| Момент силы | |
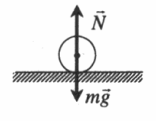
|---|---|
![vec{M}=left[vec{r}timesvec{F}right]](https://wikimedia.org/api/rest_v1/media/math/render/svg/eb353a429aeedc00390e7ccd563692a29a4607c0) |
|
| Размерность | L2MT−2 |
| Единицы измерения | |
| СИ | Н·м |
| СГС | Дина-сантиметр |
| Примечания | |
| Псевдовектор |
Моме́нт си́лы (момент силы относительно точки) — векторная физическая величина, характеризующая действие силы на механический объект, которое может вызвать его вращательное движение. Определяется как векторное произведение радиус-вектора точки приложения силы  и вектора силы
и вектора силы  . Моменты сил, образующиеся в разных условиях, в технике могут иметь названия: кру́тящий момент, враща́тельный момент, вертя́щий момент, враща́ющий момент, скру́чивающий момент.
. Моменты сил, образующиеся в разных условиях, в технике могут иметь названия: кру́тящий момент, враща́тельный момент, вертя́щий момент, враща́ющий момент, скру́чивающий момент.
Момент силы обозначается символом  или, реже,
или, реже,  (тау).
(тау).
Единица измерения в СИ: Н⋅м. Величина момента силы зависит от выбора начала отсчёта радиус-векторов O.
Понятие момента силы используется, в основном, в области задач статики и задач, связанных с вращением деталей (рычагов и др.) в технической механике. Особенно важен случай вращения твёрдого тела вокруг фиксированной оси — тогда O выбирают на этой оси, а вместо самого момента рассматривают его проекцию на ось  ; такая проекция называется моментом силы относительно оси.
; такая проекция называется моментом силы относительно оси.
Наличие момента силы влечёт изменение момента импульса тела  относительно того же начала O со временем
относительно того же начала O со временем  : имеет место соотношение
: имеет место соотношение  . В статике равенство нулю суммы моментов всех приложенных к телу сил является одним из условий (наряду с равенством нулю суммы сил) реализации состояния покоя.
. В статике равенство нулю суммы моментов всех приложенных к телу сил является одним из условий (наряду с равенством нулю суммы сил) реализации состояния покоя.
Определение, общие сведения[править | править код]
В физике момент силы играет роль вращающего воздействия на тело.
Видеоурок: вращающий момент
В простейшем случае, если сила приложена к рычагу перпендикулярно ему и оси вращения, то момент силы определяется как произведение величины  на расстояние
на расстояние  от места приложения силы до оси вращения рычага, называемое «плечом силы»:
от места приложения силы до оси вращения рычага, называемое «плечом силы»:
 .
.

Например, сила в 3 ньютона, приложенная на расстоянии 2 м от оси, создаёт такой же момент, что и сила в 1 ньютон с плечом 6 м.
Если действуют две силы, говорят о моменте пары сил (такая формулировка восходит к трудам Архимеда). При этом равновесие достигается в ситуации  .
.
Для случаев более сложных движений и более сложных объектов определение момента как произведения  требует универсализации.
требует универсализации.
Момент силы иногда называют вращающим или крутящим моментом. «Вращающий» момент понимается в технике как внешнее усилие, прикладываемое к объекту, а «крутящий» — как внутреннее, возникающее в самом объекте под действием приложенных нагрузок (этим понятием оперируют в сопромате).
Момент силы относительно точки[править | править код]

Момент силы, приложенный к гаечному ключу. Направлен от зрителя
В общем случае момент силы , приложенной к телу, определяется как векторное произведение
- ,
где — радиус-вектор точки приложения силы. Вектор перпендикулярен векторам и .
Начало отсчета радиус-векторов O может быть любым. Обычно O выбирают в чем-либо выделенной точке: в месте закрепления подвеса, в центре масс, на оси вращения и т.д.. Если одновременно анализируется момент импульса тела , то начало O всегда выбирается одинаковым для и .
Если не оговорено иное, то «момент силы» — это момент силы относительно точки (O), а не некоей оси.
В случае нескольких приложенных сосредоточенных сил их моменты векторно суммируются:
- ,
![{displaystyle {vec {M}}=sum _{i}left[{vec {r}}_{i}times {vec {F}}_{i}right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9b7fe1a3cdb4607b6f4ba588d40385667fac01df)
где  — радиус-вектор точки приложения
— радиус-вектор точки приложения  -й силы
-й силы  . В случае силы, распределённой с плотностью
. В случае силы, распределённой с плотностью  ,
,
- .
![{displaystyle {vec {M}}=int limits _{V}left[{vec {r}}times {frac {d{vec {F}}}{dV}}right]dV}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2bd127004c78eb2ab9f734f69002b3e6f5dbba22)
Если (Н/м3) — обобщённая функция, которая может содержать и дельтаобразные члены, то последней формулой охватываются и две предыдущие.
Момент силы относительно оси[править | править код]
Моментом силы относительно оси называется алгебраическое значение проекции момента на ось, то есть
- ,

где  — единичный вектор вдоль оси, а начало отсчёта O выбрано на оси. Момент силы относительно оси может быть рассчитан как
— единичный вектор вдоль оси, а начало отсчёта O выбрано на оси. Момент силы относительно оси может быть рассчитан как
- ,

где через  и
и  обозначены составляющие радиус-вектора и силы в плоскости, перпендикулярной оси.
обозначены составляющие радиус-вектора и силы в плоскости, перпендикулярной оси.
В отличие от момента силы , величина момента силы относительно оси не претерпевает изменения при сдвиге точки O вдоль оси.
Для краткости символ параллельности и знак могут опускаться, а (как и ) именоваться «моментом силы».
Единицы измерения[править | править код]
Момент силы имеет размерность «сила, умноженная на расстояние» и единицу измерения ньютон-метр в системе СИ. 1 Н·м — это момент, который производит сила 1 Н на рычаг длиной 1 м, приложенная к концу рычага и направленная перпендикулярно ему.
Формально, размерность (Н·м) совпадает с размерностями энергии и механической работы.
Некоторые примеры[править | править код]
Формула момента рычага[править | править код]

