Содержание:
Взаимное пересечение поверхностей:
При пересечении поверхностей образуется линия, которую принято называть линией взаимного пересечения поверхностей. Эта линия пересечения принадлежит одновременно двум поверхностям. Поэтому построение линии пересечения сводится к определению точек одновременно принадлежащих обеим поверхностям. Для нахождения таких точек используется в общем случае метод вспомогательных секущих поверхностей. Сущность способа заключается в следующем: Пусть задано две поверхности 
Общий алгоритм построения линии пересечения поверхностей:
- Введем вспомогательную поверхность Ф.
- Строим линии пересечения поверхности Ф с поверхностями

- Определяем точки пересечения К и М, простроенных линий a и b
- Многократно повторяя эту операцию, найдем ряд точек, принадлежащих одновременно двум поверхностям.
- Соединяем последовательно точки с учетом видимости.
В качестве посредников могут быть приняты как поверхности, так и плоскости, но целесообразно выбирать такие, которые дают наиболее простые линии пересечения с заданными поверхностями.
Взаимное пересечение поверхностей
Линия, общая для двух пересекающихся поверхностей – линия пересечения.
Чтобы определить проекцию линии пересечения, необходимо найти проекции точек, общих для этих поверхностей. Их находят способом вспомогательных секущих плоскостей или вспомогательных сфер.
Если рёбра призмы или ось вращения цилиндра перпендикулярны какой-либо из плоскостей проекций, то на этой плоскости проекций линия пересечения совпадает с контуром основания призмы или цилиндра.
Пересечение двух многогранников
Для построения линии пересечения двух многогранников необходимо определить точки пересечения ребер первого многогранника с гранями второго, затем ребер второго с гранями первого. Полученные точки соединить отрезками прямой с учетом видимости. На рисунке 9.2 заданы поверхности трехгранной призмы DEFD’E’F’ и трехгранной пирамиды SABC. Так как призма F, фронтально-проецирующая, фронтальная проекция линии пересечения совпадает с гранями призмы, поэтому необходимо построить только горизонтальную проекцию. Для этого определяем точки пересечения ребер пирамиды с гранями призмы. Ребро SC пересекает грани призмы в точках I и 2, ребро SB – в точках 3 и 4, ребро SA не пересекает призму. Затем определяем точки пересечения ребер призмы с гранями пирамиды.
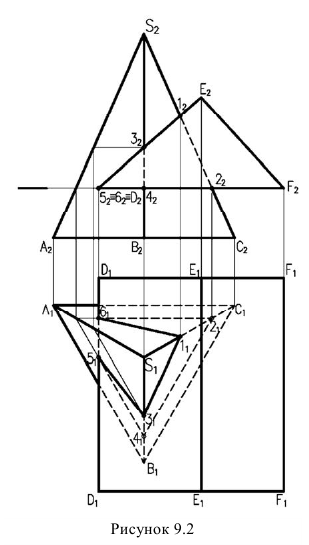
По чертежу видим, что только ребро DD’ пресекает поверхность пирамиды. Для определения точек пересечения 5 и б через ребро DD’ проводим горизонтальную плоскость, которая пересекает пирамиду по треугольнику. Точки 5 и 6 получаем, как пересечение DD’ с построенным треугольником.
Полученные точки соединяем с учетом видимости. Видимой считается тот отрезок прямой, который принадлежит двум видимым граням поверхностей.
Как видим, линия пересечения двух многогранников представляет собой пространственную ломаную линию.
В том случае, когда обе гранные поверхности общего положения, последовательность соединения точек вызывает затруднение. Поэтому для соединения точек используется диаграмма Ананова – условные развертки поверхностей (см. учебник).
Пересечение гранной и кривой поверхности
Линия пересечения гранной и кривой поверхности, представляет собой пространственную кривую линию, с точками излома на ребрах многогранника.
Поэтому сначала определяем точки пересечения ребер многогранника с кривой поверхностью, а затем промежуточные точки и соединяем их с учетом видимости. На рисунке 9.3 заданы поверхности трехгранной призмы и кругового конуса.
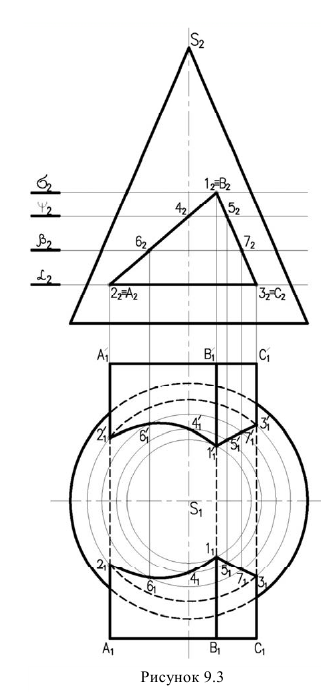
Так как призма фронтально-проецирующая, фронтальная проекция линии пересечения совпадает с проекцией боковых граней призмы, поэтому необходимо построить только горизонтальную проекцию линии пересечения.
Сначала определяем точки пересечения ребер призмы  с поверхностью конуса, а затем находим промежуточные точки, принадлежащие линиям пересечения. Для нахождения точек пересечения, используем горизонтальные плоскости посредники, так как они пересекают конус по окружностям, а призму но прямым линиям. Как видим, в данном случае линия пересечения распадается на две отдельные части.
с поверхностью конуса, а затем находим промежуточные точки, принадлежащие линиям пересечения. Для нахождения точек пересечения, используем горизонтальные плоскости посредники, так как они пересекают конус по окружностям, а призму но прямым линиям. Как видим, в данном случае линия пересечения распадается на две отдельные части.
Пересечение двух кривых поверхностей. Метод вспомогательных секущих плоскостей
Линия пересечения двух кривых поверхностей, представляет пространственную кривую линию. Поэтому для ее построения необходимо определить ряд точек принадлежащих этой лини.
На рисунке 9.4 заданы поверхности конуса и сферы. Точки строятся при помощи горизонтальных плоскостей посредников, которые рассекают обе поверхности но окружностям.
Обязательно находим опорные точки, к которым относятся высшая и низшая точки линии пересечения и точки границы видимости. Так как оси поверхностей лежат в одной фронтальной плоскости, контурные образующие поверхностей пересекаются в точках 1 и 2 — это и будет высшая и низшая точки. Точки границы видимости лежат на экваторе сферы, поэтому точки 3 и 3′ находим с помощью вспомогательной горизонтальной плоскости, проходящей через центр сферы. Она рассекает сферу по экватору, а конус но параллели радиуса R.
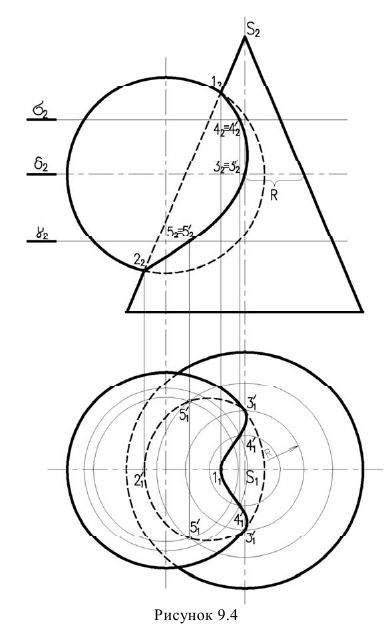
Взаимно пересекаясь, они и дают точки 3 и 3′ фронтальную проекцию определяем по вертикальной линии связи на плоскости  Затем берем еще две вспомогательные плоскости расположенные выше и ниже плоскости
Затем берем еще две вспомогательные плоскости расположенные выше и ниже плоскости  и выполняя, аналогичные построения определяем точки 4 и
и выполняя, аналогичные построения определяем точки 4 и  5 и 5′. Полученные точки соединяем с учетом видимости.
5 и 5′. Полученные точки соединяем с учетом видимости.
- Заказать чертежи
Пересечение поверхностей вращении. Метод вспомогательных секущих сфер
Способ вспомогательных секущих сфер применяется при следующих условиях:
- Пересекающиеся поверхности являются поверхностями вращения.
- Оси этих поверхностей пересекаются.
- Оси поверхностей параллельны одной из плоскостей проекций.
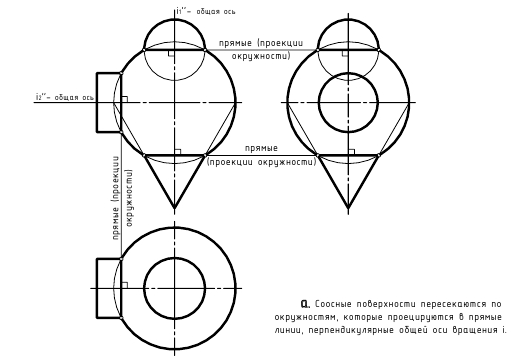
Перед рассмотрением этого способа разберем понятие соосных поверхностей. Соосными называются поверхности вращения, имеющие общую ось. Соосные поверхности пересекаются по окружностям перпендикулярным оси вращения.
На рисунке 9.5 приведены некоторые из них.
Именно то, что поверхности пересекаются по окружностям, которые проецируются в линии и используется в методе сфер. 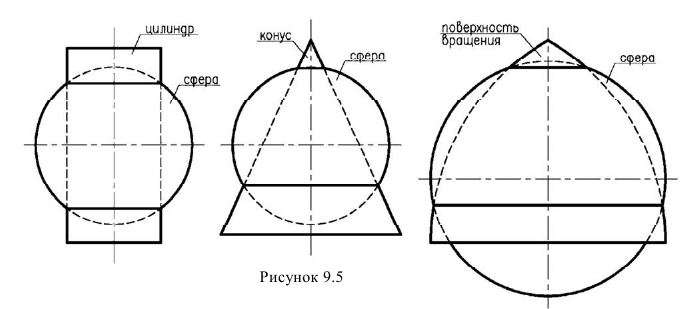
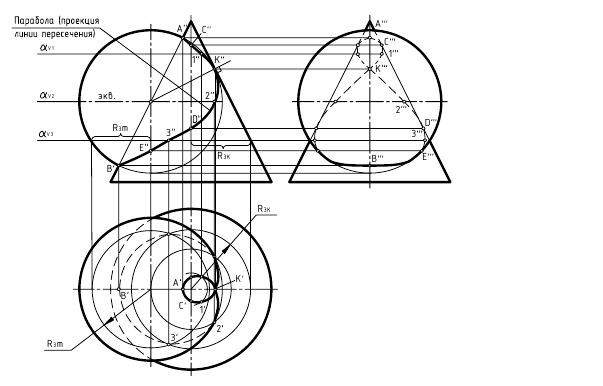
Рассмотрим пример на рисунок 9.6. Даны поверхности вращения – конус и цилиндр. Так как оси лежат в одной плоскости, можно определить точки пересечения контурных образующих в точках 1 и 2, как в предыдущем примере.
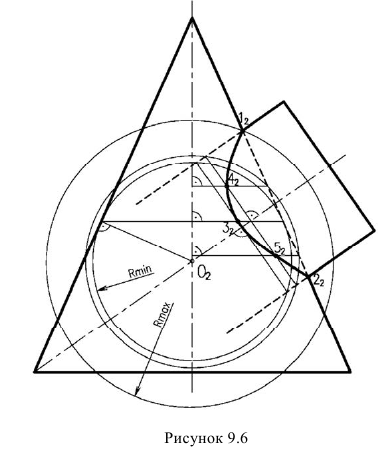
Однако, для нахождения промежуточных точек, вспомогательные секущие плоскости не подходят, т.к. горизонтальные плоскости рассекут цилиндр по эллипсам, фронтально-нроецирующие – конус по эллипсам. А сам эллипс строить непросто. Поэтому именно в этом случае удобно использовать в качестве посредников – сферы. За центр вспомогательных сфер, принимается точка пересечения осей заданных поверхностей. Далее необходимо определить, размеры радиусов вспомогательных секущих сфер. Максимальный радиус сферы
В данном случае минимальная сфера вписана в конус. Минимальная сфера касается поверхности конуса по окружности, а цилиндр пересекает по окружности. Нужно, иметь ввиду, что проекции окружностей пересечения перпендикулярны осям вращения. Эти две окружности пересекаются в точке  . Фактически таких точек две, они совпадают на фронтальной проекции. Для построения промежуточных точек берем вспомогательные сферы радиусов в пределах от
. Фактически таких точек две, они совпадают на фронтальной проекции. Для построения промежуточных точек берем вспомогательные сферы радиусов в пределах от 
Они пересекают и поверхность цилиндра, и поверхность конуса по окружностям, которые пересекаясь даюг промежуточные точки. Полученные точки соединяются плавной линией.
Здесь построена только фронтальная проекция. Для построения горизонтальной проекции, если это необходимо, точки строят как лежащие на окружностях полученных радиусов.
Теорема Монжа
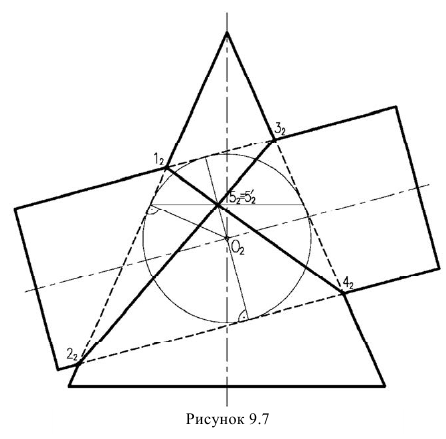
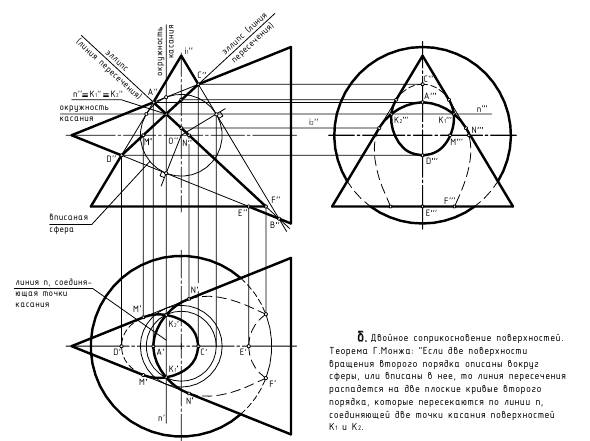
Рассмотрим вариант, когда минимальная сфера касается двух поверхностей вращения. В этом случае для построения линии пересечения поверхностей используется теорема Г. Монжа, которая формулируется так:
Если две поверхности вращении второго порядка описаны около третьей или вписаны в нее, то линии их пересечении распадается на две плоские кривые второго порядка. Плоскости этих кривых проходит через прямую, соединяющую точки пересечении линий касании.
В соответствии с этой теоремой линии пересечения конуса и цилиндра описанного около сферы (рисунок 9.7) будут плоскими кривыми -эллипсами, фронтальные проекции которых изображаются прямыми  проходящими через
проходящими через  – точки линий пересечения окружностей касания.
– точки линий пересечения окружностей касания.
Пересечение поверхностей вращения с многогранниками
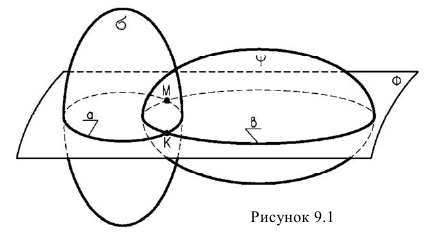
Внешние и внутренние формы большинства предметов образуются сочетанием нескольких поверхностей. Пересекаясь между собой, они образуют линии, которые принято называть линиями перехода.
На рис. 9.1 изображена деталь с несколькими линиями перехода. Линия 1 является границей между плоской и торовой поверхностями, 2 – торовой и конической, 3 – конической и плоскими (гранями призмы), 4 и 5 – торовой поверхностью корпуса и цилиндрическими поверхностями патрубков.
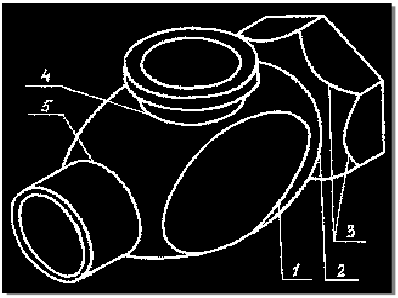 Рисунок 9.1 – Корпус с линиями перехода
Рисунок 9.1 – Корпус с линиями перехода
Линия пересечения многогранника с телом вращения в общем случае состоит из отдельных участков кривых линий, получающихся при пересечении граней многогранника с поверхностью вращения. Точки перехода от одного участка к другому находятся в пересечении ребер многогранника с телом вращения и называются точками излома. Участок линии пересечения может быть и прямой линией в случае пересечения линейчатой поверхности вращения гранью многогранника по образующей.
При проницании (полном пересечении) получаются две замкнутые линии пересечения. Они могут быть плоскими (поверхность вращения проницает одну грань) или пространственными, состоящими из нескольких плоских кривых с точками излома в местах пересечения поверхности вращения ребрами многогранника.
При врезании (неполном пересечении) получается одна замкнутая пространственная линия.
Таким образом, в соответствии с указанным выше, задачи данной темы решаются по следующему плану:
- Определяются точки излома линии пересечения, являющиеся точками пересечения ребер многогранника с поверхностью вращения;
- Находятся точки принадлежащие линиям пересечения отдельных граней многогранника с телом вращения. При этом сначала следует найти характерные (опорные) точки кривых. Это точки, проекции которых отделяют видимую часть проекции линии пересечения от невидимой, это проекции наивысших и наинизших точек линии пересечения, ближайших и наиболее удаленных, крайних слева и справа на проекциях линии пересечения;
- Определение видимости линии пересечения поверхностей и их очерков. Видимость проекций участков линии пересечения определяется из условия расположения их на видимой стороне каждой поверхности.
При построении точек линии пересечения многогранников с телами вращения используют вспомогательные секущие плоскости. Их располагают так, чтобы они пересекали данные поверхности по простым для построения линиям (прямым или окружностям).
Рассмотрим линии пересечения поверхности прямой трехгранной призмы с поверхностью конуса вращения. Боковые грани призмы являются фронтально-проецирующими плоскостями, а ось конуса перпендикулярна горизонтальной плоскости проекций.
Призму можно рассматривать, как три плоскости, проходящие через ее грани, а задача сводится к нахождению линий пересечения этих плоскостей с конусом.
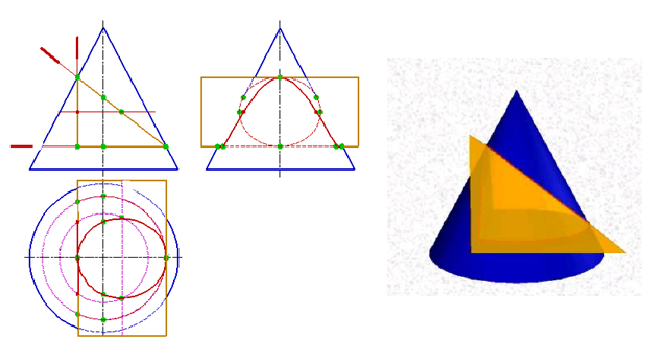
Рисунок 9.2 – Пересечение трехгранной призмы с конусом
Пример. Построить линию пересечения поверхности тора с поверх-ностью трехгранной призмы (рис. 9.3).
Решение. Боковые грани призмы являются фронтально-проецирующими плоскостями и фронтальная проекция линии пересечения совпадают с проекцией боковой поверхности призмы. Из фронтальной проекции видно, что в данном случае имеет место проницание тора призмой (две замкнутые линии пересечения).
На рис. 9.3 рассмотрен пример пересечения поверхностей тора и треугольной призмы [2].
По двум заданным проекциям строим третью – профильную.
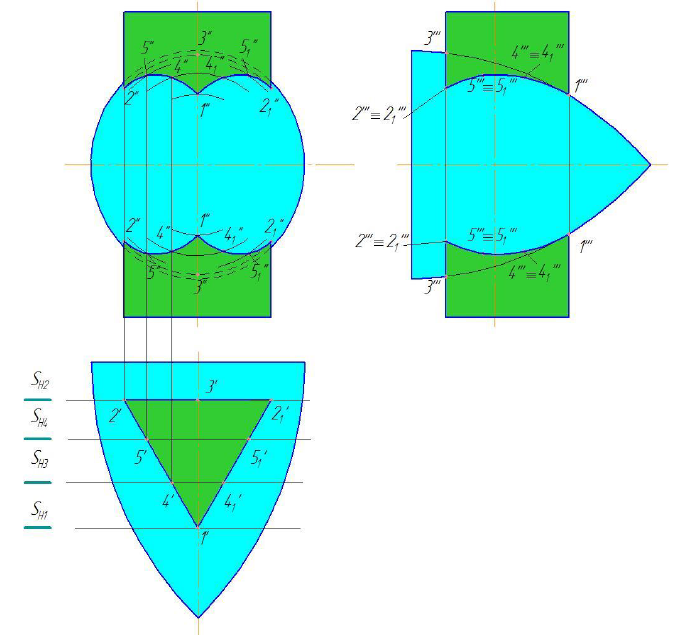
Рисунок 9.3 – Построение линии пересечения трехгранной призмы с тором
Заданная призма – горизонтально-проецирующая. Так как грани призматического отверстия перпендикулярны горизонтальной плоскости проекций, то на чертеже известна горизонтальная проекция линии пересечения, она совпадает с вырожденной проекцией поверхности призмы.
Следовательно, линия пересечения совпадает с горизонтальной проекцией основания призмы.
Определяем характерные точки: самую близкую точку 1 фронтальной плоскостью  и самые далекие –
и самые далекие –  и 3 фронтальной плоскостью S (
и 3 фронтальной плоскостью S ( ).
).
Определяем промежуточные точки 4 и 5 при помощи вспомогательных фронтальных плоскостей  .
.
Соединяем полученные точки плавной кривой линией с учетом видимости.
Пересечение поверхностей вращения
Линия пересечения двух поверхностей вращения в общем случае представляет пространственную кривую, которая может распадаться на две и более части. Эти части могут быть, в частности, и плоскими кривыми и даже прямыми линиями.
Линию пересечения поверхностей обычно строят по ее отдельным точкам. Точки подразделяются на характерные (опорные) и промежуточные (случайные).
Общим способом построения этих точек является способ вспомогательных секущих поверхностей – посредников. При пересечении данных поверхностей вспомогательной поверхностью определяются линии пересечения ее с данными поверхностями, в пересечении этих линий получаются точки, принадлежащие искомой линии пересечения.
Наиболее часто в качестве поверхностей-посредников применяются плоскости или сферы.
Для определения линии пересечения часто пользуются вспомогательными секущими поверхностями. Поверхности-посредники пересекают данные поверхности по линиям, которые, в свою очередь, пересекаются в точках линии пересечения данных поверхностей.
Секущие поверхности-посредники выбираются так, чтобы они, пересекаясь с данными поверхностями, давали простые для построения линии, например прямые и окружности.
Из общей схемы построения линии пересечения поверхностей выделяют два основных метода – метод секущих плоскостей и метод секущих сфер.
Способ вспомогательных секущих плоскостей
В качестве вспомогательных секущих плоскостей чаще всего используют плоскости, параллельные одной из плоскостей проекций.
Положение их выбирают таким, чтобы они пересекали заданные поверхности по простейшим линиям – прямым или окружностям.
Этот способ рекомендуется применять, если сечениями заданных поверхностей одной и той же плоскостью являются прямыми линиями или окружностями. Такая возможность существует в трех случаях:
- Если образующие (окружности) расположены в общих плоскостях уровня;
- Если в общих плоскостях уровня оказываются прямолинейные образующие линейчатой поверхности и окружности циклической;
- Линейчатые каркасы заданных поверхностей принадлежат общим плоскостям уровня или пучкам плоскостей общего положения.
Пересечение цилиндрической и торовой поверхности
Если одна из поверхностей является цилиндрической проецирующей поверхностью, то построение линии пересечения упрощается, так как в этом случае одна проекция линии пересечения совпадает с окружностью – проекцией цилиндра на перпендикулярную плоскость проекций.
На рис. 9.4 построена линия перехода между цилиндром и тором. Так как поверхность цилиндра перпендикулярна плоскости Н, то горизонтальная проекция линии перехода известна. Она совпадает с горизонтальной проекцией цилиндра. Фронтальную и профильную проекции строим по принадлежности точек линии перехода не проецирующей поверхности тора.

