
В этой статье описаны основные формулы, величины и их обозначения которые относятся ко всем двигателям постоянного тока.
В результате взаимодействия Iя тока якоря в проводнике L обмотки якоря с внешним магнитным полем возникает электромагнитная сила создающая электромагнитный момент М который приводит якорь во вращение с частотой n.
Противо ЭДС двигателя Eя
При вращении якоря пазовый проводник пресекает линии поля возбуждения с магнитной индукцией B и в соответствии с явлением электромагнитной индукции в проводнике наводится ЭДС Eя направленная навстречу Iя. Поэтому эта ЭДС называется противо ЭДС и она прямо пропорциональна Ф магнитному потоку и частоте вращения n.
Eя = Се * Ф * n (1)
Ce — постоянный коэффициент определяемой конструкцией двигателя.
Применив второй закон Кирхгофа получаем уравнение напряжения двигателя.
U = Eя + Iя * ∑R (2)
где ∑R — суммарное сопротивления обмотки якоря включающая сопротивление :
- обмотки якоря
- добавочных полюсов
- обмотки возбуждения (для двигателей с последовательным возбуждением)
Ток якоря Iя
Выразим из формулы 2 ток якоря.

Частота вращения якоря
Из формул 1 и 2 выведем формулу для частоты вращения якоря.

Электромагнитная мощность двигателя
Pэм = Ея Iя (5)
Электромагнитный момент

где: ω = 2*π*f — угловая скорость вращения якоря, Cм — постоянный коэффициент двигателя (включает в себя конструктивные особенности данного двигателя)

Момент на валу двигателя, т.е. полезный момент, где М0 момент холостого хода;
Р2 — полезная мощность двигателя
Министерство
образования и науки Российской федерации
Федеральное
агентство по образованию
Саратовский
государственный технический университет
Балаковский
институт, техники, технологии и управления
РАСЧЕТ ХАРАКТЕРИСТИК ДВИГАТЕЛЕЙ
ПОСТОЯННОГО ТОКА
Методические
указания к выполнению практической
работы
по
дисциплине «Электромеханические
системы» для студентов
специальности
210100 всех форм обучения
Одобрено
редакционно-издательским
советом
Балаковского
института техники,
технологии
и управления
Балаково 2009
Цель работы: Изучить способы расчета
механических характеристик двигателя
постоянного тока независимого и
последовательного возбуждения.
РАСЧЕТ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ДПТ
НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ
Расчет механических характеристик
электроприводов с ДПТНВ в основном
режиме. Механические характеристики –
зависимость частоты вращения n
или угловой скорости ω от электромагнитного
момента двигателя n=f(M)
или ω=f(M)
при неизменных значениях других
параметров, способных влиять на частоту
вращения и величину момента двигателя
(напряжение питания, величины тока и
так далее).

Рис.1. Схема двигателя
постоянного тока
Без учета индуктивности якорной цепи

Следует что
Электромагнитный момент
-
 ,
,
Тогда

где ω0 – скорость идеального
холостого хода;
Δω – изменение угловой скорости
относительно скорости холостого хода,
вызванное изменением нагрузки двигателя
(момента на его валу).
Все механические характеристики ДПТНВ
пересекаются в точках ω0.
Регулирование частоты вращения ДПТНВ
осуществляется:
– изменением сопротивления реостата
rдоб в цепи якоря
(только в сторону ее уменьшения от
номинальной)
– изменением магнитного потока возбуждения
с помощью реостата Ф в цепи обмотки
возбуждения (при двухзонном регулировании)
– изменением подводимого к цепи якоря
напряжения (только в низ от номинальной
частоты вращения, так как подавать на
двигатель напряжение выше номинального
недопустимо по условиям коммутации и
электрической прочности изоляции).
– импульсное регулирование (цепь якоря
периодически подключается к сети). Если
же хотя бы один из перечисленных
параметров двигателя изменен, то
механические характеристики называются
искусственными.
Для ДПТ – механические характеристики
прямолинейны и определяются двумя
точками:
Точка А – точка холостого хода ω = ω0,
M=0.
Точка Б – соответствующая номинальной
нагрузке двигателя с координатами MНОМ
и ωНОМ.
Для естественной характеристики точка
Б определяется из каталога
-
 ;
; .
.
Для точки А скорость холостого хода
-
 ;
; .
.
Для построения искусственной характеристики
точки Б рассчитывается число оборотов
-
 .
.