Момент, действующий на рычаг
Момент силы, действующей на рычаг, равен

или, если записать момент силы относительно оси,
- ,

где  — угол между направлением силы и рычагом. Плечо силы равно
— угол между направлением силы и рычагом. Плечо силы равно  . Максимальное значение момента достигается при перпендикулярности рычага и силы, то есть при
. Максимальное значение момента достигается при перпендикулярности рычага и силы, то есть при  . При сонаправленности и рычага момент равен нулю.
. При сонаправленности и рычага момент равен нулю.
Статическое равновесие[править | править код]
Для того чтобы объект находился в равновесии, должна равняться нулю не только сумма всех сил, но и сумма моментов всех сил вокруг любой точки.
Для двумерного случая с горизонтальными и вертикальными силами требование сводится к тому, чтобы нулевыми были сумма сил в двух измерениях:  и момент силы в третьем измерении:
и момент силы в третьем измерении:  .
.
Движение твёрдого тела[править | править код]
Движение твёрдого тела можно представить как движение конкретной точки и вращения вокруг неё.
Момент импульса относительно точки O твёрдого тела может быть описан через произведение момента инерции и угловой скорости относительно центра масс и линейного движения центра масс.
![{displaystyle {vec {L_{o}}}=I_{c},{vec {omega }}+[M({vec {r_{o}}}-{vec {r_{c}}}),{vec {v_{c}}}].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ecacc6649ed8fc84a6acadbafed8c4a1b6aea97d)
Будем рассматривать вращающиеся движения в системе координат Кёнига, так как описывать движение твёрдого тела в мировой системе координат гораздо сложнее.
Продифференцируем это выражение по времени. И если  — постоянная величина во времени, то
— постоянная величина во времени, то

где  — угловое ускорение, измеряемое в радианах в секунду за секунду (рад/с2). Пример: вращается однородный диск.
— угловое ускорение, измеряемое в радианах в секунду за секунду (рад/с2). Пример: вращается однородный диск.
Если тензор инерции меняется со временем, то движение относительно центра масс описывается с помощью динамического уравнения Эйлера:
![{displaystyle {vec {M_{c}}}=I_{c}{frac {d{vec {omega }}}{dt}}+[{vec {w}},I_{c}{vec {w}}].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f99dacfe48211745407ecd9854ebc44b9465e417)
Связь с другими величинами[править | править код]
С моментом импульса[править | править код]

Момент силы — производная момента импульса  относительно точки O по времени:
относительно точки O по времени:
- ,

Аналогичную формулу можно записать для моментов относительно оси:
- .

Если момент силы или равен нулю, момент импульса относительно соответствующей точки или оси сохраняется.
С мощностью[править | править код]
Если сила совершает действие на каком-либо расстоянии, то она совершает механическую работу и развивает мощность  (где
(где  — скорость материальной точки). Так же и в случае момента силы: если он совершает действие через «угловое расстояние», развивается мощность
— скорость материальной точки). Так же и в случае момента силы: если он совершает действие через «угловое расстояние», развивается мощность
- .

В системе СИ мощность  измеряется в ваттах, угловая скорость
измеряется в ваттах, угловая скорость  — в радианах в секунду.
— в радианах в секунду.
С механической работой[править | править код]
Если под действием момента силы происходит поворот тела на угол  , то совершается механическая работа
, то совершается механическая работа
- .

Для поворота, скажем, рычага вокруг фиксированной оси на угол  получим
получим
- .

