
Пример решения задачи по определению углового ускорения кривошипа, вращающегося под действием момента M, в эпициклическом механизме, без учета сил трения.
Задача
В эпициклическом механизме (рисунок 4.1) кривошип с противовесом вращается под действием приложенного к нему момента M. Момент инерции кривошипа с противовесом относительно оси его вращения равен J0.
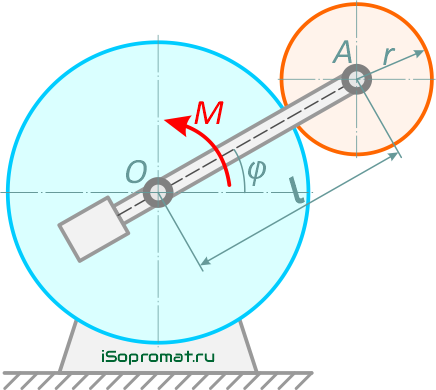
Рисунок 4.1
Центр тяжести бегущей шестерни и кривошипа с противовесом находится на оси вращения кривошипа. Расстояние между осями шестерен равно l. Бегающая шестерня имеет радиус r1, массу m1 и момент инерции относительно ее оси J1. Определить, пренебрегая трением, угловое ускорение кривошипа.
Другие примеры решений >
Помощь с решением задач >
Решение
Рассматриваемая система имеет одну степень свободы. За обобщенную координату системы примем угол поворота кривошипа φ, отсчитанный от горизонтали.
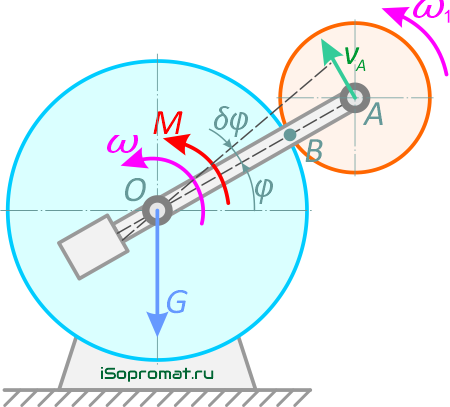
Чтобы воспользоваться уравнением Лагранжа второго рода, определим кинетическую энергию системы как функцию обобщенной координаты φ и обобщенной скорости φ’, равной угловой скорости кривошипа ω.
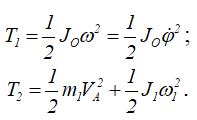
Кинетическая энергия системы равна сумме кинетической энергии T1 кривошипа с противовесом, вращающегося вокруг неподвижной оси, и кинетической энергии T2 бегающей шестерни, совершающей плоское движение.
Скорость центра масс шестерни
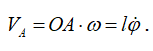
Угловую скорость бегающей шестерни ω1 определим при помощи мгновенного центра скоростей, находящегося в точке B соприкасания шестерен:
Тогда для T2 получаем
Кинетическая энергия системы
Найдем производные
Чтобы найти обобщенную силу Qφ, соответствующую обобщенной координате φ, дадим системе возможное перемещение, сообщив углу φ приращение δφ. Составим сумму элементарных работ задаваемых сил на этом возможном перемещении. В эту сумму войдет только работа вращающего момента, определяемая по формуле
![]()
Обобщенную силу получим по формуле
Подставим найденные выражения в уравнение Лагранжа второго рода
получим
откуда находим угловое ускорение кривошипа
Другие примеры решения задач >
Сохранить или поделиться с друзьями
Вы находитесь тут:
На нашем сайте Вы можете получить решение задач и онлайн помощь
Подробнее
Воспользуемся
диаграммой энергомасс и вычислим
истинные угловые ускорения для положения
механизма, соответствующего максимальному
значению Мпр
(положение 7) по формуле:
εк=(Мпр/
)
– (
*d
/2*
*dφ),
где

=(
+Мс)*μм
– суммарный момент сил;
=
1847,5Нм.
=Jдоп
– BL*μJ7
– суммарный момент инерции;
=69,5
– 68*0,00164 = 69,38кгм2
d
/
dφ=tgβ7*μJ/μφ
β7
=
11°30;
tgβ7=0,2035,
εк=(1847,5/69,38)
– (44,742*0,2035*0,00164/2*69,38*0,1)=24,34с-2
Вывод:
кривошип вращается неравномерно, так
как на звенья механизма действуют
внешние переменные по величине силы.
3 Кинематика рычажного механизма
Кинематический
анализ механизма в определении линейных
и угловых скоростей, ускорений точек и
звеньев механизма по заданному закону
движения входного звена. Воспользуемся
методом планов.
3.1 Определение скоростей
Определим
скорость точки А по формуле:
VA=ω1*ƖOA,
ω1
=π*П1/30,
ω1
=3,14*428,57/30
= 44,89с-1,
VA=44,89*0,122=5,48м/с.
где
ω1
–
угловая скорость кривошипа.
Выберем
масштаб плана скоростей:
μγ
= VA/PVA,
где
PV
–
полюс плана скоростей;
PVA
–
отрезок на плане, изображающий скорость
точки А, PVА
=
78,5мм;
μγ
= 5,48/100=0,055м/с*мм
Скорость
точки И определим графическим решением
векторных уравнений:

где
VBA
и VBB0
– относительные скорости;
VBB0
– скорость точки B0.Точка
В0
– проекция точки В на точку VВ0=0.
Вектор
скорости VBA
– направлен перпендикулярно АВ,
VBB0
– параллельно направляющей ползуна
Построим
план скоростей и найдем:
VBA=PVBA*μV
VBA=
71*0,055 = 3,905 м/с,
VBB0=PVBB0*μV,
VBB0=66*0,4
= 26,4 м/с
Скорость
точки S2
Vs2=Pvs2*μV,
Vs2=
84*0,055 = 4,62м/с.
Угловую
скорость шатуна определим по формуле:
ω2=VBA/ƖAB
ω2=3,905/0,488
= 8,0с-1
Направление
угловой скорости шатуна находим по
направлению относительно скорости VBA.
Угловая
скорость шатуна направлена против
часовой стрелки.
3.2 Определение ускорений
Ускорение
точки А вычислим по формуле:
āА=ā0
+
+