1 – естественная
характеристика при rдоб1=0
2; 3 – искусственные
характеристики при rдоб1>0
rдоб2>0,
и при rдоб3>rдоб4
Рис.2. Естественная
и искусственные механические характеристики
При расчете механических характеристик
обычно решают одну из двух задач:
-
По заданным координатам точки на
искусственной механической характеристики
при номинальной нагрузке с координатами
MНОМ и nНОМ
определяют сопротивление резистора
M, в соответствующее этой
искусственной характеристики. -
По заданным значениям сопротивления
резистора M и тока якоря
IЯНОМ, соответствующего
номинальной нагрузке двигателя,
определяют частоту вращения якоря
двигателя и строят искусственную
механическую характеристику.
Задача 1: ДПТНВ имеет номинальные
данные:
– мощность РНОМ=42кВт;
– напряжение UНОМ=440В;
– частота вращения nНОМ=3000об/мин;
– сопротивление обмоток цепи якоря
RЯ=0,17Ом;
– КПД ηНОМ=90,5%.
Требуется определить сопротивление
резистора rдоб,
который следует включить последовательно
в цепь якоря, чтобы при номинальном
моменте нагрузки MНОМ
частота вращения была n’НОМ=0,5
nНОМ об/мин.
Решение:
-
Ток якоря в номинальном режиме:

-
Пограничная частота вращения:

-
Номинальный момент на валу двигателя:

-
Координаты точки номинального режима
на естественной механической
характеристики: ;
; .
. -
Номинальное сопротивление двигателя:

-
Сопротивление резистора M,
соответствует искусственной механической
характеристике с координатой частоты
вращения:

-
Механические характеристики ЭП с
рассматриваемым двигателем на рис.3:


Рис.3. Естественная
и искусственная механические характеристики
Н а
а
рис.3 цифрой 1 обозначена естественная
характеристика, а цифрой 2 искусственная
характеристика. В режиме искусственной
механической характеристики вводится
понятие номинального сопротивления,
представляющего собой сопротивление
RНОМ, каким должна
обладать цепь якоря двигателя, чтобы
при подведенном к неподвижному якорю
напряжении UНОМ ток
в цепи якоря был бы номинальным IЯНОМ:
Задача 2: Рассчитать координаты
необходимые для построения естественной
и искусственной механической характеристики
ДПТНВ типа ПБС-62, если внешнее сопротивление
в цепи якоря rдоб=2,4Ом.
Номинальные данные двигателя:
– мощность РНОМ=4,7кВт;
– напряжение UНОМ=220В;
– частота вращения nНОМ=1000
об/мин;
– КПД ηНОМ=87%.
Решение:
-
Номинальный ток якоря:
-
Номинальное сопротивление двигателя:

-
Сопротивление обмоток в цепи якоря:

-
Пограничная частота вращения:

-
Номинальный момент:

-
Частота вращения в режиме искусственной
механической характеристики при
номинальном моменте нагрузки:
7) По координатам n0=1069об/мин,
nНОМ=1000 об/мин и
MНОМ=44,9Н·м строят
естественную механическую характеристику;
а по координатам n0=1069об/мин,
n’НОМ=714 об/мин и
MНОМ=44,9Н·м, строят
искусственную механическую характеристику.
РАСЧЕТ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ДПТ
ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ
На рис.4 представлена схема включения
ДПТ последовательного возбуждения.

