From Wikipedia, the free encyclopedia
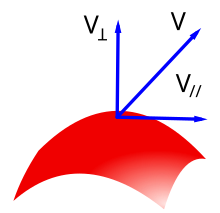
Illustration of tangential and normal components of a vector to a surface.
In mathematics, given a vector at a point on a curve, that vector can be decomposed uniquely as a sum of two vectors, one tangent to the curve, called the tangential component of the vector, and another one perpendicular to the curve, called the normal component of the vector. Similarly, a vector at a point on a surface can be broken down the same way.
More generally, given a submanifold N of a manifold M, and a vector in the tangent space to M at a point of N, it can be decomposed into the component tangent to N and the component normal to N.
Formal definition[edit]
Surface[edit]
More formally, let 




where the first vector in the sum is the tangential component and the second one is the normal component. It follows immediately that these two vectors are perpendicular to each other.
To calculate the tangential and normal components, consider a unit normal to the surface, that is, a unit vector 

and thus

where “

where “
Note that these formulas do not depend on the particular unit normal
Submanifold[edit]
More generally, given a submanifold N of a manifold M and
a point 
involving the tangent spaces:

The quotient space 
If M is a Riemannian manifold, the above sequence splits, and the tangent space of M at p decomposes as a direct sum of the component tangent to N and the component normal to N:

Thus every tangent vector 

where 

Computations[edit]
Suppose N is given by non-degenerate equations.
If N is given explicitly, via parametric equations (such as a parametric curve), then the derivative gives a spanning set for the tangent bundle (it is a basis if and only if the parametrization is an immersion).
If N is given implicitly (as in the above description of a surface, (or more generally as) a hypersurface) as a level set or intersection of level surfaces for 
In both cases, we can again compute using the dot product; the cross product is special to 3 dimensions however.
Applications[edit]
- Lagrange multipliers: constrained critical points are where the tangential component of the total derivative vanish.
- Surface normal
- Frenet–Serret formulas
- Differential geometry of surfaces#Tangent vectors and normal vectors
References[edit]
- Rojansky, Vladimir (1979). Electromagnetic fields and waves. New York: Dover Publications. ISBN 0-486-63834-0.
- Benjamin Crowell (2003) Light and Matter. (online version).
Как найти тангенциальную составляющую вектора
Рис. 1.2.7. К выводу тангенциальной составляющей ускорения: единичный вектор т направлен по касательной к траектории
Получаем два слагаемых ускорения: тангенциальное ускорение, совпадающее с направлением v в данной точке, нормальное ускорение, или центростремительное, т.к. направлено оно к центру кривизны, перпендикулярно вектору т:
где dv/dt – скорость изменения модуля вектора скорости v.
Итак, aT показывает изменение вектора скорости по величине:
нормальная и тангенциальная составляющая вектора
Как найти нормальную и тангенциальную составляющую вектора А. Площадь Y0Z.
Пусть ваш вектор А. И есть вектор В (возможно он нормален к какой либо кривой или поверхности)
Тогда An = (A*B)/|B|) ; |B| – норма (длина вектора В) .
Произведение скалярное.
А вектор С = A – An ; тангенциальная соствляющая ( по отношению к поверхности, которой нормален В.
Тангенциальное ускорение – определение, формула и измерение
Общие сведения
Первая лекция для студентов, изучающих кинематику, начинается с рассмотрения тангенциального ускорения, характеризуемого произвольным движением. По сути, рассматривается неравномерное прямолинейное движение общего вида. Кинематика входит в механику и изучает перемещение объектов без учёта сил, вызвавших их движение. Под перемещением понимают изменение положения в пространстве по отношению к другому физическому телу, которое и считается точкой отсчёта. Если изменение положения связать с координатами и временем, то образуется система отсчёта. С её помощью можно определить положение объекта в любой момент.
В кинематике любые процессы принято рассматривать, приняв тело за материальную точку. То есть его размерами и формой пренебрегают. При изменении за какой-то промежуток времени точка проходит путь, описывающийся линией — траекторией. Она является скалярной величиной, а само перемещение — векторной. Движение материальной точки может происходить с разной скоростью и ускорением. Быстроту движения разделяют на среднюю и мгновенную. Вторая определяется как предел, к которому стремится скорость на бесконечно малом временном интервале: v = Δs / Δt (Δt → 0).
