Теорема о среднем.
Если f(x) непрерывна на отрезке [a,b], то
существует точка
![]() ,
,
такая что .
.
Док-во. Функция, непрерывная на отрезке,
принимает на этом отрезке своё наименьшее
m и наибольшее M значения. Тогда
 .
.
Число заключено
заключено
между минимальным и максимальным
значениями функции на отрезке. Одно из
свойств функции, непрерывной на отрезке,
заключается в том, что эта функция
принимает любое значение, расположенное
между m и M. Таким образом, существует
точка![]() ,
,
такая что .
.
Это свойство имеет простую геометрическую
интерпретацию: если![]() непрерывна
непрерывна
на отрезке [a,b], то существует точка![]() такая,
такая,
что площадь криволинейной трапеции
ABCD равна площади прямоугольника с
основанием [a,b] и высотой f(c) (на рисунке
выделен цветом).
7. Интеграл с переменным верхним пределом. Его непрерывность и дифференцируемость.
Рассмотрим функцию
f (x), интегрируемую по Риману на отрезке
[a, b]. Раз она интегрируема на [a, b], то она
также интегрируема на [a, x] ∀x
∈
[a, b]. Тогда при каждом x ∈
[a, b] имеет смысл выражение
![]() ,
,
и при каждом x оно равно некоторому
числу.
Таким образом,
каждому x ∈
[a, b] поставлено в соответствие некоторое
число
![]() ,
,
т.е. на [a, b] задана
функция:
![]()
(3.1)
Определение:
Функция F (x), заданная
в (3.1), а также само выражение
![]() называется
называется
интегралом с
переменным верхним пределом. Она
определена на всем отрезке [a, b]
интегрируемости
функции f (x).
Теорема:
Условие: f (t)
непрерывна на [a, b], а функция F (x) задана
формулой (3.1).
Утверждение: Функция
F(x) дифференцируема на [a, b], причем F (x)
= f (x).
(В точке a она
дифференцируема справа, а в точке b –
слева.)
Доказательство:
Поскольку для
функции одной переменной F (x)
дифференцируемость равносильна
существованию производной во всех
точках (в точке a справа, а в точке b –
слева), то мы найдем производную F (x).
Рассмотрим разность
![]()
Таким образом,
![]() ,
,
при этом точка ξ
лежит на отрезке [x, x + ∆x] (или [x + ∆x, x]
если ∆x < 0).
Теперь вспомним,
что производная функции F(x) в заданной
точке x ∈
[a, b] равна пределу разностного отношения:
![]() .
.
Из равенства имеем:
![]() ,
,
![]()
![]()
Устремляя теперь
∆x →
0, в левой части данного равенства получим
F’(x), a в правой
![]()
Вспомним определение
непрерывности функции f (t) в точке x:
![]()
![]()
![]()
Пусть x1 в этом
определении равен ξ. Поскольку ξ ∈
[x + ∆x, x] (ξ ∈
[x, x + ∆x]), а
∆x →
0, то |x − ξ| →
0, и по определению непрерывности, f (ξ)
→
f (x). Отсюда имеем:
F’(x) = f (x).
Следствие:
Условие: f (x)
непрерывна на [a, b].
Утверждение: Любая
первообразная функции f (x) имеет вид
![]()
где C
∈
R – некоторая константа.
Доказательство.
По теореме 3.1 функция
![]()
является
первообразной для
f(x). Предположим,
что G(x) – другая первообразная f (x).
Тогда G’(x) = f(x) и для функции F(x) − G(x)
имеем: (F
(x) + G(x))’ = F’(x)−G’(x) = f (x)−f(x) ≡
0. Значит, производная функции F (x)−G(x)
равна нулю,
следовательно, эта функция есть
постоянная: F(x) − G(x) = const.
8. Формула Ньютона-Лейбница для определенного интеграла.
Теорема:
Условие:
f(t) непрерывна на [a, b], а F(x) ее любая
первообразная.
Утверждение:
![]()
Доказательство:
Рассмотрим некоторую первообразную F
(x) функции f (x). По Следствию из Теоремы
«О дифференцируемости интеграла с
переменным верхним пределом» (см.
предыдущий вопрос) она имеет вид
![]() .
.
Отсюда
![]() =>
=>
c=F(a),
и
![]() .
.
Перенесем F(a) в
последнем равенстве в левую часть,
переобозначим переменную интегрирования
снова через x и получим формулу Ньютона
– Лейбница:
![]()
I. ОцеНКа интеграла. Укажем граНИцы, между которыми наверняка заключено значение интеграла.
Теорема VI (об оценке определенного интеграла). Значение определенного интеграла заключено между произведениями наименьшего и наибольшего значений подынтегральной функции на длину интервала интегрирования, т. Е.
![]()
Где Т и М — Соответственно наименьшее и наибольшее значения функции ![]() интервале
интервале ![]() :
:
![]()
Доказательство. Возьмем две функции ![]() и
и ![]() . Первая из них в интервале
. Первая из них в интервале ![]() неотрицательна, вторая неположительна. Значит, по теореме V
неотрицательна, вторая неположительна. Значит, по теореме V
![]() и
и ![]()
А по теореме I
![]() и
и ![]()
Откуда в силу того, что ![]()
![]()
И
![]()
Что и требовалось доказать.
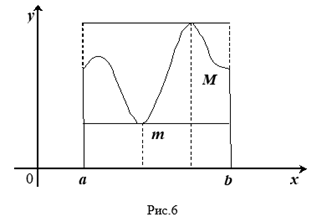
Геометрический смысл этих неравенств таков: площадь КриволиНейной трапеции больше площади прямоугольника с основанием, РавНой оснОваНИЮ трапеции, и высотой, равной наименьшей ординате ТрапециИ, и меньше площади прямоугольника с тем же основанием и Высотой, равной наибольшей ординате Трапеции (рис. 6).
Находя границы для интеграла, мы, как говорят, производим его оценку. Может случиться, что весьма трудно или дажЕ невозможно найти точное значение Интеграла, а оценивая его, мы узнаем, ХотЯ бы грубо, приближенное его Значение. С такого, рода оценками приходится Довольно часто встречаться в математике.
УказаННые в теореме VI границы для Интеграла тем более точны, чем короче Интервал интегрирования и чем меньше линия ![]() отличается По положению от прямой, параллельной оси Ох.
отличается По положению от прямой, параллельной оси Ох.
Пример. Оценим интеграл 
Легко проверить, что подынтегральная функция в интервале ![]() убывает и, следовательно,
убывает и, следовательно,
Т. е. 
Таким образом, интеграл заключен между 0,5 и 0,71, что дает нам право считать его равным 0,6 с точностью до 0,1. Более точные приемы показывают, что приближенно он равен 0,62.
II. Обобщение теоремы об оценке интеграла. Интегрирование неравенств.
Справедлива следующая более общая теорема, чем теорема VI:
Теорема VII. Если в каждой точке Х интервала ![]()
![]()
То ![]()
Это значит, что неравенство между функциями влечет неравенство того же смысла между их определенными интегралами, или, говоря коротко, Неравенства можно интегрировать..
На доказательстве и геометрическом смысле теоремы останавливаться не будем, так как они вполне подобны предыдущим.
В частном случае, когда ![]() тождественно равно М, а
тождественно равно М, а ![]() тождественно равно Т, получаем теорему VI.
тождественно равно Т, получаем теорему VI.
III. Теорема о среднем.
Определенный интеграл обладает следующим важным свойством:
Теорема VIII (о среднем). Внутри интервала интегрирования ![]() существует, по меньшей мере, одно значение
существует, по меньшей мере, одно значение ![]() для которого
для которого
 . (*)
. (*)
Доказательство. В силу теоремы VI имеем:
И, значит,

