На этой странице я собрала теорию и практику, готовые задачи и подробные решения по предмету теория автоматического управления, чтобы вы смогли освежить знания.
Если что-то непонятно — вы всегда можете написать мне в WhatsApp и я вам помогу!

ТАУ
Теория автоматического управления (ТАУ) является одной из немногих общепрофессиональных технических дисциплин, входящих под тем или иным названием во все программы инженерного образования. Основой ТАУ являются различные по идеям и методам исследования разделы высшей математики и физики, такие как дифференциальное и интегральное исчисление, теория функций комплексного переменного, теория матриц, теория оптимальных процессов, математическая логика, теория вероятности и случайные процессы, механика, электричество и магнетизм и др.
Математическое описание систем управления. Уравнения и передаточные функции
Система или звено с одним выходом  и двумя входами
и двумя входами  и
и  в общем случае описывается уравнением
в общем случае описывается уравнением

или

где  обозначает оператор дифференцирования
обозначает оператор дифференцирования  ,
,
Дифференциальный оператор  при выходной переменной называется собственным оператором, а дифференциальные операторы
при выходной переменной называется собственным оператором, а дифференциальные операторы  и
и  при входных переменных и — операторами воздействия. Отношение оператора воздействия к собственному оператору называется передаточной функцией в операторной форме.
при входных переменных и — операторами воздействия. Отношение оператора воздействия к собственному оператору называется передаточной функцией в операторной форме.
Степень полинома знаменателя передаточной функции называют порядком, а разность между ее степенями знаменателя и числителя — относительным порядком или относительной степенью передаточной функции и соответствующей ей системы.
Нулями и полюсами передаточной функции

называют нули ее числителя и знаменателя соответственно, т. е. корни уравнений  и
и  , где рассматривается как переменная, а не как оператор.
, где рассматривается как переменная, а не как оператор.
Система (1.1) определяется двумя передаточными функциями: передаточной функцией

относительно входа и передаточной функцией

относительно входа . Порядок этих передаточных функций равен  , а относительный порядок —
, а относительный порядок —  для передаточной функции
для передаточной функции  и
и  для передаточной функции
для передаточной функции  .
.
С помощью передаточной функции уравнение рассматриваемой системы управления можно записать в виде

Имеющее наименьший порядок отношение изображений Лапласа выходной и входной переменных, вычисленных при нулевых начальных условиях, называется передаточной функцией в изображениях Лапласа. В соответствии с определением передаточная функция в изображениях Лапласа не может иметь равные между собой нули и полюса, так как в этом случае ее порядок может быть понижен путем сокращения числителя и знаменателя на общий множитель.
Передаточная функция системы управления в изображениях Лапласа  может быть определена по ее передаточной функции в операторной форме
может быть определена по ее передаточной функции в операторной форме  следующим образом:
следующим образом:

Если передаточная функция содержит одинаковые нули и полюса, то элементарные множители, соответствующие этим корням в числителе и знаменателе, после подстановки  должны быть сокращены.
должны быть сокращены.
Возможно эта страница вам будет полезна:
Задача №1.1.
Определить передаточные функции звеньев, описываемых уравнениями:
Решение:
В символической форме эти уравнения записываются в виде
а их передаточные функции в операторной форме соответственно равны

Передаточные функции в изображениях Лапласа имеют вид

Как видим, передаточные функции в изображениях Лапласа рассматриваемых звеньев совпадают, хотя они описываются разными дифференциальными уравнениями и общие решения однородных уравнений, описывающие свободные движения систем, отличаются между собой.
Временные функции
Переходной функцией системы (звена) называют функцию, описывающую реакцию системы на единичное ступенчатое воздействие при нулевых начальных условиях. Переходную функцию обозначают  . График переходной функции — кривую зависимости от времени
. График переходной функции — кривую зависимости от времени  — называют переходной или разгонной характеристикой.
— называют переходной или разгонной характеристикой.
Импульсной переходной или весовой функцией (функцией веса) называют функцию, описывающую реакцию системы (звена) на единичное импульсное воздействие при нулевых начальных условиях. Весовую функцию обозначают  . График импульсной переходной функции называют импульсной переходной характеристикой. Переходную и импульсную переходную функции называют временными функциями, а их графики — временными характеристиками.
. График импульсной переходной функции называют импульсной переходной характеристикой. Переходную и импульсную переходную функции называют временными функциями, а их графики — временными характеристиками.
Передаточная функция в изображениях Лапласа есть преобразование Лапласа от весовой функции:
Весовая функция равна производной от переходной функции:
Если изображение временной функции  имеет вид
имеет вид 
 , где
, где  и
и  — полиномы, и степень полинома больше степени m полинома , то
— полиномы, и степень полинома больше степени m полинома , то

если нули  полинома — простые. Если какой-либо полюс
полинома — простые. Если какой-либо полюс  имеет кратность
имеет кратность  , то ему соответствует слагаемое
, то ему соответствует слагаемое

Задача №1.2.
Определить переходную и весовую функции колебательного звена, т. е. звена с передаточной функцией

Решение:
Дифференциальное уравнение имеет вид

Для определения переходной функции нужно решить это уравнение при входном воздействии  и нулевых начальных условиях:
и нулевых начальных условиях:

Характеристическое уравнение имеет вид

и его корнями являются

или

Положив

общее решение однородного дифференциального уравнения можно записать в виде

Частное решение неоднородного уравнения  . Поэтому общее решение неоднородного уравнения
. Поэтому общее решение неоднородного уравнения

Производная от этого решения

Начальные условия принимают вид
Отсюда
Поэтому для переходной и весовой функций имеем

или, после элементарных преобразований
где

Задача №1.3.
Определить переходную и весовую функции звена с передаточной функцией
Решение:
Передаточная функция  является изображением Лапласа весовой функции
является изображением Лапласа весовой функции  . Полюса передаточной функции
. Полюса передаточной функции  являются простыми, и весовую функцию можно определить по формуле (1.2). В данном случае
являются простыми, и весовую функцию можно определить по формуле (1.2). В данном случае 
 и для весовой функции в соответствии с формулой (1.2) получаем
и для весовой функции в соответствии с формулой (1.2) получаем

Так как  то для изображения переходной функции имеем
то для изображения переходной функции имеем
В этом случае полюс  имеет кратность
имеет кратность  , а полюс
, а полюс  — простой. Поэтому слагаемое, соответствующее полюсу , найдем по формуле (1.3), а слагаемое, соответствующее полюсу , — по формуле (1.2). Согласно формуле (1.3) имеем
— простой. Поэтому слагаемое, соответствующее полюсу , найдем по формуле (1.3), а слагаемое, соответствующее полюсу , — по формуле (1.2). Согласно формуле (1.3) имеем

Так как

для слагаемого, соответствующего полюсу , имеем (см. (1.2))
Таким образом, переходная функция имеет вид

Частотные функции и характеристики
Функцию  , которая получается из передаточной функции в изображениях Лапласа
, которая получается из передаточной функции в изображениях Лапласа  при подстановке
при подстановке  , называют частотной передаточной функцией. Она является комплекснозначной функцией от действительной переменной
, называют частотной передаточной функцией. Она является комплекснозначной функцией от действительной переменной  называемой частотой. Частотную передаточную функцию можно представить в виде
называемой частотой. Частотную передаточную функцию можно представить в виде
Если

Ha комплексной плоскости частотная передаточная функция определяет вектор  (рис. 1.1), длина которого равна
(рис. 1.1), длина которого равна  , а аргумент — углу
, а аргумент — углу  , образованному этим вектором с положительной действительной полуосью. Кривую, описываемую концом вектора при изменении частоты от 0 до
, образованному этим вектором с положительной действительной полуосью. Кривую, описываемую концом вектора при изменении частоты от 0 до  или от — до , называют амплитудно-фазовой частотной характеристикой (АФЧХ).
или от — до , называют амплитудно-фазовой частотной характеристикой (АФЧХ).
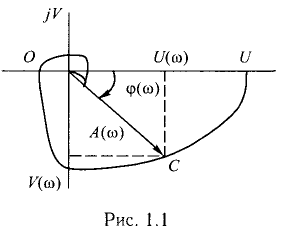
АФЧХ, получаемую при изменении частоты от — до , называют также диаграммой Найквиста. Модуль  называют амплитудной частотной функцией, ее график — амплитудной частотной характеристикой. Аргумент
называют амплитудной частотной функцией, ее график — амплитудной частотной характеристикой. Аргумент  называют фазовой частотной функцией, а его график (при изменении от 0 до ) — фазовой частотной характеристикой.
называют фазовой частотной функцией, а его график (при изменении от 0 до ) — фазовой частотной характеристикой.
Частотную передаточную функцию называют также амплитудно-фазовой частотной функцией. Ее действительную  и мнимую
и мнимую  части называют соответственно вещественной и мнимой частотной функцией, а их графики — кривые зависимостей
части называют соответственно вещественной и мнимой частотной функцией, а их графики — кривые зависимостей  — вещественной и мнимой частотной характеристикой соответственно.
— вещественной и мнимой частотной характеристикой соответственно.
Кроме перечисленных частотных характеристик имеются логарифмические частотные характеристики (ЛЧХ): логарифмические амплитудные частотные характеристики (ЛАЧX) и логарифмические фазовые частотные характеристики (ЛФЧХ).
Функцию

называют логарифмической амплитудной частотной функцией, а график зависимости функции  от логарифма частоты
от логарифма частоты  — логарифмической амплитудной частотной характеристикой (ЛАЧХ).
— логарифмической амплитудной частотной характеристикой (ЛАЧХ).
При построении ЛАЧХ по оси абсцисс откладывают значение частоты в логарифмическом масштабе и при этом на отметке, соответствующей значению , записывают значение ; по оси ординат откладывают и записывают значение  .
.
Логарифмической фазовой частотной характеристикой (ЛФЧХ) называют график зависимости функции от логарифма частоты . При ее построении по оси абсцисс, как и при построении ЛАЧХ, на отметке, соответствующей значению , записывают значение .
В ЛЧХ единицей функции является децибел, а единицей — декада. Декадой называют интервал, на котором частота изменяется в 10 раз. При изменении частоты в 10 раз говорят, что частота изменилась на одну декаду.
Определенные трудности представляет вычисление фазовой частотной функции. Если эта функция по модулю не превышает  , то она определяется по формуле
, то она определяется по формуле

В общем случае нужно разложить числитель и знаменатель передаточной функции на элементарные множители и определять фазовую частотную функцию по правилу вычисления аргумента произведения и частного комплексных чисел.
Правило вычисления модуля и аргумента. При вычислении амплитудной и фазовой частотной функций полезно следующее правило вычисления модуля и аргумента произведения и частного комплексных чисел (функций).
1) Модуль произведения  комплексных чисел равен произведению модулей сомножителей:
комплексных чисел равен произведению модулей сомножителей:

а аргумент — сумме аргументов сомножителей:

2) Модуль частного комплексных чисел (функций)  равен отношению модулей
равен отношению модулей
а аргумент — разности аргументов числителя и знаменателя:

Элементарные звенья и их характеристики. Так как произвольный полином можно разложить на простые множители, то передаточную функцию системы (звена)
всегда можно представить в виде произведения простых множителей и дробей вида

Здесь  называется передаточным коэффициентом,
называется передаточным коэффициентом,  — постоянной времени и
— постоянной времени и  — коэффициентом демпфирования.
— коэффициентом демпфирования.
Звенья, передаточные функции которых имеют вид простых множителей или дробей, называют элементарными звеньями. Их также называют типовыми.
Системы и звенья и их передаточные функции делятся на минимально-фазовые и неминимально-фазовые. Передаточная функция  называется минимально-фазовой, если все ее нули (корни уравнения
называется минимально-фазовой, если все ее нули (корни уравнения  ) и полюса (корни уравнения
) и полюса (корни уравнения  ) располагаются в левой полуплоскости, и неминимально-фазовой, если хотя бы один нуль или полюс располагается в правой полуплоскости.
) располагаются в левой полуплоскости, и неминимально-фазовой, если хотя бы один нуль или полюс располагается в правой полуплоскости.
Система и звено называются минимально-фазовыми, если их передаточные функции являются минимально-фазовыми, и неминимально-фазовыми, если их передаточные функции являются неминимально-фазовыми.
Передаточные функции системы, не являющиеся ни минимально-фазовыми и ни неминимально-фазовыми, иногда называют нейтральными или маргинальными. Иначе говоря, передаточная функция называется маргинальной, если она имеет нуль или полюс на мнимой оси, но не имеет их в правой полуплоскости.
Тип звена определяется видом его передаточной функции. При этом если передаточные функции звеньев отличаются только на постоянный множитель, то их относят к одному и тому же типу. Поэтому при определении типа элементарных звеньев будем исходить из передаточных функций, получаемых из (1.4) умножением на константу  (кроме первой).
(кроме первой).
Звено с передаточной функцией  называется пропорциональным звеном, звено с передаточной функцией
называется пропорциональным звеном, звено с передаточной функцией  — дифференцирующим звеном, звено с передаточной функцией
— дифференцирующим звеном, звено с передаточной функцией 
 — интегрирующим звеном, звено с передаточной функцией
— интегрирующим звеном, звено с передаточной функцией  — форсирующим звеном (первого порядка), звено с передаточной функцией
— форсирующим звеном (первого порядка), звено с передаточной функцией  — апериодическим звеном, звено с передаточной функцией —
— апериодическим звеном, звено с передаточной функцией — 
 — форсирующим звеном второго порядка, звено с передаточной функцией
— форсирующим звеном второго порядка, звено с передаточной функцией  — колебательным звеном.
— колебательным звеном.
Фазовые частотные функции минимально-фазовых и нейтральных звеньев с передаточными функциями, представляющими элементарный множитель первого порядка, по модулю не превышают  и определяются по формуле
и определяются по формуле  . В случае форсирующего звена второго порядка фазовая функция определяется по формуле
. В случае форсирующего звена второго порядка фазовая функция определяется по формуле  при частотах
при частотах  , а при
, а при  — по формуле
— по формуле

Физический смысл частотных характеристик. При гармоническом входном воздействии в устойчивых системах после окончания переходного процесса выходная переменная также изменяется по гармоническому закону с той же частотой, но с другими амплитудой и фазой; амплитуда равна амплитуде входного сигнала, умноженной на модуль частотной передаточной функции, а сдвиг фазы — ее аргументу. Поэтому если система с передаточной функцией  устойчива, то при входном воздействии
устойчива, то при входном воздействии

после окончания переходного процесса выходной сигнал

Здесь  — постоянная амплитуда входного сигнала,
— постоянная амплитуда входного сигнала,  — начальный сдвиг фазы,
— начальный сдвиг фазы,  — частотная передаточная функция рассматриваемой системы,
— частотная передаточная функция рассматриваемой системы,

Задача №1.4.
На вход системы подается сигнал  Определить в установившемся режиме реакцию системы с передаточной функцией
Определить в установившемся режиме реакцию системы с передаточной функцией
Решение:
В данном случае частотная передаточная функция имеет вид

и

Поэтому

и соответственно

Задача №1.15.
На вход системы подается сигнал  . Определить в установившемся режиме реакцию систем при передаточных функциях, приведенных в задании 1.14.
. Определить в установившемся режиме реакцию систем при передаточных функциях, приведенных в задании 1.14.
Асимптотические логарифмические амплитудные частотные характеристики. Логарифмические амплитудные частотные характеристики (ЛАЧХ) пропорционального, дифференцирующего и интегрирующего звеньев являются прямыми и их легко построить. Построение ЛАЧХ других элементарных звеньев требует трудоемких вычислений. Поэтому на практике часто ограничиваются построением приближенных асимптотических ЛАЧХ.
При построении асимптотической ЛАЧХ апериодического звена в выражении

при под корнем пренебрегают слагаемым  , меньшим единицы, а при — единицей. Поэтому уравнение асимптотической ЛАЧХ имеет вид
, меньшим единицы, а при — единицей. Поэтому уравнение асимптотической ЛАЧХ имеет вид

При построении асимптотической ЛАЧХ колебательного звена в выражении

при  под корнем оставляют только единицу, а при
под корнем оставляют только единицу, а при  — только наибольшее слагаемое
— только наибольшее слагаемое  . Поэтому уравнение асимптотической ЛАЧХ имеет вид
. Поэтому уравнение асимптотической ЛАЧХ имеет вид

Аналогично поступают при построении асимптотических ЛАЧХ форсирующих звеньев. Частоты, на которых асимптотические ЛАЧХ претерпевают излом, называются сопрягающими частотами.
Для построения ЛАЧХ и ЛФЧХ звена с произвольной дробно-рациональной передаточной функцией  нужно ее числитель и знаменатель разложить на элементарные множители и представить в виде произведения передаточных функций элементарных звеньев
нужно ее числитель и знаменатель разложить на элементарные множители и представить в виде произведения передаточных функций элементарных звеньев
или в виде
где  представляет собой отношение произведений элементарных множителей 1-го и 2-го порядка с единичным передаточным коэффициентом, т. е. множителей вида
представляет собой отношение произведений элементарных множителей 1-го и 2-го порядка с единичным передаточным коэффициентом, т. е. множителей вида

Из (1.5) имеем:
Из (1.7) следует, что для построения ЛАЧХ произвольного звена достаточно построить ЛАЧХ элементарных звеньев, на которые оно разлагается, а затем их геометрически сложить. Однако для построения асимптотических ЛАЧХ можно использовать несколько иное, более простое правило. Проиллюстрируем это сначала на частном примере.
Возможно эта страница вам будет полезна:
Задача №1.5.
Построить асимптотическую ЛАЧХ для звена с передаточной функцией

Решение:
Преобразуем передаточную функцию к виду

Логарифмическая амплитудная частотная функция

Вычислим сопрягающие частоты и пронумеруем их в порядке возрастания:

Здесь  и
и  — сопрягающие частоты апериодического, форсирующего и колебательного звеньев соответственно.
— сопрягающие частоты апериодического, форсирующего и колебательного звеньев соответственно.
Напомним, что при построении асимптотических ЛАЧХ при частотах, меньших сопрягающей частоты, под корнем оставляют только единицу (остальными членами пренебрегают), при частотах, больших сопрягающей частоты, — член с наивысшей степенью  . Поэтому в рассматриваемом примере при
. Поэтому в рассматриваемом примере при  имеем
имеем

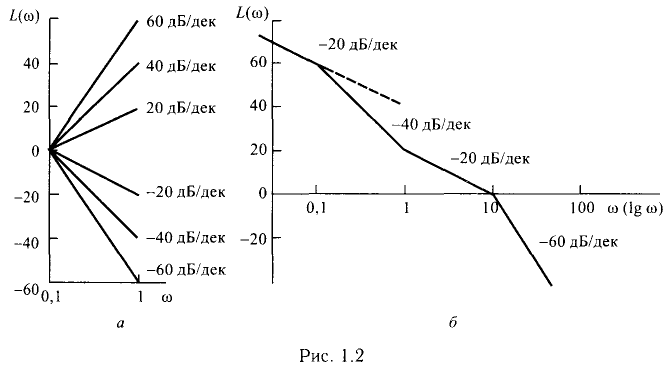
Это уравнение прямой, которая проходит через точку с координатами  и
и  с наклоном —20 дб/дек. Прямая имеет наклон -20 дб/дек (20 дб/дек) — это означает, что при увеличении частоты на декаду (т. е. в 10 раз)
с наклоном —20 дб/дек. Прямая имеет наклон -20 дб/дек (20 дб/дек) — это означает, что при увеличении частоты на декаду (т. е. в 10 раз)  уменьшается (увеличивается) на 20 дБ (рис. 1.2, а). Первая асимптота заканчивается на первой сопрягающей частоте (рис. 1.2, б).
уменьшается (увеличивается) на 20 дБ (рис. 1.2, а). Первая асимптота заканчивается на первой сопрягающей частоте (рис. 1.2, б).
При  аналогично имеем
аналогично имеем

Это уравнение второй асимптоты. Ее наклон по отношению к первой асимптоте изменяется на —20 дб/дек и обусловливается апериодическим звеном, т. е. множителем первого порядка в знаменателе рассматриваемой передаточной функции. Вторую асимптоту проводят от конца первой асимптоты до второй сопрягающей частоты под наклоном -40 дб/дек.
При


Это уравнение третьей асимптоты. Ее наклон по отношению ко второй асимптоте изменяется на 20 дб/дек и обусловливается форсирующим звеном, т. е. множителем первого порядка в числителе. Третью асимп-
тоту проводят от конца второй асимптоты до третьей сопрягающей частоты под наклоном —20 дб/дек. При


Это уравнение последней, четвертой, асимптоты. Ее наклон изменяется по отношению к третьей асимптоте на -40 дб/дек и обусловливается множителем второго порядка в знаменателе.
Правило построения асимптотических ЛАЧХ
1) Пользуясь представлением (1.6), вычислить 20  : и сопрягающие частоты
: и сопрягающие частоты  , которые следует пронумеровать в порядке возрастания:
, которые следует пронумеровать в порядке возрастания: 
2) На оси абсцисс отметить сопрягающие частоты, а на координатной плоскости — точку (1,20). Построить первую асимптоту — прямую под наклоном —  20 дБ/дек, проходящую через отмеченную точку на координатной плоскости. Первая асимптота заканчивается на первой сопрягающей частоте
20 дБ/дек, проходящую через отмеченную точку на координатной плоскости. Первая асимптота заканчивается на первой сопрягающей частоте  .
.
3) Построить вторую асимптоту, которая начинается с конца первой асимптоты и проводится до второй сопрягающей частоты Его наклон изменяется на ±20 дБ/дек или ±40 дБ/дек в зависимости от того, обусловливается ли элементарным множителем первого или второго прядка соответственно. Принимается положительный знак, если указанный множитель находится в числителе, и отрицательный знак, если этот множитель находится в знаменателе.
4) Построить остальные асимптоты, которые строятся аналогично второй асимптоте:  -я асимптота начинается с конца предыдущей ( — 1)-й асимптоты и проводится до сопрягающей частоты
-я асимптота начинается с конца предыдущей ( — 1)-й асимптоты и проводится до сопрягающей частоты  . Ее наклон определяется сопрягающей частотой
. Ее наклон определяется сопрягающей частотой  .
.
Последняя асимптота представляет собой прямую, которая начинается в конце асимптоты, соответствующей последней сопрягающей частоте, и уходит в бесконечность.
Возможно эта страница вам будет полезна:
Задача №1.6.
Построить асимптотическую ЛАЧХ звена с передаточной функцией