В системе СИ работа  измеряется в джоулях, угол — в радианах.
измеряется в джоулях, угол — в радианах.
Размерность работы (и энергии) совпадает с размерностью момента силы («ньютон-метр» и джоуль — это одни и те же единицы). Момент силы 1 Н·м, при повороте рычага или вала на 1 радиан совершает работу в 1 Дж, а при повороте на один оборот совершает механическую работу и сообщает энергию  джоуля.
джоуля.
Измерение момента силы[править | править код]
Измерение момента силы осуществляется с помощью специальных приборов — торсиометров. Принцип их действия обычно основан на измерении угла закручивания упругого вала, передающего крутящий момент, либо на измерении деформации некоторого упругого рычага. Измерения деформации и угла закручивания производится различными датчиками деформации — тензометрическими, магнитоупругими, а также измерителями малых перемещений — оптическими, ёмкостными, индуктивными, ультразвуковыми, механическими.
Существуют специальные динамометрические ключи для измерения крутящего момента затягивания резьбовых соединений и регулируемые и нерегулируемые ограничители крутящего момента, так называемые «трещотки», применяемые в гаечных ключах, шуруповёртах, винтовых микрометрах и др.
Из истории понятия[править | править код]
Для того чтобы понять, откуда появилось понятие момента сил и как к нему пришли, стоит рассмотреть действие силы на рычаг, поворачивающийся относительно неподвижной оси. Работа, совершаемая при действии силы на рычаг , совершающий вращательное движение вокруг неподвижной оси, может быть рассчитана исходя из следующих соображений.
Пусть под действием силы конец рычага смещается на бесконечно малый отрезок  , которому соответствует бесконечно малый угол . Обозначим через
, которому соответствует бесконечно малый угол . Обозначим через  вектор, который направлен вдоль бесконечно малого отрезка и равен ему по модулю. Угол между векторами и равен
вектор, который направлен вдоль бесконечно малого отрезка и равен ему по модулю. Угол между векторами и равен  , а угол между векторами и равен .
, а угол между векторами и равен .
Следовательно, бесконечно малая работа  , совершаемая силой на бесконечно малом участке , равна скалярному произведению вектора и вектора силы, то есть
, совершаемая силой на бесконечно малом участке , равна скалярному произведению вектора и вектора силы, то есть  .
.
Теперь попытаемся выразить модуль вектора через радиус-вектор , а проекцию вектора силы на вектор — через угол .
Так как для бесконечно малого перемещения рычага можно считать, что траектория перемещения перпендикулярна рычагу , используя соотношения для прямоугольного треугольника, можно записать следующее равенство:  , где в случае малого угла справедливо
, где в случае малого угла справедливо  и, следовательно,
и, следовательно,  .
.
Для проекции вектора силы на вектор видно, что угол  , а так как
, а так как  , получаем, что
, получаем, что  .
.
Теперь запишем бесконечно малую работу через новые равенства:  , или
, или  .
.
Видно, что произведение  есть не что иное, как модуль векторного произведения векторов и , то есть
есть не что иное, как модуль векторного произведения векторов и , то есть  , которое и было принято обозначить за момент силы
, которое и было принято обозначить за момент силы  , или модуль вектора момента силы
, или модуль вектора момента силы  .
.
Теперь полная работа записывается просто:  , или
, или  .
.
См. также[править | править код]
- Момент инерции
- Момент импульса
- Теорема Вариньона
Определение
Момент силы — это крутящий или вращательный момент, который является векторной величиной.
Чтобы определить, чему равен момент силы, нужно получить произведение вектора силы и радиус-вектора, который проводится к точке приложения силы от оси вращения. Поэтому величину можно назвать характеристикой вращательного воздействия силы на твердое тело.
Термины “крутящий” и “вращающий” моменты в данном случае не являются тождественными. Разница между ними состоит в том, что “вращающий” момент воспринимается как внешнее усилие, которое прикладывают к объекту. Термин “крутящий” же рассматривается как внутреннее усилие, которое появляется при приложении конкретных нагрузок (что делает определение схожим с используемым при изучении сопротивления материалов).
Понятие «момент силы»
Физики воспринимают этот термин в качестве так называемой “вращающей силы”. В соответствии с системой СИ, измеряется данная величина в ньютон-метрах. Иногда в литературе можно также встретить понятие “момент пары сил” (такое определение, например, появляется в исследованиях Архимеда над рычагами).
При использовании простых примеров (например, при приложении силы к рычагу в перпендикулярном отношении к нему) величина рассчитывается как произведение расстояния до оси вращения рычага и непосредственно силы, которая на него воздействует.
Пример: На рычаг оказывает воздействие силы в 3 ньютона, которую прикладывают на расстоянии 2 м от оси вращения рычага. В результате момент силы будет равнозначен силе в 1 ньютон, прикладываемой на расстоянии 6 м по отношению к рычагу.
Как определить, чему равен момент силы
Формула
Точно определить момент действия силы частицы удастся, применив следующую векторную формулу:
[vec{mathrm{M}}=vec{mathrm{r}} vec{mathrm{F}}]
В данном случае [vec{mathrm{r}}] — это радиус вектора частицы, а
[vec{mathrm{F}}] — сила, воздействующая на эту частицу.
Важно помнить, что в физике энергия воспринимается как скалярная величина. В то же время момент силы считается (псевдо)векторной величиной. Поэтому совпадение размерностей указанных величин никогда не бывает случайным. Например, момент силы в 1 Н/м, приложенный через целый оборот, при выполнении механической работы сообщает энергию в 2 Дж. В математическом отображении эта формула момента силы будет выглядеть так:
[mathbf{E}=mathbf{M} boldsymbol{theta}], где:
- [mathbf{E}] — это энергия;
- [mathbf{M}] — это вращающийся момент;
- [boldsymbol{theta}] — это угол в радианах.
В современных условиях момент силы измеряется при помощи особых датчиков нагрузки, которые могут быть трех типов:
- оптического;
- тензометрического;
- индуктивного.
Применение специальной техники позволяет определить величину предельно точно и избавляет ученых от необходимости производить лишние расчеты.