Рисунок 9.4 – Построение линии пересечения цилиндра с тором
Линия пересечения заданных поверхностей представляет собой пространственную кривую линию, имеющую фронтальную плоскость симметрии, образованную пересекающимися поверхностями цилиндра и тора.
Рассмотрим линию пересечения поверхности сферы с поверхностью конуса вращения (Рисунок 9.5).
Точки 1 и 7, расположенные на очерках фронтальных проекций конуса и сферы, очевидны и определяются без дополнительных построений.
Точка 4 на экваторе сферы построена с помощью горизонтальной плоскости, пересекающей конус по окружности. В пересечении горизонтальных проекций этой окружности и экватора находится горизонтальная проекция 4′ точки 4 и фронтальная 4” проекции точки 4 определим с помощью линии связи. Точка 4 на горизонтальной проекции разделяет кривую на видимую и невидимую части.
Точки 2, 3, 5 и 6, расположенные в промежутке между характерными точками 1,4 и 7 строим аналогично. С помощью линий связи определим фронтальные и горизонтальные проекции этих точек.
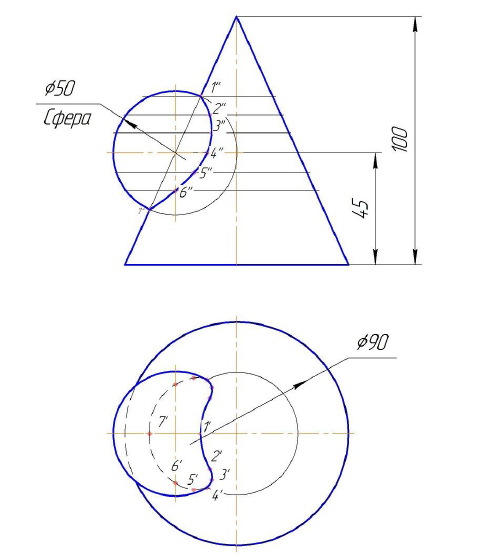
Рисунок 9.5 – Построение линии пересечения конуса и сферы
Особые случаи пересечения
Пересечение соосных поверхностей вращения
Соосными называют поверхности вращения, оси которых совпадают. Линия пересечения таких поверхностей строится на основании теоремы о пересечении соосных поверхностей вращения: соосные поверхности вращения пересекаются между собой по окружностям.
Если ось вращения соосных поверхностей перпендикулярна к какой либо плоскости проекций, то линия их пересечения проецируется на эту плоскость в виде окружности, а на другую плоскость проекций – в прямую линию.
75
На рис. 9.6 даны примеры пересечения соосных поверхностей вращения (ось вращения параллельна горизонтальной плоскости). На рис. 9.6, а приведены сфера и конус, б – сфера и цилиндр, в – сфера и тор.
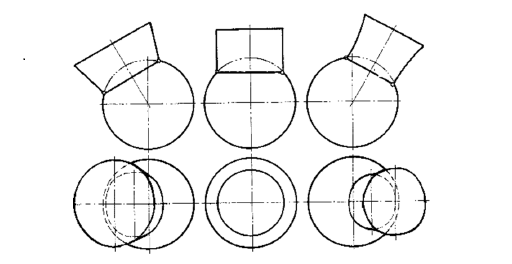
Рисунок 9.6 – Пересечение соосных поверхностей вращения
Теорема Монжа для пересекающихся поверхностей вращения
Если две поверхности второго порядка описаны около третьей или вписаны в нее, то линия их пересечения распадается на две плоские кривые второго порядка. Плоскости этих кривых проходят через прямую, соединяющую точки пересечения линий касания.
Для этого случая пересечения поверхностей вращения необходимо выполнение трех условий:
- пересекающиеся поверхности должны быть поверхностями вращения;
- оси поверхностей должны пересекаться;
- плоскость, образованная осями поверхностей, должна быть параллельна одной из плоскостей проекций.
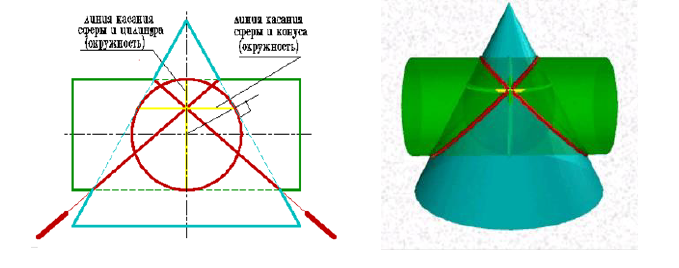
Рисунок 9.7 – Пересечение поверхностей вращения по теореме Монжа
Это положение подтверждается теоремой Монжа: Если две поверхности второго порядка могут быть вписаны или описаны около третьей поверхности второго порядка, то пространственная кривая их пересечения четвертого порядка распадается на две плоские кривые второго порядка.
Способ вспомогательных секущих сфер
При построении линии пересечения поверхностей вращения не всегда удается подобрать секущие плоскости так, чтобы они пересекали поверхности по линиям, проекции которых были бы прямыми или окружностями. В некоторых таких случаях в качестве секущих поверхностей (посредников) целесообразно применять сферы. Этот способ основан на свойстве сферы пересекаться с любой поверхностью вращения, ось которой проходит через центр сферы по окружности.
Чтобы сфера одновременно пересекала две поверхности по окружностям, проецирующимся в прямые линии, необходимо выполнить условия:
- Оси поверхностей вращения должны пересекаться (точку пересечения принимают за центр вспомогательных концентрических сфер).
- Оси поверхностей вращения должны располагаться параллельно какой-либо плоскости проекций.
Пример. Построить проекции линии пересечения поверхностей конуса и цилиндра (рис. 9.8) [1].
Заданы прямой усеченный конус и наклонный цилиндр – тела вращения. Их оси параллельны фронтальной плоскости проекций и пересекаются в точке О(о′,о), т.е. соблюдены условия метода сфер.
Как и в предыдущих задачах, найдем проекции характерных точек. Точка 1 – самая высокая, точка 2 – самая низкая. Чтобы убедится в этом проведем через оси тел вспомогательную фронтальную плоскость  . Эта плоскость рассекает рассматриваемые тела по крайним очерковым образующим, которые на фронтальную плоскость проекции проецируются без искажения и, пересекаясь между собой, образуют искомые точки 1′, 2′. С помощью вспомогательных сфер найдем другие точки линии пересечения заданных поверхностей. Для определения радиуса наименьшей сферы из центра О(о′) проведем две нормали, перпендикулярные очерковым образующим этих тел и большей нормалью выполним эту сферу. Эта сфера будет наименьшей
. Эта плоскость рассекает рассматриваемые тела по крайним очерковым образующим, которые на фронтальную плоскость проекции проецируются без искажения и, пересекаясь между собой, образуют искомые точки 1′, 2′. С помощью вспомогательных сфер найдем другие точки линии пересечения заданных поверхностей. Для определения радиуса наименьшей сферы из центра О(о′) проведем две нормали, перпендикулярные очерковым образующим этих тел и большей нормалью выполним эту сферу. Эта сфера будет наименьшей  , проведенной в большем теле, поэтому поверхности конуса она касается по окружности, которая проецируется на фронтальную плоскость проекций в виде отрезка m′′n′′, а поверхность наклонного цилиндра пересекает по окружности, фронтальная проекция которой также проецируется в прямую линию k′′l′′. В пересечении k′′l′′ и m′′n′′ получим точку 3′′ – самую глубокую точку пересечения. Для нахождения промежуточных точек проведем ряд концентрических сфер, радиусы которых должны находится в пределе
, проведенной в большем теле, поэтому поверхности конуса она касается по окружности, которая проецируется на фронтальную плоскость проекций в виде отрезка m′′n′′, а поверхность наклонного цилиндра пересекает по окружности, фронтальная проекция которой также проецируется в прямую линию k′′l′′. В пересечении k′′l′′ и m′′n′′ получим точку 3′′ – самую глубокую точку пересечения. Для нахождения промежуточных точек проведем ряд концентрических сфер, радиусы которых должны находится в пределе  , и аналогично точке 3′′ находим необходимые промежуточные точки.
, и аналогично точке 3′′ находим необходимые промежуточные точки.
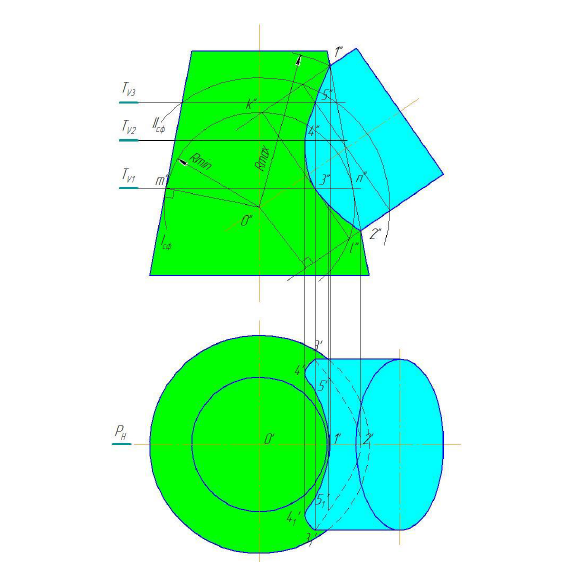
Рисунок 9.8 – Построение линии пересечения конуса и цилиндра
Учитывая, что сфера минимального радиуса всегда касается той поверхности, которая пронизывается другой, соединим найденные фронтальные проекции плавной кривой. Получим фронтальную проекцию линии пересечения. В нашем случае сфера радиусом  касается поверхности конуса, значит, поверхность цилиндра пронизывает поверхность конуса.
касается поверхности конуса, значит, поверхность цилиндра пронизывает поверхность конуса.
Построим горизонтальную проекцию линии пересечения. Т.к. точки 1′′, 2′′ лежат на очерковой образующей конуса, то горизонтальные проекции этих точек находятся на оси конуса, т.е. на горизонтальной проекции этой образующей. Для нахождения горизонтальных проекций точек 3′, 4′, 5′ воспользуемся горизонтальными плоскостями  , проведенными через эти точки соответственно. Каждая плоскость рассекает поверхность конуса по окружности, которая на горизонтальной плоскости проекций не искажается. По линиям связи найдем горизонтальные проекции точек 3′, 4′, 5′.
, проведенными через эти точки соответственно. Каждая плоскость рассекает поверхность конуса по окружности, которая на горизонтальной плоскости проекций не искажается. По линиям связи найдем горизонтальные проекции точек 3′, 4′, 5′.
Для правильного соединения точек определим их видимость. Границей видимости на плоскости Н является точка 4′′, лежащая на осевой фронтальной проекции цилиндра. Горизонтальные проекции ее  находятся на очерковых образующих цилиндра. Соединив плавной кривой найденные точки, получим горизонтальную проекцию линии пересечения рассматриваемых тел.
находятся на очерковых образующих цилиндра. Соединив плавной кривой найденные точки, получим горизонтальную проекцию линии пересечения рассматриваемых тел.
Способ вспомогательных секущих плоскостей
Суть способа – вспомогательная секущая плоскость одновременно пересекает поверхности каждого тела и образует фигуры сечения, контуры которых пересекаются. Точки пересечения контуров соединяют.
Этот способ применим тогда, когда контуры отдельных сечений представляют прямые линии или окружности.
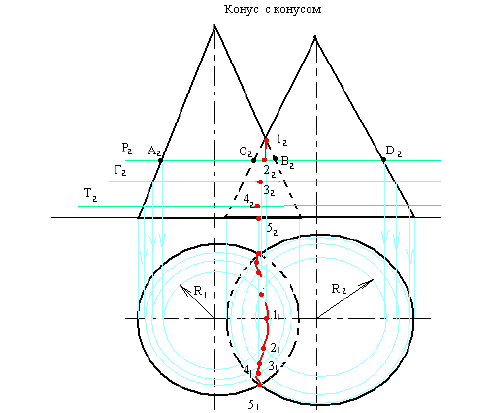
Точки  являются очевидными – это точки пересечения очерковых и оснований конусов. Найдём соответствующие вторые проекции этих точек.
являются очевидными – это точки пересечения очерковых и оснований конусов. Найдём соответствующие вторые проекции этих точек.
Проведём горизонтальную плоскость  которая рассечет оба конуса. В сечении конусов будут окружности
которая рассечет оба конуса. В сечении конусов будут окружности  причем их фронтальными проекциями являются прямые. Построим горизонтальные проекции этих сечений – окружности радиусом
причем их фронтальными проекциями являются прямые. Построим горизонтальные проекции этих сечений – окружности радиусом 
На пересечении этих окружностей сечений на  определим горизонтальную проекцию общей точки –
определим горизонтальную проекцию общей точки –  Фронтальную проекцию точек 2 и 2 определим по линиям связи на секущей плоскости
Фронтальную проекцию точек 2 и 2 определим по линиям связи на секущей плоскости 
Проведём еще ряд горизонтальных секущих плоскостей и определим проекции других промежуточных точек линии пересечения, которые соединим лекальной кривой с учётом видимости.
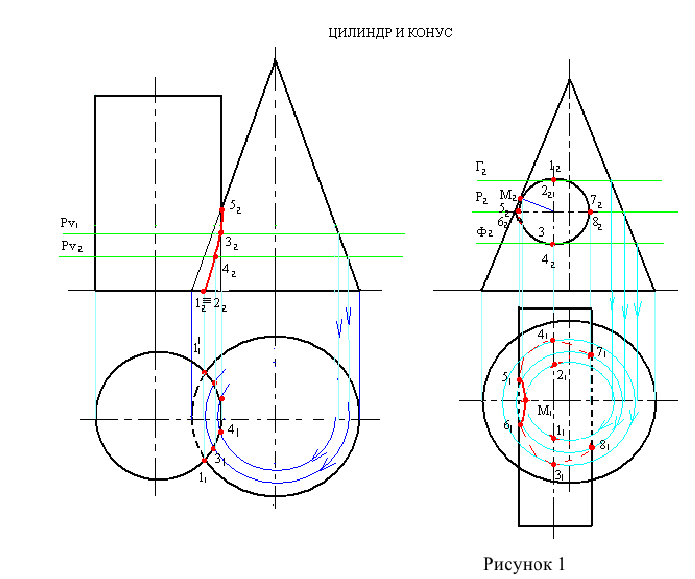
При взаимном пересечении конуса и цилиндра (рисунок 1) ось вращения цилиндра перпендикулярна  . Значит, на
. Значит, на  линия пересечения совпадет с контуром основания цилиндра, т.е. фронтальной проекцией линии пересечения будет являться фронтальная проекция цилиндра.
линия пересечения совпадет с контуром основания цилиндра, т.е. фронтальной проекцией линии пересечения будет являться фронтальная проекция цилиндра.
Построив горизонтальную проекцию линии пересечения, на  на пересечении горизонтальной оси симметрии цилиндра с проекцией цилиндра наметим точки
на пересечении горизонтальной оси симметрии цилиндра с проекцией цилиндра наметим точки 
 – точки границы видимости линии пересечения, лежащие на экваторе цилиндра.
– точки границы видимости линии пересечения, лежащие на экваторе цилиндра.
На  точки линии пересечения, лежащие выше экватора будут видимы, а точки, лежащие ниже экватора – невидимы.
точки линии пересечения, лежащие выше экватора будут видимы, а точки, лежащие ниже экватора – невидимы.
Способ вспомогательных сфер
Этот метод можно применять при соблюдении следующих условий :
- пересекающиеся поверхности должны быть поверхностями вращения;
- их оси должны пересекаться ; точка пересечения осей является центром вспомогательных сфер;
- их оси должны быть // какой-либо плоскости проекций.
Сфера  проходит через самую дальнюю очевидную точку.
проходит через самую дальнюю очевидную точку.
Сфера  , должна касаться образующей большего тела, а меньшее тело -пересекать.
, должна касаться образующей большего тела, а меньшее тело -пересекать.
Сфера  определяется как большее расстояние от центра сфер до образующих обоих тел – перпендикуляры из центра сфер к очерковым образующим. Больший перпендикуляр и будет являться радиусом минимальной сферы.
определяется как большее расстояние от центра сфер до образующих обоих тел – перпендикуляры из центра сфер к очерковым образующим. Больший перпендикуляр и будет являться радиусом минимальной сферы.
Сфера пересекает тела по окружностям, проецирующимся на одну из плоскостей проекций отрезком.
1. Определяем очевидные точки 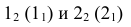
2. Восстанавливаем перпендикуляры из центра сфер к очерковым образующим цилиндра и конуса. Перпендикуляр к цилиндру
к очерковым образующим цилиндра и конуса. Перпендикуляр к цилиндру  больше, чем перпендикуляр к образующей конуса. Значит,
больше, чем перпендикуляр к образующей конуса. Значит,  и будет являться радиусом минимальной сферы. На
и будет являться радиусом минимальной сферы. На  проводим из центра
проводим из центра  этим радиусом R окружность, которая рассечет и конус и цилиндр по окружностям, фронтальной проекцией которых будут прямые – сечение конуса
этим радиусом R окружность, которая рассечет и конус и цилиндр по окружностям, фронтальной проекцией которых будут прямые – сечение конуса и сечение цилиндра
и сечение цилиндра 
На пересечении этих сечений определяем фронтальную проекцию точки 3 –  .
.
3. На  строим горизонтальную проекцию сечения конуса, на котором находится точка 3 -окружность радиусом
строим горизонтальную проекцию сечения конуса, на котором находится точка 3 -окружность радиусом  / 2, на которой по линии связи определяем точки
/ 2, на которой по линии связи определяем точки
1. Проводим ещё ряд секущих сфер радиусом больше минимальной и меньше максимальной и определяем другие промежуточные точки линии пересечения, которые соединяем лекальной кривой с учётом видимости.
Большее тело поглощает меньшее.
2. Видимость линии пересечения определяем следующим образом:
Элементы технического рисования
Технический рисунок – это наглядное изображение, выполненное по правилам аксонометрических проекций от руки, на глаз, соблюдая пропорции. Им пользуются на производстве для иллюстрации чертежей.
Обычно технический рисунок выполняется в изометрии.
Выполнение рисунка модели или детали начинается с проведения аксонометрических осей. Затем рисуется основание и строятся габаритные очертания -прямоугольные параллелепипеды. Деталь мысленно расчленяют на отдельные геометрические элементы, постепенно вырисовывая все элементы.
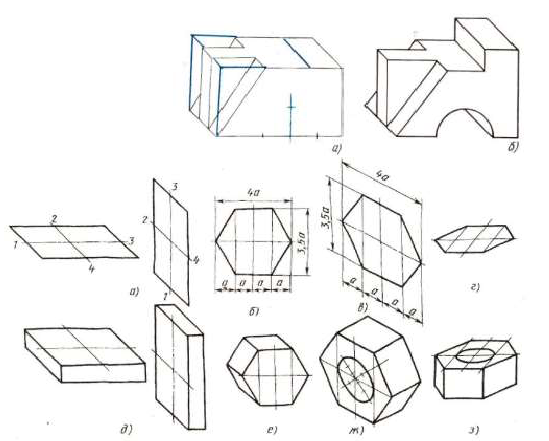
Технические рисунки получаются более наглядными, если их покрыть штрихами. При нанесении штрихов считают, что лучи света падают на предмет справа и сверху или слева и сверху.
Взаимное пересечение поверхностей с примерами
Алгоритм решения задач по определению линии пересечения поверхностей Ф’ и Ф” (рис. 9.1) в целом аналогичен решению второй позиционной задачи и состоит в следующем:
- Обе заданные поверхности Ф’ и Ф” рассекают третьей, вспомогательной плоскостью или поверхностью P.
- Определяют линии пересечения каждой заданной поверхности со вспомогательной: Ф’ × P =l’, Ф” × P =l”.
- Определяют точки пересечения полученных линий l’×l” = A и A’. Точки A и a´ принадлежат обеим поверхностям.
- Проведя несколько вспомогательных поверхностей, находят достаточное количество точек и соединяют их плавной лекальной кривой, которая и является искомой линией пересечения поверхностей.
- Определяют видимость поверхностей и линии их пересечения.
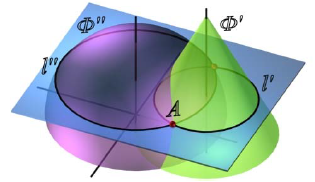
Рис. 9.1. Пересечение поверхностей
В качестве вспомогательных поверхностей P следует выбирать поверхности – плоскости или сферы, которые пересекают обе заданные поверхности по наиболее простым для построения линиям – прямым или окружностям. Кроме того, если в сечении поверхности получаются окружности, они должны проецироваться на одну из плоскостей проекций без искажения.
Определение точек линии пересечения поверхностей начинают с построения так называемых опорных точек. К ним относятся:
- точки пересечения очерковых образующих, если образующие лежат в одной плоскости,
- точки, лежащие на очерковых образующих поверхностей,
- точки, лежащие в общей плоскости симметрии,
- экстремальные (верхние – нижние, правые – левые) по отношению к плоскостям проекций, к центру концентрических сфер.
При соединении точек следует иметь ввиду, что проекции линии пересечения не могут выходить за пределы общей площади – площади наложения – проекций пересекающихся поверхностей. Видимыми будут те участки линии пересечения, которые принадлежат видимым частям обеих поверхностей.
Способ вспомогательных параллельных плоскостей
Этот способ заключается в том, что обе поверхности рассекаются параллельными плоскостями уровня. Этот способ применяют лишь в тех случаях, когда вспомогательные плоскости рассекают поверхности по простым линиям – прямым или окружностям, которые проецируются на соответствующую плоскость проекций без искажения.
Рассмотрим построение линии пересечения прямого кругового конуса и сферы (рис. 9.2).
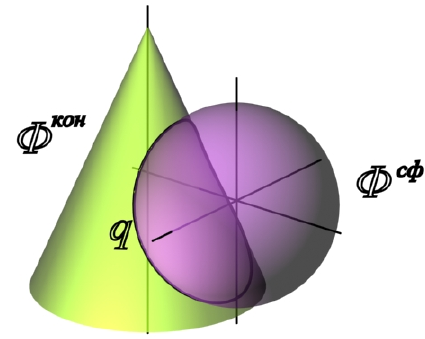
Рис. 9.2. Линия пересечения поверхностей прямого кругового конуса и сферы
Фронтальные плоскости уровня пересекают поверхность конуса по гиперболам, следовательно, для решения данной задачи нужно применить горизонтальные плоскости уровня, которые рассекают обе данные поверхности по окружностям.
Решение задачи начинают с построения опорных точек. Конус и сфера имеют общую плоскость симметрии γ(γ1), параллельную плоскости П2. Поэтому высшая точка A и низшая точка F линии пересечения получаются как результат пересечения очерковых образующих конуса и сферы (рис. 9.3).
Остальные точки определяются с помощью горизонтальных плоскостей уровня. Более подробно разберем построение точек E и E'(рис. 9.4).
1. Пересечь обе поверхности вспомогательной горизонтальной плоскостью уровня α(а2). Плоскость а(а2) пересекает сферу по окружности m(m1,m2), а конус – по окружности q(q1,q2):
m(m1 ,m 2)=Ф сф  а (а2);
а (а2);
q(q1 ,q2) =Фк а (u2).
2. Построив горизонтальные проекции окружностей m и q, определить точки их пересечения E и E’:
E1= m1 × q1; E2=E1E2α2.
E’1=m1 × q1; E’2=ElE2α2.
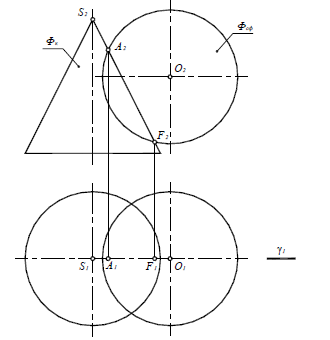
Рис. 9.3. Определение опорных точек линии пересечения поверхностей
3. Аналогичным образом определяются остальные точки, формирующие линию пересечения (рис. 9.5,а). Они получены с помощью горизонтальных плоскостей уровня β(β2), δ(δ2) и μ(μ2). Пределы этих плоскостей по высоте определяют высшая и низшая опорные точки линии пересечения поверхностей. Плоскость μ(μ2)рассекает поверхность сферы по очерковой образующей b (b2, b2),поэтому полученные точки В и В’ являются опорными, ограничивающими линию пересечения поверхностей по ширине.
4. Последовательно соединить одноименные проекции полученных точек плавной лекальной кривой. Полученная линия не должна выходить за пределы области перекрытия проекций данных поверхностей.
5. Определить видимость линии пересечения поверхностей и их очерковых образующих.
Поверхность конуса на горизонтальной плоскости проекций полностью видима, следовательно, видимость линии пересечения определяется по поверхности сферы. Видима будет та часть сферы, которая на П2 лежит выше очерковой образующей b2.Точки В и В’ на очерковой образующей сферы являются точками смены видимости линии пересечения на плоскости проекций П1.
Искомая линия пересечения поверхностей конуса и сферы d(d1,d2) (кривая второго порядка), полученная способом вспомогательных секущих плоскостей, приведена на рис 9.5,б.
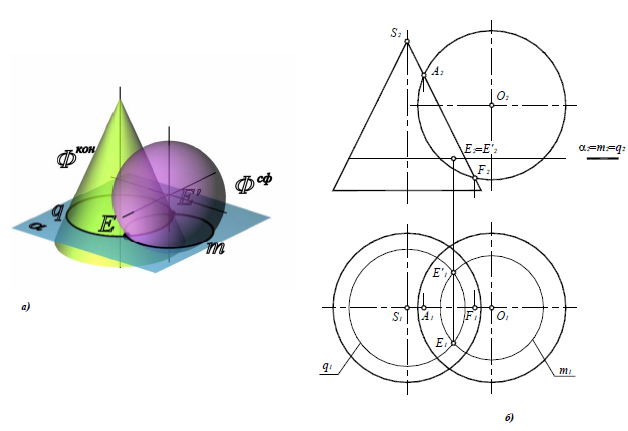
Рис. 9.4. Определение промежуточных точек линии пересечения поверхностей:
а – наглядное изображение;
б – комплексный чертеж
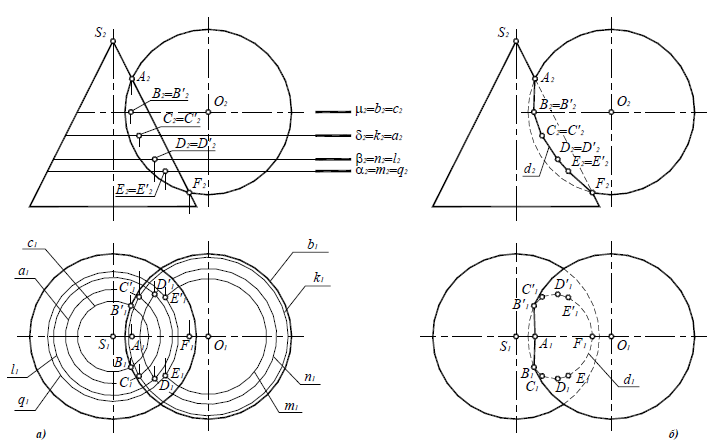
Рис. 9.5. Определение линии пересечения поверхностей способом вспомогательных параллельных плоскостей:
а – определение промежуточных точек;
б – искомая линия пересечения
Способ вспомогательных сфер
При построении линии пересечения двух поверхностей способом вспомогательных сфер возможны два случая. В одном из них используются сферы, проведенные из одного, общего центра (концентрические), а в другом -сферы, проведенные из разных центров (эксцентрические).
Способ концентрических сфер
Этот способ применяется для построения линии пересечения поверхностей вращения произвольного вида, при условии, что оси этих поверхностей пересекаются.
В основу способа концентрических сфер положено свойство сферы с центром на оси какой-либо поверхности.
Если центр сферы находится на оси любой поверхности вращения, то сфера соосна с поверхностью вращения и в их пересечении получатся окружности (рис. 9.6).
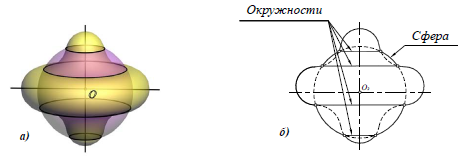
Рис. 9.6. Соосные поверхности вращения:
a- наглядное изображение;
б – на комплексном чертеже
Рассмотрим способ концентрических сфер на примере построения линии пересечения цилиндра и конуса вращения, оси которых i(i1,i2) и q(q1,q2) пересекаются и точка пересечения осей обозначена через O (O1 ,O2)(рис. 9.7).
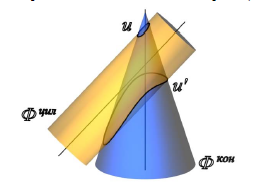
Рис. 9.7. Линия пересечения поверхностей цилиндра и прямого кругового конуса
Точка пересечения осей поверхностей принимается за центр вспомогательных концентрических сфер.
Алгоритм решения задачи об определении линии пересечения поверхностей состоит в следующем:
1. Определить опорные точки (рис. 9.8). Так как обе данные поверхности имеют общую плоскость симметрии δ(δ1), параллельную плоскости проекций П2, то их очерковые образующие, по отношению к плоскости П2,пересекаются. Точки A(A1,A2), B(B1,B2), C(C1,C2) и D(D1,D2) пересечения этих образующих являются точками видимости линии пересечения поверхностей.
2. Определить радиусы максимальной и минимальной сфер, необходимых для определения точек линии пересечения.
Радиус максимальной сферы Rmax равен расстоянию от центра вспомогательных сфер до наиболее удаленной точки пересечения очерковых образующих, в данном случае Rmax=O2A2 (рис. 9.9).
Чтобы определить радиус минимальной сферы Rmin, необходимо провести через точку O2 нормали к очерковым образующим данных поверхностей. Тогда больший из отрезков этих нормалей и будет Rmin. В этом случае сфера минимального радиуса будет касаться одной из данных поверхностей, а со второй – пересекаться.
В данном случае сферой минимального радиуса является сфера, касающаяся цилиндрической поверхности (см. рис. 9.9).
Сфера радиусом Rmin касается цилиндрической поверхности по окружности m, которая на фронтальной проекции изображается в виде прямой m2, перпендикулярной q2(m2 q2). Эта же сфера пересекает коническую поверхность по двум окружностям. Но, в данном случае, нам интересна только окружность n, так как только она дает решение. Эта окружность n изображается на фронтальной проекции в виде прямой n2, перпендикулярной i2(n2i2). Точки E и Fпересечения этих окружностей будут принадлежать обеим поверхностям:
q2). Эта же сфера пересекает коническую поверхность по двум окружностям. Но, в данном случае, нам интересна только окружность n, так как только она дает решение. Эта окружность n изображается на фронтальной проекции в виде прямой n2, перпендикулярной i2(n2i2). Точки E и Fпересечения этих окружностей будут принадлежать обеим поверхностям:
m2×n2 =E2, F2.
Чтобы построить горизонтальные проекции точек Е и F следует воспользоваться окружностью n, содержащей данные точки, так как она не искажается на плоскости проекций П1:
E1 ,F 1∈ n1.
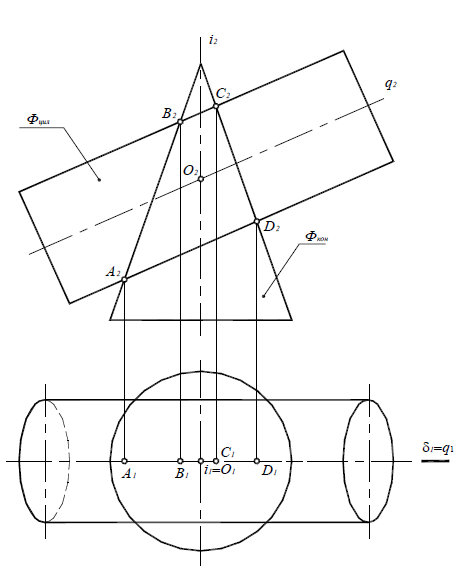
Рис. 108. Определение опорных точек линии пересечения поверхностей
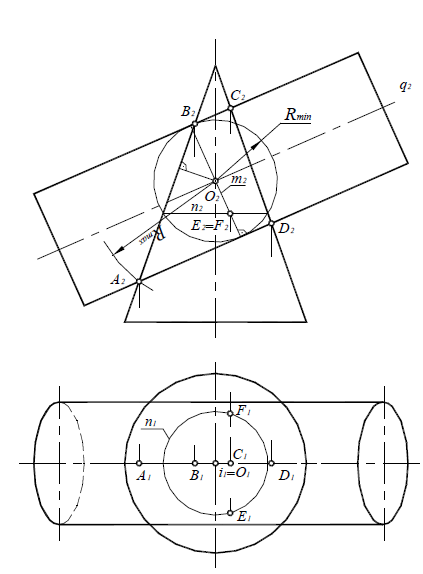
Рис. 9.9. Определение радиусов максимальной и минимальной сфер.
Для построения промежуточных точек линии пересечения проводят несколько концентрических сфер с центром в точке O, причем радиус R этих сфер должен изменяться в пределах Rmin< R < Rmax.
Рассмотрим определение точек линии пересечения на примере сферы радиусом R1 (Rmin1max) (рис. 9.10, 9.11).
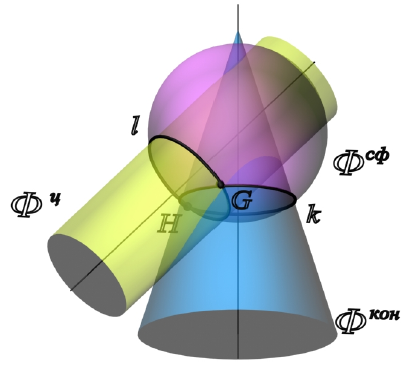
Рис. 9.10. Определение промежуточных точек линии пересечения поверхностей
Сфера радиусом R1 пересекает цилиндрическую поверхность по окружности l, которая на фронтальной проекции изображается в виде прямой l2, перпендикулярной q2( 12q2). Эта же сфера пересекает коническую поверхность по окружности k, которая изображается на фронтальной проекции в виде прямой k2, перпендикулярной i2(k2i2). Точки G и Hпересечения этих окружностей будут точками искомой линии пересечения:
12×k2=G2, H2.
Чтобы построить горизонтальные проекции точек G и H, следует воспользоваться окружностью k, содержащей данные точки, так как она не искажается на плоскости проекций Π1: G1∈ k 1.
4. Аналогичным образом определить все остальные точки искомой линии пересечения. Последовательно соединить полученные точки плавной лекальной кривой. В данном случае линия пересечения поверхностей цилиндра и конуса представляет собой две кривые второго порядка u(u1,u2) и u( u’1 ,u 2) (рис. 9.12).
Горизонтальная проекция линии пересечения поверхностей симметрична относительно плоскости δ(δ1) – общей плоскости симметрии данных поверхностей. Эта плоскость была указана ранее (см. рис. 9.8).
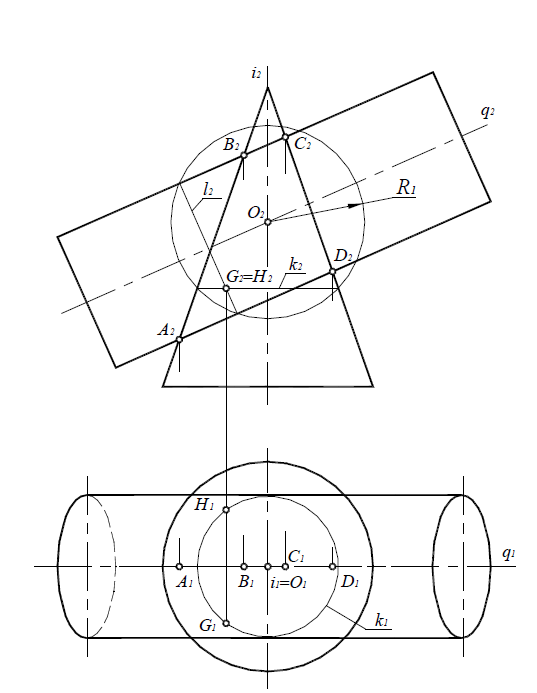
Рис. 9.11. Определение промежуточных точек линии пересечения поверхностей
5. Определить видимость линии пересечения поверхностей и их очерковых образующих. На фронтальной плоскости проекций видимы будут те точки линии пересечения, которые лежат перед горизонтальной проекцией очерковых образующих, проекции которых совпадают с плоскостью симметрии δ(δ1), – точки A, M, G, E, D и B, K, P, C. На горизонтальной плоскости проекций линия u(u1,u2) видима, так как все ее точки лежат выше фронтальной проекции оси вращения цилиндра q(q2), а линия u(u1 ,u2)будет невидима, поскольку все ее точки лежат ниже фронтальной проекции образующих, совпадающих с проекцией оси вращения цилиндра q(q2).
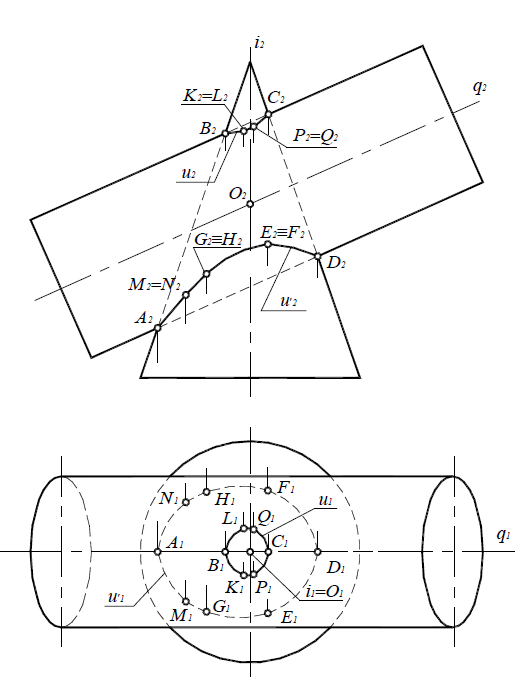
Рис. 9.12. Линия пересечения поверхностей цилиндра и конуса
Пересечение поверхностей
Пересечение поверхностей и способы построения линий пресечения
Линия пересечения принадлежит обеим пересекающимся поверхностям и образуется множеством их общих точек. Следовательно, построение линии пересечения поверхностей сводится к построению этих общих точек.
При пересечении поверхностей вращения порядок линии пересечения определяется умножением порядков пересекающихся поверхностей. Например, если пересекаются круговой конус (поверхность 2-го порядка) и сфера (поверхность 2-го порядка), то линия пересечения является кривой 4-го порядка.
Определение способа построения линии пересечения зависит от взаимного расположения пересекающихся поверхностей, а также от их расположения относительно плоскостей проекций. Из всех возможных вариантов пересечения поверхностей геометрических тел в зависимости от их взаимного расположения можно выделить четыре случая, которые позволяют определить и представить форму линии пересечения поверхностей:
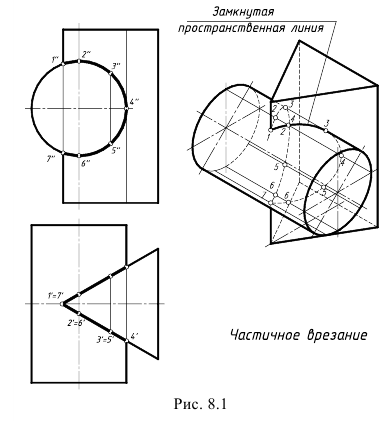
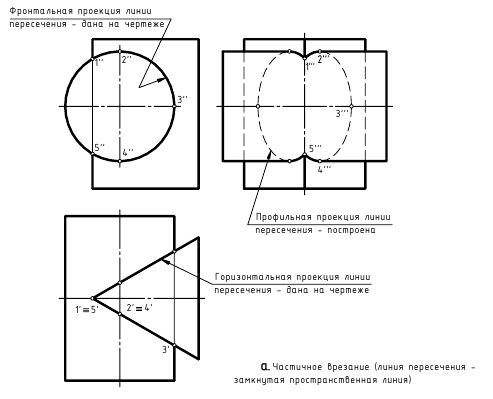
I случай. Частичное врезание (рис. 8.1). В этом случае линией пересечения является одна замкнутая пространственная линия.
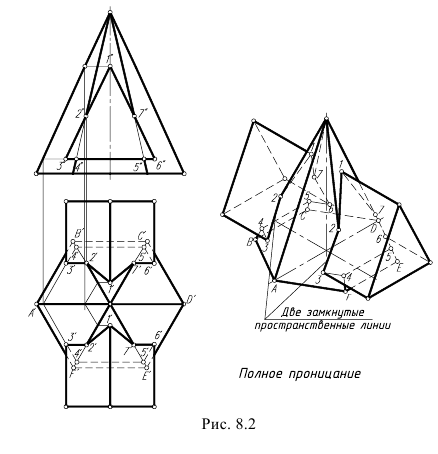
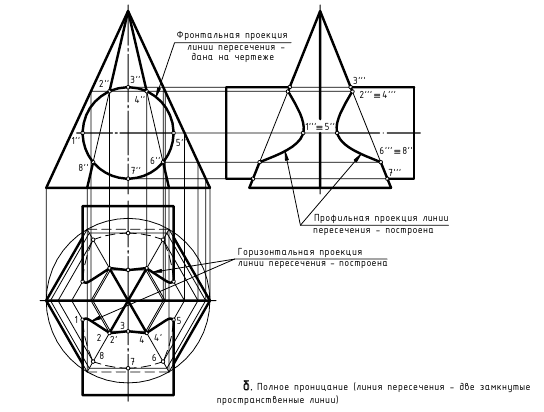
II случай. Полное проницание (рис. 8.2). В этом случае линией пересечения являются две замкнутые пространственные линии.
III случай. Одностороннее соприкосновение (рис. 8.3). В этом случае поверхности соприкасаются в одной общей точке K1 и линия их пересечения, проходя через эту точку, распадается на две замкнутые пространственные линии (поверхности имеют одну общую касательную плоскость).
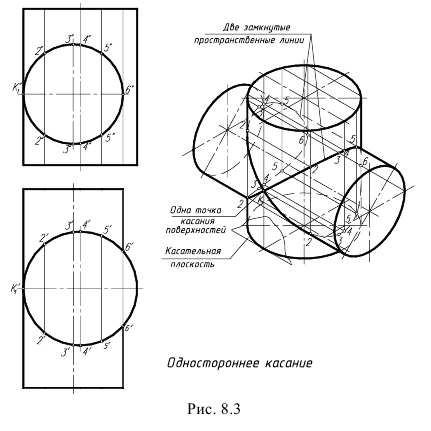
IV случай. Двойное соприкосновение (рис. 8.4).
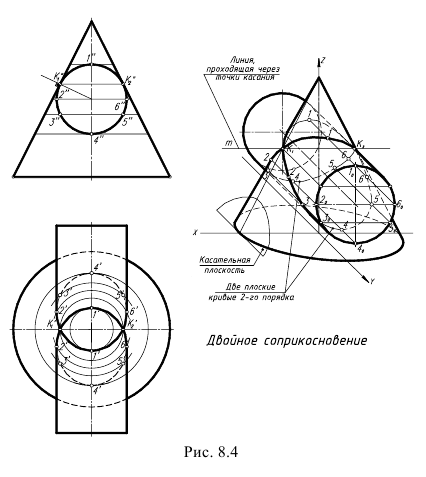
В этом случае поверхности имеют две точки соприкосновения K1 и K2 и линия их пересечения распадается на две плоские кривые в соответствии с теоремой 2 (С. А. Фролов «Начертательная геометрия» [23]): «Если две поверхности вращения второго порядка имеют касание в двух точках, то линия их пересечения распадается на две кривые второго порядка, плоскости которых проходят через прямую m, соединяющую точки касания» (поверхности имеют две общие касательные плоскости).
В зависимости от расположения пересекающихся геометрических тел относительно плоскостей проекций и участия в пересечении геометрических тел, имеющих проецирующую поверхность (как призма или цилиндр) или не имеющих проецирующей поверхности (пирамида, конус, шар, тор, тороид, наклонная призма или наклонный цилиндр, глобоид и др.), следует выбрать оптимальный способ построения проекций линии пересечения поверхностей на чертеже.
По этим признакам способы построения линий пересечения поверхностей можно объединить в две группы:
Первая группа: частные случаи пересечения поверхностей, когда для построения линий пересечения не требуется применения специальных способов, а используется частное положение пересекающихся геометрических тел относительно плоскостей проекций.
Вторая группа: общие случаи пересечения поверхностей, когда для построения линий пересечения требуется применить специальные способы посредников.
Частные случаи пересечения поверхностей
K первой группе частных случаев пересечения поверхностей относятся следующих четыре случая:
1-й случай: пересечение геометрических тел, боковые поверхности которых являются проецирующими, то есть, перпендикулярны какой-либо плоскости проекций.
2-й случай: пересечение геометрических тел, у одного из которых боковая поверхность является проецирующей.
3-й случай: пересечение соосных поверхностей вращения, т. е. имеющих общую ось вращения.
4-й случай: пересечение поверхностей вращения второго порядка, описанных вокруг сферы (по теореме Г. Монжа).
Рассмотрим на примерах построение проекций линий пересечения поверхностей геометрических тел в четырех частных случаях первой группы.
Следует отметить, что перечисленные частные случаи пересечения поверхностей наиболее часто встречаются при формообразовании различных реальных деталей.
1-й частный случай
На рис. 8.5 показан пример построения проекций линии пересечения поверхностей горизонтально-проецирующего цилиндра и фронтально-проецирующей прямой правильной треугольной призмы, то есть пересекаются два геометрических тела, боковые поверхности которых занимают относительно плоскостей проекций проецирующее положение.
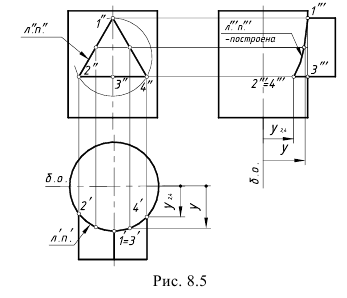
Характерный признак 1-го частного случая: на заданных проекциях тел определяются две проекции искомой линии пересечения:
– фронтальная проекция (л”п”) линии пересечения 1″-2″-3″-4″ совпадает с вырожденной в ломаную линию боковой поверхностью призмы;
– горизонтальная проекция (л’п’) линии пересечения 1′-2′-3′-4′ совпадает с участком окружности, которая является вырожденной проекцией боковой поверхности цилиндра.
Следовательно, требуется достроить только профильную проекцию (л'”п”‘) линии пересечения, построив профильные проекции обозначенных точек по их принадлежности одному из тел (в данной задаче – цилиндру), и соединить их плавной кривой с учетом ее видимости на поверхностях.
2-й частный случай
На рис. 8.6 показан пример построения проекций линии пересечения поверхностей прямого кругового конуса и фронтально-проецирующего цилиндра, то есть пересекающихся геометрических тел, у одного из которых боковая поверхность проецирующая.
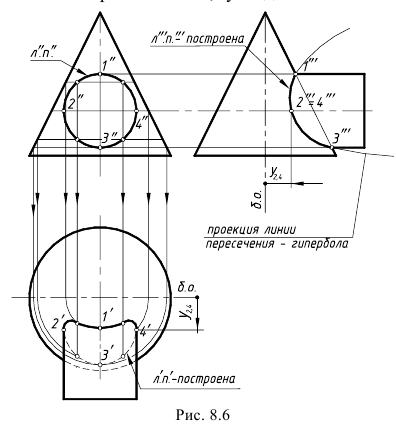
Характерный признак 2-го частного случая: на заданных проекциях тел определяется одна проекция линии пересечения:
– фронтальная проекция (л”п”) линии пересечения 1″-2″-3″-4″ совпадает с окружностью, которая является вырожденной проекцией боковой поверхности цилиндра.
Следовательно, требуется достроить горизонтальную (л’п’) и профильную (л”‘п”‘) проекции линии пересечения, построив горизонтальные и профильные проекции обозначенных точек по их принадлежности конусу, и соединить построенные на проекциях точки плавными кривыми линиями с учетом их видимости на поверхностях.
!!! На профильную проекцию предмета пространственная кривая линия пересечения 4-го порядка проецируется в виде участка гиперболы.
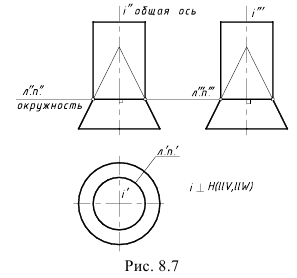
3-й частный случай
Пересечение соосных геометрических тел. Соосными называются геометрические тела вращения, имеющие общую ось вращения «i». Поверхности соосных тел пересекаются по окружностям, перпендикулярным их общей оси. Если общая ось «i» соосных геометрических тел является прямой проецирующей (т. е. она перпендикулярна какой-либо одной плоскости проекций, а двум другим параллельна), то окружность пересечения проецируется дважды в прямую линию, перпендикулярную их общей оси, на те плоскости проекций, которым эта общая ось параллельна.
На рис. 8.7 показан пример построения линии пересечения соосных геометрических тел – конуса и горизонтально-проецирующего цилиндра, имеющих общую горизонтально-проецирующую ось i (ось перпендикулярна H и параллельна V и W). Линией пересечения является окружность, фронтальная (л”п”) и профильная (л”‘п”‘) проекции которой представляют собой прямые линии, перпендикулярные их общей оси i и проходящие через точки пересечения фронтальных и профильных очерков поверхностей. Горизонтальная проекция этой окружности пересечения л’п’) совпадает с вырожденной горизонтальной проекцией боковой поверхности цилиндра.
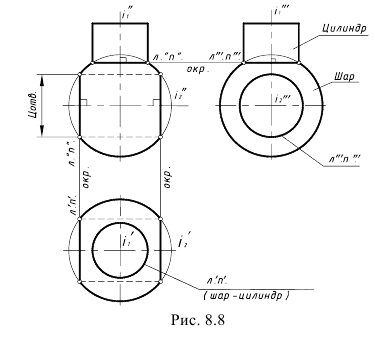
На рис. 8.8 показан пример построения линий пересечения двух пар соосных поверхностей:
– поверхности шара и горизонтально-проецирующего цилиндра, соосных относительно горизонтально-проецирующей оси i1, окружности пересечения которых проецируются в прямые линии на фронтальную и профильную проекции;
– поверхности шара и сквозного профильно-проецирующего цилиндрического отверстия Цотв в шаре, соосных относительно профильно-проецирующей оси i2, окружности пересечения которых проецируются в прямые линии на фронтальную и горизонтальную проекции.
4-й частный случай
Пересечение поверхностей вращения второго порядка, описанных вокруг сферы (по теореме Г. Монжа).
Напоминаем, к поверхностям вращения второго порядка относятся круговые цилиндр и конус, шар, эллипсоиды, параболоид и одно-, двуполостные гиперболоиды.
Эллиптические цилиндры и конусы, а также наклонный круговой конус – это не поверхности вращения!
Все торы (открытый, закрытый и самопересекающийся), глобоиды и тороиды относятся к поверхностям вращения четвертого порядка!
В 4-м частном случае имеет место двойное соприкосновение пересекающихся поверхностей вращения второго порядка, описанных вокруг сферы, и построение линии пересечения основано на теореме 2 (С. А. Фролов «Начертательная геометрия» [23]):
Теорема 3, известная как теорема Г. Монжа, вытекает из теоремы 2: «Если две поверхности вращения второго порядка описаны вокруг третьей поверхности второго порядка или вписаны в нее, то линия их пересечения распадается на две кривые второго порядка, плоскости которых проходят через прямую, соединяющую точки касания».
Практическое применение теоремы возможно в том случае, когда две поверхности вращения второго порядка описаны вокруг сферы или вписаны в нее.
Использовать теорему Г. Монжа для построения на чертеже линии пересечения поверхностей можно при наличии в задаче четырех обязательных графических условий:
- Пересекаются поверхности вращения второго порядка.
- Оси поверхностей вращения должны пересекаться (точка пересечения – центр вписанной сферы).
- Поверхности описаны вокруг общей сферы или вписаны в нее.
- Общая плоскость симметрии, проходящая через оси поверхностей, является плоскостью уровня.
При соблюдении этих четырех условий на одной из заданных проекций можно построить проекции двух плоских кривых, на которые распадается искомая линия пересечения:
- – плоские кривые проецируются в отрезки прямых линий на ту проекцию предмета, которая расположена на плоскости проекций, параллельной общей плоскости симметрии поверхностей;
- – точки пересечения очерков поверхностей на этой проекции принадлежат искомой линии пересечения и через эти точки проходят прямые, в которые проецируются плоские кривые пресечения;
- – прямые, как проекции плоских кривых, пересекаются в точке, с которой совпадают проекции двух точек K1≡K2 соприкосновения поверхностей и соответственно проекция прямой m(m’, m”), соединяющей эти точки соприкосновения (точки касания).
!!! Точки касания (соприкосновения) поверхностей K1(K1“) и K2(K2“) определяются на пересечении проекций окружностей касания вписанной сферы с каждой из поверхностей.
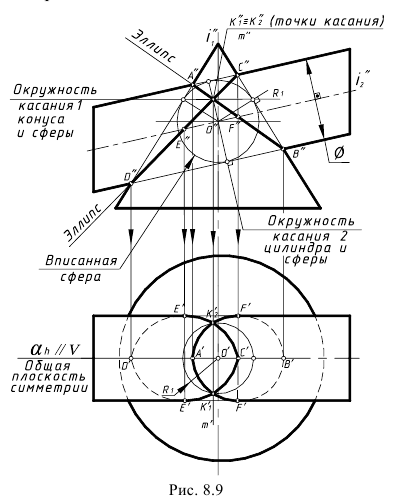
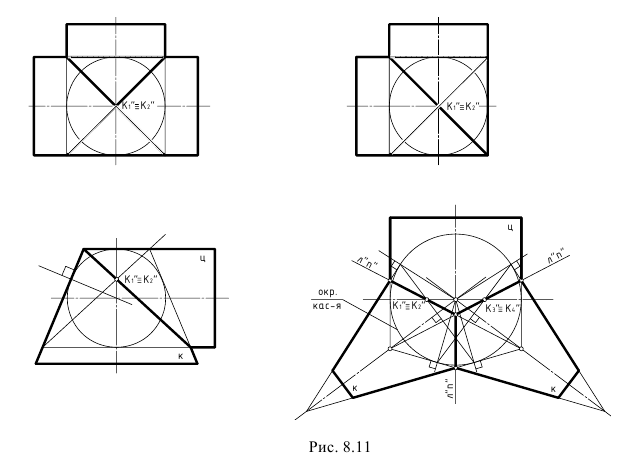
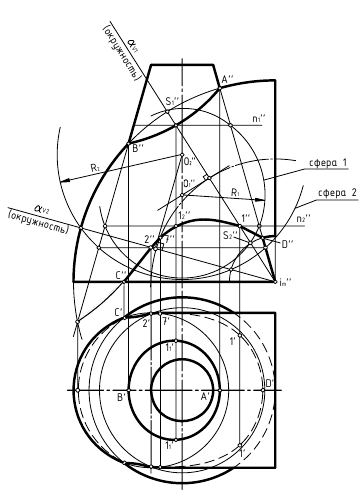
На рис. 8.9 показан пример построения проекций линии пересечения поверхностей вращения второго порядка – прямого кругового конуса и наклонного кругового цилиндра, описанных вокруг общей сферы. Для решения задачи использована теорема Г. Монжа, поскольку здесь соблюдены все четыре обязательных условия ее применения:
- Пересекаются прямой круговой конус и круговой наклонный цилиндр, т. е. поверхности вращения второго порядка.
- Оси конуса и цилиндра пересекаются в точке O(O”).
- Обе поверхности описаны вокруг общей для них сферы с центром точке O(O”).
- Общая плоскость симметрии поверхностей α(αH) является фронтальной плоскостью уровня (//V).
Построение проекций линии пересечения поверхностей по теореме Г. Монжа выполняется по следующему графическому алгоритму:
1-е действие. Определить проекцию предмета, на которую плоские кривые проецируются в отрезки прямых линий: в данной задаче это фронтальная проекция, так как общая плоскость симметрии α(αН) параллельна фронтальной плоскости проекций V.
2-е действие. Построить фронтальные совпадающие проекции K1≡K2 точек соприкосновения заданных поверхностей, лежащих на пересечении проекций окружностей касания вписанной сферы с каждой из поверхностей (прямые линии – проекций этих окружностей касания – строятся как линии пересечения соосных поверхностей, так как вписанная сфера образует две пары соосных поверхностей – конус/сфера с общей осью i1 и цилиндр/сфера с общей осью i2. На чертеже проекции этих окружностей касания проходят через точки, полученные на пересечении перпендикуляров, проведенных из точки О(О”) – центра вписанной сферы – к образующим конуса (окружность касания 1) и цилиндра (окружность касания 2).
3-е действие. Отметить на фронтальной проекции точки A(A”), B(B”), C(C”) и D(D”) пересечения очерков поверхностей и построить фронтальные проекции плоских кривых пересечения 2-го порядка, соединив прямыми линиями A-B(A”-B”) и C-D(C”-D”) противоположные точки пересечения очерков (обе прямые обязательно должны пройти через построенные проекции точек соприкосновения поверхностей K1≡K2 (K”1≡K”2);
4-е действие. Построить горизонтальные проекции двух плоских кривых пересечения – эллипсов, по горизонтальным проекциях обозначенных точек A, B, C, D, K1 и K2, построенных по принадлежности поверхности конуса; обозначить и построить точки E(E’) и F(F’), которые лежат на очерковых образующих горизонтальной проекции цилиндра и определяют границу видимости кривых на горизонтальной проекции предмета, а также отметить и построить необходимое количество промежуточных точек (здесь не обозначены).
5-е действие. Оформить фронтальный и горизонтальный очерки пресекающихся поверхностей.
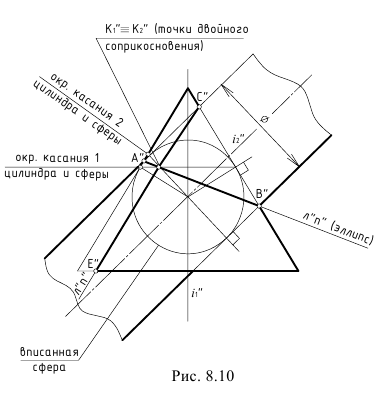
!!! Построение точек соприкосновения K1≡K2 поверхностей особенно важно в задачах, где по условию нельзя определить одну из четырех точек пересечения очерков поверхностей. Совпадающие проекции точек соприкосновения в этом случае определят направление одной из двух прямых линий – проекций плоских кривых пересечения (рис. 8.10). В данном случае проекция плоской кривой линии пересечения CE проведена через точки C и K1≡K2. Точка E определяется на основании конуса.
На рис. 8.11 показаны примеры построения линий пересечения поверхностей второго порядка, описанных вокруг сферы, с применением теоремы Г. Монжа. Они часто встречаются при конструировании различных переходов цилиндрических и конических труб, или пересечений отверстий в деталях.
Общие случаи пересечения поверхностей и способы построения линий пересечения поверхностей
Ко второй рассматриваемой группе относятся общие случаи пересечения геометрических тел, боковые поверхности которых могут занимать относительно плоскостей проекций непроецирующее положение (это наклонные призмы и цилиндры), а также геометрические тела, поверхности которых непроецирующие – это конус, сфера, торы, глобоид, эллипсоид, параболоид и гиперболоиды. Сюда же относятся наклонный эллиптический цилиндр, имеющий круговые сечения, и наклонный круговой конус.
Для построения линий пересечения поверхностей в этом случае применяются специальные способы вспомогательных посредников – плоскостей уровня или поверхностей (сфер, цилиндров, конусов), из которых мы рассматриваем следующие:
- способ вспомогательных секущих плоскостей уровня;
- способ вспомогательных концентрических сфер;
- способ вспомогательных эксцентрических сфер.
Применение одного из указанных способов для построения линий пересечения поверхностей геометрических тел возможно при наличии некоторых обязательных графических условий расположения геометрических тел относительно плоскостей проекций и зависит от того, какие именно геометрические тела пересекаются в конкретной задаче.
Линия пересечения поверхностей является общей для обеих поверхностей и образуется множеством общих точек, которые строятся с помощью вспомогательных посредников.
Предварительно требуется выполнить графический анализ условия задачи для выбора рационального способа ее решения, определить проекцию предмета, на которой следует начинать решение задачи, и границы введения посредников.
Для построения проекций точек, принадлежащих линии пересечения поверхностей, способом посредников следует применять общий для всех рассматриваемых способов графический алгоритм.
Графический алгоритм I:
1-е действие. Ввести вспомогательную плоскость или поверхность-посредник.
2-е действие. Построить вспомогательные линии пересечения плоскости – или поверхности-посредника с каждой из заданных поверхностей.
3-е действие. Определить точки пересечения построенных вспомогательных линий пересечения – эти точки принадлежат искомой линии пересечения.
Рассмотрим на примерах применение различных способов вспомогательных посредников для построения проекций линий пересечения поверхностей.
Способ вспомогательных секущих плоскостей уровня
Применение способа вспомогательных секущих плоскостей рационально при наличии двух графических условий:
1. Общая плоскость симметрии пересекающихся геометрических тел является плоскостью уровня; при соблюдении этого условия точки пересечения очерков поверхностей принадлежат искомой линии пересечения и определяют верхнюю и нижнюю границу введения плоскостей-посредников на соответствующей проекции предмета.
2. Сечениями геометрических тел в одной из плоскостей уровня должны быть простые в построении линии пересечения – прямые линии (образующие) или окружности; эту плоскость уровня и следует выбрать в качестве посредника.
На рис. 8.12 показан пример построения проекций линии пересечения прямого конуса и половины шара.
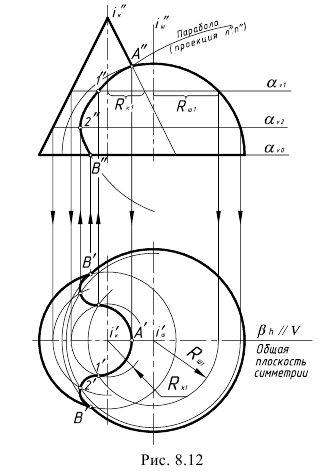
Для решения задачи требуется предварительно выполнить графический анализ заданных проекций предмета:
А. Выбираем для решения задачи способ вспомогательных секущих плоскостей, так как здесь соблюдены два графических условия его применения:
– общая плоскость симметрии β(βН) геометрических тел – конуса и полушара – является фронтальной плоскостью уровня (первое условие применения);
– горизонтальные плоскости уровня, которые пересекают поверхности конуса и полушара по окружностям, выбираем в качестве вспомогательных плоскостей-посредников (второе условие применения).
Б. Решение задачи, то есть введение плоскостей-посредников, начинаем на фронтальной проекции предмета, так как общая плоскость симметрии геометрических тел является фронтальной плоскостью уровня.
В. Определяем границы введения плоскостей-посредников – это точка А(А”) пересечения фронтальных очерков и точки B(B’,B”) пересечения окружностей оснований конуса и полушара, лежащие в горизонтальной плоскости уровня α(αVо).
Построить проекции точек искомой линии пересечения, выполнив действия предложенного графического алгоритма I:
1-е действие. Ввести на фронтальной проекции предмета первую вспомогательную секущую горизонтальную плоскость-посредник α(αV1) произвольно и ниже точки А(А”).
2-е действие. Построить на горизонтальной проекции предмета вспомогательные окружности радиусами Rк1 и Rш1, по которым секущая плоскость-посредник α(αV1) пересекает поверхности конуса и шара.
3-е действие. Определить на пересечении построенных вспомогательных окружностей горизонтальные проекции точек 1(1′), принадлежащих линии пересечения; фронтальные совпадающие проекции 1(1″) этих точек определяются по линии связи на фронтальной проекции плоскости-посредника α(αV1).
3.1. Повторить действия основного графического алгоритма, введя вторую плоскость-посредник α2(αV2), и построить проекции точек 2(2′,2″) и т. д.
Дополнительные действия:
4-е действие. Соединить проекции построенных точек на фронтальной и горизонтальной проекциях предмета плавными кривыми линиями с учетом их видимости на проекциях: на фронтальную проекцию предмета пространственная кривая пересечения проецируется в видимую плоскую кривую второго порядка (участок параболы), поскольку горизонтальная проекция предмета имеет фронтальную симметрию; на горизонтальную проекцию предмета – в участок видимой кривой 4-го порядка сложной формы.
5-е действие. Оформить очерки поверхностей на заданных проекциях предмета с учетом их относительной видимости:
- – на фронтальной проекции – очерк конуса существует влево от точки А(А”), а очерк шара вправо от точки А(А”) (несуществующие очерки конуса и шара оставить тонкими линиями);
- – на горизонтальной проекции – окружность основания конуса существует влево от точек В(B’), а окружность основания шара существует вправо от точек В(B’) (несуществующие части окружностей оснований конуса и шара оставить тонкими линиями).
!!! Способ вспомогательных секущих плоскостей позволяет строить одновременно две проекции искомой линии пересечения.
Способ вспомогательных концентрических сфер
Основанием для применения сферы в качестве вспомогательной поверхности-посредника являются две ее характерные особенности:
- – в сфере можно провести через ее центр бесконечное количество осей;
- – сфера может быть соосна любой поверхности вращения; соосные поверхности пересекаются по окружностям, проекции которых легко построить (см. рис. 8.7 и 8.8).
Сфера-посредник образует две пары соосных поверхностей с каждой из заданных поверхностей. Каждая образованная пара соосных поверхностей пересекается по соответствующим окружностям, которые проецируются в прямые, перпендикулярные общей оси каждой пары, и проходят через точки пересечения очерков каждой пары соосных поверхностей.
Применение способа вспомогательных концентрических сфер для построения линии пересечения поверхностей возможно при наличии трех следующих графических условий:
- Пересекаются поверхности вращения (кроме открытого и закрытого тора).
- Общая плоскость симметрии пересекающихся поверхностей является плоскостью уровня; при этом условии точки пересечения очерков на проекции предмета, изображенного на параллельной общей плоскости симметрии плоскости проекций, принадлежат искомой линии пересечения.
- Оси поверхностей пересекаются; точка пересечения осей является центром всех вспомогательных сфер.
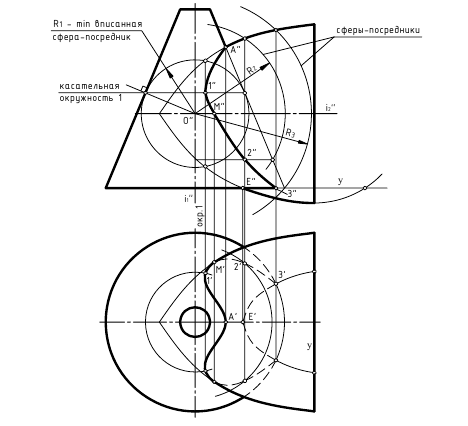
На рис. 8.13 показан пример построения проекций линии пересечения усеченного конуса и тороида (самопересекающийся тор).
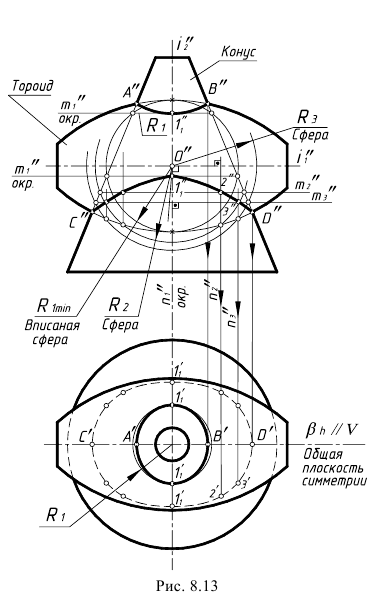
Рассмотренный способ вспомогательных секущих плоскостей здесь применять не следует, так как ни одна плоскость уровня не пересекает поверхности одновременно по окружностям (одно из условия применения).
Для решения задачи требуется предварительно выполнить графический анализ заданных проекций предмета.
А. Выбираем для решения задачи способ вспомогательных концентрических сфер, так как здесь соблюдены три графических условия его применения:
- – пересекаются поверхности вращения – прямой круговой конус и тороид (самопересекающийся тор);
- – общая плоскость симметрии геометрических тел β(βН) является фронтальной плоскостью уровня;
- – оси поверхностей пересекаются в точке O(O”) – центр всех вспомогательных сфер.
Б. Решение задачи, то есть введение вспомогательных сфер-посредников начинаем на фронтальной проекции предмета, так как общая плоскость симметрии является фронтальной плоскостью уровня и точки A(A”), B(B”), C(C”) и D(D”) пересечения фронтальных очерков принадлежат линии пересечения.
В. Определяем границы введения сфер – это точки C(C”) и D(D”) пересечения фронтальных очерков пересекающихся геометрических тел. Построить проекции точек линии пересечения, выполнив действия предложенного графического алгоритма I.
1-е действие. Ввести на фронтальной проекции вспомогательную сферу-посредник минимального радиуса R1min, с центром в точке O(O”), вписанную в тороид (минимальная сфера-посредник должна вписываться в одну из поверхностей, а с другой поверхностью – пересекаться).
2-е действие. Построить проекции вспомогательных окружностей пересечения двух пар соосных поверхностей, образованных сферой-посредником с каждой заданной поверхностью:
- – первая пара соосных поверхностей – сфера-посредник и тороид – имеют горизонтальную общую ось i1” и пересекаются по окружности касания n1“, которая проецируется в прямую линию (совпадает с осью конуса);
- – вторая пара соосных поверхностей – сфера-посредник и конус имеют вертикальную общую ось вращения i2” и пересекаются по двум вспомогательным окружностям m1“, которые проецируются в прямые линии;
3-е действие. Определить точки 1(11“) пересечения построенных проекций вспомогательных окружностей m1” и n1“, которые принадлежат искомым линиям пересечения (по две пары совпадающих точек).
!!! Здесь имеет место случай полного проницания (II случай), и линия пересечения распадается на две замкнутые кривые.
Дополнительные действия:
4-е действие. Повторить действия основного графического алгоритма, введя вспомогательные сферы большего радиуса R2 и R3 с тем же центром в точке О(О”), и построить следующие пары точек 2(2″) и 3(3″).
4.1. Достроить горизонтальные проекции построенных точек линии пересечения по принадлежности параллелям конуса.
4.2. Соединить проекции построенных точек на фронтальной и горизонтальной проекциях предмета плавными кривыми линиями с учетом их видимости на проекциях (только линия пересечения D’-3′-2′-11‘-C’ будет невидимой на горизонтальной проекции предмета).
5-е действие. Оформить очерки поверхностей на заданных проекциях предмета с учетом их относительной видимости.
Способ вспомогательных эксцентрических сфер
Наименование способа говорит о том, что вспомогательные сферы имеют разные центры, которые и нужно определять в процессе построения проекций линии пересечения поверхностей.
Способ вспомогательных эксцентрических сфер для построения линии пересечения поверхностей возможно применять при наличии трех следующих графических условий:
1. Пересекаются:
- – поверхности вращения 4-го порядка, т. е. торовые поверхности – открытый или закрытый тор;
- – поверхности эллиптических цилиндра и конуса, имеющие круговые сечения.
2. Общая плоскость симметрии поверхностей является плоскостью уровня.
3. Оси поверхностей пересекаются или скрещиваются.
Поскольку в этом способе центр каждой вспомогательной сферы нужно определять графическими построениями, первое действие графического алгоритма для построения проекций точек линии пересечения дополняется построением центра каждой вспомогательной сферы.
Порядок графических действий для построения линий пересечения способом вспомогательных эксцентрических сфер показан на двух примерах.
На рис. 8.14 показан пример построения проекции линии пересечения профильно-проецирующего цилиндра с поверхностью четвертой части открытого тора. Задача решается способом вспомогательных эксцентрических сфер, так как здесь соблюдены три необходимых условия для применения этого способа:
- – одна из пересекающихся поверхностей – открытый тор, имеющий круговые сечения во фронтально-проецирующих плоскостях, проходящих через его ось вращения i”m;
- – общая плоскость симметрии поверхностей – фронтальная плоскость уровня (подразумевается), поэтому точка A(A”) пересечения фронтальных очерков принадлежит искомой линии пересечения;
- – оси поверхностей iц и im скрещиваются.
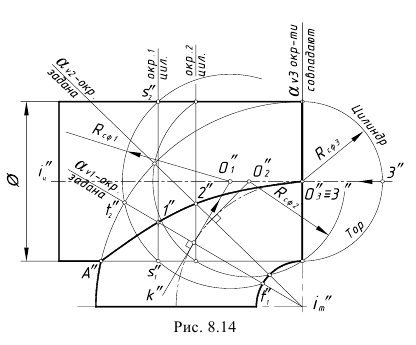
Построение проекций точек линии пересечения поверхностей выполняется на заданной фронтальной проекции предмета по предлагаемому графическому алгоритму II.
Графический алгоритм II.
1-е действие. Ввести вспомогательную сферу, выполнив предварительно следующие графические действия.
1.1. Задать произвольное круговое сечение поверхности тора фронтально-проецирующей плоскостью αV1, проходящей через его ось i”m; окружность t1-t2, (ее проекция – прямая линия t”1-t”2) – это заданная линия пересечения тора с искомой вспомогательной сферой, центр которой должен лежать на перпендикуляре к проекции этой окружности – прямой t”1-t”2 (хорда окружности, в которую проецируется вспомогательная сфера).
1.2. Провести к прямой t”1-t”2 через ее середину перпендикуляр k” и на его пересечении с осью цилиндра i”ц определить центр первой вспомогательной сферы – точку O”1.
1.3. Провести окружность – проекцию вспомогательной сферы-посредника – с центром в точке O”1, радиус которой Rсф.1 определяется расстоянием от точки О”1 до одной из крайних точек t”1 или t”2 прямой t”1-t”2.
2-е действие. Построить проекцию окружности пересечения построенной сферы-посредника с поверхностью соосного ей цилиндра – это прямая s”1-s”2, проходящая через точки s”1 и s”2 пересечения очерков цилиндра и сферы-посредника.
3-е действие. Определить на пересечении построенных проекций заданной окружности t”1-t”2 и построенной окружности s”1-s”2 совпадающие точки 1(1″), принадлежащие искомой линии пересечения заданных поверхностей.
Дополнительные действия:
4-е действие. Повторить действия графического алгоритма и построить достаточное количество точек линии пересечения. В данном примере дополнительными сечениями вспомогательных плоскостей αV2 и αV3 и вспомогательными сферами Rсф.2 и Rсф.3 с центрами O2 и O3 построены точки 2 и 3, принадлежащие линии пересечения. Причем в плоскости αV3 окружности сечений совпадают и совпадающие точки 3 делят существование этих окружностей на две половины – верхняя часть принадлежит цилиндру, а нижняя – тору.
5-е действие. Соединить на фронтальной проекции точки A”-1″-2″-3″ линии пересечения плавной видимой кривой.
6-е действие. Оформить очерки поверхностей на заданной проекции.
На рис. 8.15 показан пример построения линии пересечения наклонного кругового цилиндра Ц1 с осью i”1 и наклонного эллиптического цилиндра с осью i”2, у которого есть круговые сечения в горизонтальных плоскостях уровня.
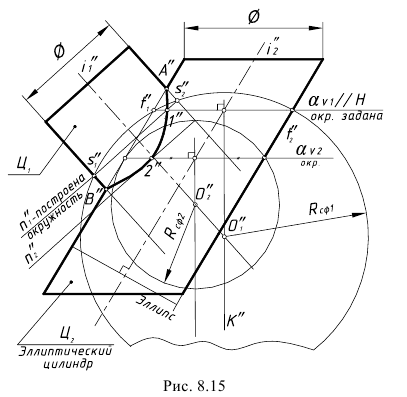
Выполнить графический анализ условия и исключить нерациональный способ решения задачи.
Рассмотренный способ вспомогательных секущих плоскостей применять не следует, так как на заданной фронтальной проекции ни одна плоскость уровня не пересекает поверхности одновременно по окружностям или образующим (одно из условий применения).
Рассмотренный способ вспомогательных концентрических сфер применять нельзя, так как проведенные сферы с центром в точке пересечения осей образуют соосные пары только с одной заданной поверхностью Ц1 (одно из условий применения).
Выбираем для решения задачи способ вспомогательных эксцентрических сфер, так как здесь соблюдены три условия его применения:
- – пересекаются наклонный круговой цилиндр Ц1 и эллиптический цилиндр Ц2 (поверхность не вращения);
- – общая плоскость симметрии поверхностей является фронтальной плоскостью уровня (подразумевается);
- – оси поверхностей i1 и i2 – пересекаются.
Решение задачи, то есть введение сечений цилиндра Ц2 (параллельных заданному) горизонтальными плоскостями уровня α, начинаем на фронтальной проекции предмета, так как общая плоскость симметрии является фронтальной плоскостью уровня и точки A(A”) и B(B”) пересечения фронтальных очерков принадлежат линии пересечения.
Определяем границы введения сечений цилиндра Ц2 – это точки A(A”) и B(B”) пересечения фронтальных очерков пересекающихся геометрических тел.
Построить проекции точек линии пересечения поверхностей, выполнив действия предложенного графического алгоритма II.
Графический алгоритм II.
1-е действие. Ввести вспомогательную сферу, выполнив предварительные графические действия.
1.1. Задать произвольное круговое сечение эллиптического цилиндра Ц2 горизонтальной плоскостью αV1 – прямую t1-t2. Эта заданная линия t1-t2 – окружность пересечения эллиптического цилиндра с искомой вспомогательной сферой, центр которой лежит на перпендикуляре, проведенном из середины этой прямой.
1.2. Провести к прямой t1-t1 через ее середину перпендикуляр k” и на пересечении с осью i1 кругового цилиндра Ц1 определить точку О1 – центр первой вспомогательной сферы-посредника.
1.3. Провести окружность сферы-посредника радиусом Rсф.1, который определяется расстоянием от точки О”1 до одной из точек t”1 или t”2 прямой t1-t2.
2-е действие. Построить проекцию окружности пересечения сферы посредника с соосной ей поверхностью кругового цилиндра Ц1 – это прямая s1-s2, проходящая через точки пересечения очерков сферы и цилиндра.
3-е действие. Определить на пересечении заданной окружности t1“-t2” и построенной окружности s1“-s2” совпадающие точки 1(1″), принадлежащие искомой линии пересечения.
Дополнительные действия.
4-е действие. Повторить действия графического алгоритма II и построить проекции точек 2(2″);
5-е действие. Соединить на фронтальной проекции точки А”-1″-2″-B” линии пересечения плавной видимой кривой.
6-е действие. Оформить очерки поверхностей на заданной проекции.
Структуризация материала восьмой лекции в рассмотренном объеме схематически представлена на рис. 8.16 (лист 1). На последующих листах 2–5 приведены иллюстрации к этой схеме для быстрого визуального закрепления изученного материала при повторении (рис. 8.17–8.20).
Пересечение поверхностей:
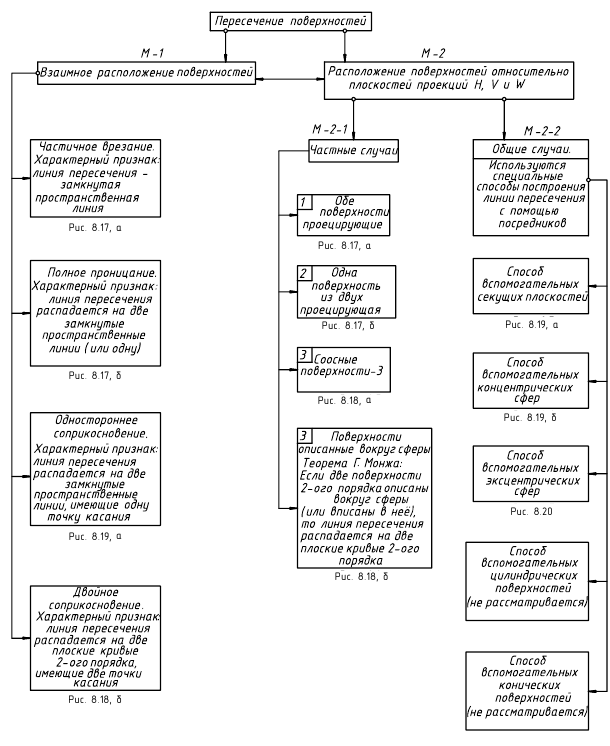
Частный случай 1. Обе пересекающиеся поверхности проецирующие
Частный случай 2. Одна из двух пересекающихся поверхностей проецирующая
Частный случай 3. Соосные поверхности вращения (с общей осью i)
Частный случай 4. Пересечение поверхностей вращения 2-го порядка, описанных вокруг сферы
Общие случаи пересечения поверхностей:
1. Способ вспомогательных секущих плоскостей
а. Одностороннее касание (две замкнутые пространственные линии пересечения касаются в одной точке К)
Графический алгоритм:
- Ввести плоскость-посредник (горизонтальная плоскость α/αV3).
- Построить линии пересечения плоскости-посредника с каждой поверхностью (окружности радиусом R3К и R3m).
- Определить точки (3), принадлежащие искомой линии пересечения (на пересечении построенных окружностей радиусами R3К и R3m).
- Повторить алгоритм необходимое число раз.
- Способ вспомогательных концентрических сфер
б. Частичное врезание (линия пересечения – замкнутая пространственная линия)
Графический алгоритм:
- Ввести сферу-посредник (R1min минимальная вписанная сфера-посредник)
- Построить линии пересечения сферы-посредника с каждой поверхностью (касательная окр.1 и окр.1, пересечение соосных поверхностей)
- Определить точки 1, принадлежащие искомой линии пересечения (на пересечении построенных проекций окружностей 1)
- Повторить алгоритм необходимое число раз, увеличивая радиусы сфер-посредников
- Способ вспомогательных эксцентрических сфер
в. Полное проницание (линия пересечения распадается на две замкнутые пространственные линии)
Графический алгоритм:
I. Предварительные действия для определения центра вспомогательной сферы-посредника
1. Задать проекцию окружности (прямая S1-S2), по которой вспомогательная плоскость α/αV1) пересекает поверхность открытого тора.
2. Провести через середину этой проекции перпендикуляр к ней до пересечения с осью конуса – на пересечении определяется центр первой сферы-посредника О1(О”).
II. Основные действия
3. Ввести сферу-посредник радиусом R1 с центром в т. О1(О1“).
4. Построить линии пересечения сферы-посредника с каждой поверхностью (заданная окружность S1 -S2 и две построенные окружности n1 и n2).
5. Определить точки 11” и 12”, принадлежащие искомой линии пересечения (на пересечении линий S1 -S2 (S1“-S2“) и n1” и n2”.
Образец взаимного пересечения поверхностей
Линия пересечения двух поверхностей – это геометрическое место точек, принадлежащих одновременно обеим поверхностям.
Общим способом построения точек, принадлежащих кривой взаимного пересечения поверхностей, является способ вспомогательных поверхностей посредников. Этот способ заключается в следующем.
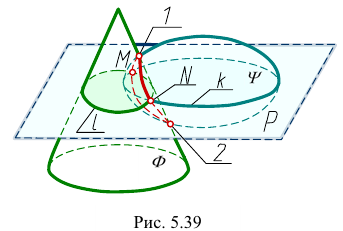
Пусть даны некоторые взаимно пересекающиеся поверхности  (рис. 5.39).
(рис. 5.39).
Введем плоскость-посредник Р, которая пересечет поверхности по линиям  Пересечение линий даст точки
Пересечение линий даст точки  принадлежащие кривой пересечения. Применяя ряд посредников, получаем семейство точек линии пересечения. В качестве посредников наиболее часто применяют плоскости и шаровые поверхности – сферы. В зависимости от вида поверхностей посредников можно выделить следующие способы построения линии пересечения двух поверхностей:
принадлежащие кривой пересечения. Применяя ряд посредников, получаем семейство точек линии пересечения. В качестве посредников наиболее часто применяют плоскости и шаровые поверхности – сферы. В зависимости от вида поверхностей посредников можно выделить следующие способы построения линии пересечения двух поверхностей:
- а) способ вспомогательных секущих плоскостей;
- б) способ вспомогательных сфер.
При построении линии взаимного пересечения поверхностей необходимо сначала строить опорные точки кривой. Эти точки дают пределы линии пересечения. Между ними и следует определять промежуточные (случайные) точки.
- Собственные тени поверхностей вращения
- Построение падающих теней
- Проекции с числовыми отметкам
- Гранные поверхности
- Тени в ортогональных проекциях
- Кривые поверхности
- Пересечения криволинейных поверхностей
- Пересечения поверхностей с прямой и плоскостью
Лекция 9 ПЕРЕСЕЧЕНИЕ ПОВЕРХНОСТЕЙ
Вопросы:
1.Взаимное пересечение кривых поверхностей
2.Особые случаи пересечения поверхностей
|
3. |
Пересечение |
кривой |
поверхности |
с |
поверхностью |
|
многогранника |
4.Пересечение многогранников
1 ВЗАИМНОЕ ПЕРЕСЕЧЕНИЕ КРИВЫХ ПОВЕРХНОСТЕЙ
1.1 Общие положения
Кривые поверхности пересекаются в общем случае по пространственной кривой линии, проекции которой строятся обычно по точкам. Для нахождения этих точек заданные поверхности пересекают третьей вспомогательной секущей поверхностью, определяют линии пересечения вспомогательной поверхности с каждой из заданных, затем находят общие точки построенных линий пересечения. Повторяя такие построения многократно, получают необходимое количество точек для определения линии пересечения.
Общий алгоритм построения линии пересечения поверхностей:
1) Выбирают вид вспомогательных поверхностей. При выборе вспомогательной секущей поверхности следует выбирать поверхности, которые пересекали бы заданные поверхности по наиболее п ростым для построения линиям – прямым или окружностям. В качестве вспомогательных поверхностей – посредников наиболее часто используют плоскости и сферы.
2) Строят линии пересечения вспомогательных поверхностей с заданными поверхностями.
3)Находят точки пересечения полученных линий и соединяют их между собой.
4)Определяют видимость линии пересечения относительно рассматриваемых поверхностей и плоскостей проекций.
Построения начинают с определения характерных (опорных) точек (точки, расположенные на очерковых образующих поверхностей, которые обычно делят линию пересечения на видимую и невидимую части (границы видимости), высшая и низшая точки линии пересечения, крайние точки (правая и левая).
При построениях применяют способы преобразования чертежа, если это упрощает и утоняет построения.
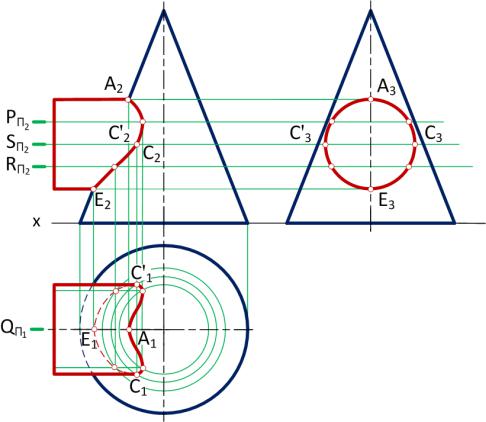
1.2 Построение линии пересечения поверхностей с помощью вспомогательных секущих плоскостей
Задача. Построить линию пересечения конуса и цилиндра вращения (рис. 186).
В первую очередь определяем характерные точки линии пересечения:
– Проекции высшей и низшей точек А2 и E2 определены при помощи вспомогательной фронтальной плоскости Q, которая пересекает поверхность цилиндра и конуса по крайним образующим. Горизонтальные проекции точек находятся на горизонтальном следе Qπ2 вспомогательной плоскости.
– Точки С и С найдены при помощи горизонтальной плоскости S, проведенной через ось цилиндра. Плоскость S пересекает поверхность цилиндра по крайним образующим (передней и задней), а поверхность конуса — по окружности. Пересечения горизонтальных проекций крайних образующих и окружности дают точки С 1 и С1 — горизонтальные проекции точек С и С . Фронтальные проекции этих точек лежат на фронтальном следе плоскости S .
Промежуточные точки линии пересечения найдены при помощи горизонтальных плоскостей Р и R.
Рисунок 186