Решение:
Преобразуем передаточную функцию к виду

1) = 0. Вычислим 20 и сопрягающие частоты:

Проводим через точку с координатами (1, 20) первую асимптоту под наклоном 0 дБ/дек (т. е. параллельно оси абсцисс) до первой сопрягающей частоты = 0,1 (рис. 1.3, а).
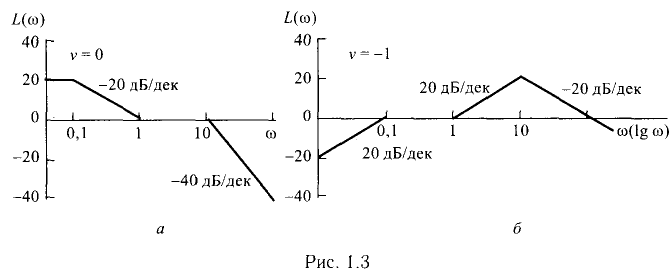
Так как первая сопрягающая частота обусловлена множителем первого порядка  , расположенным в знаменателе, наклон второй асимптоты изменяется на -20 дБ/дек. Поэтому вторую асимптоту проводим от конца первой асимптоты до сопрягающей частоты
, расположенным в знаменателе, наклон второй асимптоты изменяется на -20 дБ/дек. Поэтому вторую асимптоту проводим от конца первой асимптоты до сопрягающей частоты  = 1 под наклоном -20 дБ/дек.
= 1 под наклоном -20 дБ/дек.
Сопрягающая частота обусловлена элементарным множителем  , расположенным в числителе. Поэтому наклон третьей асимптоты отличается от наклона второй на 20 дБ/дек и составляет 0 дБ/дек. Третью асимптоту проводим от конца второй асимптоты до сопрягающей частоты
, расположенным в числителе. Поэтому наклон третьей асимптоты отличается от наклона второй на 20 дБ/дек и составляет 0 дБ/дек. Третью асимптоту проводим от конца второй асимптоты до сопрягающей частоты  = 10.
= 10.
Сопрягающая частота обусловлена элементарным множителем  . расположенным в знаменателе. Поэтому наклон четвертой асимптоты отличается от наклона третьей асимптоты на -40 дБ/дек. Последнюю асимптоту проводим от конца третьей асимптоты до бесконечности.
. расположенным в знаменателе. Поэтому наклон четвертой асимптоты отличается от наклона третьей асимптоты на -40 дБ/дек. Последнюю асимптоту проводим от конца третьей асимптоты до бесконечности.
2) = — 1. Значения 20 и сопрягающих частот те же, что и в предыдущем случае. Первую асимптоту проводим через точку с координатами (1, 20) с наклоном —20 дБ/дек = 20 дБ/дек до первой сопрягающей частоты (рис. 1.3, б). Все последующие асимптоты строятся так же, как и в предыдущем случае.
Структурные схемы
Структурной схемой системы управления называют графическое представление ее математической модели в виде соединений звеньев, изображаемых в виде прямоугольников или круга (для сумматора), с указанием входных и выходных переменных.
Обычно внутри прямоугольника указывается условное обозначение оператора изображаемого им звена, а сам оператор в виде передаточной функции или дифференциального уравнения задается вне структурной схемы.
Преобразование структурных схем.
Последовательное соединение. Так называется соединение, при котором выход предыдущего звена является входом последующего (рис. 1.4, а). При последовательном соединении передаточные функции отдельных звеньев перемножаются и при преобразовании структурных схем цепочку из последовательно соединенных звеньев можно заме-
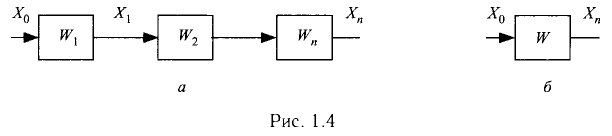
нить одним звеном с передаточной функцией 
 (рис. 1.4, б).
(рис. 1.4, б).
Параллельное соединение. Так называется соединение, при котором на вход всех звеньев подается одно и то.же воздействие, а их выходные переменные складываются (рис. 1.5, а). При параллельном
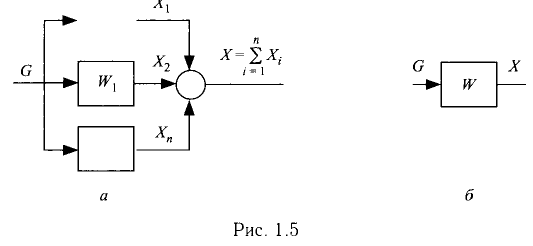
соединении звеньев передаточные функции складываются и при преобразовании их можно заменить одним звеном с передаточной функцией
Если выход какого-либо звена поступает на сумматор с отрицательным знаком, то передаточная функция этого звена складывается с отрицательным знаком, т. е. вычитается.
Обратное соединение или звено, охваченное обратной связью. Так называется соединение двух звеньев, при котором выход звена прямой цепи подается на вход звена обратной связи, выход которого складывается с входом первого звена (рис. 1.6, а). Если сигнал обратной
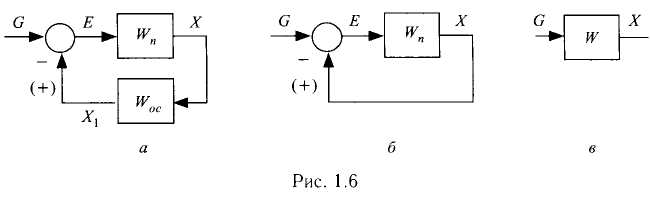
связи (выход звена обратной связи) вычитается (т. е. складывается с отрицательным знаком), то обратная связь называется отрицательной; в противном случае — положительной. Когда передаточная функция звена обратной связи равна единице 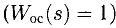 обратное соединение изображается так, как показано на рис. 1.6, б.
обратное соединение изображается так, как показано на рис. 1.6, б.
При размыкании обратной связи перед сумматором получаем последовательное соединение, передаточная функция которого равна

Эта передаточная функция называется передаточной функцией разомкнутой цепи.
Передаточную функцию

в которой учитывается передаточная функция сумматора по входу обратной связи, будем называть передаточной функцией контура. Здесь  — передаточная функция сумматора по входу обратной связи, она равна -1 (минус единице) при отрицательной обратной связи (перед соответствующим входом стоит знак минус) и 1 (плюс единице) при положительной обратной связи.
— передаточная функция сумматора по входу обратной связи, она равна -1 (минус единице) при отрицательной обратной связи (перед соответствующим входом стоит знак минус) и 1 (плюс единице) при положительной обратной связи.
Передаточная функция при обратном соединении равна 

 и при преобразовании обратное соединение заменяется одним звеном с указанной передаточной функцией (рис. 1.6, в).
и при преобразовании обратное соединение заменяется одним звеном с указанной передаточной функцией (рис. 1.6, в).
Перенос сумматора. При переносе сумматора по ходу сигнала добавляется звено с передаточной функцией, равной передаточной функции звена, через которое переносится сумматор (рис. 1.7, а).
При переносе сумматора против хода сигнала добавляется звено с передаточной функцией, равной обратной передаточной функции звена, через которое переносится сумматор (рис. 1.7, б).
При переносе сумматора участок цепи, через который он переносится, становится неэквивалентным. Поэтому при преобразовании структурных схем нельзя переносить сумматор через точку съема сигнала.
Перенос узла. При переносе узла по ходу сигнала добавляется звено с передаточной функцией, равной обратной передаточной функции звена, через которое переносится узел (рис. 1.8, а).
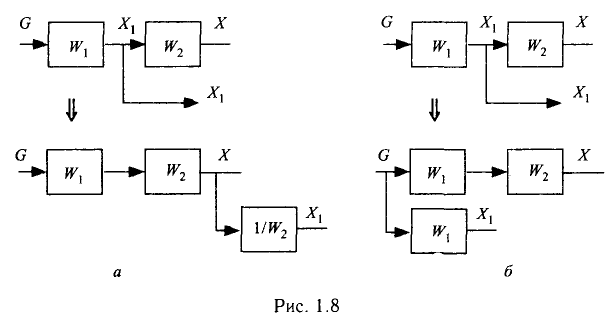
При переносе узла против хода сигнала добавляется звено с передаточной функцией, равной передаточной функции звена, через которое переносится узел (рис. 1.8, б).
Перестановка сумматоров. Сумматоры можно переставлять местами и объединять. Перестановка двух сумматоров соответствует переносу одного сумматора через другой и подчиняется правилу переноса сумматора через звено.
Сумматор 1 (рис. 1.9) переносится через сумматор 2 по направлению распространения сигнала, а сумматор 2 через сумматор 1 против направления распространения сигнала.
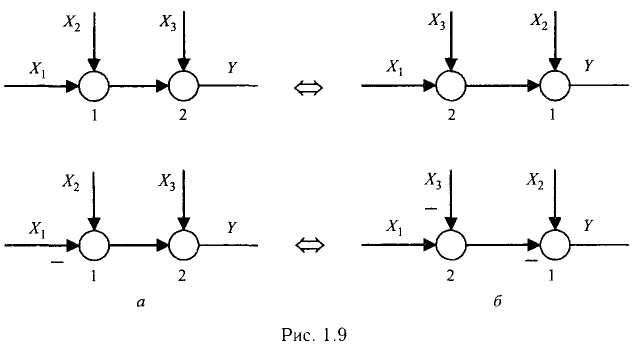
Но так как передаточная функция сумматора по каждому входу равна 1 или -1, то и передаточная функция звена, которое добавляется при переносе сумматора, независимо от направления переноса равна 1 или -1. Поэтому если сумматор переносится через другой сумматор вдоль входа со знаком плюс, добавляется звено с передаточной функцией 1, т. е. в действительности ничего не добавляется (рис. 1.9, а); если сумматор переносится вдоль входа со знаком минус, то добавляется звено с передаточной функцией -1, т.е. знак по входу, куда должно быть добавлено звено, меняется на обратный (рис. 1.9, б).
Перестановка узлов. Узлы можно переставлять местами и объединять.
Вычисление передаточной функции одноконтурной системы.
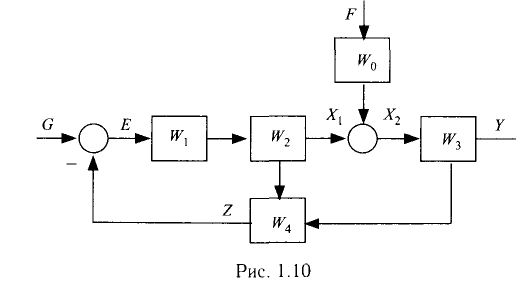
Замкнутая система называется одноконтурной, если при ее размыкании в какой-либо точке замкнутого контура получается система без параллельных и обратных соединений (рис. 1.10).
Цепь по ходу сигнала от точки приложения входной переменной до точки съема выходной переменной называется прямой цепью. Передаточная функция прямой цепи  равна произведению передаточных функций звеньев, входящих в эту цепь, включая и сумматоры. Передаточная функция контура
равна произведению передаточных функций звеньев, входящих в эту цепь, включая и сумматоры. Передаточная функция контура  равна произведению передаточных функций всех звеньев, входящих в замкнутый контур, включая сумматоры. Передаточная функция сумматора по входу со знаком плюс равна плюс единице, а по входу со знаком минус — минус единице.
равна произведению передаточных функций всех звеньев, входящих в замкнутый контур, включая сумматоры. Передаточная функция сумматора по входу со знаком плюс равна плюс единице, а по входу со знаком минус — минус единице.
Правило вычисления передаточной функции замкнутой одноконтурной системы: передаточная функция одноконтурной системы относительно внешнего воздействия (входа)  и выхода
и выхода  равна передаточной функции прямой цепи, деленной на единицу минус передаточная функция контура:
равна передаточной функции прямой цепи, деленной на единицу минус передаточная функция контура:

Возможно эта страница вам будет полезна:
Задача №1.7.
Определить передаточные функции системы (рис. 1.10)  относительно входа
относительно входа  и выхода
и выхода  и
и  относительно входа
относительно входа  и выхода
и выхода  .
.
Решение:
Прямая цепь системы (см. рис. 1.10) относительно входа и выхода представляет последовательное соединение двух сумматоров и звеньев с передаточными функциями  и
и  . Входы сумматоров в этой цепи имеют знак плюс и их передаточные функции равны единице. Поэтому передаточная функция прямой цепи
. Входы сумматоров в этой цепи имеют знак плюс и их передаточные функции равны единице. Поэтому передаточная функция прямой цепи

Прямая цепь относительно входа и выхода представляет последовательное соединение двух сумматоров и звеньев с передаточными функциями  и
и  . Вход первого сумматора имеет знак плюс, вход второго сумматора — знак минус и их передаточные функции равны 1 и —1 соответственно. Поэтому в этом случае передаточная функция прямой цепи
. Вход первого сумматора имеет знак плюс, вход второго сумматора — знак минус и их передаточные функции равны 1 и —1 соответственно. Поэтому в этом случае передаточная функция прямой цепи

Искомые передаточные функции имеют вид

Вычисление передаточной функции многоконтурной системы.
Замкнутая система называется многоконтурной, если при ее размыкании в какой-либо точке замкнутого контура получается система, содержащая параллельное и/или обратное соединение.
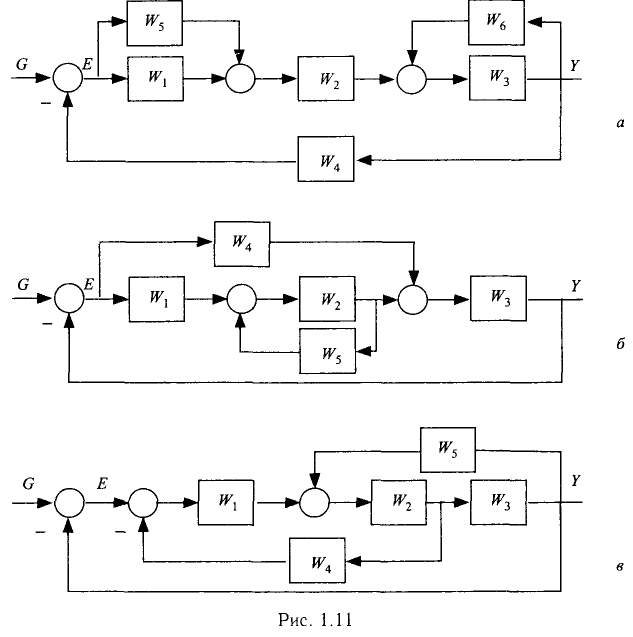
Многоконтурная система не имеет перекрестных связей, если любые два контура, образованные параллельными или обратными соединениями, не имеют общих участков (рис. 1.11, а) или, если какие-либо два контура имеют общий участок, то один из них вложен внутрь другого (рис. 1.11, б).
Многоконтурная система имеет перекрестные связи, если она содержит два контура, которые имеют общий участок, и при этом ни один из них не вложен внутрь другого (рис. 1.11, в).
Порядок вычисления передаточной функции многоконтурной системы следующий:
1) путем переноса узлов и сумматоров нужно освободиться от перекрестных связей;
2) используя правила преобразования параллельных и обратных соединений, нужно преобразовать многоконтурную систему в одноконтурную;
3) по правилу вычисления передаточной функции одноконтурной системы определить искомую передаточную функцию.
При преобразовании структурной схемы нужно позаботится о том, чтобы не исчезли точки съема переменных, относительно которых ищутся передаточные функции, или чтобы эти точки не оказались на неэквивалентном участке (т. е. не следует переносить сумматор через эти точки).
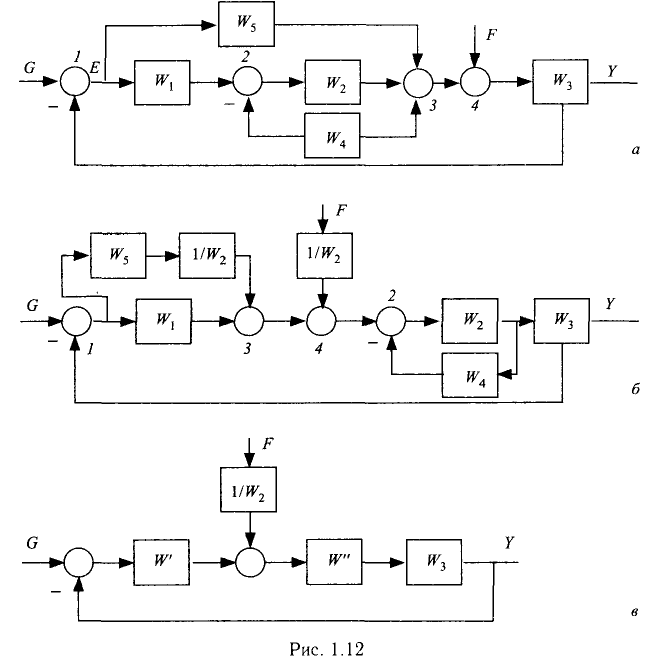
Задача №1.8.
Определить передаточные функции  и
и  системы управления, представленной на рис 1.12, а.
системы управления, представленной на рис 1.12, а.
Решение:
Сначала освободимся от перекрестных связей. Для этого перенесем сумматор 3 против хода сигнала через звено  и сум-
и сум-
матор 2. То же самое проделаем с сумматором 4 (рис. 1.12, б). Далее, заменив параллельное соединение звеном с передаточной функцией

и обратное соединение звеном с передаточной функцией
получим одноконтурную систему (рис. 1.12, в). Из последней схемы по правилу вычисления передаточной функции одноконтурной системы находим

При вычислении передаточных функций многоконтурных систем с перекрестными связями во многих случаях целесообразно, а иногда
и необходимо сначала предварительно упростить схему, используя правила преобразования параллельных и обратных соединений, затем освободиться от перекрестных связей.
Граф системы управления
Граф системы управления состоит из дуг и вершин. Дуга соответствует звену и на схеме изображается отрезком линии со стрелкой, указывающей направление распространения сигнала. Дуга начинается и кончается в вершине.
Вершина на схеме изображается кружком и определяет переменную. Если к вершине подходит одна дуга, то она определяет выходную величину дуги (рис. 1.17, а), если же в вершину входят несколько дуг, то она соответствует сумме выходных переменных этих дуг (рис. 1.17, б).
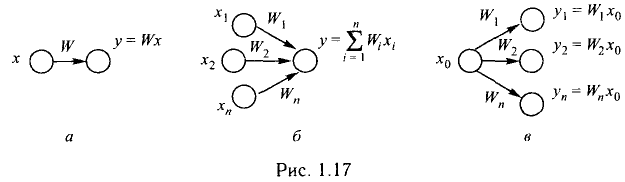
Начальная вершина дуги определяет ее входную переменную (рис. 1.17, в). Вершина графа, имеющая только выходящие из нее дуги, определяет внешнее воздействие и называется входной вершиной графа.
Последовательность дуг  (не обязательно разных), для которых конечная вершина
(не обязательно разных), для которых конечная вершина  дуги
дуги  является начальной вершиной дуги
является начальной вершиной дуги  называется ориентированным маршрутом или ормаршрутом. Ормаршрут называется замкнутым, если конечная вершина дуги
называется ориентированным маршрутом или ормаршрутом. Ормаршрут называется замкнутым, если конечная вершина дуги  совпадает с начальной вершиной дуги , и незамкнутым в противном случае.
совпадает с начальной вершиной дуги , и незамкнутым в противном случае.
Ормаршрут, в котором все дуги разные, называется путем от начальной вершины  к конечной вершине
к конечной вершине  , если он не замкнут, и контуром, если он замкнут ( и совпадают). Путь и контур называют простыми, если все вершины
, если он не замкнут, и контуром, если он замкнут ( и совпадают). Путь и контур называют простыми, если все вершины  различны. Простой путь также называют прямым путем.
различны. Простой путь также называют прямым путем.
Два контура называются несоприкасающимися, если они не имеют общих вершин. Три, четыре и т.д. контура называются несоприкасающимися, если любая пара из этих контуров является несоприкасающейся.
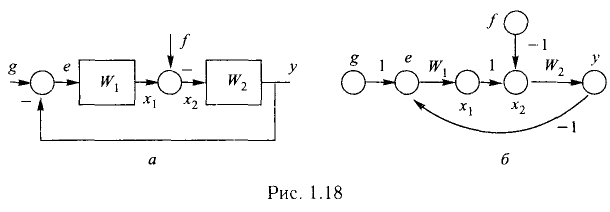
Граф системы управления можно построить по структурной схеме. Для этого нужно произвести следующее (рис. 1.18):
1) сумматор с выходной переменной  заменить вершиной ;
заменить вершиной ;
2) звено с передаточной функцией  заменить дугой если выходная переменная подается на сумматор по отрицательному входу, то указанное звено заменить дугой — ;
заменить дугой если выходная переменная подается на сумматор по отрицательному входу, то указанное звено заменить дугой — ;
3) каждой переменной, в том числе переменной, соответствующей внешнему воздействию, сопоставить свою вершину.
Формула Мейсона. Определителем графа (подграфа) называется передаточная функция  , равная
, равная