Нет времени решать самому?
Наши эксперты помогут!
Момент силы: формулы
Наиболее интересным в физике считается определение момента силы в поле. Для этого используется следующая формула:
[vec{M}=vec{M_{1}} vec{F}]
Где:
[vec{M_{1}}]- это момент рычага;
[vec{F}]- это величина силы, действующей на тело.
У такой формулы момента силы в физике будет один недостаток. С ее помощью не удастся определить, в каком направлении направлен момент силы. Известной станет только его величина. Если сила окажется перпендикулярной вектору, тогда момент рычага окажется равен расстоянию от центра до точки, в которой была приложена сила. В таком случае момент силы достигнет максимального значения:
[vec{T}=vec{r} quad vec{F}]
Если сила совершает какое-либо действие на определенном расстоянии, она параллельно выполняет механическую работу относительно того же объекта. В таком случае в физической практике считается, что и момент силы выполняет работу (при совершении действия через угловое расстояние).
[mathrm{P}=mathrm{M} {omega}]
Международная система измерений предлагает определять мощность в Ваттах, при этом момент силы измеряется в радианах в секунду. Для определения величину угловой скорости используется единица “радианы в секунду”).
Как определяется момент действия нескольких сил
Если на тело действуют одновременно две равные по величине и противоположно направленные силы (не лежащие на одной и той же прямой), оно находится в состоянии равновесия. Такая ситуация связана с тем, что результирующий момент данных сил по отношению к любой из осей не обладает нулевым значением. Ведь обе силы направлены в одну сторону момента и являются парой сил.
Если тело закреплено на оси, оно будет вращаться под влиянием пары сил. Когда же пара сил прилагается по отношению к свободному телу, последнее начнет крутиться вокруг той оси, которая проходит через центр тяжести.
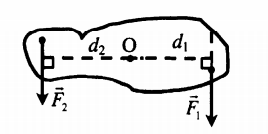
В соответствии с правилом моментов сил в физике, момент пары сил считается одинаковым по отношению к любой оси, перпендикулярной плоскости этой пары. При этом суммарный момент пары M всегда определяется как произведение плеча пары (то есть расстояния l между силами) и одной из этих сил F. Данный расчет производится независимо от типов отрезков, на которые разделяется положение оси.
[mathrm{M}=mathrm{FL}_{1}+mathrm{FL}-2=mathrm{FL}_{1}+mathrm{L}_{2}=mathrm{FL}]
В случае, если равнодействующая момент нескольких сил равняется нулю, он будет одинаковым по отношению ко всем параллельным друг другу осям. Именно поэтому воздействие всех сил на тело можно заменить действием только одной пары сил, имеющих точно такой же момент.
4. Статика и механические колебания
1. Вспоминай формулы по каждой теме
2. Решай новые задачи каждый день
3. Вдумчиво разбирай решения
Момент силы, механическое равновесие тела
При одновременном действии на одно тело нескольких сил тело движется с ускорением.
Линия действия силы — прямая, проходящая через вектор силы. Если силы действуют параллельно друг другу, то точки приложения результирующей силы нет.
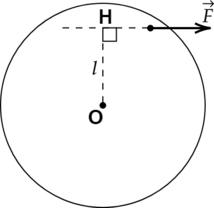
Момент силы относительно оси вращения — это произведение силы на плечо. [vec{M}=vec{F}vec{l}]
Плечо силы — это расстояние от оси вращения до линия действия силы. В качестве примера на рисунке изображён некий диск, к которому приложена сила (vec{F}). Ось вращения перпендикулярна плоскости чертежа и проходит через точку O. Плечом силы является величина (l = OH), где (displaystyle H) — основание перпендикуляра, опущенного из точки O на линию действия силы.
Момент силы считается положительным, если сила стремится поворачивать тело против часовой стрелки, и отрицательным, если по часовой стрелке.
Правило моментов
Тело, имеющее неподвижную ось вращения, находится в равновесии, если алгебраическая сумма моментов всех приложенных к телу сил равна нулю.
Условия равновесия тела:
1) Силы уравновешены вдоль любой оси.
2) Суммарный момент сил, вращающих тело в одну сторону, равен суммарному моменту сил, вращающих тело в другую сторону.
Также условия равновесия тела можно сформулировать следующим образом:
1) Равна нулю векторная сумма всех сил, приложенных к телу.
2) Равна нулю алгебраическая сумма моментов всех сил, приложенных к телу, относительно данной оси вращения или любой другой оси, параллельной данной.
Центр тяжести тела — центр параллельных сил тяжести элементарных частей этого тела.
1) Если однородное тело имеет ось симметрии, то центр тяжести находится на этой оси.
2) Если однородное тело имеет плоскость симметрии, то центр тяжести находится в этой плоскости.
3) Если однородное тело имеет центр симметрии, то центр тяжести находится в этой точке.