Где M — некоторое число, заключенное между наименьшим (Т) и наибольшим (М) значениями функции ![]() в интервале
в интервале ![]() , Т. Е.
, Т. Е. ![]() . Но
. Но ![]() , будучи непрерывной функцией, обязательно принимает, по меньшей мере, один раз каждое значение, лежащее между Т и М. Следовательно, при некотором
, будучи непрерывной функцией, обязательно принимает, по меньшей мере, один раз каждое значение, лежащее между Т и М. Следовательно, при некотором ![]() получит значение, равное M, т. е.
получит значение, равное M, т. е. ![]() (см. рис. 6), что и требовалось доказать.
(см. рис. 6), что и требовалось доказать.
Из равенства (*) находим:
![]()
Эта формула позволяет теорему о среднем высказать в такой форме:
ОпредЕЛенный интеграл от непрерывной функции, равен произведению значения этой функции в некоторой промежуточной точке интервала интегрирования, на длину интервала.
Дадим наглядное пояснение теоремы. При движении прямой, параллельной оси Ох (рис. 6), вверх от положения ВС площадь прямоугольника АВСК будет непрерывно возрастать от величины, меньшей площади трапеции, до величины, большей ее. Очевидно, при некотором промежуточном положении прямой — обозначим его через FG — Площадь прямоугольника AFGK окажется в точности равной площади трапеции S. Так как при ЭТом движении прямая постоянно пересекает линию, ограничивающую трапецию, то и в положении FG найдется одна или несколько (на рис.
7 две)
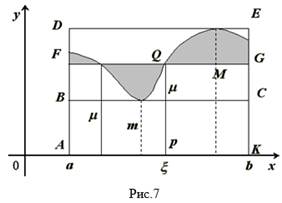
Точек пересечения Q; абсцисса любой точки пересечения и будет требуемым по теореме значением X.
Если трапецию ограничивает прямая линия, то ![]() ; отрезок PQ будет при этом средней линией прямолинейной трапеции.
; отрезок PQ будет при этом средней линией прямолинейной трапеции.
IV. Среднее арифметическое значение функции. Значение ![]() , находимое по теореме о среднем, называется средним арифметическим значением функции
, находимое по теореме о среднем, называется средним арифметическим значением функции ![]() в интервале
в интервале ![]() .
.
Определение. Средним арифметическИМ значением ![]() непрерывной функции
непрерывной функции ![]() в интервале
в интервале ![]() называется отношение определенного интеграла от этой функции к длиНЕ интервала:
называется отношение определенного интеграла от этой функции к длиНЕ интервала:

