
Разложение ускорения  на тангенциальное
на тангенциальное  и нормальное
и нормальное  (
( — единичный касательный вектор)
— единичный касательный вектор)
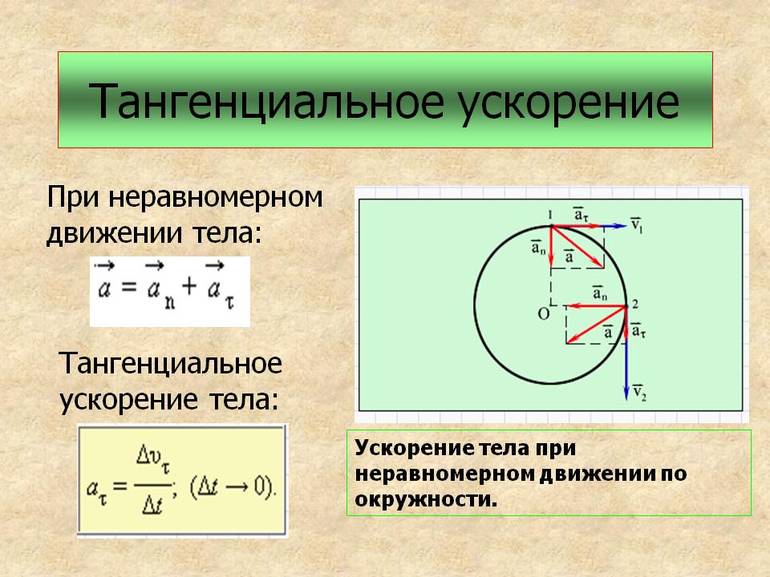
Тангенциа́льное ускоре́ние — компонента ускорения, направленная по касательной к траектории движения. Характеризует изменение модуля скорости, в отличие от нормальной компоненты, характеризующей изменение направления скорости.
Определяется как производная модуля скорости по времени, умноженная на единичный вектор  вдоль скорости. Обозначается символом, выбранным для ускорения, с добавлением индекса тангенциальной компоненты: или
вдоль скорости. Обозначается символом, выбранным для ускорения, с добавлением индекса тангенциальной компоненты: или  ,
,  ,
,  . Измеряется в м/с2 (в системе СИ).
. Измеряется в м/с2 (в системе СИ).
Величина  равна проекции полного ускорения
равна проекции полного ускорения  на касательную в данной точке кривой, что соответствует коэффициенту разложения по сопутствующему базису.
на касательную в данной точке кривой, что соответствует коэффициенту разложения по сопутствующему базису.
Общая формула[править | править код]
Величину тангенциального ускорения как проекцию вектора ускорения на касательную к траектории можно выразить так:
 ,
,

где  — путевая скорость вдоль траектории, совпадающая с абсолютной величиной мгновенной скорости в данный момент.
— путевая скорость вдоль траектории, совпадающая с абсолютной величиной мгновенной скорости в данный момент.
Если использовать для единичного касательного вектора обозначение , то можно записать тангенциальное ускорение в векторном виде:
- .

Тангенциальное ускорение параллельно вектору скорости  при ускоренном движении (положительная производная) и антипараллельно при замедленном (отрицательная производная).
при ускоренном движении (положительная производная) и антипараллельно при замедленном (отрицательная производная).
Происхождение формулы[править | править код]
Разложение полного ускорения на тангенциальную и нормальную компоненты осуществляется посредством дифференцирования по времени вектора скорости, представленного в виде  через единичный вектор касательной :
через единичный вектор касательной :
- .

Первое слагаемое — тангенциальное ускорение  , а второе — нормальное ускорение
, а второе — нормальное ускорение  (
( и
и  — радиус кривизны и единичный вектор нормали к траектории в рассматриваемой точке).
— радиус кривизны и единичный вектор нормали к траектории в рассматриваемой точке).
Некоторые примеры[править | править код]
- Пример 1
Скорость камня, сброшенного с высоты с начальной скоростью  , направленной горизонтально, до падения на землю будет изменяться как
, направленной горизонтально, до падения на землю будет изменяться как  , где
, где  — ускорение свободного падения. Модуль скорости составит
— ускорение свободного падения. Модуль скорости составит  , а значит, тангенциальное ускорение по величине равняется
, а значит, тангенциальное ускорение по величине равняется  . В начальный момент оно равно нулю, а при больших
. В начальный момент оно равно нулю, а при больших  стремится к . Можно записать тангенциальное ускорение и как вектор:
стремится к . Можно записать тангенциальное ускорение и как вектор:
- .

В этих выражениях  ,
,  — единичные векторы в декартовых координатах.
— единичные векторы в декартовых координатах.
- Пример 2
Пусть радиус-вектор тела зависит от времени по закону  .
.
В таком случае скорость тела найдётся как  . Соответственно, её модуль равен
. Соответственно, её модуль равен  и является постоянной величиной. В результате получается, что тангенциальное ускорение — ноль:
и является постоянной величиной. В результате получается, что тангенциальное ускорение — ноль:
- .

Рассмотренная зависимость  описывает равномерное движение по окружности радиусом
описывает равномерное движение по окружности радиусом  .
.