где
āА
–
вектор ускорения точки А;
ā0
= 0 – ускорение точки О;
– нормальное
ускорение точки А относительно точки
О, направлено по радиусу к центру
вращения;
– тангенциальное
ускорение точки А относительно точки
), направлен по оси звена 1 от точки А к
точке О;
=
*
ƖОА
=44,892*0,122=245,84
м/с2
Выберем
масштаб плана ускорений:
μА=
/ПАО
tАО=
/
μА
где
ПАО
–
отрезок на плане, изображающий вектор
нормальногл ускорения. Примем ПАО=100мм;
tАО
–
отрезок на плане, изображающий вектор
тангенциального ускорения
РА
– полюс на плане ускорений.
μА=
245,84/100 = 2,46мс-2/мм,
Ускорение
точки В определен по векторным уравнениям:


=

*ƖВА,
=
8*8*0,488=31,232/с2,
ПВА=
/
μА,
ПВА=31,232/2,46=12,7мм,
где
– нормальное ускорение точки В
относительно точки А;

– тангенциальное
(касательное) ускорение точки В
относительно точки А;
находим
направление из плана скоростей

– ускорение
Кориолиса;

– релятивное
ускорение направлено параллельно
направляющей
=2(ω0*VBB),
=0,
так как ω0=0.
Построим
план и найдем линейные ускорения точек.
аВ=(Раb)*
μА,
аВ=aS3=82*2,46=201,72м/с2,
аВ=(ab)*
μА,
аВ=82*2,46=201,72м/с2,
=tBA*
μА,
=71*2,46=174,66м/с2,
аS2=(PаS2)*
μА,
аS2=89*2,46=218,94
м/с2.
Угловое
ускорение шатуна вычислим по формуле:
ε2=
/ƖАВ,
ε2=174,66/0,488=357,9с-2.
Угловое
ускорение шатуна направлено по часовой
стрелке.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
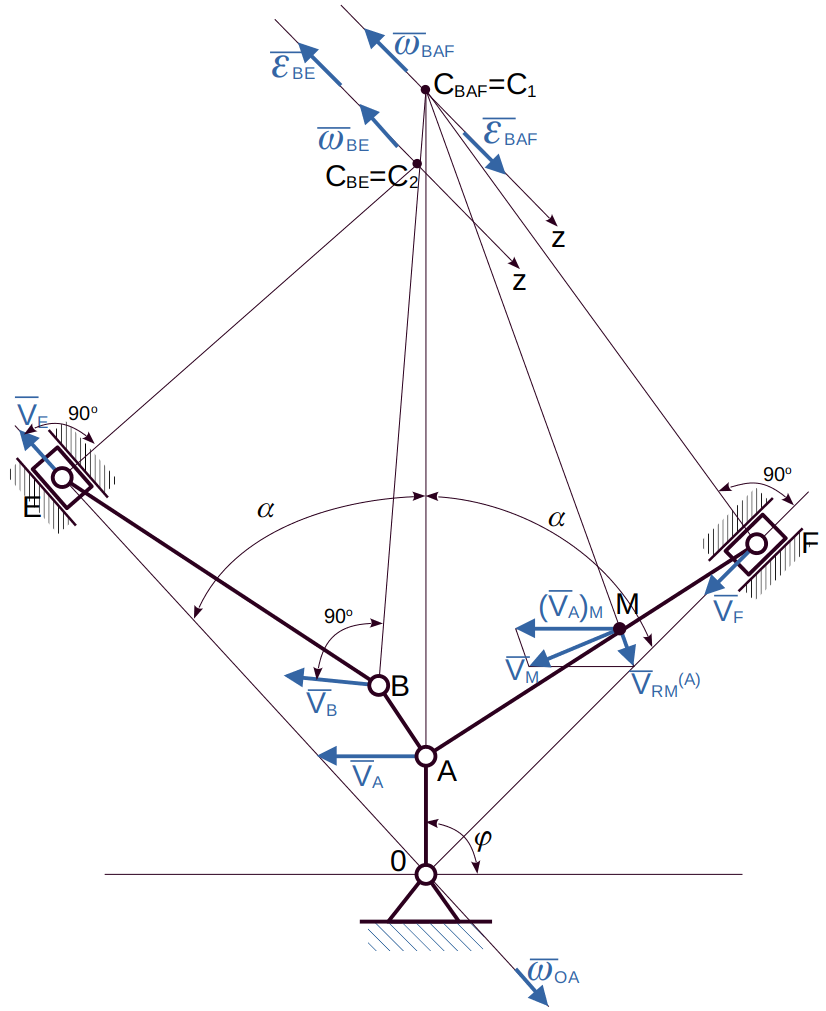
Рис.1
В положении механизма, указанном на рис.1, определить аналитически и построить на чертеже :
- положение мгновенных центров скоростей всех звеньев, совершающих плоское движение;
- скорости всех, точек механизма, расположенных в местах соединения звеньев (шарнирах);
- угловые скорости всех звеньев;
- ускорение точки А;
- ускорений других точек механизма методом полюса;
- угловые ускорения звеньев;
- касательное и нормальное ускорения точки В;
- установить характер движения точки В (ускоренное, замедленное, мгновенная остановка).
Дано:







 = 30 об./мин.
= 30 об./мин.
Определить:
1)  = ?
= ?
2)  = ?
= ?
3)  = ?
= ?
4)  = ?
= ?
Решение:
I. Определим скорости точек и угловые скорости звеньев механизма (метод мгновенного центра скоростей, мцс)
1.1 Определим угловую скорость ведущего кривошипа OA:

C1: вектор  оси
оси  — оси вращения кривошипа OA (см. рис.1),
— оси вращения кривошипа OA (см. рис.1), 
1.2 Рассмотрим кривошип OA:

C2:  в сторону вращения кривошипа OA (см. рис.1)
в сторону вращения кривошипа OA (см. рис.1)
1.3 рассмотрим уголковый шатун BAF
Точка  — мгновенный центр скоростей шатуна BAF
— мгновенный центр скоростей шатуна BAF
ось  — мгновенная ось вращения шатуна BAF.
— мгновенная ось вращения шатуна BAF.
(1) 
Примечание: Так как на Рис.1 звенья механизма изображены в масштабе, то величины (размеры) мгновенных радиусов точек, а именно:  и
и  берутся с рисунка.
берутся с рисунка.

