Определение:
Номинальный ток – это допустимые производителем рабочий ток трехфазного электродвигателя для токопроводящих деталей и нагрева изоляции, при котором электромеханическое устройство работает продолжительное время без перегрева обмотки.
Пусковой ток – это потребляемый электрическим устройством максимальный входной импульсный ток при запуске асинхронного двигателя с короткозамкнутым ротором. Вот почему, пусковые токи электродвигателей больше номинальных и могут превышать их в несколько и более раз.
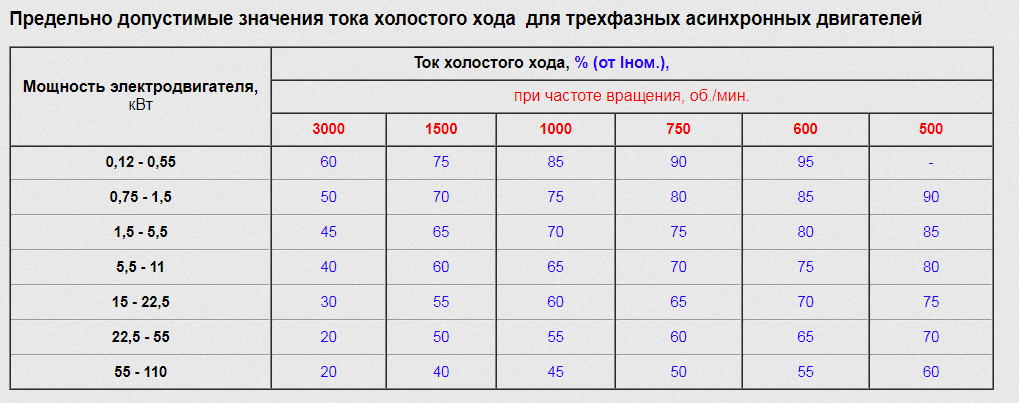
Ток холостого хода электродвигателя – это режим работы без нагрузки на валу от присоединяемого привода. В данном режиме потребляется меньше электрической энергии и поэтому исключено повышение температур выше заявленных изготовителем, что позволит провести диагностику и определить исправность устройства. Ток асинхронного двигателя на холостом ходу в зависимости от мощности и оборотов электромотора составляет 20 – 95% от номинального.
Для того чтобы самостоятельно определить ток электродвигателя без измерений нужно на корпусе устройства найти информационную табличку о токах, мощности, оборотах и напряжению. Если шильдик поврежден – найдите паспорт электромотора. В нем производитель указывает основные параметры: номинальные и пусковые токи асинхронного двигателя.
Если информация по характеристикам отсутствует и найти ток нагрузки электродвигателя не получилось, воспользуйтесь статьей – как определить мощность и обороты электродвигателя без бирки.
Как определить ток электродвигателя если известна мощность?
Как найти номинальный ток двигателя
Зная паспортную мощность, не составит труда рассчитать значения токов электродвигателя. Допустим, нам не известен номинальный ток двигателя 45 кВт – как в таком случае определить ток двигателя по мощности? При подключении к трехфазной сети 380 Вольт определение тока производится по формуле точного расчета:

Iн = 45000/√3(380*0,92*0,85) = 45000/514,696 = 87,43А
- Iн – сила тока асинхронного двигателя
- Pн – номинальная мощность двигателя 45 киловатт
- √3 – квадратный корень из трех = 1,73205080757
- Uн – напряжение сети 380В
- η – коэффициент полезного действия 92% (в расчетах 0,92)
- сosφ – коэффициент мощности 0,85
Как определить номинальный ток электродвигателя, если коэффициент мощности и КПД неизвестны? В этой ситуации, найти номинальный ток двигателя с небольшой погрешностью мы сможем по соотношению – два ампера на одни киловатт. Определить силу тока электродвигателя используя формулу:

Как определить пусковой ток двигателя
Пусковые токи электродвигателей, можно найти и рассчитать по формуле:

Iп – значение тока при запуске асинхронного двигателя, которое необходимо узнать
Iн – уже рассчитанный номинальный ток
К – кратность пускового тока двигателя (найти в паспорте)
Как определить ток электродвигателей АИР?
Если известна маркировка, например у электромотора АИР200L4 Iн = 84,9 Ампер, а соотношение тока Iп/Iн = 7,2. Найдите значение токов в таблицах:
| Электродвигатель | Iн, А | Iп/Iн | Мотор | Iн, А | Iп/Iн |
| АИР56A2 | 0,5 | 5,3 | АИР160M2 | 34,7 | 7,5 |
| АИР56B2 | 0,73 | АИР180S2 | 41 | ||
| АИР63А2 | 1 | 5,7 | АИР180M2 | 55,4 | |
| АИР63B2 | 2,05 | АИР200M2 | 67,9 | ||
| АИР71A2 | 1,17 | 6,1 | АИР200L2 | 82,1 | |
| АИР71B2 | 2,6 | 6,9 | АИР225M2 | 100,0 | |
| АИР80A2 | 3,46 | 7 | АИР250S2 | 135 | 7 |
| АИР80B2 | 4,85 | АИР250M2 | 160 | 7,1 | |
| АИР90L2 | 6,34 | 7,5 | АИР280S2 | 195 | 6,6 |
| АИР100S2 | 8,2 | АИР280M2 | 233 | 7,1 | |
| АИР100L2 | 11,1 | АИР315S2 | 277 | ||
| АИР112M2 | 14,9 | АИР315M2 | 348 | ||
| АИР132M2 | 21,2 | АИР355S2 | 433 | ||
| АИР160S2 | 28,6 | АИР355M2 | 545 |
| Двигатель | Iн, А | Iп/Iн | Электромотор | Iн, А | Iп/Iн |
| АИР56A4 | 0,5 | 4,6 | АИР160S4 | 30 | 7,5 |
| АИР56B4 | 0,7 | 4,9 | АИР160M4 | 36,3 | |
| АИР63A4 | 0,82 | 5,1 | АИР180S4 | 43,2 | |
| АИР63B4 | 2,05 | АИР180M4 | 57,6 | 7,2 | |
| АИР71A4 | 1,17 | 5,2 | АИР200M4 | 70,2 | |
| АИР71B4 | 2,05 | 6 | АИР225M4 | 103 | |
| АИР80A4 | 2,85 | АИР250S4 | 138,3 | 6,8 | |
| АИР80B4 | 3,72 | АИР250M4 | 165,5 | ||
| АИР90L4 | 5,1 | 7 | АИР280S4 | 201 | 6,9 |
| АИР100S4 | 6,8 | АИР280M4 | 240 | ||
| АИР100L4 | 8,8 | АИР315S4 | 288 | ||
| АИР112M4 | 11,7 | АИР315M4 | 360 | ||
| АИР132S4 | 15,6 | АИР355S4 | 360 | ||
| АИР132M4 | 22,5 | АИР355M4 | 559 |
| Электродвигатель | Iн, А | Iп/Iн | Мотор | Iн, А | Iп/Iн |
| АИР63A6 | 0,8 | 4,1 | АИР160M6 | 31,6 | 7 |
| АИР63B6 | 1,1 | 4 | АИР180M6 | 38,6 | |
| АИР71A6 | 1,3 | 4,7 | АИР200M6 | 44,7 | |
| АИР71B6 | 1,8 | АИР200L6 | 59,3 | ||
| АИР80A6 | 2,3 | 5,3 | АИР225M6 | 71 | |
| АИР80B6 | 3,2 | 5,5 | АИР250S6 | 86 | |
| АИР90L6 | 4 | АИР250M6 | 104 | ||
| АИР100L6 | 5,6 | 6,5 | АИР280S6 | 142 | 6,7 |
| АИР112MA6 | 7,4 | АИР280M6 | 169 | ||
| АИР112MB6 | 9,75 | АИР315S6 | 207 | ||
| АИР132S6 | 12,9 | АИР315M6 | 245 | ||
| АИР132M6 | 17,2 | АИР355S6 | 292 | ||
| АИР160S6 | 24,5 | АИР355M6 | 365 |
| Эл двигатель | Iн, А | Iп/Iн | Электромотор | Iн, А | Iп/Iн |
| АИР71B8 | 1,1 | 3,3 | АИР180M8 | 34,1 | 6,6 |
| АИР80A8 | 1,49 | 4 | АИР200M8 | 41,1 | |
| АИР80B8 | 2,17 | АИР200L8 | 48,9 | ||
| АИР90LA8 | 2,43 | АИР225M8 | 60 | 6,5 | |
| АИР90LB8 | 3,36 | 5 | АИР250S8 | 78 | 6,6 |
| АИР100L8 | 4,4 | АИР250M8 | 92 | ||
| АИР112MA8 | 6 | 6 | АИР280S8 | 111 | 7,1 |
| АИР112MB8 | 7,8 | АИР280M8 | 150 | 6,2 | |
| АИР132S8 | 10,3 | АИР315S8 | 178 | 6,4 | |
| АИР132M8 | 13,6 | АИР315M8 | 217 | ||
| АИР160S8 | 17,8 | АИР355S8 | 261 | ||
| АИР160M8 | 25,5 | 6,5 | – | – | – |
* Для перехода ко всем характеристикам товара – нажмите на маркировку.