Равнопеременность[править | править код]
Движение тела с постоянным по величине тангенциальным ускорением называется равнопеременным. Слова «равнопеременное» ( const) и «равноускоренное» (
const) и «равноускоренное» ( const) не синонимичны. Взаимозаменяемыми данные термины становятся только применительно к прямолинейному движению. Тем не менее возможны определённые аналогии при рассмотрении обоих названных типов движения.
const) не синонимичны. Взаимозаменяемыми данные термины становятся только применительно к прямолинейному движению. Тем не менее возможны определённые аналогии при рассмотрении обоих названных типов движения.
Ускорение и его составляющие
В случае неравномерного движения важно
знать, как быстро изменяется скорость
с течением времени. Физической величиной,
характеризующей быстроту изменения
скорости по модулю и направлению,
является ускорение.
Рассмотрим плоское движение, т.е.
движение, при котором все участки
траектории точки лежат в одной плоскости.
Пусть вектор v задает скорость точки А
в момент времени t.
За время t
движущаяся точка перешла в положение
В и приобрела скорость, отличную от
v как по модулю, так и
направлению и равную v1
= v + v.
Перенесем вектор v1
в точку А и найдем v
(рис. 4).
Средним ускорением неравномерного
движения в интервале от t
до t + t
называется векторная величина, равная
отношению изменения скорости v
к интервалу времени t
![]()
Мгновенным ускорением а (ускорением)
материальной точки в момент времени
t будет предел среднего
ускорения:
![]()
Таким образом, ускорение a
есть векторная величина, равная первой
производной скорости по времени.
Разложим вектор v
на две составляющие. Для этого из точки
А (рис. 4) по направлению скорости v
отложим вектор
![]()
,
по модулю равный v1.
Очевидно, что вектор
![]()
,
равный
![]()
,
определяет изменение скорости за время
t
по модулю:
![]()
.
Вторая же составляющая
![]()
вектора v
характеризует изменение скорости
за время t
по направлению.
-
Тангенциальное и нормальное ускорение.
Тангенциа́льное
ускоре́ние
— компонента ускорения, направленная
по касательной к траектории движения.
Совпадает с направлением вектора
скорости при ускоренном движении и
противоположно направлено при замедленном.
Характеризует изменение модуля скорости.
Обозначается обычно или (, итд в
соответствии с тем, какая буква выбрана
для обозначения ускорения вообще в
данном тексте).
Иногда
под тангенциальным ускорением понимают
проекцию вектора тангенциального
ускорения — как он определен выше — на
единичный вектор касательной к траектории,
что совпадает с проекцией (полного)
вектора ускорения на единичный вектор
касательной то есть соответствующий
коэффициент разложения по сопутствующему
базису. В этом случае используется не
векторное обозначение, а «скалярное»
— как обычно для проекции или координаты
вектора —
![]()
.
Величину
тангенциального ускорения – в смысле
проекции вектора ускорения на единичный
касательный вектор траектории – можно
выразить так:
![]()
где
![]()
– путевая скорость вдоль траектории,
совпадающая с абсолютной величиной
мгновенной скорости в данный момент.
Если
использовать для единичного касательного
вектора обозначение
![]()
,
то можно записать тангенциальное
ускорение в векторном виде:
![]()
Вывод
Выражение
для тангенциального ускорения можно
найти, продифференцировав по времени
вектор скорости, представленный в виде
![]()
через единичный вектор касательной
:
![]()
где
первое слагаемое — тангенциальное
ускорение, а второе — нормальное
ускорение.
Здесь
использовано обозначение
![]()
для единичного вектора нормали к
траектории и
![]()
– для текущей длины траектории (![]()
);
в последнем переходе также использовано
очевидное
![]()
и,
из геометрических соображений,
![]()
Центростремительное
ускорение(нормальное) —
часть полного ускорения точки,
обусловленного кривизной траектории
и скоростью движения по ней материальной
точки. Такое ускорение направлено к
центру кривизны траектории, чем и
обусловлен термин. Формально и по
существу термин центростремительное
ускорение в целом совпадает с термином
нормальное ускорение, различаясь скорее
лишь стилистически (иногда исторически).
Особенно
часто о центростремительном ускорении
говорят, когда речь идет о равномерном
движении по окружности или при движении,
более или менее приближенном к этому
частному случаю.
Элементарная
формула
![]()
или
![]()
где
![]()
— нормальное (центростремительное)
ускорение,
![]()
— (мгновенная) линейная скорость движения
по траектории,
![]()
— (мгновенная) угловая скорость этого
движения относительно центра кривизны
траектории,
![]()
— радиус кривизны траектории в данной
точке. (Cвязь между первой формулой и
второй очевидна, учитывая ).
Выражения
выше включают абсолютные величины. Их
легко записать в векторном виде, домножив
на — единичный вектор от центра кривизны
траектории к данной ее точки:
![]()
![]()
Эти
формулы равно применимы к случаю движения
с постоянной (по абсолютной величине)
скоростью, так и к произвольному случаю.
Однако во втором надо иметь в виду, что
центростремительное ускорение не есть
полный вектор ускорения, а лишь его
составляющая, перпендикулярная траектории
(или, что то же, перпендикулярная вектору
мгновенной скорости); в полный же вектор
ускорения тогда входит еще и тангенциальная
составляющая (тангенциальное ускорение)
![]()
,
по направлению совпадающее с касательной
к траектории (или, что то же, с мгновенной
скоростью).
