
Грузики в этом центробежном регуляторе имеют две степени свободы, так как их положение в пространстве задаётся двумя координатами: 1) углом поворота вала; 2) углом отклонения рычагов от вертикали (то есть от оси вала)
Сте́пени свобо́ды в механике — совокупность независимых координат перемещения и/или вращения, полностью определяющая положение системы или тела (а вместе с их производными по времени — соответствующими скоростями — полностью определяющая состояние механической системы или тела, то есть их положение и движение).
Это фундаментальное понятие применяется в теоретической механике, теории механизмов и машин, машиностроении, авиации и теории летательных аппаратов, робототехнике.
В отличие от обычных декартовых или какого-то другого типа координат, такие координаты в общем случае называются обобщёнными координатами (декартовы, полярные или какие-то другие конкретные координаты являются, таким образом, частным случаем обобщённых). По сути речь идет о минимальном наборе чисел, который полностью определяет текущее положение (конфигурацию) данной системы.
Требование минимальности этого набора или независимости координат означает, что подразумевается набор координат, необходимый для описания положения системы лишь при возможных движениях (например, если рассматривается математический маятник, подразумевается, что его длина не может меняться, и таким образом координата, которая характеризует расстояние от груза до точки подвеса, не является его степенью свободы, так как не может меняться — то есть количество степеней свободы математического маятника в пространстве 2, а такого же маятника, который может двигаться только в одной плоскости, 1. Им соответствуют углы отклонения маятника от вертикали).
В случае, когда рассматривается система со связями (точнее говоря, с удерживающими связями), количество степеней свободы механической системы меньше, чем количество декартовых координат всех материальных точек системы, а именно:

- где
 — количество степеней свободы,
— количество степеней свободы, - — количество материальных точек системы,
- — количество удерживающих связей, за исключением избыточных[Комм. 1].



Количество степеней свободы зависит не только от природы реальной системы, но и от модели (приближения), в рамках которых система изучается. Даже в приближении классической механики (в которых в целом и написана данная статья), если отказаться от использования дальнейших приближений, упрощающих задачу, количество степеней свободы любой макроскопической системы окажется огромным. Поскольку связи не бывают абсолютно жесткими (то есть на самом деле их можно рассматривать как связи лишь в рамках определённого приближения), то настоящее количество степеней свободы механической системы можно оценить как минимум как утроенное количество атомов (а в приближении сплошной среды — как бесконечное). Однако на практике используют приближения, позволяющие радикально упростить задачу и уменьшить количество степеней свободы при рассмотрении системы, поэтому в практических расчетах количество степеней свободы — конечное, обычно достаточно небольшое, число.
Так, приближение абсолютно твердого тела, являющееся примером жесткой связи, наложенной на каждую пару материальных точек тела, сводит количество степеней свободы твердого тела до 6. Рассматривая системы, состоящие из небольшого количества твердых тел, рассматриваемых в этом приближении, имеют, таким образом, небольшое количество степеней свободы, к тому же ещё, вероятно, уменьшаемое наложением дополнительных связей (соответствующих шарнирам и т. п.)[Комм. 2].
Число степеней свободы у механизмов может быть как неизменным, так переменным[1].
Примеры[править | править код]

Этот механизм Чебышёва имеет только одну степень свободы, так как его положение полностью определяется углом поворота одного (любого) из трёх подвижных звеньев — L2, L3 или L4.
- Твёрдое тело, движущееся в трёхмерном пространстве, максимально может иметь шесть степеней свободы: три поступательных и три вращательных.
- Автомобиль, если его рассматривать как твёрдое тело, перемещается по плоскости, а точнее говоря, по некоторой двумерной поверхности (в двумерном пространстве). Он имеет две степени свободы (одну вращательную и одну поступательную).
- Поезд вынужден перемещаться по рельсовому пути, и поэтому он имеет только одну степень свободы.
Степени свободы в пространстве большей размерности[править | править код]
В общем случае твёрдое тело в пространстве  измерений имеет
измерений имеет  степеней свободы ( поступательных и
степеней свободы ( поступательных и  вращательных).
вращательных).
Твердые тела. Деформируемые тела[править | править код]

Кинематика самолёта: помимо трёх поступательных, самолёт имеет и три вращательные степени свободы (показаны на рисунке)
Упругие или деформируемые тела можно рассматривать как систему множества мельчайших частиц (бесконечное число степеней свободы) в этом случае систему часто приближённо рассматривают как имеющую ограниченное число степеней свободы.
Если основным объектом анализа является движение, вызывающее большие перемещения, то для упрощения расчётов деформируемое тело приближённо рассматривают как абсолютно твёрдое, а иногда и как материальную точку. Например, если исследуется движение детали механизма, совершающей значительные перемещения, можно в главном приближении (и с хорошей точностью) рассматривать деталь как абсолютно твердое тело (при необходимости внеся затем, когда основное движение уже вычислено, поправки, связанные с её небольшими деформациями), особенно это верно, если исследуется, например, движение спутников по орбите, а если не рассматривать ориентацию спутника, то достаточно считать его материальной точкой — то есть ограничиться описанием спутника тремя степенями свободы.
Системы тел[править | править код]

