§ 12.
Уравнения равномерного прямолинейного
движения
1. Уравнение в
векторной форме.
Знаем,
что одна из основных задач механики
заключается в нахождении положения
точки в любой момент времени при
движении. Знаем, что положение точки
может быть определено радиус-вектором,
и в любом движении конечный радиус-вектор
имеет вид:
![]() .
.
![]()
– задан, а ![]()
наиболее просто находить в равномерном
прямолинейном движении с помощью
скорости и времени.

Имеем:
![]()
– это и есть уравнение равномерного
прямолинейного движения в векторной
форме.
2. Уравнение в
координатной форме.
Знаем,
что векторы находят с помощью проекций
на оси координат. Поэтому от векторного
уравнения движения перейдём к
проекциям векторных величин на оси
координат.
Если ![]() ,
,
то:
.
Проекции радиусов равны
соответствующим координатам. Поэтому:
.
Если
траектория известна, то мы совмещаем
траекторию с осью координат OX и
пользуемся вместо трёх всего одним
первым уравнением.
Уравнение механического движения в векторной форме
§ 12. Уравнения равномерного прямолинейного движения
1. Уравнение в векторной форме.
Знаем, что одна из основных задач механики заключается в нахождении положения точки в любой момент времени при движении. Знаем, что положение точки может быть определено радиус-вектором, и в любом движении конечный радиус-вектор имеет вид:
.
– задан, а наиболее просто находить в равномерном прямолинейном движении с помощью скорости и времени.
– это и есть уравнение равномерного прямолинейного движения в векторной форме.
2. Уравнение в координатной форме.
Знаем, что векторы находят с помощью проекций на оси координат. Поэтому от векторного уравнения движения перейдём к проекциям векторных величин на оси координат.
Если , то:
.
Проекции радиусов равны соответствующим координатам. Поэтому:
.
Если траектория известна, то мы совмещаем траекторию с осью координат OX и пользуемся вместо трёх всего одним первым уравнением.
Никакую часть этого материала ни в каких целях, включая образовательные и научные, нельзя без письменного разрешения владельца авторских прав дублировать в сети Интернет и воспроизводить в какой бы то ни было форме и какими бы то ни было средствами, будь то электронные или механические, включая запись на магнитный или электронный носитель, вывод на печать, фотокопирование.
Механическое движение
О чем эта статья:
Механическое движение
Когда мы идем в школу или на работу, автобус подъезжает к остановке или сладкий корги гуляет с хозяином, мы имеем дело с механическим движением.
Механическим движением называется изменение положения тел в пространстве относительно других тел с течением времени.
«Относительно других тел» — очень важные слова в этом определении. Для описания движения нам нужны:
- тело отсчета
- система координат
- часы
В совокупности эти три параметра образуют систему отсчета.
В механике есть такой раздел — кинематика. Он отвечает на вопрос, как движется тело. Дальше мы с помощью кинематики опишем разные виды механического движения. Не переключайтесь 😉
Прямолинейное равномерное движение
Движение по прямой, при котором тело проходит равные участки пути за равные промежутки времени называют прямолинейным равномерным. Это любое движение с постоянной скоростью.
Например, если у вас ограничение скорости на дороге 60 км/ч, и у вас нет никаких препятствий на пути — скорее всего, вы будете двигаться прямолинейно равномерно.
Мы можем охарактеризовать это движение следующими величинами.
Скалярные величины (определяются только значением)
- Время — в международной системе единиц СИ измеряется в секундах [с].
- Путь — длина траектории (линии, по которой движется тело). В случае прямолинейного равномерного движения — длина отрезка [м].
Векторные величины (определяются значением и направлением)
- Скорость — характеризует быстроту перемещения и направление движения материальной точки [м/с].
- Перемещение — вектор, проведенный из начальной точки пути в конечную [м].
Проецирование векторов
Векторное описание движения полезно, так как на одном чертеже всегда можно изобразить много разнообразных векторов и получить перед глазами наглядную «картину» движения.