Таблица токов холостого хода асинхронного электродвигателя
| Мощность электродвигателя, кВт | Процентное соотношение от номинального тока | |||||
| Токи асинхронного двигателя на холостом ходу при известной частоте вращения вала, об/мин | ||||||
| 3000 | 1500 | 1000 | 750 | 600 | 500 | |
| 0,12 – 0,55 | 60 | 75 | 85 | 90 | 95 | – |
| 0,75 – 1,5 | 50 | 70 | 75 | 80 | 85 | 90 |
| 2,2 – 5,5 | 45 | 65 | 70 | 75 | 80 | 85 |
| 7,5 – 11 | 40 | 60 | 65 | 70 | 75 | 80 |
| 15 – 22 | 30 | 55 | 60 | 65 | 70 | 75 |
| 30 – 55 | 20 | 50 | 55 | 60 % | 65 | 70 |
| 75 – 110 | 20 | 40 | 45 | 50 | 55 | 60 |
Чтобы рассчитать ток при холостом ходе двигателя 55 кВт – в правой колонке таблице найдите нужную мощность, а в левом номинальную скорость вращения, например 750 оборотов. Руководствуясь данными из таблицы токов холостого хода мы получаем значение в 60 процентов от номинального. Итого: ток холостого хода будет равен 4,26 Ампер.
Не получилось определить силу тока двигателя?
Если у Вас не получилось самостоятельно рассчитать ток трехфазного электродвигателя или Вы не смогли найти мотор из каталога с нужными параметрами – обратитесь к нам для получения бесплатной консультации. Мы всегда готовы помочь правильно подобрать и купить электродвигатель АИР под технический процесс Вашего производства.
Иногда случается, что вам нужно узнать мощность какого-то электродвигателя, а на шильдике она стёрлась или вообще не указана, или нужно узнать ток, а на шильдике удалось найти только мощность. Но простой формулы P=UI здесь недостаточно.
Поэтому давайте поговорим о расчёте мощности трёхфазного асинхронного электродвигателя при разных известных вводных.
Общие сведения
Сначала посмотрим на табличку двигателя (она же шильдик или бирка).
Что мы здесь видим:
- Схемы подключения (треугольник и звезда).
- Номинальные напряжения при соединении треугольником и звездой.
- Номинальные токи при соединении треугольником и звездой.
- Мощность.
- Коэффициент полезного действия (КПД) также может обозначаться буквой η (греческая «эта»).
- CosФ – коэффициент мощности (отношение активной мощности к полной).
Теперь по поводу мощности обратимся к ГОСТ IEC 60034-1-2014, к пунктам 3.2, 3.3 и 5.5.3:
А в пункте 10.2 перечислены данные, которые должны быть указаны на табличках электродвигателей, в пункте перечисления k сказано: «номинальная(ые) мощность(и) или диапазон номинальной мощности.»
Из этого, думаю, понятно, что на табличках указывается именно механическая мощность.
Ещё нам нужно запомнить одну формулу:
Это формула активной мощности трёхфазного электродвигателя, где: U — номинальное напряжение (линейное), I — номинальный ток (линейный) cosФ — коэффициент мощности, η — коэффициент полезного действия.
Теперь давайте разбираться с формулой и расчётами!
Если известен ток, но неизвестна мощность
Представим, что на нашем шильдике от времени затёрлась и исчезла мощность, но вам зачем-то очень понадобилось её найти, тогда нужно посмотреть на номинальные напряжение и ток для соответствующей схемы соединения (пусть у нас будет звезда).
Тогда если мы умножим номинальное напряжение на номинальный ток и на корень из 3 мы получим полную мощность S:
Если получившийся результат умножим на cosФ, то получим активную мощность. cosФ мы можем посмотреть на шильдике или в справочниках, у нас он 0,87:
Теперь умножим активную мощность на КПД и получим механическую мощность:
Расчёты дали 22 010 Вт или 22 кВт, и это совпадает с тем, что изначально было указано на шильдике.
Если известна мощность, но нужно найти ток
Вторая ситуация, когда вам понадобилось узнать номинальный ток, но взглянув на шильдик, вы смогли прочитать только мощность, кпд и cosФ.
В таком случае из следующей формулы нужно выразить силу тока I:
Примечание — мощность часто указывают в киловаттах, нужно её перевести в ватты (умножить на 1000).
Мы получили номинальный ток для схемы соединения звездой в 43А, что сходится с тем, что было указано на шильдике изначально.
Если на двигателе нет таблички
На практике случается и такое, что есть электродвигатель, но его параметры неизвестны, поскольку на нём нет таблички или же она есть, но на ней нет никаких данных. Для этого можно измерить размеры вала или креплений двигателя, а далее воспользоваться каталогами двигателей конкретной серии. Например, для двигателей серии АИР есть такая таблица:
Нужно измерить диаметр вала и тогда можно определить мощности. Что нужно учесть?
- С одним и тем же диаметром вала производятся двигатели разной мощности.
- У двигателей с малым числом оборотов больше крутящий момент при той же мощности. Соответственно для привода в движения нагрузки не получится использовать один и тот же вал. Поэтому двигатель одной мощности может быть с разным диаметром вала, при этом чем меньше число оборотов, тем толще вал.
Следовательно, чтобы определить мощность таким способом нужно знать обороты, их вы можете либо просто замерить, запустив двигатель, либо разобрать двигатель и посмотреть обмотки и количество пазов на статоре.
Подведём итоги
Целью статьи было показать читателю, как найти мощность или ток электродвигателя, если неизвестен один из параметров, а также напомнить основную формулу для трёхфазных нагрузок из курса ТОЭ. При этом необязательно что вы узнаете его из таблички, например, ток можно измерить во время работы, но учитывайте, что потребляемый электродвигателем ток изменяется при изменении нагрузки. Поэтому ток двигателя на холостом ходу будет меньше, он может быть в диапазоне 20-80% от номинального, в зависимости от оборотов и мощности. Если двигатель перегружен, то ток будет выше номинального и расчёты тоже не дадут точных значений. Кроме этого был рассмотрен один более «практичный» способ.
Если у вас остались вопросы или хотели бы увидеть статью на какую-то интересующую вас тему, делитесь этим в обсуждениях.
Алексей Бартош специально для ЭТМ
Реактивная
составляющая тока холостого хода
асинхронного двигателя:
![]()
А.
(1.6.1)
Для
определения активной составляющей
тока холостого тока асинхронного
двигателя необходимо предварительно
вычислить массу стали статора и потери
в них.
Масса
стали пакета статора включает в себя:
массу
зубцов статора
![]()
![]()
кг,
(1.6.2)
массу
сердечника статора
![]()
кг,
(1.6.3)
где
![]()
,м – диаметр окружности основания пазов
статора.
Магнитные
потери в стали статора трехфазного
асинхронного двигателя состоят из:
потерь
в зубцах статора
![]()
Вт
(1.6.4)
и
потерь в сердечнике статора
![]()
Вт,
(1.6.5)
где
![]()
–
удельные потери в стали статора (Вт/кг)
при
![]()
Тл
и
![]()
50Гц
или 400Гц (приложение 5).
Тогда
общие магнитные потери в стали статора:
![]()
Вт.
(1.6.6)
Потери
в меди обмотки статора при холостом
ходе
![]()
Вт.
(1.6.7)
Потери
на трение в шарикоподшипниках можно
приближенно определить по формуле
![]()
Вт,
(1.6.8)
где
![]()
– коэффициент берётся по опытным данным;
большее его значение относится к меньшим
мощностям;
масса
ротора с беличьей клеткой
![]()
кг,
(1.6.9)
при
этом
![]()
![]()
–
средняя объёмная масса ротора.
Потери
на трение ротора о воздух не поддаются
точному учёту; для электродвигателей
при скоростях вращения ротора примерно
до 12000 об/мин их можно приближенно
определить по следующей формуле:
![]()
Вт.
(1.6.10)
Полные
механические потери в двигателе
![]()
Вт.
(1.6.11)
Электрические,
магнитные и механические потери
холостого хода двигателя
![]()
Вт.
(1.6.12)
Активная
составляющая тока холостого хода
двигателя
![]()
А,
(1.6.13)
где
![]()
– напряжение фазы при соединении обмоток
статора по схеме «звезда»;
![]()
–
при схеме «треугольник».
Ток
холостого хода двигателя
![]()
А.
(1.6.14)
Активное
сопротивление намагничивающего контура,
эквивалентное магнитным потерям в
стали статора
![]()
Ом.