Приведем некоторые соображения в обоснование этого определения.
Пусть некоторая величина У принимает П значений: ![]() Средним арифметическим значением этой величины называется частное
Средним арифметическим значением этой величины называется частное ![]() . ТаК если температура воздуха в течение суток измеряется через каждый час, то средней температурой будет частное от деления суммы всех наблюденных температур на 24.
. ТаК если температура воздуха в течение суток измеряется через каждый час, то средней температурой будет частное от деления суммы всех наблюденных температур на 24.
Но представим себе теперь, что величина изменяется непрерывно (например, температура воздуха известна в любой момент суток) и мы хотим как-то в среднем охарактеризовать всю совокупность ее значений. Как в этом случае следует определить среднюю температуру воздуха, принимая во внимание всю известную совокупность знАЧений температуры? Вообще, ЧтО следует принять в качестве среднего значения неПРерывной фуНКции ![]() в некотором интервале
в некотором интервале ![]() ?
?
Разобьем интервал ![]() на П равных частей с помощью точек
на П равных частей с помощью точек ![]() и возьмем значения функции в этих N точках:
и возьмем значения функции в этих N точках:
![]()
Значениями нашей функции во всех остальных точках интервала пока пренебрежем. Возьмем среднее арифметическое ![]() указанных значений:
указанных значений:
![]()
Ясно, что чем больше П, тем больше значений функции учитывается при отыскании среднего значения, и поэтому естественно за среднее значение ![]() функции принять предел, к которому стремится
функции принять предел, к которому стремится ![]() При
При ![]() . Найдем этот предел.
. Найдем этот предел.
Умножив и разделив выражение для ![]() на
на ![]() , получим:
, получим:
![]()
Но так как ![]() То
То
![]()
ОТкуда, переходя к пределу, получаем указанное нами выше выражение для среднего значения:
![]()
На основании теоремы о среднем (теорема VIII) мы заключаем, ЧТо ![]() , где
, где ![]() , т. Е. что среднее значение непрерывной функции в интервале всегда (если только функция не постоянная) меньше некоторых ее значений, больше других ее значений и равно по меньшей мере одному ее значению.
, т. Е. что среднее значение непрерывной функции в интервале всегда (если только функция не постоянная) меньше некоторых ее значений, больше других ее значений и равно по меньшей мере одному ее значению.
Понятие среднего значения функции очень употребительно в техНИке. Многие величины часто характеризуются своими средними значениями; таковы, например, давление пара, сила и напряжение переменного тока, скорость химической реакции и т. п.
| < Предыдущая | Следующая > |
|---|
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 19 мая 2018 года; проверки требует 1 правка.
Первая теорема о среднем значении — одна из теорем об определённом интеграле.
Формулировка[править | править код]
Пусть функция  интегрируема на отрезке
интегрируема на отрезке ![[a;b]](https://wikimedia.org/api/rest_v1/media/math/render/svg/68e776d74130a8890a814c1f4e74372a9110d2f9) , и ограничена на нём числами
, и ограничена на нём числами  и
и  так, что
так, что  .
.
Тогда существует такое число  ,
,  , что
, что
 .
.

Доказательство[править | править код]
Из неравенства по свойству монотонности интеграла имеем
- .

Обозначив  , получим требуемое утверждение.
, получим требуемое утверждение.
Так определённое число называют средним значением функции на отрезке , откуда и название теоремы.
Замечание[править | править код]
Если функция непрерывна на , то в качестве и
можно взять её наибольшее и наименьшее значения (которые, по теореме Вейерштрасса, достигаются),
тогда по теореме о промежуточном значении существует такая точка ![cin [a;b]](https://wikimedia.org/api/rest_v1/media/math/render/svg/02b8df5ba00bbc02820be401c0dbc93d73392da8) , что
, что  ,
,
поэтому утверждение теоремы можно переписать в виде
- .

Если воспользоваться формулой Ньютона-Лейбница, то это равенство запишется как
- ,

где  — первообразная функции , что есть не что иное, как формула Лагранжа для функции .
— первообразная функции , что есть не что иное, как формула Лагранжа для функции .
Обобщение[править | править код]
Пусть функции и  интегрируемы на отрезке , причём по-прежнему ,
интегрируемы на отрезке , причём по-прежнему ,
а вторая из них не меняет знак (то есть либо всюду неотрицательна:  , либо всюду неположительна
, либо всюду неположительна  ).
).
Тогда существует такое число , , что
- .

Доказательство[править | править код]
Пусть неотрицательна, тогда имеем
- ,

откуда, ввиду монотонности интеграла
- .

Если  , то из этого неравенства следует, что
, то из этого неравенства следует, что  ,
,
и утверждение теоремы выполняется при любом .
В противном случае положим
- .

Обобщение доказано. Если функция непрерывна, можно утверждать, что существует точка такая, что