Манипулятор с 6 степенями свободы в кинематической цепи
Система из нескольких тел может иметь в целом такое количество степеней свободы, которое является суммой степеней свободы составляющих систему тел, за вычетом тех степеней свободы, которые ограничиваются внутренними связями. Механизм, содержащий несколько соединённых тел, может иметь количество степеней свободы большее, чем имеет одно свободное твёрдое тело. В этом случае термин «степени свободы» используется для обозначения количества параметров, необходимых для точного определения положения механизма в пространстве.
У большинства механизмов фиксированное число степеней свободы, но возможны случаи переменного их числа. Первый механизм с переменным числом степеней свободы придумал немецкий механик В. Вундерлих в 1954 году (см. Wunderlich, 1954) — плоский механизм из 12 звеньев и 2 закреплённых шарниров. Более простой механизм с 9 звеньями придумал с описал (см. Ковалёв, 1994) российский математик Михаил Ковалёв[1].
Специфическим типом механизма является открытая кинематическая цепь, в которой жёсткие звенья имеют подвижные соединения, способные обеспечить одну степень свободы (если это петлевой шарнир или скользящее соединение), или две степени свободы (если это цилиндрическое соединение). Подобные цепи широко используются в современных промышленных механизмах и на производстве.
Рука человека имеет 7 степеней свободы.
Механическая система, имеющая 6 физических степеней свободы, называется голономной. Если система имеет меньшее количество степеней свободы, то её называют неголономной. Механическая система с количеством контролируемых степеней свободы бо́льшим, чем количество физических степеней свободы, называется избыточной.
Определение степеней свободы механизмов[править | править код]

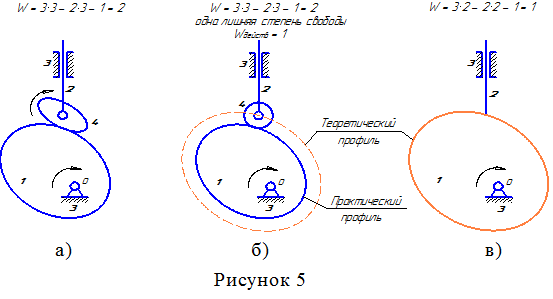
Определение количества степеней свободы плоских механизмов: m — количество степеней свободы; n — количество звеньев механизма (включая одно неподвижное звено); f — количество подвижных соединений звеньев
Большинство обычных механизмов имеют одну степень свободы, то есть имеется одно входное движение, определяющее одно выходное движение. Кроме того, большинство механизмов являются плоскими. Пространственные механизмы более сложны для расчётов.
Для расчётов степеней свободы механизмов применяется формула Чебышёва — Граблера — Кутцбаха[en].
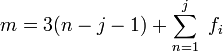
В наиболее простом виде для плоских механизмов эта формула имеет вид:

- где — количество степеней свободы;
- — количество звеньев механизма (включая одно неподвижное звено — основание);
- — количество кинематических пар с одной степенью свободы (петлевое или скользящее соединение).


В более общем виде формула Чебышёва — Граблера — Кутцбаха для плоских механизмов, содержащих более сложные соединения звеньев:

Простые механизмы способны создавать сложное движение
Или для пространственного механизма (механизма, имеющего трёхмерное движение):

- где — количество степеней свободы;
- — количество звеньев механизма (включая одно неподвижное звено — основание);
- — общее количество подвижных соединений звеньев, не рассматривая количество степеней свободы этих соединений;
- — сумма всех степеней свободы всех подвижных соединений (шарниров).


Гидропривод[править | править код]
Количество степеней свободы гидравлической системы может быть определено простым подсчётом количества независимо управляемых гидродвигателей.
Электротехника[править | править код]
В электротехнике понятие «степени свободы» часто используется для описания количества направлений, в которых фазированная антенная решётка может проектировать свои лучи. Оно на единицу меньше, чем количество элементов, содержащихся в решётке.
Принцип возможных перемещений[править | править код]
В теоретической механике известен принцип возможных перемещений, который так же, как и уравнения равновесия статики, позволяет находить внешние силовые воздействия, действующие на механическую систему. Количество уравнений, составленных, исходя из принципа возможных перемещений, равно количеству степеней свободы данной механической системы.
Степени свободы молекулы[править | править код]
Основная статья: Степени свободы (физика): Степени свободы молекулы
Формула внутренней энергии газа:
- ,

- где — количество степеней свободы молекулы газа;
- — масса газа;
- — молярная масса газа;
- — универсальная газовая постоянная;
- — абсолютная температура газа, включает количество степеней свободы молекулы.




