Траектория, длина пути, вектор перемещения
Траектория движения тела – это линия, которая была описана материальной точкой при перемещении из одной точки в другую с течением времени.
Виды движений тела
Существуют несколько видов движений и траекторий твердого тела:
- поступательное;
- вращательное, то есть движение по окружности;
- плоское, то есть перемещение по плоскости;
- сферическое, характеризующее движение по поверхности сферы;
- свободное, иначе говоря, произвольное.
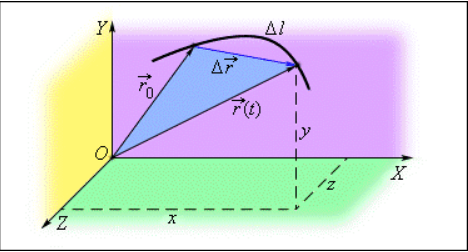
Рисунок 1 . Определение точки при помощи координат x = x ( t ) , y = y ( t ) , z = z ( t ) и радиус-вектора r → ( t ) , r 0 → является радиус-вектором точки в начальный момент времени
Положение материальной точки в пространстве в любой момент времени может быть задано при помощи закона движения, определенный координатным способом, через зависимость координат от времени x = x ( t ) , y = y ( t ) , z = z ( t ) или от времени радиус-вектора r → = r → ( t ) , проведенного из начала координат к заданной точке. Это показано на рисунке 1 .
Перемещение тела
Перемещение тела s → = ∆ r 12 → = r 2 → – r 1 → – направленный отрезок прямой, соединяющий начальную с конечной точкой траектории тела. Значение пройденного пути l равняется длине траектории, пройденной телом за определенный промежуток времени t .
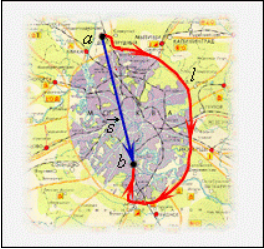
Рисунок 2 . Пройденный путь l и вектор перемещения s → при криволинейном движении тела, a и b – начальная и конечная точки пути, принятые в физике
По рисунку 2 видно, что при движении тела по криволинейной траектории модуль вектора перемещения всегда меньше пройденного пути.
Перемещение принято считать векторной величиной. Этот отрезок имеет направление.
Путь – скалярная величина. Считается числом.
Сумма двух последовательных перемещений из точки 1 в точку 2 и из токи 2 в точку 3 является перемещением из точки 1 в точку 3 , как показано на рисунке 3 .
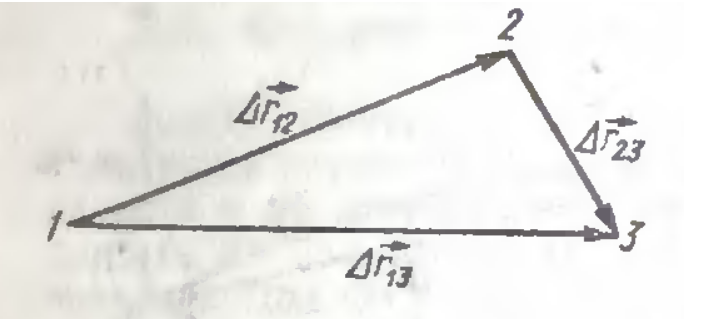
Рисунок 3 . Сумма двух последовательных перемещений ∆ r → 13 = ∆ r → 12 + ∆ r → 23 = r → 2 – r → 1 + r → 3 – r → 2 = r → 3 – r → 1
Когда радиус-вектор материальной точки в определенный момент времени t является r → ( t ) , в момент t + ∆ t есть r → ( t + ∆ t ) , тогда ее перемещение ∆ r → за время ∆ t равняется ∆ r → = r → ( t + ∆ t ) – r → ( t ) .
Перемещение ∆ r → считается функцией времени t : ∆ r → = ∆ r → ( t ) .
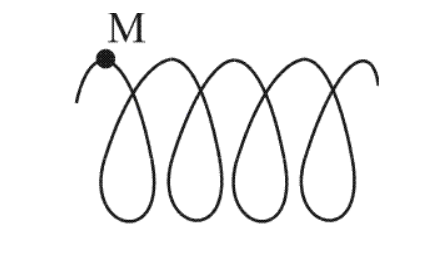
По условию дан движущийся самолет, представленный на рисунке 4 . Определить вид траектории точки М .
Необходимо рассмотреть систему отсчета I , называемую «Самолет» с траекторией движения точки М виде окружности.

Будет задана система отсчета II «Земля» с траекторией движения имеющейся точки М по спирали.
Дана материальная точка, которая совершает движение из А в В . Значение радиуса окружности R = 1 м . Произвести нахождение S , ∆ r → .
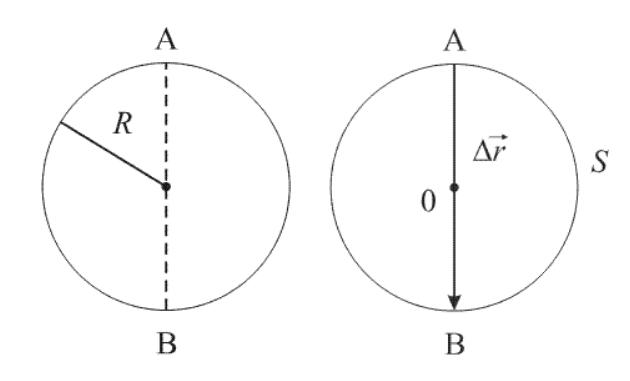
Во время движения из А в В точка проходит путь, который равен половине окружности, записываемой формулой:
Подставляем числовые значения и получаем:
S = 3 , 14 · 1 м = 3 , 14 м .
Перемещением ∆ r → в физике считается вектор, соединяющий начальное положение материальной точки с конечным, то есть А с В .
Вектор скорости и ускорения материальной точки и их модули. Пример решения задач.
В очередной раз меня попросили решить пару задачек по физике, и я вдруг обнаружил, что не могу решить их с ходу. Немного погуглив, я обнаружил, что сайты в топе выдачи содержат сканы одного и того же учебника и не описывают конкретных примеров решений задачи о том, как найти вектор скорости и ускорения материальной точки. По-этому я решил поделиться с миром примером своего решения.
Траектория движения материальной точки через радиус-вектор
Подзабыв этот раздел математики, в моей памяти уравнения движения материальной точки всегда представлялись при помощи знакомой всем нам зависимости y(x) , и взглянув на текст задачи, я немного опешил когда увидел векторы. Оказалось, что существует представление траектории материальной точки при помощи радиус-вектора – вектора, задающего положение точки в пространстве относительно некоторой заранее фиксированной точки, называемой началом координат.