вывод
То,
что разложение вектора ускорения на
компоненты — одну вдоль касательного
к траектории вектора (тангенциальное
ускорение) и другую ортогональную ему
(нормальное ускорение) — может быть
удобным и полезным, довольно очевидно
само по себе. Это усугубляется тем, что
при движении с постоянной по величине
скоростью тангенциальная составляющая
будет равной нулю, то есть в этом важном
частном случае остается только нормальная
составляющая. Кроме того, как можно
увидеть ниже, каждая из этих составляющих
имеет ярко выраженные собственные
свойства и структуру, и нормальное
ускорение содержит в структуре своей
формулы достаточно важное и нетривиальное
геометрическое наполнение. Не говоря
уже о важном частном случае движения
по окружности (который, к тому же,
практически без изменения может быть
обобщен и на общий случай).
Формальный
вывод
![]()
Разложение
ускорения на тангенциальную и нормальную
компоненты (вторая из которых и есть
центростремительное или нормальное
ускорение) можно найти, продифференцировав
по времени вектор скорости, представленнный
в виде
через единичный вектор касательной
.
Где
первое слагаемое — тангенциальное
ускорение, а второе — нормальное
ускорение.
Здесь
использовано обозначение
для единичного вектора нормали к
траектории и —
для
текущей
длины траектории (
);
в последнем переходе также использовано
очевидное
.
Далее
можно просто формально назвать член
—![]()
нормальным
(центростремительным) ускорением. При
этом его смысл, смысл входящих в него
объектов, а также доказательство того
факта, что он действительно ортогонален
касательному вектору (то есть что —
действительно вектор нормали) — будет
следовать из геометрических соображений
(впрочем, то, что производная любого
вектора постоянной длины по времени
перпендикулярна самому этому вектору,
— достаточно простой факт; в данном
случае мы применяем это утверждение
для ).
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Как найти тангенциальную составляющую вектора
Рис. 1.2.7. К выводу тангенциальной составляющей ускорения: единичный вектор т направлен по касательной к траектории
Получаем два слагаемых ускорения: тангенциальное ускорение, совпадающее с направлением v в данной точке, нормальное ускорение, или центростремительное, т.к. направлено оно к центру кривизны, перпендикулярно вектору т:
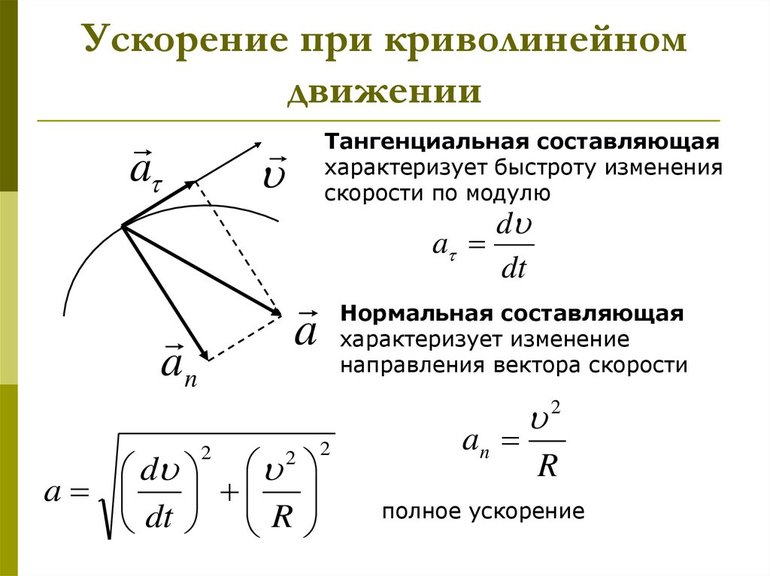
где dv/dt – скорость изменения модуля вектора скорости v.
Итак, aT показывает изменение вектора скорости по величине:
нормальная и тангенциальная составляющая вектора
Как найти нормальную и тангенциальную составляющую вектора А. Площадь Y0Z.
Пусть ваш вектор А. И есть вектор В (возможно он нормален к какой либо кривой или поверхности)
Тогда An = (A*B)/|B|) ; |B| – норма (длина вектора В) .
Произведение скалярное.
А вектор С = A – An ; тангенциальная соствляющая ( по отношению к поверхности, которой нормален В.
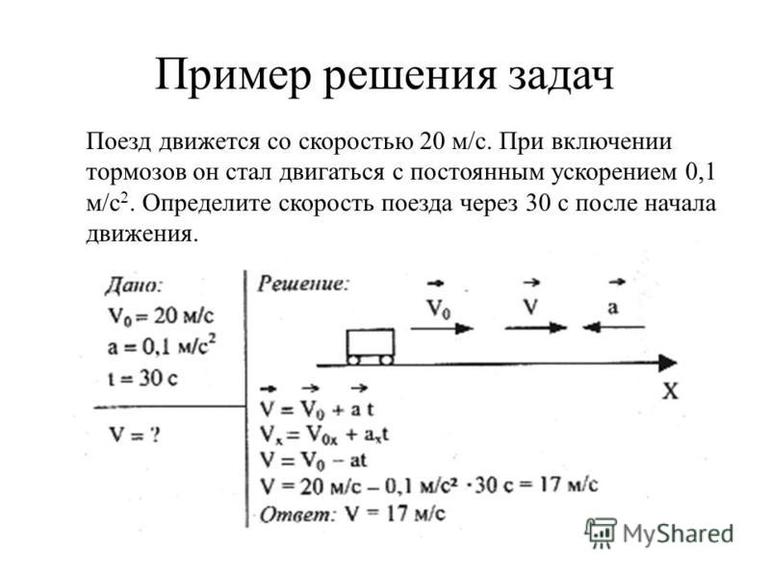
Тангенциальное ускорение – определение, формула и измерение
Общие сведения
Первая лекция для студентов, изучающих кинематику, начинается с рассмотрения тангенциального ускорения, характеризуемого произвольным движением. По сути, рассматривается неравномерное прямолинейное движение общего вида. Кинематика входит в механику и изучает перемещение объектов без учёта сил, вызвавших их движение. Под перемещением понимают изменение положения в пространстве по отношению к другому физическому телу, которое и считается точкой отсчёта. Если изменение положения связать с координатами и временем, то образуется система отсчёта. С её помощью можно определить положение объекта в любой момент.