C3: вектор скорости  по направляющей в сторону поворота шатуна (вниз).
по направляющей в сторону поворота шатуна (вниз).
Определим скорость точки B
Угловая скорость шатуна BAF:
(2) 
C4: Вектор  , т.к. шатун относительно оси поворачивается по часовой стрелке.
, т.к. шатун относительно оси поворачивается по часовой стрелке.
(3) 
Примечание: Величина  так-же берётся с Рис.1.
так-же берётся с Рис.1.
Из (3) получаем

C5: вектор  и направлен в сторону вращения шатуна BAF.
и направлен в сторону вращения шатуна BAF.
1.4 Рассмотрим шатун «BE»
Точка  — мгновенный центр скоростей шатуна «BE»
— мгновенный центр скоростей шатуна «BE»
Ось  — мгновенная ось вращения шатуна «BE»
— мгновенная ось вращения шатуна «BE»
(4) 
Из (4) получаем:

C6: Вектор  и направлен по направляющей вверх (см. Рис.1).
и направлен по направляющей вверх (см. Рис.1).
Угловая скорость шатуна BE:
(5) 
Примечание: Величину  берём из рис. 1 с учётом масштаба.
берём из рис. 1 с учётом масштаба.
C7: вектор угловой скорости шатуна BE  (от нас),
(от нас),
т.к. «отсюда» видим вращение по часовой стрелке относительно оси
1.5 Определим скорость точки M:
а) метод «мгновенного центра скоростей»:
Точка M  шатуну BAF, точка
шатуну BAF, точка  — мгновенный центр скоростей BAF,
— мгновенный центр скоростей BAF,  — мгновенный радиус точки M.
— мгновенный радиус точки M.
(6) 
Из (6) получаем:

C8: Вектор скорости  и направлен в сторону вращения шатуна BAF
и направлен в сторону вращения шатуна BAF
б) метод «полюса»: точка А — полюс
(7) 
Где  — вращательная скорость точки M относительно «полюса» A, вектор направлен перпендикулярно
— вращательная скорость точки M относительно «полюса» A, вектор направлен перпендикулярно 




 = 0.342 (величина угла взята с рис.1)
= 0.342 (величина угла взята с рис.1)
Сравним  = 0.68 m/c (мцс) и «метод полюса» = 0.73 m/c : погрешность расчёта составляет
= 0.68 m/c (мцс) и «метод полюса» = 0.73 m/c : погрешность расчёта составляет

II. Определение ускорений точек и угловых ускорений звеньев механизма. (методом «полюса»)
2.1 Ускорение точки A, принадлежащей кривошипу OA, который вращается вокруг неподвижной оси 
(8) 
(9) 
где  и
и  — вращательное и осестремительное ускорения точки A около оси соответственно.
— вращательное и осестремительное ускорения точки A около оси соответственно.
(10) 

С учётом (9) и (10) из (8) получим:
(11) 
(12) 
тогда их (11) с учётом (12) получим

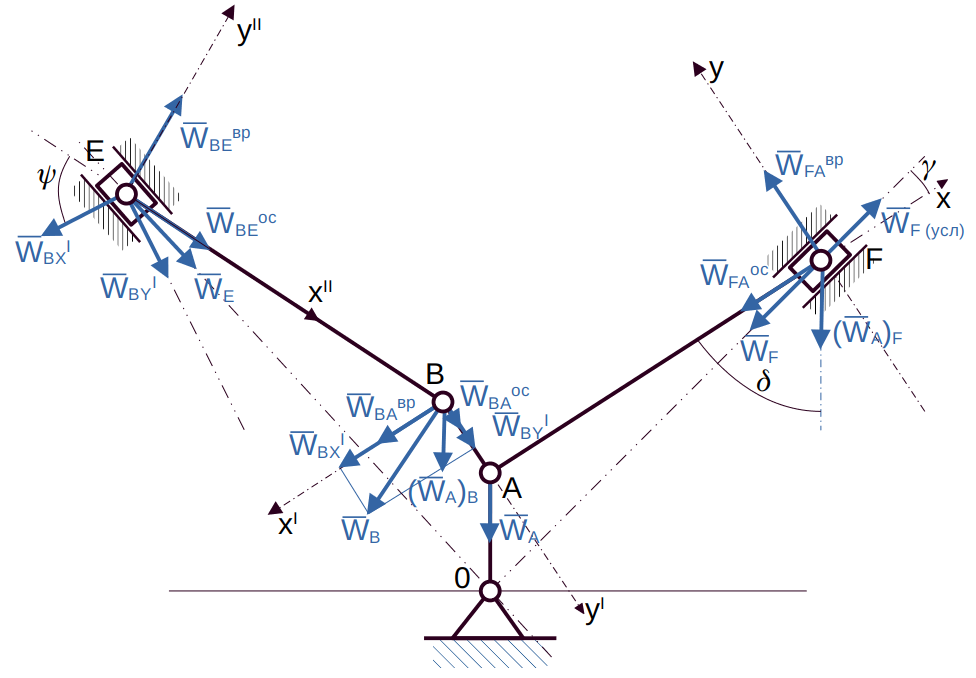
Рис.2
C9:  направлен из точки A к оси (см.рис.2).
направлен из точки A к оси (см.рис.2).
2.2 Рассмотрим шатун BAF
а) определяем ускорение точки F
(13) 
где  и
и  — вращательное и осестремительное ускорения точки F вокруг «полюса» A, соответственно.
— вращательное и осестремительное ускорения точки F вокруг «полюса» A, соответственно.
(14) 
C10: Вектор осестремительного ускорения направлен от точки F к «полюсу» A (см.рис.2)
C11: Для вектора вращательного ускорения известна только линия действия (л.д.),  (направление также выбираем условно см.рис.2)
(направление также выбираем условно см.рис.2)
C12: Для вектора  — (ускорения «ползуна» F) известна только линия действия (л.д.) — направляющая «OF» (направление также выберем условно)
— (ускорения «ползуна» F) известна только линия действия (л.д.) — направляющая «OF» (направление также выберем условно)

(15) 
Спроектируем векторное равенство (13) на оси координат «XFY»:
на ось  :
:
(16) 
на ось  :
:
(17) 
C13:  (см.рис.2)
(см.рис.2)

 , где величину этих углов берём с чертежа (см.рис.2)
, где величину этих углов берём с чертежа (см.рис.2)
Далее перепишем (16) и (17), подставляя числовые значения:
(18) 
(19) 
Из уравнения (16) получим:

C14: Получили, что  , следовательно, условное направление надо поменять на противоположное (см.рис.2)
, следовательно, условное направление надо поменять на противоположное (см.рис.2)
Из уравнения (17) получим:

C15: Так как  , то условное направление верно! (см.рис.2).
, то условное направление верно! (см.рис.2).
Определим угловое ускорение шатуна BAF:
(20) 
Направление  определяем из векторного произведения
определяем из векторного произведения
 (см.рис.2)
(см.рис.2)
C16: Вектор  и, так как
и, так как  , то шатун «BAF» вращается замедленно ! (см.рис.1)
, то шатун «BAF» вращается замедленно ! (см.рис.1)
б) Определим ускорение точки  (метод «полюса»):
(метод «полюса»):
(21) 

где  (см. пункт I.)
(см. пункт I.)
C17: Вектор  направлен по
направлен по  от точки B к «полюсу» A (см.рис.2).
от точки B к «полюсу» A (см.рис.2).
С учётом (20) получим, что:

(22) 
C18: Вектор  (см.рис.2).
(см.рис.2).
Спроектируем векторное равенство (21) на оси  :
:
на ось 
(23) 
на ось 
(24) 

угол  берём с чертежа (см.рис.2).
берём с чертежа (см.рис.2).
Перепишем (23) и (24), подставляя числовые значения:
(25) 
(26) 
Далее находим абсолютную величину ускорения точки B:
(27) 
Направление вектора  определяется направляющими косинусами по отношению к осям BXY.
определяется направляющими косинусами по отношению к осям BXY.
(28) 
Соотношение (27) и (28) представляют вектор по величине (27) и направлению (28)
2.3 Рассмотрим шатун «BE»
Запишем для  — вектора ускорения точки
— вектора ускорения точки  шатуну «BE» (по методу «полюса») векторное равенство:
шатуну «BE» (по методу «полюса») векторное равенство:
(29) 
Спроецируем (29) на оси координат  и
и  (см. рис.2)
(см. рис.2)
(30) 
(31) 

Далее перепишем (30) и (31), подставляя числовые значения, получим
(32) 
(33) 
Здесь также значение угла  берём с чертежа (см.рис.2)
берём с чертежа (см.рис.2)

Из (32) определим величину вектора ускорения точки E

Из (33) определим величину вектора вращательного ускорения точки «E» около «полюса» B:

(34) 
Определим величину углового ускорения шатуна BE с учётом (34)

Направление вектора  определим из векторного произведения:
определим из векторного произведения:
(35) 
C19: Так как получили (34), что  , то следует условное направление вектора изменить на противоположное (рис.2), тогда чтобы удовлетворить векторное произведение (35), вектор
, то следует условное направление вектора изменить на противоположное (рис.2), тогда чтобы удовлетворить векторное произведение (35), вектор  (см. рис.1), а поскольку получили, что
(см. рис.1), а поскольку получили, что  , то, значит, характер вращения шатуна «BE» — ускоренный.
, то, значит, характер вращения шатуна «BE» — ускоренный.
Ответ:

Содержание:
Мгновенный центр ускорений:
В каждый момент движения плоской фигуры в своей плоскости, если  Эту точку называют мгновенным центром ускорений. Обозначим ее через
Эту точку называют мгновенным центром ускорений. Обозначим ее через  . Для доказательства этой теоремы предположим, что известны по модулю и направлению ускорение какой-либо точки плоской фигуры, угловая скорость и угловое ускорение этой фигуры. Пусть
. Для доказательства этой теоремы предположим, что известны по модулю и направлению ускорение какой-либо точки плоской фигуры, угловая скорость и угловое ускорение этой фигуры. Пусть  (рис. 56). Мгновенный центр ускорений лежит на линии, проведенной под углом
(рис. 56). Мгновенный центр ускорений лежит на линии, проведенной под углом  к ускорению точки, тангенс которого вычисляем по формуле
к ускорению точки, тангенс которого вычисляем по формуле
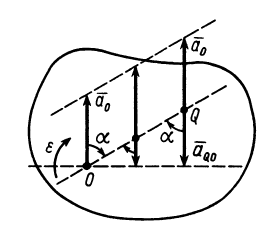
Рис. 56
При этом угол надо отложить от ускорения  в направлении дуговой стрелки углового ускорения
в направлении дуговой стрелки углового ускорения  , т. е. в рассматриваемом случае по часовой стрелке. Только в точках этой прямой ускорение
, т. е. в рассматриваемом случае по часовой стрелке. Только в точках этой прямой ускорение  и ускорение от вращения
и ускорение от вращения  могут иметь противоположные направления и одинаковые значения, т. е.
могут иметь противоположные направления и одинаковые значения, т. е.
и тогда
Но

следовательно,

Из приведенного доказательства следует, что мгновенный центр ускорений является единственной точкой плоской фигуры, ускорение которой в рассматриваемый момент времени равно нулю. В другой момент времени мгновенный центр ускорений находится в общем случае в другой точке плоской фигуры.
Если мгновенный центр ускорений известен, то, выбрав его за полюс, для ускорения точки  плоской фигуры по формуле (10) получаем
плоской фигуры по формуле (10) получаем

так как
и, следовательно,

Ускорение  направлено под углом
направлено под углом  к отрезку
к отрезку  , соединяющему точку с мгновенным центром ускорений в сторону дуговой стрелки углового ускорения
, соединяющему точку с мгновенным центром ускорений в сторону дуговой стрелки углового ускорения  (рис. 57).
(рис. 57).
Для точки  , аналогично,
, аналогично,

и ускорение  также направлено под углом
также направлено под углом  к отрезку
к отрезку  .
.
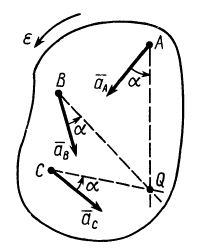
Рис. 57
Из формул (16) и (17) имеем

