В этой статье мы узнаем, как найти угловое ускорение колеса, и решим некоторые задачи, связанные с угловым ускорением колеса.
Угловое ускорение представляет собой изменение угловой скорости, вызванное изменением углового движения колеса при воздействии крутящего момента, эквивалентного моменту инерции колеса, и силы, приложенной к колесу по касательной.
Угловое ускорение колеса от угловой скорости
Угловое ускорение — это просто отношение изменения угловой скорости колеса при вращении ко времени. Это дается уравнением, как показано ниже: –
а = ш2 – ω1 / т2-t1
Где α угловое ускорение,
ω1 и ω2 являются окончательными и начальными угловые скорости соответственно и
t1 и т2 являются конечным и начальным временем, в течение которого произошло изменение.
Подробнее о Как найти угловое ускорение из угловой скорости: задача и примеры.
Пример 1: Рассчитайте угловое ускорение колеса автомобиля в движении, зная, что угловая скорость автомобиля 30 рад/с, которая увеличивается до 80 рад/с за 40 секунд.
Решение: Имеем, ω2 =80рад/с
ω1=30рад/с
Т=40сек
Следовательно,
а = ш2 – ω1 / т2-t1
α = 80 – 30/ 40 = 1.25 рад/с2
Угловое ускорение колеса автомобиля равно 1.25 рад/с.2.
Связь между угловым ускорением и тангенциальным ускорением
Мы знаем, что тангенциальная скорость тела в угловое движение связано с угловой скоростью следующим уравнением
v = ωr — (2)
Тангенциальное ускорение объекта — это изменение тангенциальной скорости по отношению к изменяющемуся времени.
а = дв/дт
Подставляя уравнение (2) здесь
а=r dω/dt
Следовательно,
а=ра — (3)
Где α – угловое ускорение.
а = а/г — (4)
Угловое ускорение колеса прямо пропорционально тангенциальному ускорению колеса и обратно пропорционально радиусу колеса. Если радиус колеса увеличивается, то изменения, наблюдаемые в θ, будут сведены к минимуму.
Подробнее о Как найти тангенциальное ускорение: задачи и примеры.
Пример 2. Объект, движущийся по круговой траектории радиусом 12 м, ускоряется со скоростью 4 м/с.2. Вычислите угловое ускорение тела.
Данный: а = 4 м / с2,
r = 12 м
У нас есть,
α=a/r=4/12 =0.33 рад/с
Угловое ускорение объекта равно 0.33 рад/с.
Ускорение из-за крутящего момента
К колесу нужно приложить силу, чтобы привести его в движение. Приложенная сила должна быть касательной к колесу, чтобы привести колесо в поступательное движение.
Крутящий момент на колесе определяется приложенной силой и длиной смещения колеса под действием силы. Крутящий момент на колесе зависит от того, сколько составляет масса колеса. Чем больше масса, тем больше силы потребуется, и, следовательно, создаваемый крутящий момент будет иметь большую величину.
Опыт крутящего момента на колесе определяется выражением
𝜏 =F* смещение
𝜏 =Ма* Р
Подставляя уравнение (3) в приведенное выше уравнение, мы получаем
𝜏 = МР2α
Стремление тела сопротивляться угловому ускорению, обусловленному его массой, называется моментом инерции и является произведением всей массы тела на квадрат его расстояния от оси вращения.
я=МР2
Следовательно,
𝜏 =I α —(5)
Следовательно,
α = 𝜏/I — (6)
Угловое ускорение представляет собой отношение крутящего момента, действующего на тело, к его моменту инерции.
Подробнее о Как найти натяжение к крутящему моменту.
Как рассчитать момент инерции колеса?
Чем меньше момент инерции, тем меньше будет крутящий момент на корпусе.
Предположим, что колесо имеет массу «M», а радиус колеса равен «R», тогда момент инерции колеса равен общему моменту инерции обода и всех спиц.
На приведенной ниже диаграмме есть 8 спиц колеса, и масса каждой спицы составляет одну треть массы колеса.

я=яобод+Iговорил
=МР2+8 ( 1/3 МР2 )
Длина спицы равна радиусу колеса, следовательно,
=МР2+8 (1/3 МР2)
=1+1/3 МР2
=11/3 МР2 -(Один)
Следовательно, теперь у нас есть момент инерции колеса.
Подставляя уравнение (7) в уравнение (5), угловое ускорение колеса
α = 3𝜏/11 МР2
Пример 3. Рассмотрим колесо радиусом 20 см и массой 2 кг. К колесу приложена сила 20 Н, и оно проехало расстояние 20 м. Затем рассчитайте угловое ускорение колеса.
Данный: р=20см,
м=2кг,
х=20м,
F = 20N
Крутящий момент на колесе
𝜏 =F*x=20Н* 20м=400Нм
Следовательно, угловое ускорение колеса равно
α=3𝜏/ 11MR2
=3*400N/11*2kg*(0.2m)2
=1.36рад/с2
Компания угловое ускорение колеса 1.36 рад/с2.
Подробнее о Угловое ускорение.
Часто задаваемые вопросы
Q1. Рассмотрим гигантское колесо массой 5 кг и радиусом 120 см, вращающееся со скоростью 2 оборота в секунду, которое ускоряется и достигает угловой скорости 5 об/мин за 25 секунд. Рассчитайте тангенциальное ускорение колеса и крутящий момент, возникающий по касательной к колесу.
Данный: М=5кг, г=120см=1.2м
ωi=2rpm=2*2π/60=π/15rad/s
ωf=5 об/мин=5 * 2π * 60 = π/6 рад/с
т=25 секунд
Угловое ускорение колеса равно
а = шf– ωi / т2-t1
=π/6-π/15*25=π/ 250 рад/с2
Тангенциальное ускорение колеса равно
а=ра
=1.2 м*π/250 рад/с2= 0.015 м / с2
Момент инерции колеса равен
I=11/3 МР2
=11/3 * 5* (1.2)2=26.4 кг.м2
Следовательно, крутящий момент на колесе равен
α = 𝜏 / я
𝜏 =α я
π рад/с2*26.4 кгм2=0.33 Нм
Q2. Если на колесе 12 спиц, то вычислить момент инерции колеса.
Момент инерции от спиц будет
Iговорил=12 ( 1/3 МР2)=4МР2
Момент инерции обода равен
Iобод=МР2
Следовательно, момент инерции колеса равен
я = яобод + Яговорил=4МР2+ МР2=5МР2
Кратко опишите движение колеса.
Колесо совершает вращательное и поступательное движение. Он будет показывать только вращательное движение при соединении с осью.
Один оборот колеса равен углу 4π. При поступательном движении длина, проходимая колесом за один оборот при вращении, равна длине окружности колеса.
Если радиус колеса увеличить в 10 раз, то как изменится тангенциальное и угловое ускорение колеса?