Перемещение может происходить с ускорением. Это физическая величина, определяющая изменение быстроты перемещения. Иными словами, показывает изменение положения за единицу времени. Измеряется она в метрах на секунду в квадрате. В кинематике существует три вида ускорения:
- Тангенциальное — направленное вдоль касательного пути точки в определённый момент. Из-за происхождения слова его часто называют касательным.
- Нормальное — совпадающее с нормалью траектории изменения положения.
- Полное — определяющееся суммой тангенциального и нормального ускорений.
Но также используется понятие «вектор среднего ускорения тела». Определяется он как приращение вектора скорости за промежуток времени: aср = Δv / Δt. При этом он будет совпадать по направлению с вектором скорости, то есть направлен в сторону вогнутости траектории.
Угловое ускорение
Если имеется какая-то точка, находящаяся на вращающемся теле, то скорость её направлена по касательной. Когда движение равномерное, то линейная скорость связана с угловой равенством: v = w * r. А вот ускорение тела будет направлено по радиусу к центру окружности, причём модуль вычисляется как a = v / r либо если это точка на вращающемся теле: a = w2 * r.
В момент, когда тело поворачивается за небольшой промежуток времени на угол дельта фи, угловую скорость можно связать с условием поворота через формулу: w = Δ φ / Δ t. Если тело вращается равномерно, то промежуток времени может быть любым. В ином случае эта величина будет равна мгновенной угловой скорости.
Можно представить, что материальная точка движется неравномерно, то есть изменяется угловая скорость тела. Линейная скорость не будет представлять собой постоянную величину, в отличие от равномерного перемещения. Угол поворота равняется: w = v / r. Так как скорость не может быть константой, то отсюда следует, что и угловая скорость не будет постоянной величиной. Её изменение обозначают Δw. Она равняется разности конечной угловой скорости и начальной: Δw = wк — wн.
Изменение угловой скорости можно разделить на промежуток времени, за который оно поменяло значение: (wк — wн) / Δt. По сути, получается ускорение. Обозначается характеристика буквой эпсилон E и называется угловым ускорением. Измеряется характеристика в радианах на секунду в квадрате. Её смысл заключается в описании физической величины через отношение изменения угловой скорости тела за небольшой промежуток времени к длительности этого промежутка.
Пусть есть дуга окружности с центром. В начальный момент времени у тела есть скорость, направленная по касательной к траектории v0. Через некоторое время точка переместится по окружности на небольшое расстояние. Так как движение неравномерное, модуль скорости изменится v ≠ v0. Для того чтобы найти ускорение тела, нужно воспользоваться следующей формулой: a = Δv / Δt, при этом Δv = v — v0.
Чтобы найти эту разность, нужно воспользоваться правилом треугольника. Для этого следует перенести вектор V0 к V и соединить их линией. Радиус от центра к материальной точке можно обозначить R. Дельта V можно представить, как сумму взаимно перпендикулярных векторов. Один из них будет направленных тангенциально к радиусу, в физике обозначают его Δ Vτ, а другой радиально Δ Vr. В итоге: ΔV = Δ Vτ + Δ Vr.
Вывод формулы
Для доказательства формулы необходимо рассмотреть плоскую систему координат, в которой материальная точка изменяет своё положение по криволинейной траектории. В начальный момент её скорость будет равняться V0. Через некоторое время она изменится и станет V. На графике в плоском измерении это можно представить в виде синусоиды. В определённый момент времени скорость превышает начальную: V > V0. На схеме вектор нулевой скорости направлен из точки t0 вверх по касательной, а вектор V с нижней точки синусоиды параллельно оси ординаты.
Исходя из графика, можно сделать два вывода:
- Через промежуток времени Δt скорость изменяется как по направлению, так и по модулю: Δt = t — t0.
- Вектор изменения скорости, определяемый по правилу треугольника, будет равняться разности существующей скорости на данный момент и начальной: Δv = v — v0.