Эта формула важна для расчётов, например, двигателей внутреннего сгорания.
Комментарии[править | править код]
- ↑ . Например, если зафиксированы расстояния от данной точки до трех точек абсолютно твердого тела, то фиксация расстояний от данной точки до других точек того же твердого тела будет избыточным, так как они будут сохраняться автоматически.
- ↑ . Однако следует иметь в виду, что, как и всякая модель, такая модель заставляет при её использовании платить определённую реальную цену: модель абсолютно твердого тела полностью игнорирует любые колебания и распространение волн в твердом теле, к которому она применяется. Впрочем, как обычно, она может быть применена в качестве нулевого приближения, а необходимые уточняющие поправки могут быть потом вычислены отдельно, и возможно, это можно будет делать с меньшей точностью, если они малы.
Примечания[править | править код]
- ↑ 1 2 Математические этюды.
Литература[править | править код]
- Тарг С. М. Краткий курс теоретической механики. Учеб. для втузов.— 10-е изд., перераб. и доп. — М.: Высш. шк., 1986.— 416 с, ил.
- Бухгольц Н. Н. Основной курс теоретической механики (часть первая). Изд-во «Наука», Главная редакция физико-математической литературы, М.: 1972, 468 стр.
- Wunderlich, W. Ein merkwürdiges Zwölfstabgetriebe : [нем.] // Österreichisches Ingenieurarchiv. — 1954. — Bd. 8, H. 2/3. — S. 224–228.
- Ковалёв М. Д. Геометрическая теория шарнирных устройств : [арх. 5 мая 2017] // Известия РАН. Серия математическая. — 1994. — Т. 58, № 1. — С. 45–70. — УДК 514+531.8(G).
Ссылки[править | править код]
- Степени свободы. Математические этюды. Дата обращения: 26 июля 2019.
В
механике,
степени свободы — это совокупность
независимых координат перемещения
и/или вращения, полностью определяющая
движение и/или положение тела или системы
тел. Это фундаментальное понятие
применяется в теоретической
механике, теории
механизмов и машин, машиностроении,
авиационной
промышленности, робототехнике
и других областях.
Примеры
Этот механизм
Чебышева имеет только одну
степень свободы, так как его положение
полностью определяется углом поворота
любого из трёх подвижных звеньев —
либо L2, либо L3, либо L4.
-
Твёрдое
тело, движущееся в трёхмерном
пространстве, максимально может иметь
шесть степеней свободы: три поступательных
и три вращательных. -
Автомобиль,
если его рассматривать как твёрдое
тело, перемещается по плоскости, а
точнее говоря, по некоторой двумерной
поверхности (в двумерном пространстве).
Он имеет три степени свободы (одну
вращательную, и две поступательные). -
Поезд
вынужден перемещаться по рельсовому
пути, и поэтому он имеет только одну
степень свободы.
Движение и размерности
В
общем случае твёрдое тело в d
измерениях имеет d(d + 1)/2 степеней
свободы (d поступательных и d(d −1)/2
вращательных).
Упругие
или деформируемые тела можно рассматривать
как систему множества мельчайших частиц
(бесконечное число степеней свободы; в
этом случае систему часто приближённо
рассматривают как имеющую ограниченное
число степеней свободы.
Если
основным объектом анализа является
движение, вызывающее большие перемещения
(например, движение спутников), то для
упрощения расчётов деформируемое тело
приближённо рассматривают как абсолютно
твёрдое.
Системы тел
Система
из нескольких тел может иметь в целом
такое количество степеней свободы,
которое является суммой степеней свободы
составляющих систему тел, за вычетом
тех степеней свободы, которые ограничиваются
внутренними связями. Механизм, содержащий
несколько соединённых тел, может иметь
количество степеней свободы большее,
чем имеет одно свободное твёрдое тело.
В этом случае термин «степени свободы»
используется для обозначения количества
параметров, необходимых для точного
определения положения механизма в
пространстве.
Специфическим
типом механизма является открытая
кинематическая
цепь, в которой жёсткие звенья
имеют подвижные соединения, способные
обеспечить одну степень свободы (если
это петлевой шарнир
или скользящее соединение), или две
степени свободы (если это цилиндрическое
соединение). Подобные цепи используются
в основном в робототехнике,
биомеханике
и для космических механизмов.
Рука
человека имеет 7 степеней свободы.
Робот,
имеющий механизм, способный контролировать
все 6 физических
степеней свободы, называют
голономным.
Если робот имеет меньшее количество
контролируемых степеней свободы, то
его называют неголономным. Робот
или другой объект с количеством
контролируемых степеней свободы
бо́льшим, чем количество физических
степеней свободы, называют избыточным.
Определение степеней свободы механизмов
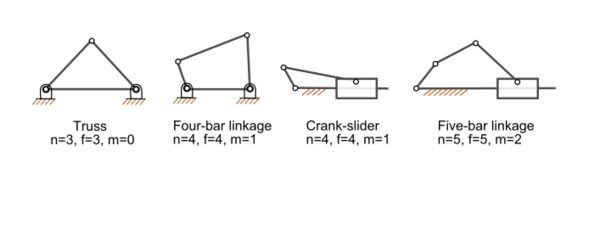
Определение количества
степеней свободы плоских механизмов:
m — количество степеней свободы; n —
количество звеньев механизма (включая
одно неподвижное звено); f — количество
подвижных соединений звеньев
Большинство
обычных механизмов имеют одну степень
свободы, то есть, имеется одно входное
движение, определяющее одно выходное
движение. Кроме того, большинство
механизмов являются плоскими.
Пространственные механизмы более сложны
для расчётов.
Для
расчётов степеней свободы механизмов
применяется формула
Чебышева — Граблера — Кутцбаха (англ.).
В
наиболее простом виде для плоских
механизмов эта формула имеет вид:
![]()
,
где
![]()
—
количество степеней свободы;
![]()
—
количество звеньев механизма (включая
одно неподвижное звено — основание);
![]()
—
количество кинематических
пар с одной степенью свободы
(петлевое
или скользящее
соединение);
В
более общем виде формула Чебышева —
Граблера — Кутцбаха для плоских
механизмов, содержащих более сложные
соединения звеньев:
,
где
Или
для пространственного механизма
(механизма, имеющего трёхмерное движение):
—
количество степеней свободы;
—
количество звеньев механизма (включая
одно неподвижное звено — основание);
![]()
—
общее количество подвижных соединений
звеньев, не рассматривая количество
степеней свободы этих соединений;