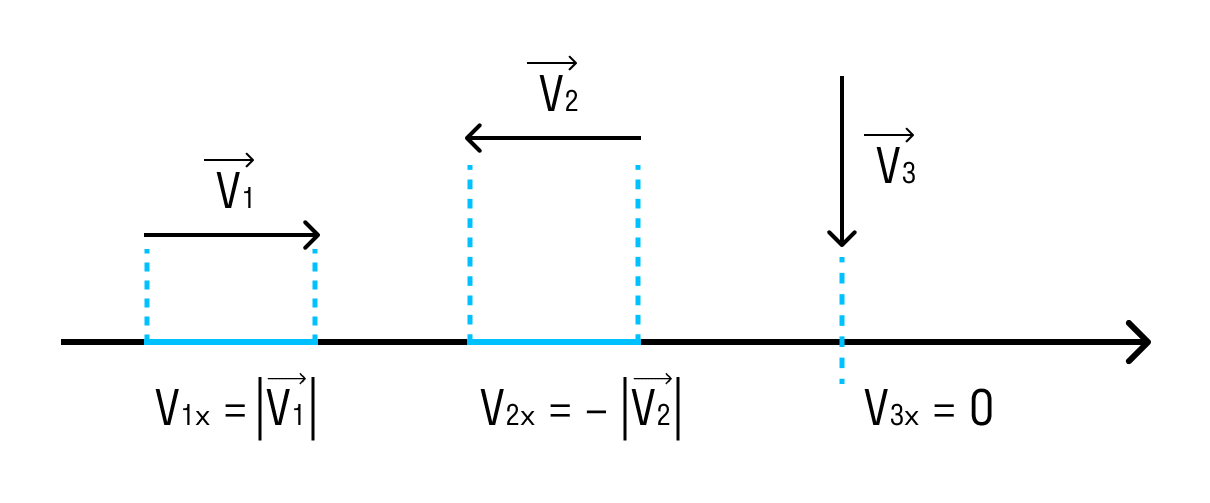
Однако всякий раз использовать линейку и транспортир, чтобы производить действия с векторами, очень трудоёмко. Поэтому эти действия сводят к действиям с положительными и отрицательными числами — проекциями векторов.
Если вектор сонаправлен с осью, то его проекция равна длине вектора. А если вектор противоположно направлен оси — проекция численно равна длине вектора, но отрицательна. Если вектор перпендикулярен — его проекция равна нулю.
Скорость может определяться по вектору перемещения и пути, только это будут две разные характеристики.
Скорость — это векторная физическая величина, которая характеризует быстроту перемещения, а средняя путевая скорость — это отношение длины пути ко времени, за которое путь был пройден.
Скорость
— скорость [м/с]
— перемещение [м]
— время [с]
Средняя путевая скорость
V ср.путевая = S/t
V ср.путевая — средняя путевая скорость [м/с]
S — путь [м]
t — время [с]
Задача
Найдите, с какой средней путевой скоростью должен двигаться автомобиль, если расстояние от Санкт-Петербурга до Великого Новгорода в 210 километров ему нужно пройти за 2,5 часа. Ответ дайте в км/ч.
Решение:
Возьмем формулу средней путевой скорости
V ср.путевая = S/t
Подставим значения:
V ср.путевая = 210/2,5 = 84 км/ч
Ответ: автомобиль будет двигаться со средней путевой скоростью равной 84 км/ч
Уроки физики в онлайн-школе Skysmart не менее увлекательны, чем наши статьи!
Уравнение движения
Одной из основных задач механики является определение положения тела относительно других тел в данный момент времени. Для решения этой задачи помогает уравнение движения, то есть зависимость координаты тела от времени х = х(t).
Уравнение движения
x(t) — искомая координата в момент времени t [м]
x0 — начальная координата [м]
vx — скорость тела в данный момент времени [м/с]
t — момент времени [с]
Если положительное направление оси ОХ противоположно направлению движения тела, то проекция скорости тела на ось ОХ отрицательна, скорость меньше нуля (v
Уравнение движения при движении против оси
x(t) — искомая координата в момент времени t [м]
x0 — начальная координата [м]
vx — скорость тела в данный момент времени [м/с]
t — момент времени [с]
Прямолинейное равноускоренное движение
Чтобы разобраться с тем, что за тип движения в этом заголовке, нужно ввести новое понятие — ускорение.
Ускорение — векторная физическая величина, характеризующая быстроту изменения скорости. В международной системе единиц СИ измеряется в метрах, деленных на секунду в квадрате.
СИ — международная система единиц. «Перевести в СИ» означает перевод всех величин в метры, килограммы, секунды и другие единицы измерения без приставок. Исключение — килограмм с приставкой «кило».
Итак, равноускоренное прямолинейное движение — это движение с ускорением по прямой линии. Движение, при котором скорость тела меняется на равную величину за равные промежутки времени.