Формула траектория движения материальной точки помимо радиус-вектора описывается так же ортами – единичными векторами i, j , k в нашем случае совпадающими с осями системы координат. И, наконец, рассмотрим пример уравнения траектории материальной точки (в двумерном пространстве):

Что интересного в данном примере? Траектория движения точки задается синусами и косинусами, как вы думаете, как будет выглядеть график в всем нам знакомом представлении y(x) ? “Наверное какой-то жуткий”, подумали вы, но все не так сложно как кажется! Попробуем построить траекторию движения материальной точки y(x), если она движется по представленному выше закону:

Здесь я заметил квадрат косинуса, если вы в каком-нибудь примере видите квадрат синуса или косинуса, это значит что нужно применять основное тригонометрическое тождество, что я и сделал (вторая формула) и преобразовал формулу координаты y, чтобы вместо синуса подставить в нее формулу изменения x:

В итоге жуткий закон движения точки оказался обычной параболой, ветви которой направлены вниз. Надеюсь, вы поняли примерный алгоритм построения зависимости y(x) из представления движения через радиус-вектор. Теперь перейдем к нашему главному вопросу: как же найти вектор скорости и ускорения материальной точки, а так же их модули.
Вектор скорости материальной точки

Всем известно, что скорость материальной точки – это величина пройденного пути точкой за единицу времени, то есть производная от формулы закона движения. Чтобы найти вектор скорости нужно взять производную по времени. Давайте рассмотрим конкретный пример нахождения вектора скорости.
Пример нахождения вектора скорости
Имеем закон перемещения материальной точки:

Теперь нужно взять производную от этого многочлена, если вы забыли как это делается, то вот вам таблица производных различных функций. В итоге вектор скорости будет иметь следующий вид:

Все оказалось проще, чем вы думали, теперь найдем вектор ускорения материальной точки по тому же самому закону, представленному выше.
Как найти вектор ускорения материальной точки

Вектор ускорения точки это векторная величина, характеризующая изменение с течением времени модуля и направления скорости точки. Чтобы найти вектор ускорения материальной точки в нашем примере, нужно взять производную, но уже от формулы вектора скорости, представленной чуть выше:

Модуль вектора скорости точки
Теперь найдем модуль вектора скорости материальной точки. Как вы знаете из 9-го класса, модуль вектора – это его длина, в прямоугольных декартовых координатах равна квадратному корню из суммы квадратов его координат. И откуда же из полученного нами выше вектора скорости взять его координаты спросите вы? Все очень просто:

Теперь достаточно только подставить время, указанное в задаче и получить конкретное числовое значение.
Модуль вектора ускорения
Как вы поняли из написанного выше (и из 9-го класса), нахождение модуля вектора ускорения происходит тем же образом, что и модуля вектора скорости: извлекаем корень квадратный из суммы квадратов координат вектора, все просто! Ну и вот вам, конечно же, пример:

Как вы видите, ускорение материальной точки по заданному выше закону не зависит от времени и имеет постоянную величину и направление.
Еще примеры решений задачи нахождения вектора скорости и ускорения
А вот тут вы можете найти примеры решения и других задач по физике на тему “механика твердых тел”. А для тех, кто не совсем понял как найти вектор скорости и ускорения, вот вам еще парочка примеров из сети без всяких лишних объяснений, надеюсь, они вам помогут.

Если у вас возникли какие-нибудь вопросы, вы можете задать их в комментариях.
Способы описания движения. Векторный способ. Координатный способ




