
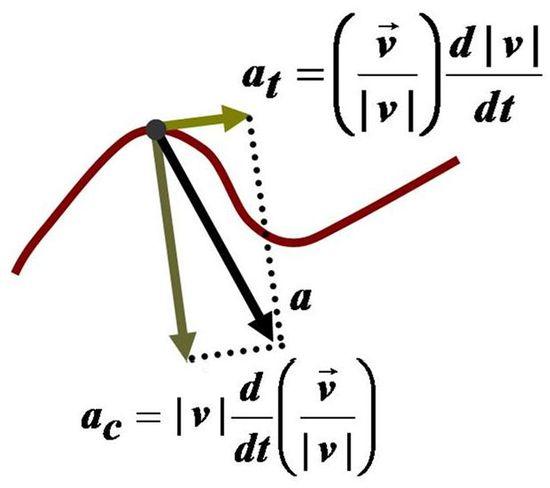
Разложение ускорения  на тангенциальное
на тангенциальное  и нормальное
и нормальное  (
( — единичный касательный вектор)
— единичный касательный вектор)
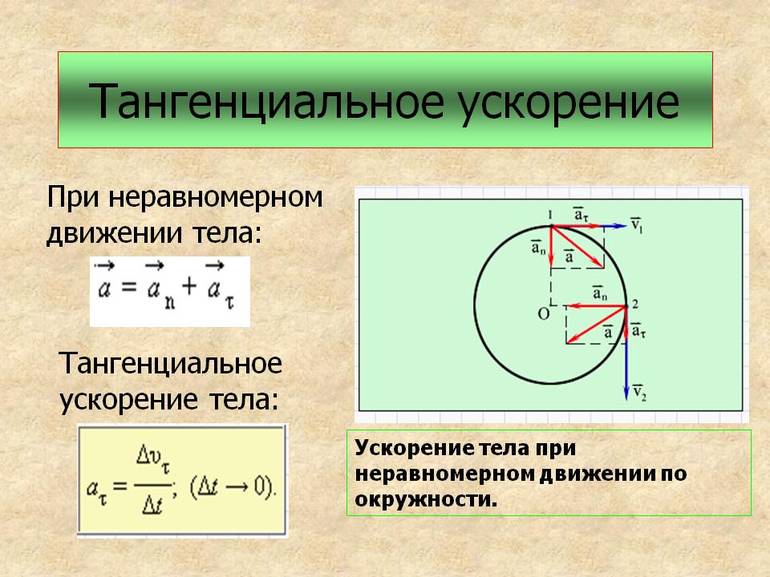
Тангенциа́льное ускоре́ние — компонента ускорения, направленная по касательной к траектории движения. Характеризует изменение модуля скорости, в отличие от нормальной компоненты, характеризующей изменение направления скорости.
Определяется как производная модуля скорости по времени, умноженная на единичный вектор  вдоль скорости. Обозначается символом, выбранным для ускорения, с добавлением индекса тангенциальной компоненты: или
вдоль скорости. Обозначается символом, выбранным для ускорения, с добавлением индекса тангенциальной компоненты: или  ,
,  ,
,  . Измеряется в м/с2 (в системе СИ).
. Измеряется в м/с2 (в системе СИ).
Величина  равна проекции полного ускорения
равна проекции полного ускорения  на касательную в данной точке кривой, что соответствует коэффициенту разложения по сопутствующему базису.
на касательную в данной точке кривой, что соответствует коэффициенту разложения по сопутствующему базису.
Общая формула[править | править код]
Величину тангенциального ускорения как проекцию вектора ускорения на касательную к траектории можно выразить так:
 ,
,

где  — путевая скорость вдоль траектории, совпадающая с абсолютной величиной мгновенной скорости в данный момент.
— путевая скорость вдоль траектории, совпадающая с абсолютной величиной мгновенной скорости в данный момент.
Если использовать для единичного касательного вектора обозначение , то можно записать тангенциальное ускорение в векторном виде:
- .

Тангенциальное ускорение параллельно вектору скорости  при ускоренном движении (положительная производная) и антипараллельно при замедленном (отрицательная производная).
при ускоренном движении (положительная производная) и антипараллельно при замедленном (отрицательная производная).
Происхождение формулы[править | править код]
Разложение полного ускорения на тангенциальную и нормальную компоненты осуществляется посредством дифференцирования по времени вектора скорости, представленного в виде  через единичный вектор касательной :
через единичный вектор касательной :
- .

Первое слагаемое — тангенциальное ускорение  , а второе — нормальное ускорение
, а второе — нормальное ускорение  (
( и
и  — радиус кривизны и единичный вектор нормали к траектории в рассматриваемой точке).
— радиус кривизны и единичный вектор нормали к траектории в рассматриваемой точке).
Некоторые примеры[править | править код]
- Пример 1
Скорость камня, сброшенного с высоты с начальной скоростью  , направленной горизонтально, до падения на землю будет изменяться как
, направленной горизонтально, до падения на землю будет изменяться как  , где
, где  — ускорение свободного падения. Модуль скорости составит
— ускорение свободного падения. Модуль скорости составит  , а значит, тангенциальное ускорение по величине равняется
, а значит, тангенциальное ускорение по величине равняется  . В начальный момент оно равно нулю, а при больших
. В начальный момент оно равно нулю, а при больших  стремится к . Можно записать тангенциальное ускорение и как вектор:
стремится к . Можно записать тангенциальное ускорение и как вектор:
- .

В этих выражениях  ,
,  — единичные векторы в декартовых координатах.
— единичные векторы в декартовых координатах.
- Пример 2
Пусть радиус-вектор тела зависит от времени по закону  .
.
В таком случае скорость тела найдётся как  . Соответственно, её модуль равен
. Соответственно, её модуль равен  и является постоянной величиной. В результате получается, что тангенциальное ускорение — ноль:
и является постоянной величиной. В результате получается, что тангенциальное ускорение — ноль:
- .