Компания угловое ускорение и тангенциальное ускорение связаны радиусу колеса уравнением a=rα
Если радиус колеса увеличить в 10 раз, то тангенциальное ускорение увеличится в 10 раз, а угловое ускорение останется неизменным, но крутящий момент требуемый для смещения угол θ будет больше.
Рассмотрим понятия угловой скорости и углового ускорения при вращении твердого тела в теории и на примерах решения задач.
Угловая скорость
Угловой скоростью называют скорость вращения тела, определяющуюся приращением угла поворота тела за некоторый промежуток (единицу) времени.
Обозначение угловой скорости: ω (омега).
Рассмотрим некоторое твердое тело, вращающееся относительно неподвижной оси.
С этим телом свяжем воображаемую плоскость П, которая совершает вращение вместе с заданным телом.
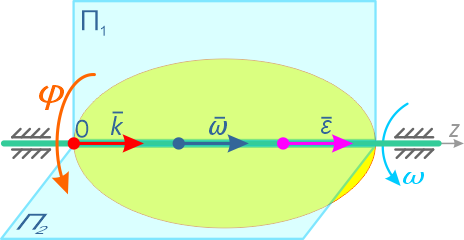
Вращательное движение определяется двугранным углом φ между двумя плоскостями, проходящими через ось вращения. Изменение этого угла с течением времени есть закон вращательного движения:
Положительным считается угол, откладываемый против хода часовой стрелки, если смотреть навстречу выбранному направлению оси вращения Oz. Угол измеряется в радианах.
Быстрота изменения угла φ (перемещения плоскости П из положения П1 в положение П2) – это и есть угловая скорость:
Приняв вектор k как единичный орт положительного направления оси, получим:
Вектор угловой скорости – скользящий вектор: он может быть приложен к любой точке оси вращения и всегда направлен вдоль оси, при положительном значении угловой скорости направления ω и k совпадают, при отрицательном – противоположны.
Формулы угловой скорости
Формула для расчета угловой скорости в зависимости от заданных параметров вращения может иметь вид:
- если известно количество оборотов n за единицу времени t:

- если задан угол поворота φ за единицу времени:
- если известна окружная скорость точки тела v и расстояние от оси вращения до этой точки r:


Размерности угловой скорости:
- Количество оборотов за единицу времени [об/мин], [c-1].
- Угол поворота за единицу времени [рад/с].
Определение угловой скорости
Пример: Диск вращается относительно своего центра.
Известна скорость v некоторой точки A, расположенной на расстоянии r от центра вращения диска.
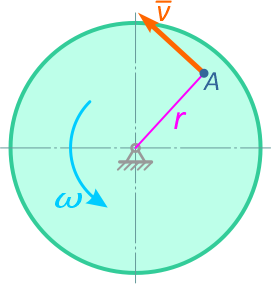
Определить величину и направление угловой скорости диска ω, если v = 5 м/с, r = 70 см.
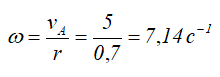
Таким образом, угловая скорость диска составляет 7,14 оборотов в секунду. Направление угловой скорости можно определить по направлению скоростей её точек.
Вектор скорости точки A стремится повернуть диск относительно центра вращения против хода часовой стрелки, следовательно, направление угловой скорости вращения диска имеет такое же направление.
Другие примеры решения задач >
Угловое ускорение
Угловое ускорение характеризует величину изменения угловой скорости при вращении твердого тела:
Обозначение: ε (Эпсилон)
Единицы измерения углового ускорения: [рад/с2], [с-2]
Вектор углового ускорения так же направлен по оси вращения. При ускоренном вращении их направления совпадают, при замедленном — противоположны.
Другими словами, при положительном ускорении угловая скорость нарастает (вращение ускоряется), а при отрицательном — уменьшается (вращение замедляется).
Для некоторых частных случаев вращательного движения твердого тела могут быть использованы формулы:
Расчет углового ускорения
Пример: По заданному значению касательной составляющей полного ускорения aτ точки B, расположенной на расстоянии r от центра вращения колеса.
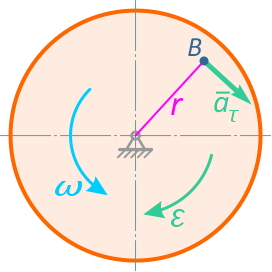
Требуется определить величину и направление углового ускорения колеса ε, если aτ = 10 м/с2, r = 50 см.
Угловое ускорение колеса в заданный момент времени составляет 20 оборотов за секунду в квадрате. Направление углового ускорения определяется по направлению тангенциального ускорения точки.
Здесь, угловое ускорение направлено противоположно направлению угловой скорости вращения колеса. Это означает, что вращение колеса замедляется.
В технике угловая скорость часто задается в оборотах в минуту n [об/мин]. Один оборот – это 2π радиан:
Например, тело совершающее 1,5 оборота за одну секунду имеет угловую скорость
ω = 1,5 с-1 = 9,42 рад/с.
Смотрите также:
- Примеры расчета угловой скорости и ускорения
- Скорости и ускорения точек вращающегося тела
![]()
Загрузить PDF
![]()
Загрузить PDF
Угловое ускорение, обозначаемое α, характеризует быстроту изменения угловой скорости тела. Чтобы вычислить угловое ускорение, вы должны знать определения угла поворота и угловой скорости. Угол поворота, обозначаемый Θ, характеризует вращение тела вокруг центра вращения; угловая скорость, обозначаемая ω, характеризует скорость вращения тела вокруг центра вращения.
Шаги
-

1
Проверьте вращающееся тело. Перед любыми расчетами убедитесь, что рассматриваемое тело движется по идеальной окружности вокруг центра вращения (или оси вращения).
- Для понимания этой концепции представьте камень, привязанный к концу веревки. Теперь возьмите другой конец веревки и покрутите камень. Линия, проходящая через вашу руку, является осью вращения; камень, привязанный к веревке, является вращающимся телом.
-
2
Угол поворота. Угол поворота тела (обозначается как Θ), вращающегося вокруг неподвижной оси, может быть положительным или отрицательным. Углы, измеренные в направлении против часовой стрелки, считаются положительными; углы, измеренные в направлении по часовой стрелке, считаются отрицательными.
- Угловая скорость по величине равна углу поворота (вокруг точки или оси) в единицу времени.
-
3
Определите угол поворота. Для вычисления угловой скорости тела вы должны знать угол поворота.
- Например, в результате эксперимента вы выяснили, что угол поворота вращающегося тела в определенный момент времени t находится по формуле: Θ = 2t3.
-
4
Вычислите угловую скорость. Мгновенная угловая скорость вращающегося тела равна производной от угла поворота (Θ) по времени (t); в этом случае производная – это быстрота изменения угла поворота за бесконечно малый промежуток времени. Другими словами: ω = dΘ/dt.
- В приведенном выше примере расчеты угловой скорости выглядят следующим образом:
-
5
Вычислите угловое ускорение. Напомним, что угловое ускорение – это быстрота изменения угловой скорости. Таким образом, угловое ускорение равно производной от угловой скорости.