В кинематике любые процессы принято рассматривать, приняв тело за материальную точку. То есть его размерами и формой пренебрегают. При изменении за какой-то промежуток времени точка проходит путь, описывающийся линией — траекторией. Она является скалярной величиной, а само перемещение — векторной. Движение материальной точки может происходить с разной скоростью и ускорением. Быстроту движения разделяют на среднюю и мгновенную. Вторая определяется как предел, к которому стремится скорость на бесконечно малом временном интервале: v = Δs / Δt (Δt → 0).
Перемещение может происходить с ускорением. Это физическая величина, определяющая изменение быстроты перемещения. Иными словами, показывает изменение положения за единицу времени. Измеряется она в метрах на секунду в квадрате. В кинематике существует три вида ускорения:
- Тангенциальное — направленное вдоль касательного пути точки в определённый момент. Из-за происхождения слова его часто называют касательным.
- Нормальное — совпадающее с нормалью траектории изменения положения.
- Полное — определяющееся суммой тангенциального и нормального ускорений.
Но также используется понятие «вектор среднего ускорения тела». Определяется он как приращение вектора скорости за промежуток времени: aср = Δv / Δt. При этом он будет совпадать по направлению с вектором скорости, то есть направлен в сторону вогнутости траектории.
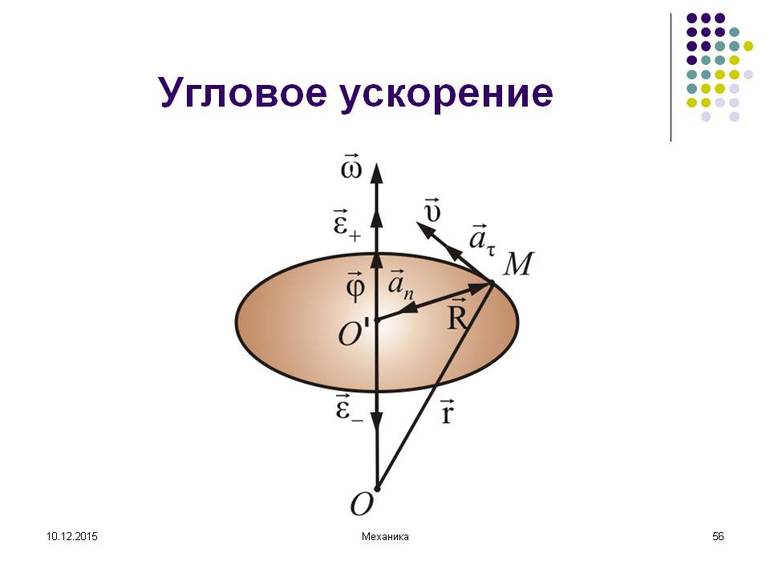
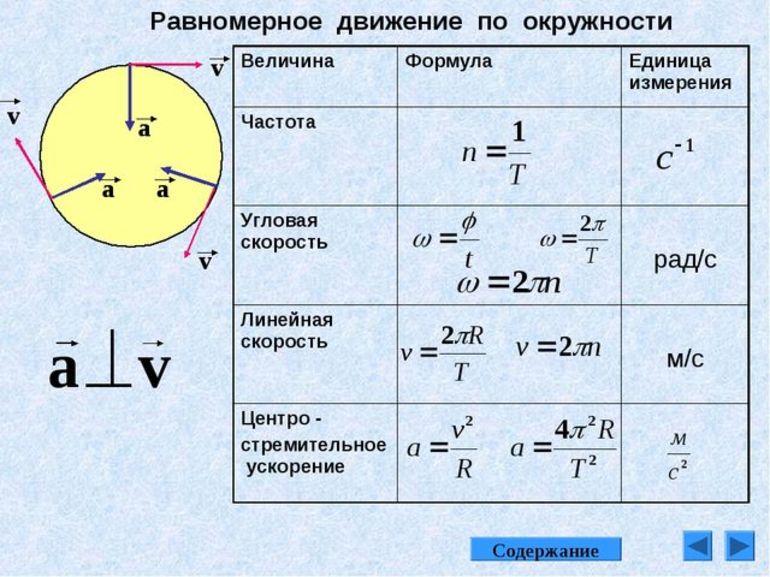
Угловое ускорение
Если имеется какая-то точка, находящаяся на вращающемся теле, то скорость её направлена по касательной. Когда движение равномерное, то линейная скорость связана с угловой равенством: v = w * r. А вот ускорение тела будет направлено по радиусу к центру окружности, причём модуль вычисляется как a = v / r либо если это точка на вращающемся теле: a = w2 * r.