Здесь в первой сумме  — передаточная функция
— передаточная функция  -го простого контура, равная произведению передаточных функций дуг, входящих в этот контур, и суммирование производится по всем простым контурам; во второй сумме
-го простого контура, равная произведению передаточных функций дуг, входящих в этот контур, и суммирование производится по всем простым контурам; во второй сумме  — произведение передаточных функций -го и
— произведение передаточных функций -го и  -го простых контуров и суммирование производится по всем несоприкасающимся парам контуров; в третьей сумме
-го простых контуров и суммирование производится по всем несоприкасающимся парам контуров; в третьей сумме  — произведение передаточных функций -го, -го и
— произведение передаточных функций -го, -го и  -го простых контуров и суммирование производится по всем несоприкасающимся тройкам контуров и т. д.
-го простых контуров и суммирование производится по всем несоприкасающимся тройкам контуров и т. д.
Подграфом  -го прямого пути называется подграф, который получается из исходного графа отбрасыванием всех дуг и вершин -го пути, а также всех дуг, начинающихся или кончающихся на вершинах этого пути.
-го прямого пути называется подграф, который получается из исходного графа отбрасыванием всех дуг и вершин -го пути, а также всех дуг, начинающихся или кончающихся на вершинах этого пути.
Передаточная функция системы управления относительно входа и выхода  определяется следующим образом:
определяется следующим образом:
где — определитель графа системы управления;
 — передаточная функция -го прямого пути от начальной вершины к конечной вершине ;
— передаточная функция -го прямого пути от начальной вершины к конечной вершине ;
 — общее число таких прямых путей;
— общее число таких прямых путей;
 — определитель подграфа -го прямого пути.
— определитель подграфа -го прямого пути.
Задача №1.9.
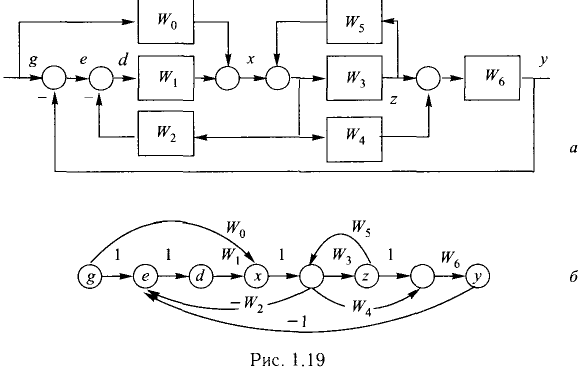
Построить граф и по теореме Мейсона определить передаточную функцию  системы (рис. 1.19, а).
системы (рис. 1.19, а).
Решение:
Граф системы управления представлен на рис. 1.19, б. От вершины  до вершины
до вершины  имеются четыре прямых пути. Передаточные функции этих путей равны
имеются четыре прямых пути. Передаточные функции этих путей равны
Подграф 1-го пути состоит из вершин  и
и  , 2-го пути — из вершин
, 2-го пути — из вершин  и ; подграф 3-го пути есть пустой граф, подграф 4-го пути состоит из вершины . И так как все они не имеют контуров, их определители равны единице:
и ; подграф 3-го пути есть пустой граф, подграф 4-го пути состоит из вершины . И так как все они не имеют контуров, их определители равны единице:

Граф системы управления имеет четыре простых контура. Их передаточные функции имеют вид

Несоприкасающихся пар контуров нет. Поэтому определитель графа имеет вид

Для искомой передаточной функции получаем

Математическое описание некоторых технических устройств
В общем случае функциональная схема системы автоматического управления имеет вид, представленный на рис. 2.1, где приняты следующие обозначения: УУ — управляющее устройство, включающее
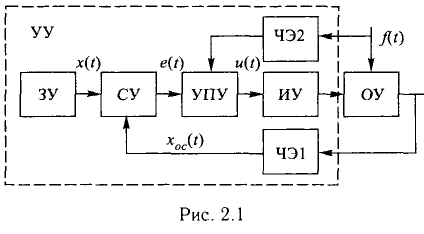
в себя ЗУ — задающее устройство, вырабатывающее задающий сигнал  ; СУ — сравнивающее устройство, вырабатывающее сигнал ошибки
; СУ — сравнивающее устройство, вырабатывающее сигнал ошибки

УПУ — усилительно-преобразовательное устройство, включающее в себя помимо усилителя и преобразователь или корректирующее устройство, которое на основе сигнала ошибки  и измеренного возмущения
и измеренного возмущения  вырабатывает управляющее воздействие
вырабатывает управляющее воздействие  ; ИУ — исполнительное устройство, непосредственно воздействующее на объект управления ОУ; ЧЭ1 и ЧЭ2 — чувствительные элементы (датчики), измеряющие управляемую переменную
; ИУ — исполнительное устройство, непосредственно воздействующее на объект управления ОУ; ЧЭ1 и ЧЭ2 — чувствительные элементы (датчики), измеряющие управляемую переменную  и возмущение и при необходимости преобразующие их в иную физическую переменную (например, механическую или тепловую в электрическую); ОУ — объект управления.
и возмущение и при необходимости преобразующие их в иную физическую переменную (например, механическую или тепловую в электрическую); ОУ — объект управления.
В данной главе рассматриваются задачи, связанные с математическим описанием (дифференциальными уравнениями и передаточными функциями) некоторых технических устройств, используемых в системах автоматического управления (САУ) в качестве упомянутых выше элементов.
Чувствительные элементы — датчики
Датчики линейных и угловых перемещений. В САУ для измерения линейных и угловых перемещений используются линейные и вращающиеся потенциометрические датчики (ПД). Для измерения угловых перемещений используются вращающиеся трансформаторы (ВТ) и сельсины (С). На этих элементах выполняют также и сравнивающие устройства (СУ). Принцип действия этих устройств, их схемы и основные характеристики рассматриваются в довольно обширной литературе [1, 2, 5-8, 10]. Упомянутые выше потенциометрические датчики, вращающиеся трансформаторы и сельсины при исследовании динамики считаются безынерционными звеньями с передаточной функцией
где  — передаточный коэффициент датчика.
— передаточный коэффициент датчика.
Для потенциометрических датчиков и вращающихся трансформаторов коэффициент определяется крутизной статической характеристики, но следует иметь в виду, что для вращающихся трансформаторов это верно при малых углах, иначе необходимо учитывать нелинейность характеристики. Передаточный коэффициент сельсина, работающего в трансформаторном режиме, также рассчитывается по крутизне характеристики, определяемой по следующей формуле:
Так, например, передаточная функция ПД типа ПП

передаточная функция ВТ типа ВТ-5

передаточная функция сельсина типа СГСМ-1

Для измерения угловой скорости используют тахогенераторы (ТГ) постоянного и переменного тока. Строго говоря, по динамическим свойствам их можно отнести к апериодическому звену второго порядка с передаточной функцией

где  — напряжение на выходе ТГ,
— напряжение на выходе ТГ,  — электрическая постоянная времени,
— электрическая постоянная времени,  — индуктивность обмотки якоря,
— индуктивность обмотки якоря,  — активное сопротивление обмотки якоря,
— активное сопротивление обмотки якоря,  — электромеханическая постоянная времени. Но поскольку якорь ТГ соединен с валом двигателя, скорость которого он измеряет, его момент инерции учитывается при расчете электромеханической постоянной времени двигателя в суммарном моменте инерции. Учитывая, что
— электромеханическая постоянная времени. Но поскольку якорь ТГ соединен с валом двигателя, скорость которого он измеряет, его момент инерции учитывается при расчете электромеханической постоянной времени двигателя в суммарном моменте инерции. Учитывая, что  , ТГ можно считать безынерционным звеном с передаточной функцией
, ТГ можно считать безынерционным звеном с передаточной функцией  . где
. где  — передаточный коэффициент ТГ, определяемый крутизной статической характеристики
— передаточный коэффициент ТГ, определяемый крутизной статической характеристики  .
.
Например, передаточная функция ТГ типа ТП-75

а для ТГ типа ДГ-3ТА

Основные характеристики некоторых типов ТГ приведены в [2, 10].
Датчики температуры. Для измерения температуры в системах автоматического управления используются электротепловые датчики: термопары (ТП) и термосопротивления (ТС) [5, 6, 8, 10]. Датчики этого типа с точки зрения динамики являются апериодическим (инерционным) звеном первого порядка с передаточной функцией
где  — постоянная времени термодатчика, которая колеблется для некоторых типов датчиков от долей секунды до нескольких минут,
— постоянная времени термодатчика, которая колеблется для некоторых типов датчиков от долей секунды до нескольких минут,  — передаточный коэффициент термодатчика, который определяется крутизной статической характеристики.
— передаточный коэффициент термодатчика, который определяется крутизной статической характеристики.
Усилители
В САУ используются все известные типы усилителей: электрические, гидравлические и пневматические. В качестве электрических используются электронные (ЭУ) (полупроводниковые, тиристорные), магнитные (МУ) и электромашинные (ЭМУ).
Электронные усилители. Электронные усилители можно считать безынерционным звеном с передаточной функцией
так как их постоянная времени мала по сравнению с постоянными времени электромеханических элементов системы. Коэффициент усиления по напряжению  рассчитывается как отношение выходного напряжения усилителя
рассчитывается как отношение выходного напряжения усилителя  ко входному напряжению
ко входному напряжению  .
.
Магнитные усилители. Наибольшее распространение в САУ получила схема двухтактного реверсивного МУ [5, 8-10]. По динамическим свойствам МУ этого типа эквивалентен апериодическому звену с передаточной функцией
Для увеличения коэффициента усиления используют внутреннюю обратную связь. Постоянная времени Тму для МУ с положительной обратной связью рассчитывается по следующей формуле:
где  — частота напряжения питания в Гц,
— частота напряжения питания в Гц,  — активное сопротивление нагрузки,
— активное сопротивление нагрузки,  — общее активное сопротивление цепи управления усилителя с учетом сопротивления источника управляющего сигнала в Ом,
— общее активное сопротивление цепи управления усилителя с учетом сопротивления источника управляющего сигнала в Ом,  и
и  — число витков рабочей обмотки и обмотки управления соответственно,
— число витков рабочей обмотки и обмотки управления соответственно,  — коэффициент положительной обратной связи. Коэффициент усиления по напряжению
— коэффициент положительной обратной связи. Коэффициент усиления по напряжению  вычисляется по формуле
вычисляется по формуле
где  — ток в нагрузке,
— ток в нагрузке,  — ток в обмотке управления.
— ток в обмотке управления.
Магнитные усилители рассчитываются для каждого отдельного случая, серийно промышленностью не выпускаются.
Электромашинные усилители. ЭМУ используются в САУ в случае наличия источника механической энергии (например, дизель и т.п.). Их применяют для управления двигателем постоянного тока, когда требуется высокий коэффициент усиления по мощности. Известны различные конструкции ЭМУ [3, 5, 6, 8, 10]. ЭМУ с поперечным полем описывается передаточной функцией апериодического звена второго порядка

где  — коэффициент усиления ЭМУ, равный
— коэффициент усиления ЭМУ, равный

 и
и  — активные сопротивления обмотки управления и поперечной короткозамкнутой обмотки соответственно,
— активные сопротивления обмотки управления и поперечной короткозамкнутой обмотки соответственно,  — коэффициент пропорциональности между ЭДС в поперечной обмотке и током управления,
— коэффициент пропорциональности между ЭДС в поперечной обмотке и током управления,  —коэффициент пропорциональности между выходной ЭДС и током в поперечной обмотке,
—коэффициент пропорциональности между выходной ЭДС и током в поперечной обмотке,  — постоянная времени цепи управления,
— постоянная времени цепи управления,  — индуктивность обмотки управления,
— индуктивность обмотки управления,  — постоянная времени поперечной цепи,
— постоянная времени поперечной цепи,  — индуктивность поперечной обмотки. Обычно
— индуктивность поперечной обмотки. Обычно  , их значения колеблются от сотых до десятых долей секунды. Коэффициент усиления по мощности для этого типа ЭМУ достигает
, их значения колеблются от сотых до десятых долей секунды. Коэффициент усиления по мощности для этого типа ЭМУ достигает  .
.
Возможно эта страница вам будет полезна:
Исполнительные устройства и объекты управления
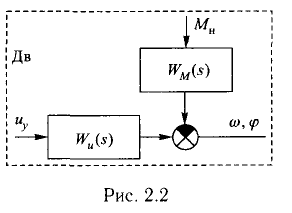
Двигатели постоянного тока. Двигатель постоянного тока с независимым возбуждением может быть представлен структурной схемой, приведенной на рис. 2.2, где  —передаточная функция относительно управляющего воздействия
—передаточная функция относительно управляющего воздействия  — передаточная функция относительно возмущения — момента нагрузки
— передаточная функция относительно возмущения — момента нагрузки  .
.
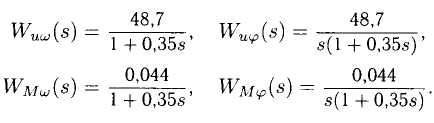
Когда выходом является угловая скорость, передаточная функция двигателя по управляющему воздействию 

и по возмущению 

Здесь
передаточный коэффициент двигателя по управлению,  — постоянная, зависящая от потока возбуждения и конструкции двигателя,
— постоянная, зависящая от потока возбуждения и конструкции двигателя,  — скорость холостого хода,
— скорость холостого хода,  — номинальная скорость,
— номинальная скорость,  — электрическая постоянная времени якоря,
— электрическая постоянная времени якоря,  — индуктивность обмотки якоря,
— индуктивность обмотки якоря,  — активное сопротивление обмотки якоря,
— активное сопротивление обмотки якоря,  — электромеханическая постоянная времени,
— электромеханическая постоянная времени,  — приведенный к валу двигателя суммарный момент инерции вращающихся частей,
— приведенный к валу двигателя суммарный момент инерции вращающихся частей,
передаточный коэффициент двигателя по возмущению (моменту нагрузки)  — постоянная, зависящая, как и , от потока возбуждения и конструкции двигателя,
— постоянная, зависящая, как и , от потока возбуждения и конструкции двигателя,  — номинальное напряжение управления.
— номинальное напряжение управления.  — пусковой момент.
— пусковой момент.
Для большинства двигателей выполняется неравенство  . Поэтому при расчете динамики САУ часто полагают
. Поэтому при расчете динамики САУ часто полагают  . При этом передаточные функции двигателя по управляющему воздействию
. При этом передаточные функции двигателя по управляющему воздействию  и по возмущению
и по возмущению  соответственно принимают вид
соответственно принимают вид

Если за выходную величину двигателя принять угол поворота вала  , то передаточные функции по управляющему воздействию
, то передаточные функции по управляющему воздействию  и по возмущению
и по возмущению  имеют вид
имеют вид

Задача №2.1.
Определить передаточные функции двигателя типа ДПМ-20-Н1/Н2-01.
Решение:
Для двигателя данного типа


Приведем единицы измерения параметров двигателя к системе СИ:

Скорость холостого хода двигателя

Рассчитаем передаточные коэффициенты двигателя по управлению и по возмущению:

Тогда получим передаточные функции двигателя
Асинхронные двигатели. Наиболее распространен индукционный двухфазный двигатель [1, 3, 8-10]. В динамическом отношении асинхронный двигатель рассматривается относительно угловой скорости как апериодическое звено и по управляющему воздействию  и по возмущению
и по возмущению  :
:
где параметры двигателя вычисляются по следующим формулам:

где  — пусковой ток ротора, равный току, потребляемому от сети,
— пусковой ток ротора, равный току, потребляемому от сети,  — момент инерции ротора.
— момент инерции ротора.
Задача №2.2.
Определить передаточные функции асинхронного двигателя типа АД-32Б. Технические характеристики двигателя этого типа:


Решение:
Угловая скорость двигателя при холостом ходе

Рассчитаем передаточные коэффициенты двигателя:

Тогда передаточные функции двигателя
Генератор постоянного тока. Генератор постоянного тока описывается дифференциальным уравнением первого порядка и он эквивалентен апериодическому звену [6]:
где  — выходное и входное напряжения генератора,
— выходное и входное напряжения генератора, 
 — передаточный коэффициент по управляющему воздействию,
— передаточный коэффициент по управляющему воздействию,  — активное сопротивление обмотки возбуждения, тор — константа, определяющая зависимость между ЭДС генератора
— активное сопротивление обмотки возбуждения, тор — константа, определяющая зависимость между ЭДС генератора  и током возбуждения
и током возбуждения  — постоянная времени генератора,
— постоянная времени генератора,  — индуктивность обмотки возбуждения.
— индуктивность обмотки возбуждения.
Передаточная функция генератора относительно возмущения ( — тока якоря)
— тока якоря)
где  — активное сопротивление цепи якоря.
— активное сопротивление цепи якоря.
Корректирующие элементы
При синтезе САУ для обеспечения ее устойчивости и требуемых показателей качества используют корректирующие элементы, в качестве которых применяют пассивные и активные четырехполюсники.
Пассивные четырехполюсники. Пассивные четырехполюсники представляют собой схемы из резисторов, конденсаторов и индуктив-ностей [5-7].
При вычислении передаточных функций четырехполюсников удобно воспользоваться операторными сопротивлениями: омическим  индуктивным
индуктивным  и емкостным
и емкостным  . При этом пассивные четырехполюсники можно рассчитывать как схемы, составленные из одних омических сопротивлений. Общая схема пассивного четырехполюсника показана на рис. 2.3, где
. При этом пассивные четырехполюсники можно рассчитывать как схемы, составленные из одних омических сопротивлений. Общая схема пассивного четырехполюсника показана на рис. 2.3, где  и
и  — операторные сопротивления.
— операторные сопротивления.
Передаточную функцию такого четырехполюсника можно записать следующим образом:

Задача № 2.3.
Рассчитать передаточную функцию четырехполюсника, показанного на рис. 2.4.
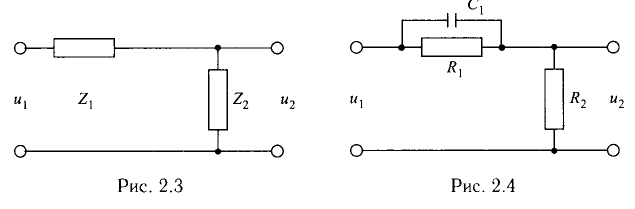
Решение:
В данном случае

Поэтому
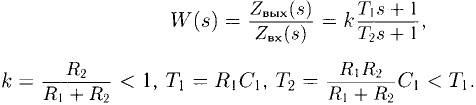
Если соединить последовательно два пассивных четырехполюсника через разделительный усилитель (рис. 2.5), то передаточная функция этой цепи

где  — коэффициент усиления усилителя,
— коэффициент усиления усилителя,  и
и  — передаточные функции четырехполюсников, включенных на входе и выходе усилителя.
— передаточные функции четырехполюсников, включенных на входе и выходе усилителя.
Эта формула справедлива при условии, что входное сопротивление усилителя достаточно велико.
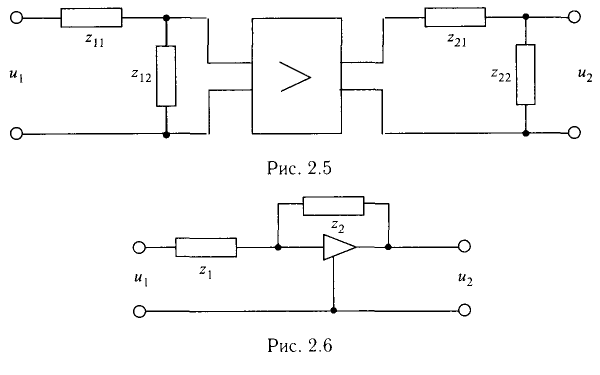
Активные четырехполюсники постоянного тока. В таких четырехполюсниках используются операционные усилители (УПТ) с высоким коэффициентом усиления [4. 6, 7, 9]. Общая схема активного четырехполюсника показана на рис. 2.6. Передаточная функция такого элемента
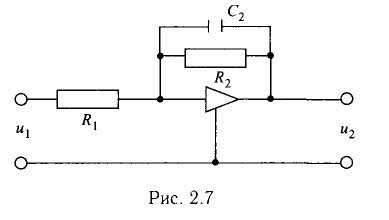
Задача №2.4.
Рассчитать передаточную функцию активного четырехполюсника, показанного на рис. 2.7.
Решение:
В данном случае