Виды равновесия
Равновесие называется устойчивым, если после небольших внешних воздействий тело возвращается в исходное состояние равновесия.
Равновесие называется неустойчивым, если при небольшом смещении тела из положения равновесия равнодействующая приложенных к нему сил отлична от нуля и направлена от положения равновесия.
Равновесие называется безразличным, если при небольшом смещении тела из положения равновесия равнодействующая приложенных к нему сил равна нулю.
Сила, приложенная к рычагу слева равна 300 Н. Какой длины должно быть ее плечо, чтобы рычаг находился в равновесии, если момент силы, действующей на него справа, равен 90 Н(cdot)м? (Ответ дайте в сантиметрах.)
Пусть (M_1) – момент силы, приложенной к рычагу справа, а (M_2) – слева. Чтобы рычаг находился в равновесии, моменты сил, действующих на него слева и справа, должны быть равны: [M_1 = M_2] В то же время момент силы (M_2) по определению равен произведению силы на ее плечо: [M_2 = Fcdot{l},] где (F) – величина силы, приложенной слева; (l) – длина плеча слева. Исходя из этого получаем, что: [M_1 = Fcdot{l}] Отсюда выразим (l): [l = frac{M_1}{F}] [l = frac{90text{ Н}cdot{text{м}}}{300text{ Н}} = 0,3text{ м} = 30text{ см }]
Ответ: 30
Тело массой 1 кг подвешено к правому плечу невесомого рычага (см. рисунок). К какому делению левого плеча рычага нужно подвесить груз массой 3,5 кг для достижения равновесия?
Пусть масса правого груза (m_1), а левого – (m_2).
Обозначим длину одного деления за (l). Тогда, исходя из рисунка, длина правого плеча равна (l_1 = 7l), а длина левого плеча равна (l_2 = nl), где (n) – количество делений.
Чтобы рычаг достиг равновесия, моменты сил, действующих на него справа и слева, должны быть равны: (M_1 = M_2).
В то же время моменты сил (M_1) и (M_2) по определению равны произведению силы на ее плечо: [M_1 = F_1l_1] [M_2 = F_2l_2] Отсюда получаем: (F_1l_1 = F_2l_2)
Выразим длину левого плеча рычага: (displaystyle{l_2 = frac{F_1l_1}{F_2}})
На оба груза действует единственная сила – сила тяжести, поэтому: [F_1 = m_1g] [F_2 = m_2g] С учетом этого: [l_2 = displaystyle{frac{m_1gcdot{l_1}}{m_2g}} = frac{m_1l_1}{m_2}] [displaystyle{l_2 = frac{1text{ кг}cdot{7l}}{3,5text{ кг}} = 2l}Rightarrow nl = 2l Rightarrow n = 2]
Ответ: 2
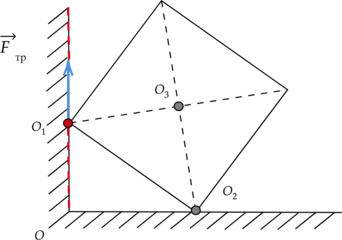
Две вершины однородного железного куба объемом (V = 512) см(^3) опираются на две точки горизонтальной и вертикальной поверхностей, как показано на рисунке. Чему равно плечо силы реакции опоры относительно оси, перпендикулярной плоскости чертежа и проходящей через точку (O_3)? (O_2C = sqrt{7}) см (Ответ дайте в метрах.)
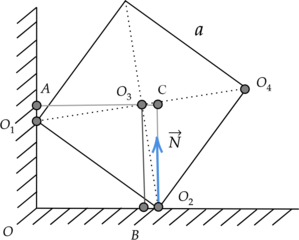
Плечо – это кратчайшее расстояние между осью вращения и линией действия силы. Мысленно продолжим линию действия силы реакции опоры (N) и перпендикуляром соединим ее с прямой, проходящей через точку (O_3). Получаем, что плечом этой силы является отрезок (O_3C).
Воспользуемся геометрией, чтобы найти отрезок (O_3C).
Рассмотрим треугольник (Delta O_1O_2O_4) с прямым углом (O_2): [O_1O_4^2 = O_1O_2^2 + O_4O_2^2] [O_1O_2 = O_2O_4 = a] [displaystyle{O_1O_4 = sqrt{2a^2} = asqrt{2}}] Далее найдем отрезок (O_2O_3): [displaystyle{O_2O_3 = frac{1}{2}O_1O_4} = frac{asqrt{2}}{2}] Рассмотрим треугольник (Delta O_3O_2C) с прямым углом (C): [O_3O_2^2 = O_3C^2 + O_2C^2] [displaystyle{O_3C = {sqrt{O_3O_2^2 – O_2C^2 }}}] [displaystyle{O_3C = {sqrt{left(frac{asqrt{2}}{2}right)^2 – O_2C^2 }}}] Зная объем куба, можно найти его сторону (a): [V = a^3 Rightarrow a = sqrt[3]{V} = sqrt[3]{512text{ см}^3} = 8 text{ см }] Тогда: [displaystyle{O_3C = {sqrt{left(frac{8text{ см}cdotsqrt{2}}{2}right)^2 – (sqrt{7}text{ см})^2 }} = 5 text{ см} = 0,05text{ м }}]
Ответ: 0,05
Две вершины однородного медного куба опираются на две точки горизонтальной и вертикальной поверхностей, как показано на рисунке. Чему равен момент силы трения относительно оси, проходящей через точку (O_1) перпендикулярно плоскости рисунка, если масса куба равна 0,7 кг? (OO_2 = 0,4) м (Ответ дайте в Н(cdot)м)
Момент силы трения (M) равен произведению модуля силы трения (F_text{тр}) на ее плечо (l): [M = F_text{тр}cdot{l}] Прямая (OO_1) – линия действия силы трения. По рисунку видно, что длина плеча силы трения (l) относительно точки (O_1) равна нулю (так как ось вращения, проходящая через точку (O_1), перпендикулярна линии действия силы трения).
Следовательно, и момент силы трения (M) так же равен нулю: [M = F_text{тр}cdot{0}text{ м} = 0text{ Н}cdot{text{м }}]
Ответ: 0
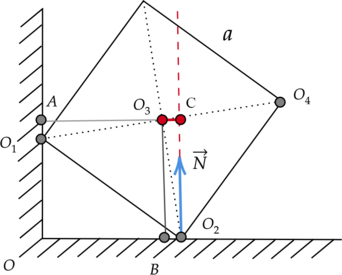