В момент, когда тело поворачивается за небольшой промежуток времени на угол дельта фи, угловую скорость можно связать с условием поворота через формулу: w = Δ φ / Δ t. Если тело вращается равномерно, то промежуток времени может быть любым. В ином случае эта величина будет равна мгновенной угловой скорости.
Можно представить, что материальная точка движется неравномерно, то есть изменяется угловая скорость тела. Линейная скорость не будет представлять собой постоянную величину, в отличие от равномерного перемещения. Угол поворота равняется: w = v / r. Так как скорость не может быть константой, то отсюда следует, что и угловая скорость не будет постоянной величиной. Её изменение обозначают Δw. Она равняется разности конечной угловой скорости и начальной: Δw = wк — wн.
Изменение угловой скорости можно разделить на промежуток времени, за который оно поменяло значение: (wк — wн) / Δt. По сути, получается ускорение. Обозначается характеристика буквой эпсилон E и называется угловым ускорением. Измеряется характеристика в радианах на секунду в квадрате. Её смысл заключается в описании физической величины через отношение изменения угловой скорости тела за небольшой промежуток времени к длительности этого промежутка.
Пусть есть дуга окружности с центром. В начальный момент времени у тела есть скорость, направленная по касательной к траектории v0. Через некоторое время точка переместится по окружности на небольшое расстояние. Так как движение неравномерное, модуль скорости изменится v ≠ v0. Для того чтобы найти ускорение тела, нужно воспользоваться следующей формулой: a = Δv / Δt, при этом Δv = v — v0.
Чтобы найти эту разность, нужно воспользоваться правилом треугольника. Для этого следует перенести вектор V0 к V и соединить их линией. Радиус от центра к материальной точке можно обозначить R. Дельта V можно представить, как сумму взаимно перпендикулярных векторов. Один из них будет направленных тангенциально к радиусу, в физике обозначают его Δ Vτ, а другой радиально Δ Vr. В итоге: ΔV = Δ Vτ + Δ Vr.
Вывод формулы
Для доказательства формулы необходимо рассмотреть плоскую систему координат, в которой материальная точка изменяет своё положение по криволинейной траектории. В начальный момент её скорость будет равняться V0. Через некоторое время она изменится и станет V. На графике в плоском измерении это можно представить в виде синусоиды. В определённый момент времени скорость превышает начальную: V > V0. На схеме вектор нулевой скорости направлен из точки t0 вверх по касательной, а вектор V с нижней точки синусоиды параллельно оси ординаты.
Исходя из графика, можно сделать два вывода:
- Через промежуток времени Δt скорость изменяется как по направлению, так и по модулю: Δt = t — t0.
- Вектор изменения скорости, определяемый по правилу треугольника, будет равняться разности существующей скорости на данный момент и начальной: Δv = v — v0.
Для того чтобы построить вектор изменения Δv, нужно из конечной точки отрезка V0 провести линию к рассматриваемой точки, характеризующейся во времени скоростью V. Вершины полученного треугольника можно обозначить буквами ABD. Из верхнего угла B на сторону AD можно опустить медиану. Точка пересечения со стороной пусть будет C. Получается, что вектор Δv можно разложить на две составляющие — отрезки BC и СD. Причём медиана равняется Δvn, а изменение по оси ординаты Δvt.
Для разложения необходимо использовать вектор АС, длина которого совпадает с Vo по модулю: |AC| = |AB| = V0. Так как Δvn — результирующий вектор, то его можно вычислить через сумму: Δv = Δvn + Δvt. Причём первый член в равенстве характеризует изменение быстроты за промежуток времени по направлению, а второй — по модулю. Исходя из того, что t не равняется нулю, на него можно разделить левую и правую часть равенства: Δv / Δt = Δvn / Δt + Δvt / Δt. Если дельта-времени стремится к нулю, то формулу можно переписать в виде: lim Δv / Δt = lim Δvn / Δt + lim Δvt / Δt.
Учитывая связь между ускорениями и то, что полное значение состоит из суммы изменения быстроты движения по модулю и направлению, можно утверждать о верности формулы: a = at + an. Так как направление векторов ускорения и скорости всегда совпадают, то последний можно представить, как параметр, состоящий из двух взаимно перпендикулярных компонент:
- at — тангенциальной составляющей, совпадающей с отрезком V;
- an — перпендикулярным по отношению расположения V вектором.
Используя теорему Пифагора, можно сказать, что модуль полного ускорения равняется корню квадратному из суммы квадратов тангенциального и нормального ускорения: a = √at 2 + an 2 .
Решение простых примеров
В школьном курсе на уроках физики учащимся для закрепления материала предлагается решить определённый тип задач, используя определение тангенциального ускорения. Это типовые примеры, объясняющие суть характеристики и её применение в реальной практике. Вот некоторые из них.
- Вычислить все ускорения точки, лежащей на окружности, через десять секунд после воздействия на диск вращателя. При этом учесть, что радиус окружности составит 20 см, а угол между валом и радиус вектором тела соответствует закону: j =3-t+0.2t 3 . Для решения примера необходимо использовать формулы для нахождения угловой скорости и ускорения. Подставив заданные значения, можно получить: w = d φ / dt = -1 + 0,2 * 3t 2 и e = dw / dt = 0,6 * 2t. Применив формулу связи, легко найти ускорение: at = R * E * (0,6 * 2t) = 1,2 * Rt = 24 м 2 /с. Подставив в формулу нормального ускорения значения, можно вычислить и его an = V 2 / R = R * (0,6 * 10 2 — 1) 2 / 0,2 = 696 м/с 2 . Отсюда полное ускорение будет равняться: a = √ 24 2 + 696 2 = 697 м/с 2 .