Поэтому

Сравнивающие устройства (СУ)
На рис. 2.8, а показана схема СУ, выполненная на линейных потенциометрах  и
и  , а на рис. 2.8, б — на кольцевых потенциометрах и .
, а на рис. 2.8, б — на кольцевых потенциометрах и .
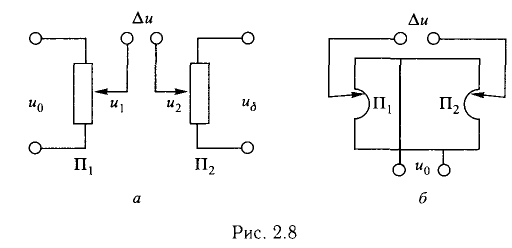
В обеих схемах сигнал ошибки  при равенстве задающего сигнала
при равенстве задающего сигнала  и сигнала обратной связи
и сигнала обратной связи  .
.
На рис. 2.9 показана мостовая схема СУ.
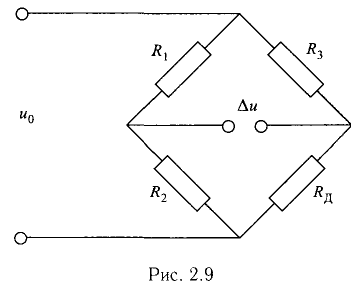
В частном случае в плечи моста могут быть включены активные сопротивления 
 и термосопротивление
и термосопротивление  . Если выполняется условие равновесия моста
. Если выполняется условие равновесия моста  , то сигнал ошибки
, то сигнал ошибки  . В общем случае в плечи моста могут быть включены, помимо активных сопротивлений, индуктивности и емкости.
. В общем случае в плечи моста могут быть включены, помимо активных сопротивлений, индуктивности и емкости.
Схема СУ может быть выполнена и на сельсинах, и на вращающихся трансформаторах. Принципиальная схема таких устройств может быть показана так, как на рис. 2.10.
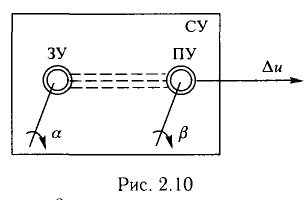
В качестве задающего (ЗУ) и приемного (ПУ) устройств могут использоваться и сельсины (СД-сельсин-датчик, СП-сельсин-приемник) и вращающиеся трансформаторы (ВТ-1 и ВТ-2). Сигнал ошибки при равенстве углов поворота задающей оси  и приемной оси
и приемной оси  .
.
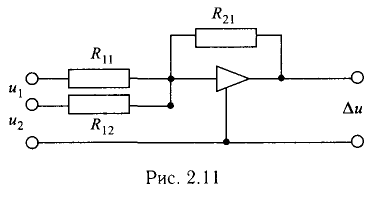
На рис. 2.11 показана схема СУ, выполненная на операционном усилителе (активном четырехполюснике). Сигнал ошибки при равенстве напряжений  .
.
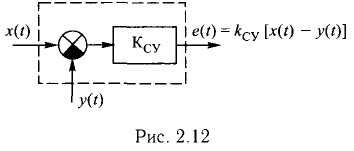
Для всех приведенных выше схем СУ (рис. 2.8-2.11) структурная схема показана на рис. 2.12, где  — входной сигнал,
— входной сигнал,  — сигнал обратной связи,
— сигнал обратной связи,  — сигнал ошибки,
— сигнал ошибки,  — передаточный коэффициент СУ.
— передаточный коэффициент СУ.
Устойчивость непрерывных систем управления
Основное условие устойчивости: для того чтобы непрерывная система управления была устойчива, необходимо и достаточно, чтобы все корни ее характеристического уравнения имели отрицательную вещественную часть.
На комплексной плоскости корни, имеющие отрицательную вещественную часть, располагаются в левой полуплоскости и поэтому называются левыми, корни, имеющие положительную вещественную часть, располагаются в правой полуплоскости и называются правыми, а корни, расположенные на мнимой оси, — нейтральными. Поэтому основное условие устойчивости можно также сформулировать еще так: для того чтобы система была устойчива, необходимо и достаточно, чтобы все корни характеристического уравнения были левыми.
Необходимое условие устойчивости. Для того чтобы система была устойчива, необходимо, чтобы все коэффициенты ее характеристического уравнения

были строго одного знака:

Характеристическое уравнение. Характеристический полином  (левая часть характеристического уравнения = 0) получается из собственного оператора
(левая часть характеристического уравнения = 0) получается из собственного оператора  простой заменой оператора
простой заменой оператора  на комплексную переменную
на комплексную переменную  . Если дано уравнение системы управления в символической форме, то дифференциальный оператор при выходной переменной и будет собственным оператором. Если дана передаточная функция, то собственный оператор (с точностью до обозначения переменной) совпадает с ее знаменателем.
. Если дано уравнение системы управления в символической форме, то дифференциальный оператор при выходной переменной и будет собственным оператором. Если дана передаточная функция, то собственный оператор (с точностью до обозначения переменной) совпадает с ее знаменателем.
При исследовании замкнутой системы (рис. 3.1, а) нет необходимости находить ее передаточную функцию, если известна передаточная функция  разомкнутой системы (рис. 3.1, б).
разомкнутой системы (рис. 3.1, б).
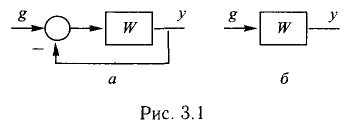
Ее собственный оператор равен сумме операторов числителя и знаменателя передаточной функции разомкнутой системы: 
Алгебраические критерии устойчивости
При проведении исследования устойчивости с помощью алгебраических критериев следует, прежде всего, записав характеристическое уравнение, проверить выполнение необходимого условия устойчивости, так как его проверка не требует никаких вычислений и в то же время при его невыполнении не надо проводить дальнейших исследований.
Определители Гурвица. Из коэффициентов характеристического полинома

составим определитель  -го порядка
-го порядка
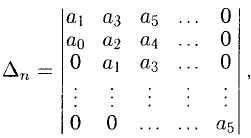
который строится следующим образом. На главной диагонали выписываются элементы  . Затем, двигаясь от этих элементов вверх, помещаются коэффициенты в порядке возрастания индексов, вниз — в порядке их убывания. Например, при построении
. Затем, двигаясь от этих элементов вверх, помещаются коэффициенты в порядке возрастания индексов, вниз — в порядке их убывания. Например, при построении  -го столбца, двигаясь от элемента
-го столбца, двигаясь от элемента  вверх, записываются коэффициенты
вверх, записываются коэффициенты  вниз — коэффициенты
вниз — коэффициенты  При этом, если индекс превышает или принимает отрицательное значение, то вместо соответствующего коэффициента записывают нуль. Определитель
При этом, если индекс превышает или принимает отрицательное значение, то вместо соответствующего коэффициента записывают нуль. Определитель  и его главные миноры
и его главные миноры

называют определителями Гурвица.
Критерий Гурвица (Hurwitz, 1895). Для того чтобы система была устойчива, необходимо и достаточно, чтобы все определители Гурвица, составленные из коэффициентов ее характеристического уравнения, при  были больше нуля:
были больше нуля:

Критерий Льенара—Шипара (Lienard, Chipard, 1914). При выполнении необходимого условия  0, для устойчивости системы управления необходимо и достаточно, чтобы все ее определители Гурвица с четными индексами или все ее определители Гурвица с нечетными индексами были положительными’.
0, для устойчивости системы управления необходимо и достаточно, чтобы все ее определители Гурвица с четными индексами или все ее определители Гурвица с нечетными индексами были положительными’.
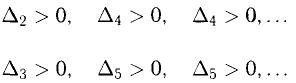
Для уменьшения вычислений целесообразно при нечетном использовать условие (3.1а), а при четном — условие (3.16).
Выпишем необходимые и достаточные условия устойчивости для = 1.2,3:

Задача №3.1.
Передаточная функция разомкнутой системы имеет вид

Исследовать устойчивость разомкнутой и замкнутой систем.
Решение:
Характеристический полином разомкнутой системы имеет вид

Все коэффициенты больше нуля и определитель  = 0,5 -4 — 1 — I — = 1 > 0. Поэтому по критерию Льенара—Шипара разомкнутая система устойчива.
= 0,5 -4 — 1 — I — = 1 > 0. Поэтому по критерию Льенара—Шипара разомкнутая система устойчива.
Характеристический полином замкнутой системы

Все коэффициенты этого полинома при обоих значениях  положительны, а определитель при = 0,5
положительны, а определитель при = 0,5

а при = 2

Следовательно, замкнутая система при = 0,5 устойчива, а при = 2 неустойчива.
Частотные критерии устойчивости
Критерий Найквиста (Nyqvist, 1932). Для того чтобы замкнутая система (с отрицательной обратной связью) была устойчива, необходимо и достаточно, чтобы амплитудно-фазовая частотная характеристика (АФЧХ) разомкнутой системы охватывала  раз в положительном направлении точку
раз в положительном направлении точку  , где
, где  — число правых корней характеристического уравнения разомкнутой системы.
— число правых корней характеристического уравнения разомкнутой системы.
Если разомкнутая система устойчива  , для устойчивости замкнутой системы необходимо и достаточно, чтобы АФЧХ разомкнутой системы не охватывала точку .
, для устойчивости замкнутой системы необходимо и достаточно, чтобы АФЧХ разомкнутой системы не охватывала точку .
Задача №3.2.
Исследовать устойчивость замкнутой системы, если передаточная функция разомкнутой системы имеет вид

Решение:
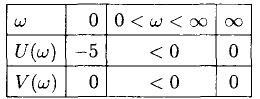
Частотные передаточные функции и вещественные и мнимые частотные функции имеют вид:
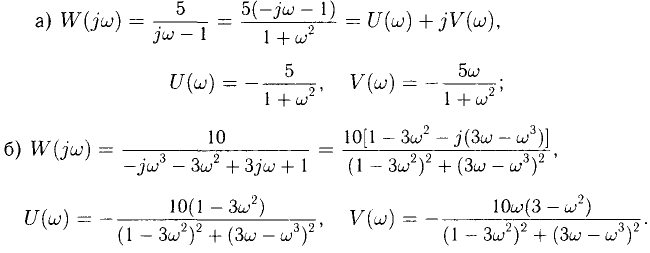
Для построения АФЧХ нужно определить координаты точек ее пересечения с осями координат и соединить эти точки плавной кривой. Необходимые расчетные данные приведены в таблице 3.1. На основе этих данных построены АФЧХ (рис. 3.2).
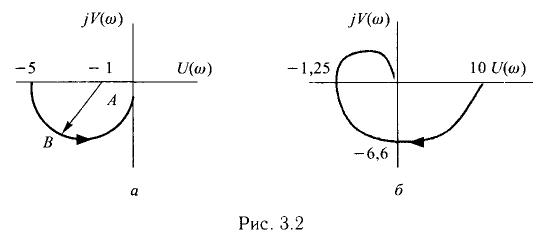
Расчетные данные к примеру 3.4
Расчетные данные к примеру 3.2. б)

В случае а) замкнутая система устойчива, так как = 1 и АФ-ЧХ охватывает точку 1/2 раз в положительном направлении (рис. 3.2, а). В случае б) замкнутая система неустойчива, так как разомкнутая система устойчива ( = 0), а АФЧХ охватывает точку (рис.3.2, б).
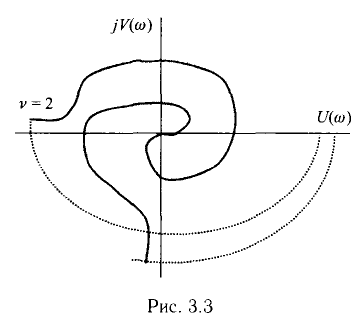
Случай наличия нулевых корней. Если характеристическое уравнение разомкнутой системы имеет нулевые корни, т. е. ее передаточная функция может быть представлена в виде

то АФЧХ при  уходит в бесконечность (рис. 3.3). В этом случае АФЧХ дополняются дугой —
уходит в бесконечность (рис. 3.3). В этом случае АФЧХ дополняются дугой — окружности большого радиуса (на рис. 3.3 — пунктирная линия). И для устойчивости замкнутой системы должна охватывать раз или при = 0 не охватывать точку дополненная АФЧХ.
окружности большого радиуса (на рис. 3.3 — пунктирная линия). И для устойчивости замкнутой системы должна охватывать раз или при = 0 не охватывать точку дополненная АФЧХ.
Устойчивость систем с чистым запаздыванием
Рассмотрим замкнутую систему управления, передаточная функция разомкнутой системы которой имеет вид

где  — полиномы степени
— полиномы степени  и
и  соответственно
соответственно  . Для исследования устойчивости такой системы может быть использован критерий Найквиста.
. Для исследования устойчивости такой системы может быть использован критерий Найквиста.
Для того чтобы замкнутая система, передаточная функция которой в разомкнутом состоянии имеет вид (3.2), была устойчива, необходимо и достаточно, чтобы АФЧХ разомкнутой системы охватывала точку в положительном направлении /2 раз, где — число правых нулей характеристического полинома разомкнутой системы  .
.
Замкнутая система со звеном чистого запаздывания, будучи устойчивой при малом  , с ростом ее АФЧХ в разомкнутом состоянии может приближаться к точке и при некотором значении
, с ростом ее АФЧХ в разомкнутом состоянии может приближаться к точке и при некотором значении  пересечь ее, и замкнутая система окажется на границе устойчивости. Запаздывание
пересечь ее, и замкнутая система окажется на границе устойчивости. Запаздывание  называют критическим.
называют критическим.
Частотная передаточная функция и амплитудная и фазовая частотные функции разомкнутой системы имеют вид

где

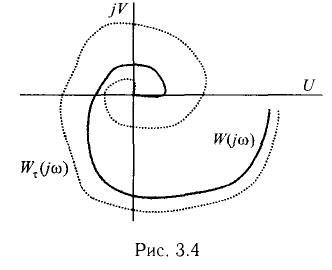
Отсюда видно, что появление чистого запаздывания не меняет модуль, а только вносит дополнительный отрицательный фазовый сдвиг  , что приводит к закручиванию АФЧХ (рис. 3.4).
, что приводит к закручиванию АФЧХ (рис. 3.4).
Критическое запаздывание находится из условий

Решив эту систему, найдем критическое запаздывание и частоту  , которая называется критической частотой.
, которая называется критической частотой.
Задача №3.3.
Определить критическое запаздывание и критическую частоту для системы, у которой передаточная функция в разомкнутом состоянии
Решение:
Без запаздывания замкнутая система устойчива. Условие (3.3) принимает вид

Отсюда получаем

Определение области устойчивости
Структура системы определяется составом элементов (звеньев) и связями между ними. При заданной структуре какие-либо параметры могут быть не фиксированными, т. е. их можно изменять. Такие параметры называют варьируемыми. Областью устойчивости в пространстве параметров называют множество всех значений варьируемых параметров, при которых система устойчива.
Если существует область устойчивости в пространстве параметров, то система называется структурно устойчивой (относительно заданных варьируемых параметров). В противном случае система называется структурно неустойчивой (относительно заданных варьируемых параметров).
Область устойчивости можно определить с помощью алгебраических критериев устойчивости. Рассмотрим это на примере.
Задача №3.4.
Передаточная функция разомкнутой системы  . Определить область устойчивости замкнутой системы на плоскости параметров
. Определить область устойчивости замкнутой системы на плоскости параметров  .
.
Решение:
Характеристический полином замкнутой системы имеет вид

По критерию Льенара—Шипара имеем

Очевидно, эти неравенства будут выполнены, если

Эта система неравенств определяет область устойчивости.
Робастная устойчивость
Рассмотрим характеристический полином

Введем в рассмотрение  -мерный вектор
-мерный вектор  . Пусть в
. Пусть в  -мерном пространстве коэффициентов задано множество
-мерном пространстве коэффициентов задано множество  . Полином
. Полином  называется робастно устойчивым или робастно устойчивым в
называется робастно устойчивым или робастно устойчивым в  , если он является устойчивым (т. е. все его нули являются левыми) при любых значениях коэффициентов из множества
, если он является устойчивым (т. е. все его нули являются левыми) при любых значениях коэффициентов из множества  . Система называется робастно устойчивой или робастно устойчивой на множестве , если ее характеристический полином является робастно устойчивым полиномом на множестве .
. Система называется робастно устойчивой или робастно устойчивой на множестве , если ее характеристический полином является робастно устойчивым полиномом на множестве .
Полиномы Харитонова. Пусть множество А является (гиперпараллелепипедом:

Здесь  и
и  — минимальное и максимальное значения коэффициента
— минимальное и максимальное значения коэффициента

Полиномы

со следующими коэффициентами (коэффициенты выписаны в порядке убывания индексов)
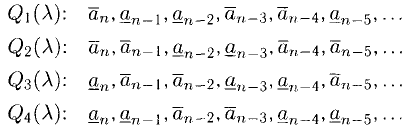
называются полиномами Харитонова.
Необходимое условие робастной устойчивости. Так как при робастной устойчивости в параллелепипеде (3.4) должны быть устойчивыми характеристические полиномы при всех значениях коэффициентов из этого параллелепипеда, необходимо, чтобы был устойчивым характеристический полином при значениях коэффициентов 
 . Поэтому для робастной устойчивости на множестве (3.4) необходимо, чтобы при
. Поэтому для робастной устойчивости на множестве (3.4) необходимо, чтобы при  выполнялось условие
выполнялось условие

Теорема Харитонова (1978). Для того чтобы система с характеристическим полиномом

была робастно устойчива на множестве (3.4), необходимо и достаточно, чтобы все полиномы Харитонова были устойчивыми.
В случае, когда = 1,2,3,4,5, нет необходимости проверять устойчивость всех четырех полиномов Харитонова. При = 1,2 необходимое условие (3.6) является и достаточным. В случае выполнения необходимого условия робастной устойчивости для того, чтобы система была робастно устойчива на множестве (3.4), необходимо и достаточно:
а) при  = 3 был устойчивым полином Харитонова
= 3 был устойчивым полином Харитонова  ;
;
б) при = 4 были устойчивыми полиномы Харитонова и  ;
;
в) при = 5 — полиномы Харитонова  .
.
Задача №3.5.
Исследовать робастную устойчивость системы, характеристический полином которой имеет вид

Решение:
В данном случае
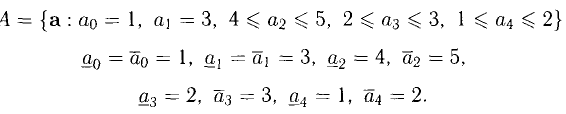
Так как = 4 и выполняется необходимое условие робастной устойчивости, достаточно рассмотреть полиномы Харитонова и  .
.
Из (3.5а) и (3.56) имеем

или

Необходимое условие устойчивости для обоих полиномов выполняется. Для полинома определитель Гурвица

а для полинома

На основе критерия Льенара—Шипара и являются устойчивыми полиномами. Следовательно, система робастно устойчива.
Задача №3.6.
Исследовать устойчивость замкнутой системы, если передаточная функция разомкнутой системы имеет вид

Решение:
Характеристический полином замкнутой системы имеет вид

где

Коэффициенты характеристического полинома удовлетворяют следующим условиям:

Следовательно, в принятых выше обозначениях имеем

Необходимое условие робастной устойчивости выполняется. Так как = 3, для робастной устойчивости необходимо и достаточно, чтобы полином был устойчивым. Из (3.5а)

Определитель Гурвица

Поэтому замкнутая система не будет робастно устойчива. Теорема Харитонова справедлива при условии, что коэффициенты характеристического полинома изменяются на заданных интервалах независимо друг от друга. В противном случае устойчивость полиномов Харитонова является только достаточным условием робастной устойчивости.
Задача №3.7.
Исследовать устойчивость замкнутой системы при всевозможных заданных значениях параметров при условии, что передаточная функция разомкнутой системы имеет вид

Решение:
Характеристический полином замкнутой системы имеет вид

где

Для граничных значений коэффициентов характеристического полинома имеем

Необходимое условие робастной устойчивости выполняется. И так как = 3, достаточно рассмотреть полином (3.5а):

Все коэффициенты больше нуля, но определитель Гурвица

Следовательно, полином не является устойчивым, т.е. условие робастной устойчивости не выполняется. Однако, в данном случае коэффициенты характеристического полинома не являются независимыми и теорема Харитонова определяет только достаточное условие робастной устойчивости. В действительности, как покажем, замкнутая система устойчива при всевозможных заданных значениях параметров.
При положительных значениях параметров необходимое условие устойчивости выполняется и определитель Гурвица

будет положительным при  .
.
Следовательно, система устойчива при любых значениях параметров из области, определяемой неравенствами  . Очевидно, заданные значения параметров принадлежат этой области.
. Очевидно, заданные значения параметров принадлежат этой области.
Качество систем управления. Показатели качества в переходном режиме
Показатели качества делятся на показатели качества в переходном режиме и показатели качества в установившемся режиме.
Показатели качества в переходном режиме делятся на прямые и косвенные. Последние делятся на корневые, частотные и интегральные.
Прямыми показателями качества называются показатели, которые получаются непосредственно по переходной характеристике. Из прямых показателей качества наиболее часто используют время регулирования и перерегулирование.
Временем регулирования  называют минимальное время, по истечении которого отклонение выходной величины от установившегося значения
называют минимальное время, по истечении которого отклонение выходной величины от установившегося значения  не превышает некоторой заданной величины
не превышает некоторой заданной величины  (обычно принимают
(обычно принимают  , перерегулированием
, перерегулированием  — максимальное отклонение переходной функции от установившегося значения , выраженное в процентах по отношению к :
— максимальное отклонение переходной функции от установившегося значения , выраженное в процентах по отношению к :
где  — максимальное значение переходной функции.
— максимальное значение переходной функции.
Корневые показатели качества. В качестве корневых показателей используют степень устойчивости и колебательность (степень колебательности). Степенью устойчивости  системы управления (или характеристического полинома) называют расстояние от мнимой оси до ближайшего корня ее характеристического уравнения на комплексной плоскости, или
системы управления (или характеристического полинома) называют расстояние от мнимой оси до ближайшего корня ее характеристического уравнения на комплексной плоскости, или

степень колебательности системы (или ее характеристического полинома) можно определить следующим образом:
Здесь  — корни характеристического уравнения.
— корни характеристического уравнения.
При исследовании степени устойчивости удобно воспользоваться следующим преобразованием. Полином

преобразуем, сделав подстановку  . Тогда получим:
. Тогда получим:
Преобразование  соответствует сдвигу мнимой оси влево и преобразованный полином
соответствует сдвигу мнимой оси влево и преобразованный полином  будет устойчивым полиномом, если
будет устойчивым полиномом, если  — степень устойчивости исходного полинома), и неустойчивым полином, если
— степень устойчивости исходного полинома), и неустойчивым полином, если  . Поэтому исследование степени устойчивости полинома
. Поэтому исследование степени устойчивости полинома  сводится к исследованию устойчивости преобразованного полинома
сводится к исследованию устойчивости преобразованного полинома  .
.
Задача №4.1.
Задан характеристический полином

Исследовать, превышает ли степень устойчивости заданного полинома единицу.
Решение:
Убедимся сначала, что рассматриваемый полином является устойчивым полиномом, для чего вычислим определитель Гурвица 3-го порядка, составленный из его коэффициентов.