Рисунок 187
В рассмотренном примере точки линии пересечения найдены при помощи вспомогательных плоскостей частного положения. Иногда же введение плоскостей частного положения не дает желаемого эффекта и целесообразнее воспользоваться плоскостями общего положения.
1.3 Построение линии пересечения поверхностей с помощью вспомогательных секущих сфер с постоянным центром
Известно, что если ось поверхности вращения проходит через
центр сферы и сфера пересекает эту поверхность, то линия пересечения сферы и поверхности вращения – окружность, плоскость которой перпендикулярна оси поверхности вращения. При этом если ось поверхности вращения параллельна плоскости проекций, то линия пересечения на эту плоскость проецируется в отрезок прямой линии.
На рис. 187 показана фронтальная проекция пересечения сферы радиуса R и поверхностей вращения – конуса, тора, цилиндра, сферы, оси которых проходят через центр сферы
радиуса R и параллельны плоскости π2. Окружности, по которым пересекаются указанные поверхности вращения с поверхностью сферы, проецируются на плоскость в виде отрезков прямых. Это свойство используют для построения линии взаимного пересечения двух поверхностей вращения с помощью вспомогательных сфер.
Способ секущих сфер с постоянным центром применяют при следующих условиях:
1)обе поверхности являются поверхностями вращения;
2)обе поверхности вращения пересекаются; точку пересечения принимают за центр вспомогательных (концентрических) сфер;
3)плоскость, образованная осями поверхностей (плоскость симметрии), должна быть параллельна плоскости проекций. В том случае, если это условие не соблюдается, прибегают к способам преобразования чертежа.