- В приведенном выше примере расчеты углового ускорения выглядят следующим образом:
Реклама





Советы
- Производная от какой-либо величины – это быстрота изменения этой величины за промежуток времени t1 и t2, причем t2 – t1 -> 0, то есть за бесконечно малый промежуток времени.
- Производная от tn по t (где n – любое целое число) вычисляется следующим образом:
- Формула для вычисления угла поворота в определенный момент времени t находится экспериментально (в результате множества измерений).
- Запомните: 1 рад = 57,3 градусов.

Реклама
Об этой статье
Эту страницу просматривали 26 063 раза.
Была ли эта статья полезной?
Содержание
- Физика автомобиля для игр.
- Введение
- Формула для вычисления углового ускорения
- Угловое ускорение – что это?
- Угловая скорость
- Основные формулы для вычисления угловой скорости
- Связь между угловой скоростью и нормальным (центростремительным) ускорением
- Основные формулы для расчета углового ускорения
- Угловое ускорение маховика
- Среднее угловое ускорение
- Тангенциальное ускорение
- Мгновенное угловое ускорение
- Угловое ускорение колеса автомобиля
Физика автомобиля для игр.
Автор: Marco Monster
Введение
Эта статья рассказывает о поведении автомобилей в играх, а именно о физике автомобиля.
Одним из ключевых пунктов в упрощении физики транспортного средства является раздельная обработка продольной и боковой силы. Продольная сила работает в направлении корпуса автомобиля (или же в противоположном направлении). Это сила тяги, тормозящая сила, сила трения и сила сопротивления перемещению (= сопротивление воздуха). Вместе эти силы управляют ускорением или замедлением автомобиля, следовательно, и скоростью автомобиля. Боковые силы позволяют автомобилю поворачиваться. Эти силы вызваны поперечным трением на колесах. Мы также рассмотрим угловой момент скорости автомобиля и момент вращения, вызванные боковыми силами.
Примечание и соглашения
Векторы выделены полужирным текстом, мы будем использовать 2d векторы. Так что примечание a = —b означало бы следующее:
На протяжении все этой статьи я буду предполагать, что задние колеса являются ведущими (для четырех ведущих колес нужно применять необходимую адаптацию)
Все физические величины я буду измерять в единицах СИ (метры, килограммы, Ньютоны и т.д.).
Физика движения по прямой
Сначала рассмотрим автомобиль, двигающийся по прямой линии. Какие силы задействованы здесь? Прежде всего, это сила тяги, то есть сила, которая передается двигателем через задние колеса. Двигатель вращает колеса вперед (на самом деле он передает момент вращения на колеса), колеса «толкают назад» поверхность дороги, в результате поверхность дороги выталкивает колеса в противоположном направлении, то есть вперед. Сейчас мы просто положим, что сила тяги эквивалентна по величине переменной Engineforce, которая управляется непосредственно пользователем.
Ftraction = u * Engineforce,
где u — единичный вектор в направлении движения автомобиля.
Если бы это была единственная сила, то автомобиль просто бы ускорился до бесконечной скорости. Ясно, что в реальной жизни дело обстоит совсем не так. Введем силы сопротивления. Первая и обычно наиболее важная — сила воздушного сопротивления, другими словами аэродинамическое сопротивление. Эта сила важна, поскольку она пропорциональна квадрату скорости. Когда мы двигаемся быстро (а какая игра не вовлекает в высокие скорости?) эта сила становится наиболее важной силой сопротивления.
Fdrag = — Cdrag * v * |v|
где Cdrag константа, v — вектор скорости и |v| — модуль вектора v, являющийся длиной вектора v.
Длина вектора скорости обычно известна как скорость. Обратите внимание на различие типа данных: скорость — скаляр, скорость — вектор. Используйте приблизительно следующий код:
Так же, еще есть сопротивление вращения. Это вызвано трением между резиной и дорожной поверхностью, так как колеса прокручиваются, трением на осях и т.д. Мы обозначим это силой, которая пропорциональна скорости, с использованием другой константы.
При низких скоростях трение (Frr) является основной силой сопротивления, при высоких скоростях Fdrag превышает по значению Frr. Приблизительно при 100 км/час (60 миль в час, 30 м/с) они равны ([Zuvich]). Это означает, что Crr должен быть равен приблизительно 30-ти Cdrag.
Общая продольная сила — это векторная сумма этих трех сил.
Обратите внимание, что если вы двигаетесь по прямой линии, то силы аэродинамического сопротивления и трения будут направлены противоположно силе тяги (Ftraction). То есть вы вычитаете силу аэродинамического сопротивления из силы сцепления. И когда автомобиль движется с постоянной скоростью, то силы находятся в равновесии, и Flong равен нулю.
Ускорение (a) автомобиля (в м/с 2 ) определено равнодействующей силой автомобиля (в Ньютонах) и массой автомобиля М (в килограммах) по второму закону Ньютона:
Скорость автомобиля (в метрах в секунду) определяется, как интеграл ускорения через какое-то время (dt). Это звучит слишком сложным, но следующее уравнение поможет нам. Воспользуемся методом Эйлера для численного интегрирования.
v = v + dt * a,
где dt — промежуток времени между предыдущим и текущим вызовами просчета физики.
Позиция автомобиля свою очередь определяется, как интеграл скорости по dt.
Используя эти три силы, мы уже довольно точно можем моделировать ускорение автомобиля. Вместе они также определяют максимальную скорость автомобиля для данной мощности двигателя. То есть, нет необходимости устанавливать максимальную скорость где-нибудь в коде, она автоматически вычисляется из уравнений. Дело в том, что уравнения формируют своего рода цикл отрицательной обратной связи. Если сила тяги (Ftraction) превышает все другие силы, то автомобиль ускоряется. Увеличивающаяся скорость, также заставляет увеличиваться силы сопротивления. Равнодействующая сила уменьшается, а следовательно уменьшается и ускорение. В некоторой точке силы сопротивления и сила тяги компенсируют друг друга, и автомобиль достигает своей максимальной скорости для данной мощности двигателя.

На этом графике Ось X обозначает скорость автомобиля в метрах в секунду и значения силы, которая отмечена по Оси Y. Значение силы тяги (темно синий) установлено произвольно, оно не зависит от скорости автомобиля. Трение (пурпурная линия) — линейная функция скорости, и сопротивление (желтая кривая) — квадратичная функция скорости. При низких скоростях трение превышает аэродинамическое сопротивление. При 30 м/с эти две функции пересекаются. При более высоких скоростях аэродинамическое сопротивление является наибольшей силой сопротивления. Сумма из двух сил сопротивления показана светло-синей кривой. При 37 м/с эта кривая пересекает горизонтальную линию силы тяги. Это — максимальная скорость для данной мощности автомобиля (37 м/с = 133 км/час = 83 мили в час).
Формула для вычисления углового ускорения
Угловое ускорение – что это?