Полином является устойчивым. Сделаем подстановку  и вычислим коэффициенты преобразованного полинома. В данном случае
и вычислим коэффициенты преобразованного полинома. В данном случае  = 4 и
= 4 и  = 1. Поэтому из (4.1) имеем:
= 1. Поэтому из (4.1) имеем:

Без дальнейших вычислений ясно, что необходимое условие устойчивости преобразованного полинома не выполняется, и он является неустойчивым полиномом. Следовательно, степень устойчивости < 1.
Задача №4.2.
Определить, превышает ли единицу степень устойчивости характеристического полинома

Решение:
Сначала проверим устойчивость заданного полинома. Для этого достаточно проверить знак определителя Гурвица 2-го порядка:

Полином устойчив. Произведем подставку и найдем коэффициенты преобразованного полинома. В данном случае = 3 и = 1. Поэтому из (4.1) имеем
Преобразованное характеристическое уравнение имеет вид

Все корни этого уравнения  располагаются на мнимой оси. Следовательно, степень устойчивости рассматриваемой системы = 1.
располагаются на мнимой оси. Следовательно, степень устойчивости рассматриваемой системы = 1.
Интегральные показатели качества. В качестве интегральных оценок наиболее часто используют интегральную квадратическую ошибку (оценку)
и обобщенные интегральные квадратические оценки

Здесь  — переходная составляющая ошибки:
— переходная составляющая ошибки:  ,
,  — установившаяся ошибка;
— установившаяся ошибка;  — весовые константы.
— весовые константы.
Вычисление интегральных квадратических оценок. Из равенства Парсеваля
где
имеем
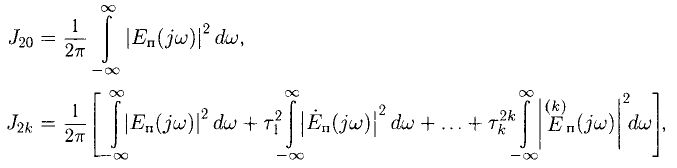
где

Так как

формулу для  можно записать в виде
можно записать в виде

Определение интегральных квадратических показателей сводится к вычислению интеграла вида

Этот интеграл вычисляется с помощью теории вычетов и для = 1,2,3 имеет следующий вид
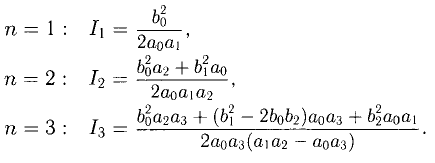
Задача №4.3.
Вычислить интегральные показатели  и системы (рис. 4.1, а), когда передаточная функция
и системы (рис. 4.1, а), когда передаточная функция
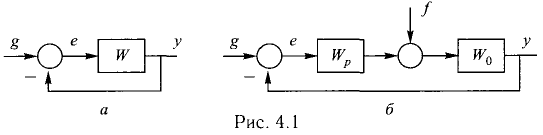
Решение:
Вычислим  и
и  , необходимые для нахождения указанных показателей. Но, прежде всего, найдем
, необходимые для нахождения указанных показателей. Но, прежде всего, найдем  . Учитывая, что
. Учитывая, что

можно записать

Установившееся значение

Так как

то

На основании свойства преобразования Лапласа

Интегральная квадратическая оценка имеет вид
В данном случае (4.2)

Поэтому согласно (4.3а)
Теперь найдем :

Так как

имеем

Показатели качества в установившемся режиме
Наиболее полной характеристикой качества системы в установившемся режиме является установившаяся ошибка. Если на систему действуют два внешних воздействия — задающее воздействие  и возмущение
и возмущение  — установившуюся ошибку можно представить в виде суммы:
— установившуюся ошибку можно представить в виде суммы:

где  и
и  — установившиеся ошибки от задающего воздействия и возмущения соответственно.
— установившиеся ошибки от задающего воздействия и возмущения соответственно.
Установившиеся ошибки и можно представить в виде ряда
где
Здесь  — передаточная функция относительно входа и выхода
— передаточная функция относительно входа и выхода  — передаточная функция относительно входа и выхода
— передаточная функция относительно входа и выхода  . Предполагается, что возмущение не приложено в одной точке с задающим устройством. Коэффициенты
. Предполагается, что возмущение не приложено в одной точке с задающим устройством. Коэффициенты  называются коэффициентами ошибки по задающему воздействию, коэффициенты
называются коэффициентами ошибки по задающему воздействию, коэффициенты  — коэффициентами ошибки по возмущению.Коэффициенты
— коэффициентами ошибки по возмущению.Коэффициенты  и
и  называют коэффициентами позиционной ошибки,
называют коэффициентами позиционной ошибки,  и
и  — коэффициентами скоростной ошибки,
— коэффициентами скоростной ошибки,  и
и  — коэффициентами ошибки по ускорению.
— коэффициентами ошибки по ускорению.
Статические и астатические системы. Установившаяся ошибка при постоянном внешнем воздействии называется статической ошибкой. Система называется статической, если статическая ошибка отлична от нуля, и астатической, если статическая ошибка равна нулю.
Система называется статической относительно задающего воздействия (возмущения), если статическая ошибка от задающего воздействия (возмущения) отлична от нуля, и астатической относительно задающего воздействия (возмущения), если статическая ошибка от задающего воздействия (возмущения) равна нулю.
Формулы (4.4) и (4.5) при постоянных  и
и  принимают вид
принимают вид

Отсюда следует, что система будет статической относительно воздействия (возмущения ), если  , и астатической относительно задающего воздействия (возмущения ), если
, и астатической относительно задающего воздействия (возмущения ), если 
 .
.
Говорят, что астатическая система обладает астатизмом  -го порядка относительно задающего воздействия, если
-го порядка относительно задающего воздействия, если

Аналогично определяется астатическая система с астатизмом -го порядка относительно возмущения.
Если система обладает астатизмом -го порядка, то коэффициенты ошибок  при
при  можно определить следующим образом:
можно определить следующим образом:

Иначе говоря, этими формулами можно пользоваться при вычислении до первого отличного от нуля коэффициента.
Задача №4.4.
Определить установившуюся ошибку системы (рис. 4.1, б) при

Решение:
Так как все производные от и производные выше 1-го порядка от равны нулю, то в данном случае

Поэтому для определения искомой ошибки достаточно вычислить коэффициенты ошибок

Передаточные функции ошибки имеют вид
Отсюда

Так как
можно вычислить по формуле (4.6).

Таким образом, для ошибок имеем:

Структура астатической системы управления. Для того чтобы система управления была астатической с астатизмом -го порядка относительно задающего воздействия, нужно, чтобы она содержала последовательно соединенных интегрирующих звеньев во всем замкнутом контуре.
Для того чтобы система управления была астатической с астатизмом -го порядка относительно возмущения, нужно, чтобы она содержала последовательно соединенных интегрирующих звеньев, включенных между точкой съема ошибки  и точкой приложения возмущения .
и точкой приложения возмущения .
Синтез систем управления
При выборе законов управления следует иметь в виду:
- введение в закон управления интегрирующего члена делает систему астатической и улучшает качество системы в установившемся режиме, но оказывает дестабилизирующее влияние (т. е. может сделать систему неустойчивой) и ухудшает качество системы в переходном режиме;
- введение в закон управления дифференцирующего члена оказывает стабилизирующее влияние (может сделать неустойчивую систему устойчивой) и улучшает качество системы в переходном режиме, не оказывая влияние на качество системы в установившемся режиме.
Задача №5.1.
Определить, при каких типовых законах управления статическая ошибка системы (рис. 5.1) будет равна нулю, когда передаточная функция объекта имеет вид

Решение:
Статическая ошибка будет равна нулю, если система будет астатической относительно задающего воздействия и возмущения. А для этого нужно, чтобы регулятор содержал интегрирующее звено. Поэтому искомыми законами управления будут пропорциональ-но-интегральный (ПИ) закон и пропорционально интегро-дифференци-альный (ПИД) закон.
Задача №5.2.
Определить, при каких типовых законах управления установившаяся ошибка системы (рис. 5.1) будет равна нулю при условии, что

Решение:
Так как установившаяся ошибка от задающего воздействия и возмущения имеют вид

установившаяся ошибка будет равна нулю, если  0. Следовательно, система должна быть астатической с астатизмом 2-го порядка относительно задающего воздействия и с астатизмом 1-го порядка относительно возмущения. Так как объект включает два последовательно соединенных интегрирующих звена, система будет астатической с астатизмом не менее 2-го порядка относительно задающего воздействия при любом типовом законе управления. Однако она будет астатической относительно возмущения только при ПИ-законе и ПИД-законе. При ПИ-законе передаточная функция разомкнутой системы
0. Следовательно, система должна быть астатической с астатизмом 2-го порядка относительно задающего воздействия и с астатизмом 1-го порядка относительно возмущения. Так как объект включает два последовательно соединенных интегрирующих звена, система будет астатической с астатизмом не менее 2-го порядка относительно задающего воздействия при любом типовом законе управления. Однако она будет астатической относительно возмущения только при ПИ-законе и ПИД-законе. При ПИ-законе передаточная функция разомкнутой системы
и характеристическое уравнение имеет вид

В этом уравнении коэффициент при  равен нулю и необходимое условие устойчивости не выполняется. Поэтому система при ПИ-законе структурно неустойчива. При ПИД-законе передаточная функция разомкнутой системы
равен нулю и необходимое условие устойчивости не выполняется. Поэтому система при ПИ-законе структурно неустойчива. При ПИД-законе передаточная функция разомкнутой системы

и характеристическое уравнение имеет вид

Определитель Гурвица 3-го порядка
соответствующим выбором параметров регулятора можно сделать Следовательно, при ПИД-законе система структурно устойчива и искомым законом устойчива и искомым законом управления является ПИД-закон.
Синтез параметров регулятора по минимуму интегральных оценок
Постановку и решение задачи синтеза параметров регулятора по минимуму интегральной оценки рассмотрим на примерах.
Задача №5.3.
При условии, что

и

определить параметр  , при котором переходный процесс системы (рис. 5.1) является апериодическим и интегральная квадратическая ошибка
, при котором переходный процесс системы (рис. 5.1) является апериодическим и интегральная квадратическая ошибка  принимает минимальное значение.
принимает минимальное значение.
Решение:
Переходный процесс будет апериодическим, если корни характеристического уравнения рассматриваемой системы

будут вещественными, т. е. если детерминант этого уравнения

Так как  , то ошибка
, то ошибка  . Объект включает интегрирующее звено. Поэтому система является астатической задающего воздействия и статическая ошибка
. Объект включает интегрирующее звено. Поэтому система является астатической задающего воздействия и статическая ошибка  . Переменная составляющая ошибки
. Переменная составляющая ошибки

Переходя к изображениям Лапласа, получим:

Следовательно,

В данном случае (4.2)

Поэтому (4.36)

Очевидно, что  принимает минимальное значение при условии
принимает минимальное значение при условии  2,5; когда
2,5; когда  .
.
Задача №5.4.
При условии, что

и

(рис. 5.1), определить значение параметра  при котором обобщенная интегральная квадратическая оценка
при котором обобщенная интегральная квадратическая оценка  при
при  принимает минимальное значение.
принимает минимальное значение.
Решение:
Согласно формуле Парсеваля
Как было вычислено (см. пример 5.3),

Для  имеем:
имеем:

Поэтому
В данном случае


Подставив это выражение и выражение для в полученную выше формулу для , найдем

Из условия
следует, что достигает экстремума при  установить, чему (минимуму или максимуму) соответствует это значение, найдем вторую производную
установить, чему (минимуму или максимуму) соответствует это значение, найдем вторую производную
В точке экстремума эта производная положительна. Следовательно, в ней достигается минимум и соответственно решением будет = 2.
Синтез систем управления максимальной степени устойчивости
Задача синтеза систем управления максимальной степени устойчивости ставится следующим образом. Задана структура системы управления и требуется определить  ( — вектор параметров регулятора) из условия
( — вектор параметров регулятора) из условия
Здесь  называется оптимальной степенью устойчивости и
называется оптимальной степенью устойчивости и  — оптимальным (векторным) параметром. Число параметров регулятора (размерность вектора )
— оптимальным (векторным) параметром. Число параметров регулятора (размерность вектора )  не должно превышать
не должно превышать  — 1 ( — степень характеристического уравнения). Метод решения сформулированной задачи основан на условиях граничной устойчивости.
— 1 ( — степень характеристического уравнения). Метод решения сформулированной задачи основан на условиях граничной устойчивости.
Условия граничной (маргинальной) устойчивости. Система находится на границе устойчивости или имеет место граничная (маргинальная) устойчивость, если ее характеристический полином имеет нейтральные (т. е. расположенные на мнимой оси) нули и не имеет правых нулей. Такой полином называют маргинально устойчивым.
Рассмотрим полином с вещественными коэффициентами

Утверждение. 5.1 (необходимое условие маргинальной устойчивости). Если полином (5.1) маргинально устойчив, то все его коэффициенты неотрицательны:

Нуль  полинома (5.1) называют особым, если — также является нулем этого полинома. В частности, все нули, расположенные на мнимой оси, являются особыми.
полинома (5.1) называют особым, если — также является нулем этого полинома. В частности, все нули, расположенные на мнимой оси, являются особыми.
Утверждение. 5.2 Полином (5.1) маргинально устойчив и  нулей располагаются на мнимой оси в том и только в том случае, если выполняются следующие два условия:
нулей располагаются на мнимой оси в том и только в том случае, если выполняются следующие два условия:
1) старших определителей Гурвица равны нулю, а остальные  определителей положительны:
определителей положительны:

2) Полином (5.1) не имеет особых нулей, расположенных не на мнимой оси.
Утверждение. 5.3 При выполнении необходимого условия (5.2) особый нуль не может быть вещественным числом, и если имеются особые нули, расположенные не на мнимой оси, то их количество равно числу, кратному четырем.
Нейтральные нули полинома  имеют вид
имеют вид  и их число совпадает с числом действительных корней уравнения
и их число совпадает с числом действительных корней уравнения  , или системы уравнений
, или системы уравнений

Утверждение. 5.4 Для того чтобы все определители Гурвица полинома были равны нулю, необходимо и достаточно, чтобы все его коэффициенты с нечетными индексами были равны нулю.
Метод синтеза систем управления максимальной степени устойчивости. Метод решения задачи основан на преобразовании характеристического полинома

путем постановки  . При этой постановке преобразованный полином
. При этой постановке преобразованный полином
становится маргинально устойчивым полиномом. И для  выписываются условия маргинальной устойчивости, включающие условия (5.2), (5.3) и (5.4):
выписываются условия маргинальной устойчивости, включающие условия (5.2), (5.3) и (5.4):
Здесь  — определители Гурвица преобразованного полинома — Следует иметь в виду, что не все соотношения в (5.76) и (5.7в) являются независимыми.
— определители Гурвица преобразованного полинома — Следует иметь в виду, что не все соотношения в (5.76) и (5.7в) являются независимыми.
Рассматриваемый метод состоит в следующем: решается система (5.7) относительно неизвестных параметров регулятора и степени устойчивости  и находятся решения, у которых имеет наибольшее значение.
и находятся решения, у которых имеет наибольшее значение.
Утверждение. 5.5 Максимально возможная или граничная степень устойчивости устойчивого полинома  равна
равна

и она достигается, когда вещественные части всех нулей полинома равны между собой.
Поиск решения задачи синтеза максимальной степени устойчивости следует начинать со случая, когда степень устойчивости принимает граничное (максимально возможное) значение. Так как это возможно, когда все нули исходного полинома имеют одинаковые вещественные части или все нули преобразованного полинома располагаются на мнимой оси, условие маргинальной устойчивости (5.7) можно представить в виде
Если эта система не имеет решения, то нужно перейти к системе (5.7) и решить ее при  .
.
А) Синтез оптимальных по степени устойчивости параметров типовых регуляторов для объекта 2-го порядка
Рассмотрим синтез оптимальных по степени устойчивости параметров П- и ПИ-регуляторов для объекта 2-го порядка. Пусть передаточная функция объекта имеет вид

П-регулятор. Передаточная функция регулятора  и передаточная функция разомкнутой системы равна
и передаточная функция разомкнутой системы равна

Характеристический полином принимает вид

Для коэффициентов преобразованного полинома

в соответствии с (5.6) имеем
В данном случае условия граничной устойчивости (5.9) принимают следующий вид:
Решив эту систему, получим
Так как степень устойчивости принимает граничное значение, найденное решение является искомым. Здесь  — свободный параметр, пропорциональный степени колебательности.
— свободный параметр, пропорциональный степени колебательности.
ПИ-регулятор. Передаточная функция регулятора 
 и передаточная функция разомкнутой системы равна
и передаточная функция разомкнутой системы равна

Характеристический полином имеет вид

Коэффициенты преобразованного полинома

определяются следующим образом (5.6):
Условия граничной устойчивости (5.9) принимают вид

Из последнего уравнения (5.10) имеем  . Следовательно, неравенство в этом условии выполняется. Поэтому исключив его и подставив выражения для коэффициентов, условие (5.10) можно представить в виде
. Следовательно, неравенство в этом условии выполняется. Поэтому исключив его и подставив выражения для коэффициентов, условие (5.10) можно представить в виде
Решив эту систему, получим

Здесь — свободный параметр, представляющий собой мнимую часть комплексных корней характеристического уравнения синтезированной системы.
Б) Синтез оптимальных по степени устойчивости параметров ПД- и ПИД-регуляторов для объекта 3-го порядка
Рассмотрим синтез оптимальных по степени устойчивости параметров типовых регуляторов для объекта 3-го порядка. Пусть передаточная функция объекта имеет вид

ПД-регулятор. Передаточная функция регулятора 
 и передаточная функция разомкнутой системы
и передаточная функция разомкнутой системы

Характеристический полином замкнутой системы имеет вид

Для коэффициентов преобразованного полинома

имеем


Условия граничной устойчивости (5.9) для преобразованного полинома принимают вид

Из последнего равенства этого условия имеем  . Подставив в это и другие равенства условия маргинальной устойчивости выражения для
. Подставив в это и другие равенства условия маргинальной устойчивости выражения для  , получим
, получим
Решив эту систему, найдем

Здесь — свободный параметр, представляющий собой мнимую часть комплексных корней характеристического уравнения синтезированной системы.
ПИД-регулятор. Передаточная функция регулятора 
 и передаточная функция разомкнутой системы
и передаточная функция разомкнутой системы

Характеристический полином синтезируемой системы и преобразованный полином имеют соответственно вид

где
Условие маргинальной устойчивости (5.9) принимает вид

Неравенства  и
и  будут выполнены, если
будут выполнены, если  . Введя дополнительный параметр
. Введя дополнительный параметр  , последнее неравенство преобразуем в равенство
, последнее неравенство преобразуем в равенство

и условие маргинальной устойчивости можно записать в виде
Решив эту систему уравнений, получим

где свободные параметры  и являются мнимыми частями корней характеристического уравнения синтезированной системы
и являются мнимыми частями корней характеристического уравнения синтезированной системы

Синтез систем управления по желаемой передаточной функции или метод полиномиальных уравнений
При задании желаемой передаточной функции  и определении передаточной функции регулятора
и определении передаточной функции регулятора  необходимо учитывать физическую осуществимость определяемого регулятора и грубость синтезируемой системы.
необходимо учитывать физическую осуществимость определяемого регулятора и грубость синтезируемой системы.
Физическая осуществимость. Под физической осуществимостью или реализуемостью передаточной функции или системы, заданной этой передаточной функцией, понимают принципиальную возможность построения такой системы.
Передаточная функция физически осуществима, если степень числителя не больше степени ее знаменателя. Условие физической осуществимости передаточной функции

имеет вид
Грубость. Система называется грубой или робастной, если при малом изменении ее параметров свойство системы качественно не меняется. В случае линейной системы негрубость означает, что устойчивая система при малом изменении параметров становится неустойчивой.
При синтезе систем по желаемой передаточной функции грубость может быть нарушена, если правый полюс передаточной функции объекта компенсируется правым нулем передаточной функции регулятора и правый нуль объекта — правым полюсом регулятора.
Представим передаточную функцию объекта в виде
где  — полиномы с левыми нулями,
— полиномы с левыми нулями,  — полиномы с правыми и нейтральными нулями. Если полиномы
— полиномы с правыми и нейтральными нулями. Если полиномы  и
и  не содержат левых нулей, то равны константе; если они не содержат правых нулей, то следует принять равными единице.
не содержат левых нулей, то равны константе; если они не содержат правых нулей, то следует принять равными единице.
Передаточная функция регулятора синтезируемой системы имеет вид
где полиномы  и
и  определяются из полиномиального уравнения
определяются из полиномиального уравнения