т. е. ускорения точек плоской фигуры при плоском движении пропорциональны расстояниям от этих точек до мгновенного центра ускорений.
Итак, суммируя результаты, получаем, что ускорения точек плоской фигуры при плоском движении можно определить так же, как и при вращательном движении плоской фигуры вокруг мгновенного центра ускорений с угловой скоростью  и угловым ускорением
и угловым ускорением  .
.
Для вычисления скоростей точек плоской фигуры при плоском движении принимают, что плоская фигура вращается вокруг мгновенного центра скоростей, а для вычисления ускорения следует считать, что она вращается вокруг мгновенного центра ускорений.
При качении без скольжения колеса по прямой (см. пример в § 7) получается, что ускорение мгновенного центра скоростей не равно нулю; следовательно, в общем случае мгновенные центры скоростей и ускорений являются различными точками плоской фигуры.
Ускорения точек плоской фигуры при плоском движении, подобно скоростям точек, можно определять двумя способами: по формуле (10), выражающей зависимость ускорений двух точек плоской фигуры, и по формуле (16), используя мгновенный центр ускорений. Обычно мгновенный центр ускорений, кроме частных случаев, когда угловая скорость или угловое ускорение равны нулю, располагается на плоской фигуре так, что трудно определить расстояние от него до рассматриваемых точек фигуры. Поэтому определение ускорения точек рекомендуется вычислять по формуле (10).
Рассмотрим способы нахождения мгновенного центра ускорений как в частных, так и в общем случаях.
1. Пусть известно, что угловое ускорение  , а угловая скорость
, а угловая скорость  . Очевидно, это возможно в случае, когда плоская фигура вращается в своей плоскости с постоянной угловой скоростью или когда угловая скорость достигает относительно наибольшего или наименьшего значения. В этом случае для угла
. Очевидно, это возможно в случае, когда плоская фигура вращается в своей плоскости с постоянной угловой скоростью или когда угловая скорость достигает относительно наибольшего или наименьшего значения. В этом случае для угла 
и, следовательно, угол  .
.
Мгновенный центр ускорений лежит на прямой линии, по которой направлено ускорение какой-либо точки плоской фигуры (рис. 58). Так как это справедливо для любой точки фигуры, то, следовательно, мгновенный центр ускорений лежит в точке пересечения прямых линий, по которым направлены ускорения точек плоской фигуры. Ускорения точек плоской фигуры в этом случае направлены к мгновенному центру ускорений, так как они состоят только из одной относительной нормальной составляющей от вращения вокруг мгновенного центра ускорений.
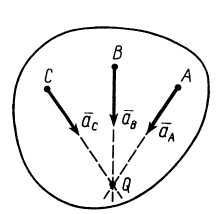
Рис. 58
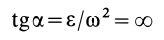
Если известно ускорение, например точки  , то мгновенный центр ускорений можно найти по расстоянию
, то мгновенный центр ускорений можно найти по расстоянию  :
:
Эта формула получается из (16) в том случае, когда угловое ускорение равно нулю.
2. Пусть угловая скорость  , а угловое ускорение
, а угловое ускорение  . Это возможно при мгновенном поступательном движении.
. Это возможно при мгновенном поступательном движении.
Тогда
и, следовательно, угол  — прямой. Его надо откладывать от ускорения точки в направлении дуговой стрелки углового ускорения. Мгновенный центр ускорений лежит на пересечении перпендикуляров к ускорениям точек плоской фигуры, проведенных из этих точек (рис. 59). Если известно числовое значение ускорения какой-либо точки
— прямой. Его надо откладывать от ускорения точки в направлении дуговой стрелки углового ускорения. Мгновенный центр ускорений лежит на пересечении перпендикуляров к ускорениям точек плоской фигуры, проведенных из этих точек (рис. 59). Если известно числовое значение ускорения какой-либо точки  , то расстояние от до мгновенного центра ускорений можно вычислить по формуле
, то расстояние от до мгновенного центра ускорений можно вычислить по формуле  , которая получается из формулы (16) при .
, которая получается из формулы (16) при .
3. В общем случае, когда угловая скорость  и угловое ускорение
и угловое ускорение  известны и не равны нулю, для угла имеем
известны и не равны нулю, для угла имеем
Мгновенный центр ускорений лежит на пересечении прямых линий, проведенных к ускорениям точек фигуры под одним и тем же углом  , причем угол а нужно откладывать от ускорений точек в направлении дуговой стрелки углового ускорения независимо от направления угловой скорости плоской фигуры (см. рис. 57). Если известно ускорение, например точки
, причем угол а нужно откладывать от ускорений точек в направлении дуговой стрелки углового ускорения независимо от направления угловой скорости плоской фигуры (см. рис. 57). Если известно ускорение, например точки  , то расстояние от точки
, то расстояние от точки  до мгновенного центра ускорений можно найти по формуле (16), т. е.
до мгновенного центра ускорений можно найти по формуле (16), т. е.
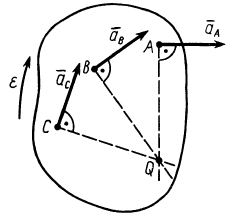
Рис. 59
4. Пусть в данный момент времени известны ускорения двух точек плоской фигуры:  и
и  (рис. 60). Укажем способ нахождения мгновенного центра ускорений в этом случае. По формулам (10)… (13), приняв за полюс точку
(рис. 60). Укажем способ нахождения мгновенного центра ускорений в этом случае. По формулам (10)… (13), приняв за полюс точку  , имеем
, имеем

где

Проецируя левую и правую части векторной формулы (19) на две взаимно перпендикулярные оси  и
и  , получаем
, получаем

где  и
и  — известные углы соответственно между ускорениями
— известные углы соответственно между ускорениями  и
и  и положительным направлением оси
и положительным направлением оси  .
.
При принятом направлении оси  проекцию
проекцию  на эту ось надо взять со знаком плюс, так как
на эту ось надо взять со знаком плюс, так как  направлена всегда от точки к полюсу
направлена всегда от точки к полюсу  . Проекцию ускорения
. Проекцию ускорения  на ось предположительно возьмем с плюсом, считая дуговую стрелку
на ось предположительно возьмем с плюсом, считая дуговую стрелку  в рассматриваемом случае направленной против часовой стрелки. Определяя
в рассматриваемом случае направленной против часовой стрелки. Определяя  и , легко находим
и , легко находим

Естественно, что в реальных случаях величина , найденная из полученной формулы, должна оказаться положительной. Знак же углового ускорения определяется знаком правой части формулы для .
После того как найдены и , задача нахождения мгновенного центра ускорений сводится к уже рассмотренному случаю 3.
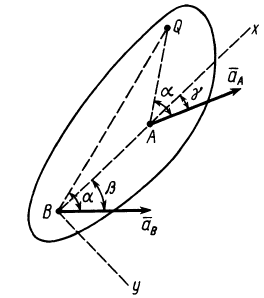
Рис. 60
Основные способы вычисления углового ускорения при плоском движении
При вычислении ускорений точек фигуры при плоском движении необходимо знать угловое ускорение. Рассмотрим некоторые приемы его определения.
1. Если известен угол поворота или угловая скорость в зависимости от времени, то угловое ускорение е определяем путем дифференцирования их по времени, т. е.