Уравнение движения и формула конечной скорости
Основная задача механики не поменялась по ходу текста — определение положения тела относительно других тел в данный момент времени. У равноускоренного движения в уравнении появляется ускорение.
Уравнение движения для равноускоренного движения
x(t) — искомая координата в момент времени t [м]
x0 — начальная координата [м]
v0x — начальная скорость тела в [м/с]
t — время [с]
ax — ускорение [м/с 2 ]
Для этого процесса также важно уметь находить конечную скорость — решать задачки так проще. Конечная скорость находится по формуле:
Формула конечной скорости
— конечная скорость тела [м/с]
— начальная скорость тела [м/с]
— время [с]
— ускорение [м/с 2 ]
Задача
Найдите местоположение автобуса, который разогнался до скорости 60 км/ч за 3 минуты, через 0,5 часа после начала движения из начала координат.
Решение:
Сначала найдем ускорение автобуса. Его можно выразить из формулы конечной скорости:
Так как автобус двигался с места, . Значит
Время дано в минутах, переведем в часы, чтобы соотносилось с единицами измерения скорости.
3 минуты = 3/60 часа = 1/20 часа = 0,05 часа
Подставим значения:
a = v/t = 60/0,05 = 1200 км/ч 2
Теперь возьмем уравнение движения.
x(t) = x0 + v0xt + axt 2 /2
Начальная координата равна нулю, начальная скорость, как мы уже выяснили — тоже. Значит уравнение примет вид:
Ускорение мы только что нашли, а вот время будет равно не 3 минутам, а 0,5 часа, так как нас просят найти координату в этот момент времени.
Подставим циферки:
км
Ответ: через полчаса координата автобуса будет равна 150 км.
Движение по вертикали
Движение по вертикали — это частный случай равноускоренного движения. Дело в том, что на Земле тела падают с одинаковым ускорением — ускорением свободного падения. Для Земли оно приблизительно равно 9,81 м/с 2 , а в задачах мы и вовсе осмеливаемся округлять его до 10 (физики просто дерзкие).
Вообще в значении ускорения свободного падения для Земли очень много знаков после запятой. В школе обычно дают значение: g = 9,8 м/с 2 . В экзаменах ОГЭ и ЕГЭ в справочных данных дают g = 10 м/с 2 .
Частным случаем движения по вертикали (частным случаем частного случая, получается) считается свободное падение — это равноускоренное движение под действием силы тяжести, когда другие силы, действующие на тело, отсутствуют или пренебрежимо малы.
Помните о том, что свободное падение — это не всегда движение по вертикали из состояния покоя. Если мы бросаем тело вверх, то начальная скорость, конечно же, будет.
Векторные формы уравнений движения


Векторная форма уравнения движения
Векторная форма уравнения движения. Описывая уравнение по форме и выражая полную производную по векторной аналитической формуле, мы получаем векторную форму уравнений движения или другие обозначения.
| Сила левая | Сила правая |
| F grad | F eqw |
Проекция с уравнением является гидродинамическим уравнением Эйлера. Использование гидромеханики известных преобразований из векторного анализа это будет то же векторное уравнение или другая форма другой нотации.
Это движение считается связанным с выбранной системой отсчета на поверхности Земли или в центре массы Земли. Для инерциальной системы отсчета, уравнения движения в форме Эйлера линейно и равномерно в условиях «абсолютно неподвижного пространства», движение твердого тела описывается векторным уравнением.
Относительное движение массы
Здесь как основной вектор, так и угловой момент твердого тела относительно его центра масс являются основными векторами и моментами для центра масс всех внешних сил, действующих на твердое тело. Их следует считать не сплошными, а системой переменной конфигурации.
Для этого можно рассмотреть мгновенный затвердевший объект, применить силу реакции,силу внутри колориста, вариационную силу. Они представляют собой фиктивные «закаленные» объекты.
Внутренняя сила инерции кролика обусловлена относительным движением массы внутри твердой оболочки тела при вращении.Вариационная сила обусловлена нестационарным движением массы в твердой оболочке.
Часто совокупность сил: реактивная сила, статическая сила, возникающая из разности атмосферного давления уравнения движения в форме Ламба и давления газа на входе впускного отверстия и сопла воздухозаборника, и изменяющаяся сила объединяются и обозначаются вектором, называемым тяговым усилием двигателя. Иногда различают понятия двигателя и движителя.



Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
[spoiler title=”источники:”]
http://skysmart.ru/articles/physics/mehanicheskoe-dvizhenie
http://lfirmal.com/vektornye-formy-uravnenij-dvizheniya/
[/spoiler]
Кинематика изучает простейшую форму движения – механическое движение. Кинематически определить движение тела – это значит указать его положение относительно выбранной системы отсчета в каждый момент времени.
Движение материальной точки (в дальнейшем будем говорить просто точки) задано, если известен закон движения.
Закон движения. Закон движения – это уравнение, позволяющее определить положение точки относительно выбранной системы отсчета в любой момент времени.
Основная задача кинематики точки. По известному закону движения определить траекторию движения точки, ее положение на траектории, скорость и ускорение точки в ее положении на траектории.
Способы задания движения точки
В зависимости от выбора системы отсчета существуют три способа задания движения точки – векторный, координатный и естественный. Рассмотрим эти способы задания движения в отдельности.
Векторный способ задания движения точки
Пусть точка  движется вдоль некоторой линии. В качестве начала отсчета выберем произвольный центр
движется вдоль некоторой линии. В качестве начала отсчета выберем произвольный центр  . Положение точки на линии определяется радиус-вектором
. Положение точки на линии определяется радиус-вектором ") (рис.К.9).
(рис.К.9).

Таким образом, вектор ") определяет положение движущейся точки в любой момент времени. Следовательно, уравнение является законом движения при векторном способе задания движения.
определяет положение движущейся точки в любой момент времени. Следовательно, уравнение является законом движения при векторном способе задания движения.
Величина  называется вектором скорости точки. Вектор скорости точки всегда направлен по касательной к годографу (траектории движения точки) в сторону перемещения точки.
называется вектором скорости точки. Вектор скорости точки всегда направлен по касательной к годографу (траектории движения точки) в сторону перемещения точки.
Величина  называется вектором ускорения точки.
называется вектором ускорения точки.
Определим направление вектора  . Направление вектора определяется направлением вектора
. Направление вектора определяется направлением вектора  . Пусть точка движется по некоторой траектории (рис.К.10) от точки
. Пусть точка движется по некоторой траектории (рис.К.10) от точки  к точке
к точке  . Пусть скорость в точке равна
. Пусть скорость в точке равна  , а скорость в точке равна
, а скорость в точке равна  . Перенесем вектор параллельно самому себе из точки в точку .
. Перенесем вектор параллельно самому себе из точки в точку .
Тогда вектор  .
.

Как показано на рис.К.10, вектор направлен в сторону вогнутости траектории движения точки, следовательно и вектор ускорения всегда направлен в ту же сторону, то есть в сторону вогнутости траектории движения точки.
Координатный способ задания движения точки
Пусть точка движется вдоль некоторой линии. В качестве системы отсчета выберем декартовую систему координат с началом в произвольном центре . Тогда положение точки на линии определяются текущими координатами в любой момент времени \
y = y(t)
end{array} right.")

Следовательно, система уравнений определяют закон движения точки при координатном способе задания движения. Исключая из закона движения время  , получим уравнение вида
, получим уравнение вида ") , являющееся уравнением траектории движения точки.
, являющееся уравнением траектории движения точки.
Пример. Закон движения записывается уравнениями  . Найти уравнение траектории движения точки.
. Найти уравнение траектории движения точки.
Решение. Из первого уравнения следует, что ") или
или  = frac{x}{5}") . Тогда из второго уравнения
. Тогда из второго уравнения  + 1 = frac{6}{5}x + 1") . Или
. Или  . Таким образом получено, что траекторией движения точки является прямая линия .
. Таким образом получено, что траекторией движения точки является прямая линия .
Компоненты скорости и ускорения движущейся точки в любой момент времени определяются по формулам
}}{{dt}} = dot x(t)")
")
}}{{dt}} = dot y(t)")
") (К.9)
(К.9)
.
Модули скорости и ускорения 
 (К.10)
(К.10)
Векторы скорости и ускорения

 .
.
Векторный способ описания движения материальной точки
4.7
Средняя оценка: 4.7
Всего получено оценок: 147.
4.7
Средняя оценка: 4.7
Всего получено оценок: 147.
Кинематика описывает движение, не рассматривая его причины. Для такого описания может использоваться несколько способов. Кратко рассмотрим векторный способ описания движения материальной точки.