Сфера радиуса (Rmin)
Рисунок 188
Пример. Построить линию пересечения конуса вращения и цилиндра вращения (рис. 188).
Оси заданных поверхностей вращения пересекаются (точка О) и параллельны плоскости проекций π2, следовательно, необходимые для применения способа сфер условия имеются.
Определяем фронтальные проекции опорных точки 12 и 22 как точки пересечения фронтальных проекций очерков цилиндра и конуса. Горизонтальные проекции этих точек определяем при помощи линий проекционной связи.
Далее из центра пересечения цилиндра и конуса проводим ряд концентрических окружностей, являющихся фронтальными проекциями вспомогательных сфер.
Радиус сферы максимального радиуса (Rmax)
равен расстоянию от фронтальной проекции центра сфер O2 до наиболее удаленной точки проекции точки пересечения очерков (точка 12).
минимального
– это сфера, которая может быть вписана в одно геометрическое тело и пересекающая другое.
Сфера минимального радиуса только касается поверхности конуса и, следовательно, пересекает ее но окружности, фронтальная проекция которой — прямая A2B2. Поверхность цилиндра
сфера Rmin пересекает также по окружности, фронтальная проекция которой — прямая C2D2. Пересечение этих прямых — точка 42 есть фронтальная проекция одной из точек искомой линии пересечения.
Аналогичным образом при помощи сферы промежуточного радиуса Ri построена фронтальная проекция 32 еще одной точки, принадлежащей линии пересечения. Горизонтальные проекции найденных точек могут быть построены как проекции точек, лежащих на поверхности конуса.