2. Обычно требуется определить угловое ускорение в какой-либо момент времени по другим величинам, известным в этот же момент времени. В этом случае угловое ускорение тоже можно получить путем дифференцирования угловой скорости по времени, считая ее для вывода формулы известной функцией времени. Угловую скорость можно найти по формуле (7):
где  — точка плоской фигуры;
— точка плоской фигуры;  — мгновенный центр скоростей.
— мгновенный центр скоростей.
Дифференцируя  по времени, получаем
по времени, получаем
В тех случаях, когда  постоянно,
постоянно,

так как

где  — касательное ускорение точки
— касательное ускорение точки  .
.
Так, например, при качении колеса без скольжения по неподвижной прямой линии (см. рис. 55), если за точку  взять центр колеса
взять центр колеса  , то, учитывая, что он движется прямолинейно, получим
, то, учитывая, что он движется прямолинейно, получим
так как в этом случае

где  — радиус колеса.
— радиус колеса.
При качении без скольжения одного колеса по неподвижному другому колесу сначала установим зависимость между угловой скоростью  подвижного колеса и угловой скоростью со кривошипа
подвижного колеса и угловой скоростью со кривошипа  (рис. 61). Учитывая, что мгновенный центр скоростей подвижного колеса лежит в точке соприкосновения колес, получаем
(рис. 61). Учитывая, что мгновенный центр скоростей подвижного колеса лежит в точке соприкосновения колес, получаем

где  — радиус неподвижного колеса;
— радиус неподвижного колеса;  — радиус подвижного колеса.
— радиус подвижного колеса.
Дифференцируя по времени (21), имеем

так как

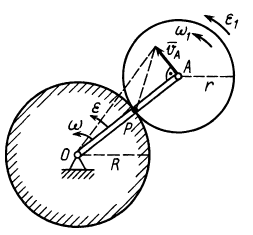
Рис. 61
Из сравнения (21) и (22) видно, что связь между угловыми скоростями и угловыми ускорениями колес полностью аналогична. Это справедливо и для углов поворота колес, если нулевые их значения выбрать в один и тот же момент времени.
При внешнем зацеплении дуговые стрелки угловой скорости и углового ускорения подвижного колеса совпадают с дуговыми стрелками соответственно угловой скорости и углового ускорения кривошипа .
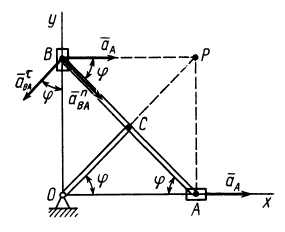
Рис. 62
При внутреннем зацеплении колес дуговые стрелки  и
и  колеса и кривошипа имеют противоположные направления.
колеса и кривошипа имеют противоположные направления.
3. Иногда угловое ускорение  можно найти путем проецирования на оси координат известного по направлению ускорения, например точки
можно найти путем проецирования на оси координат известного по направлению ускорения, например точки  , если ускорение какой-либо другой точки
, если ускорение какой-либо другой точки  и угловая скорость фигуры
и угловая скорость фигуры  известны или их можно вычислить предварительно.
известны или их можно вычислить предварительно.
Так, если ускорение точки 

то, проецируя обе части (23) на ось  , перпендикулярную ускорению
, перпендикулярную ускорению  , получаем соотношение, из которого можно определить угловое ускорение, если другие величины, входящие в это соотношение, известны.
, получаем соотношение, из которого можно определить угловое ускорение, если другие величины, входящие в это соотношение, известны.
Определим этим способом угловое ускорение линейки эллипсографа  (рис. 62). Эллипсографом называют механизм, в котором одна точка
(рис. 62). Эллипсографом называют механизм, в котором одна точка  его линейки движется только по оси , а другая — по оси
его линейки движется только по оси , а другая — по оси  . Линейка эллипсографа обычно приводится в движение вращением кривошипа
. Линейка эллипсографа обычно приводится в движение вращением кривошипа  вокруг оси
вокруг оси  , причем точка
, причем точка  лежит на середине линейки и описывает окружность с центром в точке
лежит на середине линейки и описывает окружность с центром в точке  , а точки части линейки
, а точки части линейки  описывают всевозможные эллипсы, заключенные между окружностью и прямой
описывают всевозможные эллипсы, заключенные между окружностью и прямой  . Точки части линейки
. Точки части линейки  соответственно могут описать набор эллипсов, заключенных между окружностью и прямой
соответственно могут описать набор эллипсов, заключенных между окружностью и прямой  .
.
В эллипсографе, когда ускорения точек  и
и  направлены соответственно по осям
направлены соответственно по осям  и
и  , проецируя (23) на
, проецируя (23) на  , получаем
, получаем

так как

Соотношение (24) и служит для определения углового ускорения линейки эллипсографа  , если все другие величины в этом соотношении известны или их можно предварительно определить.
, если все другие величины в этом соотношении известны или их можно предварительно определить.
Описанным выше приемом удобно определять угловое ускорение шатунов в различных кривошипно-шатунных механизмах, когда у шатуна есть точка, движущаяся прямолинейно.
Если известны ускорения двух точек и плоской фигуры по модулю и направлению в какой-либо момент времени, то путем проецирования соотношения (23) на два взаимно перпендикулярных направления, одно из которых удобно направить по , получим два уравнения для определения угловой скорости и углового ускорения (см. п. 4 § 8).
Наоборот, по угловой скорости и угловому ускорению из этих уравнений можно найти числовые значения ускорений точек и , если известны направления ускорений этих точек.
4. В задачах (см. § 6, рис. 53), где зависимость между угловыми скоростями различных тел можно установить путем дифференцирования по времени тождественных соотношений между углами поворота, зависимость между угловыми ускорениями часто можно получить путем двукратного дифференцирования по времени этих тождеств. Так, после первого дифференцирования в рассматриваемом случае