(1.6.15)
1.7. Ток короткого замыкания и пусковой момент
электродвигателя.
Эквивалентные
активное и индуктивное сопротивления
намагничивающего контура и короткозамкнутой
обмотки ротора при неподвижном состоянии
последнего имеют вид:

Ом,
(1.7.1)

Ом.
(1.7.2)
Активное,
индуктивное и полное сопротивления
короткого замыкания одной фазы двигателя:
![]()
Ом,
(1.7.3)
![]()
Ом,
(1.7.4)
![]()
Ом.
(1.7.5)
Пусковой
фазный ток и коэффициент мощности
трехфазного двигателя:
![]()
А,
(1.7.6)
![]()
,
(1.7.7)
где
– при схеме «треугольник»;
–
при схеме «звезда».
Пусковой
момент трёхфазного двигателя:
Нм,
(1.7.8)
где
угловая синхронная частота вращения
![]()
,
(1.7.9)
![]()
.
(1.7.10)
1.8. Мощности потерь и коэффициент полезного действия
электродвигателя.
Мощности
потерь в трёхфазных асинхронных
электродвигателях малой мощности
слагаются из следующих видов:
-
потерь
в меди обмоток статора и ротора
двигателя; -
магнитных
потерь на гистерезис и вихревые токи
в стали статора; -
механических
потерь (трение в подшипниках, ротора
о воздух); -
добавочных
потерь.
Потери
в меди обмотки статора двигателя:
![]()
Вт.
(1.8.1)
Потери
в обмотке ротора двигателя:
![]()
Вт.
(1.8.2)
Общие
потери в двигателе при нагрузке:
![]()
Вт,
(1.8.3)
коэффициент
![]()
учитывает добавочные потери в двигателе.
Потребляемая
асинхронным двигателем из сети активная
мощность:
![]()
Вт,
(1.8.4)
К.п.д.
и коэффициент мощности трехфазного
двигателя
![]()
,
(1.8.5)
![]()
,
(1.8.6)
![]()
.
(1.8.7)
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
УДК 62-835 https://doi.org/10.18503/2311-8318-2020-3(48)-52-58
Лебедев Г.Г.1, Сарваров A.C.2, Вечеркин М.В.2, Петушков М.Ю.2, Косматов В.И.2
1 ООО «Челябинский тракторный завод – УРАЛТРАК»
2 Магнитогорский государственный технический университет им. Г.И. Носова
Определение тока холостого хода асинхронного электродвигателя
В настоящее время в связи с устойчивой тенденцией применения АД практически во всех отраслях промышленности часто возникает необходимость в определении параметров двигателя, которых нет в среде справочных данных. Требуются знания параметров АД в различных режимах работы: холостой ход, номинальный режим, произвольный нагрузочный режим, пусковой режим. Их расчет базируется на схемах замещения, точность расчета параметров которых во многом зависит от точности расчета тока и потерь холостого хода. В данной статье рассмотрен ряд известных в теории и практике электрических машин методик расчета тока и потерь холостого хода. Проведено обоснование возможности расчета тока холостого хода на основе баланса реактивной мощности АД для номинального режима по паспортным данным двигателя. Получено рациональное выражение для расчета тока холостого хода. Рассмотренные методы расчета тока холостого хода и данные, приведенные в справочной литературе, исследованы применительно к двум типам АД из группы мощности до 100 кВт и мощностью 1000 кВт. В рамках исследования проведены расчеты тока холостого хода по паспортным данным рассмотренных двигателей и дана оценка полученных результатов. Установлено, что выражение для расчета тока холостого хода, полученное из условия баланса реактивной мощности в номинальном режиме, дает наиболее близкие значения к результатам расчета с использованием базового метода, основанного на данных для номинального режима и их величин при частичных нагрузках на двигатели.
Ключевые слова- асинхронный двигатель, параметры, энергетическая диаграмма, номинальный режим, частичная нагрузка, ток холостого хода, методы расчета, расчетные графики, кривые энергетических показателей, табличные данные, баланс реактивной мощности, сопоставление результатов.
Введение
Преобладающее применение асинхронных двигателей (АД) практически во всех отраслях промышленности стало неоспоримым фактом. К известным достоинствам АД добавились преимущества, обусловленные применением современных полупроводниковых устройств.
Доля асинхронных электроприводов в 1995 году составляла 75%, а в 2002 году – 85% [1]. На крупнейшем металлургическом предприятии ПАО «ММК» доля электроприводов переменного тока в 2012 году составила 82% [2].
По экспертным оценкам в Российской Федерации число асинхронных двигателей составляет 230-270 млн единиц [3]. На долю трехфазных АД напряжением 380 В приходится около 50 млн единиц. Ежегодный выход асинхронных электродвигателей из строя составляет не менее 10-12% [4] и по информации из других источников может достигать 20-25%. Особенно высока доля выхода АД в сельском хозяйстве, где квалификация электротехнического персонала недостаточно высокая.
Обеспечение надежной эксплуатации электроприводов с асинхронными двигателями, особенно тех, которые прошли многократные ремонты, требует знания параметров в различных режимах работы: холостой ход, номинальный режим, произвольный нагрузочный режим, пусковой режим. Для исследования эксплуатационных режимов АД используются рабочие и механические ха -рактеристики, которые определяются экспериментально или рассчитываются на основе схемы замещения. При этом из существующего разнообразия схем замещения АД предпочтение отдается Т-образной схеме.
При отсутствии данных каталога или отклонениях
© Лебедев Г.Г., Сарваров a.C., Вечеркин М.В., Петушков М.Ю., Косматов В.И., 2020
некоторых из них от паспортных параметры АД могут определяться без проведения полных испытаний на основе аналитических или графоаналитических методов расчета с использованием табличных данных, кривых и коэффициентов, полученных на основе обобщения огромного опыта эксплуатации АД [5-8].
Иногда выдаваемая заводом-изготовителем информация о параметрах АД недостаточна и требует проведения дополнительных исследований. В таких случаях стоимость испытаний АД увеличивается на 10-15% [9]. Действительно, проведение полных испытаний, регламентированных для асинхронных двигателей в ГОСТ 7217-87, является весьма затратным мероприятием с привлечением специализированных организаций с соответствующими лицензиями. Достаточно громоздкими являются также исследования АД в опыте холостого хода [10], где предложено использовать нелинейность кривой намагничивания для расчета параметров схемы замещения. В [11] приведена методика с использованием относительных единиц, что несколько усложняет процедуру расчетов.
Постановка задачи
В настоящее время существует большое многообразие подходов к определению параметров Т-образной схемы замещения АД и каждый из них дает приближенные значения параметров, точность которых не всегда определена. Для снижения погрешности при определении параметров схемы замещения следует использовать точное значение 10. В этой связи в данной статье ставится задача проанализировать известные методы расчета тока холостого хода и на этой основе обосновать наиболее рациональный подход к его определению без проведения специальных опытов.
Величина этого тока является не только одним из базовых параметром для расчета параметров Т-образной схемы замещения, но и одним из главных диагностических признаков технического состояния АД.
Методы исследования и результаты
Предлагается определить ток холостого хода раз -личными методами для двигателей из разных групп мощностей:
– до 100 кВт с напряжением 0,38 кВ (это двигатели массового применения);
– для мощных двигателей (обычно это высоковольтные двигатели).
Типы и паспортные данные электродвигателей, выбранных для исследования, приведены в табл. 1.
Таблица 1
Паспортные данные АД
Двигатель 4А225М4У3 Двигатель А4-450У4ВУ3
Р2н=55 кВт «¡=1500 об/мин ^„=0,38 кВт; 8Н=0,02 ^„=0,925; со8фн=0,9 /п //н=7 Мп /М„=1,2 Мк /Мн=2,2 Р2н =1000 кВт «!=1500 об/мин ^„=6 кВт; 8Н=0,012 ^„=0,955; со8фн=0,89 /1н=113 А /п //„=5,7 Мк /М„=2,1
Активные потери холостого хода (мощность холостого хода)
_ Рэл1(0) + Рш + Рдоб .
(3)
Эта мощность составляет определенную долю от суммарных потерь мощности в двигателе [5, 12]:
Р0 = М^н).
(4)
Соотношение (4) получено исходя из того, что для АД основного применения наибольший КПД достигается при нагрузке на 15-20% меньше номинальной [12].
Для АД более ранних серий или в тех случаях, когда характер изменения КПД по каталогу трудно выявить, приближенное значение определяется по данным табл. 2.
Величина реактивной мощности холостого хода может быть рассчитана по выражению [7]
Исследования методик определения параметров холостого хода
1. Метод на основе энергетической диаграммы, паспортных данных и расчетного графика т=Хс°5ф1н ).
В теории электрических машин традиционно сложился подход, основанный на применении энергетической диаграммы. Энергетическая диаграмма АД (рис. 1) дает наглядную картину преобразования и распределения потока потребляемой из сети электрической энергии Р1.