Описание движения
Описание движения — это ответ на вопрос, как менялось положение точки в пространстве со временем. Чтобы получить этот ответ, необходимо выбрать способ сопоставления моментов времени и положения в пространстве, способ измерения времени и способ определения положения точки.
Способом сопоставления может стать таблица или математическая функция. Таблица проще, однако она описывает только определенные моменты времени. Математическая функция описывает любой момент времени, поэтому используется чаще.
Для определения времени и положения в пространстве используется система отсчета.

Моменты времени отмечаются с использованием некоторого эталонного процесса. В прошлом таким процессом было суточное вращение Земли, в настоящее время используется частота излучения возбужденных атомов цезия.
Положение в пространстве может задаваться несколькими способами, одним из которых является векторный.
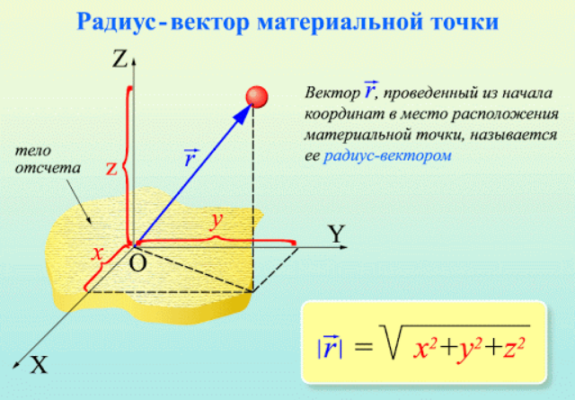
Радиус-вектор
Как известно из геометрии, вектор — это отрезок на плоскости или в пространстве, для которого можно указать начало и конец. При этом для вектора важны не абсолютные координаты начала и конца в пространстве, а их разница. Положение вектора можно менять, сохраняя ее (параллельный перенос), сам вектор при этом не изменится.
Последнее свойство векторов позволяет использовать их для однозначного задания положения точек в пространстве. Начало вектора помещается в начало координат, а конец вектора — в рассматриваемую точку. Вектор, построенный таким образом, называется радиус-вектором точки и обозначается $overrightarrow r$.
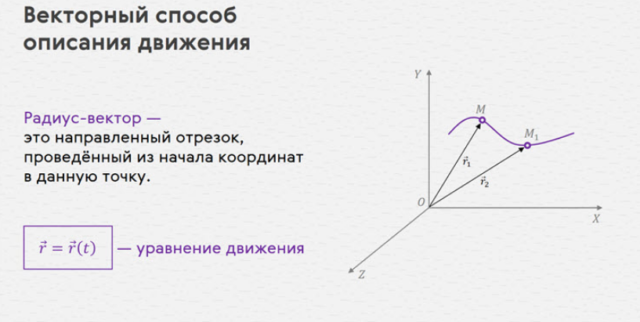
Векторная функция движения
При описании движения векторным способом задается соответствие между моментами времени и радиус-вектором:
$$overrightarrow r=overrightarrow r(t)$$
Данная формула — это уравнение движения точки, записанное в векторной форме. Функция $overrightarrow r(t)$ — векторная функция, в которой используются правила действий с векторами.
Такая запись, как правило, заметно компактнее и проще, чем работа непосредственно с координатами точки. Однако математические действия с векторами требуют проецирования вектора на оси координат, алгебраического сложения длин, взятых с нужным знаком, и затем восстановления результата по проекциям. Поэтому векторный способ описания больше подходит тогда, когда требуется вывод законов и формул. В этом случае векторное уравнение позволяет выделить суть закона или формулы, не загромождая формулировки математическими выкладками.
Примером может служить векторная запись свободного падения тела с нулевой начальной скоростью и начальным положением $overrightarrow {r_0}$:
$$overrightarrow r=overrightarrow {r_0}+{overrightarrow { mathrm{g}} t^2over 2}$$
Такая запись одинаково пригодна для любого числа осей координат и любого их направления. Если же записать то же уравнение в координатной форме, то потребуется несколько уравнений (по числу координатных осей), при этом для каждой оси ускорение свободного падения $mathrm{g}$ будет представлено соответствующей компонентой (проекцией). Можно задаться системой координат так, чтобы вектор $mathrm{g}$ был параллелен одной из осей. В этом случае формулы заметно упрощаются, однако возможность задаться удобной системой координат имеется не всегда.