Дифференцируя вторично, имеем

Так как  — угловое ускорение шатуна и
— угловое ускорение шатуна и  — угловое ускорение кривошипа
— угловое ускорение кривошипа  , то
, то

Если дополнительно известно, что угловая скорость  кривошипа постоянна, т. е.
кривошипа постоянна, т. е.  , то
, то

Отсюда можно определить угловое ускорение шатуна в зависимости от углов  и
и  и угловых скоростей
и угловых скоростей  и
и  .
.
Пример:
Диск радиусом  приводится в движение от кривошипа
приводится в движение от кривошипа  и вертикальной рейки (рис. 63). От кривошипа движение диску передается при помощи шатуна
и вертикальной рейки (рис. 63). От кривошипа движение диску передается при помощи шатуна  . Рейка движется поступательно по закону
. Рейка движется поступательно по закону  ; кривошип вращается согласно уравнению
; кривошип вращается согласно уравнению  . Угол
. Угол  отсчитывается от горизонтального направления.
отсчитывается от горизонтального направления.
Определить угловые скорость и ускорение диска и шатуна, а также скорости и ускорения точек  ,
,  ,
,  , мгновенные центры скоростей и ускорений диска в момент времени
, мгновенные центры скоростей и ускорений диска в момент времени  , если
, если  и точки
и точки  диска и
диска и  кривошипа расположены на одной горизонтальной прямой.
кривошипа расположены на одной горизонтальной прямой.
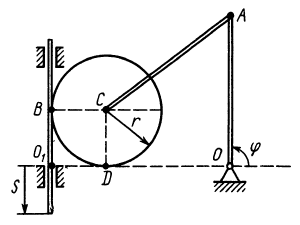
Рис. 63
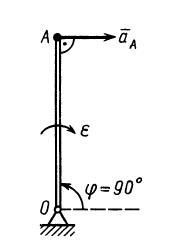
Рис. 64
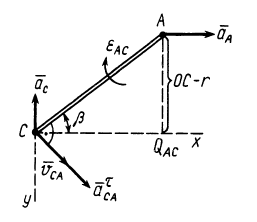
Рис. 65
Решение. Положение кривошипа в момент времени  определяется
определяется  . Кривошип в этот момент занимает вертикальное положение, параллельное рейке.
. Кривошип в этот момент занимает вертикальное положение, параллельное рейке.
Для алгебраических угловой скорости и углового ускорения кривошипа имеем
При  . Таким образом угловые скорость и ускорение кривошипа
. Таким образом угловые скорость и ускорение кривошипа  . Дуговую стрелку для
. Дуговую стрелку для  следует направить против положительного направления угла
следует направить против положительного направления угла  , так как
, так как  .
.
Для скорости и ускорения точки  кривошипа, вращающегося вокруг неподвижной оси, имеем:
кривошипа, вращающегося вокруг неподвижной оси, имеем:

Ускорение  изображено на рис.64 с учетом дуговой стрелки для
изображено на рис.64 с учетом дуговой стрелки для  .
.
У точки  шатуна такие же скорость и ускорение, как и у точки
шатуна такие же скорость и ускорение, как и у точки  кривошипа. Приняв точку
кривошипа. Приняв точку  за полюс (рис. 65), определяем скорость точки
за полюс (рис. 65), определяем скорость точки  шатуна по формуле
шатуна по формуле

Но  ; следовательно,
; следовательно,  , причем
, причем  перпендикулярна
перпендикулярна  . В проекциях на выбранные оси координат из (а) получаем
. В проекциях на выбранные оси координат из (а) получаем

Траекторией точки  является вертикальная прямая. Поэтому
является вертикальная прямая. Поэтому  ,
,  . С учетом этого из (а’) имеем, что
. С учетом этого из (а’) имеем, что  и угловая скорость шатуна
и угловая скорость шатуна  .
.
Вычисляем скорость и ускорение точки  рейки по формулам
рейки по формулам  ,
,  . При
. При  ,
,  . Производные
. Производные  и
и  положительны, поэтому
положительны, поэтому  и
и  следует направить в сторону возрастания
следует направить в сторону возрастания  .
.
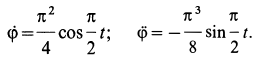
При отсутствии скольжения у точки  диска будут такие же скорость и составляющая ускорения в вертикальном направлении
диска будут такие же скорость и составляющая ускорения в вертикальном направлении  , как и у точки
, как и у точки  рейки (рис. 66).
рейки (рис. 66).
Приняв за полюс точку  диска, определяем скорость его точки
диска, определяем скорость его точки  по формуле
по формуле

Рис. 66
Предположив, что диск вращается против часовой стрелки, строим треугольник скоростей для точки  в соответствии с (б). Он выродился в отрезок прямой (рис. 66).
в соответствии с (б). Он выродился в отрезок прямой (рис. 66).
В проекциях на оси координат из (б) имеем  ,
,  . Но
. Но  ; следовательно,
; следовательно,  и
и  . Скорость
. Скорость  получилась положительной; следовательно, предположение о направлении вращения диска подтвердилось. Угловую скорость диска определяем по формуле
получилась положительной; следовательно, предположение о направлении вращения диска подтвердилось. Угловую скорость диска определяем по формуле

Мгновенным центром скоростей диска является его точка , так как  . Используя эту точку как
. Используя эту точку как  , для точки
, для точки  имеем
имеем

Перейдем к определению ускорений точек и углового ускорения диска  . Приняв за полюс точку
. Приняв за полюс точку  шатуна, ускорение его точки определим по формуле
шатуна, ускорение его точки определим по формуле

где  ,
,  и
и  перпендикулярно
перпендикулярно  . На основании (в) строим многоугольник ускорений для точки (рис. 67, а), предполагая, что
. На основании (в) строим многоугольник ускорений для точки (рис. 67, а), предполагая, что  направлено против часовой стрелки.
направлено против часовой стрелки.
В проекциях на оси координат из (в) (см. рис. 65 и 67, а) имеем

Ускорение точки направлено параллельно оси  вследствие ее прямолинейного движения в этом направлении. Следовательно,
вследствие ее прямолинейного движения в этом направлении. Следовательно,  ,
,  ,
,  ,
,  так как
так как