По этой ссылке вы найдёте полный курс лекций по математике:
кинематике существуют три способа аналитического описания движения материальной точки в пространстве. Рассмотрим их, ограничившись случаем движения материальной точки на плоскости, что позволит нам при выборе системы отсчёта задавать лишь две координатные оси. Рис. 1 Рис. 2 1.
Векторный способ. В этом способе положение материальной точки А задаётся с помощью так называемого радиус-вектора г, который представляет совой вектор, проведённый из точки О, соответствующей началу отсчёта выбранной системы координат, в интересующую нас точку А (рис. 1). В процессе движения материальной точки её радиус-вектор может изменяться как по модулю, так и по направлению, являясь функцией времени г = r(t).
Геометрическое место концов радиус-вектора г (t) называют траекторией точки А. В известном смысле траектория движения представляет собой след (явный или воображаемый), который «оставляет за собой» точка А после прохождения той или иной области пространства. Понятно, что геометрическая форма траектории зависит от выбора системы отсчёта, относительно которой ведётся наблюдение за движением точки.
Пусть в процессе движения по некоторой траектории в выбранной системе отсчёта за промежуток времени At тело (точка А) переместилось из начального положения 1 с радиус-вектором Т в конечное положение 2 с радиус-вектором Т (рис. 2). Приращение А г радиус-вектора тела в таком случае равно: Вектор Аг, соединяющий начальное и конечное положения тела, называют перемещением тела. Отношение Аг/At называют средней скоростью (средним вектором скорости) vcp тела за время At: Способы описания движения.
Векторный способ. Координатный способ. Естественный (или траекторный) способ Вектор vcp колли неарен и сонаправлен с вектором Аг, так как отличается от последнего лишь скалярным неотрицательным множителем 1 / Аг. Предложенное определение средней скорости справедливо для любых значений At, кроме Д/ = 0. Однако ничто не мешает брать промежуток времени At сколь угодно малым, но отличным от нуля.
Для точного описания движения вводят понятие мгновенной скорости, то есть скорости в конкретный момент времени t или в конкретной точке траектории. С этой целью промежуток времени At устремляют к нулю. Вместе с ним будет стремиться к нулю и перемещение Аг. При этом отношение А/ / At стремится к определённому значению, не зависящему от At. Величина, к которой стремится отношение Аг / At при стремлении At к нулю, называется мгновенной скоростью v: Теперь заметим, что чем меньше At, тем ближе направление Аг к направлению касательной к траектории в данной точке.
Следовательно, вектор мгновенной скорости направлен по касательной к траектории в данной точке в сторону движения тела. В дальнейшем там, где это не повлечёт недоразумений, мы будем опускать прилагательное «мгновенная» и говорить просто о скорости v тела (материальной точки). Движение тела принято характеризовать также ускорением, по которому судят об изменении скорости в процессе движения.
Его определяют через отношение приращения вектора скорости Av тела к промежутку времени А/, в течение которого это приращение произошло.
Ускорением а тела называется величина, к которой стремится отношение Av / At при стремлении к нулю знаменателя At: При уменьшении At ориентация вектора Av будет приближаться к определённому направлению, которое принимается за направление вектора ускорения а . Заметим, что ускорение направлено в сторону малого приращения скорости, а не в сторону самой скорости! Способы описания движения. Векторный способ. Координатный способ.
Возможно вам будут полезны данные страницы:
Естественный (или траекторный) способ Таким образом, зная зависимость г(/), можно найти скорость v и ускорение а тела в каждый момент времени. В этой связи возникает и обратная задача о нахождении скорости v(t) и радиус-вектора r(t) по известной зависимости от времени ускорения а . Для однозначного решения этой задачи необходимо знать начальные условия, т. е. скорость v0 и радиус-вектор г0 тела в начальный момент времени / = 0.
Напомним, что в системе СИ единицами длины, скорости и ускорения являются соответственно метр (м), метр в секунду (м/с) и метр на секунду в квадрате (м/с2 2. Координатный способ. В этом способе положение материальной точки А на плоскости в произвольный момент времени t определяется двумя координатами хну, которые представляют собой проекции радиус-вектора г тела на оси Ох и Оу соответственно (рис. 3). При движении тела его координаты изменяются со временем, т. е. являются функциями V= y(t).
Если эти функции известны
то они определяют положение тела на плоскости в любой момент времени. В свою очередь, вектор скорости v можно спроецировать на оси координат и определить таким образом скорости i и v.. изменения координат тела (рис. 4). В самом деле, vx и vy будут равны значениям, к которым стремятся соответственно отношения Ах/А t и Ay/At при стремлении к нулю промежутка времени At. Аналогично с помощью проецирования вектора а определяются ускорения ах и ах тела по направлениям координатных осей.
Таким образом, зная зависимости л(/) и >>(/), можно найти не только положение тела, но и проекции его скорости и ускорения, а следовательно, модуль и направление векторов v и а в любой момент времени. Например, модуль вектора скорости будет равен v=yjvx2+vv2 , а его направление может быть задано углом между этим вектором и любой осью координат. Так, угол а между вектором v и осью Ох определяется отношением tga = vy!vx. Аналогичными формулами определяются модуль и направление вектора а .
Обратная задача – нахождение скорости и зависимостей x(t) и y(t) по заданному ускорению – будет иметь однозначное решение, если кроме ускорения заданы ещё и начальные условия: проекции скорости и координаты точки в начальный момент времени t = 0. 3. Естественный (или траекторный) сносов. Этот способ применяют тогда, когда траектория материальной точки известна заранее.
На заданной траектории LM (рис. 5) выбирают начало отсчёта – неподвижную точку О, а положение движущейся материальной точки А определяют при помощи так называемой дуговой координаты /, которая представляет собой расстояние вдоль траектории от выбранного начала отсчёта О до точки А. При этом положительное направление отсчёта координаты / выбирают произвольно, по соображениям удобства, например так, как рис ^ показано стрелкой на рисунке 5.
Движение тела определено, если известны его траектория, начало отсчёта О, положительное направление отсчёта дуговой координаты I и зависимость l(t). Следующие два важных механических понятия – это пройденный путь и средняя путевая скорость. По определению, путь AS – это длина участка траектории, пройденного телом за промежуток времени At. Ясно, что пройденный путь – величина скалярная и неотрицательная, а потому его нельзя сравнивать с перемещением А г, представляющем собой вектор.
Сравнивать можно только путь AS и модуль перемещения Аг . Очевидно, что AS > |Аг|. Средней путевой скоростью г>ср тела называют отношение пути AS к промежутку времени At, в течение которого этот путь был пройден: Определённая ранее средняя скорость vc? (см. формулу (1)) и средняя путевая скорость отличаются друг от друга так же, как Аг отличается от AS, но при этом важно понимать, что обе средние скорости имеют смысл только тогда, когда указан промежуток времени усреднения At.
Само слово «средняя» означает усреднение по времени. Пример 1. Городской троллейбус утром вышел на маршрут, а через 8 часов, проехав в общей сложности 72 км, возвратился в парк и занял своё обычное место на стоянке. Какова средняя скорость vcp и средняя путевая скорость г>ср троллейбуса? Способы описания движения.
Векторный способ. Координатный способ. Естественный (или траекторный) способ Решение. Поскольку начальное и конечное положения троллейбуса совпадают, то его перемещение А г равно нулю Аг = 0, следовательно, = 0 . Но средняя путевая скорость троллейбуса не vcp=Ar/At = 0 и рср равна нулю.
Присылайте задания в любое время дня и ночи в ➔ 
Официальный сайт Брильёновой Натальи Валерьевны преподавателя кафедры информатики и электроники Екатеринбургского государственного института.
Все авторские права на размещённые материалы сохранены за правообладателями этих материалов. Любое коммерческое и/или иное использование кроме предварительного ознакомления материалов сайта natalibrilenova.ru запрещено. Публикация и распространение размещённых материалов не преследует за собой коммерческой и/или любой другой выгоды.
Сайт предназначен для облегчения образовательного путешествия студентам очникам и заочникам по вопросам обучения . Наталья Брильёнова не предлагает и не оказывает товары и услуги.
[spoiler title=”источники:”]
http://natalibrilenova.ru/sposobyi-opisaniya-dvizheniya-vektornyij-sposob-koordinatnyij-sposob/
[/spoiler]
Друзья, здравствуйте! Предлагаю сегодня рассчитать жизненный код судьбы! Посчитав его, вам будет легче понять себя, вектор своего движения, а также свои желания и цели.