Рассмотренная зависимость  описывает равномерное движение по окружности радиусом
описывает равномерное движение по окружности радиусом  .
.
Равнопеременность[править | править код]
Движение тела с постоянным по величине тангенциальным ускорением называется равнопеременным. Слова «равнопеременное» ( const) и «равноускоренное» (
const) и «равноускоренное» ( const) не синонимичны. Взаимозаменяемыми данные термины становятся только применительно к прямолинейному движению. Тем не менее возможны определённые аналогии при рассмотрении обоих названных типов движения.
const) не синонимичны. Взаимозаменяемыми данные термины становятся только применительно к прямолинейному движению. Тем не менее возможны определённые аналогии при рассмотрении обоих названных типов движения.
Тангенциальное ускорение – определение, формула и измерение
Общие сведения
Первая лекция для студентов, изучающих кинематику, начинается с рассмотрения тангенциального ускорения, характеризуемого произвольным движением. По сути, рассматривается неравномерное прямолинейное движение общего вида. Кинематика входит в механику и изучает перемещение объектов без учёта сил, вызвавших их движение. Под перемещением понимают изменение положения в пространстве по отношению к другому физическому телу, которое и считается точкой отсчёта. Если изменение положения связать с координатами и временем, то образуется система отсчёта. С её помощью можно определить положение объекта в любой момент.
В кинематике любые процессы принято рассматривать, приняв тело за материальную точку. То есть его размерами и формой пренебрегают. При изменении за какой-то промежуток времени точка проходит путь, описывающийся линией — траекторией. Она является скалярной величиной, а само перемещение — векторной. Движение материальной точки может происходить с разной скоростью и ускорением. Быстроту движения разделяют на среднюю и мгновенную. Вторая определяется как предел, к которому стремится скорость на бесконечно малом временном интервале: v = Δs / Δt (Δt → 0).
Перемещение может происходить с ускорением. Это физическая величина, определяющая изменение быстроты перемещения. Иными словами, показывает изменение положения за единицу времени. Измеряется она в метрах на секунду в квадрате. В кинематике существует три вида ускорения:
- Тангенциальное — направленное вдоль касательного пути точки в определённый момент. Из-за происхождения слова его часто называют касательным.
- Нормальное — совпадающее с нормалью траектории изменения положения.
- Полное — определяющееся суммой тангенциального и нормального ускорений.
Но также используется понятие «вектор среднего ускорения тела». Определяется он как приращение вектора скорости за промежуток времени: aср = Δv / Δt. При этом он будет совпадать по направлению с вектором скорости, то есть направлен в сторону вогнутости траектории.
Угловое ускорение
Если имеется какая-то точка, находящаяся на вращающемся теле, то скорость её направлена по касательной. Когда движение равномерное, то линейная скорость связана с угловой равенством: v = w * r. А вот ускорение тела будет направлено по радиусу к центру окружности, причём модуль вычисляется как a = v / r либо если это точка на вращающемся теле: a = w2 * r.
В момент, когда тело поворачивается за небольшой промежуток времени на угол дельта фи, угловую скорость можно связать с условием поворота через формулу: w = Δ φ / Δ t. Если тело вращается равномерно, то промежуток времени может быть любым. В ином случае эта величина будет равна мгновенной угловой скорости.
Можно представить, что материальная точка движется неравномерно, то есть изменяется угловая скорость тела. Линейная скорость не будет представлять собой постоянную величину, в отличие от равномерного перемещения. Угол поворота равняется: w = v / r. Так как скорость не может быть константой, то отсюда следует, что и угловая скорость не будет постоянной величиной. Её изменение обозначают Δw. Она равняется разности конечной угловой скорости и начальной: Δw = wк — wн.
Изменение угловой скорости можно разделить на промежуток времени, за который оно поменяло значение: (wк — wн) / Δt. По сути, получается ускорение. Обозначается характеристика буквой эпсилон E и называется угловым ускорением. Измеряется характеристика в радианах на секунду в квадрате. Её смысл заключается в описании физической величины через отношение изменения угловой скорости тела за небольшой промежуток времени к длительности этого промежутка.
Пусть есть дуга окружности с центром. В начальный момент времени у тела есть скорость, направленная по касательной к траектории v0. Через некоторое время точка переместится по окружности на небольшое расстояние. Так как движение неравномерное, модуль скорости изменится v ≠ v0. Для того чтобы найти ускорение тела, нужно воспользоваться следующей формулой: a = Δv / Δt, при этом Δv = v — v0.
Чтобы найти эту разность, нужно воспользоваться правилом треугольника. Для этого следует перенести вектор V0 к V и соединить их линией. Радиус от центра к материальной точке можно обозначить R. Дельта V можно представить, как сумму взаимно перпендикулярных векторов. Один из них будет направленных тангенциально к радиусу, в физике обозначают его Δ Vτ, а другой радиально Δ Vr. В итоге: ΔV = Δ Vτ + Δ Vr.
Вывод формулы