Так как  получили со знаком минус, то направление для дуговой стрелки
получили со знаком минус, то направление для дуговой стрелки  противоположно предположенному (см. рис. 65).
противоположно предположенному (см. рис. 65).
Угловое ускорение шатуна . Ускорение
. Ускорение  направлено вверх, т.е.
направлено вверх, т.е.  отрицательно, и
отрицательно, и  . Для определения углового ускорения диска
. Для определения углового ускорения диска  вычислим ускорение точки , приняв за полюс точку
вычислим ускорение точки , приняв за полюс точку  . Имеем
. Имеем

где
В соответствии с (г) строим многоугольник ускорений для точки , приняв  направленным против часовой стрелки (рис. 67, б).
направленным против часовой стрелки (рис. 67, б).
В проекциях на выбранные оси координат из (г) с учетом рис. 67, б получаем

Но

С учетом полученных значений из (г’) имеем:

и

Ускорение  получилось положительным, что подтверждает правильность выбора направления для
получилось положительным, что подтверждает правильность выбора направления для  . Угловое ускорение диска
. Угловое ускорение диска

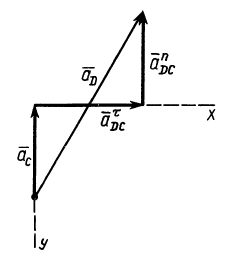
Рис. 68
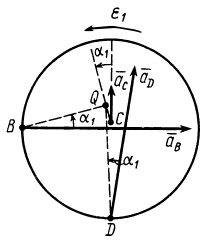
Рис. 69
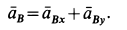
Приняв за полюс точку , для ускорения точки  получим
получим

где

На рис. 68 приведен многоугольник ускорений для точки . В проекциях на оси координат из (д) имеем

Определим ускорение точки :
Для определения мгновенного центра ускорений  диска вычисляем
диска вычисляем

Угол  откладываем от ускорения
откладываем от ускорения  в направлении дуговой стрелки
в направлении дуговой стрелки  . На линии, проходящей через точку под углом находится точка . Расстояние до нее от точки определяем по формуле
. На линии, проходящей через точку под углом находится точка . Расстояние до нее от точки определяем по формуле

Точка находится вблизи точки . На рис. 69 указаны в примерном масштабе значения ускорений точек диска и положение . Ускорения  и
и  тоже образуют такие же углы
тоже образуют такие же углы  с отрезками прямых, соединяющих эти точки с точкой .
с отрезками прямых, соединяющих эти точки с точкой .
Мгновенный центр ускорений шатуна  находится в точке
находится в точке  (см. рис. 65), так как для шатуна
(см. рис. 65), так как для шатуна

- Заказать решение задач по теоретической механике
Теорема о конечном перемещении плоской фигуры
Понятие мгновенного центра скоростей плоской фигуры при плоском движении можно ввести используя теорему о конечном перемещении плоской фигуры. Фигуру в ее плоскости из заданного положения I в любое другое положение II (рис. 70) можно перевести одним поворотом в этой плоскости вокруг точки  , называемой центром конечного вращения.
, называемой центром конечного вращения.
Пусть в положении I плоская фигура характеризуется отрезком  , скрепленным с фигурой, а в положении II этот отрезок займет положение
, скрепленным с фигурой, а в положении II этот отрезок займет положение  .
.
Рис. 70
Рассмотрим случай, когда и не параллельны. Можно доказать, что центр конечного вращения  находится на пересечении перпендикуляров
находится на пересечении перпендикуляров  и
и  , восставленных из середин отрезков
, восставленных из середин отрезков  и
и  . Для этого докажем, что заштрихованные треугольники
. Для этого докажем, что заштрихованные треугольники  и
и  равны по трем сторонам;
равны по трем сторонам;  как гипотенузы в равных прямоугольных треугольниках
как гипотенузы в равных прямоугольных треугольниках  и
и  , так как по построению точка
, так как по построению точка  есть середина отрезка
есть середина отрезка  , a
, a  — общий катет треугольников. Аналогично, рассматривая равные треугольники
— общий катет треугольников. Аналогично, рассматривая равные треугольники  и
и  , получаем
, получаем  ;
;  — по условию.
— по условию.
Для перевода плоской фигуры из положения I в положение II достаточно совместить между собой равные треугольники и . Это можно осуществить одним поворотом треугольника в его плоскости вокруг вершины  . При этом если сторону
. При этом если сторону  до совмещения со стороной
до совмещения со стороной  повернуть на угол
повернуть на угол  , то сторону
, то сторону  до совмещения со стороной
до совмещения со стороной  следует повернуть на угол
следует повернуть на угол  , равный углу ф, так как углы
, равный углу ф, так как углы  и
и  состоят из общего для них угла
состоят из общего для них угла  и одинаковых углов
и одинаковых углов  , лежащих в равных заштрихованных треугольниках против равных сторон.
, лежащих в равных заштрихованных треугольниках против равных сторон.
Итак, если отрезок  повернуть вокруг на угол , то отрезок при этом повернется на тот же угол и в том же направлении, что и отрезок
повернуть вокруг на угол , то отрезок при этом повернется на тот же угол и в том же направлении, что и отрезок  , и, следовательно, точка
, и, следовательно, точка  совпадает с точкой
совпадает с точкой  , а точка
, а точка  —с точкой
—с точкой  , т. е. отрезок
, т. е. отрезок  совпадет всеми своими точками с отрезком .
совпадет всеми своими точками с отрезком .
В том случае, когда отрезок  параллелен отрезку , перпендикуляры
параллелен отрезку , перпендикуляры  к и
к и  к параллельны и, следовательно, пересекаются в бесконечности. В этом случае
к параллельны и, следовательно, пересекаются в бесконечности. В этом случае  следует считать находящимся в бесконечности и плоскую фигуру из положения I в положение II можно перевести поступательным перемещением, что соответствует повороту фигуры вокруг бесконечно удаленной точки.
следует считать находящимся в бесконечности и плоскую фигуру из положения I в положение II можно перевести поступательным перемещением, что соответствует повороту фигуры вокруг бесконечно удаленной точки.
- Мгновенный центр вращения
- Вращение твердого тела вокруг неподвижной точки
- Сложное движение точки
- Сложение движение твердого тела
- Центр тяжести
- Кинематика точки
- Плоское движение твердого тела
- Мгновенный центр скоростей