Угловое ускорение (varepsilon) – физическая величина, характеризующая изменение угловой скорости при движении тела.
Единица измерения: (lbrackvarepsilonrbrack=frac1<с^2>) или (с^<-2>)
Угловая скорость
Круговым движением точки вокруг оси называют движение, где траектория точки – окружность с центром, который лежит на оси вращения, перпендикулярной плоскости окружности.
Угловая скорость (omega) – векторная физическая величина, характеризующая скорость изменения угла поворота при круговом движении точки или твердого тела.
При движении по окружности (круговом движении) скорость меняет свое направление, значит такое движение не может считаться равномерным, оно ускоренное или равноускоренное (в частных случаях).
Вектор угловой скорости направлен вдоль оси вращения.
Основные формулы для вычисления угловой скорости
Для равномерного вращения (когда за равные отрезки времени тело поворачивается на один и тот же угол):
- (omega=frac nt) , где (n) – количество оборотов за единицу времени (t) .
- (omega=fracvarphi t) , где (varphi) – угол поворота, (t) – время, за которое он совершен.
- (omega=frac<2pi>T) , где (Т) – период обращения (время, за которое тело/точка совершает один оборот).
- (omega=2pinu) , где (nu) – числом оборотов в единицу времени.
Единица измерения угловой скорости в СИ: (lbrackomegarbrack=frac<рад>с)
Связь между угловой скоростью и нормальным (центростремительным) ускорением
Центростремительное (нормальное) ускорение (a_n) – это составляющая полного ускорения, которая характеризует изменение направления вектора скорости при криволинейном движении. Другим компонентом полного ускорения является тангенциальное ускорение, оно характеризует изменение величины скорости.
Центростремительное ускорение определяется по формуле:
где (V) – скорость движения, (R) – радиус окружности.
Единица измерения в СИ: (lbrack a_nrbrack=frac м<с^2>)
Итак, формула связывающая эти две величины:
Основные формулы для расчета углового ускорения
Значение углового ускорения в определенный момент времени вычисляется как первая производная от угловой скорости или вторая производная от угла поворота по времени.
Угловое ускорение маховика
(varepsilon=fracomega t=frac<2pi n>t) , где (n) – количество оборотов за единицу времени (t) .
Среднее угловое ускорение
Средним угловым ускорением тела называют отношение изменения угловой скорости к отрезку времени, за который оно совершилось.
Тангенциальное ускорение
Тангенциальным (касательным) ускорением (a_tau) называют ту составляющую полного ускорения, которая направлена по касательной к траектории движения в данной точке. Тангенциальное ускорение описывает изменение скорости по модулю при криволинейном движении.
(a_tau=varepsilon r) , где (varepsilon) – угловое ускорение, (r) – радиус кривизны траектории в заданной точке.
Мгновенное угловое ускорение
Мгновенное угловое ускорение (alpha) есть первая производная угловой скорости по времени или вторая производная углового перемещения по времени.
Угловое ускорение колеса автомобиля
Конечно, нельзя, основываясь на школьном курсе физики, обсчитать и описать все поведение автомобиля в меняющихся дорожных условиях. Но некоторые моменты могут быть рассчитаны довольно точно при минимальных упрощениях и допущениях. Просто большинство автолюбителей не задумывается над этим, а если и понимает описанные процессы на интуитивном уровне, то до расчетов у них как правило дело не доходит.
Эта статья — попытка простым языком описать некоторые моменты физики взаимодействия автомобиля с дорогой. А тех, кому на первый взгляд в начале изложении все показалось знакомым и примитивным, стоит все-таки просмотреть статью до конца: здесь есть некоторые неочевидные выводы или, по крайней мере, интересные цифры и ссылки.
Исходные положения и допущения
Приводимые ниже определения вполне сознательно немного упрощены — их нестрогость не повлияет на точность дальнейших рассуждений, но облегчит понимание процессов и закономерностей. Кроме того, будем считать, что в узлах трансмиссии нет трения — оно невелико по сравнению с действующими в них силами. Эти потери будут оценены отдельно.
Радиус колеса R для простоты везде и всегда будем считать равным внешнему радиусу покрышки, допуская, что деформация колеса в зоне контакта с дорогой невелика. При расчете размеров колеса удобно пользоваться шинным калькулятором. Для штатной резины Нивы (175/80R16) радиус колеса R=0,343 м.
Скорость автомобиля V, ускорение a. Еще нам потребуются угловая скорость вращения колес w =V/R и угловое ускорение e =a/R.
Крутящий момент (момент силы) M равен произведению силы F на плечо. В формулах вращательного движения крутящий момент занимает то же место, что и сила при прямолинейном движении. Для нашего случая данного определения вполне достаточно, причем плечо будет равно радиусу колеса R:
Передаточное отношение i в механике определяется, как отношение угловых скоростей входного и выходного валов передачи. Применительно к автомобилю угловые скорости принято считать в оборотах в минуту n:
Здесь действует так называемое «золотое правило механики»: во сколько раз мы проигрываем в скорости и пути, во столько же раз выигрываем в силе, и соотношение крутящих моментов на валах передачи обратно соотношению скоростей:
При нескольких передачах общее передаточное отношение равно произведению передаточных отношений.
Сила трения возникает как реакция при попытке смещения одного тела относительно поверхности другого сдвигающей силой, приложенной параллельно этой поверхности. Рассмотрим процесс трения последовательно — по мере роста сдвигающей силы.
При небольших значениях сдвигающей силы движению тела препятствует сила трения (реакция поверхности). Она равна приложенной силе, но действует в противоположном направлении. В результате тело остается в покое. По мере роста сдвигающей силы будет расти и сила трения. И это будет продолжаться до тех пор, пока сдвигающая сила не превысит порог Fтр max, после которого тело начнет двигаться. Величину Fтр max определяют через коэффициент трения kт, равный отношению Fтр max к перпендикулярной поверхности прижимающей силе, точнее, равной ей по величине силе реакции N:
Обязательно нужно отметить, что при переходе к скольжению сила трения скачком уменьшается. Это знает каждый автомобилист: тормозной путь с заблокированными колесами больше, чем в случае, когда колеса тормозят, но вращаются со скоростью автомобиля «на пределе». Именно поэтому самый короткий тормозной путь обеспечивает система ABS, контролирующая вращение колес при торможении и не позволяющая им заблокироваться.
Нас будет интересовать только сила трения между колесом и поверхностью дороги. Коэффициент трения сильно зависит от состояния трущихся поверхностей. Для сухого асфальта коэффициент трения доходит до 0,8, а при наличии пленки воды он падает до 0,1. 0,2, на обледеневшей поверхности — еще меньше.