Суммарные потери в двигателе в номинальном режиме согласно диаграмме представляются выражением
^Хдв(н) _ Рэл1 + Рш + Рэл2 + Рмех + Рдоб.
(1)
По паспортным данным суммарные потери в номинальном режиме определяются с учетом номинального значения КПД:
Р = Р
Едв(н) 1 2н
Статор
(л ^
1 -лн
(2)
т
т
р
1 эм 1
Ротор
Т
Р
1 мх
Т
Р,
Рэп! Рм
Рэл2
Рис. 1. Энергетическая диаграмма АД: Р1 – активная мощность, потребляемая из сети; Рэм – мощность, передаваемая от статора к ротору; Рмх – полная механическая мощность; Р2 – механическая мощность на валу двигателя; рэл1 – электрические потери в обмотке статора; рм – потери в сердечнике статора (магнитные потери); рэл2 – электрические потери в обмотке ротора; Рмех – механические потери; рдоб – добавочные потери (принимаются равными 0,005Р2н)
о = р т
^¿0 1 2н ‘
(5)
где т — расчетный параметр.
Величина т устанавливает связь между активной составляющей номинального тока статора АД и током холостого хода:
1п
т = –
/1н со!3 ЧЪ
(6)
Так как величина 10 в каталожных данных не задается, то предложено пользоваться расчетным графиком т=/(ао ф1н), приведенным на рис. 2.
Пользуясь расчетным графиком, по паспортному значению со5ф1Н предварительно определяется параметр т, по величине которого на основе (5) и (6) рассчитываются 00 и 10.
Определение соотношения Рц/Р^„
Таблица 2
Параметр Мощность двигателя Р2н, кВт
1,1 2,2 5,5 11 22 37 55 110 220
Пн 0,75 0,8 0,83 0,86 0,89 0,9 0,91 0,92 0,93
Рн 1,5 2,75 6,6 12,8 24,7 41 60,4 119,5 215
Ро / Р1Н 0,11 0,08 0,07 0,06 0,05 0,045 0,04 0,035 0,03
0,25
0,75 0,79 0,83 0,87 0,91 сояр1„
Рис. 2. Расчетный график т=/(со8 ф1н)
2. Метод на основе данных для номинального режима и их величин при частичных нагрузках на двигатели (безитерационная методика).
Заслуживает внимания безитерационная методика определения параметров схемы замещения АД на основе данных каталога для номинального режима (100%) и их величин при частичных нагрузках на двигатели (25 и 50%) [9]. В работе [9] приводится формула для расчета тока холостого хода со ссылкой на [12]:
I о =
I2 -11 р*
11н р-(1 – )/(1 – р )] 2
1 –
У(1 – )/(1 – р)]2
(7)
где 11н, 11р* – номинальный ток двигателя и ток при частичной нагрузке; р* – относительная величина загрузки двигателя по мощности; 5Н – номинальное скольжение.
Следует отметить, что данная формула дает по крайней мере меньшую погрешность [9]. В других работах также приводятся результаты использования расчетной формулы для тока холостого хода АД.
Номинальный ток трехфазного АД рассчитывается по известной в теории электрических машин формуле
I = 2н 1н З^нПн Фн .
(8)
Определенные сложности возникают при определении 11р* – тока при частичной загрузке двигателя по мощности. Её величина в общем виде может определяться по формуле
I = Г2Р* 1 р* 3^1„л р* соэ фр
(9)
где величины цр* и соБфР* – текущие значения КПД и коэффициент мощности, например, при частичной загрузке р* = 0,25 или других её значениях.
iНе можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
Примеры расчетов, проведенные по этой формуле, показали возможность её применения в случаях, когда известно значение тока двигателя 11р* в режиме частичной загрузки р*, например, при нагрузках 25, 50% или при другой произвольной загрузке. Однако границы произвольной нагрузки, дающие наиболее точные результаты в этой методике, не исследованы. По этой причине специально проведены расчеты, результаты которых для выбранных двигателей приведены в табл. 3.
Расчеты проводились с использованием данных табл. 4, где приведены в относительных единицах значения тока статора АД для относительных значений мощности двигателя при частичной загрузке.
Таблица 3
Результаты расчетов
Для двигателя 4А225М4У3 мощностью Р2н =55 кВт
р* 0,2 0,3 0,4 0,5 0,6
10, А 28,33 28,29 27,8 25,0 21,7
Для двигателя А4450У4ВУ3 мощностью Р2н =1000 кВт
р* 0,2 0,3 0,4 0,5 0,6
10, А 32.23 31,6 30,95 27,3 23,78
Таблица 4
Данные для определения частичной загрузки по мощности по значениям тока АД
II /!1н при СО8ф1н
0,92 0,89 0,86 0,83 0,79 0,76 0,73 0,69
0 0,2 0,25 0,32 0,37 0,44 0,48 0,54 0,58
0,1 0,24 0,29 0,34 0,39 0,45 0,49 0,55 0,59
0,2 0,3 0,34 0,38 0,43 0,47 0,52 0,57 0,62
0,3 0,35 0,4 0,43 0,47 0,51 0,55 0,59 0,65
0,4 0,43 0,47 0,5 0,53 0,56 0,59 0,64 0,69
0,5 0,5 0,54 0,57 0,59 0,62 0,64 0,68 0,72
0,6 0,59 0,62 0,64 0,66 0,68 0,70 0,74 0,77
0,7 0,69 0,7 0,72 0,74 0,75 0,77 0,79 0,82
0,8 0,77 0,79 0,81 0,82 0,83 0,85 0,86 0,88
0,9 0,87 0,88 0,89 0,9 0,91 0,92 0,93 0,94
1,0 1,0 1,0 1,0 1,0 1,0 1,0 1,0 1,0
Из полученных результатов следует, что наиболее близкими по своим значениям являются токи холостого хода при частичных нагрузках менее 0,4/>*. При значениях р*>0,5 происходит заметное снижение расчетных значений тока холостого хода, что позволило уточнить условия использования данного метода.
Для определения частичной загрузки двигателя по мощности можно воспользоваться специальными кривыми, приведенными на рис. 3.
При отсутствии кривых (см. рис. 3) можно воспользоваться данными табл. 4. Кроме этого, в каталогах [13] часто приводятся энергетические показатели при нагрузках АД, равных 25, 75, 50 и 125% от номинальной (рис. 4).
При этом для заданного коэффициента загрузки двигателя по мощности определяется фактическое значение мощности Р2р*, а с использованием кривых энергетических показателей определяют текущие значения КПД цр* и СОБфр*.
В дальнейшем по формуле (9) рассчитывается ток, потребляемый из сети при частичной загрузке, что позволяет на основе (7) найти величину тока холостого хода 10.
1-
0.8-
0.6-
0.4-
0.2-
0
1 2 3 4 5 6 7 8:
0,2 0,3 0,4 0,5 0.6 0.7 0.8 0.9 ЛУ/н Рис. 3. Кривые для определения частичной загрузки двигателя по мощности в зависимости от относительного значения тока статора АД при различных значениях со$ф„: 1- 0,92; 2 – 0,89; 3 – 0,86; 4 – 0,83; 5 – 0,79; 6 – 0,76; 7 – 0,73; 8 – 0,69
0,25
0,75-
11
Чн = 0,93 т|н = ‘0,85 Пн = 0,;77 Пн = 0,7
—
” : Пн = 0,63
0,25-
Рис. 4. Кривые энергетических показателей АД
3. Упрощенное выражение с учетом кратности пускового момента.
Номинальное значение намагничивающего тока [14] без учета потерь в стали и пренебрежении активным сопротивлением статора рассчитывается по формуле
1п »I
вш фн – сое фн
к +
‘
(10)
где км — кратность максимального момента.
В дальнейшем данное выражение можно представить в виде
(
10 – Лн
Фн “ТТ” СОв Фн
¿кр
л
(11)
4. Метод с использованием таблиц из справочников.
При отсутствии паспорта и данных каталога для расчета параметров могут быть использованы таблицы, кривые и коэффициенты [5, 15]. Так, например, средние значения величин /0 в долях от номинального тока для двигателей общего назначения [5] представляются в виде данных, приведенных в табл. 5.
В ряде случаев, особенно для контроля качества ремонтов, необходимо знать примерные средние и допустимые значения токов холостого хода. Ниже в табл. 6 они приведены в относительных единицах в зависимости от номинального коэффициента мощности.