Для того, чтобы рассчитать число своего успеха (жизненный код судьбы), нам потребуется:
Шаг 1: Сложить все числа своей даты рождения:
К примеру, вы родились 25.08.1982, Считаем: 2 + 5 + 0 + 8 + 1 + 9 + 8 + 2 = 35 – это число будет первое в коде.
Шаг 2: После этого доводим это первое число до однозначного: 35 = 3 + 5 =
8 – это число будет второе в коде.
Шаг 3: Чтобы получить третье число, нужно умножить второе число (8) на цифру два и привести его к однозначному виду: 8*2 = 16 = 1+6 = 7
Затем получившееся число (7) нужно вычесть из первого числа (35): 35 – 7 = 28 Итак, третье число в коде будет
28
Шаг 4: Четвертое число вычисляется из третьего путем приведения его к односложному виду: 28=2+8=10=1+0=1. Итак четвертое число в коде будет 1
В итоге получился индивидуальный код: первое число=35, второе число=8, третье число=28, и четвертое число=1.Запишите его и дату своего рождения рядом 35 8 28 1 25 8 1982
Затем посчитайте, сколько в этой строке встречается единиц, двоек, троек и т.д. Количество этих чисел и определяет ваш успех и указывает на то, что вам помогает в жизни и то, что мешает вашему благополучию.
Норма для каждого числа в вашем коде — это три. Если одинаковых цифр больше, то это уже отклонения.
Поехали 🚀:
Единицы – если у вас их вообще нет, то вы ведомый человек и стараетесь не выражать свое мнение. Если у вас три единицы – вы человек мягкий и добрый. Если меньше трех – то вы обладаете заниженной самооценкой. Вам необходимо ценить себя и принимать таким, какой вы есть.Двойки – если у вас нет двоек, то у вас слабый энергетический потенциал. Вы быстро устаете как морально, так и физически. Вам необходимо заняться йогой или медитацией, а также носить красную одежду, она восстановит вашу энергию. Если у вас две двойки, то с энергетикой у вас все в порядке. Если три – то у вас есть способности к ясновидению и экстрасенсорике.Если троек больше – то вы представляете для других опасность, старайтесь контролировать свои слова и мысли.Тройки – если у вас нет троек, то вам сложно понять других людей. Старайтесь больше интересоваться другими людьми. Если у вас три тройки – то у вас хорошая интуиция. Если больше – то вы имеете сверхъестественные способности.Четвёрки – если у вас нет четверок, то по натуре вы скрытны и с вами не просто ужиться. Если у вас есть хоть одна четверка – то ваша сильная сторона – это дипломатические способности и бесконфликтность. Если три или две – то у вас есть все шансы добиться успехов в спорте. Если больше трех – вы слишком лживы.Пятёрки – если их нет, то вы человек грубый и властный. Если одна или две – то у вас доброе сердце. Если три или четыре – это признак большого терпения и милосердия. В этом случае не стоит полностью доверяться людям, они могут воспользоваться вашей добротой.Шестёрки – если их нет, то вы натура склонная к лени. Если шестерки три – то вы очень трудолюбивый и выносливый человек. Больше четырех, – вас гложет зависть и это вам мешает жить.Семёрки – если нет семерок, то вами легко управлять. Согласно нумерологии по дате рождения вы не умеете отказывать людям и во всем вините себя. Если две семерки – то на вашей стороне всегда удача. Если больше – это признак «второго счастья» – наглости.Восьмёрки – если нет восьмёрок или всего одна, то вам предстоит всего добиться собственным трудом, Фортуна к вам не благосклонна. Если три восьмёрки – признак богатства и везения. Используйте свою интуицию, чтобы достичь своих целей.
Девятки – отражают аналитические способности. Чем их больше, тем сильнее они проявляются в вас.
Нули – не учитываются в этом расчете.
ВАЖНО: У многих людей код судьбы не шестизначный, а семизначный. Такие, люди наделены особой судьбой. Их может ожидать блестящее будущее. Как правило, такой код судьбы встречается у звезд шоу-бизнеса или вестных политиков и успешных бизнесменов.
#нумерология по дате
#юа_нумерология #нумерологический расчет #нумерология онлайн #нумерология обучение #школа нумерологии
#нумерологический расчет #школа нумерологии #нумеролог онлайн #счастливое число
В очередной раз меня попросили решить пару задачек по физике, и я вдруг обнаружил, что не могу решить их с ходу. Немного погуглив, я обнаружил, что сайты в топе выдачи содержат сканы одного и того же учебника и не описывают конкретных примеров решений задачи о том, как найти вектор скорости и ускорения материальной точки. По-этому я решил поделиться с миром примером своего решения.
Траектория движения материальной точки через радиус-вектор
Подзабыв этот раздел математики, в моей памяти уравнения движения материальной точки всегда представлялись при помощи знакомой всем нам зависимости y(x) , и взглянув на текст задачи, я немного опешил когда увидел векторы. Оказалось, что существует представление траектории материальной точки при помощи радиус-вектора – вектора, задающего положение точки в пространстве относительно некоторой заранее фиксированной точки, называемой началом координат.
Формула траектория движения материальной точки помимо радиус-вектора описывается так же ортами – единичными векторами i, j , k в нашем случае совпадающими с осями системы координат. И, наконец, рассмотрим пример уравнения траектории материальной точки (в двумерном пространстве):
Что интересного в данном примере? Траектория движения точки задается синусами и косинусами, как вы думаете, как будет выглядеть график в всем нам знакомом представлении y(x) ? “Наверное какой-то жуткий”, подумали вы, но все не так сложно как кажется! Попробуем построить траекторию движения материальной точки y(x), если она движется по представленному выше закону:
Здесь я заметил квадрат косинуса, если вы в каком-нибудь примере видите квадрат синуса или косинуса, это значит что нужно применять основное тригонометрическое тождество, что я и сделал (вторая формула) и преобразовал формулу координаты y, чтобы вместо синуса подставить в нее формулу изменения x:
В итоге жуткий закон движения точки оказался обычной параболой, ветви которой направлены вниз. Надеюсь, вы поняли примерный алгоритм построения зависимости y(x) из представления движения через радиус-вектор. Теперь перейдем к нашему главному вопросу: как же найти вектор скорости и ускорения материальной точки, а так же их модули.
Вектор скорости материальной точки
Всем известно, что скорость материальной точки – это величина пройденного пути точкой за единицу времени, то есть производная от формулы закона движения. Чтобы найти вектор скорости нужно взять производную по времени. Давайте рассмотрим конкретный пример нахождения вектора скорости.
Пример нахождения вектора скорости
Имеем закон перемещения материальной точки:
Теперь нужно взять производную от этого многочлена, если вы забыли как это делается, то вот вам таблица производных различных функций. В итоге вектор скорости будет иметь следующий вид:
Все оказалось проще, чем вы думали, теперь найдем вектор ускорения материальной точки по тому же самому закону, представленному выше.
Как найти вектор ускорения материальной точки
Вектор ускорения точки это векторная величина, характеризующая изменение с течением времени модуля и направления скорости точки. Чтобы найти вектор ускорения материальной точки в нашем примере, нужно взять производную, но уже от формулы вектора скорости, представленной чуть выше:
Модуль вектора скорости точки
Теперь найдем модуль вектора скорости материальной точки. Как вы знаете из 9-го класса, модуль вектора – это его длина, в прямоугольных декартовых координатах равна квадратному корню из суммы квадратов его координат. И откуда же из полученного нами выше вектора скорости взять его координаты спросите вы? Все очень просто:
Теперь достаточно только подставить время, указанное в задаче и получить конкретное числовое значение.
Модуль вектора ускорения
Как вы поняли из написанного выше (и из 9-го класса), нахождение модуля вектора ускорения происходит тем же образом, что и модуля вектора скорости: извлекаем корень квадратный из суммы квадратов координат вектора, все просто! Ну и вот вам, конечно же, пример:
Как вы видите, ускорение материальной точки по заданному выше закону не зависит от времени и имеет постоянную величину и направление.
Еще примеры решений задачи нахождения вектора скорости и ускорения
А вот тут вы можете найти примеры решения и других задач по физике на тему “механика твердых тел”. А для тех, кто не совсем понял как найти вектор скорости и ускорения, вот вам еще парочка примеров из сети без всяких лишних объяснений, надеюсь, они вам помогут.
Если у вас возникли какие-нибудь вопросы, вы можете задать их в комментариях.
Содержание
- Основы механики для чайников. Часть 1: Кинематика
- Траектория, радиус-вектор, закон движения тела
- Перемещение и путь
- Скорость и ускорение
- Закон равноускоренного движения
- Пример решения задачи
- Тема 1.7. Ускорение точки и его виды
- Вектор скорости и ускорения материальной точки и их модули. Пример решения задач.
- Траектория движения материальной точки через радиус-вектор
- Вектор скорости материальной точки
- Пример нахождения вектора скорости
- Как найти вектор ускорения материальной точки
- Модуль вектора скорости точки
- Модуль вектора ускорения
- Еще примеры решений задачи нахождения вектора скорости и ускорения
Основы механики для чайников. Часть 1: Кинематика