2 ОСОБЫЕ СЛУЧАИ ПЕРЕСЕЧЕНИЯ ПОВЕРХНОСТЕЙ
1 Соосные поверхности вращения
Соосные поверхности вращения пересекаются по окружности, так линиями пересечения конуса и цилиндра (рис. 189) являются две окружности, которые проецируются на горизонтальную плоскость в натуральную величину, а на плоскость π2 – в отрезки прямых.
Рисунок 189
2 Пересечение поверхностей, описанных вокруг одной сферы
Как отмечалось ранее, линия пересечения двух кривых поверхностей в общем случае представляет собой пространственную кривую. Однако в некоторых частных случаях эта линия может распадаться на плоские кривые.
Теорема Монжа: две поверхности второго порядка, описанные около третьей поверхности второго порядка (или в нее вписанные), пересекаются между собой по двум кривым второго
|
порядка (рис. 190). |
Использование этой теоремы |
|||
|
упрощает построение проекции линии пересечения |
||||
|
таких поверхностей на плоскость, параллельную их |
||||
|
осям – на эту плоскость они проецируются |
||||
|
прямыми |
линиями. |
Например, |
два |
цилиндра |
|
(рис.190), |
оси которых пересекаются в |
точке О, |
|
описанные вокруг одной сферы, пересекаются по |
|
|
двум эллипсам, фронтальными проекциями |
|
|
которых являются отрезки прямых. |
Рисунок 187 |