Две вершины однородного деревянного куба со стороной (a = 5sqrt{2}) м опираются на две точки горизонтальной и вертикальной поверхностей, как показано на рисунке. Чему равен момент силы тяжести относительно оси, перпендикулярной плоскости чертежа и проходящей через точку (A)? (AO_1 = 3) м (Ответ дайте в МН(cdot)м и округлите до десятых.) 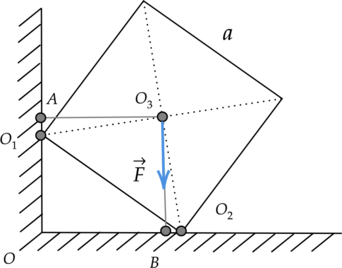
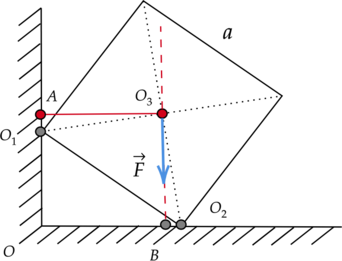
Момент силы тяжести M равен произведению модуля силы тяжести (F) на ее плечо (l): [M = Fcdot{l}] Плечо – это кратчайшее расстояние между осью вращения и линией действия силы. Мысленно продолжим линию действия силы тяжести (F) и перпендикуляром соединим ее с прямой, проходящей через точку (A). Получаем, что плечом силы тяжести является отрезок (AO_3).
Воспользуемся геометрией, чтобы найти отрезок (AO_3).
Рассмотрим треугольник (Delta O_1O_2O_3) с прямым углом (O_3): [O_1O_2^2 = O_1O_3^2 + O_2O_3^2] [O_1O_3 = O_2O_3] [O_1O_2^2 = 2O_1O_3^2] [displaystyle{O_1O_3 = frac{O_1O_2}{sqrt{2}}}] [displaystyle{O_1O_3 = frac{5sqrt{2}}{sqrt{2}}} = 5text{ м }] Рассмотрим треугольник (Delta O_1AO_3) с прямым углом A: [O_1O_3^2 = AO_3^2 + AO_1^2] [AO_3 = sqrt{O_1O_3^2 – AO_1^2}] [AO_3 = sqrt{(5text{ м})^2 – (3text{ м})^2} = 4text{ м }] Сила тяжести равна произведению массы куба (m) на ускорение свободного падения (g): [F = mg] Подставим это значение в исходную формулу: [M = mgcdot{AO_3}] Зная плотность и объем куба, можно найти его массу: [displaystyle{rho =frac{m}{V}},text{ где }V = a^3] [m = rho V = rho a^3] Подставим это значение в предыдущую формулу и найдем искомую величину: [M = rho a^3gcdot{AO_3}] [displaystyle{M = 400text{ }frac{text{кг}}{text{м}^3}cdot{(5sqrt{2}text{ м})}^3cdot{10frac{text{м}}{text{с}^2}}cdot{4}text{ м} approx 5,7text{ М,Н$cdot$м }}]
Ответ: 5,7
На прут массой 1 кг со стороны вертикальной поверхности действует сила трения, равная 3 Н. Найдите момент силы реакции опоры, действующей на него со стороны горизонтальной поверхности, относительно оси, проходящей через точку (O) перпендикулярно плоскости рисунка, если (AB = 6,5) м, а (AC = 9,7) м. (Ответ дайте в Н(cdot)м и округлите до целого числа.) 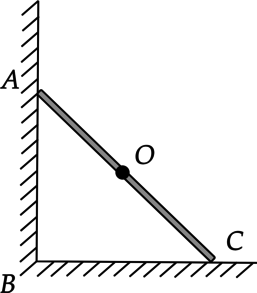
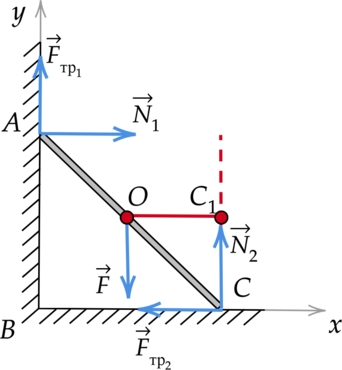
Момент действующей на горизонтальную стенку силы реакции опоры относительно оси, перпендикулярной плоскости рисунка и проходящей через точку (O), равен: [M = N_2l,] где (l) – плечо силы. Мысленно продолжим линию действия силы рекции опоры (N_2) и перпендикуляром соединим ее с прямой, проходящей через точку (O). Получаем, что плечом силы (N_2) является отрезок (OC_1), равный: [displaystyle{OC_1 = frac{BC}{2}} = frac{sqrt{AC^2 – AB^2}}{2}] [OC_1 = frac{sqrt{9,7text{ м}^2 – 6,5text{ м}^2}}{2} = 3,6text{ м }] Чтобы найти неизвестную величину (N_2), укажем все силы, действующие на прут, и запишем второй закон Ньютона с учетом того, что тело находится в равновесии: [vec{F}_{text{тр}1} + vec{N}_1 + vec{F} + vec{N}_2 + vec{F}_{text{тр}2} = 0] Введем оси (OX) и (OY), спроецируем на них все силы. [OX: N_1 – F_{text{тр}2} = 0] [OY: F_{text{тр}1} + N_2 – F = 0] Выразим силу реакции опоры (N_2), действующую на горизонтальную стенку: [N_2 = F – F_{text{тр}1}] Сила тяжести (F) по определению равна: (F = mg), поэтому: [N_2 = mg – F_{text{тр}1}] [N_2 = 1text{ кг}cdot{10text{ }frac{text{м}}{text{c}}^2} – 3text{ H} = 7text{ H }] Подставим найденные значения в начальную формулу: [M = 7{text{ Н}cdot{3,6}text{ м}} = 25,2text{ Н}cdot{text{м}}approx{25}text{ Н}cdot{text{м }}]
Ответ: 25
Группа школьников проводила лабораторную работу, исследуя основные условия равновесия легкого рычага, плечи сил которого равны (l_1) и (l_2). К рычагу с двух сторон ребята подвесили грузы массой (m_1) и (m_2).
Результаты эксперимента были занесены в следующую таблицу:
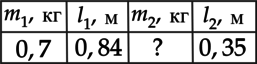
Чему равна масса груза (m_2), если рычаг находился в равновесии? (Ответ дайте в килограммах и округлите до десятых.)
Так как рычаг находился в равновесии, то моменты сил, действующих на него справа и слева, должны быть равны: (M_1 = M_2).
В то же время моменты сил (M_1) и (M_2) по определению равны произведению силы на ее плечо: [M_1 = F_1l_1] [M_2 = F_2l_2] Отсюда получаем: (F_1l_1 = F_2l_2)
На оба груза действует единственная сила – сила тяжести, поэтому: [F_1 = m_1g] [F_2 = m_2g] С учетом этого: (M_1 = m_1gcdot{l_1}) и (M_2 = m_2gcdot{l_2}). Приравняв (M_1) и (M_2), получаем, что: [m_1gcdot{l_1} = m_2gcdot{l_2}] [m_1l_1 = m_2l_2] Выразим массу второго груза (m_2): [displaystyle{m_2 = frac{m_1l_1}{l_2}}] [displaystyle{m_2 = frac{0,7text{ кг}cdot{0,84text{ м}}}{0,35text{ м}}} approx 1,7text{ кг }]
Ответ: 1,7
![]()