Для доказательства формулы необходимо рассмотреть плоскую систему координат, в которой материальная точка изменяет своё положение по криволинейной траектории. В начальный момент её скорость будет равняться V0. Через некоторое время она изменится и станет V. На графике в плоском измерении это можно представить в виде синусоиды. В определённый момент времени скорость превышает начальную: V > V0. На схеме вектор нулевой скорости направлен из точки t0 вверх по касательной, а вектор V с нижней точки синусоиды параллельно оси ординаты.
Исходя из графика, можно сделать два вывода:
- Через промежуток времени Δt скорость изменяется как по направлению, так и по модулю: Δt = t — t0.
- Вектор изменения скорости, определяемый по правилу треугольника, будет равняться разности существующей скорости на данный момент и начальной: Δv = v — v0.
Для того чтобы построить вектор изменения Δv, нужно из конечной точки отрезка V0 провести линию к рассматриваемой точки, характеризующейся во времени скоростью V. Вершины полученного треугольника можно обозначить буквами ABD. Из верхнего угла B на сторону AD можно опустить медиану. Точка пересечения со стороной пусть будет C. Получается, что вектор Δv можно разложить на две составляющие — отрезки BC и СD. Причём медиана равняется Δvn, а изменение по оси ординаты Δvt.
Для разложения необходимо использовать вектор АС, длина которого совпадает с Vo по модулю: |AC| = |AB| = V0. Так как Δvn — результирующий вектор, то его можно вычислить через сумму: Δv = Δvn + Δvt. Причём первый член в равенстве характеризует изменение быстроты за промежуток времени по направлению, а второй — по модулю. Исходя из того, что t не равняется нулю, на него можно разделить левую и правую часть равенства: Δv / Δt = Δvn / Δt + Δvt / Δt. Если дельта-времени стремится к нулю, то формулу можно переписать в виде: lim Δv / Δt = lim Δvn / Δt + lim Δvt / Δt.
Учитывая связь между ускорениями и то, что полное значение состоит из суммы изменения быстроты движения по модулю и направлению, можно утверждать о верности формулы: a = at + an. Так как направление векторов ускорения и скорости всегда совпадают, то последний можно представить, как параметр, состоящий из двух взаимно перпендикулярных компонент:
- at — тангенциальной составляющей, совпадающей с отрезком V;
- an — перпендикулярным по отношению расположения V вектором.
Используя теорему Пифагора, можно сказать, что модуль полного ускорения равняется корню квадратному из суммы квадратов тангенциального и нормального ускорения: a = √at 2 + an 2 .
Решение простых примеров
В школьном курсе на уроках физики учащимся для закрепления материала предлагается решить определённый тип задач, используя определение тангенциального ускорения. Это типовые примеры, объясняющие суть характеристики и её применение в реальной практике. Вот некоторые из них.
- Вычислить все ускорения точки, лежащей на окружности, через десять секунд после воздействия на диск вращателя. При этом учесть, что радиус окружности составит 20 см, а угол между валом и радиус вектором тела соответствует закону: j =3-t+0.2t 3 . Для решения примера необходимо использовать формулы для нахождения угловой скорости и ускорения. Подставив заданные значения, можно получить: w = d φ / dt = -1 + 0,2 * 3t 2 и e = dw / dt = 0,6 * 2t. Применив формулу связи, легко найти ускорение: at = R * E * (0,6 * 2t) = 1,2 * Rt = 24 м 2 /с. Подставив в формулу нормального ускорения значения, можно вычислить и его an = V 2 / R = R * (0,6 * 10 2 — 1) 2 / 0,2 = 696 м/с 2 . Отсюда полное ускорение будет равняться: a = √ 24 2 + 696 2 = 697 м/с 2 .
- Материальное тело перемещается по окружности, имеющей радиус 20 см. При этом тангенциальное ускорение равняется 5 см на секунду в квадрате. Определить, сколько понадобится времени, чтобы ускорения сравнялись и нормальное стало больше тангенциального в два раза. Исходя из условия, можно утверждать, что движение является равноускоренным. Поэтому можно применить формулы: an = V2 / t; at = V / t. Отсюда: t = V / at, а V = √an * R. Подставив второе выражение в первое, получится: t = (√an * R) / at. При равенстве ускорений an = at, будет верной запись: t = √R / at = √20 / 5 = 2 с. Для второго случая an = 2at, поэтому: t = (√2 * 20) / 5 = 2,8 c.
Но не всегда решаемые задания можно решить, обойдясь одной формулой. При этом значения тех или иных величин могут быть довольно сложными для проведения вычислений. В таких случаях есть резон использовать так называемые онлайн-калькуляторы. Это специализированные сайты, выполняющие подсчёт в автоматическом режиме. Из таких сервисов можно выделить: сalc, widgety, webmath. Указанные интернет-решители работают на русском языке, так что вопросов, как с их помощью выполнять расчёты, возникнуть не должно.
Сложная задача
Пусть имеется физическое тело, которое движется, замедляясь по окружности радиусом R так, что в каждый момент времени её тангенциальное и нормальное убыстрение равны друг другу по модулю. Необходимо найти зависимость скорости и полного ускорения от времени и пройденного пути. В начальный момент скорость равняется V0.