(аналогично предыдущему).
Литература[править | править код]
- Фихтенгольц Г. М. Курс дифференциального и интегрального исчисления. — М.: Наука, 1969. — Т. II.
- Зорич В. А. Математический анализ. Ч. I. — М.: Наука, 1981.
5.
Оценка интеграла. Теорема о среднем
Укажем границы, между которыми наверняка заключено значение интеграла.
Теорема 7. (об
оценке
определенного
интеграла).
Значение
определенного
интеграла заключено между произведениями наименьшего и наибольшего значений
подынтегральной функции на длину интервала интегрирования, т. е.
Z b
m(b − a) ≤
f (x)dx ≤ M (b − a), a < b,
a
где m и M — соответственно наименьшее и наибольшее значения функции f (x) в
интервале [а,b]:
m ≤ f (x) ≤ M.
Доказательство. Возьмем две функции M − f (x) и m − f (x) . Первая из них в
интервале [a, b] неотрицательна, вторая неположительна. Значит, по теореме 6
Z b
Z b
[M − f (x)]dx ≥ 0,
[m − f ()]dx ≤ 0.
a
a
Применяя теоремы п. 3 и формулу
Rb
dx = b − a , получим
a
Z
Z
b
M (b − a) ≥
b
f (x)dx и m(b − a) ≤
a
f (x)dx.
a
что и требовалось доказать. Из доказательства теоремы 6 следует, что если только
функция f (x) не постоянная, то нестрогие неравенства можно заменить на строгие:
Z b
m(b − a) <
f (x)dx < M (b − a).
a
Находя границы для интеграла, мы, как говорят, производим его оценку. Может
случиться, что весьма трудно или даже невозможно найти точное значение интеграла,
а оценивая его, мы узнаем, хотя бы грубо, приближенное его значение. С такого рода
оценками приходится довольно часто встречаться в математике.
Указанные в теореме 7 границы для интеграла тем более точны, чем короче интервал
интегрирования и чем меньше линия y = f (x) отличается по положению от прямой,
параллельной оси Ox .
Пример 1. Оценим интеграл
Z 2
5−x
dx.
2
0 9−x
Известными методами дифференциального исчисления находим, что наибольшее и
наименьшее значения подынтегральной функции в интервале [0,2] равны соответственно
y(2) = 0, 6 и y(2) = 0, 5 . Значит,
Z 2
5−x
dx < 0, 6(2 − 0),
0, 5(2 − 0) <
2
0 9−x
1
т. е. интеграл заключен между 1 и 1,2. Если считать, что он равен 1,1, то предельная
абсолютная ошибка равна 0,1, а относительная — 9%. Позже мы сумеем найти точное
значение приведенного интеграла. Оно равно 4/3 · ln 5 − ln 3 ≈ 1, 047 .
Пример 2. Оценим интеграл
Z π/2
sin x
dx.
x
π/4
Легко проверить, что подынтегральная функция в интервале [π/4, π/2] убывает и,
следовательно,
Z π/2
sin(π/2) π
sin x
sin(π/4) π
<
dx <
π/2 4
x
π/4 4
π/4
т. е.
√
Z π/2
1
sin x
2
<
dx <
.
2
x
2
π/4
Таким образом, интеграл заключен между 0,5 и 0,71, что дает нам право считать его
равным 0,6 с точностью до 0,1. Более точные приемы показывают, что приближенно он
равен 0,62.
Обобщение теоремы об оценке интеграла.
Интегрирование неравенств
Справедлива следующая более общая теорема, чем теорема 7.
Теорема 8. Если в каждой точке x интервала [a, b]
ψ(x) ≤ f (x) ≤ φ(x),
то
Z
Z
b
ψ(x)dx ≤
a
Z
b
b
f (x)dx ≤
a
φ(x)dx.
a
Это значит, что неравенство между функциями влечет неравенство того же
смысла между их определенными интегралами, или, говоря коротко, неравенства
можно интегрировать. Понятно хотя бы из простых геометрических соображений, что
дифференцирование неравенства может привести к нелепым результатам.
Доказательство теоремы немедленно следует из применения к неравенствам f (x) −
φ() ≤ 0 и f (x)−ψ(x) ≥ 0 теоремы 7 о знаке интеграла. Опять-таки знак равенства между
интегралами возможен только тогда, когда функции тождественно равны между собой.
В частном случае, когда φ(x) тождественно равно M , а ψ(x) тождественно равно
m , получаем теорему 7.
С помощью теоремы 8 легко получается важное неравенство, которым мы
воспользуемся в дальнейшем. При любом x
−|f (x)| ≤ f (x) ≤ |f (x)|.
(Если f (x) > 0 , то правая часть неравенства превращается в равенство, а левая часть
очевидна; если f (x) < 0 , то наоборот.) Тогда
Z b
Z b
Z b
−
|f (x)|dx ≤
f (x)dx ≤
|f (x)|dx,
a
a
a
2
или
Z
Z
b
|
b
f (x)dx| ≤
a
|f (x)|dx.
a
Модуль интеграла не превосходит интеграла от модуля функции. Предоставляем
читателю выяснить геометрический смысл этого неравенства. Напомним еще, что
аналогичное неравенство имеет место и для сумм: модуль суммы не превосходит суммы
модулей.
Теорема о среднем
Определенный интеграл обладает следующим важным свойством.
Теорема 9. (о среднем). Пусть функция f (x) непрерывна в замкнутом интервале [а,b].
Тогда внутри этого интервала существует хотя бы одно значение x = ξ , для которого
Rb
f (x)dx
a
= f (ξ).
(1)
b−a
Доказательство. Если функция f (x) постоянная, то формула (1) очевидна, причем
ξ — любая точка интервала [а,b]. Пусть теперь f (x) не постоянная, тогда в силу теоремы 7
имеем
Rb
f (x)dx
m< a
< M,
b−a
и, значит,
Rb
f (x)dx
a
= µ,
b−a
где µ — некоторое число, заключенное между наименьшим (m) и наибольшим (M )
значениями функции f (x) в интервале [a, b] .
В силу свойств непрерывных функций функция f (x) в каких-то двух точках
интервала [a, b] принимает значения m и и в какой-то точке, лежащей между ними,
принимает промежуточное значение µ . Значит, существует точка ξ ∈ (a, b) , в которой
f (ξ) = µ . Теорема доказана.
Из равенства (1) находим
Z
b
f (x)dx = f (ξ)(b − a), ξ ∈ (a, b).
a
Эта формула позволяет теорему о среднем сформулировать в такой форме:
Определенный интеграл от непрерывной функции равен произведению значения этой
функции в некоторой промежуточной точке интервала интегрирования на длину
интервала.
Среднее арифметическое значение функции
Определение 1. Средним арифметическим значением непрерывной функции y =
f (x) в интервале [а,b] называется отношение определенного интеграла от этой
функции к длине интервала:
Rb
f (x)dx
.
yc = a
b−a
3
На основании теоремы о среднем заключаем, что yc = f (ξ) , где ξ ∈ (a, b) . Среднее
значение непрерывной функции в замкнутом интервале всегда (если только функция не
постоянная) меньше некоторых ее значений, больше других ее значений и равно хотя бы
одному ее значению.
Понятие среднего значения функции очень употребительно в технике. Многие
величины часто характеризуются своими средними значениями, например: давление пара,
мощность переменного тока, скорость химической реакции и т. п.
4

In mathematics, the mean value theorem (or Lagrange theorem) states, roughly, that for a given planar arc between two endpoints, there is at least one point at which the tangent to the arc is parallel to the secant through its endpoints. It is one of the most important results in real analysis. This theorem is used to prove statements about a function on an interval starting from local hypotheses about derivatives at points of the interval.
More precisely, the theorem states that if  is a continuous function on the closed interval
is a continuous function on the closed interval ![[a,b]](https://wikimedia.org/api/rest_v1/media/math/render/svg/9c4b788fc5c637e26ee98b45f89a5c08c85f7935) and differentiable on the open interval
and differentiable on the open interval  , then there exists a point
, then there exists a point  in such that the tangent at is parallel to the secant line through the endpoints
in such that the tangent at is parallel to the secant line through the endpoints  and
and  , that is,
, that is,

History[edit]
A special case of this theorem for inverse interpolation of the sine was first described by Parameshvara (1380–1460), from the Kerala School of Astronomy and Mathematics in India, in his commentaries on Govindasvāmi and Bhāskara II.[1] A restricted form of the theorem was proved by Michel Rolle in 1691; the result was what is now known as Rolle’s theorem, and was proved only for polynomials, without the techniques of calculus. The mean value theorem in its modern form was stated and proved by Augustin Louis Cauchy in 1823.[2] Many variations of this theorem have been proved since then.[3][4]
Formal statement[edit]

The function attains the slope of the secant between  and
and  as the derivative at the point
as the derivative at the point  .
.