Рис.4. Схема ДПТ
последовательного возбуждения
Отличительный признак – ток нагрузки
двигателя (ток якоря) является током
возбуждения IЯ=IB=I,
поэтому магнитный поток Ф зависит от
нагрузки:
-
 ,
,
где С – коэффициент пропорциональности.
При том вращающий момент
-
 ,
,
то есть пропорционален квадрату тока,
тогда ток
-
 .
.
Число оборотов:
-
 ,
,
следовательно механическая характеристика
ДПТ криволинейна.
Особенности характеристики:
-
Механическая характеристика не
пересекает ось координат, так как при
отсутствии нагрузки двигателя частота
вращения возрастает неограниченно. По
той причине не допускается работа ДПТПВ
при нагрузке M≤0?25MНОМ. -
При малых нагрузках частота вращения
значительна (характеристика мягкая).
При нагрузках близких к номинальной,
характеристика становится более жесткой
(пологой). Объясняется это тем, что при
токе нагрузки IЯ≥0,8IЯНОМ
магнитная система насыщается и магнитный
поток возбуждения остается практически
неизменным.
Для построения естественной механической
характеристики n=f(M)
ДПТПВ по универсальным характеристикам
поступают следующим образом:
1) Определяют фактические номинальные
значения тока IЯ(A),
момента M(Н·м) и частоты
вращения n об/мин.
2) Задаются рядом относительных значений
тока нагрузки и по универсальной
характеристики определяют относительные
значения момента М* и частоты n*
3) Сроят естественную механическую
характеристику, пересчитав через
номинальное и относительное значения
требуемых параметров с целью определения
текущих.
Задача 3: Построить естественную
механическую характеристику для ДПТПВ
с техническими данными:
– IЯНОМ=19A;
– PНОМ=3кВт;
– UНОМ=220B;
– nНОМ=1130 об/мин.
Решение:
-
Номинальное значение момента
2) По полученным данным строим естественную
механическую характеристику (график
проходящий через точку А1)
При расчете искусственных характеристик
решают так же одну из двух задач:
-
Либо по заданным координатам точки на
искусственной механической характеристики
определяют сопротивление резистора
rдоб, необходимое
для получения требуемой искомой
характеристики. -
Либо по заданным сопротивлениям rдоб
определяют координаты точек искусственной
характеристики.
3) Задаемся относительными значениями
тока нагрузки и по универсальным
естественным характеристикам определяем
величины, необходимые для построения
естественной характеристики двигателя
сначала в относительных единицах, затем
в именованных.

Рис.5. универсальная
естественная характеристика

Рис.6. График
естественной и искусственных механических
характеристик
Задача 4: Для двигателя последовательного
возбуждения (см задача выше) определить
сопротивление резистора rдоб,
при включении которого в цепь якоря
искусственная механическая характеристика
пройдет через т А2 с координатами:
MНОМ=25,35Н·м, nНОМ=750
об/мин.
Решение:
-
Номинальное сопротивление двигателя:

-
КПД в номинальном режиме:

-
Сопротивление обмоток в цепи якоря:

-
Сопротивление резистора rдоб
ВАРИАНТЫ ЗАДАНИЙ
Для всех задач использовать формулировку
как в приведенных примерах. Технические
характеристики двигателей выбрать из
таблицы согласно вариантам.
Таблица 1 –
Технические характеристики двигателей
|
№ |
РН, |
Uн, |
КПД, |
nH, |
RЯЦ, |
|
1 |
2 |
3 |
4 |
5 |
6 |
|
1 |
4 |
220 |
72.3 |
900 |
4.06 |
|
2 |
3.45 |
220 |
69.3 |
750 |
5.96 |
|
3 |
2 |
220 |
57.6 |
450 |
9.33 |
|
4 |
4.25 |
220 |
68 |
730 |
4.57 |
|
5 |
3 |
220 |
60.3 |
475 |
7.24 |
|
1 |
2 |
3 |
4 |
5 |
6 |
|
6 |
3.55 |
220 |
60.1 |
425 |
6.62 |
|
7 |
15 |
220 |
77.9 |
1400 |
0.278 |
|
8 |
7.5 |
220 |
76 |
1000 |
1.93 |
|
9 |
6 |
220 |
74 |
875 |
3.09 |
|
10 |
4.25 |
220 |
65 |
580 |
4.79 |
|
11 |
11 |
220 |
78.5 |
1060 |
1.23 |
|
12 |
8.5 |
220 |
76 |
875 |
2.08 |
|
13 |
8 |
220 |
68 |
600 |
2.93 |
|
14 |
11 |
220 |
76 |
800 |
1.77 |
|
15 |
8.5 |
220 |
68 |
515 |
2.76 |
|
16 |
15 |
220 |
80.7 |
850 |
1.31 |
|
17 |
11 |
220 |
70.5 |
530 |
2.23 |
|
18 |
15 |
220 |
75.3 |
580 |
1.65 |
|
19 |
17 |
220 |
73 |
500 |
1.53 |
|
20 |
20 |
220 |
75 |
475 |
1.36 |
ВРЕМЯ, ОТВЕДЕННОЕ НА ВЫПОЛНЕНИЕ РАБОТЫ
1. Подготовка к работе – 1,0 акад.час
2. Выполнение работы – 2,0 акад.часа
3. Оформление работы – 1,0 акад.час
ЛИТЕРАТУРА
-
Кацман М.М. Электрический привод: Учебник
для студ. образоват. учреждений сред.
проф. образования. – М.: Издательский
центр «Академия», 2005. – 384с. ISBN
5-7695-2060-4 -
Практикум по электротехнике и электронике.
Учебное пособие для вузов / Кононенко
В.В., Мишкович В.И., Муханов В.В., Планидин
В.Ф., Чеголин П.М. / Под ред. В.В.Кононеко.
– Ростов н/Д. Феникс, 2007. – 384с.
СОДЕРЖАНИЕ
Введение 2
Расчет механических характеристик ДПТ
независимого возбуждения 2
Расчет механических характеристик ДПТ
последовательного
возбуждения 8
Варианты заданий 12
Время, отведенное на выполнение
работы 13
Литература 13
РАСЧЕТ ХАРАКТЕРИСТИК ДВИГАТЕЛЕЙ
ПОСТОЯННОГО ТОКА
Методические
указания к выполнению практической
работы по
дисциплине
«Электромеханические системы» для
студентов
специальности
210100 всех форм обучения
Составили:
Мефедова Юлия Александровна
Рецензент
Т.Н. Скоробогатова
Редактор Л.В.Максимова
Корректор А.М.Рогачева
|
Подписано |
Формат 60х84 |
|
|
Бумага |
Усл. печ. л. |
Уч.-изд.л. |
|
Тираж 100 |
Заказ |
Бесплатно |
Саратовский государственный технический
университет
410054, г.Саратов, ул.Политехническая, 77
Копипринтер БИТТиУ, 413840, г.Балаково, ул.
Чапаева, 140



