Решение задачи (РГР) К1 «Определение скорости и ускорения точки по заданным уравнениям ее движения» по разделу «кинематика» теоретической механики.
Пример определения для заданного момента времени положения точки на траектории, скорости, полного, касательного и нормального ускорения, радиуса кривизны траектории и вида траектории движения точки, если движение точки задано уравнениями.
Задача
Движение точки M задано уравнениями:
Требуется:
Установить вид траектории движения точки M, и для момента времени t = t1 = 0,5 с найти:
- положение точки на траектории,
- скорость, полное, касательное и нормальное ускорения,
- радиус кривизны траектории.
Другие примеры решений >
Помощь с решением задач >
Решение
Расчет траектории движения точки
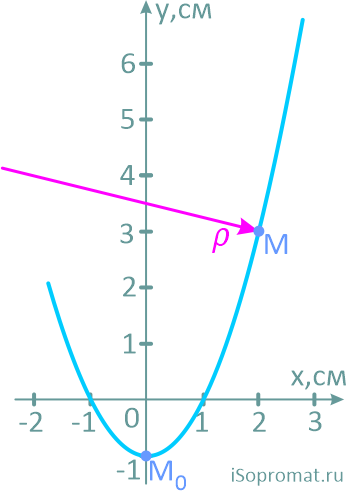
Уравнения движения можно рассматривать как параметрические уравнения траектории точки.
Другие видео
Чтобы узнать вид траектории в координатной форме, надо получить прямую зависимость между переменными x и y, для этого избавимся от параметра времени t, выразив его, например, из первого уравнения и подставив во второе.
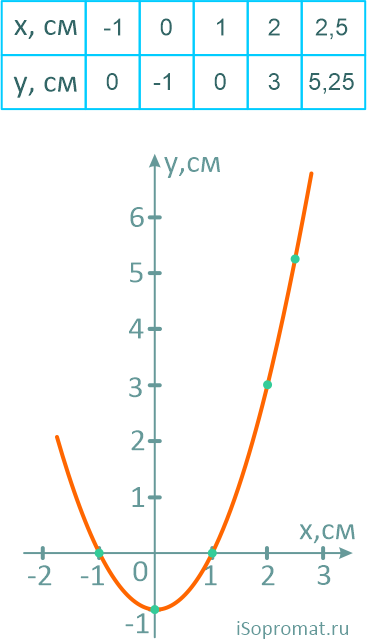
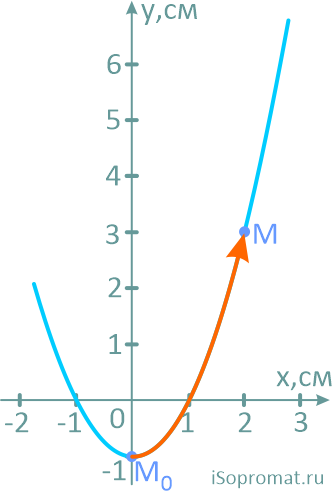
Получилось квадратное уравнение. То есть точка движется по параболе.
Построим траекторию движения, рассчитав несколько её точек.
Положение точки на траектории
Определим положения точки в начале движения и в заданный момент времени.
Для этого в исходные уравнения подставляем соответственно сначала 0
а затем, половину секунды.
Положение точки на ее траектории в заданный момент обозначим буквой M, и все остальные параметры будем рассчитывать для неё.
Расчет скорости точки
Направление и величину скорости точки определим как векторную сумму её проекций на оси координат.
![]()
Здесь i, j — орты осей x и y.
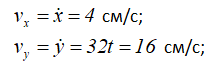
vx, vy — проекции вектора скорости на оси координат.
Проекции вектора скорости получим, взяв первые производные по времени t от соответствующих заданных уравнений движения точки.
Далее выбрав масштаб, из точки M последовательно и с учетом знака, откладываем оба вектора.
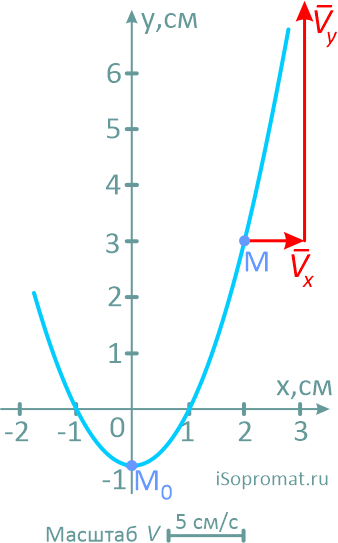
Сам вектор скорости получим, соединив точку M с концом второго вектора и направив его по ходу движения точки.
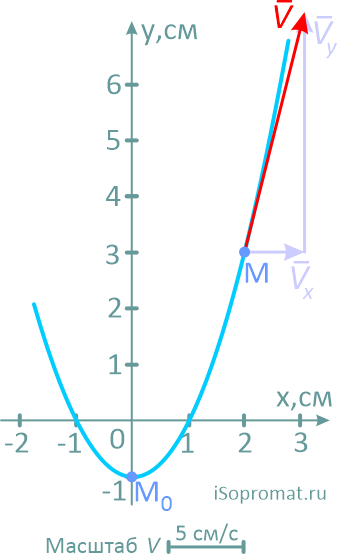
Здесь надо отметить, что вектор скорости всегда должен располагаться по касательной к траектории. Любое другое положение будет указывать на ошибки в расчетах.
Рассчитаем модуль вектора скорости