Момент инерции J материальной точки массой m, вращающейся по окружности радиусом r, равен:
Ниже нас будет интересовать только момент инерции колеса Jк. Точно рассчитать момент инерции такого сложного по форме тела затруднительно. На основании приближенного расчета, приведенного в Приложении, будем считать, что момент инерции колеса, складывающийся из моментов инерции покрышки (п) и диска (д), определяется формулой:
Второй закон Ньютона определяет зависимость между приложенной к телу силой F, массой тела m и ускорением a:
Для вращательного движения этот закон имеет вид:
Принцип суперпозиции позволяет отдельно рассматривать и рассчитывать составляющие сложного движения. Применительно к настоящей статье будем рассматривать отдельно поступательное движение автомобиля (включая колеса) и вращательное движение колес. Допущением здесь будет то, что мы будем применять принцип суперпозиции в том числе и при ускоренном движении автомобиля.
Расчет скорости и крутящего момента
Передаточные отношения трансмиссии iт для ВАЗ-21213/214 с пятиступенчатой коробкой передач, двухступенчатой раздаткой и редукторами 3,9 (точнее, 43/11) сведены в таблицу:
Передача
в раздатке
Чтобы узнать крутящий момент на одном (каждом!) колесе Mк, нужно взять крутящий момент двигателя Mдв, умножить его на значение iт из таблицы и разделить на количество ведущих колес (для Нивы — на четыре).
Скорость автомобиля V [км/час] по оборотам двигателя nдв [об/мин] и радиусу колеса R [м] можно рассчитать по формуле:
Коэффициент 0,377 учитывает все остальные параметры, включая размерность. Подчеркну, что допущение об отсутствии деформации колеса на точность расчета скорости не влияет: здесь все определяет длина окружности колеса, которая рассчитывается по радиусу как 2 p R.
Примечание. Участники конференции vasak и Loggy, которых я попросил посмотреть статью до ее публикации, считают, что деформация колеса в зоне контакта влияет на расчет скорости. В частности, vasak считает , что в формулу следует подставлять радиус нагруженного колеса. Решено провести экспериментальную проверку, результаты которой будут опубликованы.
Почему машина едет
Парадоксально, но факт: машину «толкает» дорога. Покажем, почему это так.
Двигатель создает крутящий момент Mдв. После преобразования трансмиссией этот момент передается на каждое ведущее колесо машины в виде Mк и заставляет колесо вращаться, т. е. создает сдвигающую силу Fкт=Mк/R в точке контакта колеса с дорогой, причем эта сила через колесо приложена к дороге. Поверхность дороги препятствует вращению колеса силой трения Fрт той же величины, но приложенной к колесу и направленной противоположно. Чтобы показать, что силы действуют на разные объекты, точки приложения сил на рисунке условно немного разнесены по вертикали:
Эта сила реакции трения Fрт, умноженная на число ведущих колес, и движет машину. Применительно к Ниве разгоняющим усилием будет величина 4Fрт. Определим эту величину.
Максимальный крутящий момент Mдв=127 Н . м двигатель ВАЗ-21213 развивает при 3200-3400 об/мин (это паспортные данные двигателя 1,7). Значит, на первой передаче в КПП при пониженной в раздатке суммарный крутящий момент на колесах будет равен:
При колесах штатного размера тяговое усилие всех четырех колес составит:
При нормальной передаче в раздатке сила станет в 1,78 раза меньше и будет уменьшаться дальше при повышении передач в КПП. При тех же оборотах двигателя на пятой передаче тяговое усилие составит всего 152 кГ.
В узлах трансмиссии неизбежно существует трение. Согласно «Деталям машин» Д. Н. Решетова КПД закрытой среднескоростной цилиндрической одноступенчатой зубчатой передачи составляет около 98%, конической — около 97%. В коробке передач мы имеет две ступени (от первичного вала к промежуточному и от промежуточного к вторичному). Аналогично — две ступени в раздатке. Все эти передачи — цилиндрические. А в мостах — гипоидные передачи, близкие к коническим. Поэтому КПД трансмиссии будет приблизительно равен:
К этому добавятся еще потери на трение в карданах, ШРУСах и подшипниках. Поэтому из-за трения в узлах трансмиссии реальные значения усилий будут примерно на 10-15% меньше рассчитанных.
Вспомним о силе трения и коэффициенте трения между колесом и поверхностью дороги. Если Fкт=Mк/R меньше максимальной силы трения Fрт max, машина будет нормально разгоняться силой 4Fрт. Если же Mк/R>Fрт max, то избыток крутящего момента пойдет просто на раскручивание ведущих колес — они начнут буксовать. На заснеженном или обледеневшем асфальте часто можно наблюдать такое у моноприводных машин, иногда они даже не могут тронуться с места. Поскольку у Нивы крутящий момент распределен на четыре колеса, каждая из сил Fрт оказывается вдвое меньше, чем у машин с неполным приводом, а максимальная сила трения примерно такая же. Это дает значительное преимущество Ниве при разгоне на зимней дороге. Но не нужно забывать, что тормозят и моноприводные машины, и Нива — всеми четырьмя колесами.
О силах, противодействующих разгону автомобиля на горизонтальной дороге, можно почитать статьи, скопированные с сайта http://autotheory.by.ru: «Момент сопротивления качению» и «Аэродинамическое сопротивление автомобиля».
Особое внимание обратим на последний фактор — сопротивление воздуха растет пропорционально квадрату скорости и после 100 км/час на горизонтальном участке дороги оно превышает все иные противодействующие движению силы, взятые вместе. В результате именно сопротивление воздуха определяет максимальную скорость автомобиля. Подробнее о максимальной скорости будет сказано в конце статьи.
Рассмотрим силы, действующие на автомобиль на наклонной плоскости с углом a к горизонту:
Вес автомобиля P можно разложить на две составляющие. Первая (Psin a ) — скатывающая сила — направлена параллельно поверхности и противодействует подъему автомобиля, ее и должно преодолеть тяговое усилие 4Fрт, чтобы машина взяла подъем. Вторая (Pcos a ), направленная перпендикулярно дороге, прижимает колеса к поверхности и обеспечивает их трение о дорогу и силу реакции N=-Pcos a . На рисунке показаны равнодействующие сил реакции и трения всех четырех колес. Хочу подчеркнуть, что прижимающая сила стала меньше на величину cos a , т. е. по сравнению с горизонтальным участком дороги предельная сила трения стала меньше:
Расчет тягового усилия (максимум 1155 кГ) хорошо согласуется с паспортными данными Нивы о преодолеваемом уклоне 58% (tg30 о =0,58). Разрешенная максимальная масса ВАЗ-21312 равна 1870 кг, sin30 о =0,5, значит, тяговое усилие должно быть не меньше 1870 . 0,5=935 кГ.
Подъем будет взят только в том случае, если сцепление колес с дорогой окажется достаточным для обеспечения такой силы тяги при прижимающем усилии, составляющем 87% веса машины (cos30 o =0,87).
При дальнейшем увеличении крутизны подъема скатывающая сила будет расти, а прижимающая сила и предельная сила трения — уменьшаться.