УСТАЛ? Просто отдохни

Екатерина Владимировна Мосина
Эксперт по предмету «Физика»
Задать вопрос автору статьи
Определение 1
Моментом силы представляется крутящий или вращательный момент, являясь при этом векторной физической величиной.
Она определяется как векторное произведение вектора силы, а также радиус-вектора, который проведен от оси вращения к точке приложения указанной силы.
Момент силы выступает характеристикой вращательного воздействия силы на твердое тело. Понятия «вращающий» и «крутящий» моменты не будут считаться при этом тождественными, поскольку в технике понятие «вращающий» момент рассматривают как внешнее, прикладываемое к объекту, усилие.
В то же время, понятие «крутящий» рассматривается в формате внутреннего усилия, возникающего в объекте под воздействием определенных приложенных нагрузок (подобным понятием оперируют при сопротивлении материалов).
![]()
Сдай на права пока
учишься в ВУЗе
Вся теория в удобном приложении. Выбери инструктора и начни заниматься!
Получить скидку 3 000 ₽
Понятие момента силы
Момент силы в физике может рассматриваться в виде так называемой «вращающей силы». В СИ за единицу измерения принимают ньютон-метр. Момент силы также может называться «моментом пары сил», что отмечено в работах Архимеда над рычагами.
Замечание 1
В простых примерах, при приложении силы к рычагу в перпендикулярном отношении к нему, момент силы будет определяться в виде произведения величины указанной силы и расстояния до оси вращения рычага.
К примеру, сила в три ньютона, приложенная на двухметровом расстоянии от оси вращения рычага, создает момент, равнозначный силе в один ньютон, приложенной на 6-метровом расстоянии к рычагу. Более точно момент силы частицы определяют в формате векторного произведения:
$vec {M}=vec{r}vec{F}$, где:
- $vec {F}$ представляет силу, воздействующая на частицу,
- $vec {r}$ является радиусом вектора частицы.
В физике следует понимать энергию как скалярную величину, в то время как момент силы будет считаться величиной (псевдо) векторной. Совпадение размерностей подобных величин не будет случайным: момент силы в 1 Н•м, который приложен через целый оборот, совершая механическую работу, сообщает энергию в 2 $pi$ джоулей. Математически это выглядит так:
«Момент силы, формулы» 👇
$E = Mtheta $, где:
- $E$ представляет энергию;
- $M$ считается вращающимся моментом;
- $theta $ будет углом в радианах.
Сегодня измерение момента силы осуществляют посредством задействования специальных датчиков нагрузки тензометрического, оптического и индуктивного типа.
Формулы расчета момента силы
Интересным в физике является вычисление момента силы в поле, производимого по формуле:
$vec{M} = vec{M_1}vec{F}$, где:
- $vec{M_1}$ считается моментом рычага;
- $vec{F}$ представляет величину действующей силы.
Недостатком такого представления будет считаться тот факт, что оно не определяет направление момента силы, а только лишь его величину. При перпендикулярности силы вектору вектору $vec{r}$ момент рычага будет равен расстоянию от центра до точки приложенной силы. При этом момент силы окажется максимальным:
$vec{T}=vec{r}vec{F}$
При совершении силой определенного действия на каком-либо расстоянии, она совершит механическую работу. Точно также и момент силы (при выполнении действия через угловое расстояние) совершит работу.
$P = vec {M}omega $
В существующей международной системе измерений мощность $P$ будет измеряться в Ваттах, а непосредственно момент силы— в ньютон-метрах. При этом угловая скорость определяется в радианах в секунду.
Момент нескольких сил
Замечание 2
При воздействии на тело двух равных, а также противоположно направленных сил, не лежащих при этом на одной и той же прямой, наблюдается отсутствие пребывания этого тела в состоянии равновесия. Это объясняется тем, что результирующий момент указанных сил относительно любой из осей не имеет нулевого значения, поскольку обе представленные силы имеют направленные в одну сторону моменты (пара сил).
В ситуации, когда тело закрепляется на оси, произойдет его вращение под воздействием пары сил. Если пара сил будет приложенной в отношении свободного тела, оно в таком случае станет вращаться вокруг проходящей сквозь центр тяжести тела оси.
Момент пары сил считается одинаковым в отношении любой оси, которая перпендикулярна плоскости пары. При этом суммарный момент $М$ пары всегда будет равным произведению одной из сил $F$ на расстояние $l$ между силами (плечо пары) в независимости от типов отрезков, на которые оно разделяет положение оси.
$M={FL_1+FL-2} = F{L_1+L_2}=FL$
В ситуации, когда равнодействующая момента нескольких сил равнозначна нулю, он будет считаться одинаковым относительно всех параллельных друг другу осей. По этой причине воздействие на тело всех этих сил возможно заменить действием всего лишь одной пары сил с таким же моментом.
Находи статьи и создавай свой список литературы по ГОСТу
Поиск по теме
Статика — раздел механики, изучающий условия равновесия тел.
Виды равновесия
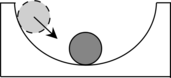
Устойчивое равновесие |
|
 |
Если тело вывести из устойчивого равновесия, то появляется сила, возвращающая его в положение равновесия. Устойчивому равновесию соответствует минимальное значение потенциальной энергии (Ep min). |
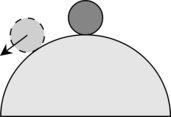
Неустойчивое равновесие |
|
 |
Если тело вывести из неустойчивого равновесия, то возникает сила, удаляющая тело от положения равновесия. Неустойчивому равновесию соответствует максимальное значение потенциальной энергии (Ep max). |