—
сумма всех степеней свободы всех
подвижных соединений (шарниров).
Число
степеней свободы – это число независимых
величин, которые необходимо задать для
того, чтобы однозначно определить
положение тела в пространстве. В разных
ситуациях число степеней свободы
твердого тела может быть различным.Твердое
тело имеет шесть степеней свободы, как
бы ни было велико число N образующих его
точек.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Под числом степеней свободы кинематической цепи подразумевается число степеней свободы подвижных звеньев относительно стойки (звена, принятого за неподвижное). Однако сама стойка в реальном пространстве может перемещаться.
Как отмечалось выше, число входных звеньев для превращения кинематической цепи в механизм должно равняться числу степеней свободы этой кинематической цепи.
Например, любое неподвижное тело на Земле имеет нулевую степень свободы, но в Мировом пространстве вместе с Землей оно перемещается, используя все шесть степеней свободы.
Другой пример: кинематическая цепь, положенная в основу поршневого двигателя, имеет одну степень свободы относительно стойки (звена, принятого при исследовании за неподвижное, которое состоит из цилиндра, присоединенного к картеру и раме или корпусу автомобиля, мотоцикла или другой машины), хотя при движении машины сама стойка также перемещается.
Однако, независимо от того движется машина или нет, характер движения звеньев поршневого двигателя относительно стойки остается неизменным.
Введем следующие обозначения:
k – число звеньев кинематической цепи;
p1 – число кинематических пар первого класса в данной цепи;
p2 – число пар второго класса;
p3 – число пар третьего класса;
p4 – число пар четвертого класса;
p5 – число пар пятого класса.
Общее число степеней свободы k свободных звеньев, размещенных в пространстве, равно 6k. В кинематической цепи они соединяются в кинематические пары (т.е. на их относительное движение накладываются связи).
Кроме того, в качестве механизма используется кинематическая цепь, имеющая стойку (звено, принятое за неподвижное). Поэтому число степеней свободы кинематической цепи будет равно общему числу степеней свободы всех звеньев за вычетом связей, накладываемых на их относительное движение:
W=6k–∑Si
Число связей, накладываемых всеми парами I класса, равно их числу, т.к. каждая пара первого класса накладывает одну связь на относительное движение звеньев, соединенных в такую пару; число связей, накладываемых всеми парами II класса, равно их удвоенному количеству (каждая пара второго класса накладывает две связи) и т.д.
У звена, принятого за неподвижное, отнимаются все шесть степеней свободы (на стойку накладывается шесть связей). Таким образом:
S1=p1, S2=2p2, S3=3p3, S4=4p4, S5=5p5, Sстойки=6,
а сумма всех связей
∑Si=p1+2p2+3p3+4p4+5p5+6.
В результате получается следующая формула для определения числа степеней свободы пространственной кинематической цепи:
W=6k–p1–2p2–3p3–4p4–5p5–6.
Сгруппировав первый и последний члены уравнения, получаем:
W=6(k–1)–p1–2p2–3p3–4p4–5p5,
или окончательно:
W=6n–p1–2p2–3p3–4p4–5p5,
где n – число подвижных звеньев кинематической цепи.
Данное уравнение носит название структурной формулы кинематической цепи общего вида.
Формула была получена впервые ( в несколько ином виде) П.И. Сомовым в 1887 г., и развита А.П. Малышевым в 1923 г. Поэтому ее часто называют формулой Сомова-Малышева. В некоторых учебниках ее называют формулой Малышева – по авторству окончательного варианта.
Примечание: авторы некоторых учебников придают иной смысл индексу при обозначении числа кинематических пар pi , а именно:
p1 – число одноподвижных пар (т.е. кинематических пар, обеспечивающих одну степень свободы в относительном движении),
p2 – число двухподвижных пар и т.д.
То есть индекс в данном случае показывает не число связей, а число степеней свободы и в формуле обозначения p1 и p5 , а также p2 и p4 меняются местами. Поэтому при использовании различных учебников необходимо внимательно следить за интерпретацией автора, т.к., к сожалению, часто разные авторы в одно и то же обозначение вкладывают разный смысл. В результате при одних и тех же обозначениях одни и те же формулы имеют различный вид.
В манипуляторах и промышленных роботах используются разомкнутые (открытые) кинематические цепи. В таких цепях число подвижных звеньев равно общему числу кинематических пар:
n=p1+2p2+3p3+4p4+5p5,
т.е.
W=6(p1+2p2+3p3+4p4+5p5)–p1–2p2–3p3–4p4–5p5,
или окончательно:
W=5p1+4p2+3p3+2p4+p5.
Таким образом, число степеней свободы разомкнутой кинематической цепи равно сумме подвижностей (степеней свободы) кинематических пар, входящих в эту цепь. Кроме степеней свободы на качество работы манипуляторов и промышленных роботов большое влияние оказывает их маневренность.
Маневренность – это число степеней свободы манипулятора при неподвижном захвате. Она определяет способность манипулятора (промышленного робота) обходить препятствия и вычисляется по следующей формуле:
M=W–6,
где M – маневренность манипулятора.
Как было отмечено выше, значительное число применяемых на практике механизмов являются плоскими механизмами (т.е. в их основе лежат плоские кинематические цепи). Помещение кинематической цепи в плоскость накладывает три общие связи на движение всех звеньев этой цепи, поэтому k свободных звеньев, помещенных в плоскость, имеют в общей сложности 3k степеней свободы.
На плоскости существуют только пары четвертого и пятого классов. На кинематическую пару четвертого класса приходится одна связь (в дополнение к трем общим связям, приходящимся на плоскость); на пару пятого класса приходится две связи; у стойки отнимаются все три степени свободы. Таким образом:
