему включения сопротивлений на рис.), на 2-й через Rm-1 и т. д., то сопротивлению Rm на пусковой диаграмме соответствует отрезок ае, сопротивлению Rm-1 – отрезок ad и т. д. Отключаемым на каждой ступени сопротивлениям соответствуют отрезки de, cd, bc. Масштаб сопротивлений можно найти исходя из отрезка ав и известной величины RЯ. Но т. к. отрезок ав невелик и это может вызвать большую погрешность, удобнее находить масштаб по отрезку ае. Этому отрезку соответствует
, двигатель начнет разгоняться, а ток якоря будет уменьшаться. По достижении им значения, равного IЯ2, часть сопротивления отключается, ток скачком возрастает до значения IЯ и двигатель переходит для работы на новой характеристике (от т. d), на которой он будет работать до т. n, где выключается следующая ступень пускового сопротивления и т. д. до выхода на естественную характеристику в т. b. Если это не получится, необходимо изменить значение тока IЯ2 и выполнить построение пусковой диаграммы заново т. о., чтобы переход с последней пусковой характеристики на естественную произошел именно при токе IЯ1 (в т. в). Обозначив сопротивление якорной цепи при пуске Rm (см. схему включения сопротивлений на рис.), на 2-й через Rm-1 и т. д., то сопротивлению Rm на пусковой диаграмме соответствует отрезок ае, сопротивлению Rm-1 – отрезок ad и т. д. Отключаемым на каждой ступени сопротивлениям соответствуют отрезки de, cd, bc. Масштаб сопротивлений можно найти исходя из отрезка ав и известной величины RЯ. Но т. к. отрезок ав невелик и это может вызвать большую погрешность, удобнее находить масштаб по отрезку ае. Этому отрезку соответствует ![]() .
.
 Наиболее прост и нагляден расчет пусковых сопротивлений в относительных единицах.
Наиболее прост и нагляден расчет пусковых сопротивлений в относительных единицах.
При этом аналогично рассмотренному выше задаются значениями пускового и переключающего моментов М1, М2 и строится пусковая диаграмма.
Затем из точки соответствующей моменту m=1 проводится вертикаль. Отрезки ее между прямой, соответствующей n=1 и каждой данной механической характеристикой дадут значения полного сопротивления цепи якоря на каждой ступени. Например, полное сопротивление цепи якоря при пуске rm соответствует отрезку ав. Отрезки же между соседними характеристиками при m=1, дадут величины отключаемого сопротивления на каждой ступени. Величины сопротивления в Омах будут ![]() , где RH – номинальное сопротивление двигателя.
, где RH – номинальное сопротивление двигателя.
С целью получения расчетных соотношений для аналитического расчета пусковых сопротивлений напишем выражение для скорости w1 исходя из 1-й и 2-й реостатных характеристик.
![]() , откуда
, откуда ![]() .
.
Написав аналогично выражения для скоростей w2, w3 и т. д. получим ряд равенств:
![]()
![]()
![]()
……………………..
![]()
Перемножая правые и левые части и сокращая общие множители, получим:
![]()
Это означает, что при правильно рассчитанной пусковой диаграмме имеют место соотношения ![]() .
.
Обозначив отношение ![]() через l, получим
через l, получим  .
.
При заданной кратности пусковых токов (или моментов) число пусковых ступеней будет равно:  .
.
Для расчета пусковых сопротивлений определяют ![]() , задаются величиной l и находят m. Если m получается дробным, его округляют до условного числа и находят новое значение
, задаются величиной l и находят m. Если m получается дробным, его округляют до условного числа и находят новое значение  . Общие сопротивления на каждой ступени:
. Общие сопротивления на каждой ступени:
![]()
![]()
……………………….
![]()
![]()
Величины сопротивлений, отключаемых на каждой ступени находятся как разность полных сопротивлений:
![]()
![]()
……………………………………….
![]()
Величины l и m могут быть представлены и иначе. Т. к. при Ф=const, i=m, то выражая сопротивления в относительных единицах, получим:
 т. к.
т. к.  и
и 
Порядок расчета сопротивлений аналогичен вышеизложенному.