16
Расчетные формулы параметров машин постоянного тока
В таблице 1 представлены расчетные формулы для определения основных параметров машин постоянного тока.
В данной таблице собраны все формулы, которые касаются расчета параметров машин постоянного тока.
Таблица 1 — Расчетные формулы для определения основных параметров машин постоянного тока
| Наименование величин | Формулы | Принятые обозначения |
|---|---|---|
| Мощность, кВт |
|
I – ток машины, А; U – внешнее напряжение, В; |
| Ток генератора и двигателя, А |
|
Iа – ток якоря; Iв – ток параллельной обмотки возбуждения, А; |
| Внешнее напряжение, В |
|
∑Ra – сумма сопротивлений якорной цепи, Ом; Е – ЭДС машины, В; |
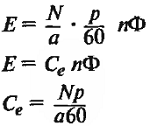
| ЭДС, В |
|
N – число проводников обмотки якоря; а – число пар параллельных ветвей в обмотке якоря; р – число пар полюсов; n – скорость вращения, об/мин. |
| Сопротивление якорной цепи, Ом |
|
Ф – магнитный поток пары полюсов, вебер; Rя, Rс, Rдоб. – сопротивления обмотки якоря, последовательной обмотки возбуждения и добавочных полюсов, Ом |
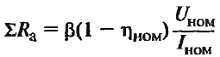
| Ориентировочной значение сопротивления цепи якоря, Ом |
|
Значение коэффициента β двигателей различного типа возбуждения: для независимого и параллельного возбуждения β=0,5; для смешанного β=0,6; для последовательного β=0,75; |
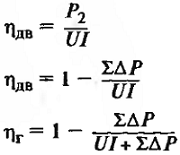
| КПД двигателя и генератора |
|
∑∆Р – суммарные потери в машине, кВт; |
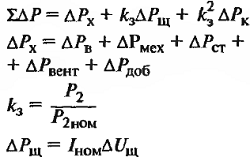
| Суммарные потери, кВт |
|
∆Рх – потери холостого хода машины или постоянные потер, кВт; ∆Рв – потери на возбуждение, кВт; ∆Рмех. – механические потери на трение в подшипниках и о коллектор, кВт; ∆Рст. – магнитные потери в стали якоря, кВт; ∆Рвент. – вентиляционные потери, кВт; ∆Рдоб. – добавочные потери. В некомпенсированных машинах ∆Рдоб. = 1%Рном, в компенсированных 0,5%, кВт; kз – коэффициент загрузки; ∆Uщ = 2 В для графитных щеток; ∆Uщ = 0,6 В для металлографитных; |
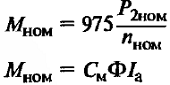
| Переменные потери |
|
|
| Номинальный вращающий момент, кГм |
|
См – конструктивная постоянная момента; Ф – магнитный поток, вебер; |
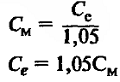
| Расчетные коэффициенты для двигателя параллельного возбуждения |
|
|
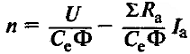
| Скоростная характеристика двигателя |
|
|
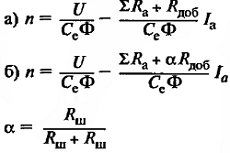
| Искусственные скоростные характеристики |
|
а) искусственная скоростная характеристика при введении добавочного сопротивления Rдоб. последовательно в цепь якоря; б) искусственная скоростная характеристика двигателя при шунтировании якоря двигателя сопротивлением Rш; α – коэффициент шунтирования. |



Литература:
1. Справочная книга электрика. В.И. Григорьева, 2004 г.
Всего наилучшего! До новых встреч на сайте Raschet.info.
КПД генератора, параметры машин постоянного тока, ток генератора, ЭДС
Благодарность:
Если вы нашли ответ на свой вопрос и у вас есть желание отблагодарить автора статьи за его труд, можете воспользоваться платформой для перевода средств «WebMoney Funding» и «PayPal».
Данный проект поддерживается и развивается исключительно на средства от добровольных пожертвований.
Проявив лояльность к сайту, Вы можете перечислить любую сумму денег, тем самым вы поможете улучшить данный сайт, повысить регулярность появления новых интересных статей и оплатить регулярные расходы, такие как: оплата хостинга, доменного имени, SSL-сертификата, зарплата нашим авторам.
Недавние калькуляторы
Что уникального в наших калькуляторах?
- Расчет с разными единицами измерения для каждой переменной: теперь вы можете рассчитать объем сферы с радиусом в дюймах и высотой в сантиметрах и рассчитывать рассчитанный объем в кубических метрах.
- Поддерживает огромный набор измерений и единиц измерения: мы поддерживаем 100 измерений, таких как длина, вес, площадь, ускорение, давление, скорость, время и т. Д., И тысячи единиц измерения.
- Широчайший охват калькуляторов и рост: в настоящее время мы поддерживаем огромное количество калькуляторов и добавляем еще больше. Нужен новый калькулятор? Просто дайте нам знать, и мы доставим его вам как можно скорее.
- Изучите другие способы вычисления одного и того же результата: может быть несколько способов получить результат. В нашей общей структуре калькулятора они перечислены для вас. Например, площадь круга может быть измерена его радиусом, диаметром, периметром, площадью сектора и т. Д.
- ERROR:WebsiteFeatures5Plese use a COLON(‘:’) in between the feature name.