- Материальное тело перемещается по окружности, имеющей радиус 20 см. При этом тангенциальное ускорение равняется 5 см на секунду в квадрате. Определить, сколько понадобится времени, чтобы ускорения сравнялись и нормальное стало больше тангенциального в два раза. Исходя из условия, можно утверждать, что движение является равноускоренным. Поэтому можно применить формулы: an = V2 / t; at = V / t. Отсюда: t = V / at, а V = √an * R. Подставив второе выражение в первое, получится: t = (√an * R) / at. При равенстве ускорений an = at, будет верной запись: t = √R / at = √20 / 5 = 2 с. Для второго случая an = 2at, поэтому: t = (√2 * 20) / 5 = 2,8 c.
Но не всегда решаемые задания можно решить, обойдясь одной формулой. При этом значения тех или иных величин могут быть довольно сложными для проведения вычислений. В таких случаях есть резон использовать так называемые онлайн-калькуляторы. Это специализированные сайты, выполняющие подсчёт в автоматическом режиме. Из таких сервисов можно выделить: сalc, widgety, webmath. Указанные интернет-решители работают на русском языке, так что вопросов, как с их помощью выполнять расчёты, возникнуть не должно.
Сложная задача
Пусть имеется физическое тело, которое движется, замедляясь по окружности радиусом R так, что в каждый момент времени её тангенциальное и нормальное убыстрение равны друг другу по модулю. Необходимо найти зависимость скорости и полного ускорения от времени и пройденного пути. В начальный момент скорость равняется V0.
Согласно условию, тангенциальное ускорение будет отрицательным, так как точка движется, замедляясь. Для понимания задачи можно изобразить схему движения. Для этого необходимо нарисовать окружность и указать на ней вектор начальной скорости, тангенциального и нормального ускорения. Изобразить вектор полного ускорения как сумму векторов.
Нормальное ускорение можно выразить через скорость и радиус: an = V 2 / R. Затем необходимо записать формулу для тангенциального ускорения: at = dV / dt. Так как они равны, то справедливым будет равенство: V 2 / R = dV / dt. Анализируя уравнение, можно сделать вывод, что так как скорость и радиус положительный, то слева будет стоять величина со знаком плюс. Но, с другой стороны, со временем скорость убывает, поэтому с правой стороны нужно поставить знак минус: V 2 / R = – dV / dt.
Полученное уравнение является дифференциальным и показывает зависимость скорости от времени. Равенство можно преобразовать, умножив на отношение dt / V 2 . В итоге должно получиться выражение: dV / V 2 = – dt / R. Это уравнение можно проинтегрировать. При этом пределами интеграла с левой стороны будет V0 и V, а с правой — 0 и t. Получился обыкновенный степенной интеграл, который будет равняться: 1 / V = dt / R.
Подставив пределы, можно получить равенство: (1 / V) — (1 / V0) = t / R. Из полученной формулы следует выразить скорость: V = (V0 * R) / (R + V0 * t). Поделив числитель и знаменатель на радиус, ответ примет вид: V (t) = V0 / (1 + (V0 * t / R)).
Теперь можно найти тангенциальное убыстрение, так как оно представляет производную от скорости. После взятия производной получится: at = dV / dt = – V02 / R (1 + V0 * t / R)2 = – V2 / R. Отсюда можно написать, что модуль полного ускорения будет равняться: a = √2 *|ar| = (√2 * V2) / R. Осталось найти путь. Он совпадает с длиной дуг и равняется интегралу модуля скорости от времени. После решения должно получиться равенство: S (t) = R * ln (1 + V0 * t / R). Задача решена.
[spoiler title=”источники:”]
http://sprashivalka.com/tqa/q/25509788
http://nauka.club/fizika/tangentsialno%D0%B5-uskoreni%D0%B5.html
[/spoiler]
Общие сведения
Первая лекция для студентов, изучающих кинематику, начинается с рассмотрения тангенциального ускорения, характеризуемого произвольным движением. По сути, рассматривается неравномерное прямолинейное движение общего вида. Кинематика входит в механику и изучает перемещение объектов без учёта сил, вызвавших их движение. Под перемещением понимают изменение положения в пространстве по отношению к другому физическому телу, которое и считается точкой отсчёта. Если изменение положения связать с координатами и временем, то образуется система отсчёта. С её помощью можно определить положение объекта в любой момент.
В кинематике любые процессы принято рассматривать, приняв тело за материальную точку. То есть его размерами и формой пренебрегают. При изменении за какой-то промежуток времени точка проходит путь, описывающийся линией — траекторией. Она является скалярной величиной, а само перемещение — векторной. Движение материальной точки может происходить с разной скоростью и ускорением. Быстроту движения разделяют на среднюю и мгновенную. Вторая определяется как предел, к которому стремится скорость на бесконечно малом временном интервале: v = Δs / Δt (Δt → 0).
Перемещение может происходить с ускорением. Это физическая величина, определяющая изменение быстроты перемещения. Иными словами, показывает изменение положения за единицу времени. Измеряется она в метрах на секунду в квадрате. В кинематике существует три вида ускорения:
- Тангенциальное — направленное вдоль касательного пути точки в определённый момент. Из-за происхождения слова его часто называют касательным.