- 12 января 2021 г.
- 9 минут
- 47 247
- 8
В прошлой статье мы немножко разобрались с тем, что такое механика и зачем она нужна. Мы уже знаем, что такое система отсчета, относительность движения и материальная точка. Что ж, пора двигаться дальше! Здесь мы рассмотрим основные понятия кинематики, соберем вместе самые полезные формулы по основам кинематики и приведем практический пример решения задачи.
Присоединяйтесь к нам в телеграм и получайте ежедневную рассылку с полезной информацией по актуальным студенческим вопросам.
Траектория, радиус-вектор, закон движения тела
Кинематикой занимался еще Аристотель. Правда, тогда это не называлось кинематикой. Затем очень большой вклад в развитие механики, и кинематики в частности, внес Галилео Галилей, изучавший свободное падение и инерцию тел.
Итак, кинематика решает вопрос: как тело движется. Причины, по которым оно пришло в движение, ее не интересуют. Кинематике не важно, сама поехала машина, или ее толкнул гигантский динозавр. Абсолютно все равно.
Сейчас мы будем рассматривать самую простую кинематику – кинематику точки. Представим, что тело (материальная точка) движется. Не важно, что это за тело, все равно мы рассматриваем его, как материальную точку. Может быть, это НЛО в небе, а может быть, бумажный самолетик, который мы запустили из окна. А еще лучше, пусть это будет новая машина, на которой мы едем в путешествие. Перемещаясь из точки А в точку Б, наша точка описывает воображаемую линию, которая называется траекторией движения. Другое определение траектории – годограф радиус вектора, то есть линия, которую описывает конец радиус-вектора материальной точки при движении.
Радиус-вектор – вектор, задающий положение точки в пространстве.
Для того, чтобы узнать положение тела в пространстве в любой момент времени, нужно знать закон движения тела – зависимость координат (или радиус-вектора точки) от времени.
Перемещение и путь
Тело переместилось из точки А в точку Б. При этом перемещение тела – отрезок, соединяющий данные точки напрямую – векторная величина. Путь, пройденный телом – длина его траектории. Очевидно, перемещение и путь не стоит путать. Модуль вектора перемещения и длина пути совпадают лишь в случае прямолинейного движения.