It is also possible that there are multiple tangents parallel to the secant.
Let ![{displaystyle f:[a,b]to mathbb {R} }](https://wikimedia.org/api/rest_v1/media/math/render/svg/b592d102ccd1ba134d401c5b3ea177baaba3ffac) be a continuous function on the closed interval , and differentiable on the open interval , where
be a continuous function on the closed interval , and differentiable on the open interval , where  . Then there exists some in such that
. Then there exists some in such that
The mean value theorem is a generalization of Rolle’s theorem, which assumes  , so that the right-hand side above is zero.
, so that the right-hand side above is zero.
The mean value theorem is still valid in a slightly more general setting. One only needs to assume that is continuous on , and that for every  in the limit
in the limit

exists as a finite number or equals  or
or  . If finite, that limit equals
. If finite, that limit equals  . An example where this version of the theorem applies is given by the real-valued cube root function mapping
. An example where this version of the theorem applies is given by the real-valued cube root function mapping  , whose derivative tends to infinity at the origin.
, whose derivative tends to infinity at the origin.
Note that the theorem, as stated, is false if a differentiable function is complex-valued instead of real-valued. For example, define  for all real . Then
for all real . Then

while  for any real .
for any real .
These formal statements are also known as Lagrange’s Mean Value Theorem.[5]
Proof[edit]
The expression  gives the slope of the line joining the points
gives the slope of the line joining the points  and
and  , which is a chord of the graph of , while gives the slope of the tangent to the curve at the point
, which is a chord of the graph of , while gives the slope of the tangent to the curve at the point  . Thus the mean value theorem says that given any chord of a smooth curve, we can find a point on the curve lying between the end-points of the chord such that the tangent of the curve at that point is parallel to the chord. The following proof illustrates this idea.
. Thus the mean value theorem says that given any chord of a smooth curve, we can find a point on the curve lying between the end-points of the chord such that the tangent of the curve at that point is parallel to the chord. The following proof illustrates this idea.
Define  , where
, where  is a constant. Since is continuous on and differentiable on , the same is true for
is a constant. Since is continuous on and differentiable on , the same is true for  . We now want to choose so that satisfies the conditions of Rolle’s theorem. Namely
. We now want to choose so that satisfies the conditions of Rolle’s theorem. Namely

By Rolle’s theorem, since is differentiable and  , there is some in for which
, there is some in for which  , and it follows from the equality that,
, and it follows from the equality that,

Implications[edit]
Theorem 1: Assume that f is a continuous, real-valued function, defined on an arbitrary interval I of the real line. If the derivative of f at every interior point of the interval I exists and is zero, then f is constant in the interior.
Proof: Assume the derivative of f at every interior point of the interval I exists and is zero. Let (a, b) be an arbitrary open interval in I. By the mean value theorem,[6] there exists a point c in (a, b) such that

This implies that f(a) = f(b). Thus, f is constant on the interior of I and thus is constant on I by continuity. (See below for a multivariable version of this result.)
Remarks:
- Only continuity of f, not differentiability, is needed at the endpoints of the interval I. No hypothesis of continuity needs to be stated if I is an open interval, since the existence of a derivative at a point implies the continuity at this point. (See the section continuity and differentiability of the article derivative.)
- The differentiability of f can be relaxed to one-sided differentiability, a proof given in the article on semi-differentiability.
Theorem 2: If f’ (x) = g’ (x) for all x in an interval (a, b) of the domain of these functions, then f – g is constant, i.e. f = g + c where c is a constant on (a, b).
Proof: Let F = f − g, then F’ = f’ − g’ = 0 on the interval (a, b), so the above theorem 1 tells that F = f − g is a constant c or f = g + c.
Theorem 3: If F is an antiderivative of f on an interval I, then the most general antiderivative of f on I is F(x) + c where c is a constant.
Proof: It directly follows from the theorem 2 above.
Cauchy’s mean value theorem[edit]
Cauchy’s mean value theorem, also known as the extended mean value theorem,[7] is a generalization of the mean value theorem. It states: if the functions and are both continuous on the closed interval and differentiable on the open interval , then there exists some  , such that[5]
, such that[5]

Geometrical meaning of Cauchy’s theorem

Of course, if  and
and  , this is equivalent to:
, this is equivalent to:

Geometrically, this means that there is some tangent to the graph of the curve[8]
![{displaystyle {begin{cases}[a,b]to mathbb {R} ^{2}\tmapsto (f(t),g(t))end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/035d912ebe2e72e28cf8922a39d1b07ee8afe321)
which is parallel to the line defined by the points  and
and  . However, Cauchy’s theorem does not claim the existence of such a tangent in all cases where and are distinct points, since it might be satisfied only for some value with
. However, Cauchy’s theorem does not claim the existence of such a tangent in all cases where and are distinct points, since it might be satisfied only for some value with  , in other words a value for which the mentioned curve is stationary; in such points no tangent to the curve is likely to be defined at all. An example of this situation is the curve given by
, in other words a value for which the mentioned curve is stationary; in such points no tangent to the curve is likely to be defined at all. An example of this situation is the curve given by

which on the interval ![[-1,1]](https://wikimedia.org/api/rest_v1/media/math/render/svg/51e3b7f14a6f70e614728c583409a0b9a8b9de01) goes from the point
goes from the point  to
to  , yet never has a horizontal tangent; however it has a stationary point (in fact a cusp) at
, yet never has a horizontal tangent; however it has a stationary point (in fact a cusp) at  .
.
Cauchy’s mean value theorem can be used to prove L’Hôpital’s rule. The mean value theorem is the special case of Cauchy’s mean value theorem when  .
.
Proof of Cauchy’s mean value theorem[edit]
The proof of Cauchy’s mean value theorem is based on the same idea as the proof of the mean value theorem.
Generalization for determinants[edit]
Assume that  and
and  are differentiable functions on that are continuous on . Define
are differentiable functions on that are continuous on . Define
-