Таблица 5
Средние значения тока холостого хода АД в долях от номинального тока
Р2н, кВт Синхронная скорость вращения иь об/мин
3000 1500 1000 750 600 500
0,1-0,5 0,55 0,7 0,8 0,9 0,95 –
0,51-1 0,4 0,55 0,6 0,65 0,85 0,9
1,1-5 0,35 0,5 0,55 0,6 0,65 0,7
5,1-10 0,25 0,45 0,5 0,55 0,6 0,65
10,1-25 0,2 0,4 0,45 0,5 0,55 0,6
25,1-50 0,18 0,35 0,4 0,45 0,5 0,55
50,1-100 – 0,3 0,33 0,35 0,4 0,45
>100 – 0,25 0,3 0,33 0,35 0,4
Таблица 6
Значения /ос//1н и /одОП//1н в зависимости от номинального коэффициента мощности со«ф„
СОвфн 0,69 0,73 0,76 0,79 0,83 0,86 0,89 0,92 0,95
Ьо/ /1Н 0,56 0,53 0,48 0,43 0,38 0,32 0,26 0,23 0,18
10доп/ /1Н 0,6 0,55 0,5 0,45 0,4 0,35 0,3 0,25 0,2
5. Метод с использованием полиномов 2-го порядка.
Для снижения погрешности при определении параметров схемы замещения в [16] предложено определять точное значение /0 с использованием полиномов второго порядка для различных групп мощностей АД
/0 = -1,161 • 10″8 Рн2 + 0,001194/ – 8,85
при 30 кВт < Рн < 45 кВт; 10 =-1,459 -10-8Рн2 + 0,002663/ – 80,70 при 55 кВт < Рн < 90 кВт;
0,000426Р – 3,37
т =-6,688 -1010 Р2
при 110 кВт < Рн < 315 кВт.
Данный метод разработан для ограниченного диапазона мощности – для двигателей средней мощности.
6. Метод на основе баланса реактивной мощности в номиналъномрежиме.
Уравнение баланса реактивной мощности АД можно представить выражением
Я = япфн = зтк + 312 (X + х0), (12)
или в общем виде
йн = Як + Я 0, (13)
где хк, XI и х0 – соответственно индуктивное сопротив-ление короткого замыкания АД, индуктивное сопротивление рассеяния обмотки статора и индуктивное сопротивление намагничивания.
Относительное значение индуктивного сопротивления короткого замыкания Хк примерно равно обратной величине от кратности пускового тока к,- = 1П / /н [11], т.е. можно записать Хк = 1 / к,-. При этом базовая величина сопротивления Яб = Ц^ф / /1нф.
Таким образом, индуктивное сопротивление короткого замыкания определится по выражению
1 и
нф
Мнф
iНе можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
(14)
а величина реактивнои мощности короткого замыкания
Я * 3/,2 х = 3/2 — • ^.
1н к 1нф 1
К, нф
После преобразований получено
Як = ^.
к
(15)
(16)
х
Выражение для тока холостого хода примет вид
ÄiJiH sinф1н -л1зиы1ы/к,
I о =
V3ulH
(17)
В итоге получим выражение для расчета тока холостого хода по паспортным данным двигателя:
(
I« L
sin Ф1Н
1
л
(18)
Данное выражение является наиболее простым из известных, например сравним с формулой (10).
Анализ результатов и выводы
Величины тока холостого хода ^ определенные различными рассмотренными методами, сведены в табл. 7.
Для сравнительной оценки результатов необходимо осуществить обоснованный выбор базового метода определения тока холостого хода, который является, по мнению многих специалистов, наиболее точным. Анализируя существующие публикации по данной тематике, можно отметить, что метод, основанный на использовании данных для номинального режима и их величин при частичных нагрузках на двигатели, нашел наиболее широкое применение. Весомым аргументом в пользу данного метода является его применение в учебном процессе [17]. Результаты, полученные по данному методу, предлагается принять в качестве базового для оценки точности других рассмотренных в данной работе методов.
Таблица 7
Значения тока холостого хода асинхронных двигателей из различных групп мощностей с использованием различных методов
Наименование метода Значение тока I0, А
55 кВт 1000 кВт
1. На основе энергетической диаграммы, паспортных данных и расчетного графика га-Дом ф1н) 28,5 34,2
2. На основе данных для номинального режима и их величин при частичных нагрузках на двигатели (прир* – 0,3) 228,3 331,6
3. Упрощенное выражение с учетом кратности пускового момента г Г ^ Фн – СО5 Фн 10 ~ “Чн 1 т „ К + -1 м м 222,0 226,1
4. С использованием таблиц (коэффициентов) из справочников: – по табл. 5 – по табл. 6. 330,1 226,1330,1 228,3 227,2330,1
5. С использованием полиномов 2-го порядка 221,7 –
6. На основе баланса реактивной мощности в номинальном режиме 229,4 331,7
Заключение
В результате определения тока холостого хода с использованием рассмотренных методов определения тока холостого хода для АД из разных групп мощности (средней мощности и мощных двигателей) и анализа результатов следует:
1. Метод определения тока холостого хода АД в номинальном режиме, основанный на использовании данных для номинального режима и их величин при частичных нагрузках на двигатели целесообразно принять в качестве базового, как наиболее точный, по экспертным оценкам специалистов.
2. Базовый метод определения тока холостого хода при использовании табличных данных для определения загрузки по мощности по значениям тока АД дает достаточно близкие своим значениям токи холостого хода при частичных нагрузках менее 0,4р*. Расчеты при значениях р*> 0,5 показали заметное снижение значений тока холостого хода. Таким образом, на основе проведенных расчетов уточнены условия использования данного метода.
3. Упрощенное выражение с учетом кратности пускового момента (п. 3 в табл. 7) дает наибольшую погрешность свыше 15%, что не позволяет использовать данный метод для расчета параметров схемы замещения АД.
4. Результаты, полученные с использованием таблиц (коэффициентов из справочников), дают достаточно близкие результаты для предварительного определения тока холостого хода, однако не во всех справочниках они приводятся.
5. Наиболее близкие к базовому методу получены значения тока холостого хода по методу на основе ба-ланса мощности для номинального режима. Получено наиболее простое выражение из известных, в котором из паспортных данных использованы амф1ни кратность пускового тока к,-. Погрешность для АД из группы средней мощности составила менее 4%, а для АД из группы мощных двигателей результаты практически совпали, что позволяет данный метод использовать в тех случаях когда, нет возможности воспользоваться базовым.
список литературы
1. Браславский И.Я., Ишматов З.Ш., Поляков В.Н. Энергосберегающий асинхронный электропривод / под ред. И.Я. Браславского. М.: Издательский центр «Академия», 2004. 256 с.
2. Головин В.В., Разворотнев В.П., Юдин А.Ю. Масштабное внедрение частотно-регулируемых электроприводов в ОАО «ММК» // Труды VII Международной (XIII Всероссийской) научно-технической конференции по автоматизированному электроприводу; ФГБОУ ВПО «Ивановский государственный энергетический университет имени В.И. Ленина». Иваново, 2012. С. 448-453.
3. Мугалимов Р.Г., Мугалимова А.Р. Энергосберегающие асинхронные двигатели с компенсацией реактивной мощности // Известия академии наук. Энергетика. 2013. №5. С. 30-45.
4. Venkataraman B., Godsey B., Premerlani W., Shulman E., Thakur M., Midence R. Fundamentals of a Motor Thermal Model and its Applications in Motor Protection // Conf. Record of 2005 Annual Pulp and Paper Industry Technical Conference. Jacksonville, FL, USA, 20-23 June, 2005, pp. 11-28. Doi: 10.1109/PAPC0N.2005.1502046.
5. Гейлер Л.Б. Справочник электрика промышленных предприятий. Минск: Беларусь, 1963. 588 с.
6. Лебедев Г.Г. Определение параметров асинхронного двигателя напряжением до 1000 В при отсутствии паспорта // Промышленная энергетика. 1981. №2. С. 15-16.
7. Литвак Л.В. Рациональная компенсация реактивных нагрузок на промышленных предприятиях. М.: Госэнер-гоиздат, 1963.
8. Электротехнический справочник. Т.3, кн.2 / гл. редактор И.Н. Орлов. 6 изд. М.: Энергоиздат, 1982, 560 с.
9. Мощинский Ю.А., Беспалов В.Я., Кирякин А.А. Определение параметров схемы замещения асинхронной машины по каталожным данным // Электричество. 1998. №4. С. 38-42.
10. Шеремет А.И., Шевченко Г.С. Определение параметров Т-образной схемы замещения асинхронного двигателя на основе опыта холостого хода // Научный Вестник ДГМА. 2017. №3. С. 104-108.
11. Донской Н.В. Определение параметров асинхронных двигателей по паспортным данным и пусковым характеристикам // Труды VII Международной (XIII Всероссий-
Information in English
ской) научно-технической конференции по автоматизированному электроприводу: ФГБОУ ВПО «Ивановский государственный энергетический университет имени
B.И. Ленина». Иваново, 2012. С. 196-201.
12. Регулируемые асинхронные двигатели в сельскохозяйственном производстве / под ред. Д.Н. Быстрицкого. М.: Энергия, 1975. 399 с.