Поэтому для физических законов векторная форма находит самое широкое применение. Она имеет компактную однострочную форму, при этом описывая движение сразу по всем координатным осям.

Что мы узнали?
В физике широкое применение находит векторный способ описания движения точки. Он имеет такую же точность, как координатный способ, но при этом учитывает сразу все координатные оси и записывается гораздо более компактно. Поэтому такой способ описания движения очень подходит для законов и формул: он позволяет выделить суть закона, не загромождая формулировку.
Тест по теме
Доска почёта
Чтобы попасть сюда – пройдите тест.
Пока никого нет. Будьте первым!
Оценка доклада
4.7
Средняя оценка: 4.7
Всего получено оценок: 147.
А какая ваша оценка?
1. Дифференциальные уравнения движения материальной точки
Используя
основное уравнение динамики материальной
точки (1.5), можно получить дифференциальные
уравнения движения материальной точки
в различных системах координат.
1.1. Дифференциальное уравнение движения материальной точки в векторной форме
Пусть
материальная точка M
массой

движется под действием равнодействующей
всех заданных сил и сил реакций связей
 (рис. 2), применяяуравнение
(рис. 2), применяяуравнение
динамики материальной точки (1.5),
получим
 ,
,
(2.1)
где
 – вектор ускорения точкиM.
– вектор ускорения точкиM.
Из
кинематики точки известно, что ускорение
движущейся точки
 и ее радиус-вектор
и ее радиус-вектор связаны соотношением
связаны соотношением
 .
.
Подставляя это
соотношение в формулу (2.1), получим
 .(2.2)
.(2.2)
Формула (2.2) является
дифференциальным
уравнением движения материальной точки
в векторной форме.
1.2. Дифференциальные уравнения движения материальной точки
в
декартовой системе координат
Проецируя
уравнение (2.1) на оси декартовой
прямоугольной системы координат, получим
 ,
, ,
, ,
,
где
 ,
, ,
, – проекции ускорения точки на оси
– проекции ускорения точки на оси
декартовых координат.
Из
кинематики точки известны соотношения:
 ,
,  ,
, ,
,
йгде
 ,
,
 ,
, –проекции
–проекции
скорости точки на оси декартовых
координат.
Окончательно,
получим
 ,
,
 ,
,
(2.3)
 .
.
Полученная система
уравнений (2.3) представляет собой
дифференциальные
уравнения движения материальной точки
в декартовой системе координат.
1.3.
Дифференциальные уравнения движения
материальной точки
для
естественных подвижных осей
Проецируя
уравнение (2.1) на естественные подвижные
оси координат (рис. 3), получим
 ;
;  ;
; ,
,
где
 ,
, ,
, ,
, ,
, ,
, – соответственно проекции векторов
– соответственно проекции векторов
ускорения и равнодействующей силы на
касательную, главную нормаль и бинормаль
к траектории.
Из
кинематики точки известны следующие
соотношения:
 ;
;  ;
; ,
,
где
 – радиус кривизны траектории,
– радиус кривизны траектории,
 – скорость
– скорость
материальной точки.
Подставляя эти
соотношения в выражения для
 ,
, ,
, ,
,
получим
 ;
;
 ;
;
(2.4)
 .
.
Полученные уравнения
называют дифференциальными
уравнениями движения материальной
точки для естественных подвижных осей.
Эти уравнения иногда удобны для
исследования движения точки по плоским
траекториям.
2. Две основные задачи динамики материальной точки
Используя
дифференциальные уравнения движения
материальной точки в векторной (2.2),
координатной (2.3) или естественной (2.4)
форме, можно решать две основные задачи
динамики материальной точки. Рассмотрим
эти задачи.
2.1. Первая основная задача динамики материальной точки
Первую
основную задачу динамики материальной
точки
формулируют следующим образом: по
заданной массе материальной точки и
закону ее движения требуется определить
действующую на эту точку силу.
Рассмотрим порядок
решения этой задачи для случая, если
движение материальной точки массой
 задано координатным способом.
задано координатным способом.
1. Пусть координаты
движущейся точки заданы как функции
времени:
 ;
;  ;
; .
.
2. Определяем
проекции силы на координатные оси из
дифференциальных уравнений движения
(2.3) по формула
 ;
;
 ;
; .
.
3. Зная проекции
силы на координатные оси, определяем
модуль искомой силы, а также ее направляющие
косинусы по формулам
 ,
,
 ;
;  ;
; .
.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