∑Si=p4+2p5+3,
W=3k–p4–2p5–3,
или
W=3(k–1)–p4–2p5,
окончательно
W=3n–2p5–p4.
Это есть структурная формула для плоской кинематической цепи.
Эта формула впервые была предложена П.Л. Чебышевым в 1869 г. и ее часто называют формулой Чебышева.
Формула Чебышева (как в прочем и формула Сомова-Малышева) дает абсолютно правильный результат для общего случая кинематической цепи, состоящей из соответствующего числа звеньев и кинематических пар.
Однако конструктор из множества размеров и форм звеньев может подобрать такие, которые обеспечат подвижность цепи при нулевой степени свободы, или обеспечить работоспособность механизма с помощью одного двигателя при числе степеней свободы больше единицы. То есть, как и в большинстве случаев жизни, здесь имеются исключения из правил.
Если кинематическая цепь, имеющая в соответствии с формулой Чебышева нулевую степень свободы, оказывается подвижной, это означает, что в данной цепи имеются пассивные (избыточные) связи. При исследовании механизма в этом случае звенья, создающие пассивные связи, просто удаляются из рассмотрения.
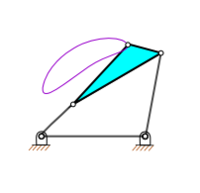
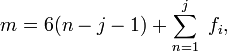
На рисунке 4а показана кинематическая схема механизма эллипсографа (W=3 ∙ 3 – 2 ∙ 4 = 1). Он обладает следующими свойствами: точки A и B движутся поступательно вдоль осей X и Y как принадлежащие ползунам 1 и 3.
При этом точка M описывает эллипс с малой полуосью, равной отрезку AM и расположенной вдоль оси Y, и с большой полуосью BM, расположенной вдоль оси X (т.е. эллипс, вытянутый вдоль оси X); точка N описывает эллипс с малой полуосью BN и с большой полуосью AN, вытянутый вдоль оси Y.
Точка C (середина отрезка AB) описывает «эллипс» с равными полуосями, т.е. окружность. Если некоторое звено 5 присоединить шарнирами к неподвижной точке O (начало координат) и к какой-либо точке на звене AB (например, к точке N – рисунок 4б), то получится неподвижная система (ферма):
W = 3 ∙ 4 – 2 ∙ 6 = 0.
Однако, если звено 5 присоединить вторым шарниром к звену AB в точке C (рисунок 4в), то движение точки C, принадлежащей звену 5, и движение точки C, принадлежащей звену AB, становятся согласованными – обе точки движутся по одной и той же траектории (по окружности радиуса OC).
В этом единственном частном случае кинематическая цепь становится подвижной (формула не может «предусмотреть» такой частный случай – она дает результат для общего случая соответствующего сочетания звеньев и кинематических пар). В данном случае звено 5 накладывает пассивную (избыточную) связь и при исследовании механизма это звено можно не учитывать.
Наличие пассивных связей можно установить построением нового положения заданной кинематической цепи с нулевой (или отрицательной) степенью свободы по тем же размерам звеньев. Если цепь строится в других положениях, она имеет пассивные связи. Если же размеры не стыкуются в новом положении, то это действительно неподвижная система – ферма (при отрицательном числе степеней свободы – ферма статически неопределимая).
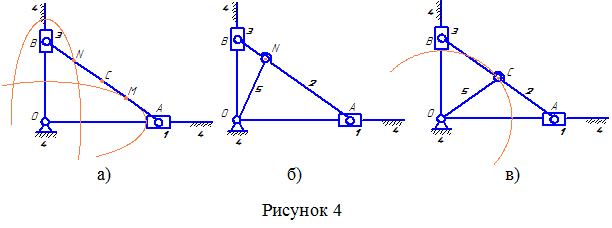
Лишние степени свободы – если в механизме имеется движение какого-либо звена, не влияющее на движение остальных звеньев этого механизма, то оно дает лишнюю степень свободы.
Обычно лишняя степень свободы образуется при наличии круглого ролика. Вращаясь вокруг собственной оси, он не изменяет характера движения остальных звеньев.
На рисунке 5а изображен механизм с некруглым роликом – здесь положение толкателя 2 будет зависеть не только от положения кулачка, но и от положения ролика. То есть механизм действительно имеет две степени свободы. В механизме на рисунке 5б ролик круглый и его угол поворота не влияет на положение толкателя – положение толкателя полностью определяется положением кулачка.
Таким образом, фактически механизм имеет одну действующую степень свободы (вращение ролика вокруг собственной оси дает формально вторую степень свободы, но это движение не оказывает влияния на движение остальных звеньев механизма).
При исследовании механизма удобно избавиться от лишней степени свободы. Для этого надо практический профиль заменить теоретическим – эквидистантным профилем, проходящим через центр ролика, и удалить ролик из рассмотрения (рисунок 5в).
Замена высших кинематических пар цепями с низшими парами >
Курсовой проект по ТММ >
Механизм — это искусственно созданная система тел, предназначенная для преобразования движения одного или нескольких тел в требуемые движения других тел.
Звено механизма — каждое из тел, входящих в состав механизма, состоящее часто из комплекса неподвижно сочлененных между собой деталей.
Звенья механизма бывают:
- жесткие;
- упругие (пружины, рессоры, металлорезиновые соединения и др. Воздух или газ, заключенный в пространстве с переменным объемом, также рассматривается как упругое звено);
- гибкие (канаты, ремни, цепи. Свойствами гибких звеньев (переносить движение от одного жесткого звена к другому) обладают также жидкость и система твердых тел в гидростатической и в шариковой передачах).
Среди звеньев механизма всегда выделяют входные и выходные звенья (при этом остальные звенья называются соединительными).
Входные звенья — звенья механизма, которым сообщается движение, преобразуемое в требуемое движение других звеньев механизма.
Выходные звенья — звенья механизма, совершающие требуемое движение, для которого предназначен механизм.