Согласно условию, тангенциальное ускорение будет отрицательным, так как точка движется, замедляясь. Для понимания задачи можно изобразить схему движения. Для этого необходимо нарисовать окружность и указать на ней вектор начальной скорости, тангенциального и нормального ускорения. Изобразить вектор полного ускорения как сумму векторов.
Нормальное ускорение можно выразить через скорость и радиус: an = V 2 / R. Затем необходимо записать формулу для тангенциального ускорения: at = dV / dt. Так как они равны, то справедливым будет равенство: V 2 / R = dV / dt. Анализируя уравнение, можно сделать вывод, что так как скорость и радиус положительный, то слева будет стоять величина со знаком плюс. Но, с другой стороны, со временем скорость убывает, поэтому с правой стороны нужно поставить знак минус: V 2 / R = – dV / dt.
Полученное уравнение является дифференциальным и показывает зависимость скорости от времени. Равенство можно преобразовать, умножив на отношение dt / V 2 . В итоге должно получиться выражение: dV / V 2 = – dt / R. Это уравнение можно проинтегрировать. При этом пределами интеграла с левой стороны будет V0 и V, а с правой — 0 и t. Получился обыкновенный степенной интеграл, который будет равняться: 1 / V = dt / R.
Подставив пределы, можно получить равенство: (1 / V) — (1 / V0) = t / R. Из полученной формулы следует выразить скорость: V = (V0 * R) / (R + V0 * t). Поделив числитель и знаменатель на радиус, ответ примет вид: V (t) = V0 / (1 + (V0 * t / R)).
Теперь можно найти тангенциальное убыстрение, так как оно представляет производную от скорости. После взятия производной получится: at = dV / dt = – V02 / R (1 + V0 * t / R)2 = – V2 / R. Отсюда можно написать, что модуль полного ускорения будет равняться: a = √2 *|ar| = (√2 * V2) / R. Осталось найти путь. Он совпадает с длиной дуг и равняется интегралу модуля скорости от времени. После решения должно получиться равенство: S (t) = R * ln (1 + V0 * t / R). Задача решена.
Лекция №2. Элементы кинематики
1.4. Нормальное и тангенциальное ускорения при криволинейном движении
В общем случае при движении тела его скорость изменяется как по величине, так и по направлению. Для характеристики быстроты изменения скорости движения вводится понятие ускорения.
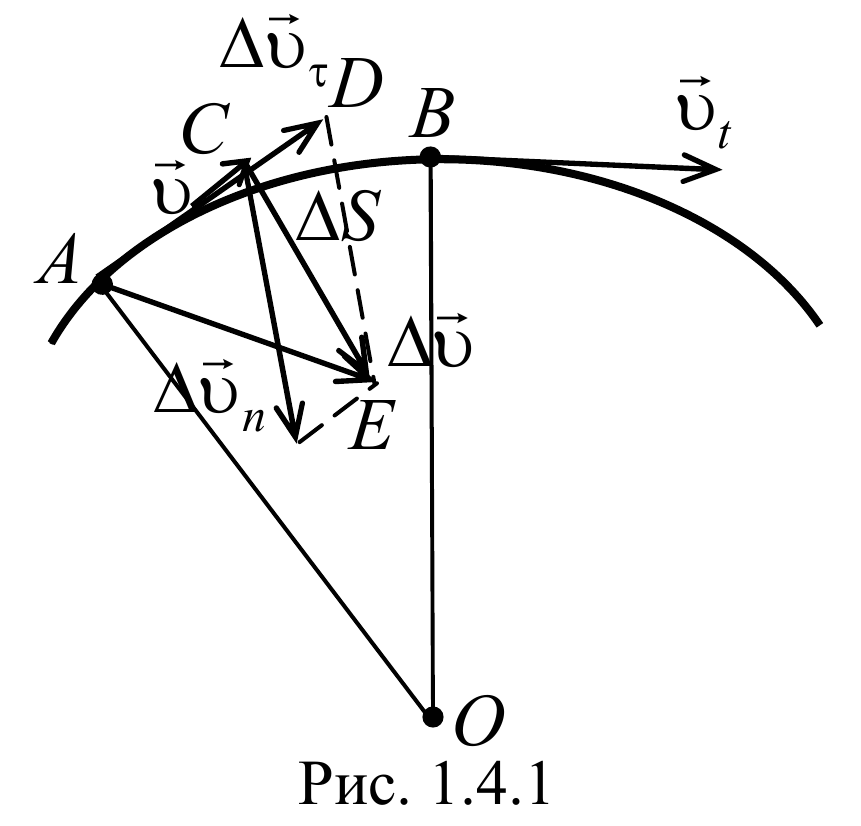
Рассмотрим плоское движение, т. е. такое, при котором все участки траектории точки лежат в одной плоскости. Пусть вектор υ задает скорость точки А , в момент времени t . За время Δt движущаяся точка перешла в положение В и приобрела скорость, отличную от υ как по модулю, так и направлению и равную υ1 = υ +Δ υ . Перенесем вектор υ1 в точку А и найдем Δ υ (рис.). Средним ускорением aср неравномерного движения в интервале времени от t до t+Δt называется векторная величина, равная отношению изменения скорости Δ υ к интервалу времени Δt :
Ускорение в данный момент времени (мгновенное ускорение) представляет собой предел, к которому стремится выражение (1.4.1) при Δt 0 , т. е.
Таким образом, ускорение есть векторная величина, равная первой производной скорости по времени.
Разложим вектор Δ υ на две составляющие. Для этого из точки А (рис. 1.4.1) по направлению скорости υ отложим вектор AD , по модулю равный υ1 . Очевидно, что вектор CD , равный Δ υτ , определяет изменение скорости по модулю за время Δt : Δυτ=υ1−υ . Вторая же составляющая Δυn вектора Δ υ характеризует изменение скорости за время Δt no направлению.
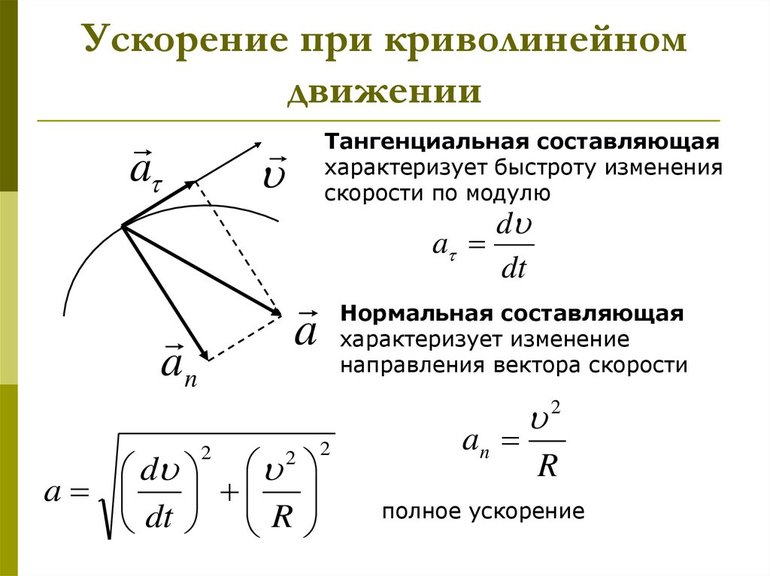
Тангенциальная составляющая ускорения
т.е. равна первой производной по времени от модуля скорости, определяя тем самым быстроту изменения скорости по модулю.
Определим вторую составляющую ускорения. Допустим, что точка B близка к точке A , поэтому Δs можно считать дугой окружности некоторого радиуса r , мало отличающейся от хорды AB . Тогда из подобия треугольников AOB и EAD следует Δυn/AB=υ1/r , но так как AB=υΔt , то Δυn/t=υυ1/r . В пределе Δt 0 , получим υ1 υ .
Поскольку υ1 υ , угол EAD стремится к нулю, а так как треугольник EAD равнобедренный, то угол АDE между υ и Δ υn стремится к прямому. Следовательно, при Δt 0 векторы υ и Δ υn оказываются взаимно перпендикулярными. Так как вектор скорости направлен по касательной к траектории, то вектор Δ υn , перпендикулярный вектору скорости, направлен к центру ее кривизны. Вторая составляющая ускорения, равная 
называется нормальной составляющей ускорения и направлена по нормали к траектории к центру ее кривизны. Поэтому эту составляющую ускорения называют также центростремительным ускорением.
Таким образом, полное ускорение тела a есть геометрическая сумма тангенциальной aτ и нормальной an составляющих
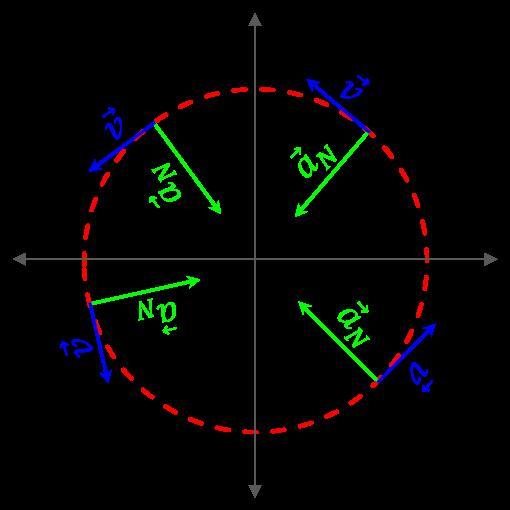
Тангенциальное ускорение равно первой производной по времени от модуля скорости и определяет быстроту изменения скорости по модулю, и направлено по касательной к траектории.
Нормальное ускорение определяет быстроту изменения скорости по направлению и направлено к центру кривизны траектории.
Векторы aτ и an взаимно перпендикулярны поэтому модуль полного ускорения равен 
1.5. Классификация движений материальной точки
В зависимости от тангенциальной и нормальной составляющих ускорения движение можно классифицировать следующим образом:
1) aτ=0,an=0 – прямолинейное равномерное движение.
2) aτ=const,an=0 – прямолинейное равнопеременное движение.