The mean value theorem displayed on a bridge in Beijing


There exists such that  .
.
Notice that

and if we place  , we get Cauchy’s mean value theorem. If we place and
, we get Cauchy’s mean value theorem. If we place and  we get Lagrange’s mean value theorem.
we get Lagrange’s mean value theorem.
The proof of the generalization is quite simple: each of  and
and  are determinants with two identical rows, hence
are determinants with two identical rows, hence  . The Rolle’s theorem implies that there exists such that .
. The Rolle’s theorem implies that there exists such that .
Mean value theorem in several variables[edit]
The mean value theorem generalizes to real functions of multiple variables. The trick is to use parametrization to create a real function of one variable, and then apply the one-variable theorem.
Let  be an open subset of
be an open subset of  , and let
, and let  be a differentiable function. Fix points
be a differentiable function. Fix points  such that the line segment between
such that the line segment between  lies in , and define
lies in , and define  . Since is a differentiable function in one variable, the mean value theorem gives:
. Since is a differentiable function in one variable, the mean value theorem gives:

for some between 0 and 1. But since  and
and  , computing
, computing  explicitly we have:
explicitly we have:

where  denotes a gradient and
denotes a gradient and  a dot product. Note that this is an exact analog of the theorem in one variable (in the case
a dot product. Note that this is an exact analog of the theorem in one variable (in the case  this is the theorem in one variable). By the Cauchy–Schwarz inequality, the equation gives the estimate:
this is the theorem in one variable). By the Cauchy–Schwarz inequality, the equation gives the estimate:

In particular, when the partial derivatives of are bounded, is Lipschitz continuous (and therefore uniformly continuous).
As an application of the above, we prove that is constant if the open subset is connected and every partial derivative of is 0. Pick some point  , and let
, and let  . We want to show
. We want to show  for every
for every  . For that, let
. For that, let  . Then E is closed and nonempty. It is open too: for every
. Then E is closed and nonempty. It is open too: for every  ,
,

for every  in some neighborhood of . (Here, it is crucial that and are sufficiently close to each other.) Since is connected, we conclude
in some neighborhood of . (Here, it is crucial that and are sufficiently close to each other.) Since is connected, we conclude  .
.
The above arguments are made in a coordinate-free manner; hence, they generalize to the case when is a subset of a Banach space.
Mean value theorem for vector-valued functions[edit]
There is no exact analog of the mean value theorem for vector-valued functions (see below). However, there is an inequality which can be applied to many of the same situations to which the mean value theorem is applicable in the one dimensional case:[9]
The theorem follows from the mean value theorem. Indeed, take  . Then
. Then  is real-valued and thus, by the mean value theorem,
is real-valued and thus, by the mean value theorem,

for some . Now,  and
and  Hence, using the Cauchy–Schwarz inequality, from the above equation, we get:
Hence, using the Cauchy–Schwarz inequality, from the above equation, we get:

If  , the theorem is trivial (any c works). Otherwise, dividing both sides by
, the theorem is trivial (any c works). Otherwise, dividing both sides by  yields the theorem.
yields the theorem. 
Jean Dieudonné in his classic treatise Foundations of Modern Analysis discards the mean value theorem and replaces it by mean inequality (which is given below) as the proof is not constructive and one cannot find the mean value and in applications one only needs mean inequality. Serge Lang in Analysis I uses the mean value theorem, in integral form, as an instant reflex but this use requires the continuity of the derivative. If one uses the Henstock–Kurzweil integral one can have the mean value theorem in integral form without the additional assumption that derivative should be continuous as every derivative is Henstock–Kurzweil integrable.
The reason why there is no analog of mean value equality is the following: If f : U → Rm is a differentiable function (where U ⊂ Rn is open) and if x + th, x, h ∈ Rn, t ∈ [0, 1] is the line segment in question (lying inside U), then one can apply the above parametrization procedure to each of the component functions fi (i = 1, …, m) of f (in the above notation set y = x + h). In doing so one finds points x + tih on the line segment satisfying

But generally there will not be a single point x + t*h on the line segment satisfying

for all i simultaneously. For example, define:
![{displaystyle {begin{cases}f:[0,2pi ]to mathbb {R} ^{2}\f(x)=(cos(x),sin(x))end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/537a6776144419319a90c743f3bfa85384551b8e)
Then  , but
, but  and
and  are never simultaneously zero as ranges over
are never simultaneously zero as ranges over ![{displaystyle left[0,2pi right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ecbccc3195ac7ed59d31ec366dbd75739b85e1d3) .
.
The above theorem implies the following:
In fact, the above statement suffices for many applications and can be proved directly as follows. (We shall write for  for readability.) First assume is differentiable at too. If
for readability.) First assume is differentiable at too. If  is unbounded on , there is nothing to prove. Thus, assume
is unbounded on , there is nothing to prove. Thus, assume  . Let
. Let  be some real number. Let
be some real number. Let