В системе СИ перемещение и длина пути измеряются в метрах.
Перемещение равно разнице радиус-векторов в начальный и конечный моменты времени. Другими словами, это приращение радиус вектора.
Скорость и ускорение
Средняя скорость – векторная физическая величина, равная отношению вектора перемещения к промежутку времени, за которое оно произошло
А теперь представим, что промежуток времени уменьшается, уменьшается, и становится совсем коротким, стремится к нулю. В таком случае о средней скорости говорить на приходится, скорость становится мгновенной. Те, кто помнит основы математического анализа, тут же поймут, что в дальнейшем нам не обойтись без производной.
Мгновенная скорость – векторная физическая величина, равная производной от радиус вектора по времени. Мгновенная скорость всегда направлена по касательной к траектории.
В системе СИ скорость измеряется в метрах в секунду
Если тело движется не равномерно и прямолинейно, то у него есть не только скорость, но и ускорение.
Ускорение (или мгновенное ускорение) – векторная физическая величина, вторая производная от радиус-вектора по времени, и, соответственно, первая производная от мгновенной скорости
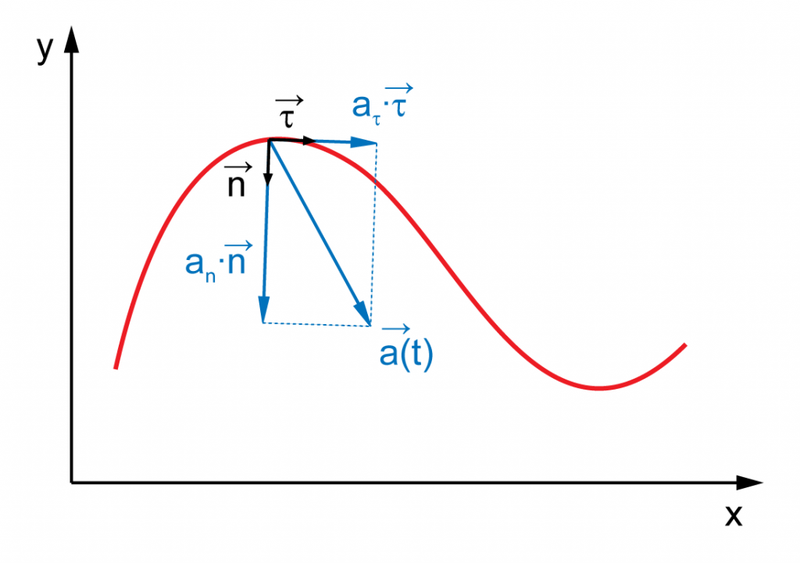
Ускорение показывает, как быстро изменяется скорость тела. В случае прямолинейного движения, направления векторов скорости и ускорения совпадают. В случае же криволинейного движения, вектор ускорения можно разложить на две составляющие: ускорение тангенциальное, и ускорение нормальное.
Тангенциальное ускорение показывает, как быстро изменяется скорость тела по модулю и направлено по касательной к траектории
Нормальное же ускорение характеризует быстроту изменения скорости по направлению. Векторы нормального и тангенциального ускорения взаимно перпендикулярны, а вектор нормального ускорения направлен к центру окружности, по которой движется точка.
Здесь R – радиус окружности, по которой движется тело.
Закон равноускоренного движения
Рассмотрим далее закон равноускоренного движения, то есть движения с постоянным ускорением. Будем рассматривать простейший случай, когда тело движется вдоль оси x.
Здесь — x нулевое- начальная координата. v нулевое — начальная скорость. Продифференцируем по времени, и получим скорость
Производная по скорости от времени даст значение ускорения a, которое является константой.
Пример решения задачи
Теперь, когда мы рассмотрели физические основы кинематики, пора закрепить знания на практике и решить какую-нибудь задачу. Причем, чем быстрее, тем лучше.
Кстати! Для всех наших читателей сейчас действует скидка 10% на любой вид работы.
Решим такую задачу: точка движется по окружности радиусом 4 метра. Закон ее движения выражается уравнением S=A+Bt^2. А=8м, В=-2м/с^2. В какой момент времени нормальное ускорение точки равно 9 м/с^2? Найти скорость, тангенциальное и полное ускорение точки для этого момента времени.
Решение: мы знаем, что для того, чтобы найти скорость нужно взять первую производную по времени от закона движения, а нормальное ускорение равняется частному квадрата скорости и радиуса окружности, по которой точка движется. Вооружившись этими знаниями, найдем искомые величины.
Нужна помощь в решении задач? Профессиональный студенческий сервис готов оказать ее.
Источник
Тема 1.7. Ускорение точки и его виды
§1. Вектор ускорения точки
Ускорение — векторная физическая величина, характеризующая быстроту изменения скорости. Оно показывает, на какую величину изменяется скорость тела за единицу времени.
В СИ единицей ускорения является метр на секунду в квадрате .
Пусть в некоторый момент времени t движущаяся точка находится в положении М и имеет скорость v, а в момент t 1 приходит в положение M 1 и имеет скорость v 1 (рис. 1).
Рис.1. Движение точки М с ускорением
Тогда за промежуток времени ∆t=t 1-t скорость точки получает приращение . Для построения вектора отложим от точки М вектор, равный v 1, и построим параллелограмм, в котором диагональю будет
, a одной из сторон . Тогда, очевидно, вторая сторона и будет изображать вектор . Заметим, что вектор всегда направлен в сторону вогнутости траектории.
Отношение приращения вектора скорости к соответствующему промежутку времени ∆t определяет вектор среднего ускорения точки за этот промежуток времени:
Вектор среднего ускорения имеет то же направление, что и вектор , т.е. направлен в сторону вогнутости траектории.
Ускорение точки равно нулю лишь тогда, когда скорость точки v постоянна как по величине, так и по направлению: это соответствует только прямолинейному и равномерному движению.
Найдем, как располагается вектор по отношению к траектории точки. При прямолинейном движении вектор направлен вдоль прямой, по которой движется точка.
При прямолинейном движении с возрастающей по модулю скоростью (рис. 2, а) векторы и сонаправлены () и проекция ускорения на направление движения положительна.
При прямолинейном движении с убывающей по модулю скоростью (рис. 2, б) направления векторов и противоположны () и проекция ускорения на направление движения отрицательна.
Источник
Вектор скорости и ускорения материальной точки и их модули. Пример решения задач.
В очередной раз меня попросили решить пару задачек по физике, и я вдруг обнаружил, что не могу решить их с ходу. Немного погуглив, я обнаружил, что сайты в топе выдачи содержат сканы одного и того же учебника и не описывают конкретных примеров решений задачи о том, как найти вектор скорости и ускорения материальной точки. По-этому я решил поделиться с миром примером своего решения.
Траектория движения материальной точки через радиус-вектор
Подзабыв этот раздел математики, в моей памяти уравнения движения материальной точки всегда представлялись при помощи знакомой всем нам зависимости y(x) , и взглянув на текст задачи, я немного опешил когда увидел векторы. Оказалось, что существует представление траектории материальной точки при помощи радиус-вектора – вектора, задающего положение точки в пространстве относительно некоторой заранее фиксированной точки, называемой началом координат.
Формула траектория движения материальной точки помимо радиус-вектора описывается так же ортами – единичными векторами i, j , k в нашем случае совпадающими с осями системы координат. И, наконец, рассмотрим пример уравнения траектории материальной точки (в двумерном пространстве):
Что интересного в данном примере? Траектория движения точки задается синусами и косинусами, как вы думаете, как будет выглядеть график в всем нам знакомом представлении y(x) ? “Наверное какой-то жуткий”, подумали вы, но все не так сложно как кажется! Попробуем построить траекторию движения материальной точки y(x), если она движется по представленному выше закону:
Здесь я заметил квадрат косинуса, если вы в каком-нибудь примере видите квадрат синуса или косинуса, это значит что нужно применять основное тригонометрическое тождество, что я и сделал (вторая формула) и преобразовал формулу координаты y, чтобы вместо синуса подставить в нее формулу изменения x:
В итоге жуткий закон движения точки оказался обычной параболой, ветви которой направлены вниз. Надеюсь, вы поняли примерный алгоритм построения зависимости y(x) из представления движения через радиус-вектор. Теперь перейдем к нашему главному вопросу: как же найти вектор скорости и ускорения материальной точки, а так же их модули.
Вектор скорости материальной точки
Всем известно, что скорость материальной точки – это величина пройденного пути точкой за единицу времени, то есть производная от формулы закона движения. Чтобы найти вектор скорости нужно взять производную по времени. Давайте рассмотрим конкретный пример нахождения вектора скорости.
Пример нахождения вектора скорости
Имеем закон перемещения материальной точки:
Теперь нужно взять производную от этого многочлена, если вы забыли как это делается, то вот вам таблица производных различных функций. В итоге вектор скорости будет иметь следующий вид:
Все оказалось проще, чем вы думали, теперь найдем вектор ускорения материальной точки по тому же самому закону, представленному выше.
Как найти вектор ускорения материальной точки
Вектор ускорения точки это векторная величина, характеризующая изменение с течением времени модуля и направления скорости точки. Чтобы найти вектор ускорения материальной точки в нашем примере, нужно взять производную, но уже от формулы вектора скорости, представленной чуть выше:
Модуль вектора скорости точки
Теперь найдем модуль вектора скорости материальной точки. Как вы знаете из 9-го класса, модуль вектора – это его длина, в прямоугольных декартовых координатах равна квадратному корню из суммы квадратов его координат. И откуда же из полученного нами выше вектора скорости взять его координаты спросите вы? Все очень просто:
Теперь достаточно только подставить время, указанное в задаче и получить конкретное числовое значение.
Модуль вектора ускорения
Как вы поняли из написанного выше (и из 9-го класса), нахождение модуля вектора ускорения происходит тем же образом, что и модуля вектора скорости: извлекаем корень квадратный из суммы квадратов координат вектора, все просто! Ну и вот вам, конечно же, пример:
Как вы видите, ускорение материальной точки по заданному выше закону не зависит от времени и имеет постоянную величину и направление.
Еще примеры решений задачи нахождения вектора скорости и ускорения
А вот тут вы можете найти примеры решения и других задач по физике на тему “механика твердых тел”. А для тех, кто не совсем понял как найти вектор скорости и ускорения, вот вам еще парочка примеров из сети без всяких лишних объяснений, надеюсь, они вам помогут.
Если у вас возникли какие-нибудь вопросы, вы можете задать их в комментариях.
Источник
Школьный курс физики содержит раздел «кинематика». Большинство задач этого раздела можно решить, рассматривая движение вдоль одной оси — одномерное движение. Его еще называют прямолинейным движением.
Для некоторых задач нужно рассматривать движение на плоскости – двумерный случай.
Вообще, движение тела может происходить:
- вдоль оси – одномерный случай, ось часто именуют, как «Ox»;
- на плоскости;
- в трехмерном пространстве;
Здесь рассмотрим одномерный случай движения — движение тел вдоль оси.
Параметры, описывающие движение
Чтобы описать движение, используют:
- перемещение тела;
- время, в течение которого движение происходило;
- скорость тела;
- начальные и конечные координаты тела;
- траекторию тела;
Траектория – линия, вдоль которой двигалось тело.
Траектория – скаляр, в СИ длину траектории измеряют в метрах.
Для криволинейного движения траектория будет отрезком кривой.
Если движение прямолинейное, траектория – отрезок прямой линии.
Перемещение тела – это вектор. Он соединяет точки, в которых тело находилось в начале и конце движения, направлен из начальной точки в конечную.
Модуль этого вектора – его длину, в СИ измеряют в метрах.
Может ли перемещение тела равняться нулю, при том, что траектория имеет какую-либо протяженность?
Да, такое может быть. Когда тело движется так, что в конце движения оно вернется в начальную точку, в которой находилось перед началом движения.
Если в завершении движения тело окажется на каком-то расстоянии от начальной точки, длина вектора перемещения будет положительной.
Примечания:
- Модуль (длина) вектора не бывает отрицательным, он либо положительный, либо нулевой.
- Когда тело движется по прямой и не меняет направление, длина траектории совпадает с длиной (модулем) перемещения.
Уравнение движения — описывает характер движения.
Оно содержит:
- время движения,
- начальную и конечную координаты тела и
- его скорость.
Вместо координат тела уравнение движения может содержать перемещение.
Примечания:
- Координаты тела, время движения и траектория – это скалярные величины.
- А скорость тела, его ускорение и перемещение – это векторы.
- Когда движение равномерное, скорость тела не меняется.
- Скорость отвечает на вопрос: как быстро изменяется координата (или путь, перемещение).
Описанные параметры применяют и для равномерного и для неравномерного движения.
Прямолинейное движение вдоль оси
Рассмотрим движение по прямой, когда скорость тела не меняется. Это — равномерное прямолинейное движение.
На рисунке 1 представлено движение тела вдоль оси, назовем ее для определенности Ox:

Рис. 1. Перемещение – это разница между конечной и начальной координатами тела
Ось «Ox» на рисунке 1 обозначена большим символом «X».
Точка, в которой тело находилось в начале движения (x_{0} left( text{м} right)) — начальная координата тела;
В эту точку тело переместилось к концу движения (x left( text{м} right)) — конечная координата тела;
Расстояние между двумя точками (S left( text{м} right)) – это перемещение тела. Перемещение – это вектор.
Формула перемещения для одномерного случая
Для движения по оси (одномерный случай), длину перемещения находят так:
[ large boxed { S = left| x — x_{0} right| }]
Знак модуля нужен для того, чтобы длина перемещения оставалась положительной, даже, если движение происходит влево по оси, т. е. против направления оси Ox.
Сравним два случая движения тел. Первый – в положительном направлении оси Ox (рис 2а), второй – в направлении, противоположном оси (рис 2б).

Рис. 2. Перемещение вправо по оси – а) и влево по оси – б)
Чтобы найти длину вектора перемещения при движении в положительном направлении оси (рис. 2а), модуль раскрываем так:
[ S = left| x — x_{0} right| = x — x_{0} ]
Для движения в отрицательном направлении оси (рис. 2б), длина вектора перемещения выражается так:
[ S = left| x — x_{0} right| = — left( x — x_{0} right) = x_{0} — x ]
И в первом, и во втором случае, длина (модуль) вектора перемещения окажется положительной.
Скорость равномерного движения
В учебниках физики равномерному движению дают такое определение:
Движение равномерное, когда тело за одинаковые интервалы времени проходит равные расстояния.
Упростим формулировку:
Если каждую секунду тело проходит одинаковые расстояния – оно движется равномерно.
Слово «равномерное» состоит из двух частей.
Если разбить его на части, получим
«равно» — одинаковый, равный,
«мерное» — отмерять.
Или, другими словами: каждую секунду отмеряем одинаковые расстояния (рис. 2).