Так как $$vec <υ>= over dt>$$ , то, проинтегрировав полученное выражение в пределах от нуля до произвольного момента времени можно найти перемещение точки:  или
или 
3) aτ= ƒ(t), an=0 − прямолинейное движение с переменным ускорением.
4) aτ=0, an=const – При таком движении скорость точки не изменяется по модулю, так как тангенциальная составляющая равна нулю, а изменяется только по направлению.
5) aτ=const, an≠const − равнопеременное движение по окружности.
6) aτ=0, an≠0 − равномерное криволинейное движение.
7) aτ=const, an≠0 − криволинейное равнопеременное движение.
1.6. Кинематика абсолютно твердого тела
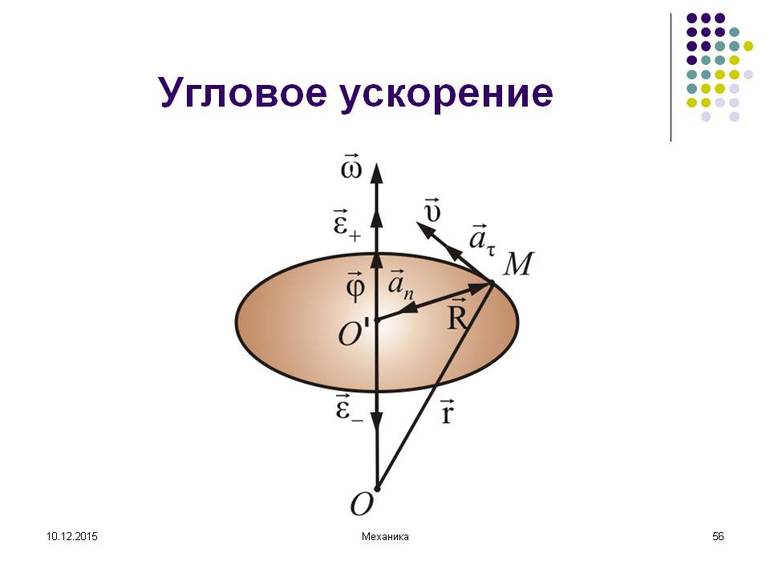
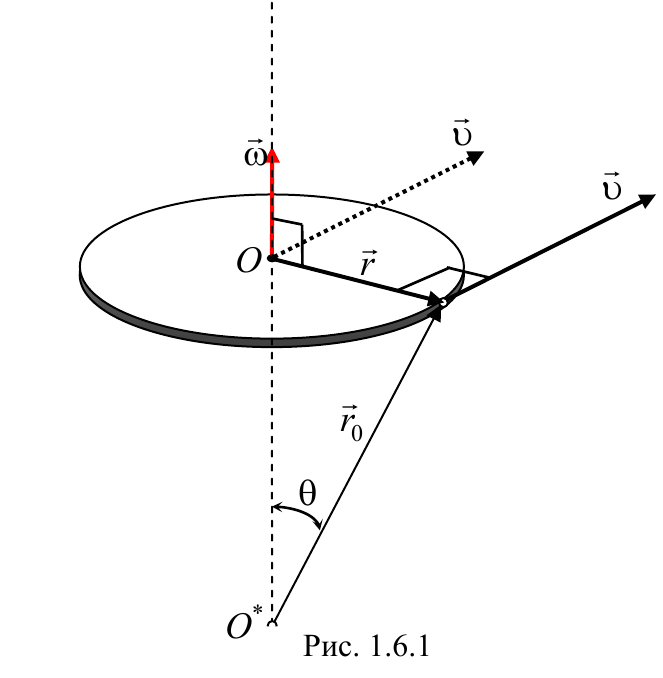
Вращательное движение − это движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой, называемой осью вращения. При вращательном движении скорости и ускорения различных точек тела неодинаковы. Поэтому в качестве общих кинематических характеристик движения тела при вращении вводятся угол поворота, угловая скорость и угловое ускорение тела. При вращении тела угол поворота изменяется со временем по некоторому закону ϕ = ϕ(t) , который называется уравнением вращательного движения тела.
Угловой скоростью тела называется вектор, численно равный первой производной по времени от угла поворота тела по времени и направленный вдоль оси вращения по правилу правого винта:
Вектор угловой скорости направлен по оси вращения, причем так, чтобы вращение, рассматриваемое с конца вектора угловой скорости, происходило против хода часовой стрелки (рис 1.6.1). Единицей угловой скорости является рад/с.
Скорость произвольной точки вращающегося тела называется линейной скоростью этой точки.
При равномерном вращении угловая скорость не изменяется со временем, то есть является постоянной величиной (ω = const) . Тогда
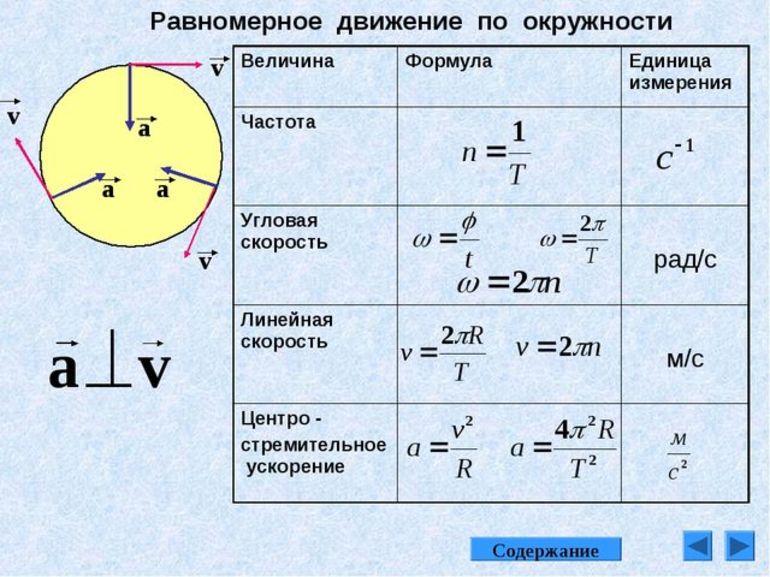
Равномерное вращение характеризуется периодом вращения и частотой вращения.
Период вращения − это время, за которое точка совершает один полный оборот, т. е. поворачивается на угол ϕ = 2π и на основании выражения (1.6.1) $$ = <2<π>over ω>$$
Частота вращения − это число полных оборотов, которое делает точка при равномерном вращении, за единицу времени: $$ = <1over T>= <ωover 2π>$$ , откуда ϕ = 2πn .
Для характеристики неравномерного вращения тела вводится понятие углового ускорения .
Угловым ускорением называется векторная величина, равная первой производной угловой скорости по времени:
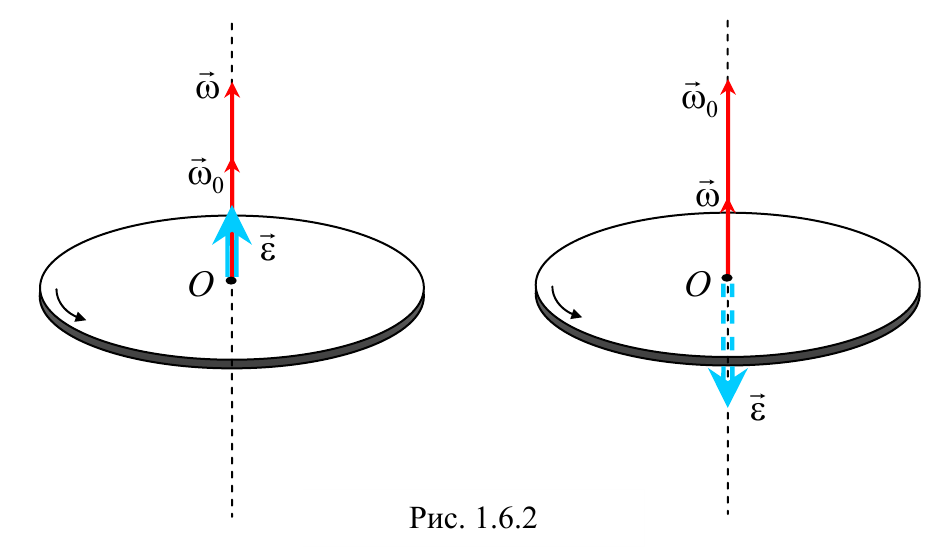
При ускоренном вращении вектор углового ускорения сонаправлен с вектором угловой скорости, а при замедленном − противоположен ему.
В случае равнопеременного движения точки по окружности (ε = const) угловая скорость определяется по формуле