Здесь  — характеристический полином синтезируемой системы.
— характеристический полином синтезируемой системы.
Условимся степень полинома обозначать буквой  с индексом, обозначающим сам полином. Например,
с индексом, обозначающим сам полином. Например,  будет обозначать степень полинома
будет обозначать степень полинома  . Коэффициенты полиномов и определяются из системы уравнений, которые получаются путем приравнивания коэффициентов при одинаковых степенях обеих частей полиномиального уравнения (5.12). Эта система разрешима при выполнении условия разрешимости
. Коэффициенты полиномов и определяются из системы уравнений, которые получаются путем приравнивания коэффициентов при одинаковых степенях обеих частей полиномиального уравнения (5.12). Эта система разрешима при выполнении условия разрешимости
Условие физической осуществимости регулятора (5.11):

При определении степеней неопределенных полиномов необходимо учитывать условие, получаемое из условия грубости:

Чтобы система (5.13)-(5.15) была разрешима, необходимо, чтобы порядок  характеристического полинома синтезируемой системы удовлетворял соотношению
характеристического полинома синтезируемой системы удовлетворял соотношению

Метод синтеза регулятора по желаемой передаточной функции состоит в следующем. Исходя из заданных требований к качеству синтезируемой системы задается характеристический полином с учетом условия (5.16). Из (5.13)—(5.15) определяют степени неопределенных полиномов  и
и  . Чтобы не усложнять регулятор, находят наименьшие возможные значения. Затем составляют полиномы и с неопределенными коэффициентами, подставляют их в полиномиальное уравнение и определяют неизвестные коэффициенты. Найденные полиномы и подставляют в (5.11) и получают искомую передаточную функцию регулятора.
. Чтобы не усложнять регулятор, находят наименьшие возможные значения. Затем составляют полиномы и с неопределенными коэффициентами, подставляют их в полиномиальное уравнение и определяют неизвестные коэффициенты. Найденные полиномы и подставляют в (5.11) и получают искомую передаточную функцию регулятора.
Задача №5.5.
Передаточная функция объекта имеет вид 
 . Определить передаточную функцию регулятора, при которой переходная составляющая ошибки
. Определить передаточную функцию регулятора, при которой переходная составляющая ошибки  изменяется в соответствии с функцией
изменяется в соответствии с функцией

и установившаяся ошибка равна нулю (рис. 5.1) при постоянном задающем воздействии  и отсутствии возмущения
и отсутствии возмущения  .
.
Решение:
Переходная составляющая ошибки будет изменяться в соответствии с заданной функцией, если характеристический полином синтезируемой системы имеет трехкратный корень, равный — 1  . Поэтому знаменатель желаемой передаточной функции имеет вид
. Поэтому знаменатель желаемой передаточной функции имеет вид
Числитель и знаменатель передаточной функции объекта раскладываются на множители

Степени полиномов равны

Статическая ошибка  , если система обладает астатизмом 1-го порядка
, если система обладает астатизмом 1-го порядка  относительно задающего воздействия. Так как объект содержит одно интегрирующее звено, можно принять
относительно задающего воздействия. Так как объект содержит одно интегрирующее звено, можно принять  . Условия (5.13)—(5.15) принимают вид
. Условия (5.13)—(5.15) принимают вид

Из последнего равенства = 2. Наименьшим удовлетворяющим приведенным условиям, является = 0. Поэтому

и

Подставив эти полиномы в полиномиальное уравнение (5.12), получим

Отсюда, приравнивая коэффициенты при одинаковых степенях, найдем

Подставляя эти полиномы, а также выражения для  и
и  в (5.11), получим искомую передаточную функцию регулятора
в (5.11), получим искомую передаточную функцию регулятора 
 .
.
Определение желаемой передаточной функции
Желаемая передаточная функция должна быть определена исходя из заданных требований к качеству синтезируемой системы. На ее выбор определенные ограничения накладывают условия грубости и физической осуществимости. В силу этих ограничений желаемая передаточная функция имеет вид
где  — множитель полинома числителя передаточной функции объекта с правыми нулями; — полином, определяемый в процессе синтеза. Поэтому определение желаемой передаточной функции практически сводится к выбору полинома .
— множитель полинома числителя передаточной функции объекта с правыми нулями; — полином, определяемый в процессе синтеза. Поэтому определение желаемой передаточной функции практически сводится к выбору полинома .
Передаточная функция вида
называется нормированной передаточной функцией или передаточной функцией в форме Вышнеградского. Нормированная передаточная характеризуется тем, что в знаменателе коэффициент при старшей степени и свободный член равны единице.
Желаемая передаточная функция, когда наряду с другими требованиями нужно обеспечить заданное время регулирования  , определяется следующим образом. По заданным требованиям к качеству синтезируемой системы, кроме требования к времени регулирования, находится стандартная нормированная передаточная функция вида (5.17) и для нее определяется время регулирования
, определяется следующим образом. По заданным требованиям к качеству синтезируемой системы, кроме требования к времени регулирования, находится стандартная нормированная передаточная функция вида (5.17) и для нее определяется время регулирования  . По полученному и заданному tp находится отношение
. По полученному и заданному tp находится отношение  . Коэффициенты желаемой передаточной функции
. Коэффициенты желаемой передаточной функции
определяются так:

Стандартные нормированные передаточные функции
Рассмотрим стандартные передаточные функции, которые не имеют нулей: числители являются константами. Так как значения этих констант не влияют на характер переходного процесса, примем их равными единице.
Передаточная функция с одинаковыми полюсами
обладает монотонной переходной характеристикой, неплохим быстродействием и среди передаточных функций  —го порядка с одинаковыми коэффициентами при
—го порядка с одинаковыми коэффициентами при  имеет наибольшую степень устойчивости. Ее знаменатель при = 4, 5, 6 принимает следующий вид:
имеет наибольшую степень устойчивости. Ее знаменатель при = 4, 5, 6 принимает следующий вид:

Оптимальная по быстродействию передаточная функция передаточная функция с полюсами, имеющими одинаковые действительные части  и мнимые части, образующие арифметические прогрессии с разностью и первым членом, равными
и мнимые части, образующие арифметические прогрессии с разностью и первым членом, равными  , и отношением
, и отношением  которому соответствует наименьшее время регулирования:
которому соответствует наименьшее время регулирования:
В таблице 5.1 представлены время регулирования при  и перерегулирование для приведенных стандартных нормированных передаточных функций.
и перерегулирование для приведенных стандартных нормированных передаточных функций.
Задача №5.6.
Передаточная функция объекта имеет вид

Синтезировать регулятор, при котором переходный процесс является монотонным, время регулирования  и статическая ошибка равна нулю.
и статическая ошибка равна нулю.
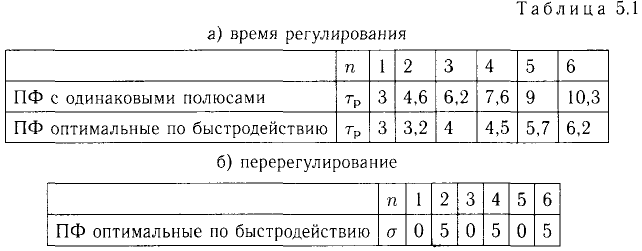
Решение:
Статическая ошибка будет равна нулю, если система будет астатической. Примем порядок астатизма  .
.
В качестве стандартной передаточной функции выберем нормированную передаточную функцию с одинаковыми полюсами

Для этой передаточной функции из табл. 5.1, а имеем  и поэтому
и поэтому

Учитывая формулы (5.186), для коэффициентов полинома знаменателя  желаемой передаточной функции получаем
желаемой передаточной функции получаем

и соответственно,

Числитель и знаменатель передаточной функции объекта раскладываются на множители

Степени полиномов равны

Условия (5.13), (5.14) и (5.15) принимают вид

Этим условиям удовлетворяют  и, соответственно,
и, соответственно,

При подстановке этих полиномов уравнение (5.12) принимает вид

Отсюда

и, соответственно

Подставляя их и выражения для  и
и  в (5.11), найдем искомую передаточную функцию
в (5.11), найдем искомую передаточную функцию
Метод обратной задачи динамики
Методом обратной задачи динамики называют метод синтеза систем, когда по заданным уравнению объекта и требованиям к качеству системы управления определяется дифференциальное уравнение, решение которого удовлетворяет заданным требованиям, а затем из найденного уравнения выражается старшая производная и, после подстановки ее вместо старшей производной в уравнение объекта, находится требуемый закон управления.
Задача №5.7.
Пусть задана передаточная функция объекта

Задан требуемый закон изменения  выходной переменной
выходной переменной  . Требуется найти алгоритм управления, при котором ошибка
. Требуется найти алгоритм управления, при котором ошибка 
 изменяется следующим образом:
изменяется следующим образом:

Здесь  — произвольные постоянные;
— произвольные постоянные;  — заданные положительные постоянные.
— заданные положительные постоянные.
Решение:
Уравнение объекта имеет вид

Числа  являются корнями уравнения
являются корнями уравнения

Следовательно, заданная функция  является общим решением дифференциального уравнения
является общим решением дифференциального уравнения

Так как

подставив эти выражения в уравнение объекта, получим

Математическое описание дискретных систем
Определение  -преобразования, -преобразованием или преобразованием Лорана называется соотношение
-преобразования, -преобразованием или преобразованием Лорана называется соотношение
ставящее дискретной функции  в соответствие функцию комплексного переменного
в соответствие функцию комплексного переменного  . При этом называют оригиналом, a — изображением или -изображением. Сумма в правой части называется рядом Лорана.
. При этом называют оригиналом, a — изображением или -изображением. Сумма в правой части называется рядом Лорана.
Оригинал и его изображение обозначают одноименными буквами: оригинал — строчной буквой, а изображение — прописной буквой со звездочкой. -преобразование также условно записывают в виде

а обратное -преобразование — в виде

-преобразование от смещенной решетчатой функции
называют модифицированным -преобразованием. Модифицированное -преобразование также записывают в виде

Функцию  называют -изображением смещенной решетчатой функции
называют -изображением смещенной решетчатой функции  или модифицированным -изображением решетчатой функции .
или модифицированным -изображением решетчатой функции .
Уравнения и передаточные функции дискретных систем
Пусть модель дискретной системы управления описывается разностным уравнением

где  — выходная переменная,
— выходная переменная,  — входная переменная,
— входная переменная, 
 и
и  — константы. Используя оператор смещения
— константы. Используя оператор смещения

это уравнение можно записать в операторной форме

Разностный оператор при выходной переменной

называется собственным (разностным) оператором, а разностный оператор при входной переменной

(разностным) оператором воздействия.
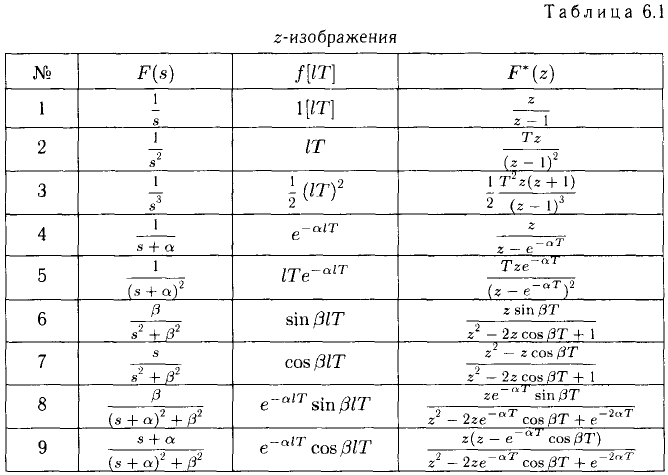
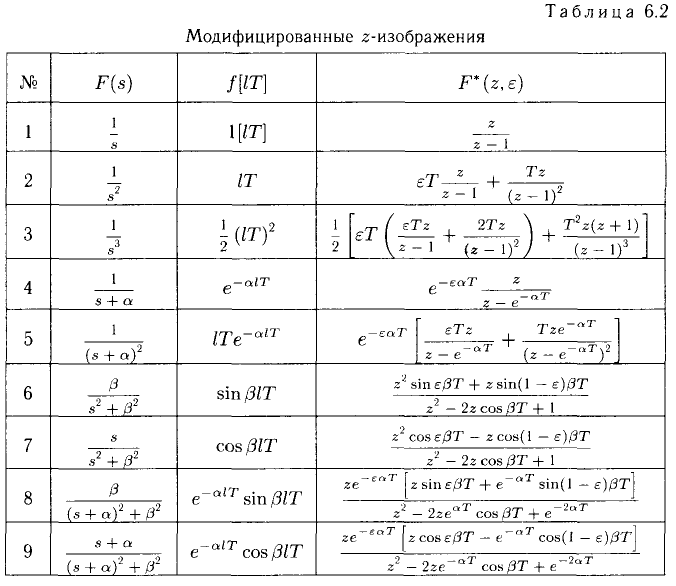
Отношение оператора воздействия к собственному оператору называется передаточной функцией в операторной форме. В соответствии с этим определением передаточная функция (в операторной форме) системы управления (6.1) имеет вид

Имеющее наименьший порядок отношение -изображений выходной и входной переменных, вычисленных при нулевых начальных условиях, называется передаточной функцией в -изображениях.
Передаточные функции в -преобразованиях  и в операторной форме
и в операторной форме  связаны соотношением
связаны соотношением

Однако если полиномы числителя и знаменателя имеют общие нули, то они должны быть сокращены.
Вычисление передаточных функций АИМ-системы
Как правило, приходится вычислять передаточные функции, когда известны характеристики дискретных элементов и передаточная функция непрерывной части. И в этом случае возникают особенности, которые делают вычисление передаточных функций дискретных систем более сложным.
АИМ-система включает АИМ-элемент (импульсный элемент с амплитудно-импульсной модуляцией) и непрерывную часть (рис. 6.2). Для получения математического описания АИМ-системы управления
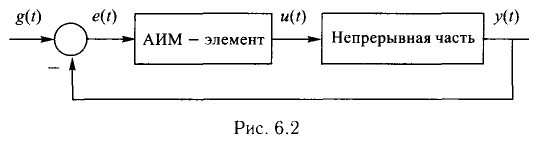
ее представляют в виде эквивалентной схемы, состоящей из простейшего импульсного звена 1 и приведенной непрерывной части (ПНЧ) (рис. 6.3, а). Простейшее импульсное звено представляет собой звено, которое преобразует входную функцию  в обобщенную решетчатую функцию
в обобщенную решетчатую функцию
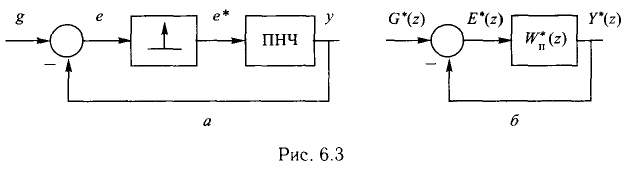
где  — период выходного сигнала АИМ-элемента. Передаточная функция ПНЧ равна произведению передаточных функций непрерывной части и формирующего звена. Формирующее звено (ФЗ) формирует из обобщенной решетчатой функции
— период выходного сигнала АИМ-элемента. Передаточная функция ПНЧ равна произведению передаточных функций непрерывной части и формирующего звена. Формирующее звено (ФЗ) формирует из обобщенной решетчатой функции  сигнал, тождественно равный выходному сигналу АИМ-элемента, и его передаточная функция равна изображению функции, описывающей немодулированный импульс.
сигнал, тождественно равный выходному сигналу АИМ-элемента, и его передаточная функция равна изображению функции, описывающей немодулированный импульс.
Если ограничиться изучением АИМ-системы только в дискретные моменты времени  , то получим дискретную модель (рис. 6.3, б), в которой передаточная функция
, то получим дискретную модель (рис. 6.3, б), в которой передаточная функция  равна -изображению решетчатой весовой функции ПНЧ:
равна -изображению решетчатой весовой функции ПНЧ:
Зная связь между изображением Лапласа непрерывной функции и -изображением соответствующей решетчатой функции (см. табл. 6.1), можно непосредственно по передаточной функции ПНЧ  определить . Для этого введем в рассмотрение оператор
определить . Для этого введем в рассмотрение оператор  , который каждой функции
, который каждой функции  ставит в соответствие функцию
ставит в соответствие функцию  :
:

Оператор соответствует трем последовательным операциям: обратному преобразованию Лапласа, квантованию по времени и  -преобразованию. Так как все три указанные операции являются линейными, то оператор является линейным. Используя этот оператор, передаточную функцию можно определить следующим образом:
-преобразованию. Так как все три указанные операции являются линейными, то оператор является линейным. Используя этот оператор, передаточную функцию можно определить следующим образом:
Дальше также используется оператор  который функции ставит в соответствие модифицированное -изображение
который функции ставит в соответствие модифицированное -изображение


По аналогии с -преобразованием в -преобразовании

и в -преобразовании

 называют оригиналом, а
называют оригиналом, а  -изображением и
-изображением и  — -изображением или модифицированным -изображением. и -изображения от основных функций можно найти в табл. 6.1 и 6.2 соответственно.
— -изображением или модифицированным -изображением. и -изображения от основных функций можно найти в табл. 6.1 и 6.2 соответственно.
Вычисление и -изображений. Пусть оригинал имеет вид
где  и
и  — полиномы от
— полиномы от  степени
степени  и
и  соответственно, причем
соответственно, причем  . Если все полюса
. Если все полюса  данной функции (т. е. корни уравнения = 0) различны, то
данной функции (т. е. корни уравнения = 0) различны, то
Задача №6.1.
Передаточная функция ПНЧ имеет вид 
Требуется найти дискретную передаточную функцию 
Решение:
Полюсами данной передаточной функции (т. е. корнями уравнения  ) являются
) являются  . Производная
. Производная  . Поэтому по формуле (6.2)
. Поэтому по формуле (6.2)

Если

содержит кратные полюса, то изображения  и
и  можно получить, разложив
можно получить, разложив  на элементарные дроби. В простых случаях можно введением малых параметров видоизменить функцию так, чтобы она не содержала кратных полюсов, и воспользоваться формулами (6.2) и (6.3), а затем произвести предельный переход, устремив малые параметры к нулю.
на элементарные дроби. В простых случаях можно введением малых параметров видоизменить функцию так, чтобы она не содержала кратных полюсов, и воспользоваться формулами (6.2) и (6.3), а затем произвести предельный переход, устремив малые параметры к нулю.
Задача №6.2.
Передаточная функция ПНЧ имеет вид 
 Требуется определить дискретную передаточную функцию
Требуется определить дискретную передаточную функцию  .
.
Решение:
Данная передаточная функция ПНЧ имеет двукратный полюс  . Введя малый параметр
. Введя малый параметр  , преобразуем ее к виду
, преобразуем ее к виду
Преобразованная передаточная функция имеет простые полюса  и
и  . Производная
. Производная  . По формуле (6.2)
. По формуле (6.2)
Используя разложение

где  — бесконечно малая величина более высокого порядка, чем , получаем
— бесконечно малая величина более высокого порядка, чем , получаем

Отсюда, устремив к нулю, находим

Если среди простых полюсов функции имеются комплексные корни, то может оказаться нецелесообразным использование формул (6.2) и (6.3). Это связано с необходимостью преобразования полученного результата для исключения мнимого числа. Во всех случаях, когда использование формул (6.2) и (6.3) невозможно или нецелесообразно, можно определить и , разложив на элементарные дроби.
Задача №6.3.
Определить  и
и  изображение функции
изображение функции
Решение:
Данная функция имеет кратный полюс и два комплексных полюса. Найдем и , разложив на элементарные дроби методом неопределенных коэффициентов:

Приравняв коэффициенты при одинаковых степенях слева и справа и решив полученную систему уравнений, найдем


Следовательно,

Преобразуем правую часть к табличному виду:

Подставив это выражение в предыдущее равенство, произведем -преобразование:

После подстановки соответствующих изображений из табл. 6.2 и преобразований получим
Положив  , находим
, находим

Вычисление — и -изображений от оригинала, включающего множитель  . Пусть оригинал имеет вид
. Пусть оригинал имеет вид
где — дробно-рациональная функция:

В этом случае в зависимости от величины  для
для  имеем
имеем
а) при


где
б) при


-преобразование обладает следующим свойством: если оригинал в -преобразовании содержит множитель, представляющий полином или дробно-рациональную функцию от  , то этот множитель можно вынести за знак оператора , произведя подстановку
, то этот множитель можно вынести за знак оператора , произведя подстановку  . Например,
. Например,
Задача №6.4.
АИМ-элемент вырабатывает прямоугольные импульсы длительности  с периодом
с периодом  и амплитудой (высотой)
и амплитудой (высотой)  . Передаточная функция непрерывной части
. Передаточная функция непрерывной части 
 . Требуется определить дискретную передаточную функцию
. Требуется определить дискретную передаточную функцию  .
.
Решение:
Найдем сначала передаточную функцию приведенной непрерывной части. Так как передаточная функция формирующего звена

передаточная функция ПНЧ
где
Дискретная передаточная функция

В данном случае

Согласно (6.4)

Полюсами  являются
являются  , производная
, производная 
 . В соответствии с (6.2) и (6.3)
. В соответствии с (6.2) и (6.3)
Следовательно,