Рисунок 188
3 ПЕРЕСЕЧЕНИЕ КРИВОЙ ПОВЕРХНОСТИ С ПОВЕРХНОСТЬЮ МНОГОГРАННИКА
Каждая грань многогранника в общем случае пере секает кривую поверхность по плоской кривой. Эти кривые пересекаются между собой в точках встречи ребер многогранника с поверхностью. Таким образом, задача на построение линии пересечения кривой поверхности с многогранником сводится к нахождению линии пересечения поверхности плоскостью и точек встречи прямой с поверхностью.
Пример. Построение линии пересечения поверхностей полусферы
|
и призмы (рис.188). |
|
|
Линию пересечения поверхностей полусферы |
и призмы |
выполняем методом вспомогательных секущих плоскостей.
Каждая грань призмы пересекает поверхность полусферы по полуокружностям, которые пересекаются между собой в точках встречи ребер призмы с поверхностью полусферы.
В приведенном примере одна из граней призмы расположена параллельно фронтальной плоскости проекций, поэтому окружность, по которой эта грань пересекает поверхность полусферы, спроецируется на фронтальную плоскость проекций без искажения. Фронтальные проекции остальных двух дуг полуокружностей, очевидно, будут представлять собой дуги полуэллипсов. Построение их на эпюре следует начинать с нахождения опорных точек. Для этого через каждое ребро призмы проведены фронтальные плоскости (P и Q), которые пересекают поверхность полусферы но окружностям.
Точки пересечения фронтальных проекций ребер с соответствующими
полуокружностями являются фронтальными проекциями точек встречи ребер призмы с полусферой (точек 1 , 2 , 3 ) .
Точки 4 и 5, разделяющие кривые на видимую и невидимую части, получены при помощи фронтальной плоскости S, проведенной через центр полусферы.
Промежуточные точки найдены аналогичным построением (при помощи фронтальных плоскостей R и Т).
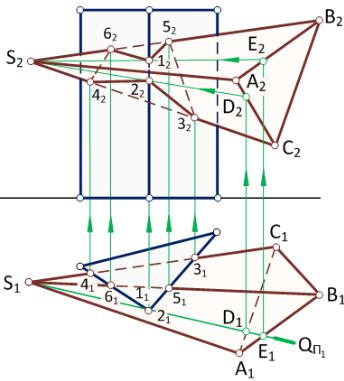
4 ВЗАИМНОЕ ПЕРЕСЕЧЕНИЕ МНОГОГРАННИКОВ
Линия пересечения поверхностей двух многогранников представляет собой замкнутую пространственную ломаную линию (или две замкнутые ломаные линий), которая проходит через точки пересечения ребер одного из многогранников с гранями другого и ребер другого с гранями первого.
Построение линии пересечения многогранников можно производить двумя способами, комбинируя или выбирая из них тот, который в зависимости от условий дает более простые построения:
1способ. Определяют точки, в которых ребра одного из многогранников пересекают грани другого и ребра второго пересекают грани первого. Через полученные точки в определенной последовательности проводят ломаную линию, представляющую собой линию пересечения заданных поверхностей. При этом можно со единять прямыми проекции только тех точек, которые лежат на одной и той же грани.
2 способ. Определяют отрезки прямых, по которым грани одного из многогранников пересекают грани другого; эти отрезки являются звеньями получаемой при пересечении многогранников ломаной линии.
|
Пример. Построение линии пересечения поверхно стей призмы и |
||||
|
пирамиды (рис.189) |
||||
|
Как видно из рис.189, |
||||
|
с |
поверхностью |
пирамиды |
||
|
пересекается только |
одно |
|||
|
переднее ребро призмы. Так |
||||
|
как |
это |
ребро |
||
|
перпендикулярно плоскости |
||||
|
π1, |
то |
горизонтальные |
||
|
проекции |
точек |
входа |
и |
|
|
выхода (точки 1 и 2) |
||||
|
отмечаются |
непосредствен- |
|||
|
но на эпюре. |
||||
|
Для |
нахождения |
их |
||
|
фронтальных |
проекций |
|||
|
через вершину пирамиды и |
||||
|
переднее |
ребро |
призмы |
||
|
проведена |
вспомогательная |
|||
|
горизонтально |
– |
прое- |
||
|
цирующая |
плоскость |
Q. |
||
|
Она пересекла поверхность |
Рисунок 189 |
|||
|
пирамиды по прямым |
SD и |
SE,в пересечении фронтальных проекций которых с фронтальной проекцией переднего ребра призмы отмечены фронтальные проекции 12, 22 точек входа и выхода 1 и 2.Так как грани призмы — горизонтально
– проектирующие плоскости, то построение точек встречи ребер пи – рамиды с гранями призмы (точек 3, 4, 5, 6) никаких затруднений не представляет и понятно из чертежа. Соединив последовательно между собой фронтальные проекции найденных точек, получим фронтальную проекцию линии пересечения. Горизонтальная проекция ее совпадает с горизонтальной проекцией призмы.
При определении видимости точек, принадлежащих линии пересечения, руководствуются следующим правилом: проекция точки, полученная при пересечении двух видимых линий, видима. Точка пересечения двух невидимых или одной видимой и другой невидимой линии невидима.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
В общем случае для графического решения задачи по определению положения точек пересечения (встречи) линий с поверхностью необходимо выполнить ряд геометрических построений в приведенной ниже последовательности: заключить данную линию во вспомогательную поверхность; определить линию пересечения этой вспомогательной поверхности с заданной поверхностью; отметить точки, в которых пересекаются полученная линия с заданной (рис. 238).
* Эта теорема известна также как “теорема Монжа”, по имени основоположника начертательной геометрии Гаспара Монжа, доказавшего эту теорему.
Запишем указанную последовательность решения в виде табл. 9 (как это сделано в § 43 при составлении алгоритма для решения задачи по определению линии пересечения двух поверхностей). В правой части таблицы приведена символическая запись, соответствующая смысловому содержанию отмеченных этапов решения.
Таблица 9
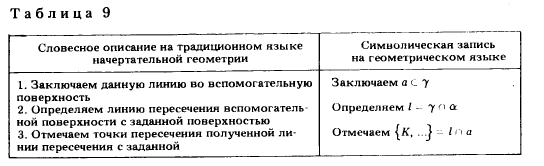
Алгоритм для решения задачи определения точек пересечения линии с поверхностью в символической форме можно записать:
{K,…} = (γ ∩ α) ∩ a.
Здесь, как и у алгоритма определения линии пересечения двух поверхностей, в зависимости от порядка и взаимного расположения заданных кривой и поверхности множество искомых точек {К, …} может состоять из одной, двух и более точек.
Полученный алгоритм является универсальным, пригодным для решения задачи с любым вариантом задания исходных данных. Рассмотрим различные варианты решения задачи:
1. Пересечение кривой с поверхностью.
2. Пересечение кривой с плоскостью.
3. Пересечение прямой с поверхностью.
4. Пересечение прямой с плоскостью.
При решении всех этих задач, как правило, целесообразно для уменьшения графических построений и их упрощения пользоваться в качестве вспомогательной секущей поверхности γ – проецирующей цилиндричес-
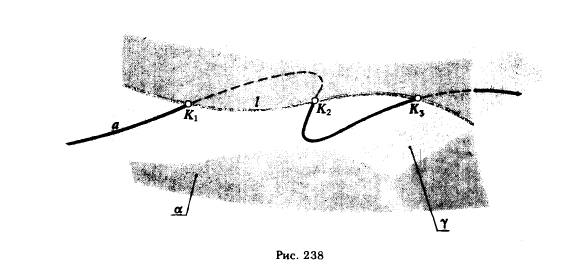
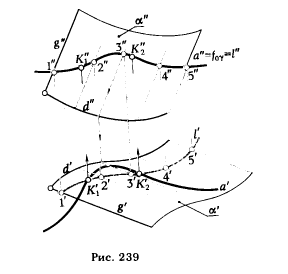
кой поверхностью, в частности, если определяется точка пересечения прямой с поверхностью, – плоскостью. Упрощение решения достигается благодаря тому, что одна из проекций линии пересечения l автоматически определяется положением и формой следа проецирующей поверхности γ. Поэтому задача по определению точек встречи линии с поверхностью сводится к построению второй проекции линии, принадлежащей поверхности, если известна одна ее проекция, т. е. к задаче, которую мы неоднократно решали.
1. Пересечение кривой с поверхностью.
При определении содержания и последовательности выполнения геометрических операций, входящих в состав алгоритма для решения задачи по определению точек пересечения кривой с поверхностью, мы пользовались наглядным чертежом, изображенным на рис. 238. Теперь проследим, как решается эта задача на эпюре Монжа.
ПРИМЕР. Определить точки пересечения кривой а с произвольной цилиндрической поверхностью α (рис. 239) .
РЕШЕНИЕ.
1. Заключаем кривую а во фронтально проецирующую цилиндрическую поверхность γ.
2. Определяем линию пересечения поверхностей γ и α. Для этого отмечаем на а” ≡ f0γ ≡ l” произвольные точки 1″, 2″, 3″, 4″, 5″; зная фронтальные проекции точек, находим их горизонтальные проекции 1′, 2′, 3′, 4′, 5′. Соединив эти точки плавной кривой, получим горизонтальную проекцию l’ кривой l, по которой вспомогательная цилиндрическая поверхность γ пересекает данную поверхность α.
3. Отмечаем точки К’1 и К’2 пересечения кривых l’ и а’. По горизонтальным проекциям определяем их фронтальные проекции К”1 и К”2.
2. Пересечение кривой с плоскостью.
Решение этой задачи аналогично только что рассмотренной, если и есть какое-либо отличие, то оно состоит лишь в том, что приходится определять вторую проекцию линии, принадлежащую не цилиндрической поверхности, как это было в приведенном выше примере, а плоскости.
ПРИМЕР. Определить точку встречи линии а с плоскостью α (рис. 240).
РЕШЕНИЕ.
1. Заключаем линию а в проецирующую цилиндрическую поверхность γ, безразлично какую γ ⊥ π1 или γ ⊥ π2 (на рис. 240γ ⊥ π )
2. Обозначим линию пересечения γ ∩ α = l, тогда l” ⊂ f0γ.
3. Определяем горизонтальную проекцию Для этого отмечаем на l” ряд точек 1″, 2″, 3″, …, с помощью горизонталей (h1, h2, h3, …) плоскости α находим точки 1′, 2 , 3′,…. принадлежащие l’
4. Отмечаем точку К’ = l’ ∩ α’, по К’ находим К”.
3. Пересечение прямой с поверхностью.
В алгоритме решения задачи для определения точек встречи прямой с поверхностью в качестве вспомогательной секущей поверхности следует брать плоскость.
Сложность решения рассматриваемой группы задач зависит от трудоемкости нахождения линии пересечения γ ∩ α, которая определяется видом поверхности α и расположением прямой а как относительно поверхности α, так и по отношению к плоскостям проекций.
Чтобы получить рациональное решение, следует пользоваться наиболее простым способом определения линии l(l = γ ∩ α). Этого можно достигнуть двумя путями: 1) соответствующим выбором положения вспомогательной секущей плоскости γ или 2) переводом секущей прямой а в частное положение. Рассмотрим каждый из этих вариантов решения.
Вариант 1.
а) Вспомогательная секущая плоскость – проецирующая.
ПРИМЕР. Определить точку пересечения прямой а с поверхностью торса (рис. 241).
РЕШЕНИЕ. Заключаем прямую а во фронтально проецирующую плоскость γ. Фронтальная проекция линии пересечения l” совпадает с f0γ ≡ а”. Отмечаем точку 1″, в которой проекция l” пересекает проекцию d” ребра возврата d. Зная положение 1″, определяем горизонтальную проекцию 1′. Проводим ряд прямолинейных образующих торсовой поверхности (касательных к кривой d) и фиксируем точки 2″, 3″, в которых l” пересекает фронтальные проекции этих образующих.
На горизонтальных проекциях соответствующих образующих определяем горизонтальные проекции 2′, 3′. Соединив эти точки плавной кривой, получим горизонтальную проекцию l’.l’ ∩ а’ = К’- горизонтальная проекция искомой точки встречи. По К’ определяем К”.
б) Вспомогательная секущая плоскость – общего положения.
Использование вспомогательной проецирующей плоскости не всегда упрощает решение, возможны случаи, когда целесообразно применять плоскость общего положения.
В качестве иллюстрации, подтверждающей эту мысль, может служить задача по определению точек пересечения прямой общего положения с конической поверхностью.
Плоскость пересекает коническую поверхность по кривой. Исключение составляет только плоскость, проходящая через вершину кони-
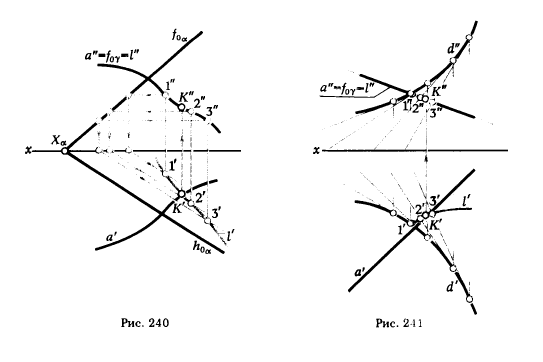
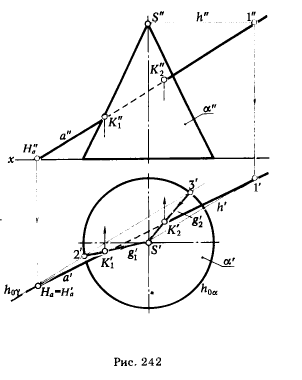
ческой поверхности. В этом случае кривая второго порядка распадается на две прямые – образующие конической поверхности (см. § 45) *
ПРИМЕР. Определить точки пересечения прямой а с поверхностью прямого кругового конуса α (рис. 242).
РЕШЕНИЕ. Заключаем прямую а в плоскость γ, проходящую через вершину конической поверхности S. На рис. 242 плоскость γ задана пересекающимися прямыми а и h , при этом h – горизонталь.
Определяем горизонтальный след плоскости γ; для этого находим горизонтальный след прямой Нa и через него проводим h0γ параллельно горизонтальной проекции горизонтали h’. Отмечаем точки 2′ и 3′, в которых h0γ ∩ h0α. (S’2′) и (S’3′) – образующие поверхности α, по которым она пересекается плоскостью γ.
Точки К’1 и К’2 (К’1 = а’ ∩ (S’2′) и К’2 = а’ ∩ (S’3′)) – горизонтальные проекции искомых точек пересечения. Зная положение К’1 и К’2, определяем К”1 и К”2.
Вариант 2. Перевод секущей прямой в частное положение.
При пересечении поверхности сферы плоскостью в сечении получается окружность, которая проецируется на плоскости проекции в общем случае в виде эллипсов или прямой и эллипса (если секущая плоскость проецирующая). В частном случае, когда секущая плоскость параллельна плоскости проекции, окружность проецируется на эту плоскость проекции без искажения. Поэтому, чтобы упростить решение задачи, следует произвольно расположенную прямую перевести в положение, параллельное какой-либо плоскости проекции. Тогда представляется возможность заключить прямую в плоскость, параллельную плоскости проекции.
ПРИМЕР 1. Определить точки встречи прямой а, заданной отрезком [АВ] с поверхностью сферы α (рис. 243).
РЕШЕНИЕ. Переводим прямую, произвольно расположенную в пространстве, в положение, параллельное плоскости проекции. Для этого переходим от системы xπ2/π1 к системе x1π3/π1 в которой π3 || а .
В этом случае горизонтально проецирующая плоскость γ ⊃ a пересечет поверхность сферы по окружности с радиуса R (см. рис. 243) , которая спроецируется на плоскость π1 в [ 1’2′], а на плоскость π3 в окружность с”1 того же радиуса R. Точки K”1 и К”2 пересечения с”1 с [А”1В”1] – вспомогательные проекции искомых точек, по ним определяем вначале К’1 и К’2, а затем и К”1 и К”2.
Если прямая а , пересекающая поверхность вращения, проходит через ось i этой поверхности, то перевод прямой а в частное положение целесообразно осуществить путем вращения прямой вокруг оси i.
ПРИМЕР 2. Определить точки встречи прямой а с поверхностью вращения α (рис. 244).
* Если секущая плоскость проходит через вершину конической поверхности и составляет с ее осью угол больший, чем угол наклона к этой оси образующей конической поверхности, то сечение распадается на две мнимые прямые.
РЕШЕНИЕ. Горизонтально проецирующая плоскость γ, в которую заключаем прямую а , пересечет поверхность вращения по меридиану g1.
Чтобы не строить искаженной фронтальной проекции меридионального сечения, поворачиваем плоскость γ и находящуюся в ней прямую а вокруг оси i до положения, параллельного π2, тогда g’1 совпадает g’ – горизонтальной проекцией главного меридиана, a h0γ с h0γ1. После поворота прямая а займет положение a1(а’1, а”1). С помощью точек К”11 и К”12 , в которых a”1 ∩ g”1, определяем положение К”1 и К”2, а затем К’1 и К’2.
4. Пересечение прямой с плоскостью.
Определение точки встречи прямой с плоскостью относится к элементарной задаче, но ее значение для решения самых различных, более сложных задач, трудно переоценить. Задача по нахождению точки встречи прямой с плоскостью входит как составная часть (фрагмент) в алгоритм решения широкого круга как позиционных, так и метрических задач.
Решение этой задачи даже в самом общем случае, когда и плоскость и прямая занимают произвольное положение в пространстве, легко сводится к простейшей задаче по определению линии пересечения двух плоскостей, из которых одна – проецирующая (см. § 44, рис. 187, 188), с последующим определением второй проекции точки, принадлежащей плоскости, если известна одна из ее проекций (см. § 40, примеры 1 … 3, рис. 169… …171). Для этого достаточно прямую заключить во вспомогательную проецирующую плоскость.
ПРИМЕР 1. Определить точку встречи прямой а с плоскостью α (рис. 245).
РЕШЕНИЕ. Так как а – прямая, то в алгоритме К = (γ ∩ α) ∩ a в качестве
секущей поверхности следует выбирать плоскость. Эта плоскость пересечет заданную α по прямой l . Поэтому в рассматриваемом случае предписываемая алго-
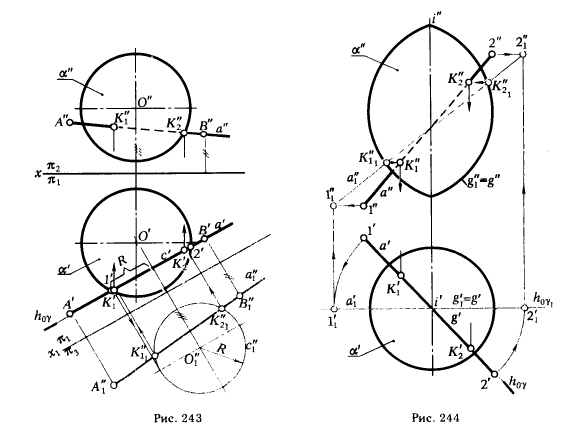
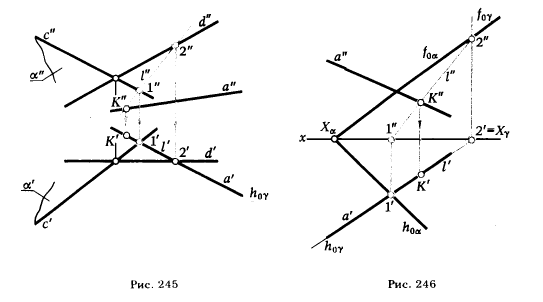
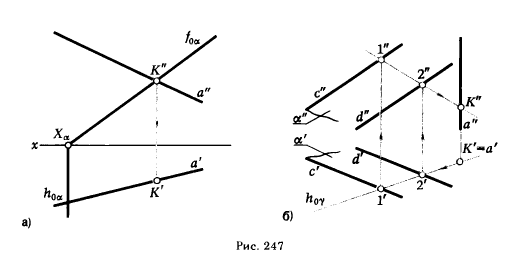
ритмом последовательность выполнения геометрических построений будет иметь следующее содержание:
1) проводим через а’ (или а”) горизонтальный (фронтальный) след горизонтально проецирующей (фронтально проецирующей) плоскости γ;
2) определяем фронтальную (горизонтальную) проекцию линии пересечения плоскости γ с данной плоскостью α l” = γ” ∩ α” (или l’ = γ’ ∩ α’);
3) определяем К” = а” ∩ l” (или К’ = а’ ∩ l’); зная К”, находим К’ (или зная К’, находим К”).
Алгоритм решения не меняется, если мы будем иметь дело с другим вариантом задания плоскости – параллельными прямыми или прямыми, по которым плоскость пересекает плоскости проекций (следами плоскости).
ПРИМЕР 2. Определить точку пересечения прямой а с плоскостью α (рис. 246).
РЕШЕНИЕ. Так же, как и в предыдущем примере, заключаем прямую а в проецирующую плоскость γ ⊃ a (h 0γ ≡ а’). Строим линию пересечения плоскостей γ ∩ α = l . Отмечаем К” = l” ∩ α”. По К” находим К’.
Решение задачи упрощается, если одна из заданных фигур (прямая или плоскость) занимает проецирующее положение. Рис. 247,а и б иллюстрирует решение таких задач:
а) плоскость α – проецирующая, а прямая a -общего положения (рис. 247 а);
б) плоскость α – общего положения, а прямая а – проецирующая (рис. 247,6).
Решения задач настолько просты, что они ясны из чертежей и не требуют каких-либо пояснений.
ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
- Изложите общий принцип построения обобщенного алгоритма для решения задачи по определению линии пересечения поверхностей.
- Сформулируйте возможные варианты решения задачи по определению линии пересечения многогранника плоскостью.
- В каких случаях для определения линии пересечения двух поверхностей можно применять способ:
- Какие точки линии пересечения поверхностей называются опорными?
- Напишите и дайте пояснение алгоритма решения задачи по определению точки встречи прямой с плоскостью.
- В чем заключается решение задач по определению сечения поверхности плоскостью с помощью способа граней и способа ребер?
- В каких случаях плоскость пересекает поверхность прямого кругового конуса: по двум пересекающимся прямым, по окружности, эллипсу, параболе, гиперболе?
- Что представляют собой фронтальные проекции линии пересечения двух поверхностей вращения второго порядка, имеющих общую плоскость симметрии, параллельную плоскости π2 ?
- Какая зависимость существует между порядком пересекающихся поверхностей и порядком линии, полученной в результате их пересечения?
- Сформулируйте условия (теоремы) , при которых кривая – линия пересечения поверхностей – распадается на две кривые второго порядка?
- Приведите примеры, когда кривая – линия пересечения двух цилиндрических поверхностей – распадается на одну, две, три, четыре прямых.
- В чем состоит содержание алгоритма решения задачи для определения точек пересечения линии с поверхностью?
- Чем следует руководствоваться при выборе вспомогательной секущей поверхности при определении точек пересечения линии с поверхностью?
- В каком случае можно для упрощения решения задачи по определению точек встречи прямой с поверхностью применять способ вращения вокруг оси, перпендикулярной плоскости проекции?
а) вращающихся плоскостей;
б) пучка плоскостей с несобственной прямой;
в) концентрических сфер;
г) эксцентрических сфер?
Содержание:
- Пересечение прямой линии с поверхностями тел
- Линии пересечения и перехода
- Общие правила построения линий пересечения поверхностей
- Пересечение поверхностей цилиндра и призмы
- Пересечение цилиндрических поверхностей
- Пересечение поверхностей многогранников
- Пересечение поверхностей цилиндра и конуса
- Пересечение поверхностей сферы и цилиндра
- Пересечение поверхностей тора и цилиндра
- Построение линий пересечения поверхностей способом вспомогательных сфер
Взаимное пересечение поверхностей. Поверхности могут взаимно пересекаться. При этом линии одной поверхности пересекаются с другой поверхностью и образуют точки, которые в совокупности представляют линию пересечения.
Пересечение прямой линии с поверхностями тел
Конструкции деталей можно рассматривать как сочетание различных геометрических тел. Необходимо уметь строить линии пересечения поверхностей этих тел. Пример, где требуется подобное построение, показан на рис. 195, на котором изображен бункер, ограниченный цилиндрической поверхностью А, пересекающейся с конической поверхностью Б и поверхностью пирамиды В.
В зависимости от вида поверхностей тел линии пересечения могут быть лекальными кривыми или ломаными.
Для решения задач на построение линий пересечения поверхностей необходимо предварительно усвоить построение точек пересечения прямой с поверхностями различных геометрических тел.

Рис. 195
Если прямая пересекается с поверхностью тела, получаются две точки, одновременно принадлежащие как поверхности тела, так и прямой линии. Такие точки называются точками входа и выхода (рис. 196. а; точки N и М). Для нахождения этих точек выполняются построения в следующем порядке.
Через данную прямую проводят вспомогательную плоскость (обычно проецирующую). Например, на рис. 196, а, где изображено пересечение прямой АВ с поверхностью пирамиды, через прямую проведена вспомогательная горизонтально-проецирующая плоскость Р. Затем находят линии пересечения вспомогательной плоскости с поверхностью данного геометрического тела (линии КС и ЕD). На пересечении полученных линий с заданной прямом находят искомые точки (точки N и М).
На комплексном чертеже точки входа и выхода определяют следующим образом (рис. 196. б). Горизонтальные проекции kс и ed прямых КС и ED совпадают с горизонтальным следом плоскости РH. Фронтальные проекции точек k‘, с’, е’ и d‘ определяют, пользуясь вертикальными линиями связи, проведенными из точек k, с, е и d до пересечения с фронтальными проекциями основания пирамиды. Соединяют точки k‘ с с’ и е’ с d‘ прямыми. На пересечении фронтальных проекций найденных прямых с проекцией а’Ь’ данной прямой получают фронтальные проекции n‘ и т’ искомых точек входа и выхода. Проведя через них вертикальные линии связи, находят горизонтальные проекции п и т этих точек.

Рис. 196
В некоторых частных случаях можно обойтись без применения вспомогательной плоскости. Например, точки входа и выхода прямой АВ с поверхностью прямого кругового цилиндра (рис. 197, а) определяют следующим образом.
Горизонтальная проекция цилиндрической поверхности представляет собой окружность, поэтому горизонтальные проекции всех точек, расположенных на цилиндрической поверхности, в том числе и двух искомых точек, будут расположены на этой окружности (рис. 197, а).
Фронтальные проекции n‘ и m‘ искомых точек определяют, проводя через точки n и m вертикальные линии связи до встречи с данной фронтальной проекцией а’Ь’ прямой АВ.
На рис. 197, б, в показано построение точек входа и выхода прямой АВ и поверхности прямого кругового конуса. Через прямую АВ проводят вспомогательную плоскость Р, проходящую через вершину конуса. Плоскость Р пересечет конус по образующим SH3 SH4.
На комплексном чертеже изображение плоскости Р строят следующим образом. На прямой АВ берут произвольную точку К и соединяют ее с вершиной S конуса прямой линией. Две пересекающиеся прямые АВ и SK определяют плоскость Р.
Чтобы найти точки входа и выхода, необходимо построить горизонтальные проекции образующих SH3 и SH4. Для этого продолжим s’k’ и а’b‘ до пересечения с осью х в точках h‘2 и h‘1. Опустим линию связи из точки k‘ до пересечения с ab, полученную точку k соединим с s. Продлим горизонтальную проекцию прямой SK до пересечения с линией связи, опушенной из точки h‘2, получим точку h2. Из точки h‘1 проведем линию связи до пересечения с продолжением прямой ab, получим точку h1. Через следы h1 и h2 пройдет горизонтальный след плоскости Р. Точки h1 и h2 соединим прямой и получим горизонтальный след РН плоскости Р.
Основание конуса является горизонтальным следом конической поверхности. Поэтому, определив точки пересечения этого следа со следом РН плоскости Р, можно найти и те две образующие, по которым коническая поверхность пересекается вспомогательной плоскостью Р. На комплексном чертеже горизонтальная проекция основания конуса (окружность) пересекается со следом РН в точках h3 и h4. Эти точки соединяют с вершиной s и получают следы sh3 и sh4 образующих SH3 и SH4.
На пересечении найденных образующих с данной прямой АВ находят искомые точки М и N — точки входа и выхода прямой АВ с конической поверхностью.
Горизонтальные проекции точек т и n находят на пересечении горизонтальных проекций образующих sh3 и sh4 с горизонтальной проекцией прямой ab. Через точки m и n проводят вертикальные линии связи до пересечения а’b‘ и находят фронтальные проекции т‘ и n‘ точек входа и выхода.

Рис. 197
Точки входа и выхода прямой АВ с поверхностью сферы (рис. 198) находят, проведя через прямую АВ вспомогательную фронтально-проецирующую плоскость Р.
Вспомогательная плоскость Р пересекает сферу по окружности, которая проецируется на плоскость Н в виде эллипса, что затрудняет построение. Поэтому в данном случае необходимо применить способ перемены плоскостей проекций. Новую плоскость проекций выбирают так, чтобы вспомогательная плоскость Р была бы ей параллельна, т.с. следует провести новую ось проекций x1 так. чтобы она была параллельна фронтальной проекции а’b‘ прямой АВ (для упрощения построении на рис. 198 ось x1 проведена через проекцию а’b‘).
Затем необходимо построить новую горизонтальную проекцию a1b1 прямой АВ и новую горизонтальную проекцию окружности диаметра D, по которой плоскость Р пересекает сферу. На пересечении новых горизонтальных проекций двух искомых точек m} и n} Обратным построением определяем фронтальные т’ и n‘ и горизонтальные т и п проекции точек входа и выхода.

Рис. 198
Линии пересечения и перехода
Многие детали машин представляют собой конструкции из пересекающихся геометрических тел. Общая линия пересекающихся поверхностей называется линией пересечения.
На чертежах линии пересечения поверхностей изображаются сплошной основной линией (рис. 199, а). В местах перехода поверхностей литых и штампованных деталей нет четкой линии пересечения. Воображаемая линия пересечения называется линией перехода и условно изображается на чертежах сплошной тонкой линией. Эта линия начинается и заканчивается в точках пересечения продолжения контура взаимно пересекающихся поверхностей (рис. 199. б).

Рис. 199
Встречаются детали, имеющие всевозможные линии пересечения и перехода поверхностей. Особенно много линий перехода у поверхностей деталей, изготовленных литьем.
На рис. 200, а на приборе для испытания твердости видны линии переходов различных поверхностей.
Кожух и крышка смесительного аппарата (рис. 200. б) имеют разнообразные линии перехода. Здесь можно видеть линии взаимного пересечения цилиндрических и других поверхностей.
Построение линий пересечения и перехода поверхностей при выполнении чертежей трубопроводов, вентиляционных устройств, резервуаров, кожухов машин, станков требует точности.

Рис. 200
Общие правила построения линий пересечения поверхностей
Метод построения линий пересечения поверхностей тел заключается в проведении вспомогательных секущих плоскостей и нахождении отдельных точек линий пересечения данных поверхностей в этих плоскостях.
Построение линии пересечения поверхностей тел начинают с нахождения очевидных точек. Например, на рис. 201, где изображены линии пересечения призмы с конусом, такими точками являются точки А и В. Затем определяют характерные точки, расположенные, например, на очерковых образующих поверхностей вращения или крайних ребрах, отделяющих видимую часть линий перехода от невидимой. На рис. 201 это точки С и D. Они располагаются на крайних ребрах верхней горизонтальной грани призмы.
Все остальные точки линии пересечения называются промежуточными (например, точки Е и F). Обычно их определяют с помощью вспомогательных параллельных секущих плоскостей (рис. 201, а).
В качестве вспомогательных плоскостей выбирают такие плоскости, которые пересекают обе заданные поверхности по простым линиям — прямым или окружностям, причем окружности должны располагаться в плоскостях, параллельных плоскостям проекций.
В данном примере плоскость Р рассекает конус по окружности (рис. 201, в), с помощью которой находят горизонтальные проекции точек е и f.
Во всех случаях. перед тем как строить линию пересечения поверхностей на чертеже, необходимо представить себе эту линию в пространстве (рис. 201, б).

Рис. 201
Пересечение поверхностей цилиндра и призмы
На рис. 202 показано построение проекции линий пересечения поверхности треугольной призмы с поверхностью прямого кругового цилиндра. Боковые грани призмы перпендикулярны плоскости V (рис. 202, а), поэтому фронтальная проекция линий пересечения поверхностей этих тел совпадает с фронтальной проекцией основания призмы. Горизонтальные проекции линий пересечения поверхностей совпадают с горизонтальной проекцией цилиндра и являются окружностью. Профильные проекции точек А и Е находим по горизонтальным и фронтальным проекциям с помощью линий связи. Для построения проекций промежуточных точек В, С, D используем вспомогательные секущие плоскости РV, РV1 и РV2, c помощью которых находим фронтальные проекции b‘, с’. d‘ точек B, С. D.
В данном примере можно обойтись без вспомогательных секущих плоскостей, намечая произвольно на фронтальной проекции точки b‘, с’, d‘.
Опуская линии связи на горизонтальную проекцию, находим горизонтальные проекции с, Ь, d точек С, В, D. На профильной проекции с помощью линий связи находим проекции Ь”, с”, d“.
На рис. 202, б показано построение изометрической проекции. После построения изометрической проекции цилиндра, используя размеры т и п (рис. 202, а), строят изометрическую проекцию основания призмы, на котором находят точки 1, 2. 3. 4. 5. От этих точек откладывают расстояния 1“е”. 2“d“ и т.п., взятые с профильной проекции комплексного чертежа, и находят точки А, В. С, D. Е
На изометрической проекции линия пересечения поверхностей цилиндра и призмы получается соединением точек А, В. С, D, Е, которые строятся но координатам, взятым с комплексного чертежа.