Для того чтобы построить вектор изменения Δv, нужно из конечной точки отрезка V0 провести линию к рассматриваемой точки, характеризующейся во времени скоростью V. Вершины полученного треугольника можно обозначить буквами ABD. Из верхнего угла B на сторону AD можно опустить медиану. Точка пересечения со стороной пусть будет C. Получается, что вектор Δv можно разложить на две составляющие — отрезки BC и СD. Причём медиана равняется Δvn, а изменение по оси ординаты Δvt.
Для разложения необходимо использовать вектор АС, длина которого совпадает с Vo по модулю: |AC| = |AB| = V0. Так как Δvn — результирующий вектор, то его можно вычислить через сумму: Δv = Δvn + Δvt. Причём первый член в равенстве характеризует изменение быстроты за промежуток времени по направлению, а второй — по модулю. Исходя из того, что t не равняется нулю, на него можно разделить левую и правую часть равенства: Δv / Δt = Δvn / Δt + Δvt / Δt. Если дельта-времени стремится к нулю, то формулу можно переписать в виде: lim Δv / Δt = lim Δvn / Δt + lim Δvt / Δt.
Учитывая связь между ускорениями и то, что полное значение состоит из суммы изменения быстроты движения по модулю и направлению, можно утверждать о верности формулы: a = at + an. Так как направление векторов ускорения и скорости всегда совпадают, то последний можно представить, как параметр, состоящий из двух взаимно перпендикулярных компонент:
- at — тангенциальной составляющей, совпадающей с отрезком V;
- an — перпендикулярным по отношению расположения V вектором.
Используя теорему Пифагора, можно сказать, что модуль полного ускорения равняется корню квадратному из суммы квадратов тангенциального и нормального ускорения: a = √at 2 + an 2 .
Решение простых примеров
В школьном курсе на уроках физики учащимся для закрепления материала предлагается решить определённый тип задач, используя определение тангенциального ускорения. Это типовые примеры, объясняющие суть характеристики и её применение в реальной практике. Вот некоторые из них.
- Вычислить все ускорения точки, лежащей на окружности, через десять секунд после воздействия на диск вращателя. При этом учесть, что радиус окружности составит 20 см, а угол между валом и радиус вектором тела соответствует закону: j =3-t+0.2t 3 . Для решения примера необходимо использовать формулы для нахождения угловой скорости и ускорения. Подставив заданные значения, можно получить: w = d φ / dt = -1 + 0,2 * 3t 2 и e = dw / dt = 0,6 * 2t. Применив формулу связи, легко найти ускорение: at = R * E * (0,6 * 2t) = 1,2 * Rt = 24 м 2 /с. Подставив в формулу нормального ускорения значения, можно вычислить и его an = V 2 / R = R * (0,6 * 10 2 — 1) 2 / 0,2 = 696 м/с 2 . Отсюда полное ускорение будет равняться: a = √ 24 2 + 696 2 = 697 м/с 2 .
- Материальное тело перемещается по окружности, имеющей радиус 20 см. При этом тангенциальное ускорение равняется 5 см на секунду в квадрате. Определить, сколько понадобится времени, чтобы ускорения сравнялись и нормальное стало больше тангенциального в два раза. Исходя из условия, можно утверждать, что движение является равноускоренным. Поэтому можно применить формулы: an = V2 / t; at = V / t. Отсюда: t = V / at, а V = √an * R. Подставив второе выражение в первое, получится: t = (√an * R) / at. При равенстве ускорений an = at, будет верной запись: t = √R / at = √20 / 5 = 2 с. Для второго случая an = 2at, поэтому: t = (√2 * 20) / 5 = 2,8 c.
Но не всегда решаемые задания можно решить, обойдясь одной формулой. При этом значения тех или иных величин могут быть довольно сложными для проведения вычислений. В таких случаях есть резон использовать так называемые онлайн-калькуляторы. Это специализированные сайты, выполняющие подсчёт в автоматическом режиме. Из таких сервисов можно выделить: сalc, widgety, webmath. Указанные интернет-решители работают на русском языке, так что вопросов, как с их помощью выполнять расчёты, возникнуть не должно.