Или в скалярном виде
Проинтегрировав выражение (1.6.1) можно получить формулу для угла поворота тела
Исключив из последнего уравнения t , получим 
где φ = 2πN , N − число полное число оборотов, совершенных телом.
В случае ε = ε(t) , угловая скорость и закон вращательного движения определяются следующими формулами 
1.7. Связь между линейными и угловыми характеристиками тела при его вращении
За время dt точка проходит по дуге окружности радиуса R путь dS = Rdφ . Поэтому $$ <υ>= = = <ωR>$$ .
Если угол поворота вращающегося тела представить в виде dφ = ω(t)dt и проинтегрировать в пределах от начального момента времени t1 до конечного момента времени t2 , то получится угол, на который совершила поворот тело за время: 
Тангенциальная и нормальная составляющие ускорения произвольной точки тела, вращающегося вокруг неподвижной оси, определяются формулами:

Полученные соотношения (1.7.1) можно записать в векторном виде. Для этого на оси вращения ОО* (рис. 1.6.1) тела выберем любую точку A и проведем из нее радиус-вектор r в точку M . Векторное произведение ω × r по модулю и направлению совпадает с вектором скорости υ точки M :

Следовательно, можно записать, что вектор скорости υ = ω × r , а вектор ускорения точки
Понятия о скорости, тангенциальном и нормальном ускорениях. Формулы
Чтобы уметь решать различные задачи на движение тел по физике, необходимо знать определения физических величин, а также формулы, с помощью которых они связаны. В этой статье будут рассмотрены вопросы, что такое тангенциальная скорость, что такое полное ускорение и какие компоненты его составляют.
Понятие о скорости
Двумя основными величинами кинематики перемещения тел в пространстве являются скорость и ускорение. Скорость описывает быстроту перемещения, поэтому математическая форма записи для нее имеет следующий вид:
 Вам будет интересно: Что такое туча? Определение
Вам будет интересно: Что такое туча? Определение
Здесь l¯ – является вектором перемещения. Иными словами, скорость – это производная по времени от пройденного пути.
Как известно, всякое тело движется по воображаемой линии, которая называется траекторией. Вектор скорости всегда направлен по касательной к этой траектории, в какой бы точке не находилось движущееся тело.
Существует несколько названий величины v¯, если рассматривать ее совместно с траекторией. Так, поскольку направлена она по касательной, то ее называют тангенциальной скоростью. Также о ней могут говорить, как о линейной физической величине в противоположность угловой скорости.
Вычисляется скорость в метрах в секунду в СИ, однако на практике часто пользуются километрами в час.
Понятие об ускорении

В отличие от скорости, которая характеризует быстроту прохождения телом траектории, ускорение – это величина, описывающая быстроту изменения скорости, что математически записывается так:
Как и скорость, ускорение – это векторная характеристика. Однако его направление не связано с вектором скорости. Оно определяется изменением направления v¯. Если в процессе движения скорость не изменяет своего вектора, тогда ускорение a¯ будет направлено вдоль той же линии, что и скорость. Такое ускорение называют тангенциальным. Если же скорость будет менять направление, сохраняя при этом абсолютное значение, то ускорение будет направлено к центру кривизны траектории. Оно называется нормальным.
Измеряется ускорение в м/с2. Например, известное всем ускорение свободного падения является тангенциальным при вертикальном подъеме или падении объекта. Его величина вблизи поверхности нашей планеты составляет 9,81 м/с2, то есть за каждую секунду падения скорость тела увеличивается на 9,81 м/с.
Причиной появления ускорения является не скорость, а сила. Если сила F оказывает действие на тело массой m, то она неминуемо создаст ускорение a, которое можно вычислить так:
Эта формула является прямым следствием из второго закона Ньютона.
Полное, нормальное и тангенциальное ускорения
Скорость и ускорение как физические величины были рассмотрены в предыдущих пунктах. Теперь мы подробнее изучим, какие компоненты составляют полное ускорение a¯.
Предположим, что тело движется со скоростью v¯ по криволинейной траектории. Тогда будет справедливо равенство:
Вектор u¯ имеет единичную длину и направлен вдоль касательной линии к траектории. Воспользовавшись таким представлением скорости v¯, получим равенство для полного ускорения:
a¯ = dv¯/dt = d(v*u¯)/dt = dv/dt*u¯ + v*du¯/dt.
Полученное в правом равенстве первое слагаемое называется тангенциальным ускорением. Скорость связана с ним тем фактом, что она количественно определяет изменение абсолютного значения величины v¯, не принимая во внимание ее направление.
Второе слагаемое – это нормальное ускорение. Оно количественно описывает изменение вектора скорости, не принимая во внимание изменение ее модуля.
Если обозначить как at и an тангенциальную и нормальную составляющие полного ускорения a, тогда модуль последнего можно вычислить по формуле:
Связь тангенциального ускорения и скорости
Соответствующую связь описывают кинематические выражения. Например, в случае движения по прямой с постоянным ускорением, которое является тангенциальным (нормальная составляющая равна нулю), справедливы выражения:
В случае движения по окружности с постоянным ускорением эти формулы так же справедливы.
Таким образом, какой бы ни была траектория перемещения тела, тангенциальное ускорение через тангенциальную скорость рассчитывается, как производная по времени от ее модуля, то есть:
Например, если скорость изменяется по закону v = 3*t3 + 4*t, тогда at будет равно:
at = dv/dt = 9*t2 + 4.
Скорость и нормальное ускорение
Запишем в явном виде формулу для нормальной компоненты an, имеем:
an¯ = v*du¯/dt = v*du¯/dl*dl/dt = v2/r*re¯
Где re¯ – единичной длины вектор, который к центру кривизны траектории направлен. Это выражение устанавливает связь тангенциальной скорости и нормального ускорения. Видим, что последнее зависит от модуля v в данный момент времени и от радиуса кривизны r.
Нормальное ускорение появляется всегда, когда изменяется вектор скорости, однако оно равно нулю, если этот вектор сохраняет направление. Говорить о величине an¯ имеет смысл только тогда, когда кривизна траектории является конечной величиной.
Выше мы отмечали, что при движении по прямой линии нормальное ускорение отсутствует. Однако в природе существует тип траектории, при движении по которой an имеет конечную величину, а at = 0 при |v¯| = const. Этой траекторией является окружность. Например, вращение с постоянной частотой металлического вала, карусели или планеты вокруг собственной оси происходит с постоянным нормальным ускорением an и нулевым тангенциальным ускорением at.
[spoiler title=”источники:”]
http://physics.belstu.by/mechanics_lk/mechanics_lk2.html
http://1ku.ru/obrazovanie/52399-ponjatija-o-skorosti-tangencialnom-i-normalnom-uskorenijah-formuly/
[/spoiler]
как найти ускорение тангенсальное,, если дан угол между вектором полного ускорения и нормального ускорения , и дано
Мастер
(1150),
закрыт
14 лет назад
Ushi
Мастер
(1188)
15 лет назад
полное ускарение – это векторная сумма нормального и тангенсального. Все остальное делается геометрически.
Находится величина полного ускорения (нормальное ускорение делится на тангенс угла), находится угол между полным ускорением т тангенсиальном (90 – угол,кот дан) и находится тангенс ускорение как произведение косинуса найденного угла на полное ускорение
3
Тангенциальное ускорение
![]()
.Тангенциальное ускорение– векторная физическая величина,
характеризующая изменение скорости
тела по абсолютному значению, численно
равная первой производной от модуля
скорости по времени и направленная по
касательной к траектории в ту же сторону,
что и скорость, если скорость возрастает,
и противоположно скорости, если она
убывает.
4
Нормальное ускорение
![]()
.Нормальное ускорение–
векторная физическая величина,
характеризующая изменение направления
скорости, численно равная отношению
квадрата скорости к радиусу кривизны
траектории, направленная вдоль радиуса
кривизны к центру кривизны:
![]()
Рис.
1.17
.
Т
![]()
ак как векторы![]() и
и![]() направлены
направлены
под прямым углом, то (рис. 1. 17)