Цифровые системы управления
Если цифровое устройство оперирует числовыми представлениями со значительным количеством разрядов, то- квантованием по уровню можно пренебречь. И системы управления с такими цифровыми устройствами можно рассматривать как АИМ-системы.
Цифровая система управления (ЦСУ) включает объект управления (ОУ), чувствительные элементы (ЧЭ), аналого-цифровой преобразователь (АЦП), цифровое вычислительное устройство (ЦВУ) и цифро-аналоговый преобразователь (ЦАП) (рис. 6.4). АЦП преобразует аналоговый сигнал в цифрой, а ЦАП — цифровой сигнал в аналоговый. ЦВУ выполняет все необходимые вычисления в соответствии с заданным алгоритмом управления, т. е. представляет собой регулятор.
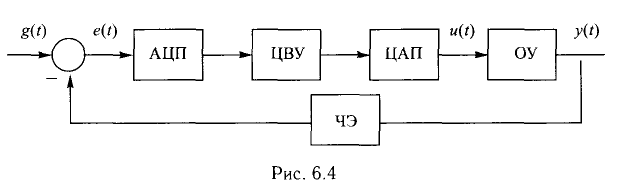
Если пренебречь квантованием по уровню, цифровую систему управления можно представить в виде блок-схемы (рис. 6.5), состоящей из прерывателя, дискретного фильтра (ДФ), фиксатора нулевого порядка (ФНП) и непрерывной части (НЧ).
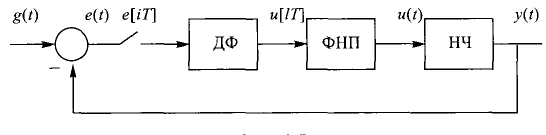
Прерыватель является моделью АЦП и преобразует непрерывный сигнал  в дискретный сигнал
в дискретный сигнал  . В дальнейшем прерыватель в явном виде на схеме не будем указывать, принимая, что он входит в состав ДФ. Дискретный фильтр представляет собой модель ЦВУ и характеризуется дискретной передаточной функцией — передаточной функцией регулятора. В качестве ЦАП чаще всего используется фиксатор нулевого порядка — элемент, который запоминает входной дискретный сигнал на один период — до прихода следующего дискретного сигнала. Фиксатор нулевого порядка можно рассматривать как АИМ-элемент, вырабатывающий прямоугольные импульсы длительности
. В дальнейшем прерыватель в явном виде на схеме не будем указывать, принимая, что он входит в состав ДФ. Дискретный фильтр представляет собой модель ЦВУ и характеризуется дискретной передаточной функцией — передаточной функцией регулятора. В качестве ЦАП чаще всего используется фиксатор нулевого порядка — элемент, который запоминает входной дискретный сигнал на один период — до прихода следующего дискретного сигнала. Фиксатор нулевого порядка можно рассматривать как АИМ-элемент, вырабатывающий прямоугольные импульсы длительности  (относительная длительность
(относительная длительность  ) и с амплитудой
) и с амплитудой  . Представив ФНП в виде эквивалентной схемы, состоящей из простейшего импульсного элемента и формирующего звена, получим эквивалентную схему цифровой системы управления (рис. 6.6).
. Представив ФНП в виде эквивалентной схемы, состоящей из простейшего импульсного элемента и формирующего звена, получим эквивалентную схему цифровой системы управления (рис. 6.6).
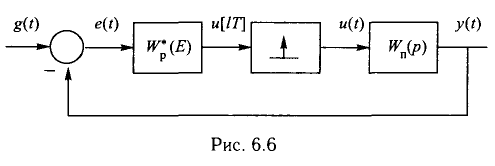
На этой схеме  — передаточная функция (в операторной форме) дискретного фильтра (регулятора),
— передаточная функция (в операторной форме) дискретного фильтра (регулятора),  — передаточная функция ПНЧ. Передаточная функция (в изображениях Лапласа) формирующего звена
— передаточная функция ПНЧ. Передаточная функция (в изображениях Лапласа) формирующего звена

Передаточная функция (в изображениях Лапласа) ПНЧ

Дискретная передаточная функция ПНЧ

или

Используя эту передаточную функцию, можно построить структурную схему дискретной модели цифровой системы управления (рис. 6.7).
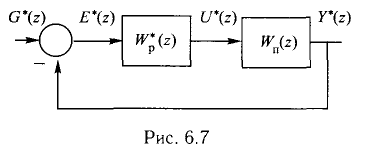
Задача №6.5.
Дана цифровая система управления, у которой передаточная функция непрерывной части
и цифровое вычислительное устройство реализует алгоритм управления, определяемый разностным уравнением

Требуется определить передаточную функцию данной системы относительно входа  и выхода
и выхода  (рис. 6.6).
(рис. 6.6).
Решение:
Запишем уравнение регулятора в операторной форме:

Отсюда передаточная функция регулятора в операторной форме
и в  -изображениях
-изображениях
Передаточная функция приведенной непрерывной части
Дискретная передаточная функция ПНЧ

Корнями полинома

являются


и производная

По формуле (6.2)

Следовательно,
Искомая передаточная функция замкнутой системы

ШИМ-системы управления
Блок-схема ШИМ-системы управления включает ШИМ-элемент (импульсный элемент с широтно-импульсной модуляцией) и НЧ (рис. 6.8). Пусть ШИМ-элемент вырабатывает прямоугольные импульсы с амплитудой  и периодом . На выходе ШИМ-элемента ширина модулированного импульса пропорциональна модулю
и периодом . На выходе ШИМ-элемента ширина модулированного импульса пропорциональна модулю  , а ее знак совпадает со знаком входного сигнала в момент съема. Модулированный импульс на выходе ШИМ-элемента можно представить как разность двух ступенчатых функций:
, а ее знак совпадает со знаком входного сигнала в момент съема. Модулированный импульс на выходе ШИМ-элемента можно представить как разность двух ступенчатых функций:

где 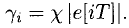 Здесь
Здесь  является константой, удовлетворяющей неравенству
является константой, удовлетворяющей неравенству

и называется коэффициентом модуляции.
Линеаризация. Уравнения ШИМ-элемента являются нелинейными. Если выполняется условие  или
или  , то можно произвести линеаризацию и получить дискретно-непрерывную модель (рис. 6.9 а), а после дискретизации — дискретную модель (рис. 6.9 б). Здесь
, то можно произвести линеаризацию и получить дискретно-непрерывную модель (рис. 6.9 а), а после дискретизации — дискретную модель (рис. 6.9 б). Здесь

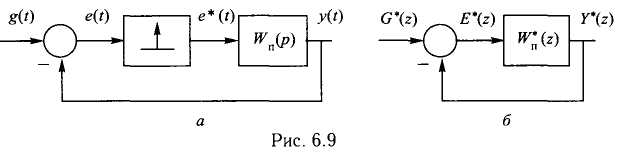
Задача №6.6.
Дана ШИМ-система управления (рис. 6.8). Амплитуда = 1, коэффициент модуляции = 0,05, период следования импульсов = 0,1 и передаточная функция непрерывной части

Требуется определить дискретную передаточную функцию замкнутой системы 
Решение:
Так как
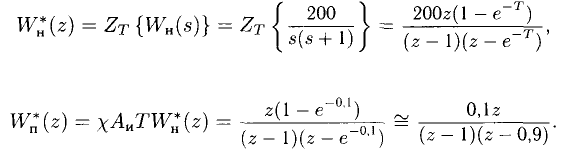
Искомая передаточная функция

Вычисление передаточных функций дискретных систем в общем случае
Выше мы рассмотрели вычисление передаточных функций дискретных систем, когда их эквивалентная схема за простейшим импульсным звеном содержит одно непрерывное звено — приведенную НЧ. Однако может потребоваться вычисление передаточных функций, эквивалентная схема которых имеет более общий вид (рис. 6.10). И в этом
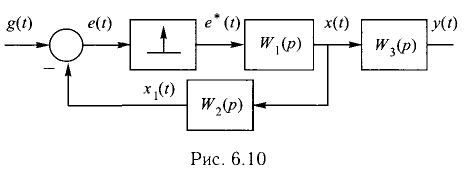
случае справедливо правило, которое совпадает с правилом вычисления передаточных функций одноконтурной непрерывной системы: передаточная функция относительно входа  и какого-либо выхода равна передаточной функции прямой цепи, деленной на единицу плюс (а при положительной обратной связи минус) передаточная функция разомкнутой системы. Согласно этому правилу имеем
и какого-либо выхода равна передаточной функции прямой цепи, деленной на единицу плюс (а при положительной обратной связи минус) передаточная функция разомкнутой системы. Согласно этому правилу имеем
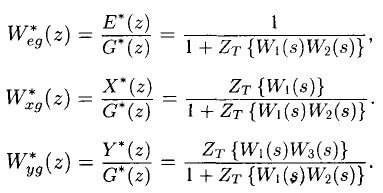
Следует иметь в виду, что при вычислении передаточной функции прямой цепи и передаточной функции разомкнутой системы непрерывные звенья, расположенные за простейшим импульсным звеном, нужно рассматривать как одну НЧ.
Теперь рассмотрим схему с дискретным фильтром, включенным перед простейшим импульсным звеном (рис. 6.11). Установленное выше правило вычисления дискретной передаточной функции замкнутой системы остается в силе и в данном случае:
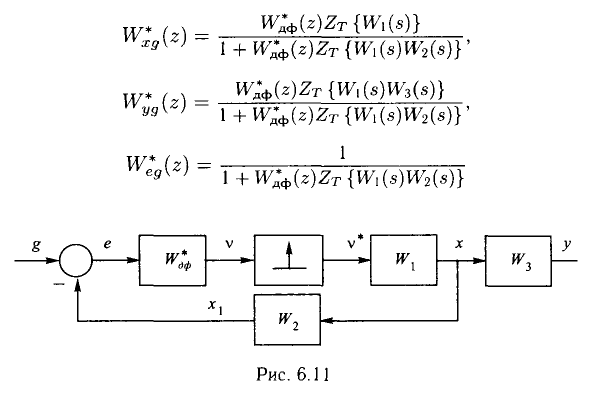
Задача №6.7.
Пусть в дискретной системе, представленной на рис. 6.11,

и период следования импульсов  = 0,1. Требуется определить передаточные функции
= 0,1. Требуется определить передаточные функции  и
и  .
.
Решение:
Найдем необходимые для определения требуемых передаточных функций  -изображения. Учитывая, что полином
-изображения. Учитывая, что полином  , как частный случай дробно-рациональной функции от
, как частный случай дробно-рациональной функции от  , можно вынести за знак оператора , сделав подстановку
, можно вынести за знак оператора , сделав подстановку  , получим
, получим
Подставив полученные выражения и выражения для  в выше-приведенные формулы, получим
в выше-приведенные формулы, получим

Устойчивость дискретных систем. Характеристическое уравнение и основное условие устойчивости
Если внешние воздействия заданы, уравнения дискретной системы управления можно записать в виде

или в операторной форме

Характеристическое уравнение имеет вид

который получается при подстановке в собственный оператор

вместо оператора смещения  переменной
переменной  .
.
Если задана передаточная функция системы управления, то при определении характеристического полинома нужно исходить из следующих положений: по определению передаточной функции в операторной форме ее знаменатель есть собственный оператор, а знаменатель передаточной функции в -изображениях совпадает с характеристическим полиномом (при условии, что передаточная функция в операторной форме не содержит одинаковые нули и полюса).
Общее решение неоднородного разностного уравнения имеет вид

где  — частное решение этого уравнения и
— частное решение этого уравнения и  — общее решение соответствующего однородного уравнения.
— общее решение соответствующего однородного уравнения.
Линейная дискретная система управления называется устойчивой, если общее решение однородного разностного уравнения при  стремится к нулю:
стремится к нулю:  .
.
Основное условие устойчивости: для того чтобы линейная дискретная система управления была устойчива, необходимо и достаточно, чтобы все корни ее характеристического уравнения были по модулю меньше единицы или, что то же, находились внутри единичного круга на -плоскости корней.
Задача №7.1.
Передаточная функция системы
Требуется исследовать ее устойчивость.
Решение:
Характеристическое уравнение имеет вид

Его корнями являются

Их модули

Система устойчива.
Алгебраические критерии устойчивости
Необходимое условие устойчивости: для того чтобы все нули (корни) характеристического полинома

были по модулю меньше единицы  необходимо, чтобы при
необходимо, чтобы при  выполнялись неравенства
выполнялись неравенства

Задача №7.2.
Характеристический полином дискретной системы имеет вид

Требуется определить устойчивость системы.
Решение:
Проверим необходимое условие устойчивости. В данном случае  и
и

Необходимое условие устойчивости не выполняется. Следовательно, система неустойчива.
Исследование устойчивости, основанное на преобразовании единичного круга в левую полуплоскость. При преобразовании

внутренность единичного круга на -плоскости преобразуется в левую полуплоскость, его внешность — в правую полуплоскость и окружность (единичного радиуса) — в мнимую ось на ^-плоскости. При таком преобразовании переменной характеристического уравнения для исследования устойчивости дискретных систем можно воспользоваться критериями устойчивости непрерывных систем (критерий Гурвица и др.).
Представим преобразованное характеристическое уравнение в стандартной форме:

При  = 1,2,3 коэффициенты преобразованного уравнения выражаются через коэффициенты исходного уравнения следующим образом:
= 1,2,3 коэффициенты преобразованного уравнения выражаются через коэффициенты исходного уравнения следующим образом:
Для того чтобы дискретная система была устойчива, необходимо и достаточно, чтобы все корни преобразованного характеристического уравнения располагались в левой полуплоскости (имели отрицательную вещественную часть).
Задача № 7.3.
Характеристический полином дискретной системы управления имеет вид

Определить ее устойчивость.
Решение:
В данном случае

и в соответствии с (7.2в) коэффициенты преобразованного уравнения
Необходимое условие устойчивости выполняется: все коэффициенты преобразованного характеристического уравнения больше нуля. Определитель Гурвица 2-го порядка

Следовательно, система устойчива.
Критерий устойчивости Джури. Составим таблицу Джури, которая содержит (+ 1) строку и столько же столбцов. При этом заполненные клетки имеют треугольную форму: нулевая строка содержит ( + 1) заполненных клеток, а все последующие строки имеют на единицу меньше заполненных клеток, чем предыдущая строка (табл. 7.1).
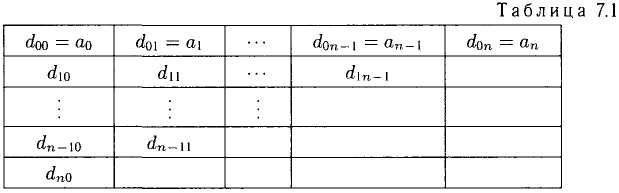
Клетки нулевой строки заполняются коэффициентами характеристического уравнения в порядке возрастания нижних индексов:


Элементы первой строки

вычисляются следующим образом. Выписываются элементы нулевой строки и под ними те же элементы в обратном порядке. Из элементов верхней строки вычитаются соответствующие элементы нижней строки, умноженные на отношение последних элементов двух выписанных строк:


Последняя разность обращается в нуль, и она отбрасывается. Поэтому 1-я строка содержит элементов — на один элемент меньше, чем нулевая строка. Элементы всех последующих строк определяются аналогично элементам 1-й строки. Так, например, для вычисления  -й строки выписываются элементы ( — 1)-й строки и под ними те же элементы в обратном порядке. Из элементов верхней строки вычитаются соответствующие элементы нижней строки, умноженные на отношение последних элементов выписанных двух строк
-й строки выписываются элементы ( — 1)-й строки и под ними те же элементы в обратном порядке. Из элементов верхней строки вычитаются соответствующие элементы нижней строки, умноженные на отношение последних элементов выписанных двух строк

Последняя разность, обращающаяся в нуль, отбрасывается. Формула для вычисления  -го элемента -й строки
-го элемента -й строки  имеет вид
имеет вид

Критерий Джури (E.I. Jury). Для того чтобы все нули (корни) характеристического полинома

находились внутри единичного круга, необходимо и достаточно, чтобы при все элементы нулевого столбца таблицы Джури были положительны:

Если все элементы нулевого столбца, кроме последнего, положительны:

то положительность последнего элемента, т. е. условие  > 0 эквивалентно необходимому условию устойчивости (7.1). Поэтому если необходимое условие выполняется, то последний элемент можно не вычислять.
> 0 эквивалентно необходимому условию устойчивости (7.1). Поэтому если необходимое условие выполняется, то последний элемент можно не вычислять.
Задача №7.4.
Характеристический полином дискретной системы управления имеет вид

Исследовать устойчивость данной системы.
Решение:
Сначала проверим необходимое условие устойчивости:

Необходимое условие устойчивости выполняется. Вычислим элементы таблицы Джури. Для нулевой строки имеем

Ниже приводится вычисление элементов таблицы Джури для остальных строк, кроме последней.
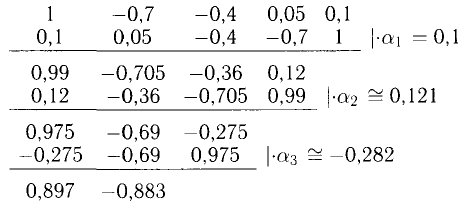
Элементы нулевого столбца (кроме последнего) равны

и они положительны. Так как выполняется необходимое условие устойчивости, последний элемент нулевого столбца также будет положительным. Следовательно, система устойчива.
Оценка качества дискретных систем. Показатели качества в переходном режиме
Качество дискретных систем управления определяется так же, как и качество непрерывных систем, и для его оценки можно использовать все ранее введенные при рассмотрении непрерывных систем показатели качества в переходном и установившемся режимах или их аналоги.
Прямые показатели качества — время регулирования и перерегулирование — определяются по переходной характеристике. Ее можно построить по дискретной переходной функции  , соединяя дискретные точки плавной кривой (рис. 8.1).
, соединяя дискретные точки плавной кривой (рис. 8.1).
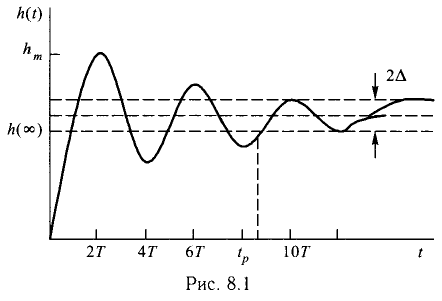
Рассмотрим вычисление переходной функции. Так как  -изображение от единичной решетчатой функции
-изображение от единичной решетчатой функции

то -изображение переходной функции

где  — передаточная функция относительно входа
— передаточная функция относительно входа  и выхода
и выхода  .
.
Пусть изображение переходной функции имеет вид

По определению -преобразования
Поэтому значения переходной функции можно найти, разложив  в ряд Лорана путем деления числителя
в ряд Лорана путем деления числителя  на знаменатель
на знаменатель  по правилу деления многочленов. При этом в многочленах и слагаемые должны располагаться в порядке убывания степени .
по правилу деления многочленов. При этом в многочленах и слагаемые должны располагаться в порядке убывания степени .
Задача №8.1.
Определить значения переходной функции  дискретной системы с передаточной функцией
дискретной системы с передаточной функцией
Решение:
-изображение переходной функции

Произведя деление числителя на знаменатель по правилу деления многочленов, для первых пяти слагаемых получим

Отсюда имеем:


Если разность между степенями знаменателя и числителя равна  , то первый член разложения в ряд Лорана будет иметь степень
, то первый член разложения в ряд Лорана будет иметь степень  . Поэтому первые значений будут равны нулю:
. Поэтому первые значений будут равны нулю:

Другой способ вычисления переходной функции основан на формуле разложения, которая определяется следующим образом: если все полюса  функции (т.е. корни уравнения = 0) простые и не равны нулю, то
функции (т.е. корни уравнения = 0) простые и не равны нулю, то

где
Начальные значения  при
при  и
и  при
при  .
.
Задача №8.2.
Определить переходную функцию , если -изображение имеет вид
Решение:
В данном случае

Производная

полюсами являются

И в соответствии с формулой (8.1)

Начальное значение , так как степень числителя меньше степени знаменателя. Если имеет кратные полюса, то полюсу  кратности
кратности  в формуле разложения соответствует слагаемое, определяемое предельным соотношением
в формуле разложения соответствует слагаемое, определяемое предельным соотношением

Если среди полюсов имеется нулевой ( = 0), то при вычислении соответствующего этому полюсу слагаемого следует пользоваться формулой (8.2) и в том случае, когда этот полюс является простым.
Задача №8.3.
Определить переходную функцию , если ее -изображение имеет вид
Решение:
В данном случае


Производная

полюсами являются

Слагаемое, соответствующее нулевому полюсу ( = 0), в соответствии с формулой (8.2) определяется следующим образом:
= 0), в соответствии с формулой (8.2) определяется следующим образом:

Полюс  =1 имеет кратность 2 и ему соответствует слагаемое
=1 имеет кратность 2 и ему соответствует слагаемое

Полюс  = —1 является простым и ему соответствует слагаемое (8.1)
= —1 является простым и ему соответствует слагаемое (8.1)

Таким образом, имеем

Начальное значение .
Вычисление переходной функции между точками съема сигналов . Функция  определяет значения переходной функции в моменты съема сигнала
определяет значения переходной функции в моменты съема сигнала  . Значения переходной функции
. Значения переходной функции  в промежуточные моменты времени можно определить по структурной схеме (рис. 8.2 б), которая получается из исходной (рис. 8.2 а) подключением на выходе звена чистого запаздывания. Из этих схем имеем
в промежуточные моменты времени можно определить по структурной схеме (рис. 8.2 б), которая получается из исходной (рис. 8.2 а) подключением на выходе звена чистого запаздывания. Из этих схем имеем

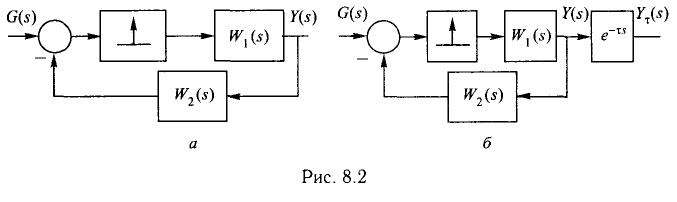
Так как
и при единичном входном воздействии и нулевых начальных условиях