Сложная задача
Пусть имеется физическое тело, которое движется, замедляясь по окружности радиусом R так, что в каждый момент времени её тангенциальное и нормальное убыстрение равны друг другу по модулю. Необходимо найти зависимость скорости и полного ускорения от времени и пройденного пути. В начальный момент скорость равняется V0.
Согласно условию, тангенциальное ускорение будет отрицательным, так как точка движется, замедляясь. Для понимания задачи можно изобразить схему движения. Для этого необходимо нарисовать окружность и указать на ней вектор начальной скорости, тангенциального и нормального ускорения. Изобразить вектор полного ускорения как сумму векторов.
Нормальное ускорение можно выразить через скорость и радиус: an = V 2 / R. Затем необходимо записать формулу для тангенциального ускорения: at = dV / dt. Так как они равны, то справедливым будет равенство: V 2 / R = dV / dt. Анализируя уравнение, можно сделать вывод, что так как скорость и радиус положительный, то слева будет стоять величина со знаком плюс. Но, с другой стороны, со временем скорость убывает, поэтому с правой стороны нужно поставить знак минус: V 2 / R = – dV / dt.
Полученное уравнение является дифференциальным и показывает зависимость скорости от времени. Равенство можно преобразовать, умножив на отношение dt / V 2 . В итоге должно получиться выражение: dV / V 2 = – dt / R. Это уравнение можно проинтегрировать. При этом пределами интеграла с левой стороны будет V0 и V, а с правой — 0 и t. Получился обыкновенный степенной интеграл, который будет равняться: 1 / V = dt / R.
Подставив пределы, можно получить равенство: (1 / V) — (1 / V0) = t / R. Из полученной формулы следует выразить скорость: V = (V0 * R) / (R + V0 * t). Поделив числитель и знаменатель на радиус, ответ примет вид: V (t) = V0 / (1 + (V0 * t / R)).
Теперь можно найти тангенциальное убыстрение, так как оно представляет производную от скорости. После взятия производной получится: at = dV / dt = – V02 / R (1 + V0 * t / R)2 = – V2 / R. Отсюда можно написать, что модуль полного ускорения будет равняться: a = √2 *|ar| = (√2 * V2) / R. Осталось найти путь. Он совпадает с длиной дуг и равняется интегралу модуля скорости от времени. После решения должно получиться равенство: S (t) = R * ln (1 + V0 * t / R). Задача решена.
[spoiler title=”источники:”]
http://sprashivalka.com/tqa/q/25509788
http://nauka.club/fizika/tangentsialno%D0%B5-uskoreni%D0%B5.html
[/spoiler]
нормальная и тангенциальная составляющая вектора
Сергей Диброва
Ученик
(226),
закрыт
10 лет назад
Как найти нормальную и тангенциальную составляющую вектора А. Площадь Y0Z.
Лучший ответ
Саша Русанов
Высший разум
(209180)
10 лет назад
Пусть ваш вектор А. И есть вектор В (возможно он нормален к какой либо кривой или поверхности)
Тогда An = (A*B)/|B|) ; |B| – норма (длина вектора В) .
Произведение скалярное.
А вектор С = A – An ; тангенциальная соствляющая ( по отношению к поверхности, которой нормален В.
Остальные ответы
Похожие вопросы
Иллюстрация касательной и нормальной составляющих вектора к поверхности.
В математика, учитывая вектор в точке на кривая, этот вектор может быть однозначно разложен на сумму двух векторов, один касательная кривой, называемой тангенциальная составляющая вектора и еще один перпендикуляр кривой, называемой нормальный компонент вектора. Аналогично вектор в точке на поверхность можно разбить таким же образом.
В более общем плане, учитывая подмногообразие N из многообразие M, а вектор в касательное пространство к M в точке N, его можно разложить на составляющую, касательную к N и компонент, нормальный к N.
Формальное определение
Поверхность
Более формально, пусть
где первый вектор в сумме – это тангенциальная составляющая, а второй – нормальная составляющая. Отсюда сразу следует, что эти два вектора перпендикулярны друг другу.
Чтобы вычислить тангенциальную и нормальную составляющие, рассмотрите единица нормальная на поверхность, то есть единичный вектор
и поэтому
где “
где “
Обратите внимание, что эти формулы не зависят от конкретной единичной нормали.