![]() ,
,
(1.2.9)



![]()
![]()
 5.Угловое ускорение– векторная
5.Угловое ускорение– векторная
физическая величина, характеризующая
изменение угловой скорости, численно
равная первой производной угловой
скорости по времени и направленная
вдоль оси вращения в ту же сторону, что
и угловая скорость, если скорость
возрастает, и противоположно ей, если
она убывает.
Формулу вставить
(1.2.10)
СИ:
![]()
Полное
ускорение
(линейное)
![]()
![]()
Поскольку мы ограничиваемся
рассмотрением вращения вокруг неподвижной
оси, угловое ускорение не делится на
составляющие подобно линейному.
Угловое
ускорение
![]()
Связь между угловыми характеристиками
вращающегося тела и линейными
характеристиками движения его
отдельных точек
Р
СИ:
![]()
ассмотрим одну из точек вращающегося
тела, которая находится от оси вращения
на расстоянииR,
то есть движется по окружности радиуса
R
(рис. 1.18).
Рис.
1.18



R
По истечении времени![]() точка А переместится в положение А1,
точка А переместится в положение А1,
пройдя расстояние
![]() ,
,
радиус-вектор повернется на угол![]() .
.
Центральный угол, опирающийся на дугу![]() ,
,
в радианной мере равен отношению длины
дуги к радиусу кривизны этой дуги:
![]()



A
Aэ
О
|S|
.
Э

 то
то
остается справедливым и для бесконечно
малого интервала времени![]() :
:![]() .
.
Далее, используя определения, легко
получить:
![]() ;
;
(1.2.11)
Связь
между линейными и угловыми характеристиками

![]() ;
;
(1.2.12)
![]() .
.
(1.2.13)
1.1.2.
Классификация
движений. Кинематические законы
Кинематическими
законами будем называть законы, выражающие
изменение кинематических характеристик
движения с течением времени:
–
закон пути
![]() или
или![]() ;
;
–
закон скорости
![]() или
или![]() ;
;
–
закон ускорения
![]() или
или![]() .
.
Н
Ускорение
Ускорение
гоночного автомобиля на старте
4-5 м/с2
Ускорение
реактивного самолета при посадке
6-8
м/c2
Ускорение
свободного падения вблизи поверхности
Солнца 274 м/c2
Ускорение
снаряда в стволе орудия 105
м/c2
аиболее информативной характеристикой
движения является ускорение, поэтому
оно используется в качестве основания
для классификации движений.
Нормальное
ускорение несет информацию об изменении
направления скорости, то есть об
особенностях траектории движения:
![]() –
–
движение прямолинейное (направление
скорости не меняется);
![]() –
–
движение криволинейное.
Тангенциальное
ускорение определяет характер изменения
модуля скорости с течением времени. По
этому признаку принято выделять следующие
виды движения:
![]() – равномерное движение (абсолютное
– равномерное движение (абсолютное
значение скорости не меняется);

![]() –
–
ускоренное движение
![]() –
–
неравномер- (скорость возрастает)
ное
движе-
![]() -замедленное
-замедленное
движе
ние
ние (скорость убывает).
Наиболее
простыми частными случаями неравномерного
движения являются движения, при которых
![]() –
–
тангенциальное ускорение не зависит
от времени, остается постоянным во время
движения – равнопеременное движение
(равноускоренное или равнозамедленное);
![]() или
или![]() – тангенциальное ускорение меняется с
– тангенциальное ускорение меняется с
течением времени по закону синуса или
косинуса – гармоническое колебательное
движение (например, грузик на пружине).
Аналогично для вращательного движения:
![]() –
–
равномерное вращение;
![]() –
–
неравномерное вращение
Типы
движения записать более компактно
![]() -равноускоренное
-равноускоренное
вращение
![]() –
–
замедлен-
ное
вращение;

![]() –
–
равнопе-
ременное вращение

Крутильные колебания
(например, трифилярный подвес – диск,
подвешенный на трех упругих нитях, и
совершающий колебания в горизонтальной
плоскости).
![]()
![]()
1
-1
Если
известен один из кинематических законов
в аналитической форме, то можно найти
другие, при этом возможны два типа задач:
I
тип – по заданному закону пути
![]() или
или![]() найти закон скорости
найти закон скорости![]() или
или![]() и
и
закон ускорения![]() или
или![]() ;
;
II
тип – по заданному закону ускорения
![]() или
или![]() найти закон скорости
найти закон скорости![]() или
или![]() и
и
закон пути![]() или
или![]() .
.
Эти задачи являются взаимно обратными
и решаются на основе применения обратных
математических операций. Первый тип
задач решается на основе определений,
то есть путем применения операции
дифференцирования.