Соответственно для  -изображений переходных функций и имеем:
-изображений переходных функций и имеем:


где
Задача №8.4.
Пусть в дискретной системе (рис. 8.2, a) 
 и период- следования импульсов
и период- следования импульсов  = 0,2. Требуется определить решетчатую функцию, которая принимает значения переходной функции
= 0,2. Требуется определить решетчатую функцию, которая принимает значения переходной функции  в моменты
в моменты

Решение:
Искомой функцией будет  , где
, где
В данном случае


Подставив эти выражения в (8.3), получим

Отсюда в соответствии с формулой (8.1)

Особенности переходного процесса дискретных систем.
В непрерывных линейных системах переходная функция всегда принимает установившееся значение при  . Однако возможны линейные дискретные системы, в которых переходный процесс полностью заканчивается за конечное число шагов, т. е. существует такое положительное число
. Однако возможны линейные дискретные системы, в которых переходный процесс полностью заканчивается за конечное число шагов, т. е. существует такое положительное число  , что
, что

Если выполняется это условие, то переходный процесс называется оптимальным, а система, в которой происходит такой процесс, — оптимальной (по переходному процессу) системой.
Условие оптимальности системы (по переходному процессу). В системе с передаточной функцией вида

переходный процесс заканчивается за конечное число шагов, если

Задача №8.5.
Замкнутая дискретная система состоит из фиксатора нулевого порядка и НЧ с передаточной функцией 
 период = 0,1. Определить параметр
период = 0,1. Определить параметр  , при котором переходный процесс будет оптимальным.
, при котором переходный процесс будет оптимальным.
Решение:
При фиксаторе нулевого порядка передаточная функция формирующего звена

Поэтому передаточная функция приведенной НЧ

и передаточная функция разомкнутой дискретной модели

Передаточная функция замкнутой системы

Отсюда в соответствии с формулой (8.4) для оптимального получаем

Показатели качества в установившемся режиме
Наиболее полной характеристикой качества в установившемся режиме является установившаяся ошибка  . Ее можно найти по
. Ее можно найти по  -изображению
-изображению  по формуле
по формуле
Здесь  определяется по рекуррентной формуле
определяется по рекуррентной формуле

Коэффициенты  называются коэффициентами ошибки и являются числовыми показателями качества в установившемся режиме.
называются коэффициентами ошибки и являются числовыми показателями качества в установившемся режиме.
Статические и астатические системы. Система называется статической, если статическая ошибка отлична от нуля, и астатической, если статическая ошибка равна нулю. Статическая ошибка — это установившаяся ошибка при постоянных внешних воздействиях. Система является астатической и обладает астатизмом  -го порядка, если первые коэффициентов равны нулю, а ( + 1)-й коэффициент ошибки отличен от нуля:
-го порядка, если первые коэффициентов равны нулю, а ( + 1)-й коэффициент ошибки отличен от нуля:

Из формул (8.56) и (8.5в) следует, что коэффициент позиционной ошибки  и для нахождения остальных коэффициентов необходимо вычислять производные от передаточной функции
и для нахождения остальных коэффициентов необходимо вычислять производные от передаточной функции  .
.
Однако для астатической системы коэффициенты до первого отличного от нуля можно определить по формуле

Задача №8.6.
Задающее воздействие  , передаточная функция ошибки относительно задающего воздействия
, передаточная функция ошибки относительно задающего воздействия

период = 0,05. Определить установившуюся ошибку.
Решение:
Так как


и установившаяся ошибка

Найдем коэффициенты ошибки  и
и  . В соответствии с формулами (8.56) и (8.5в)
. В соответствии с формулами (8.56) и (8.5в)

Так как = 0, то можно определить по формуле (8.6):

Установившаяся ошибка

Структура астатических систем. Дискретная система (рис. 8.6) будет астатической, если передаточная функция ДФ (регулятора) включает множитель 1/( — 1) или НЧ (а не ПНЧ) содержит интегрирующее звено. Порядок астатизма системы равен сумме числа последовательно соединенных интегрирующих звеньев в НЧ и показателю степени — 1 в знаменателе ДФ.
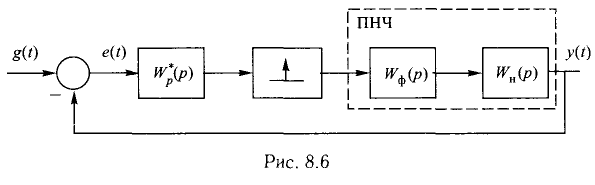
Задача №8.7.
Пусть в дискретной системе (рис. 8.6)

Задающее воздействие
Определить установившуюся ошибку.
Решение:
В данном случае установившаяся ошибка

Передаточная функция регулятора содержит в знаменателе множитель — 1 в первой степени, и НЧ содержит одно интегрирующее звено. Поэтому система обладает астатизмом второго порядка и
Следовательно,
Кстати готовые задачи на продажу по тау тут.
Синтез дискретных систем
Метод полиномиальных уравнений. Пусть задана передаточная функция приведенной НЧ  и соответственно известна дискретная передаточная функция неизменяемой части
и соответственно известна дискретная передаточная функция неизменяемой части
Из заданных требований к качеству синтезируемой системы получена желаемая передаточная функция  . Требуется синтезировать регулятор, при котором передаточная функция
. Требуется синтезировать регулятор, при котором передаточная функция  синтезированной системы (рис. 9.1) равна желаемой:
синтезированной системы (рис. 9.1) равна желаемой:
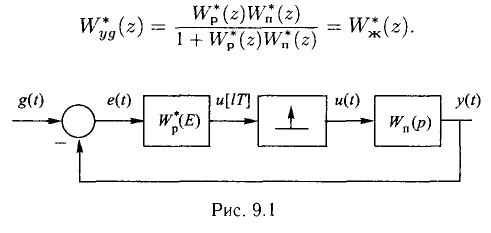
При синтезе регулятора нужно позаботится о том, чтобы он был физически осуществим и синтезированная система была грубой. Условие физической осуществимости регулятора, состоящее в том, что следствие не может предшествовать причине, будет выполнено, если степень числителя его передаточной функции не превышает степень ее знаменателя.
Условие грубости будет нарушено, если передаточная функция неизменяемой части содержит нули или полюса вне единичного круга, и они входят в передаточную функцию регулятора. И это условие накладывает определенные ограничения на выбор желаемой передаточной функции, что в общем случае исключает возможность задания желаемой передаточной функции произвольно. Поэтому обычно задаются желаемым характеристическим полиномом синтезируемой системы.
Разложим числитель и знаменатель передаточной функции неизменяемой части на два множителя, один из которых содержит нули внутри единичной окружности, другой — на и вне единичной окружности:
Здесь  — полиномы, нули которых расположены внутри единичной окружности;
— полиномы, нули которых расположены внутри единичной окружности;  — полиномы, нули которых расположены на и вне единичной окружности. Искомая передаточная функция регулятора имеет вид
— полиномы, нули которых расположены на и вне единичной окружности. Искомая передаточная функция регулятора имеет вид
где показатель степени множителя  определяется требуемым порядком астатизма,
определяется требуемым порядком астатизма,  и
и  — неопределенные полиномы, которые определяются из полиномиального уравнения
— неопределенные полиномы, которые определяются из полиномиального уравнения

Здесь  — желаемый характеристический полином (знаменатель желаемой передаточной функции).
— желаемый характеристический полином (знаменатель желаемой передаточной функции).
Обозначим степень произвольного полинома  через
через  . Тогда условие физической осуществимости можно записать в виде (9.2)
. Тогда условие физической осуществимости можно записать в виде (9.2)

Полиномиальное уравнение (9.3) разрешимо, если число неизвестных (коэффициентов полиномов и не меньше числа уравнений, получаемых приравниванием коэффициентов при одинаковых степенях в уравнении (9.3). И так как число неизвестных равно  , а число уравнений
, а число уравнений  условие разрешимости полиномиального уравнения принимает вид
условие разрешимости полиномиального уравнения принимает вид

Степень желаемого характеристического полинома  должна удовлетворять соотношению
должна удовлетворять соотношению

а также неравенству

где  — степень знаменателя передаточной функции неизменяемой части.
— степень знаменателя передаточной функции неизменяемой части.
Порядок синтеза системы управления методом полиномиальных уравнений можно сформулировать следующим образом.
- Разложить полиномы числителя и знаменателя передаточной функции неизменяемой части на два множителя, один из которых имеет нули внутри единичной окружности, другой — на и вне единичной окружности. Если указанные полиномы не имеют нулей на и вне единичной окружности, то положить
 и
и  ; если они не имеют нулей внутри единичной окружности, то приравнять
; если они не имеют нулей внутри единичной окружности, то приравнять  и
и  постоянному множителю этих полиномов.
постоянному множителю этих полиномов. - Исходя из требований к качеству синтезируемой системы в переходном режиме и порядку астатизма выбрать характеристический полином синтезируемой системы
 и число
и число  . Степень полинома должна удовлетворять условию (9.7).
. Степень полинома должна удовлетворять условию (9.7). - Из соотношений (9.4)-(9.6) определить степени неопределенных полиномов и и записать их с неизвестными коэффициентами.
- Подставить полученные неопределенные полиномы в полиномиальное уравнение (9.3) и определить их коэффициенты.
- Подставить найденные полиномы и в формулу для передаточной функции регулятора (9.2).
Для того чтобы синтезируемый регулятор был более простым, степени полиномов , и должны быть как можно меньшими.
Задача №9.1.
Передаточная функция неизменяемой части

Требуется синтезировать регулятор, при котором статическая ошибка равна нулю и переходный процесс заканчивается за конечное число шагов.
Решение:
В данном случае


и соответственно


Степени

Так как статическая ошибка должна быть равна нулю, положим = 1. Условие (9.7) принимает вид

Минимально допустимой является степень  , и для того чтобы переходный процесс закончился за конечное число шагов, полагаем характеристический полином
, и для того чтобы переходный процесс закончился за конечное число шагов, полагаем характеристический полином  . Из условия (9.6)
. Из условия (9.6)  , а из условий (9.4) и (9.5)
, а из условий (9.4) и (9.5)  . Поэтому полагаем
. Поэтому полагаем

Подставив их в полиномиальное уравнение (9.3), получим

или, после раскрытия скобок и приведения подобных членов,

Приравняв коэффициенты при одинаковых степенях, находим

Решив эту систему, получим

Следовательно,

Подставив эти выражения для  и
и  , а также выражения для
, а также выражения для  и
и  в (9.2), получим искомое решение
в (9.2), получим искомое решение


Точность системы автоматического управления Статическая ошибка системы
В системах
автоматического управления часто
приходится решать задачу стабилизации
управляемой величины. Точность поддержания
требуемого значения управляемой величины
в такой системе можно оценить как разницу
между заданным значением управляемой
величины и её установившимся значением
в системе после окончания переходного
процесса:
![]() .
.
Эта величина
получила название статической ошибки
системы. При вычислении статической
ошибки предполагается, что система
находится в статике и все сигналы в ней
имеют постоянные величины. Статическая
ошибка используется для оценки точности
установления в системе заданной
постоянной выходной величины после
окончания переходного процесса.
Используя
передаточную функцию замкнутой системы
по ошибке, для изображения ошибки в
системе можно записать
![]() ,
,
где![]() передаточная
передаточная
функция замкнутой системы по ошибке,![]() изображение
изображение
задающего воздействия.
Для статики,
когда все сигналы в системе неизменны,
выражение для ошибки можно перенести
в область оригиналов
![]() .
.
Поскольку
![]() ,
,
гдеW(p)
– передаточная функция разомкнутой
системы, то статическую ошибку системы
можно вычислить, зная передаточную
функцию разомкнутой системы:
![]() ,
,
где![]() .
.
Вместо
абсолютного значения статической ошибки
часто используют относительную
статическую ошибку
![]() .
.
Если система
статическая (т.е. не содержит интегрирующих
звеньев), то передаточную функцию
разомкнутой системы можно представить
в следующем нормированном виде:
![]() ,
,
гдеK– коэффициент
усиления системы,A*(p),B*(p)
– нормированные полиномыA(p)
иB(p).
При этом![]() и
и![]() .
.
Тогда![]() и статическая ошибка в статической
и статическая ошибка в статической
системе
![]() .
.
Статическая
ошибка в статической системе уменьшается
с увеличением коэффициента усиления
системы. Статическая система всегда
будет иметь некоторую ошибку. Физический
смысл такой ошибки заключается в
необходимости некоторого рассогласования
между задающей и выходной величинами
системы для получения сигнала управления.
Если в системе
управления имеются интегрирующие
звенья, то система будет астатической.
Для астатической системы первого порядка
(содержащей одно интегрирующее звено)
передаточная функция разомкнутой
системы
![]()
и передаточная функция замкнутой системы
по ошибке
 .
.
В этом случае всегда
![]() и, следовательно, статическая ошибка
и, следовательно, статическая ошибка
астатической системы будет равна нулю.
Таким образом, статическая ошибка в
астатической системе в принципе
отсутствует, что обуславливает более
высокую точность астатических систем,
по сравнению со статическими системами.
В астатической системе автоматического
управления установившееся значение
управляемой величины равно заданному
значению этой величины.
Вынужденная ошибка системы
Процесс в
системе складывается из свободного
процесса и вынужденного процесса:
![]() .
.
Для
устойчивой системы свободный процесс
по истечении времениtпзатухает и в системе устанавливается
вынужденный процесс
![]()
Точность
поддержания заданного значения
управляемой величины в вынужденном
режиме характеризуется вынужденной
ошибкой системы
![]() .
.
Вынужденная
ошибка хорошо характеризует работу
системы автоматического управления в
том случае, когда изменения управляющего
воздействия происходят существенно
медленнее собственных переходных
процессов в системе и последними можно
пренебречь.
Рассмотрим
вычисление вынужденной ошибки системы
автоматического управления. Изображение
для вынужденной ошибки
![]() .
.
В общем случае
![]() является дробно-рациональной функцией
является дробно-рациональной функцией
отpи ее можно разложить
в ряд Тейлора по степенямрвблизи![]() , тогда
, тогда
![]() и
и
выражение для вынужденной ошибки системы
примет вид
![]() где
где![]() постоянные
постоянные
коэффициенты.
Для полученного
изображения вынужденной ошибки на
основе свойств преобразования Лапласа
легко находится выражение для оригинала
ошибки
![]()
где
![]() ,
,![]() ,
,![]() …коэффициенты
…коэффициенты
ошибок, полученные выше (C0– коэффициент статической ошибки,C1
– коэффициент скоростной ошибки и
т. д.).
Коэффициенты
ошибки могут быть также получены делением
числителя передаточной функции на ее
знаменатель. Полученное выражение для
вынужденной ошибки позволяет оценить
точность системы автоматического
управления в установившемся режиме.
Вынужденная ошибка, например, хорошо
характеризует точность работы следящих
систем автоматического управления.
Соседние файлы в папке ТАУ
- #
- #
- #
Лекция 17. Расчет установившейся ошибки в системах управления.
Структурные признаки астатизма
Установившейся (статической) ошибкой называют
постоянное значение сигнала ошибки x(t)=g(t)-y(t),
которое она приобретает по окончании переходного процесса: ![]() , рисунок 116.
, рисунок 116.
Очевидно, установившаяся ошибка зависит от законов
изменения и численных характеристик входных сигналов системы. Поэтому при ее
определении принято рассматривать так называемые типовые входные сигналы,
законы изменения которых составляют степенной ряд относительно времени.
Например, для задающего воздействия:
![]() ,
, ![]() ,
,  и так
и так
далее.
При наличии нескольких воздействий на линейную систему
для определения xуст используется
принцип суперпозиции – реакция линейной системы на совокупность входных
сигналов совпадает с алгебраической суммой ее реакций на каждый из сигналов в
отдельности:
 , где
, где
каждое слагаемое, или составляющая сигнала ошибки, ![]() определяется
определяется
для i-го входного сигнала при условии, что остальные
тождественно равны нулю. Такой подход полностью соответствует определению
передаточной функции и позволяет выполнять расчет установившейся ошибки на
основе структурной схемы системы.
Рассмотрим порядок расчета установившейся ошибки на
следующем достаточно общем примере (рисунок 117).
В соответствии с принципом суперпозиции установившаяся
ошибка будет определяться здесь в виде суммы трех составляющих ![]() .
.
Изображение по Лапласу ошибки от задающего воздействия
получают через передаточную функцию замкнутой системы по ошибке ![]() при известном изображении задающего
при известном изображении задающего
воздействия G(s):
![]() , где
, где
F(s) – основная передаточная функция замкнутой системы.
Для структурной схемы на рисунке 117
 , где
, где ![]() – передаточная функция
– передаточная функция
разомкнутой системы, или прямой цепи системы, для рассматриваемого примера.
Непосредственно для расчета
установившегося значения ошибки от задающего воздействия используют теорему о
конечном значении для преобразования Лапласа:
![]()
В результате:
 .
.
Изображение по Лапласу ошибки от возмущающего
воздействия получают через передаточную функцию замкнутой системы по ошибке от
возмущения ![]() при известном изображении возмущающего
при известном изображении возмущающего
воздействия F(s):
![]() , где
, где
Ff(s) –передаточная функция замкнутой системы по
возмущающему воздействию,
 ;
;
Wf(s)
– передаточная функция разомкнутой системы по возмущению (передаточная функция
участка прямой цепи системы от точки приложения возмущающего воздействия до
выхода системы).
Для структурной схемы на рисунке 8 необходимо
учитывать два возмущающих воздействия, приложенные в различные точки системы.
Для f1:
![]() ,
,
 ,
,
 .
.
Для f2:
![]() ,
,
 ,
,
 .
.
Расчет упрощается для
системы с единичной отрицательной обратной связью (рисунок 118):
 ,
,
 , где k=k1k2k3 – коэффициент передачи
, где k=k1k2k3 – коэффициент передачи
разомкнутой системы.
Найдем установившуюся ошибку
для некоторых типовых вариантов задающего воздействия.
При ![]() получим:
получим:
![]()
 .
.
При ![]() получим:
получим:
 .
.
При получим:
 .
.
Если установившаяся ошибка
тождественно равна нулю при каком-либо типовом варианте входного сигнала,
независимо от его численных характеристик, систему называют астатической по
рассматриваемому входному сигналу.
Количество типовых вариантов
входного сигнала – членов степенного ряда, при которых установившаяся ошибка
тождественно равна нулю, определяет порядок астатизма.
Рассматриваемая система
обладает свойством астатизма второго порядка по задающему воздействию.
Рассмотрим установившуюся
ошибку от возмущения f1:
 ,
,
 , где
, где ![]() –
–
коэффициент передачи разомкнутой системы по возмущению f1.
При ![]() получим:
получим:

 .
.
При ![]() получим:
получим:
 .
.
При  получим
получим
тот же результат.
Отметим, что по возмущению f1 рассматриваемая система
не является астатической. Кроме того, она не в состоянии отработать два последних
варианта входного сигнала.
Рассмотрим установившуюся
ошибку от возмущения f2:
 ,
,
 , где
, где ![]() –
–
коэффициент передачи разомкнутой системы по возмущению f2.
При ![]() получим:
получим:

 .
.
При ![]() получим:
получим:
 .
.
При  получим:
получим:
 .
.
По возмущению f2 рассматриваемая система имеет
астатизм первого порядка. Она не в состоянии отработать возмущающее
воздействие, изменяющееся во времени с постоянным ускорением.
Подведем некоторые итоги:
1. Наличие и глубина
свойства астатизма зависят от точки приложения входного сигнала.
2. Постоянные времени
звеньев системы не влияют на ее точность.
3. Увеличение значения
коэффициента передачи разомкнутой системы приводит к снижению величины
установившейся ошибки.
Для систем с единичной
отрицательной обратной связью существуют достаточно простые структурные
признаки астатизма.
Рассмотрим структуру,
показанную на рисунке 119.
В общем случае передаточная
функция разомкнутой системы может быть представлена в следующей форме:
 , где l³0.
, где l³0.
Тогда получим:

и для общего вида задающего воздействия  , которому соответствует изображение
, которому соответствует изображение  ,
,
 .
.
Результат нахождения этого
предела зависит от соотношения показателей степени:
– при l>v установившаяся
ошибка равна нулю независимо от остальных параметров, то есть имеет место
астатизм;
– при l=v получаем
константу;
– при l<v установившаяся
ошибка стремится к бесконечности, то есть система не в состоянии отработать
входной сигнал.
Учитывая, что минимальное
значение v нулевое,
получаем условие астатизма по задающему воздействию: l>0.
Таким образом, структурный
признак астатизма по задающему воздействию в системе с единичной отрицательной
обратной связью состоит в наличии нулевых корней в знаменателе передаточной
функции разомкнутой системы, или интегрирующих звеньев в прямой цепи системы.
Нетрудно также убедиться,
что положительное значение l совпадает
с порядком астатизма.
Для получения признака
астатизма по возмущающему воздействию представим передаточные функции на
рисунке 10 в форме:
 ,
,
 , где l1+l2=l,
, где l1+l2=l,
k1k2=k, m1+m2=m,
n1+n2=n,
причем ![]() и
и ![]() .
.
Тогда получим:

и для общего вида возмущающего воздействия  , которому соответствует изображение
, которому соответствует изображение  ,
,
 .
.
Все вышеприведенные выводы
можно повторить для показателя степени l1.
Таким образом, структурный
признак астатизма по возмущающему воздействию в системе с единичной
отрицательной обратной связью состоит в наличии нулевых корней в знаменателе
передаточной функции участка системы до точки приложения воздействия, или
интегрирующих звеньев на том же участке.