We want to show  . By continuity of , the set
. By continuity of , the set  is closed. It is also nonempty as
is closed. It is also nonempty as  is in it. Hence, the set has the largest element
is in it. Hence, the set has the largest element  . If
. If  , then and we are done. Thus suppose otherwise. For
, then and we are done. Thus suppose otherwise. For  ,
,

Let  be such that
be such that  . By the differentiability of at
. By the differentiability of at  (note may be 0), if
(note may be 0), if  is sufficiently close to , the first term is
is sufficiently close to , the first term is  . The second term is
. The second term is  . The third term is
. The third term is  . Hence, summing the estimates up, we get:
. Hence, summing the estimates up, we get:  , a contradiction to the maximality of . Hence,
, a contradiction to the maximality of . Hence,  and that means:
and that means:

Since is arbitrary, this then implies the assertion. Finally, if is not differentiable at , let  and apply the first case to restricted on
and apply the first case to restricted on ![{displaystyle [a',b]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a2199a20ce14a38267ad303f042837644e8feb46) , giving us:
, giving us:

since  . Letting
. Letting  finishes the proof.
finishes the proof.
For some applications of mean value inequality to establish basic results in calculus, see also Calculus on Euclidean space#Basic notions.
A certain type of generalization of the mean value theorem to vector-valued functions is obtained as follows: Let f be a continuously differentiable real-valued function defined on an open interval I, and let x as well as x + h be points of I. The mean value theorem in one variable tells us that there exists some t* between 0 and 1 such that

On the other hand, we have, by the fundamental theorem of calculus followed by a change of variables,

Thus, the value f′(x + t*h) at the particular point t* has been replaced by the mean value

This last version can be generalized to vector valued functions:
Proposition — Let U ⊂ Rn be open, f : U → Rm continuously differentiable, and x ∈ U, h ∈ Rn vectors such that the line segment x + th, 0 ≤ t ≤ 1 remains in U. Then we have:

where Df denotes the Jacobian matrix of f and the integral of a matrix is to be understood componentwise.
Proof. Let f1, …, fm denote the components of f and define:
![{displaystyle {begin{cases}g_{i}:[0,1]to mathbb {R} \g_{i}(t)=f_{i}(x+th)end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3578b3a55c366cbcab9cd1677a9f4e5720009492)
Then we have

The claim follows since Df is the matrix consisting of the components  .
.
The mean value inequality can then be obtained as a corollary of the above proposition (though under the assumption the derivatives are continuous).[11]
Cases where the theorem cannot be applied[edit]
Both conditions for the mean value theorem are necessary:
- f(x) is differentiable on (a,b)
- f(x) is continuous on [a,b]
Where one of the above conditions is not satisfied, the mean value theorem is not valid in general, and so it cannot be applied.
Function is differentiable on open interval a,b[edit]
The necessity of the first condition can be seen by the counterexample where the function  on [-1,1] is not differentiable.
on [-1,1] is not differentiable.
Function is continuous on closed interval a,b[edit]
The necessity of the second condition can be seen by the counterexample where the function ![{displaystyle f(x)={begin{cases}1,&{text{at }}x=0\0,&{text{if }}xin (0,1]end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0cb6e79196b3cfc68f23749dc33e5c9d7c878cfe)
satisfies criteria 1 since  on
on 
But not criteria 2 since  and
and  for all
for all  so no such exists
so no such exists

Mean value theorems for definite integrals[edit]
First mean value theorem for definite integrals[edit]
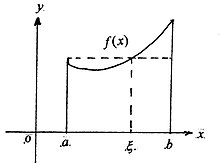
Geometrically: interpreting f(c) as the height of a rectangle and b–a as the width, this rectangle has the same area as the region below the curve from a to b[12]
Let f : [a, b] → R be a continuous function. Then there exists c in (a, b) such that

Since the mean value of f on [a, b] is defined as

we can interpret the conclusion as f achieves its mean value at some c in (a, b).[13]
In general, if f : [a, b] → R is continuous and g is an integrable function that does not change sign on [a, b], then there exists c in (a, b) such that

Proof that there is some c in [a, b][14][edit]
Suppose f : [a, b] → R is continuous and g is a nonnegative integrable function on [a, b]. By the extreme value theorem, there exists m and M such that for each x in [a, b], and ![{displaystyle f[a,b]=[m,M]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8e3c8c0b2601b0d35f20941e21d0d3812086e54b) . Since g is nonnegative,
. Since g is nonnegative,

Now let

If  , we’re done since
, we’re done since

means

so for any c in (a, b),

If I ≠ 0, then

By the intermediate value theorem, f attains every value of the interval [m, M], so for some c in [a, b]

that is,
Finally, if g is negative on [a, b], then

and we still get the same result as above.
QED
Second mean value theorem for definite integrals[edit]
There are various slightly different theorems called the second mean value theorem for definite integrals. A commonly found version is as follows:
- If G : [a, b] → R is a positive monotonically decreasing function and φ : [a, b] → R is an integrable function, then there exists a number x in (a, b] such that

Here  stands for
stands for  , the existence of which follows from the conditions. Note that it is essential that the interval (a, b] contains b. A variant not having this requirement is:[15]
, the existence of which follows from the conditions. Note that it is essential that the interval (a, b] contains b. A variant not having this requirement is:[15]
- If G : [a, b] → R is a monotonic (not necessarily decreasing and positive) function and φ : [a, b] → R is an integrable function, then there exists a number x in (a, b) such that