Важное замечание. Преобразование крутящего момента в трансмиссии сопровождается образованием внутренних реактивных сил в узлах трансмиссии, причем эти силы тем больше, чем бОльший крутящий момент ею передается. Превышение некоторого порога может привести к разрушению элементов трансмиссии, в чем автор имел неосторожность убедиться на собственном опыте.
При попытке штурма довольно крутого подъема в Крылатском машине не хватало сцепления с почвой, и колеса буксовали. Чтобы улучшить сцепление, на колеса передней оси были одеты цепи и включена блокирвка дифференциала в раздатке. Все это привело к существенному возрастанию момента на передних колесах и вывело из строя редуктор переднего моста: подшипник ведущего вала РПМ выдавило вместе с куском стенки картера размером 10х10 см.
Напомню, что при заблокированной раздатке крутящий момент в ней направляется в сторону наибольшего сопротивления вращению (см. статью Привод Нивы), т. е. в сторону переднего моста, где цепи обеспечивали хорошее сцепление с почвой. Цепи — «лесенки», образованные поперечными цепными перемычками с интервалом около 25 см. Поэтому колесо проворачивалось рывками с проскальзыванием в промежутках между цепными перемычками, т. е. возникала ударная нагрузка. Во время одного из рывков реактивная сила, передаваемая подшипником ведущего вала на стенку РПМ, превысила предел прочности стенки.
Разгон и торможение
По второму закону Ньютона суммарная сила Fрт всех ведущих колес разгоняет автомашину массой mа с ускорением a. Но часть крутящего момента расходуется на раскручивание колес. Рассмотрим этот вопрос подробнее.
По принципу суперпозиции движение колеса можно рассматривать как сумму двух движений: прямолинейное вместе со всей машиной со скоростью V и вращение вокруг оси:
Если колесо не проскальзывает относительно поверхности (нет заноса), мгновенная скорость в зоне контакта (самой нижней точке колеса) должна быть равна нулю — там прямолинейная скорость движения машины (и оси колеса) V компенсируется такой же по величине, но противоположно направленной скоростью вращения назад. А в самой верхней точке скорость вращения колеса складывается с прямолинейной скоростью и оказывается равной 2V. При таком вращении угловая скорость колеса равна w =V/R.
При равномерном движении ускорение автомобиля a и угловое ускорение колеса e равны нулю. Весь момент 4Mк идет на создание тягового усилия 4Fрт=4Mк/R и преодоление сопротивления движению автомобиля. Но на этапе разгона, когда ускорение a>0, помимо разгона автомобиля массой mа нужно еще обеспечить колесам с моментом инерции Jк угловое ускорение e =a/R>0 . Поэтому Fрт . R+4Jк . e =mа . a . R+4Jк . a/R.
Здесь большая часть момента (первое слагаемое) разгоняет автомобиль силой 4Fрт, а второе слагаемое — раскручивает колеса.
Если разделить второй член суммы на первый, мы получим долю момента, приходящуюся на раскручивание колес:
Масса штатного колесного диска 16″ mд=9,3 кг (данные Nivandy), масса штатной покрышки ВлИ-10 с камерой mп=12 кг. Тогда:
Jк=0,78mдRд 2 +0.85mпR 2 =0,78 . 9,3 . 0,203 2 +0,85 . 12 . 0,343 2 =0,30+1,20=1,50 кг . м 2 .
Массу Нивы с одним водителем примем равной mа=1300 кг. Тогда:
Итак, доля крутящего момента, расходуемая на раскрутку колес штатного размера, равна 3,9%. В дальнейшем эта цифра нам пригодится.
Строго говоря, раскрутить нужно не только колеса, но и все вращающиеся элементы трансмиссии. Но доля колес в общем моменте инерции вращающихся деталей на один-два порядка больше, чем у любой другой вращающейся детали трансмиссии. Поэтому их вращением будем пренебрегать.
Процессы при торможении аналогичны разгону, только колеса затормаживаются тормозными колодками, которые создают момент, противодействующий вращению колес. Этот момент тоже делится на две неравные части. На снижение скорости движения автомобиля расходуется та часть момента, за счет которой колеса тормозятся о поверхность дороги. Но часть тормозного момента пойдет на снижение скорости вращения колес. И чем больше момент инерции колес, тем меньшая часть момента пойдет на снижение скорости собственно автомобиля.
Колесо стало больше
Пусть на Ниву вместо колес штатного размера поставили колесо бОльшего диаметра, например, Я-569 (235/75R15). Как это сделать (проставки под шаровые, резка арок и проч.) — не является предметом настоящей статьи. Нас интересует, как изменится динамика машины, и под этим мы будем понимать изменение ускорения при разгоне машины.
Радиус Я-569 0,369 м, т. е. дорожный просвет (клиренс) увеличится на 369-343=26 мм (примерно на дюйм). Посчитаем, чем придется заплатить за это повышение проходимости.
Радиус колеса увеличился относительно штатного размера колеса на 7,6%. Это означает, что при прежнем крутящем моменте на колесе Mк из-за увеличения радиуса R силы Fкт=Fрт=Mк/R будут меньше на 7.6%, т. е. динамика машины будет хуже.
Общая масса автомобиля возросла на величину:
Из-за этого масса автомобиля стала равной mа=1300+50,8=1350,8 кг, т. е. больше на 50,8/1300=3,9%. Из-за этого при прежней силе Fрт ускорение a=Fрт/mа уменьшится на те же 3,9%.
А теперь определим влияние момента инерции этих колес. Масса бескамерной покрышки Я-569 20 кг. Масса штампованного диска 15″ от УАЗа около 14 кг (данные Nivandy). Считаем:
Jк=0,78mдRд 2 +0,85mпR 2 =0,78 . 14 . 0,19 2 +0,85 . 20 . 0,369 2 =0,39+2,31=2,70 кг . м 2
Доля крутящего момента, расходуемого на раскрутку колес:
4Jк/mа . R 2 =4 . 2,70/1350,8 . 0,369 2 =0,059=5,9%.
Вспомним, что при штатных колесах на их раскрутку тратилось 3,9% крутящего момента. Из-за необходимости раскрутить более массивные колеса на разгон автомобиля пойдет часть момента еще на 2,0% меньшая.
Посчитаем общее ухудшение динамики при установке колес большого диаметра:
1,076 . 1,039 . 1,020=1,140.
Итого из-за установки колес Я-569 на дисках от УАЗа динамика ухудшается на 14,0%.
Нива была создана как компромисс между шоссейным автомобилем и вездеходом. Она имеет вполне приличную динамику и скорость, позволяющую ей ехать по шоссе, практически ни в чем не уступая другим легковым автомобилям. И вместе с тем у Нивы вполне приличная проходимость вне асфальта. Колеса большого диаметра нарушают этот компромисс в сторону внедорожности. Впрочем, крутизна преодолеваемого подъема также уменьшится.
Возникает вопрос: как сохранить динамику?