Рис. 202
Пересечение цилиндрических поверхностей
При выполнении машиностроительных чертежей наиболее часто встречается случай пересечения двух цилиндрических поверхностей, оси которых расположены под углом 900.
Разберем пример построения линии пересечения поверхностей двух прямых круговых цилиндров. оси которых перпендикулярны к плоскостям проекций (рис. 203, а).
В начале построения, как известно, находим проекции очевидных точек 1, 7 и 4.
Построение проекций промежуточных точек показано на рис. 203, б. Если в данном примере применить общий способ построения линий пересечения с помощью вспомогательных взаимно параллельных плоскостей, пересекающих обе цилиндрические поверхности по образующим, то на пересечении этих образующих будут найдены искомые промежуточные точки линии пересечения (например, точки 2, 3, 5 на рис. 203, а). Однако в данном случае выполнять такое построение нет необходимости по следующим соображениям.
Горизонтальная проекция искомой линии пересечения поверхностей совпадает с окружностью — горизонтальной проекцией большого цилиндра. Профильная проекция линии пересечения также совпадает с окружностью — профильной проекцией малого цилиндра. Таким образом, фронтальную проекцию искомой линии пересечения легко найти по общему правилу построения кривой линии по точкам, когда две проекции точек известны. Например, по горизонтальной проекции точки 3 (рис. 203, б) находят профильную проекцию 3″. Но двум проекциям 3 и 3″ определяют фронтальную проекцию 3′ точки 3. принадлежащей линии пересечения цилиндров.
Построение изометрической проекции пересекающихся цилиндров начинают с построения изометрической проекции вертикального цилиндра. Далее через точку а1 параллельно оси х проводят ось горизонтального цилиндра. Положение точки О1 определяется величиной h1, взятой с комплексного чертежа (рис. 203, б). Отрезок, равный h, откладываем от точки О вверх по оси z (рис. 203, в). Откладывая от точки О1 по оси горизонтального цилиндра отрезок l, получим точку О2 — центр основания горизонтального цилиндра.
Изометрическая проекция линии пересечения поверхностей строится по точкам с помощью трех координат. Однако в данном примере искомые точки можно построить иначе.
Так, например, точки 3 и 2 строят следующим образом. От центра О2 (рис. 203, в) вверх, параллельно оси z, откладывают отрезки т и п, взятые с комплексного чертежа. Через концы этих отрезков прямые, параллельные оси у, до пересечения с основанием горизонтального цилиндра в точках 31 и 21. Затем из точек 1…3 проводят прямые, параллельные оси х, и на них откладывают отрезки, равные расстоянию от основания горизонтального цилиндра до линии пересечения, взятые с фронтальной или горизонтальной проекции комплексного чертежа. Конечные точки этих отрезков будут принадлежать линии пересечения. Через полученные точки проводят по лекалу кривую, выделяя се видимые и невидимые части.

Рис. 203
Пример взаимного пересечения цилиндрических поверхностей с осями, перпендикулярными друг к другу, приведен на рис. 204, а. Одна цилиндрическая поверхность корпуса имеет вертикальную ось, а другая (половина цилиндра) — горизонтальную.
Если диаметры пересекающихся цилиндрических поверхностей одинаковы. то профильная проекция линии пересечения представляет собой две пересекающиеся прямые (рис. 204, б).
Если пересекающиеся цилиндрические поверхности имеют оси, расположенные под углом, отличным от прямого угла, то линию их пересечения строят с помощью вспомогательных секущих плоскостей или другими способами (например, способом сфер).

Рис. 204
Пересечение поверхностей многогранников
При пересечении двух многогранников линия пересечения поверхностей представляет собой ломаную линию.
Если ребра двух призм взаимно перпендикулярны (рис. 205, а), то линия пересечения призм строится следующим образом.
Горизонтальная и профильная проекции линии пересечения совпадают соответственно с горизонтальной проекцией пятиугольника (основания одной призмы) и с профильной проекцией четырехугольника (основания другой призмы). Фронтальную проекцию ломаной линии пересечения строят по точкам пересечения ребер одной призмы с гранями другой.
Например, взяв горизонтальную 1 и профильную 1″ проекции точки 1 пересечения ребра пятиугольной призмы с гранью четырехугольной (рис. 205, а) и пользуясь известным приемом построения, с помощью линии связи можно легко найти фронтальную проекцию 1′ точки 1, принадлежащей линии пересечения призм.
Изометрическая проекция двух пересекающихся призм (рис. 205, б) может быть построена по координатам соответствующих точек.
Например, изометрическую проекцию двух точек 5 и 51, симметрично расположенных на левой грани пятиугольной призмы, строят так. Принимая для удобства построений за начало координат точку О, лежащую на верхнем основании пятиугольной призмы, откладываем влево от О по оси х отрезок ОЕ, величину которого берут с комплексного чертежа на фронтальной или горизонтальной проекции. Далее из точки Е вниз параллельно оси z откладываем отрезок EF, равный а, и, наконец, от точки F влево и вправо параллельно оси у откладываем отрезки F5 и F51, равные с/2.
Далее от точки F параллельно оси х откладываем отрезок n, взятый с комплексного чертежа. Через его конец проводим прямую, параллельную оси у, и откладываем на ней отрезок, равный с. Вниз параллельно оси z откладываем отрезок, равный Ь, и параллельно у — отрезок, равный k. В результате получаем изометрию основания четырехугольной призмы.

Рис. 205
Точки 1 и 4 на ребрах пятиугольной призмы можно построить, используя только одну координату z.
Примеры, где требуются подобные построения, показаны на рис. 206, на которых видны линии пересечения поверхностей призм.

Рис. 206
Линию пересечения поверхностей четырехугольной призмы с четырехугольной пирамидой (рис. 207, а) строят по точкам пересечения ребер одного многогранника с гранями другого многогранника.
Например, проекции точек 1 и 3 искомой линии пересечения находят следующим образом. Фронтальные проекции 1‘ и 3′ очевидны. Профильные проекции 1“ и 3“ и горизонтальные 1 и 3 находят с помощью линий связи. Аналогично находят точки 2 и 4.
Линию пересечения поверхностей четырехугольной призмы с четырехугольной пирамидой (рис. 207, а) строят по точкам пересечения ребер одного многогранника с гранями другого многогранника.
Например, проекции точек 1 и 3 искомой линии пересечения находят следующим образом. Фронтальные проекции 1‘ и 3′ очевидны. Профильные проекции 1“ и 3“ и горизонтальные 1 и 3 находят с помощью линий связи. Аналогично находят точки 2 и 4.
На рис. 207, б и в показана последовательность построения диметрической проекции. Сначала строят пирамиду. Для построения призмы от точки О откладывают отрезок ОО1, взятый с фронтальной проекции комплексного чертежа (О’ О’1 ). и получают точку О1 (рис. 207, б). Через точку О1 проводят параллельно оси х ось симметрии призмы и по ней от точки откладывают вправо и влево половины высоты призмы. Через точки О2 и О3 проводят прямые, параллельные осям у и z, на которых откладывают соответственно половину и целую длину диагоналей четырехугольника основания призмы. Соединив концы диагоналей прямыми, получают диметрическую проекцию основания призмы.
Диметрические проекции точек пересечения 2. 4, б. 8 ребер призмы и пирамиды получаются без дополнительных построений (рис. 207, в).
Диметрические проекции точек пересечения 1, 3, 5. 7 ребер пирамиды с гранями призмы находят по координатам известным способом.
В этом примере диметрические проекции точек 1, 3, 5 и 7 можно построить иначе. От середины левого основания призмы — точки О2 — откладываем вверх и вниз по оси z соответственно отрезки т и n, взятые с комплексного чертежа. Через концы отрезков т и n проводят прямые, параллельные оси у, до пересечения с контуром основания призмы в точках А, В, С и D. Через эти точки проводят прямые, параллельные оси х, до пересечения с ребрами пирамиды. В результате получают искомые точки 1, 3, 5 и 7.

Рис. 207
На рис. 208 показан корпус оптического компаратора, который имеет элементы пересечения поверхностей пирамид и призм. На рисунке видна линия пересечения поверхностей этих тел.

Рис. 208
Пересечение поверхностей цилиндра и конуса
Пример пересечения поверхностей цилиндра и конуса показан на рис. 209, б. Построение линии пересечения поверхностей прямого кругового усеченного конуса, имеющего вертикальную ось, с цилиндром, расположенным горизонтально, показано на рис. 209, а. Оси цилиндра и конуса пересекаются в точке О1 и лежат в одной плоскости.
Как и ранее, сначала определяют проекции очевидных 1, 7 и характерных 4, 10 точек линии пересечения.
Для определения промежуточных точек проводят вспомогательные горизонтальные секущие плоскости Р1…Р5. (рис. 209, а). Они будут рассекать конус по окружности, а цилиндр по образующим (рис. 209, б). Искомые точки линии пересечения находятся на пересечении образующих с окружностями.
Для определения горизонтальных проекций точек пересечения из центра O1 проводят горизонтальные проекции дуг окружностей (рис. 209, а), по которым вспомогательные плоскости Р1…Р5 пересекают конус. Размеры радиусов этих дуг окружностей взяты с профильной проекции.
Так как профильные проекции точек 1“… 12“ известны, то, проводя линии связи до пересечения с соответствующими дугами окружностей, находят горизонтальные проекции точек 1… 12. Используя линии связи, по двум имеющимся проекциям, профильной и горизонтальней, находим фронтальные проекции точек пересечения 1‘…12’.
Полученные на фронтальной и горизонтальной проекциях точки, принадлежащие к линии пересечения. обводят по лекалу.
На горизонтальной проекции часть линии пересечения будет видимой, а часть — невидимой. Границу этих частей линии пересечения определяют с помощью вспомогательной секущей плоскости Р3, проведенной через ось цилиндра. Точки, расположенные над плоскостью Р3 (см. профильную проекцию), будут на плоскости Н видимы, а точки, расположенные под плоскостью Р3,— невидимы.
Изометрическую проекцию пересекающихся поверхностей цилиндра и конуса вычерчивают в такой последовательности. Вначале выполняют изометрическую проекцию конуса (рис. 209, в). Затем от центра О нижнего основания конуса по его оси вверх откладывают координату ОО1 = h и получают точку О1, через которую проводят ось цилиндра параллельно изометрической оси х. От точки О1 по этой оси откладывают координату х = О1О2 точки О2 — центра окружности основания цилиндра.
Для построения линии пересечения находят изометрические проекции точек этой линии с помощью их координат, взятых с комплексного чертежа. За начало координат принимается точка О2 (центр основания цилиндра). Параллельно оси у проводят до пересечения с овалом следы плоскостей сечения с координатами по оси z, взятых с профильной проекции. Из полученных точек А, В, С… параллельно оси х проводят прямые — образующие цилиндра, на них откладывают координаты Al, В2, …, взятые с фронтальной проекции комплексного чертежа, и получают точки 2… 12, принадлежащие искомой линии пересечения.
Через найденные точки проводят кривую линию по лекалу.

Рис. 209
На рис. 210 показана деталь. Линию пересечения конической поверхности с цилиндрической строят описанным выше способом.

Рис. 210
Построение линии пересечения поверхностей цилиндра и конуса, оси которых параллельны (рис. 211), аналогично построению, рассмотренному на рис. 209.
Выбирают вспомогательные горизонтальные плоскости, например Р1, Р2 и Р3, которые пересекают конус и цилиндр по окружностям (рис. 211, б). Диаметр окружностей, образованных в результате пересечения этих плоскостей с цилиндрам, одинаков и равен D; диаметры окружностей, полученных в результате пересечения плоскостей с конусом, — различные. Взаимное пересечение горизонтальных проекций этих окружностей дают искомые горизонтальные проекции точек 1…9 линии пересечения (рис. 211, а). Фронтальные проекции 1’…9′ этих точек находят с помощью линий связи на фронтальных следах РV1, РV2, РV3 вспомогательных плоскостей. Профильные проекции точек строят по двум их известным проекциям.
Характерными точками в данном примере являются: высшая точка линии пересечения — точка 5, нахождение проекций которой начинают с имеющейся горизонтальной проекции, и точки 1, 9
Точки 1 и 9 получились от пересечения оснований цилиндра и конуса.
Построение изометрической проекции пересекающихся конуса и цилиндра (рис. 211, в) выполняется по этапам, подробно описанным в предыдущем примере (см. рис. 209, в). Построение начинается проведением изометрических осей конуса и цилиндра, затем их оснований (эллипсов) с центрами на расстоянии друг от друга, определяемом координатой n3. Для построения линий пересечения находят изометрические проекции точек этой линии с помощью координат, взятых с чертежа.

Рис. 211
На рис. 212 показана деталь, имеющая форму двух цилиндров, пересекающихся с конусом. Оси цилиндра и конуса параллельны.

Рис. 212
Примеры пересечения поверхностей даны на рис. 213. Линии пересечения показаны красным цветом.

Рис. 213
Пересечение поверхностей сферы и цилиндра
Прямой круговой цилиндр, расположенный перпендикулярно плоскости Н, пересекается с шаром, центр которого расположен на оси цилиндра, по окружности, которая изображается на фронтальной проекции отрезком прямой (рис 214). Проводя через точки А и В пересечения контурных образующих цилиндра и очерка шара вспомогательную горизонтальную плоскость Р, заметим следующее. Плоскость Р пересечет как цилиндр, так и шар по окружности одинакового диаметра, которая расположена в проецирующей плоскости. Следовательно, се фронтальная проекция будет изображаться в виде прямой а’b’.
При пересечении поверхности конуса или поверхности вращения с шаром, центр которого расположен на оси этих поверхностей, также получается окружность (рис. 214, а).
Если центр шара расположен вне оси цилиндра (рис. 214, б), то для построения линии пересечения применяют вспомогательные горизонтальные плоскости. Например, вспомогательная горизонтальная плоскость Р пересекает цилиндр по окружности радиуса r, а шар — по окружности радиуса R. Точки пересечения а и b горизонтальных проекций этих окружностей принадлежат горизонтальной проекции линии пересечения. Фронтальные проекции а’ и b‘ строят, используя линии связи.
Одной из характерных точек данной линии пересечения является верхняя точка D. Горизонтальная проекция этой точки находится на пересечении прямой, соединяющей центры окружностей радиусов r и R с горизонтальной проекцией основания цилиндрической поверхности. Для построения фронтальной проекции точки D через точку d проводят дугу радиуса r1, строят фронтальную проекцию дуги (отрезок прямой, параллельной оси х) и с помощью линии связи находят точку d’.

Рис. 214
Пересечение поверхностей тора и цилиндра
Патрубок, форма которого образована пересекающимися поверхностями тора и цилиндра, показан на рис. 215. Выполнен комплексный чертеж с построением линии пересечения поверхностей и тора, и цилиндра. В этом примере очевидные точки 1 и 5. Для определения проекций промежуточных точек используют вспомогательные плоскости РН и PН1, параллельные фронтальной плоскости проекции. Например, плоскость РН пересекает поверхность тора по окружности радиуса R, а поверхность цилиндра — по двум образующим Взаимное пересечение этих образующих с дугою окружности радиуса R дает на фронтальной проекции две точки 2′ и 4′, принадлежащие искомой линии пересечения.

Рис. 215
Построение линий пересечения поверхностей способом вспомогательных сфер
Для построения линии пересечения поверхностей вместо вспомогательных секущих плоскостей при определенных условиях удобно применять вспомогательные сферические поверхности.
В отличие от метода вспомогательных секущих плоскостей метод вспомогательных сфер имеет преимущество, так как при построении фронтальной проекции линии пересечения поверхностей не используются две другие проекции пересекающихся поверхностей (рис. 216).
Вспомогательные сферические поверхности для построения линий пересечения поверхностей тел можно применять лишь при следующих условиях:
а) пересекающиеся поверхности должны быть поверхностями вращения;
б) оси поверхностей вращения должны пересекаться; точка пересечения осей является центром вспомогательных сфер;
в) оси поверхностей вращения должны быть параллельны какой-либо плоскости проекций.
Примеры применения вспомогательных сферических поверхностей показаны на рис. 216, а и б.
На рис. 216, а дано построение фронтальных проекций линии пересечения поверхностей двух цилиндров, оси которых пересекаются под острым углом.
Вспомогательные сферические поверхности проводят из точки О’ пересечения осей цилиндров.
Построим, например, фронтальную проекцию некоторой промежуточной точки линии пересечения. Для этого из точки О’ проводят сферическую поверхность радиуса R, которая на данной проекции изобразится в виде окружности этого же радиуса. Окружность радиуса R пересечет горизонтальный цилиндр по окружностям диаметра АС и ВD, а наклонно расположенный цилиндр — по окружностям диаметра АВ.
В пересечении полученных проекций окружностей — отрезков а’b’ и c‘d‘— находят проекцию 2′ промежуточной точки линии пересечения.
Вводя еще целый ряд вспомогательных сферических поверхностей, можно построить необходимое число точек линии пересечения.
Пределы радиусов сферических поверхностей находят следующим образом (рис. 216, а и б): наибольшая окружность сферической поверхности должна пересекаться с контурными образующими 1—1 и II— II цилиндра и наименьшая должна быть касательной к одной из данных пересекающихся поверхностей и пересекаться с образующими другой поверхности.

Рис. 216
Если поверхности двух конусов (рис. 217, а) описаны около шара, то они касаются шара по двум окружностям; эти окружности пересекаются в двух точках, которые проецируются на фронтальную плоскость проекций в точку р’. Плоскости, в которых лежат эти окружности, пересекаются по прямой, соединяющей точки пересечения линий касания конусов с шаром. Окружности проецируются на фронтальную плоскость проекций в виде прямых линий.
Соединив очевидную точку s’ пересечения конусов с точкой р‘, получим линию пересечения конусов с шаром, которая представляет собой фронтальную проекцию эллипса.
Разберем второй подобный пример. Если два прямых круговых цилиндра с осями, пересекающимися в точке О’ (рис. 217, б), описаны около шара с центром в точке О, то фронтальная проекция шара будет окружностью, касательной к контурным образующим цилиндров. Линии пересечения поверхностей этих цилиндров представляют собой эллипсы, фронтальные проекции которых изображаются в виде прямых линий а’b‘ и c’d’.