Ведущее звено — звено, для которого сумма элементарных работ всех внешних сил, приложенных к нему, является положительной.
Ведомое звено — звено, для которого сумма элементарных работ всех внешних сил, приложенных к нему, является отрицательной.
Положение и перемещение ведомого звена однозначно зависит от положения и перемещения ведущего звена (звеньев).
В большинстве случаев входное звено является и ведущим.
Кинематическая пара — это соединение двух соприкасающихся звеньев, допускающее их относительное движение.
Элемент кинематической пары — точка, линия или поверхность одного звена, входящая в соприкосновение с другим звеном.
Кинематические пары механизмов классифицируют:
1) По количеству условий связи в относительном движении звеньев (по Малышеву А.П.).
Пространственные кинематические пары можно разделить на 5 классов:
- 1 класс — уничтожается одно возможное относительное движение звеньев;
- 2 класс — уничтожается два возможных относительных движения звеньев;
- 3 класс — уничтожается три возможных относительных движения звеньев;
- 4 класс — уничтожается четыре возможных относительных движения звеньев;
- 5 класс — уничтожается пять возможных относительных движений звеньев.
2) По числу оставшихся степеней свободы (по Добровольскому В.В.):
- пара I рода — осталась неуничтоженной одна степень свободы в относительном движении;
- пара II рода — остались неуничтоженными две степени свободы в относительном движении;
- пара III рода — остались неуничтоженными три степени свободы в относительном движении;
- пара IV рода — остались неуничтоженными четыре степени свободы в относительном движении;
- пара V рода — остались неуничтоженными пять степеней свободы в относительном движении.
При определении рода кинематической пары необходимо установить число независимых относительных движений, и тогда найденное число и будет номером рода кинематической пары.
В плоском механизме возможно существование только кинематических пар I и II рода (т.е. 5 и 4 класса).
3) По характеру соприкосновения элементов кинематические пары (КП) подразделяются на:
— низшие (элементы кинематических пар представляют собой взаимно облегающие поверхности или отдельные их части).
Особенность: обратимость движения (т.е. характер относительной траектории, независимо от того, на каком из звеньев выбирается точка, один и тот же, а если две точки разных звеньев взяты на одинаковом расстоянии от центра, то их траектории совпадают).
Преимущество: способность элементов кинематической пары воспринимать и передавать значительные силы при меньшем износе.
— высшие (элементы кинематических пар касаются в точке или по линии).
Относительным движением звеньев, соединенных высшей КП, может быть:
- чистое качение;
- качение со скольжением;
- чистое скольжение.
Особенность: высшие КП не обладают обратимостью движения (если катить окружность по прямой, то любая из точек окружности опишет при этом циклоиду, а если катить по окружности прямую, то каждая из точек прямой перемещается по эвольвенте круга).
Преимущество: возможность воспроизводить достаточно сложные относительные движения.
4) Различают также кинематические пары с односторонней или с двусторонней связью.
Для того, чтобы элементы КП находились в постоянном соприкосновении, КП должны быть замкнуты. Замыкание кинематической пары может быть:
- геометрическое (осуществляется соответствующими геометрическими формами элементов звеньев КП);
- силовое (осуществляется силой веса, силой упругости пружин и т.п.).
Кинематическая цепь — это совокупность некоторого количества звеньев, соединенных при помощи кинематических пар последовательно или разветвлено.
Кинематическая цепь (КЦ) может быть:
1) Простой или сложной. В простой КЦ каждое из звеньев образует подвижное соединение с двумя звеньями. В сложную КЦ включены сложные звенья, соединяющиеся более чем с двумя другими звеньями.
2) Открытой или замкнутой. В открытой (т.е. незамкнутой) КЦ есть звенья, входящие только в одну кинематическую пару.
3) Плоской или пространственной. В плоской кинематической цепи точки всех звеньев могут перемещаться в параллельных плоскостях.
В пространственной кинематической цепи точки описывают либо пространственные кривые, расположенные в различных плоскостях, либо плоские кривые, расположенные в различных непараллельных плоскостях.
Относительная подвижность соединяемых звеньев может быть обеспечена введением не кинематической пары, а кинематического соединения, в котором между подвижно сочленяемыми звеньями вводятся промежуточные тела. Примеры кинематического соединения: шариковые и роликовые подшипники, шарико-винтовая передача, роликовые направляющие. Относительная подвижность звеньев, связываемых кинематическим соединением, в зависимости от его вида, совпадает с подвижностью какой-либо из простых кинематических пар. Кинематические соединения относят к соответствующему классу на тех же основаниях, что и кинематические пары.
Число степеней свободы кинематической цепи относительно звена, принятого за неподвижное, определяется по формуле Сомова–Малышева. Её можно записать в одном из двух видов: «через род кинематической пары» или «через класс кинематической пары»:
W = 6n – 5PI – 4PII – 3PIII – 2PIV– PV
или, что то же,
W = 6n – 5p5 – 4p4 – 3p3 – 2p2 – p1
где:
n – число подвижных звеньев кинематической цепи;
Pi – количество кинематических пар i-го рода (т.е. PI – количество одноподвижных пар, PII – количество двухподвижных пар, PIII – количество трехподвижных пар, PIV – количество четырехподвижных пар, PV – количество пятиподвижных пар);