Подмногообразие
В более общем плане, учитывая подмногообразие N из многообразие M и точка
В Квотианифолд, указанная выше последовательность расщепляется, и касательное пространство M в п разлагается как прямая сумма компонента, касательного к N и компонент, нормальный к N:
Таким образом, каждый касательный вектор
Расчеты
Предположим N задается невырожденными уравнениями.
Если N дается явно через параметрические уравнения (например, параметрическая кривая ), то производная дает остовное множество для касательного расслоения (это базис тогда и только тогда, когда параметризация является погружение ).
Если N дано неявно (как в приведенном выше описании поверхности или, в более общем смысле, как гиперповерхность ) как набор уровней или пересечение ровных поверхностей для
В обоих случаях мы снова можем вычислить, используя скалярное произведение; Однако крестное произведение является особенным для 3-х измерений.
Приложения
- Множители Лагранжа : принужденный критические точки где тангенциальная составляющая полная производная исчезнуть.
- Поверхность нормальная
использованная литература
- Роянский, Владимир (1979). Электромагнитные поля и волны. Нью-Йорк: Dover Publications. ISBN 0-486-63834-0.
- Бенджамин Кроуэлл (2003) Свет и материя. (онлайн-версия ).
Иллюстрация касательной и нормальной составляющих вектора к поверхности.
В математике , учитывая вектор в точке на кривой , этот вектор может быть разложен однозначно как сумма двух векторов, один касательный к кривой, называемый тангенциальным компонентом вектора, а другой перпендикулярный кривой, называемый нормальная составляющая вектора. Точно так же вектор в точке на поверхности может быть разбит таким же образом.
В более общем плане , учитывая подмногообразие N из в многообразии М , и вектор в касательном пространстве к М в точке N , она может быть разложена на компоненты касательной к N и компонент нормали к N .
Формальное определение
Поверхность
Более формально, пусть будет поверхностью и точкой на поверхности. Позвольте быть вектор в Тогда можно записать однозначно в виде суммы
где первый вектор в сумме – это тангенциальная составляющая, а второй – нормальная составляющая. Отсюда сразу следует, что эти два вектора перпендикулярны друг другу.
Для того, чтобы вычислить тангенциальные и нормальные компоненты, рассмотрит блок нормального к поверхности, то есть единичный вектор перпендикулярно по Затем,
и поэтому
где ” ” обозначает скалярное произведение . Другая формула для тангенциальной составляющей:
где ” ” обозначает перекрестное произведение .
Обратите внимание, что эти формулы не зависят от конкретной используемой единичной нормали (существуют две единичные нормали к любой поверхности в данной точке, указывающие в противоположных направлениях, поэтому одна из единичных нормалей является отрицательной по отношению к другой).
Подмногообразие
В целом, учитывая Подмногообразие N из многообразия M и точки , мы получаем короткую точную последовательность
вовлекая касательные пространства :
Фактор – пространство является обобщенным пространством нормальных векторов.
Если M – риманово многообразие , указанная выше последовательность расщепляется , и касательное пространство к M в точке p разлагается как прямая сумма компонента, касательного к N, и компонента, нормального к N :
Таким образом, каждый касательный вектор разбивается как
, где и .
Расчеты
Предположим, что N задано невырожденными уравнениями.
Если N задается явно через параметрические уравнения (например, параметрическая кривая ), то производная дает остовное множество для касательного пучка (оно является базисом тогда и только тогда, когда параметризация является погружением ).
Если N задано неявно (как в приведенном выше описании поверхности или, в более общем смысле, как гиперповерхность ) как набор уровня или пересечение поверхностей уровня для , то градиенты охватывают нормальное пространство.
В обоих случаях мы снова можем вычислить, используя скалярное произведение; Однако крестное произведение является особенным для 3-х измерений.
Приложения
- Множители Лагранжа : критические точки с ограничениями – это точки , в которых тангенциальная составляющая полной производной обращается в нуль.
- Поверхность нормальная
использованная литература
-
Рожанский, Владимир (1979). Электромагнитные поля и волны . Нью-Йорк: Dover Publications. ISBN 0-486-63834-0.
- Бенджамин Кроуэлл (2003) Свет и материя. ( онлайн-версия ).