- Нормальное — совпадающее с нормалью траектории изменения положения.
- Полное — определяющееся суммой тангенциального и нормального ускорений.
Но также используется понятие «вектор среднего ускорения тела». Определяется он как приращение вектора скорости за промежуток времени: aср = Δv / Δt. При этом он будет совпадать по направлению с вектором скорости, то есть направлен в сторону вогнутости траектории.
Угловое ускорение
Если имеется какая-то точка, находящаяся на вращающемся теле, то скорость её направлена по касательной. Когда движение равномерное, то линейная скорость связана с угловой равенством: v = w * r. А вот ускорение тела будет направлено по радиусу к центру окружности, причём модуль вычисляется как a = v / r либо если это точка на вращающемся теле: a = w2 * r.
В момент, когда тело поворачивается за небольшой промежуток времени на угол дельта фи, угловую скорость можно связать с условием поворота через формулу: w = Δ φ / Δ t. Если тело вращается равномерно, то промежуток времени может быть любым. В ином случае эта величина будет равна мгновенной угловой скорости.
Можно представить, что материальная точка движется неравномерно, то есть изменяется угловая скорость тела. Линейная скорость не будет представлять собой постоянную величину, в отличие от равномерного перемещения. Угол поворота равняется: w = v / r. Так как скорость не может быть константой, то отсюда следует, что и угловая скорость не будет постоянной величиной. Её изменение обозначают Δw. Она равняется разности конечной угловой скорости и начальной: Δw = wк — wн.
Изменение угловой скорости можно разделить на промежуток времени, за который оно поменяло значение: (wк — wн) / Δt. По сути, получается ускорение. Обозначается характеристика буквой эпсилон E и называется угловым ускорением. Измеряется характеристика в радианах на секунду в квадрате. Её смысл заключается в описании физической величины через отношение изменения угловой скорости тела за небольшой промежуток времени к длительности этого промежутка.
Пусть есть дуга окружности с центром. В начальный момент времени у тела есть скорость, направленная по касательной к траектории v0. Через некоторое время точка переместится по окружности на небольшое расстояние. Так как движение неравномерное, модуль скорости изменится v ≠ v0. Для того чтобы найти ускорение тела, нужно воспользоваться следующей формулой: a = Δv / Δt, при этом Δv = v — v0.
Чтобы найти эту разность, нужно воспользоваться правилом треугольника. Для этого следует перенести вектор V0 к V и соединить их линией. Радиус от центра к материальной точке можно обозначить R. Дельта V можно представить, как сумму взаимно перпендикулярных векторов. Один из них будет направленных тангенциально к радиусу, в физике обозначают его Δ Vτ, а другой радиально Δ Vr. В итоге: ΔV = Δ Vτ + Δ Vr.
Вывод формулы

Для доказательства формулы необходимо рассмотреть плоскую систему координат, в которой материальная точка изменяет своё положение по криволинейной траектории. В начальный момент её скорость будет равняться V0. Через некоторое время она изменится и станет V. На графике в плоском измерении это можно представить в виде синусоиды. В определённый момент времени скорость превышает начальную: V > V0. На схеме вектор нулевой скорости направлен из точки t0 вверх по касательной, а вектор V с нижней точки синусоиды параллельно оси ординаты.
Исходя из графика, можно сделать два вывода:
- Через промежуток времени Δt скорость изменяется как по направлению, так и по модулю: Δt = t — t0.
- Вектор изменения скорости, определяемый по правилу треугольника, будет равняться разности существующей скорости на данный момент и начальной: Δv = v — v0.
Для того чтобы построить вектор изменения Δv, нужно из конечной точки отрезка V0 провести линию к рассматриваемой точки, характеризующейся во времени скоростью V. Вершины полученного треугольника можно обозначить буквами ABD. Из верхнего угла B на сторону AD можно опустить медиану. Точка пересечения со стороной пусть будет C. Получается, что вектор Δv можно разложить на две составляющие — отрезки BC и СD. Причём медиана равняется Δvn, а изменение по оси ординаты Δvt.
Для разложения необходимо использовать вектор АС, длина которого совпадает с Vo по модулю: |AC| = |AB| = V0. Так как Δvn — результирующий вектор, то его можно вычислить через сумму: Δv = Δvn + Δvt. Причём первый член в равенстве характеризует изменение быстроты за промежуток времени по направлению, а второй — по модулю. Исходя из того, что t не равняется нулю, на него можно разделить левую и правую часть равенства: Δv / Δt = Δvn / Δt + Δvt / Δt. Если дельта-времени стремится к нулю, то формулу можно переписать в виде: lim Δv / Δt = lim Δvn / Δt + lim Δvt / Δt.
Учитывая связь между ускорениями и то, что полное значение состоит из суммы изменения быстроты движения по модулю и направлению, можно утверждать о верности формулы: a = at + an. Так как направление векторов ускорения и скорости всегда совпадают, то последний можно представить, как параметр, состоящий из двух взаимно перпендикулярных компонент:
- at — тангенциальной составляющей, совпадающей с отрезком V;
- an — перпендикулярным по отношению расположения V вектором.
Используя теорему Пифагора, можно сказать, что модуль полного ускорения равняется корню квадратному из суммы квадратов тангенциального и нормального ускорения: a = √at 2 + an 2.