pi — количество кинематических пар i-го класса (т.е. р5 – количество КП 5 класса, где 5 степеней свободы уничтожены, а одна остается (пара — одноподвижная); р4 – количество КП 4 класса, где четыре степени свободы уничтожены, а две остаются (пара — двухподвижная) и т.д.).
Для плоского механизма эта формула принимает вид
W = 3n – 2PI – PII
где:
РI — количество одноподвижных пар,
РII — количество двухподвижных пар;
или, что то же,
W = 3n – 2p5 – p4
p5 — количество кинематических пар 5 класса (т.е. одноподвижных),
р4 — количество кинематических пар 4 класса (т.е. двухподвижных).
Кинематическая цепь i-го семейства (i = 0; 1; 2; 3; 4) — кинематическая цепь, на движение всех звеньев которой накладывается i ограничений.
Основные виды механизмов с низшими парами:
- двухзвенный (с вращательной кинематической парой или с поступательной);
- трехзвенный (клиновой механизм, винтовой механизм);
- четырехзвенный (четырехзвенный шарнирный механизм, четырехзвенный рычажный механизм).
Четырехзвенный шарнирный механизм (шарнирный четырехзвенник) служит для преобразования одного вида вращательного движения в другое. Подвижные звенья этого механизма имеют следующие названия: кривошип, коромысло, ползун и шатун.
Кривошип — звено, которое может совершать полный оборот вокруг неподвижной оси. Если длина кривошипа мала, то его часто выполняют в виде эксцентрика – диска, насаженного на вал с эксцентриситетом, равным длине кривошипа.
Коромысло — звено, которое совершает неполный оборот вокруг неподвижной оси.
Ползун — звено, образующее поступательную пару со стойкой.
Шатун — звено, которое не образует кинематических пар со стойкой; совершает сложное движение.
Примером четырехзвенного рычажного механизма может служить кулисный механизм (двухкривошипный кулисный механизм или кривошипно-коромысловый). Разновидности кулисных механизмов следующие:
- двухползунный рычажный механизм (механизм Кардана);
- кулисный кривошипно-ползунный механизм (или иначе – кулисный синусный механизм);
- кулисный коромыслово-ползунный механизм (или иначе – кулисный тангенсный механизм);
- двухкулисный двухкривошипный механизм.
Среди звеньев кулисного механизма выделяют «кулису» и «кулисный камень».
Кулиса — подвижное звено рычажного механизма, образующее поступательную пару с другим подвижным звеном — камнем.
Кулисный камень выполняют:
- в виде ползушки, которая перемещается внутри прямолинейного паза кулисы;
- в виде втулки, скользящей по прямолинейному стержню кулисы.
Основные виды механизмов с высшими парами:
- кулачковые механизмы;
- зубчатые механизмы;
- фрикционные механизмы.
Обобщенные координаты механизма — это независимые между собой координаты (линейные или угловые), определяющие положение всех звеньев механизма относительно стойки.
За обобщенные координаты механизма можно взять любые координаты звеньев.
Начальное звено — звено, которому приписывается одна или неколько обобщенных координат механизма.
Определение положений всех звеньев механизма начинается с определения положений начальных звеньев.
Начальное звено не обязательно совпадает с входным звеном (если при этом упрощается анализ механизма).
Если все связи в кинематических парах геометрические (т.е. налагают ограничения только на положения точек звеньев), число степеней свободы механизма (число возможных перемещений) равно числу обобщенных координат механизма.
Избыточные связи — повторяющиеся связи, которые можно удалить, сохранив при этом заданное число степеней свободы.
Избыточные связи могут возникать:
- в кинематических парах (например, коленчатый вал четырехцилиндрового двигателя образует с подшипником одноподвижную вращательную пару, что вполне достаточно с точки зрения кинематики данного механизма с одной степенью свободы. Однако, учитывая большую длину вала и значительные силы, нагружающие коленчатый вал, приходится добавлять ещё два подшипника, иначе система будет неработоспособной из-за недостаточной прочности и жесткости);
- в кинематических цепях (для обеспечения нужной прочности и жесткости системы, особенно при передаче больших сил). Избыточные связи в кинематических цепях следует устранять или оставлять минимальное количество.
Избыточные связи бывают:
- локальные (появляются, если помимо необходимых элементов кинематическая пары, обусловленных требуемыми геометрическими связями, при конструировании используются дополнительные элементы. При наличии избыточных локальных связей относительное движение звеньев либо становится невозможным (зацикливание, защемление элементов), либо осуществляется за счет деформации звеньев между реальными поверхностями элементов или их износа). Увеличение числа избыточных локальных связей в кинематических парах способствует уменьшению податливости конструкции, а потому может оказаться вредным:
- в случае изменения температурного режима работы;
- при деформации стойки;
- при отклонениях размеров, формы и расположения поверхностей элементов кинематической пары.
- контурные (если есть контурные избыточные связи, то сборка механизма и движение его звеньев становится возможным только при деформировании звеньев).
Источники:
- Фролов К.В., Попов С.А., Мусатов А.К. Теория механизмов и машин. Под ред. Фролова К.В. — М.: Высш. шк., 1987. — 496 с.
- Кожевников С.Н. Теория механизмов и машин. — М.: Машиностроение, 1969. — 584 с.
- Левитский Н.И. Теория механизмов и машин. — 2-е изд., перераб. и доп. — М.: Наука, 1990. — 592 с.
- Артоболевский И.И. Теория механизмов и машин. — 4-е изд., перераб. и доп. — М.: Наука, 1988. — 640 с.