13. Асинхронные двигатели серии 4А: справочник / А.Э. Кравчик и др. М.: Энергоатомиздат, 1982.
14. Сыромятников И.А. Режимы работы асинхронных и синхронных двигателей. М.: ГЭИ, 1969. 527 с.
15. Справочник по электрическим машинам / под общ. ред. И.П. Копылова и Б.К. Клокова. Т.1. М.: Энергоатомиздат, 1988. 456с.
16. Макеев М.С., Кувшинов A.A. Алгоритм расчета параметров схемы замещения асинхронного двигателя по каталожным данным //Вектор науки ТГУ. 2013. №1(23).
C. 108-112.
17. Качин С.И., Чернышев А.Ю., Качин О.С. Электрический привод: учеб.-метод. пособие. Томск: Изд-во Томского политехнического университета, 2009. 157 с.
Поступила в редакцию 24 июля 2020 г.
Calculation of Idling Current of an Asynchronous Motor
Gennady G. Lebedev
Engineer, LLC Chelyabinsk Tractor Plant – URALTRAC, Chelyabinsk, Russia. Anvar S. Sarvarov
D.Sc. (Engineering), Professor, Department of Automated Electrical Drive and Mechatronics, Nosov Magnitogorsk State Technical University, Magnitogorsk, Russia. E-mail: anvar@magtu.ru.
Maksim V. Vecherkin
Ph.D. (Engineering), Associate Professor, Department of Physics, Nosov Magnitogorsk State Technical University, Magnitogorsk, Russia. E-mail: vecherkin@inbox.ru. ORCID: https://orcid.org/0000-0002-8679-9831.
Mikhail Yu. Petushkov
D.Sc. (Engineering), Associate Professor, Professor of the Department of Electronics and Microelectronics Engineering, Nosov Magnitogorsk State Technical University, Magnitogorsk, Russia. E-mail: petushkov_m@mail.ru.
Valeriy I. Kosmatov
Ph.D. (Engineering), Professor, Department of Automated Electrical Drive and Mechatronics, Nosov Magnitogorsk State Technical University, Magnitogorsk, Russia.
Now in connection with a steady trend of application of asynchronous motors practically in all industries, there is frequently a necessity for calculation of parameters of the motor, which are not present in the reference data. Knowledge of the following asynchronous motor parameters in various operating modes is required: idling mode, nominal mode, arbitrary load mode, starting mode. Their calculation is based on substitution schemes, the accuracy of which depends largely on the accuracy of the calculation of current and no-load losses. In this article, a number of well-known theoretical and practical methods for calculating current and no-load losses of idling speed are considered. The substantiation of a possibility of no-load current calculation is carried out on the basis of reactive power balance of an asynchronous motor for nominal mode according to motor passport data. The rational expression for no-load current calculation is obtained. The considered methods of no-load current calculation and the data given in the reference literature are investigated with reference to two types of boosters from the power group up to 100 kW and power 1000 kW. Within the framework of the research, idle current calculations were carried
out on the basis of passport data of the considered motors and the evaluation of the obtained results was given. It is established that the expression for no-load current calculation obtained from the condition of reactive power balance in the nominal mode gives the closest values to the results of calculation using the basic method based on the data for the nominal mode and their values at partial loads on the engines.
Keywords: asynchronous motor, parameters, energy diagram, nominal mode, partial load, idle current, calculation methods, calculation graphs, energy curves, tabular data, reactive power balance, comparison of results.
References
1. Braslavskiy I.Ya., Ishmatov Z.Sh., Polyakov V.N. Energos-beregayushchiy asinkhronnyi elektroprivod [Energy saving asynchronous electric drive]. Under the editorship of I. Ya. Braslavskiy. Moscow, Academia, 2004. 256 p. (In Russian)
2. Golovin, V.V., Razvorotnev, V.P., YudinA.Yu. Large-scale introduction of the variable frequency electric drives in JSC “MMK”. Trudy VII Mezhdunarodnoy (XIII Vserossiyskoy)
nauchno-tekhnicheskoy konferentsii po avtomatizirovannomu elektroprivodu: FGBOU VPO «Ivanovsliy gosudarstvennyi energeticheskiy universitet imeni V.I. Lenina» [Proceedings of VII International (XIII All-Russia) Scientific and Technical Conference on the automated electric drive: FSBEI HPE “Ivanovo State Power Engineering University named after V.I. Lenin”], Ivanovo, 2012, pp. 448-453. (In Russian)
3. Mugalimov R.G., Mugalimova A.R. Energy saving induction motors with the reactive power compensation. Izvestia akade-mii nauk. Energetika [Proceedings of the Academy of sciences. Power engineering], 2013, no. 5, pp. 30-45. (In Russian)
4. Venkataraman B., Godsey B., Premerlani W., Shulman E., Thakur M., Midence R. Fundamentals of a Motor Thermal Model and its Applications in Motor Protection // Conf. Record of 2005 Annual Pulp and Paper Industry Technical Conference. Jacksonville, FL, USA, 20-23 June 2005. Pp. 11-28. Doi:10.1109/PAPC0N.2005.1502046.
5. Gailer L.B. Spravochnik elektrika promyshlennykh predpri-yatiy [Handbook of Industrial Enterprises Electricians], Minsk, Belarus, 1963, 588 p. (In Russian)
6. Lebedev G.G. Determination of asynchronous motor parameters with voltage up to 1000 V in the absence of passport. Promyshlennaya energetika [Industrial Power Engineering], 1981, pp.15-16. (In Russian)
7. Litvak L.V. Ratsionalnaya kompensatsiya reaktivnykh nagruzok na promyshlennykh predpriyatiyakh [Rational compensation of reactive loads at the industrial enterprises], Moscow, Gosenergoizdat, 1963. (In Russian)
8. Elektrotekhnicheskiy spravochnik [Electrical Engineering Handbook], vol. 3, book 2, Editor-in-Chief I.N. Orlov, 6 ed., Moscow, Energoizdat, 1982, 560 p. (In Russian)
9. MoshchinskiyYu.A., Bespalov V.Ya., Kiryakin A.A. Definition of parameters of the asynchronous machine replacement scheme by the catalogue data. Elektrichestvo [Electricity]. 1998. no. 4, pp. 38-42. (In Russian)
10. Sheremet A.I., Shevchenko G.S. Definition of parameters of the T-shaped scheme of asynchronous motor replacement on
Определение тока холостого хода асинхронного электродвигателя / Г.Г. Лебедев, A.C. Сарваров, М.В. Ве-черкин, М.Ю. Петушков, В. И. Косматов // Электротехнические системы и комплексы. 2020. № 3(48). С. 52-58. https://doi.org/10.18503/2311-8318-2020-3(48)-52-58
the basis of idling experience. Nauchnyi Vestnik DGMA [Scientific bulletin of DGMA], 2017, no. 23, pp. 104-108. (In Russian)
11. Donskoy N.V. Parameter determination of asynchronous motors on the basis of passport data and starting characteristics. Trudy VII Mezhdunarodnoy (XIII Vserossiyskoy) nauchno-tekhnicheskoy konferentsii po avtomatizirovannomy elektroprivodu: FGBOU VPO «Ivanovskiy gosudarstvennyi energeticheskiy universitet imeni V.I. Lenin» [Proceedings of VII International (XIII All-Russian) Scientific and Technical Conference on Automated Electric Drive: FSBEI HPE “Ivanovo State Power Engineering University named after V.I. Lenin”]. Ivanovo, 2012, pp. 196-201. (In Russian)
12. Reguliruemye asinkhronnye dvigateli v selskohozyistvennom proizvodstve [Adjustable asynchronous motors in agricultural production] / Under the editorship of D.N. Bystritskiy. Moscow: Energia, 1975, 399 p. (In Russian)
13. Asinkhronnye dvigateli serii 4A. Spravochnik [Asynchronous motors of the 4A series. Handbook] / A.E. Kravchik et al. -Moscow: Energoatomizdat, 1982. (In Russian)
14. Syromyatnikov I.A. Rezhimy raboty asinkhronnykh i sink-hronnykh dvigateley [Operation modes of the asynchronous and synchronous motors]. M.: GEI, 1969. 527 c. (In Russian)
15. Spravochnik po elektricheskim mashinam [Reference book of electric machines] under the general editorship of I.P. Kopylov and B.K. Klokov. Vol.1. Moscow: Ener-goatomizdat, 1988. 456 p. (In Russian)
16. Makeev M.S., Kuvshinov A.A. Algorithm of calculation of parameters of the asynchronous motor replacement scheme on the basis of the catalogue data. Vektor nauki TGU [Vector of Science of TSU], 2013, no. 1 (23), pp. 108-112. (In Russian)
iНе можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
17. Kachin S.I. Elektricheskiy privod: uchebno-metodicheskoe posobie [Electric drive: teaching and methodical manual]. S.I. Kachin, A.Yu. Chernyshev, O.S. Kachin; Tomsk Polytechnic University. Tomsk: Tomsk Polytechnic University Publisher, 2009. 157 p. (In Russian)
Lebedev G.G., Sarvarov A.S., Vecherkin M.V., Pe-tushkov M.Yu., Kosmatov V.I. Calculation of Idling Current of an Asynchronous Motor. Elektrotekhnicheskie sis-temy i kompleksy [Electrotechnical Systems and Complexes], 2020, no. 3(48), pp. 52-58. (In Russian). https://doi.org/10.18503/2311-8318-2020-3(48)-52-58
Содержание
- Как рассчитать ток холостого хода асинхронного двигателя
- Подписка на рассылку
- Параметры холостого хода электродвигателя
- Ток – холостой ход – асинхронный двигатель
- Как определить ток электродвигателя на практике.