ПРИМЕР.
![]() – задано
– задано![]()
![]() – ?
– ?![]()
![]() –
–
?![]() .
.
Второй
тип задач решается путем интегрирования.
Если скорость есть первая производная
от пути по времени, то путь по отношению
к скорости можно найти как первообразную.
Аналогично: ускорение есть производная
от скорости по времени, тогда скорость
по отношению к ускорению – первообразная.
Математически эти действия выглядят
так:
![]() –
–
приращение пути за бесконечно малый
промежуток времени
![]() .
.
Для конечного интервала от![]() до
до![]() интегрируем:
интегрируем: .
.
По правилам интегрирования .
.
Чтобы взять интеграл в правой части,
нужно знать вид закона скорости, то есть![]() .
.
Окончательно, для нахождения положения
тела на траектории в произвольный момент
времени получаем:
 ,
,
где (1.2.14)
![]() –
–
изменение скорости за бесконечно малый
промежуток времени
![]() .
.
Для
конечного интервала от
![]() до
до![]() :
:

Соседние файлы в папке механика.физика
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
В этой статье мы обсудим, как найти тангенциальное ускорение от различных вращательных движений, решая некоторые задачи с примерами.
Тангенциальное ускорение — это изменение тангенциальной скорости объекта на круговой траектории, перпендикулярной центростремительной силе, действующей внутрь.
Как найти тангенциальное ускорение из угловой скорости?
Вычислив изменение переменной угловой скорости во времени, мы можем найти угловое ускорение и, следовательно, тангенциальное ускорение объекта.
Тангенциальное ускорение можно определить, измерив разницу между тангенциальной скоростью, которая равна произведению угловой скорости на радиус кругового пути, пройденного объектом.
Рассмотрим объект, путешествующий с угловая скорость ω по круговой дорожке радиуса ‘r’.
Пусть «s» — смещение объекта за время «t», а «θ» — угол, образованный за счет смещения объекта. Следующий рисунок представляет то же самое.

По геометрии длина дуги s круга, охваченного объектом за время t, будет равна
s = г1 — (XNUMX)
Здесь, в приведенном выше уравнении, есть две переменные. Местоположение объекта смещается по круговой траектории, составляющей угол θ в диапазоне 0–360°.0. Следовательно, мы можем переписать приведенное выше уравнение как
Δs=rΔθ
При делении обеих частей на переменную времени имеем
Δs/θt=rΔθ/Δt
Тангенциальная скорость объекта – это смещение объекта между двумя интервалами времени. Это то же самое, что v=Δs/Δt}; а угловое смещение объекта при изменении времени равно угловой скорости объекта. Следовательно, предыдущее уравнение принимает вид
v=rω — (2)
Где v – тангенциальная скорость
Если ω является угловая скорость объекта, то угловое ускорение объекта будет
α = Δω/ Δt — (3)
Где α – угловое ускорение объекта.
Тангенциальное ускорение частицы — это изменение радиальной скорости объекта во времени, изменяющееся при изменении направления скорости.
Приведенное выше уравнение показывает взаимосвязь между тангенциальным ускорением и угловой скоростью объекта. Тангенциальное ускорение равно отношению изменения угловых скоростей объекта во времени и прямо пропорционально радиусу кругового пути, пройденного объектом.
Подробнее о Угловое ускорение.
Как найти тангенциальное ускорение при круговом движении?
Центростремительная сила удерживает тело в круговом движении, а направление тангенциальной скорости остается перпендикулярным этой силе.
Тангенциальное ускорение при круговом движении — это изменение скорости, вызванное изменением направления углового ускорения объекта.
Рассмотрим объект, движущийся в круговое движение под действием силы равна центростремительной силе.
Ф=Фc
Пусть «r» — радиус окружности, а v и a — радиальная скорость и радиальное ускорение соответственно.
ма=мв2/r
а=в2/ г – (6)
Подставляя уравнение (2) в приведенное выше уравнение, мы имеем
а=rω2 -(Один)
Это радиальное ускорение объекта, а тангенциальное ускорение объекта будет
at=dv/dt=rdω/dt=rα
Где ω — угловая скорость, а
α – угловое ускорение объекта
Полное ускорение объекта при круговом движении будет векторной суммой тангенциального ускорения и радиального ускорения.
А также,
Следовательно,
Как найти тангенциальное ускорение без учета времени?
Компания тангенциальное ускорение зависит от углового ускорение объекта.
Тангенциальное ускорение — это коэффициент изменения тангенциальной скорости, возникающей из-за изменения направления пути объекта во времени.
Ссылаясь на приведенное выше уравнение № (5), мы можем написать
at=rα—(10)
Это уравнение показывает связь между тангенциальной ускорение и угловой ускорение тела не зависит от времени.
Как найти тангенциальное ускорение маятника?
Маятник совершает гармонические колебания, составляющие угол θ по длине струны.
Возвращающая сила, действующая на струну, возвращает маятник в исходное положение, действующее по касательной к дуге. На его основе можно найти тангенциальное ускорение маятника.
Рассмотрим маятник в СГМ. Нить длины «L» прикреплена к грузу массой «m». Пусть ‘s’ будет смещением боба из-за гармонического движения.

По длине струны действует сила, равная mgCosθ, которая компенсируется натяжением струны. Возвращающая сила, действующая на груз, определяется выражением
F=-mgSinθ
ма=-mgSinθ
Для малых углов

а = гθ
Угол θ можно рассчитать, измерив длину дуги и разделив ее на длину струны.
θ = с/л
Следовательно, приведенное выше уравнение становится
а=гс/л
Тангенциальное ускорение маятника равно ускорению свободного падения и перемещению груза на длину нити.
Как найти тангенциальное ускорение с учетом времени?
Тангенциальная скорость будет увеличиваться со временем, если скорость тангенциального ускорения положительна.
Тангенциальное ускорение можно рассчитать, найдя разницу в радиальной скорости объекта, которая, очевидно, меняется, поскольку направление объекта с угловой скоростью продолжает меняться со временем.
Это дается формулой
at=двt/ дт
Где vt это радиальная скорость
Подробнее о Как найти ускорение на графике скорости: задачи и примеры.
Часто задаваемые вопросы
Задача 1: Объект движется с ускорением по окружности радиусом 10 м. Угловая скорость объекта увеличивается до 6 м/с с 4 м/с между временными интервалами в 4 секунды. Вычислите тангенциальное ускорение тела.
Данный: r = 10 м
ω1= 4 м / с
ω2= 6 м / с
Δt=4 сек
Поэтому тангенциальное ускорение равно
=10 х (6-4)/4
=10 х 2/4=5 м/с2
Следовательно, тангенциальное ускорение тела равно 5 м/с.2.
Задача 2: Рассчитайте тангенциальное ускорение и угловое ускорение мяча, движущегося по круговой траектории радиусом 5 метров со скоростью от 2 м/с до 4 м/с за 4 секунды.
Данный: V1= 2 м / с
V2= 4 м / с
Т=4с
Р=5м
Касательное ускорение равно
Поскольку, аt=rα
α = аt/r
α = 0.5 м/с2/5м=0.1 радиан/с2
Компания угловое ускорение мяча 0.1 радиан/с2.