Богдан Новах
Эксперт по предмету «Архитектура и строительство»
Задать вопрос автору статьи
Степень свободы с точки зрения механики
Степень свободы – это комбинация независимых координат перемещения и (или) вращения, полностью определяющая положение системы или тела.
Совместно с производными по времени от совокупности независимых координат (соответствующими скоростями) степени свободы полностью определяют состояние механической системы (т.е. ее положение в пространстве). Данный термин используется в таких дисциплинах, как:
- теоретическая механика;
- машиностроение;
- робототехника;
- теория летательных аппаратов.
В отличие от декартовой системы координат, степени свободы являются обобщенными координатами. Полярные, декартовы или еще какие-то конкретные координаты являются частным случаем обобщенных. Это значит, что речь идет о минимальном наборе чисел, полностью определяющем конфигурацию какой-либо системы.
![]()
Сдай на права пока
учишься в ВУЗе
Вся теория в удобном приложении. Выбери инструктора и начни заниматься!
Получить скидку 3 000 ₽

Рисунок 1. Степени свободы. Автор24 — интернет-биржа студенческих работ
Требования минимальности такого набора параметров означает, что имеется в виду набор координат, который может описать систему лишь при возможном ее движении. Например, если в качестве системы рассматривать математический маятник при предположении, что его длина не может меняться, то координата, характеризующая расстояние от груза до точки его прикрепления не является степенью свободы, поскольку такая координата не может меняться.
Степень свободы и геометрическая неизменяемость
Если говорить о строительной механике, то при прочностном расчете систем, моделирующих реальные сооружения используются упрощенные изображения, свободные от второстепенных факторов, не играющих важное значение в работе. Такая модель называется расчетной схемой сооружения. Чаще всего в строительной механике ограничиваются рассмотрением сооружений в виде плоских систем, составленных из отдельных элементов, связанных между собой.
«Степень свободы с примерами» 👇
Вышеописанные системы могут воспринимать нагрузку лишь в том случае, когда они сохраняют заданную структуру (геометрическую форму и положение). Геометрически изменяемые системы не могут в полной мере уравновесить внешние усилия и под их действием приходят в движение, что оказывает непосредственное влияние на форму конструкции. Разумеется, подобные системы не следует использовать в качестве расчетных схем для реальных сооружений. Иными словами, модель проектируемого сооружения должна быть структурно или геометрически неизменяема (изменение формы элемента возможно здесь лишь при деформации данного элемента), а также неподвижна относительно основания.
Для того, чтобы выявить, обладает ли система такими характеристиками, а также для выявления характера работы каждого из элементов этой системы производят кинематический анализ. Такой анализ должен выполняться перед основным расчетом.
Изменяемость внутренней структуры расчетной схемы, а также ее подвижность относительно основания характеризуется степенью свободы, количеством независимых геометрических параметров, определяющих положение того или иного элемента. В этой связи кинематический анализ системы начинается с определения ее степени свободы.
Каждый геометрически неизменяемый элемент системы называется диском и имеет три степени свободы в плоскости. Так принято считать потому, что данный элемент может перемещаться поступательно по двум направлениям, а также поворачиваться вокруг любой точки. Простейшим диском с точки зрения строительной механики является стержень, моделирующий некоторые конструкции (например, стойку или ригель). Для реализации неизменяемости структуры и неподвижности всей модели (расчетной схемы) диски соединяют приспособлениями, способными ограничить степени свободы. Всякое приспособление, отнимающее одну степень свободы элемента, называется кинематической связью.
Роль связей в строительной механике выполняют шарниры и различные опоры. Шарниры могут быть простыми (рис. 1.1 а) и сложными (рис. 1.1 б).
С точки зрения строительной механики шарнир – это связь, которая позволяет соединяемым им элементам поворачиваться друг относительно друга.
Простой шарнир соединяет два диска, сложный – два и более. В этой связи сложный шарнир можно назвать эквивалентом (n-1) простых шарниров, где n – количество соединяемых дисков.
Каждый простой шарнир является эквивалентом двух связей, поскольку препятствует двум любым взаимным смещениям дисков, оставляя при этом возможность их взаимного поворота.
Степень свободы системы W, состоящей из Д дисков, соединяемых Ш простыми шарнирами будет определяться по формуле:
W = 3 • Д – 2 • Ш – С0, где С0 – число опорных стержней.
Для определения количества дисков расчетной схемы необходимо отбросить все шарниры и опоры, а для определения числа шарниров Ш – все опоры.
Для ферм, т.е. шарнирно-стержневых систем, состоящих из стержней, соединенных по концам шарнирами, степень свободы определяется по более простой формуле:
W = 2 • У – С – С0, где У – количество узлов фермы, С – число внутренних стержней.
Данная формула получена исходя из условия, что каждый узел шарнирно-стержневой системы имеет две степени свободы на плоскости, а стержень, соединяющий два узла, является эквивалентом одной связи, поскольку налагает на координаты точки лишь одно условие – равенство состояния.
Степень свободы системы без опорных стержней складывается из двух частей: степени изменяемости внутренней структуры и степени ее подвижности относительно основания (она равна трем).
Находи статьи и создавай свой список литературы по ГОСТу
Поиск по теме