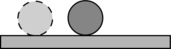
Безразличное равновесие |
|
 |
При выведении тела из положения безразличного равновесия дополнительных сил не возникает. |
Момент силы
Определение
Момент силы — векторная физическая величина, модуль которой равен произведению модуля силы на плечо силы:
M = Fd
M — момент силы. Единица измерения — Ньютон на метр (Н∙м). Направление вектора момента силы всегда совпадает с направлением вектора силы. d — плечо силы. Единица измерения — метр (м).
Плечо силы — кратчайшее расстояние между осью вращения и линией действия силы.
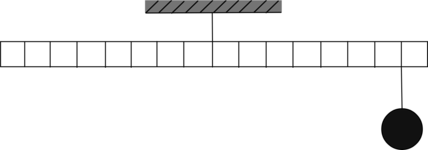
Пример №1. Стальной шар массой 2 кг колеблется на нити длиной 1 м. Чему равен момент силы тяжести относительно оси, проходящей через точку О перпендикулярно плоскости чертежа, в состоянии, представленном на рисунке?
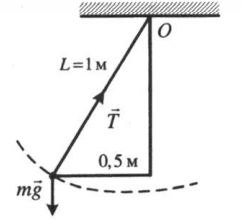
Плечом силы тяжести, или кратчайшим путем от прямой, проходящей через точку О перпендикулярно плоскости чертежа, до линии действия силы тяжести, будет отрезок, равный максимальному отклонению шара от положения равновесия. Следовательно:
M = Fd = mgd = 2∙10∙0,5 = 10 (Н∙м)
Момент силы может быть положительным и отрицательным.
Если сила вызывает вращение тела по часовой стрелке, то такой момент считают положительным:
M1 = F1d1
Если сила вызывает вращение тела против часовой стрелки, то такой момент считают отрицательным:
M2 = F2d2
Правило моментов
Тело, имеющее неподвижную ось вращения, находится в равновесии, если алгебраическая сумма моментов всех приложенных к телу сил относительно этой оси равна нулю:
∑Mi=0
Иначе правило моментов можно сформулировать так:
Сумма моментов сил, вызывающих вращение тела по часовой стрелке, равна сумме моментов сил, вызывающих вращение тела против часовой стрелки.
∑Mпо час. стр.=∑Mпр. час. стр.
Условия равновесия тел
| Тело не участвует в поступательном движении: |
∑→Fi=0; →vo=0 |
| Тело не участвует во вращательном движении: |
∑Mi=0; ω0=0 |
| Тело находится в состоянии равновесия (не участвует ни в поступательном, ни во вращательном движении) |
∑→Fi=0; →vo=0 и ∑→Fi=0; →vo=0 |
Простые механизмы
Определение
Простые механизмы — приспособления, служащие для преобразования силы. К ним относится рычаг, наклонная плоскость, блоки, клин и ворот.
Наклонная плоскость |
|
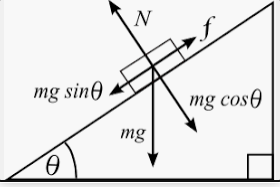 |
Дает выигрыш в силе. Чтобы поднять груз на высоту h, нужно приложить силу, равную силе тяжести этого груза. Но, используя наклонную плоскость, можно приложить силу, равную произведению силы тяжести на синус угла уклона плоскости: mgsinθ<mg |
Рычаг |
|
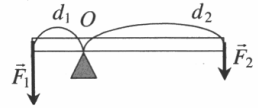 |
Дает выигрыш в силе, равный отношению плеча второй силы к плечу первой: F1F2=d2d1 |
Неподвижный блок |
|
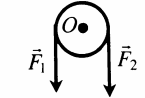 |
Изменяет направление действия силы. Модули и плечи сил при этом равны: F1 = F2 M1 = M2 |
Подвижный блок |
|
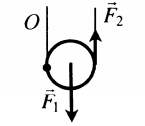 |
Дает выигрыш в силе в 2 раза:
d1 = R d2 = 2R F1 = 2F2 |
Клин |
|
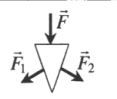 |
Делит силу на две равные части, направление которых зависит от формы клина: →F=→F1+→F2 |
Золотое правило механики
При использовании простых механизмов мы выигрываем в силе, но проигрываем в расстоянии. Поэтому выигрыша в работе простые механизмы не дают.
Задание EF22660
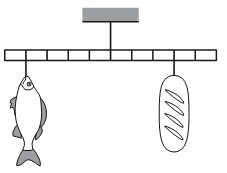 Мальчик взвесил рыбу на самодельных весах с коромыслом из лёгкой рейки (см. рисунок). В качестве гири он использовал батон хлеба массой 0,8 кг. Определите массу рыбы.
Мальчик взвесил рыбу на самодельных весах с коромыслом из лёгкой рейки (см. рисунок). В качестве гири он использовал батон хлеба массой 0,8 кг. Определите массу рыбы.
Алгоритм решения
1.Записать исходные данные.
2.Записать правило моментов и выполнить решение в общем виде.
3.Подставить известные данные и вычислить искомую величину.
Решение
Известна лишь масса батона: m1 = 0,8 кг. Но мы также можем выразить плечи для силы тяжести батона и хлеба. Для этого длину линейки примем за один. Так как линейка поделена на 10 секций, можем считать, что длина каждой равна 0,1. Тогда плечи сил тяжести батона и рыба соответственно равны:
d1 = 0,3
d2 = 0,4
Запишем правило моментов:
F1 d1 = F2 d2
Сила тяжести равна произведению массы на ускорение свободного падения. Поэтому:
m1gd1 = m2gd2
m1d1 = m2d2
Отсюда масса рыбы равна:
m2=m1d1d2=0,8·0,30,4=0,6 (кг)
Ответ: 0,6
pазбирался: Алиса Никитина | обсудить разбор
Задание EF18706
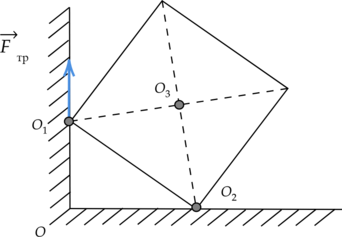
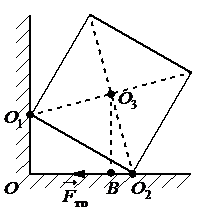 Однородный куб опирается одним ребром на пол, другим на вертикальную стену (см. рисунок). Плечо силы трения Fтр относительно оси, проходящей через точку О3 перпендикулярно плоскости чертежа, равно…
Однородный куб опирается одним ребром на пол, другим на вертикальную стену (см. рисунок). Плечо силы трения Fтр относительно оси, проходящей через точку О3 перпендикулярно плоскости чертежа, равно…
Ответ:
а) 0
б) О2О3
в) О2В
г) О3В
Алгоритм решения
- Сформулировать определение плеча силы.
- Найти плечо силы трения и аргументировать ответ.
Решение
Плечом силы трения называют кратчайшее расстояние от оси вращения до линии, вдоль которой действует сила. Чтобы найти такое расстояние, нужно провести из точки равновесия перпендикуляр к линии действия силы трения. Отрезок, заключенный между этой точкой и линией, будет являться плечом силы трения. На рисунке этому отрезку соответствует отрезок О3В.
Ответ: г
pазбирался: Алиса Никитина | обсудить разбор
Алиса Никитина | Просмотров: 9.6k