В формуле, связывающей крутящий момент, радиус колеса и силу, мы пока изменили только один член — радиус. Чтобы сохранить динамику прежней, нужно увеличить крутящий момент на колесах. Это означает, что нужно либо поставить двигатель с бОльшим крутящим моментом (дорого, да и выбор мал), либо переделать трансмиссию так, чтобы при том же моменте двигателя момент на колесах стал больше, т. е. изменить ее передаточное отношение.
КПП для Нивы выпускается только с одним набором передаточных отношений, раздатка — тоже. Остается одновременная замена редукторов переднего и заднего моста, и этот выбор не так уж и мал. Производятся серийно и есть в обычных магазинах запчастей передние и задние редукторы с передаточными отношениями 3,9, 4,1 и 4,3 (подробности — в соответствующих статьях FAQ: здесь и здесь). Ранее выпускались редукторы 2102 (передаточное отношение 4,44). Существуют тюнинговые главные пары редукторов с передаточными отношениями 5,25 и др.
Штатно в 21213/214 ставятся редукторы с передаточным отношением 3,9 (точнее, 43/11=3,91). Если поменять их на редукторы 4,1, момент на колесах вырастет на 4,9%, а если на 4,3 — то на 10%. Но даже в последнем случае при резине Я-569 динамика все-таки будет хуже, чем на резине штатного размера.
Немного улучшить положение могут легкосплавные диски с меньшей массой. Но выигрыш не так велик, как хотелось бы. Для иллюстрации по той же методике пересчитаем изменение динамики (относительно штатных колес) для Я-569 на легкосплавных дисках «Эллада» с массой 5,2 кг.
Радиус покрышки тот же, что и в предыдущем расчете, поэтому Fкт=Fрт=Mк/R будут меньше на 7.6%, чем при штатных колесах.
Общая масса машины (опять относительно штатных колес) увеличилась на:
Из-за этого при прежней силе Fрт ускорение a уменьшится на 15,6/1300=1,2%.
Момент инерции колеса:
Jк=0,78mдRд 2 +0,85mпR 2 =0,78 . 5,2 . 0,19 2 +0,85 . 20 . 0,369 2 =0,15+2,31=2,46 кг . м 2 .
Доля крутящего момента, расходуемого на раскрутку колес:
4Jк/mа . R 2 =4 . 2,46/1315,6 . 0,369 2 =0,055=5,5%.
Относительно 3,9% для штатных колес проигрыш 1,6%.
Общее ухудшение динамики:
1,076 . 1,012 . 1,016=1,106.
Следовательно, при Я-569 на легкосплавных дисках динамика ухудшится на 10,6%.
Колеса 14″, вылет и плечо обката
Есть такие любители уродовать Ниву — они ставят на на нее волговские колеса 14 дюймов с нулевым вылетом. Клиренс, разумеется, будет меньше, но динамика машины вырастет: при меньшем радиусе R и прежнем моменте Mк сила Fкт=Fрт=Mк/R станет больше. К тому же уменьшится масса и момент инерции колес. Но в этом параграфе речь будет идти не о динамике, а о влиянии вылета колесных дисков на нагрузку ступичных подшипников и плечо обката.
Взаимодействие ступицы с колесом удобно представить силой, лежащей в плоскости симметрии колеса (т. е. в средней плоскости колеса). Вылет — расстояние между этой плоскостью симметрии и посадочной плоскостью, где диск крепится к ступице. Иллюстрирующий это рисунок взят с сайта http://www.protcar.com:
У штатного диска Нивы положительный вылет колеса, равный 58 мм (ЕТ58), он соответствует среднему рисунку.
Сначала заметим, что устойчивость машины на дороге в значительной степени определяется величиной отношения ширины колеи к колесной базе (расстоянию между осями). Колесные диски с нулевым вылетом расширят колею на 58 . 2= 116 мм, что заметно ухудшит устойчивость Нивы.
А теперь разберемся с нагрузкой на ступичные подшипники. Мнение, что из-за слишком малого вылета волговских дисков подшипники приходится менять буквально на каждом ТО, в конференции существует давно. Обоснуем это утверждение.
Вспомним, как устроена ступица переднего колеса Нивы (посмотреть это можно в иллюстрированном альбоме). Нагрузку F, действующую в плоскости симметрии колеса, принимают на себя два упорных роликовых подшипника, в которых возникают силы реакции N1 и N2. Эти силы и определяют степень нагруженности подшипников:
Нагрузка F — это равнодействующая всех сил, действующих на колесо в продольной плоскости, т. е. не только вес машины, приходящийся на колесо, но и всевозможные удары при наезде на препятствия, кочки и выбоины, причем эти удары могут создавать нагрузку, на порядок большую, чем вес.
В зависимости от точки приложения силы F относительно подшипников силы N1 и N2 меняются. В принципе, подобный объект — балка на двух опорах — является предметом курса «Сопротивление материалов», но вывод расчетных формул очень прост. Достаточно применить познания из курса элементарной физики и рассматривать балку как рычаг.
Принимаем за точку опоры рычага подшипник 1. Поскольку рычаг неподвижен, моменты сил F и N2 должны уравновешивать друг друга:
Можно составить такое же уравнение для определения N1, но удобнее использовать тот факт, что сила F в точности уравновешивается реактивными силами (результат будет тот же):
С реальных запчастей были сняты размеры. Оказалось, что расстояние между подшипниками (по серединам) составляет 36 мм, а при штатном диске точка приложения силы F оказывается на 4 мм глубже середины расстояния между подшипниками. При штатном диске нагрузка делится между подшипниками следующим образом:
Для штампованных стальных (ЕТ48) и легкосплавных (ЕТ40) дисков Шеви-Нивы:
Для легкосплавных дисков «Нива» (ВСМПО, ЕТ28) и волговских дисков (ЕТ0):
Обратите внимание, что при вылетах меньше 36 мм нагрузка внутреннего (левого на рисунках) подшипника меняет знак, а на внешнем (правом) становится больше приложенной силы F.
Получается, что при дисках с нулевым вылетом нагрузка внешнего подшипника ступицы в 5,1 раза больше, чем при штатном диске. Если за отправную точку взять нагрузку внутреннего подшипника при штатном диске, это превышение составит 3,3 раза. Отсюда и скорый выход из строя внешнего ступичного подшипника.
При поворотах автомобиля возникает боковое усилие на колесах, которое порождает крутящий момент в вертикальной плоскости, проходящей через ось оси ступицы. Момент уравновешивается парой сил реакции на ступичных подшипниках:
Величина этих сил определяется соотношением между радиусом колеса R и расстоянием между подшипниками L и от значения вылета не зависит:
F . R=N . L; N=F . R/L.
Для штатного размера колес отношение R/L=343/36=9,53, т. е. нагрузка подшипников в повороте примерно в 10 раз больше бокового усилия на колесе. На крутых поворотах это тонны.