Mean value theorem for integration fails for vector-valued functions[edit]
If the function returns a multi-dimensional vector, then the MVT for integration is not true, even if the domain of is also multi-dimensional.
For example, consider the following 2-dimensional function defined on an  -dimensional cube:
-dimensional cube:
![{displaystyle {begin{cases}G:[0,2pi ]^{n}to mathbb {R} ^{2}\G(x_{1},dots ,x_{n})=left(sin(x_{1}+cdots +x_{n}),cos(x_{1}+cdots +x_{n})right)end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/313681274f21ab3d719858b7eee2f8fed7307df7)
Then, by symmetry it is easy to see that the mean value of over its domain is (0,0):
![{displaystyle int _{[0,2pi ]^{n}}G(x_{1},dots ,x_{n})dx_{1}cdots dx_{n}=(0,0)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/800b9da34869b8de54b9e67e50211354ff1230c9)
However, there is no point in which  , because
, because  everywhere.
everywhere.
A probabilistic analogue of the mean value theorem[edit]
Let X and Y be non-negative random variables such that E[X] < E[Y] < ∞ and  (i.e. X is smaller than Y in the usual stochastic order). Then there exists an absolutely continuous non-negative random variable Z having probability density function
(i.e. X is smaller than Y in the usual stochastic order). Then there exists an absolutely continuous non-negative random variable Z having probability density function
![{displaystyle f_{Z}(x)={Pr(Y>x)-Pr(X>x) over {rm {E}}[Y]-{rm {E}}[X]},,qquad xgeqslant 0.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/98380bb043d37ca11885348245ab1f1e05019170)
Let g be a measurable and differentiable function such that E[g(X)], E[g(Y)] < ∞, and let its derivative g′ be measurable and Riemann-integrable on the interval [x, y] for all y ≥ x ≥ 0. Then, E[g′(Z)] is finite and[16]
![{rm {E}}[g(Y)]-{rm {E}}[g(X)]={rm {E}}[g'(Z)],[{rm {E}}(Y)-{rm {E}}(X)].](https://wikimedia.org/api/rest_v1/media/math/render/svg/4d3a485925f91f6271a2201cc6cc46b4d5d381f6)
Mean value theorem in complex variables[edit]
As noted above, the theorem does not hold for differentiable complex-valued functions. Instead, a generalization of the theorem is stated such:[17]
Let f : Ω → C be a holomorphic function on the open convex set Ω, and let a and b be distinct points in Ω. Then there exist points u, v on the interior of the line segment from a to b such that


Where Re() is the real part and Im() is the imaginary part of a complex-valued function.
See also: Voorhoeve index.
See also[edit]
- Newmark-beta method
- Mean value theorem (divided differences)
- Racetrack principle
- Stolarsky mean
Notes[edit]
- ^ J. J. O’Connor and E. F. Robertson (2000). Paramesvara, MacTutor History of Mathematics archive.
- ^ Ádám Besenyei. “Historical development of the mean value theorem” (PDF).
- ^ Lozada-Cruz, German (2020-10-02). “Some variants of Cauchy’s mean value theorem”. International Journal of Mathematical Education in Science and Technology. 51 (7): 1155–1163. Bibcode:2020IJMES..51.1155L. doi:10.1080/0020739X.2019.1703150. ISSN 0020-739X. S2CID 213335491.
- ^ Sahoo, Prasanna. (1998). Mean value theorems and functional equations. Riedel, T. (Thomas), 1962-. Singapore: World Scientific. ISBN 981-02-3544-5. OCLC 40951137.
- ^ a b c Kirshna’s Real Analysis: (General). Krishna Prakashan Media.
- ^ “Mean Value Theorem”. keepnotes.com.
- ^ W., Weisstein, Eric. “Extended Mean-Value Theorem”. mathworld.wolfram.com. Retrieved 2018-10-08.
- ^ “Cauchy’s Mean Value Theorem”. Math24. Retrieved 2018-10-08.
- ^ Rudin, Walter (1976). Principles of Mathematical Analysis (3rd ed.). New York: McGraw-Hill. p. 113. ISBN 978-0-07-054235-8. Theorem 5.19.
- ^ Hörmander 2015, Theorem 1.1.1. and remark following it.
- ^
Lemma — Let v : [a, b] → Rm be a continuous function defined on the interval [a, b] ⊂ R. Then we have
Proof. Let u in Rm denote the value of the integral
Now we have (using the Cauchy–Schwarz inequality):
Now cancelling the norm of u from both ends gives us the desired inequality.
Mean Value Inequality — If the norm of Df(x + th) is bounded by some constant M for t in [0, 1], then
Proof.
- ^ “Mathwords: Mean Value Theorem for Integrals”. www.mathwords.com.
- ^ Michael Comenetz (2002). Calculus: The Elements. World Scientific. p. 159. ISBN 978-981-02-4904-5.
- ^ Editorial note: the proof needs to be modified to show there is a c in (a, b)
- ^ Hobson, E. W. (1909). “On the Second Mean-Value Theorem of the Integral Calculus”. Proc. London Math. Soc. S2–7 (1): 14–23. Bibcode:1909PLMS…27…14H. doi:10.1112/plms/s2-7.1.14. MR 1575669.
- ^ Di Crescenzo, A. (1999). “A Probabilistic Analogue of the Mean Value Theorem and Its Applications to Reliability Theory”. J. Appl. Probab. 36 (3): 706–719. doi:10.1239/jap/1032374628. JSTOR 3215435. S2CID 250351233.
- ^ 1 J.-Cl. Evard, F. Jafari, A Complex Rolle’s Theorem, American Mathematical Monthly, Vol. 99, Issue 9, (Nov. 1992), pp. 858-861.





References[edit]
- Hörmander, Lars (2015), The Analysis of Linear Partial Differential Operators I: Distribution Theory and Fourier Analysis, Classics in Mathematics (2nd ed.), Springer, ISBN 9783642614972
External links[edit]
- “Cauchy theorem”, Encyclopedia of Mathematics, EMS Press, 2001 [1994]
- PlanetMath: Mean-Value Theorem
- Weisstein, Eric W. “Mean value theorem”. MathWorld.
- Weisstein, Eric W. “Cauchy’s Mean-Value Theorem”. MathWorld.
- “Mean Value Theorem: Intuition behind the Mean Value Theorem” at the Khan Academy