- Расчет тока электродвигателя
- Как определить ток электродвигателя на практике.
- Определение мощности электродвигателя без бирки
- Определение мощности двигателя по диаметру вала и длине
- Проверить мощность по габаритам и крепежным размерам
Как рассчитать ток холостого хода асинхронного двигателя
Подписка на рассылку
Электродвигатель переходит в режим холостого хода, когда с его вала снимают рабочую нагрузку. В этом случае можно определить такие важные параметры функционирования устройства, как намагничивающий ток, мощность и коэффициент потерь в элементах конструкции привода. Но главное – в режиме холостого хода можно определить исправность устройства.
Так, электродвигатель на холостом ходу греться не должен. Но в некоторых случаях температура привода повышается – и это сигнализирует о неполадках, которые впоследствии могут проявить себя.
Параметры холостого хода электродвигателя
Как было сказано выше, холостой ход – это режим работы асинхронного электродвигателя, при котором на валу нет нагрузки. В этом случае устройство с точки зрения электротехники схоже с трансформатором. Но главное – оно потребляет меньше электроэнергии, что особенно важно для контроля правильности работы мотора.
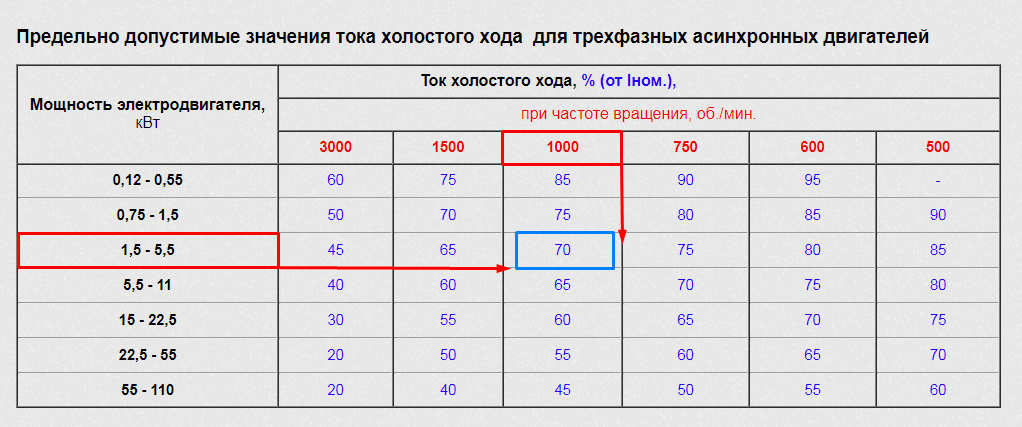
В частности, ток холостого хода асинхронного электродвигателя в зависимости от мощности и частоты вращения составляет в среднем 20-90% от номинального. Существует таблица, в которой указаны данные значения.
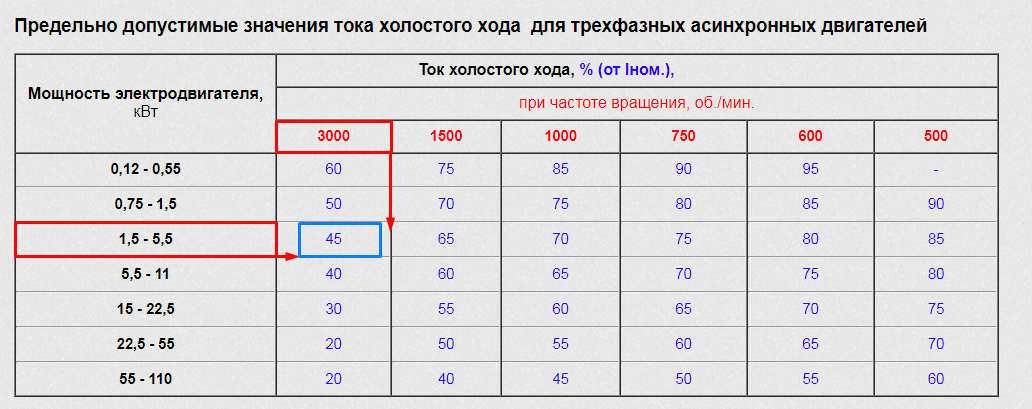
Так, например, ток холостого хода электродвигателя на 5 кВт при частоте вращения в 1000 оборотов в минуту составляет 70% от номинального (см. рис. 2). При частоте вращения 3000 оборотов в минуту – всего 45% от номинального (см. рис. 3). Это важно учесть, так как если фактическая сила тока значительно расходится с расчётной, то это сигнализирует о неполадках.
Стоит отметить, что параметры работы двигателя обычно указаны в прилагаемой к нему документации или могут быть получены посредством расчётов.
Что делать, если греется электродвигатель на холостом ходу
Электродвигатель на холостом ходу греться не должен. Допускается лишь незначительное увеличение температуры, обусловленное естественными причинами – появление трения в подшипниках на валу ротора и сопротивление в обмотке. А вот заметный нагрев сигнализирует в первую очередь о неполадках в устройстве.
Чаще всего нагревается асинхронный электродвигатель на холостом ходу из-за межвиткового замыкания в обмотках. Это требует срочного ремонта. Ведь при повышении нагрузок межвитковое замыкание может привести к перегреву и выгоранию обмотки – и, как следствие, повреждению как самого ЭД, так и конструкции, в которую он установлен.
Ещё одна возможная причина нагрева ЭД в этом режиме – эксплуатация в нештатных условиях. Например, превышение напряжения. В этом случае необходимо срочно отключить питание двигателя, так как из-за перегрева может возникнуть межвитковое замыкание в обмотках или замыкание обмотки на корпус двигателя.
Реже нагрев ЭД наблюдается из-за затруднённого движения ротора. Стоит убедиться, что подшипники работают нормально, а между обмотками ротора и статора не попали загрязнения.
Ток – холостой ход – асинхронный двигатель
Ток холостого хода асинхронных двигателей достигает 20 – 40 % от номинального тока статора ( / 0 0 2 – 0 4 / IH), между тем как у трансформаторов ток / 0 составляет всего 2 5 – 10 % от / IH. Повышенное значение тока холостого хода асинхронной машины обуслоь-лено наличием воздушного зазора между статором и ротором. [1]
Ток холостого хода асинхронных двигателей достигает 20 – 40 % от номинального тока статора ( / 0 2 – 0 4 / IH), между тем как у трансформаторов ток / 0 составляет всего 2 5 – 10 % от / IH. Повышенное значение тока холостого хода асинхронной машины обусловлено наличием воздушного зазора между статором и ротором. [2]
Почему ток холостого хода асинхронного двигателя составляет 25 – 50 %, а у трансформатора 3 – 10 % от номинального тока. [3]
Почему ток холостого хода асинхронного двигателя составляет 25 – 50 %, а трансформатора – 3 – 10 % от номинального тока. [4]
Для определения активной составляющей тока холостого хода асинхронного двигателя необходимо предварительно вычислить: вес активной стали статора и магнитные потери в нем-для трехфазного асинхронного двигателя; вес стали статора и ротора и потери в них – для однофазного двигателя с беличьей клеткой и малоинерционного асинхронного двигателя с немагнитным полым ротором. [5]
Для определения активной составляющей тока холостого хода асинхронного двигателя необходимо предварительно вычислить: массу активной стали статора и магнитные потери в нем – для трехфазного асинхронного двигателя; массу стали статора и ротора и потери в них – для однофазного двигателя с беличьей клеткой и малоинерционного асинхронного двигателя с немагнитным полым ротором. [6]
Из-за большого магнитного сопротивления цепи с двумя воздушными зазорами ток холостого хода асинхронного двигателя значителен и является в основном реактивным током. [7]
Сопротивления Rm и Хт намагничивающего контура значительно меньше соответствующих значений для схемы замещения трансформатора, так как ток холостого хода асинхронного двигателя гораздо больше, чем у трансформатора. Если при рассмотрении работы трансформатора часто можно пренебречь намагничивающим контуром, то при рассмотрении работы асинхронного двигателя этого сделать нельзя, так как ошибка может получиться значительной. [8]
При повышении частоты и номинальном напряжении ток холостого хода и магнитный поток уменьшаются, а следовательно, снижается и вращающий момент. На рисунке 249 приведен график зависимости тока холостого хода асинхронного двигателя от частоты, который показывает, что уменьшение частоты влечет за собой резкое увеличение тока холостого хода. [10]
Ток холостого хода двигателя и потребляемая им реактивная мощность значительно возрастают в случае работы от сети с напряжением выше номинального. Поэтому во время эксплуатации необходимо следить за напряжением цеховых сетей и не допускать отклонения его от номинального. Величина тока холостого хода асинхронного двигателя возрастает также вследствие низкого качества ремонтных работ: неправильное соединение секций обмоток, изменение при перемотке обмоточных данных по сравнению с паспортными и увеличение величины воздушного зазора. [11]
 Привет посетители сайта fazanet.ru, и в сегодняшней статье мы с вами разберём, как же сделать, этот непонятный расчёт тока электродвигателя. Каждый уважающий себя электромонтёр, робота которого связана с обслуживанием электрических, машин просто обязан это знать. Я в своё время тоже помню, что меня это очень сильно интересовало, когда меня перевили с одного цеха в другой. А конкретно именно работать электромонтёром.