Решение простых примеров
В школьном курсе на уроках физики учащимся для закрепления материала предлагается решить определённый тип задач, используя определение тангенциального ускорения. Это типовые примеры, объясняющие суть характеристики и её применение в реальной практике. Вот некоторые из них.
- Вычислить все ускорения точки, лежащей на окружности, через десять секунд после воздействия на диск вращателя. При этом учесть, что радиус окружности составит 20 см, а угол между валом и радиус вектором тела соответствует закону: j =3-t+0.2t3. Для решения примера необходимо использовать формулы для нахождения угловой скорости и ускорения. Подставив заданные значения, можно получить: w = d φ / dt = -1 + 0,2 * 3t2 и e = dw / dt = 0,6 * 2t. Применив формулу связи, легко найти ускорение: at = R * E * (0,6 * 2t) = 1,2 * Rt = 24 м2/с. Подставив в формулу нормального ускорения значения, можно вычислить и его an = V2 / R = R * (0,6 * 102 — 1)2 / 0,2 = 696 м/с2. Отсюда полное ускорение будет равняться: a = √ 242 + 6962 = 697 м/с2.
- Материальное тело перемещается по окружности, имеющей радиус 20 см. При этом тангенциальное ускорение равняется 5 см на секунду в квадрате. Определить, сколько понадобится времени, чтобы ускорения сравнялись и нормальное стало больше тангенциального в два раза. Исходя из условия, можно утверждать, что движение является равноускоренным. Поэтому можно применить формулы: an = V2 / t; at = V / t. Отсюда: t = V / at, а V = √an * R. Подставив второе выражение в первое, получится: t = (√an * R) / at. При равенстве ускорений an = at, будет верной запись: t = √R / at = √20 / 5 = 2 с. Для второго случая an = 2at, поэтому: t = (√2 * 20) / 5 = 2,8 c.
Но не всегда решаемые задания можно решить, обойдясь одной формулой. При этом значения тех или иных величин могут быть довольно сложными для проведения вычислений. В таких случаях есть резон использовать так называемые онлайн-калькуляторы. Это специализированные сайты, выполняющие подсчёт в автоматическом режиме. Из таких сервисов можно выделить: сalc, widgety, webmath. Указанные интернет-решители работают на русском языке, так что вопросов, как с их помощью выполнять расчёты, возникнуть не должно.
Сложная задача
Пусть имеется физическое тело, которое движется, замедляясь по окружности радиусом R так, что в каждый момент времени её тангенциальное и нормальное убыстрение равны друг другу по модулю. Необходимо найти зависимость скорости и полного ускорения от времени и пройденного пути. В начальный момент скорость равняется V0.
Согласно условию, тангенциальное ускорение будет отрицательным, так как точка движется, замедляясь. Для понимания задачи можно изобразить схему движения. Для этого необходимо нарисовать окружность и указать на ней вектор начальной скорости, тангенциального и нормального ускорения. Изобразить вектор полного ускорения как сумму векторов.
Нормальное ускорение можно выразить через скорость и радиус: an = V2 / R. Затем необходимо записать формулу для тангенциального ускорения: at = dV / dt. Так как они равны, то справедливым будет равенство: V2 / R = dV / dt. Анализируя уравнение, можно сделать вывод, что так как скорость и радиус положительный, то слева будет стоять величина со знаком плюс. Но, с другой стороны, со временем скорость убывает, поэтому с правой стороны нужно поставить знак минус: V2 / R = – dV / dt.
Полученное уравнение является дифференциальным и показывает зависимость скорости от времени. Равенство можно преобразовать, умножив на отношение dt / V2. В итоге должно получиться выражение: dV / V2 = – dt / R. Это уравнение можно проинтегрировать. При этом пределами интеграла с левой стороны будет V0 и V, а с правой — 0 и t. Получился обыкновенный степенной интеграл, который будет равняться: 1 / V = dt / R.
Подставив пределы, можно получить равенство: (1 / V) — (1 / V0) = t / R. Из полученной формулы следует выразить скорость: V = (V0 * R) / (R + V0 * t). Поделив числитель и знаменатель на радиус, ответ примет вид: V (t) = V0 / (1 + (V0 * t / R)).
Теперь можно найти тангенциальное убыстрение, так как оно представляет производную от скорости. После взятия производной получится: at = dV / dt = – V02 / R (1 + V0 * t / R)2 = – V2 / R. Отсюда можно написать, что модуль полного ускорения будет равняться: a = √2 *|ar| = (√2 * V2) / R. Осталось найти путь. Он совпадает с длиной дуг и равняется интегралу модуля скорости от времени. После решения должно получиться равенство: S (t) = R * ln (1 + V0 * t / R). Задача решена.
При криволинейном движении за малый промежуток времени (Delta{t}) любой участок траектории материальной точки можно рассматривать как движение по окружности.

Рис. (1). Траектория тела, движущегося криволинейно
При неравномерном криволинейном движении скорость может меняться по модулю и направлению, соответственно, есть две составляющие ускорения: тангенциальное и нормальное (центростремительное) ускорение (рис. (2)).

Рис. (2). Ускорение при криволинейном движении

Рис. (3). Тангенциальное и нормальное ускорение
Источники:
Рис. 1. Траектория тела, движущегося криволинейно. © ЯКласс.
Рис. 2. Ускорение при криволинейном движении. © ЯКласс.
Рис. 3. Тангенциальное и нормальное ускорение. © ЯКласс.