А теперь вспомним, что такое плечо обката. Очень хорошо это иллюстрирует рисунок с сайта журнала «За рулем»:
Центр зоны контакта колеса с дорогой (левые оси на рисунках) смещен относительно оси поворота колеса (правые оси, проходящие через шаровые опоры a и b) на величину плеча обката А. Поэтому для поворота колеса нужно преодолеть момент силы трения Mт=Fт . A. При увеличении плеча обката пропорционально будет расти и этот момент.
Вот данные Сергея Мишина о плече обката Нивы и Шеви-Нивы:
![]()
Download Article
Different ways to calculate rotation speed
![]()
Download Article
Most people have a general understanding of the idea of velocity and acceleration. Velocity is the measure of how fast an object is moving, and acceleration is the measure of how quickly the object’s velocity is changing (i.e., speeding up or slowing down). When the object is moving in a circle, such as a spinning tire or a rotating CD, velocity and acceleration are generally measured by the angle of rotation. They are then called angular velocity and angular acceleration. If you know the object’s velocity over some period of time, you can calculate its average angular acceleration. Alternatively, you may have a function to calculate the object’s position. With this information, you can calculate its angular acceleration at any chosen instant.
-
1
Determine the function for angular position. In some cases, you may be provided with a function or formula that predicts or assigns the position of an object with respect to time. In other cases, you may derive the function from repeated experiments or observations. For this article, we assume that the function has been provided or previously calculated.[1]
-
2
Find the function for angular velocity. Velocity is the measure of how fast an object changes its position. In layman’s terms, we think of this as its speed. In mathematical terms, the change of position over time can be found by finding the derivative of the position function. The symbol for angular velocity is
. Angular velocity is generally measured in units of radians divided by time (radians per minute, radians per second, etc.).[2]
Advertisement
-
3
Find the function for angular acceleration. Acceleration is the measure of how fast an object’s velocity is changing over time. You can mathematically calculate the angular acceleration by finding the derivative of the function for angular velocity. Angular acceleration is generally symbolized with
, the Greek letter alpha. Angular acceleration is reported in units of velocity per time, or generally radians divided by time squared (radians per second squared, radians per minute squared, etc.).[3]
-
4
Apply the data to find instantaneous acceleration. Once you have derived the function for instantaneous acceleration as the derivative of velocity, which in turn is the derivative of position, you are ready to calculate the instantaneous angular acceleration of the object at any chosen time.[4]






Advertisement
-
1
-
2
Measure final angular velocity. The second piece of information that you need is the angular velocity of the spinning or rotating object at the end of the time period that you want to measure. This is to be called the “final” velocity.[6]
- A compact disc plays in the machine by rotating at an angular velocity of 160 radians per second.
- The roller coaster, after applying its brakes to the spinning wheels, ultimately reaches an angular velocity of zero when it stops. This will be its final angular velocity.
-
3
Measure the elapsed time. To calculate the average angular velocity of the spinning or rotating object, you need to know the amount of time that passes during your observation. This can be found by direct observation and measurement, or the information can be provided for a given problem.[7]
- The owner’s manual for the CD player provides the information that the CD reaches its playing speed in 4.0 seconds.
- From observations of roller coasters being tested, it has been found that they can come to a complete stop within 2.2 seconds from when the brakes are initially applied.
-
4
Calculate the average angular acceleration. If you know the initial angular velocity, the final angular velocity, and the elapsed time, fill that data into the equation and find the average angular acceleration.[8]




Advertisement
-
1
Understand the concept of angular motion. When people think of the speed of an object, they often consider linear motion – that is, objects traveling mostly in a straight line. This would include a car, a plane, a ball that is thrown or any number of other objects. However, angular motion describes objects that spin or rotate. Think of the earth spinning on its axis. The position or speed of the earth can be measured with angular quantities. A spinning compact disc (or record player, if you’re old enough), electrons on their axes, or the wheels of a car on the axle are other examples of rotating objects that can be measured through angular motion.[9]
-
2
Visualize angular position. When you measure the position of a moving vehicle, for example, you can measure the distance traveled in a straight line from the starting point. With a rotating object, the measurement is generally done in terms of the angle around a circle. By convention, the starting or “zero” point is generally a horizontal radius from the center to the right side of the circle. The distance traveled is measured by the size of the angle
, measured from that horizontal radius.[10]
- The angle that is being measured is commonly represented by , the Greek letter theta.
- Positive motion is measured in a counterclockwise direction. Negative motion is measured in a clockwise direction.
- The angle that is being measured is commonly represented by
-
3
Measure angular motion in radians. Linear travel is generally measured in some unit of distance, such as miles, meters, inches or some other unit of length. Rotational or angular motion is generally measured in units called radian. A radian is a fraction of the circle. For standard reference, mathematicians use the “unit circle,” which has a standard radius of 1 unit.[11]
-
4
Understand the concept of angular acceleration. Angular acceleration is the measurement of how fast or slow a rotating object is changing its velocity. In other words, is the spinning speeding up or slowing down? If you know the angular velocity at a starting time and then at a later ending time, you can calculate the average angular acceleration over that time interval. If you know the function for the object’s position, you can use calculus to derive the instantaneous angular acceleration at any chosen time.[12]
- People often use the word “acceleration” to mean speeding up, and “deceleration” to mean slowing down. In mathematical and physical terms, however, only the word “acceleration” is used. If the object is speeding up, the acceleration is positive. If it is slowing down, the acceleration is negative.





Advertisement
Add New Question
-
Question
What are the formulas to find the initial acceleration of an object?

Initial acceleration generally has to be given as a condition of the problem or the experiment.
-
Question
What is the direction of radial and tangential acceleration and how do they affect each other?
Angular (or radial) measurements are generally counterclockwise. Tangential acceleration means the straight line direction of the tangent at some measured point along the circle. The tangent is a line that is perpendicular to the radius at that point.
-
Question
How can you find angular acceleration in revolutions per second squared?
This article shows how to find acceleration in radians per second squared. To convert the number of radians to the number of revolutions, recall that 1 full circle (or 1 revolution) is equal to 2pi radians. This is roughly equivalent to 6.28 radians per revolution. If you know the acceleration in radians per second squared, divide that answer by 6.28 to get revolutions per second squared.
Ask a Question
200 characters left
Include your email address to get a message when this question is answered.
Submit
Advertisement
Video
-
Remember to express final results with the proper units. Angular position is usually expressed in radians. Angular velocity is expressed in radians per time. Angular acceleration is expressed in units of radians per time squared.
Thanks for submitting a tip for review!
Advertisement
References
About This Article
Article SummaryX
To calculate instantaneous angular acceleration, start by determining the function for angular position, or the position of the object with respect to time. Next, find the angular velocity, which is the measure of how fast the object changes its position. Then, find the derivative of the function for angular velocity in order to determine the function for angular acceleration. Finally, plug in the data to find the instantaneous acceleration of the object at any chosen time. To learn more, including how to calculate average angular acceleration, read on.
Did this summary help you?
Thanks to all authors for creating a page that has been read 90,899 times.