Привет посетители сайта fazanet.ru, и в сегодняшней статье мы с вами разберём, как же сделать, этот непонятный расчёт тока электродвигателя. Каждый уважающий себя электромонтёр, робота которого связана с обслуживанием электрических, машин просто обязан это знать. Я в своё время тоже помню, что меня это очень сильно интересовало, когда меня перевили с одного цеха в другой. А конкретно именно работать электромонтёром.
Перед этим я уже немного затрагивал темы электродвигателей, когда писал о том как запустить асинхронные двигателей, и когда писал какие бывают номиналы электродвигателей.
Ну а теперь приступим конкретно к самому расчёту. Допустим: у вас есть трёхфазный асинхронный электродвигателей переменного тока, номинальная мощность, которого составляет 25 кВт, и вам хочется узнать какой же у него будет номинальный ток.
Для этого существует специальная формула: Iн = 1000Pн /√3•(ηн • Uн • cosφн),
Где Pн – это мощность электродвигателя; измеряется в кВт
Uн – это напряжение, при котором работает электродвигатель; В
ηн – это коэффициент полезного действия, обычно это значение 0.9
ну и cosφн – это коэффициент мощности двигателя, обычно 0.8.
Последние два значения обычно пишутся на заводской бирке, хотя они у всех двигателей практически одинаковые. Но все же нужно брать данные именно с заводской бирки на двигателе.

Вот как на этой картинке все значения видны, а ток нет. Только если КПД написан 81%, то для расчёта нужно брать 0.81.
Теперь подставим значения Iн = 1000•25/√3 • (0.9 • 380 • 0.8) = 52.81 А
Тем, кто не помнит, сколько будет √3, напоминаю – это будет 1,732
Вот и всё, все расчёты закончены. Всё очень легко и просто. По моему образцу вы можете легко рассчитать номинальный ток электродвигателя, вам всего лишь нужно подставить своих данных.
Как определить ток электродвигателя на практике.
Ещё в заключении, хотел поделиться с вами, тем как я определяю приблизительное значение тока без всяких расчётов. Если реально посмотреть, что у нас с вами получилось при расчёте, то реально вид, что номинальный ток приблизительно в два раза больше чем его мощность. Вот так я определяю ток на практике, мощность умножаю на два. Но это только приблизительное значение.
А ток холостого хода будет обычно в два раза меньше, чем его мощность. Но про то, как определить эти значения, мы поговорим с вами в следующих статьях. Так что подписывайтесь на обновления и не забываете поделиться этой статьёй со своими друзьями в социальных сетях.
Источник
Расчет тока электродвигателя
Привет посетители сайта fazanet.ru, и в сегодняшней статье мы с вами разберём, как же сделать, этот непонятный расчёт тока электродвигателя. Каждый уважающий себя электромонтёр, робота которого связана с обслуживанием электрических, машин просто обязан это знать. Я в своё время тоже помню, что меня это очень сильно интересовало, когда меня перевили с одного цеха в другой. А конкретно именно работать электромонтёром.
Перед этим я уже немного затрагивал темы электродвигателей, когда писал о том как запустить асинхронные двигателей, и когда писал какие бывают номиналы электродвигателей.
Ну а теперь приступим конкретно к самому расчёту. Допустим: у вас есть трёхфазный асинхронный электродвигателей переменного тока, номинальная мощность, которого составляет 25 кВт, и вам хочется узнать какой же у него будет номинальный ток.
Для этого существует специальная формула: Iн = 1000Pн /√3•(ηн • Uн • cosφн),
Где Pн – это мощность электродвигателя; измеряется в кВт
Uн – это напряжение, при котором работает электродвигатель; В
ηн – это коэффициент полезного действия, обычно это значение 0.9
ну и cosφн – это коэффициент мощности двигателя, обычно 0.8.
Последние два значения обычно пишутся на заводской бирке, хотя они у всех двигателей практически одинаковые. Но все же нужно брать данные именно с заводской бирки на двигателе.
Вот как на этой картинке все значения видны, а ток нет. Только если КПД написан 81%, то для расчёта нужно брать 0.81.
Теперь подставим значения Iн = 1000•25/√3 • (0.9 • 380 • 0.8) = 52.81 А
Тем, кто не помнит, сколько будет √3, напоминаю – это будет 1,732
Вот и всё, все расчёты закончены. Всё очень легко и просто. По моему образцу вы можете легко рассчитать номинальный ток электродвигателя, вам всего лишь нужно подставить своих данных.
Как определить ток электродвигателя на практике.
Ещё в заключении, хотел поделиться с вами, тем как я определяю приблизительное значение тока без всяких расчётов. Если реально посмотреть, что у нас с вами получилось при расчёте, то реально вид, что номинальный ток приблизительно в два раза больше чем его мощность. Вот так я определяю ток на практике, мощность умножаю на два. Но это только приблизительное значение.
А ток холостого хода будет обычно в два раза меньше, чем его мощность. Но про то, как определить эти значения, мы поговорим с вами в следующих статьях. Так что подписывайтесь на обновления и не забываете поделиться этой статьёй со своими друзьями в социальных сетях.
Источник
Определение мощности электродвигателя без бирки

При отсутствии техпаспорта или бирки на двигателе возникает вопрос: как узнать мощность электродвигателя без таблички или технической документации? Самые распространенные и быстрые способы, о которых мы расскажем в статье:
- По диаметру и длине вала
- По габаритам и крепежным размерам
- По сопротивлению обмоток
- По току холостого хода
- По току в клеммной коробке
- С помощью индукционного счетчика (для бытовых электродвигателей)
Определение мощности двигателя по диаметру вала и длине
Простейшие способы определения мощности и марки двигателя – габаритные размеры – вал или крепежные отверстия. В таблице указаны длины и диаметры валов (D1) и длина (L1) для каждой модели асинхронного промышленного трехфазного мотора. Перейти к подробным габаритным размерам электродвигателей АИР
| Р, кВт | 3000 об. мин | 1500 об. мин | 1000 об. мин | 750 об. мин | ||||
| D1, мм | L1, мм | D1, мм | L1, мм | >D1, мм | L1, мм | D1, мм | L1, мм | |
| 1,5 | 22 | 50 | 22 | 50 | 24 | 50 | 28 | 60 |
| 2,2 | 24 | 28 | 60 | 32 | 80 | |||
| 3 | 24 | 32 | 80 | |||||
| 4 | 28 | 60 | 28 | 60 | 38 | |||
| 5,5 | 32 | 80 | 38 | |||||
| 7,5 | 32 | 80 | 38 | 48 | 110 | |||
| 11 | 38 | 48 | 110 | |||||
| 15 | 42 | 110 | 48 | 110 | 55 | |||
| 18,5 | 55 | 60 | 140 | |||||
| 22 | 48 | 55 | 60 | >140 | ||||
| 30 | 65 | |||||||
| 37 | 55 | >60 | 140 | 65 | 75 | |||
| 45 | 75 | 75 | ||||||
| 55 | 65 | 80 | 170 | |||||
| 75 | 65 | 140 | 75 | 80 | 170 | |||
| 90 | 90 | |||||||
| 110 | 70 | 80 | 170 | 90 | ||||
| 132 | 100 | 210 | ||||||
| 160 | 75 | 90 | 100 | 210 | ||||
| 200 | ||||||||
| 250 | 85 | 170 | 100 | 210 | ||||
| 315 | — | — |
Проверить мощность по габаритам и крепежным размерам
Таблица подбора мощности двигателя по крепежным отверстиям на лапах (L10 и B10):
Источник