Рис. 217
Примеры и образцы решения задач:
- Решение задач по инженерной графике
- Решение задач по начертательной геометрии
Услуги по выполнению чертежей:
- Заказать чертежи
- Помощь с чертежами
- Заказать чертеж в компасе
- Заказать чертеж в автокаде
- Заказать чертежи по инженерной графике
- Заказать чертежи по начертательной геометрии
- Заказать черчение
Учебные лекции:
- Инженерная графика
- Начертательная геометрия
- Оформление чертежей
- Чертеж общего вида и сборочный чертеж
- Техническое рисование
- Машиностроительные чертежи
- Геометрические построения
- Деление окружности на равные части
- Сопряжение линий
- Коробовые кривые линии
- Построение уклона и конусности
- Лекальные кривые
- Параллельность и перпендикулярность
- Методы преобразования ортогональных проекций
- Поверхности
- Способы проецирования
- Метрические задачи
- Способы преобразования чертежа
- Кривые линии
- Кривые поверхности
- Трёхгранник Френе
- Проецирование многогранников
- Проецирование тел вращения
- Развёртывание поверхностей
- Проекционное черчение
- Проецирование
- Проецирование точки
- Проецирование отрезка прямой линии
- Проецирование плоских фигур
- Способы преобразования проекций
- Аксонометрическое проецирование
- Проекции геометрических тел
- Сечение геометрических тел плоскостями и развертки их поверхностей
- Сечение полых моделей
- Разрезы
- Требования к чертежам деталей
- Допуски и посадки
- Шероховатость поверхностей и обозначение покрытий
- Разъемные и неразъемные соединения деталей
- Передачи и их элементы
По вопросам репетиторства по начертательной геометрии, вы можете связаться любым удобным способом в разделе Контакты. Возможно очное и дистанционное обучение по Skype: 1250 р./ак.ч.
7.1. Поверхности. Образование и задание поверхности на чертеже
Поверхности составляют широкое многообразие объектов трехмерного пространства. Инженерная деятельность человека связана непосредственно с проектированием, конструированием и изготовлением различных поверхностей. Большинство задач прикладной геометрии сводится к автоматизации проектно-конструкторского процесса и воспроизведения сложных поверхностей. Способы формообразования и отображения поверхностей составляют основу инструментальной базы трехмерного моделирования современных систем автоматизированного проектирования.
Рассматривая поверхности как непрерывное множество точек, между координатами которых может быть установлена зависимость, определяемая уравнением вида F(x,y,z)=0, можно выделить алгебраические поверхности (F(x,y,z)— многочлен n-ой степени и трансцендентные (F(x,y,z)— трансцендентная функция.
Если алгебраическая поверхность описывается уравнением n-й степени, то поверхность считается поверхностью n-го порядка. Произвольно расположенная секущая плоскость пересекает поверхность по кривой того же порядка (иногда распадающейся или мнимой), какой имеет исследуемая поверхность. Порядок поверхности может быть определен также числом точек её пересечения с произвольной прямой, не принадлежащей целиком поверхности, считая все точки (действительные и мнимые).
Поверхность можно рассматривать, как совокупность последовательных положений l1,l2… линии l перемещающейся в пространстве по определенному закону (Рисунок 7.1). В процессе образования поверхности линия l может оставаться неизменной или менять свою форму — изгибаться или деформироваться. Для наглядности изображения поверхности на эпюре Монжа закон перемещения линии l целесообразно задавать графически в виде одной линии или целого семейства линий (m, n, p…).
Подвижную линию принято называть образующей (li), неподвижные – направляющими (m). Такой способ образования поверхности принято называть кинематическим.
Примером такого способа могут служить все технологические процессы обработки металлов режущей кромкой, когда поверхность изделия несёт на себе «отпечаток» режущей кромки резца, т.е. её поверхность можно рассматривать как множество линий конгруэнтных профилю резца.
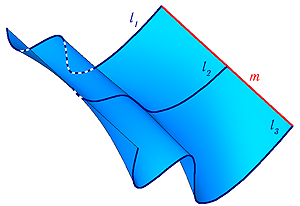
Рисунок 7.1 — Кинематическая поверхность
По виду образующей различают поверхности линейчатые и нелинейчатые, образующая первых – прямая линия, вторых – кривая.
Линейчатые поверхности в свою очередь разделяют на развертывающиеся, которые можно без складок и разрывов развернуть на плоскость и неразвертывающиеся.
Значительный класс поверхностей формируется движением окружности постоянного или переменного радиуса. Такие поверхности носят название циклические (Рисунок 7.2).
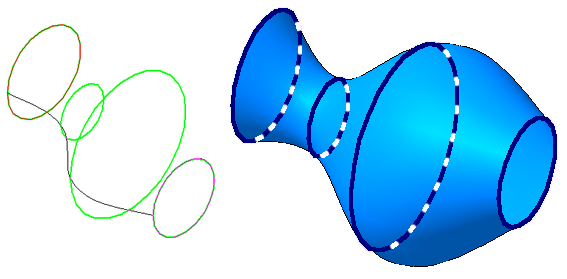
Рисунок 7.2 — Циклическая поверхность
Если группировать поверхности по закону движения образующей линии, то большинство встречающихся в технике поверхностей можно разделить на:
- поверхности вращения;
- винтовые поверхности;
- поверхности с плоскостью параллелизма;
- поверхности параллельного переноса.
Особое место занимают такие нелинейные поверхности, образование которых, не подчинено ни какому закону. Оптимальную форму таких поверхностей определяют теми физическими условиями, в которых они работают и устанавливают форму экспериментально (поверхности лопастей турбин, обшивка каркасов морских судов и самолетов).
Для графического изображения поверхности на чертеже используется её каркас.
Множество линий, заполняющих поверхность так, что через каждую точку поверхности проходит в общем случае одна линия этого множества, называется каркасом поверхности.
Поверхность может быть задана и конечным множеством точек, которое принято называть точечным каркасом.
Проекции каркаса могут быть построены, если задан определитель поверхности – совокупность условий, задающих поверхность в пространстве и на чертеже.
Различают две части определителя: геометрическую и алгоритмическую.
Геометрическая часть определителя представляет собой набор постоянных геометрических элементов (точек, прямых, плоскостей и т.п.), которые могут и не входить в состав поверхности.
Вторая часть – алгоритмическая (описательная) – содержит перечень операций, позволяющий реализовать переход от фигуры постоянных элементов к непрерывному каркасу.
Например, циклическая поверхность, каркас которой состоит из восьмиугольников (Рисунок 7.3), может быть задан следующим образом:
- Геометрическая часть определителя: три направляющих l, m, n.
- Алгоритмическая часть: выбираем плоскость α; находим точки А, В, С, в которых α пересекает соответственно направляющие l, m, n. Строим восьмиугольник, определяемый тремя найденными точками. Переходим к следующей плоскости и повторяем построение
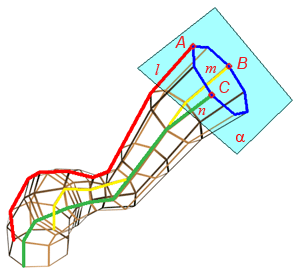
Рисунок 7.3 –Образование циклической поверхности
7.2. Поверхности вращения
Поверхностями вращения называются поверхности, полученные вращением образующей вокруг неподвижной оси (Рисунок 7.5).
Цилиндрическая и коническая поверхности бесконечны (т.к. бесконечны образующие); сферическая, торовая поверхности — конечны.
Сферическая поверхность – частный случай торовой поверхности. При вращении окружности вокруг осей б, в, г (Рисунок 7.4, а) получим торовую поверхность (Рисунок 7.4, б), а вокруг оси а – сферическую.
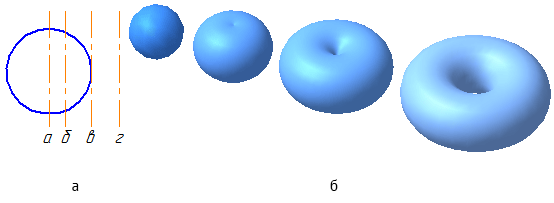
Рисунок 7.4 – Образование поверхностей вращения
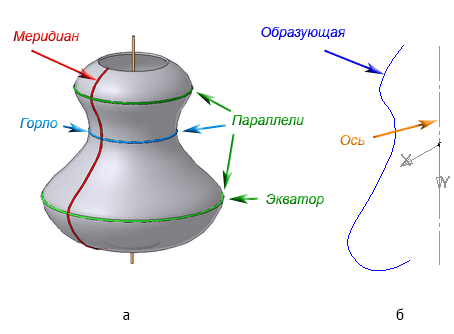
Рисунок 7.5 – Элементы поверхности вращения
Каждая точка образующей линии при вращении вокруг оси описывает окружность, которая располагается в плоскости, перпендикулярной оси вращения. Эти окружности называются параллелями (Рисунок 7.5).
Наименьшая параллель называется горлом, наибольшая – экватором.
Линия пересечения поверхности вращения плоскостью, проходящей через ось, называется меридианом.
Линия пересечения поверхности вращения плоскостью, проходящая через ось, параллельно фронтальной плоскости проекций, называется главным меридианом.
7.3. Цилиндрическая поверхность
Цилиндрическая поверхность образуется движением прямой линии, которая в любом своём положении параллельна данному направлению и пересекает криволинейную направляющую (Рисунок 7.6).
Цилиндр – геометрическое тело, ограниченное замкнутой цилиндрической поверхностью и двумя параллельными плоскостями, пересекающими все образующие данной поверхности.
Взаимно параллельные плоские фигуры, ограниченные цилиндрической поверхностью, называются основаниями цилиндра.
Если нормальное сечение (плоскость сечения перпендикулярна образующим) имеет форму окружности, то цилиндрическая поверхность называется круговой.
Если образующие цилиндрической поверхности перпендикулярны к основаниям, то цилиндр называется прямым, в противном случае – наклонным.
Рассмотрим проецирование прямого кругового цилиндра и принадлежащей ему точки F.
Условимся, что фронтальная проекция точки F – невидима (Рисунок 7.6).
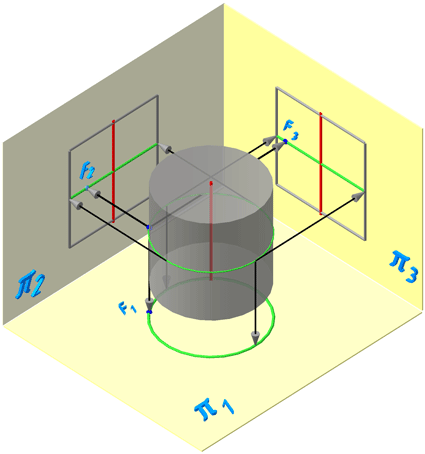
Рисунок 7.6 – Проецирование цилиндра на плоскости проекций
Горизонтальная и профильная проекции точки F будут видимы.
При определении видимости, образующие, которые находятся на части, обращённой к наблюдателю и обозначенной на π1 сплошной зелёной линией – на плоскости проекции π2 видны, а которые находятся на части, обозначенной толстой штриховой линией – видны на π3.
Пусть точка А на π2 видима (Рисунок 7.7). Тогда на π1 она будет видима, а на π3 невидима.
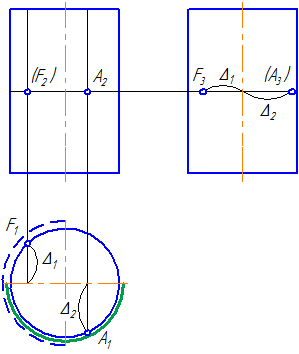
Рисунок 7.7 – Эпюр прямого кругового цилиндра и принадлежащих ему точек
7.4. Пересечение прямой с поверхностью прямого кругового цилиндра
Для построения точек пересечения прямой линии с поверхностью прямого кругового цилиндра не требуется дополнительных построений. На горизонтальной плоскости проекций точки пересечения (1 и 2) находятся сразу. Фронтальные проекции строим по линиям связи.
Но в общем случае, алгоритм решения рассмотрим на следующем упражнении.
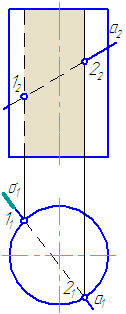
Рисунок 7.8 – Пересечение прямой с поверхностью прямого кругового цилиндра
Упражнение
Заданы: прямой круговой цилиндр с осью вращения, перпендикулярной плоскости проекций π1 и прямая а общего положения (Рисунок 7.8).
Построить точки пересечения прямой а с поверхностью цилиндра.
Решение:
Для построения точек пересечения прямой с поверхностью цилиндра необходимо:
- Заключить прямую во вспомогательную секущую плоскость частного положения σ (горизонтально-проецирующую).
- Построить фигуру пересечения поверхности цилиндра горизонтально-проецирующей плоскостью: результат пересечения — четырехугольник (на π2 условно заштрихован).
- Найти точки «входа» и «выхода» прямой: на пересечении её фронтальной проекции с фронтальными проекциями сторон четырёхугольника (они же — проекции образующей цилиндра);
Прямая а пересекается со сторонами сечения в двух точках – 1 и 2.
Определим видимость участков прямой: очевидно, что между точками 1-2 прямая невидима, а на плоскости проекций π2 будет ещё невидим участок прямой от точки 1 до левой крайней образующей.
7.5. Пересечение прямой с поверхностью наклонного цилиндра
Упражнение
Заданы: наклонный круговой цилиндр с осью вращения, наклонной к плоскости проекций π1 и прямая mобщего положения (Рисунок 7.9).
Построить точки пересечения прямой mс поверхностью цилиндра.
Решение:
Для построения точек пересечения прямой с поверхностью цилиндра необходимо:
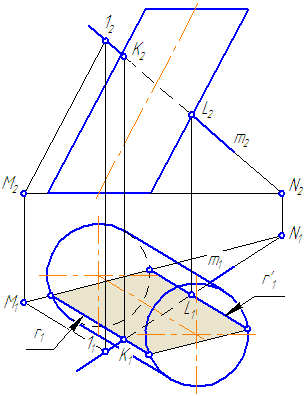
Рисунок 7.9 – Пересечение прямой с наклонным цилиндром
- Заключить прямую m во вспомогательную плоскость σ, дающую в сечении наиболее простую фигуру – четырехугольник (σ параллельна оси цилиндра или образующим). Эту плоскость зададим двумя пересекающимися прямыми m∩(1M);
- Построить горизонтальный след плоскости σ (прямую пересечения σ с плоскостью проекций π1) как проходящую через горизонтальные следы прямых m и (1M) (точки пересечения прямых с плоскостью проекций π1 (основания)) – (MN);
- Найти точки пересечения MN с окружностью основания цилиндра. Через эти точки провести образующие r, по которым плоскость σ пересекает боковую поверхность цилиндра:
На анимации ниже представлена последовательность построения точек пересечения прямой с наклонным цилиндром.
7.6. Сферическая поверхность
Сферическая поверхность – поверхность, образованная вращением окружности вокруг отрезка, являющегося её диаметром.
Шаром называется тело, ограниченное сферической поверхностью.
Экватор – это окружность, которая получается пересечением сферы горизонтальной плоскостью, проходящей через ее центр (Рисунок 7.10).
Меридиан – это окружность, которая получается пересечением сферы плоскостью, перпендикулярной плоскости экватора и проходящей через центр сферы.
Параллелями называются окружности, которые получаются пересечением сферы плоскостями, параллельными плоскости экватора.
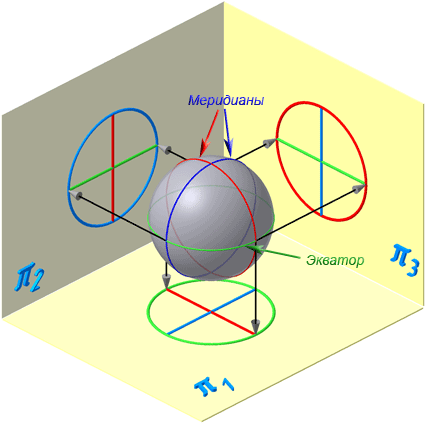
Рисунок 7.10 – Проецирование сферической поверхности
Прямоугольная проекция шара (сферы) на любую плоскость – есть окружность, которую часто называют очерковой.
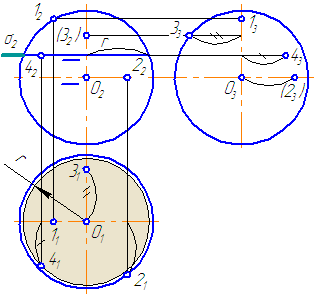
Рисунок 7.11 – Эпюр сферы и принадлежащих ей точек
Упражнение
Заданы: сферическая поверхность тремя проекциями (Рисунок 7.11) и фронтальные проекции точек 1, 2, 3, 4.
Необходимо построить горизонтальные и профильные проекции заданных точек.
Решение.
- Проанализируем их расположение на поверхности сферы. Точки 1, 2, 3 лежат на очерковых образующих сферы.
- Точка 1 принадлежит главному меридиану (очерковой окружности на π2), проекция которого на π1 совпадает с проекцией горизонтальной оси, на π3 – с проекцией вертикальной оси.
- Недостающие проекции точки 1 находим посредством линий проекционной связи. Все проекции точки 1 видимы.
- Рассмотрим положение точки 2. Точка 2 принадлежит экватору (очерковой окружности на π1), проекции которого на π2 и π3 совпадают с проекцией горизонтальной оси. Горизонтальная проекция точки 2 строится посредством линии проекционной связи, для построения профильной проекции необходимо измерить расстояние, отмеченное дугой, и отложить его по линии связи от точки О3 вправо. Профильная проекция точки 2 невидима.
- Точка 3 принадлежит очерковой окружности на π3, которая также является меридианом, проекции которого на π2 и π1 совпадают с проекцией вертикальной оси. Профильная проекция точки строится посредством линии проекционной связи. Для построения горизонтальной проекции точки 3 необходимо расстояние, отмеченное на π3 двумя засечками, отложить на π1 вверх от точки О1. Горизонтальная и профильная проекции точки 3 видимы.
- Для построения проекций точки 4 необходимо ввести вспомогательную секущую плоскость (зададим плоскость σ//π1 и σ⊥π2). Плоскость σ пересекает поверхность сферы по окружности радиусом r. На π1 строим данное сечение и по линии проекционной связи находим 41. Для построения профильной проекции необходимо расстояние, отмеченное засечкой, отложить по линии проекционной связи на π3 вправо от оси. Все проекции точки 4 видимы.
7.7. Пересечение прямой с поверхностью сферы
Упражнение
Заданы: сфера и прямая общего положения АВ.
Найти: точки пересечения прямой с поверхностью сферы (точки «входа» и «выхода»).
Чтобы найти точки пересечения прямой с поверхностью сферы необходимо:
- Заключить прямую во вспомогательную плоскость, пересекающую поверхность сферы так, чтобы получались простые фигуры (например, круг, ограниченный окружностью);
- Построить фигуру пересечения сферы вспомогательной плоскостью;
- Найти общие точки прямой и контура фигуры (окружность): так как прямая и окружность лежат в одной плоскости, то они, пересекаясь, образуют точки, общие для прямой и сферы, которые и будут являться искомыми точками (Рисунок 7.12).
Решение
- Через прямую проводим плоскость σ. Пусть σ⊥π1 и пересекает сферу по окружности радиусом r. С – центр окружности сечения ОС⊥σ:
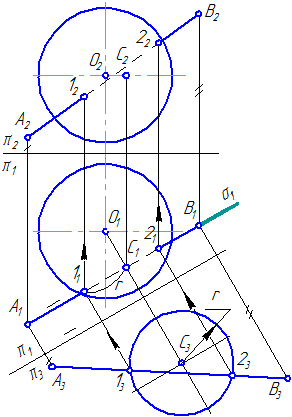
Рисунок 7.12 – Пересечение прямой с поверхностью сферы
- Введём π3⊥π1 и π3//σ1. Построим проекцию окружности сечения на π3 и проекцию А3В3.
- Находим точки их пересечения 12 и 23.
- Определим видимость участков прямой.
- На π1 точки 1 и 2 находятся на переднем полушарии, следовательно, на π2 они видимы.
7.8. Коническая поверхность
Коническая поверхность образуется движением прямой линии (образующей), которая в любом своем положении проходит через неподвижную точку и пересекает криволинейную направляющую (имеет две полости).
Тело, ограниченное замкнутой конической поверхностью вершиной и плоскостью, называется конусом.
Плоская фигура, ограниченная конической поверхностью, называется основанием конуса.
Часть конической поверхности, ограниченная вершиной и основанием, называется боковой поверхностью конуса.
Если основание конуса является кругом, то конус называется круговым.
Если вершина конуса расположена на перпендикуляре к основанию, восстановленному из его центра, то конус называется прямым круговым.
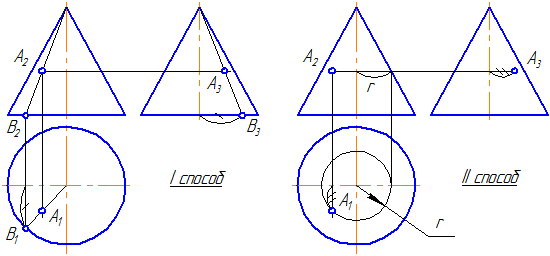
Перемещая точку A» — можно изменять диаметр основания конуса;
перемещая точку O’ — можно менять положение точки на поверхности конуса.
Рисунок 7.13 – Принадлежность точки конической поверхности
Рассмотрим вопрос принадлежности точки А поверхности конуса.
Дана фронтальная проекция точки А и она видима (Рисунок 7.13).
1 способ. Для построения ортогональных проекций точки, расположенной на поверхности конуса, построим проекции образующей, проходящей через данную точку. При таком положении точки А все её проекции – видимы.
2 способ. Точка А лежит на параллели конуса радиусом r. На π1 строим проекцию окружности (параллели) и по линии проекционной связи находим А1. По двум проекциям точки строим третью.
7.9. Пересечение прямой с поверхностью конуса
Пусть задан прямой круговой конус и прямая общего положения m (Рисунок 7.14). Найти точки «входа» и «выхода» прямой с поверхностью конуса.
- Через прямую m проводим вспомогательную секущую плоскость σ, дающую в сечении наиболее простую фигуру.
- Применение в качестве вспомогательной секущей плоскости проецирующей плоскости в данном случае нецелесообразно, так как в сечении получится кривая второго порядка, которую нужно строить по точкам.
Наиболее простая фигура – треугольник. Для этого секущая плоскость σ должна пройти через вершину S. Плоскость зададим с помощью двух пересекающихся прямых σ=SM∩MN или, что, то же самое, (σ=SM∩m).
- Возьмем на прямой m точку А и соединим её с вершиной. Прямая SA пересечёт плоскость основания в точке М.
- Построим горизонтальные проекции этих объектов.
- Продлим фронтальную проекцию прямой m до пересечения с плоскостью основания в точке N.
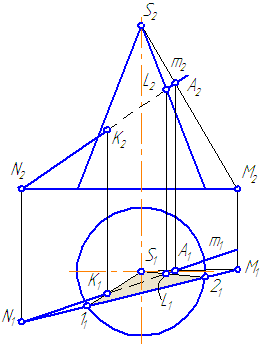
Рисунок 7.14 – Построение точек пересечения прямой с поверхностью конуса
- Построим её горизонтальную проекцию.
- Соединим точки M1N1, на пересечении с окружностью основания получим точки 1 и 2.
- Строим треугольник сечения конуса плоскостью σ, соединив точки 1 и 2 с вершиной S.
- На пересечении образующих 1-S и 2-S с прямой m получим искомые точки K и L.
- Определим видимость прямой относительно поверхности конуса.
На анимации ниже представлена последовательность построения точек пересечения прямой с поверхностью конуса.
7.10. Пересечение цилиндра плоскостью
Пусть плоскость сечения γ – фронтально-проецирующая (Рисунок 7.15).
- Если плоскость сечения γ параллельна оси цилиндра, то она пересекает цилиндр по четырехугольнику.
- Если плоскость сечения γ перпендикулярна оси цилиндра, то она пересекает цилиндр по окружности.
- Если плоскость сечения γ не параллельна и не перпендикулярна оси цилиндра в сечении эллипс.
Рассмотрим алгоритм построения сечения – эллипс (Рисунок 7.15):
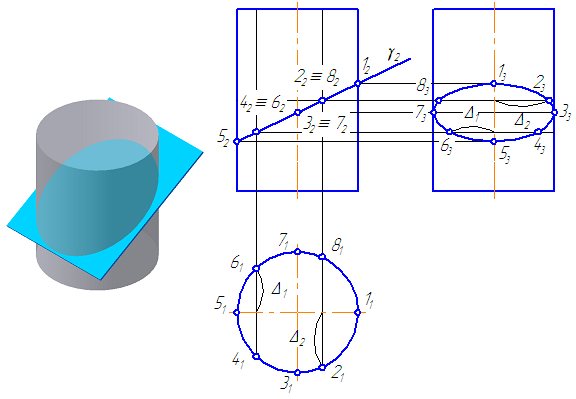
Рисунок 7.15 – пересечение цилиндра плоскостью
- Находим и строим характерные точки (точки, не требующие дополнительных построений) – в нашем случае, точки принадлежащие крайним образующим – 1, 3, 5, 7. Одновременно с этим, данные точки определяют величину большой и малой оси эллипса.
- Для построения участка эллипса необходимо построить не менее 5-ти точек (так как лекальная кривая второго порядка определяется как минимум пятью точками). Для построения точек 2, 4, 6, 8 возьмем на π1 произвольно расположенные образующие цилиндра, которые проецируются на данную плоскость проекции в точки.
- Построим вторые проекции данных образующих. Из точек пересечения вторых проекций образующих с проекцией плоскости сечения γ проводим линии связи к π3. Для построения третьей проекции, например, точки 6 измеряем расстояние Δ1 и откладываем его по соответствующей линии связи на π3. Симметрично ей, относительно оси вращения, строим точку 4. Аналогично строятся другие точки.
7.11. Пересечение сферы плоскостью
Плоскость пересекает поверхность сферы всегда по окружности. Задачу пересечения плоскости со сферой мы рассматривали при решении задачи построения точек пересечения прямой с поверхностью сферы (см. выше).
7.12. Пересечение конуса плоскостью
Рассмотрим пять возможных вариантов расположения плоскости относительно поверхности прямого кругового конуса. Пусть плоскость сечения перпендикулярна плоскости проекций π2 (Рисунок 7.16).
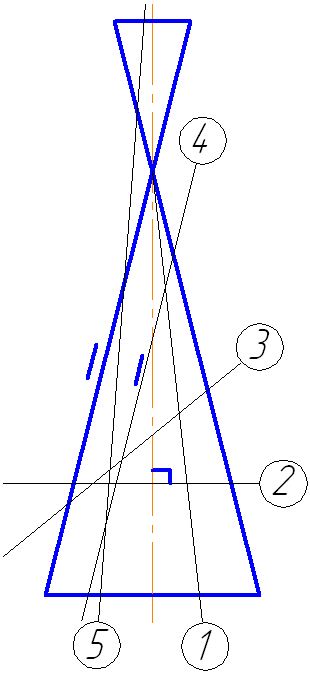
Рисунок 7.16
- Если плоскость проходит через вершину (1) – в сечении две образующие и прямая пересечения с плоскостью основания.
- Если плоскость перпендикулярна оси вращения конуса (2) – в сечении окружность.
- Если плоскость не параллельна ни одной образующей (пересекает все образующие (3)) – в сечении эллипс.
- Если плоскость параллельна одной образующей конуса – в сечении парабола (на примере – плоскость сечения (4) параллельна крайней образующей конуса).
- Если плоскость параллельна двум образующим (пересекает обе полости конической поверхности (5)) – в сечении гипербола (рисунок 7.17).
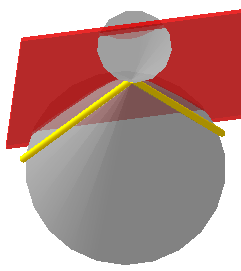
Рисунок 7.17. Плоскость сечения параллельна двум образующим конуса
Ниже, на моделях, представлены варианты положения секущей плоскости относительно поверхности конуса, при которых получаются сечения в виде эллипса, параболы и гиперболы.
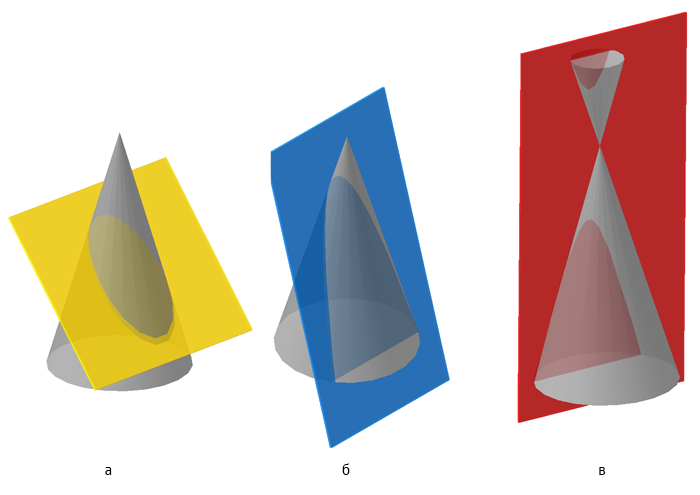
Рисунок 7.18 – Сечение конической поверхности плоскостью (а — эллипс, б — парабола, в — гипербола)
Рассмотрим пример построения сечения конической поверхности плоскостью.
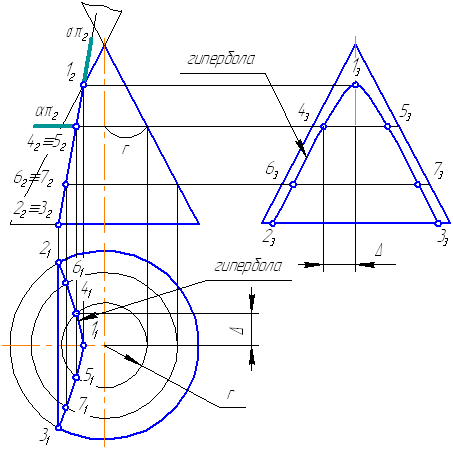
Рисунок 7.19 – Построение пересечения конической поверхности плоскостью
Пусть задана секущая проецирующая плоскость σ⊥π2 (Рисунок 7.19). Если продлить коническую поверхность и проекцию плоскости, то видно, что плоскость пересекает вторую ветвь конической поверхности, следовательно, в сечении получится гипербола.
- Построим характерные точки. Это точки, лежащие на крайних образующих и на окружности основания конуса (1, 2, 3). Их проекции строятся по линиям проекционной связи.
- Для построения промежуточных точек, воспользуемся методом вспомогательных секущих плоскостей. Введём плоскость α⊥π2 и перпендикулярно оси вращения, что даст в сечении окружность радиусом r. Строим эту окружность на π1. Плоскость α пересекает и заданную плоскость сечения по прямой, проекции которой на π1 и π3 совпадают с линиями проекционной связи.
- На пересечении этих двух сечений на плоскости проекций π1 строим точки 4, 5. Профильные проекции этих точек строим по линии проекционной связи, откладывая расстояние от оси вращения конуса, равное Δ.
- Аналогично строим точки 6, 7. Плавно соединим построенные точки, образуя гиперболу.
- Обведём то, что осталось от конуса после такого среза с определением видимости. В нашем примере все проекции построенной кривой будут видимы.
На анимации ниже представлена последовательность построения пересечения конической поверхности плоскостью.
7.13. Задачи для самостоятельной работы
1. Достроить проекции сферы с заданным вырезом (Рисунок 7.20).
Рисунок 7.20
2-3. Построить три проекции конуса с призматическим отверстием (Рисунки 7.21, 7.22).
Рисунок 7.21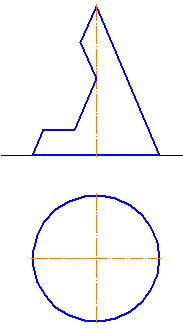
Рисунок 7.22
4. Построить точки «входа» и «выхода» прямой при пересечении её с поверхностью полусферы (Рисунок 7.23).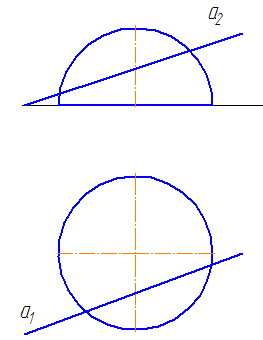
Рисунок 7.23
По вопросам репетиторства по начертательной геометрии, вы можете связаться любым удобным способом в разделе Контакты. Возможно очное и дистанционное обучение по Skype: 1250 р./ак.ч.