Производим и продаем частотные преобразователи: Цены на преобразователи частоты(21.01.16г.): Частотники одна фаза в три: Модель Мощность Цена CFM110 0.25кВт 2300грн CFM110 0.37кВт 2400грн CFM110 0.55кВт 2500грн CFM210 1,0 кВт 3200грн …
В большинстве случаев к. з. АД питается от сети с U1=const и f1=const. Поэтому нелинейность их механических характеристик проявляется полностью как в режимах пуска, так и торможения. Магнитный поток в …
Обычно ДНВ работает при Ф=Фн если U=const или U=var. Необходимость ослабления потока возникает когда требуется получить скорость, превышающую основную (согласно требованиям технологического процесса ). Если бы поток изменялся мгновенно, то …
Расчетные формулы параметров машин постоянного тока
В таблице 1 представлены расчетные формулы для определения основных параметров машин постоянного тока.
В данной таблице собраны все формулы, которые касаются расчета параметров машин постоянного тока.
Таблица 1 — Расчетные формулы для определения основных параметров машин постоянного тока
| Наименование величин | Формулы | Принятые обозначения |
|---|---|---|
| Мощность, кВт |
|
I – ток машины, А; U – внешнее напряжение, В; |
| Ток генератора и двигателя, А |
|
Iа – ток якоря; Iв – ток параллельной обмотки возбуждения, А; |
| Внешнее напряжение, В |
|
∑Ra – сумма сопротивлений якорной цепи, Ом; Е – ЭДС машины, В; |
| ЭДС, В |
|
N – число проводников обмотки якоря; а – число пар параллельных ветвей в обмотке якоря; р – число пар полюсов; n – скорость вращения, об/мин. |
| Сопротивление якорной цепи, Ом |
|
Ф – магнитный поток пары полюсов, вебер; Rя, Rс, Rдоб. – сопротивления обмотки якоря, последовательной обмотки возбуждения и добавочных полюсов, Ом |
| Ориентировочной значение сопротивления цепи якоря, Ом |
|
Значение коэффициента β двигателей различного типа возбуждения: для независимого и параллельного возбуждения β=0,5; для смешанного β=0,6; для последовательного β=0,75; |
| КПД двигателя и генератора |
|
∑∆Р – суммарные потери в машине, кВт; |
| Суммарные потери, кВт |
|
∆Рх – потери холостого хода машины или постоянные потер, кВт; ∆Рв – потери на возбуждение, кВт; ∆Рмех. – механические потери на трение в подшипниках и о коллектор, кВт; ∆Рст. – магнитные потери в стали якоря, кВт; ∆Рвент. – вентиляционные потери, кВт; ∆Рдоб. – добавочные потери. В некомпенсированных машинах ∆Рдоб. = 1%Рном, в компенсированных 0,5%, кВт; kз – коэффициент загрузки; ∆Uщ = 2 В для графитных щеток; ∆Uщ = 0,6 В для металлографитных; |
| Переменные потери |
|
|
| Номинальный вращающий момент, кГм |
|
См – конструктивная постоянная момента; Ф – магнитный поток, вебер; |
| Расчетные коэффициенты для двигателя параллельного возбуждения |
|
|
| Скоростная характеристика двигателя |
|
|
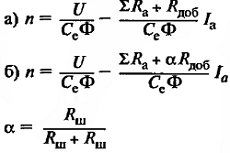
| Искусственные скоростные характеристики |
|
а) искусственная скоростная характеристика при введении добавочного сопротивления Rдоб. последовательно в цепь якоря; б) искусственная скоростная характеристика двигателя при шунтировании якоря двигателя сопротивлением Rш; α – коэффициент шунтирования. |



Литература:
1. Справочная книга электрика. В.И. Григорьева, 2004 г.
Всего наилучшего! До новых встреч на сайте Raschet.info.
КПД генератора, параметры машин постоянного тока, ток генератора, ЭДС
Благодарность:
Если вы нашли ответ на свой вопрос и у вас есть желание отблагодарить автора статьи за его труд, можете воспользоваться платформой для перевода средств «WebMoney Funding» и «PayPal».
Данный проект поддерживается и развивается исключительно на средства от добровольных пожертвований.
Проявив лояльность к сайту, Вы можете перечислить любую сумму денег, тем самым вы поможете улучшить данный сайт, повысить регулярность появления новых интересных статей и оплатить регулярные расходы, такие как: оплата хостинга, доменного имени, SSL-сертификата, зарплата нашим авторам.