Рис. 3. Если тело проходит равные пути за одинаковые кусочки времени, движение будет равномерным
Для равномерного движения тела его
- перемещение,
- время движения и
- скорость,
связаны соотношением:
[ left|vec{S} right| = left|vec{v} right|cdot t ]
Эта формула называется уравнением движения. Или, развернуто: «уравнение равномерного прямолинейного движения».
Где ( left|vec{S} right| ) — длина (модуль) вектора перемещения и, (left|vec{v} right|) — длина (модуль) вектора скорости.
Уравнение движения можно записать проще:
[ large boxed { S = v cdot t }]
(S left( text{м} right)) – расстояние, пройденное телом (перемещение).
(t left( c right)) – промежуток времени, в течение которого тело двигалось.
(v left( frac{text{м}}{c} right)) – скорость, с которой двигалось тело.
Разделив обе части уравнения ( S = v cdot t ) на интервал времени ( t ), получим выражение для скорости тела:
[ large boxed { frac{S}{t} = v }]
График уравнения равномерного движения
Вспомним, что перемещение является разностью конечных и начальных координат тела
( S = left| x — x_{0} right| )
Воспользуемся тем, что при движении вдоль положительного направления оси модуль можно раскрыть так:
( left| x — x_{0} right| = x — x_{0} )
Тогда уравнение движения перепишем так:
[ large boxed { x — x_{0} = v cdot t }]
Прибавим к обеим частям уравнения величину ( x_{0} ). Получим такую запись
[ large x = v cdot t + x_{0}]
Это уравнение задает на плоскости tOx линию. Ее график на осях «x» и «t» — это прямая линия.
Вспомним, что для прямой линии в математике применяют такой вид записи:
( y = k cdot x + b)
Сравним два уравнения:
[ begin{cases} x = vcdot t + x_{0}\ y = kcdot x + b end{cases} ]
Видно, что число ( x_{0}) – начальная координата тела, выполняет роль коэффициента (b).
А скорость тела ( v) – играет роль углового коэффициента (k).
Сравним графики линий (рис. 4), описанных соотношениями ( y = k cdot x + b) и ( x = v cdot t + x_{0})

Рис.4. При равномерном движении тела координата изменяется по линейному закону
Видно, что линия на рисунке 4а, располагается и слева и справа от вертикальной оси.
Линия же, описывающая движение тела, представленная на рисунке 4б, располагается только лишь в правой полуплоскости. Это не с проста. На горизонтальной оси рисунка 4б отложено время, а в левой полуплоскости время будет отрицательным. При решении задач физики мы считаем, что в начальный момент задачи время равно нулю. Поэтому, область отрицательного времени в физике нас не интересует.
Рассмотрим теперь на графике равномерное движение двух тел, обладающих разными скоростями (рис. 5). Движение тела 1 на рисунке описывает синяя линия, а тела 2 – красная.

Рис.5. Равномерное движение двух тел, обладающих разными скоростями. Скорость тела 1 (синий цвет) больше скорости тела 2 (линия красного цвета).
Два тела стартуют из точки ( x_{0}) и двигаются равномерно воль оси Ox. За промежуток времени ( Delta t) тело 1, проходит больший путь, чем тело 2.
Примечание: Чем сильнее на графике x(t) прямая линия прижимается к вертикали, тем больше скорость, с которой движется тело!
Как отмечалось выше, тело может двигаться не только в положительном направлении вдоль оси, но и в отрицательном направлении.
На следующем рисунке представлены случаи движения тела в положительном (рис. 6а) и, в отрицательном (рис. 6б) направлениях оси Ox.
Когда скорость направлена по оси (рис. 6а) — координата «x» увеличивается,
а когда против оси (рис. 6б) — координата «x» уменьшается.

Перемещение тела в положительном направлении оси – а) и в отрицательном направлении по оси Ox – б)
На рисунке рядом с прямыми x(t) приведены уравнения движения. Когда скорость направлена против оси (рис. 6б), перед ней записывают знак «минус».
Угол (alpha) на рисунке связан со знаком скорости. Если скорость направлена по оси (рис. 6а), то угол будет острым. А если скорость направлена против оси (рис. 6б) – угол тупой.
Примечание: Скорость – это вектор. Когда вектор направлен против оси, его проекция на эту ось будет отрицательной. Читайте тут о проекциях векторов. Длина любого вектора – это положительная величина.
Как по графику перемещения определить скорость
Пользуясь графиком функций S(t), или x(t) равномерного движения можно определить скорость, с которой движется тело.
Примечания:
- График S(t) называют так: «зависимость перемещения S от времени t», или кратко — график перемещения от времени.
- А график x(t) — так: «зависимость координаты x от времени t», или кратко — график координат от времени.
Скорость находим за четыре шага (рис. 7):
- Выбираем две точки на линии, описывающей движение и определяем их координаты;
- Находим разность вертикальных координат;
- После находим разность координат по горизонтали;
- Делим «вертикаль» на «горизонталь»
Полученное число и будет скоростью тела.
Примечания:
- Когда просят найти скорость, обычно имеют ввиду, что нужно найти модуль вектора скорости.
- Скорость в системе СИ измеряют в метрах, деленных на секунду.
Обращаем внимание на то, в каких единицах на осях измерены расстояние S и время t. Если нужно, переводим расстояние в метры, а время — в секунды, чтобы получить скорость в правильных единицах измерения.

Рис.7. Две точки 1 и 2 выбраны для того, чтобы по графику x(t) найти скорость равномерного прямолинейного движения тела
Рассмотрим рисунок 7.
На рисунке первая точка имеет координаты ( left( t_{1} ; x_{1} right) ),
координаты второй точки: ( left( t_{2} ; x_{2} right) ).
Разницы между координатами находим, руководствуясь принципом («конечная» — «начальная») по формулам
( Delta t = t_{2} — t_{1} )
( Delta x = x_{2} — x_{1} )
Скорость вычислим из соотношения
[ v = frac{Delta x}{Delta t}]
Читайте далее о том, как переводить скорость из километров в час в метры в секунду и о равнопеременном движении