Расчет ускорений точки
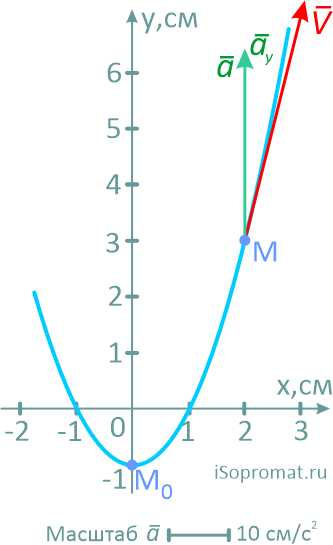
Проекции полного ускорения точки на оси координат определяются как вторая производная от исходных уравнений движения точки.

Здесь, ax, ay – проекции ускорения точки на оси координат.
В этом примере, горизонтальная проекция ускорения оказалась равной нулю, поэтому его модуль и направление будут совпадать с вертикальной.
![]()
Касательная составляющая полного ускорения это производная скорости точки по времени.

Ее можно рассчитать по этой формуле.

Вектор касательного ускорения всегда направлен по линии вектора скорости.
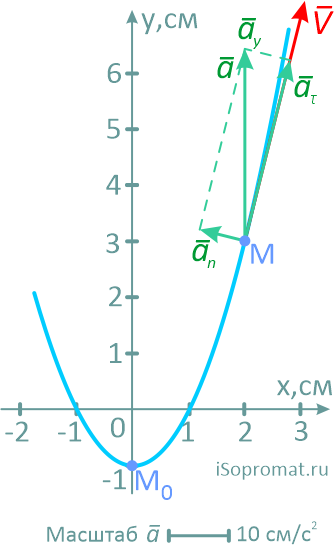
Положительная величина говорит об ускоренном движении точки и тогда направления скорости и касательного ускорения совпадают.
В противном случае они разнонаправлены, и движение точки замедляется.
Модуль нормального ускорения определим по формуле Пифагора, так как векторы касательного и центростремительного ускорений всегда взаимно перпендикулярны.

Расчет радиуса кривизны траектории
Осталось найти только радиус кривизны траектории в точке M, который равен отношению квадрата скорости к модулю нормального ускорения.
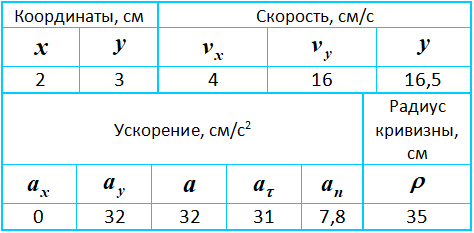
Результаты расчетов
Результаты вычислений для заданного момента времени t1=0,5c приведены в таблице:
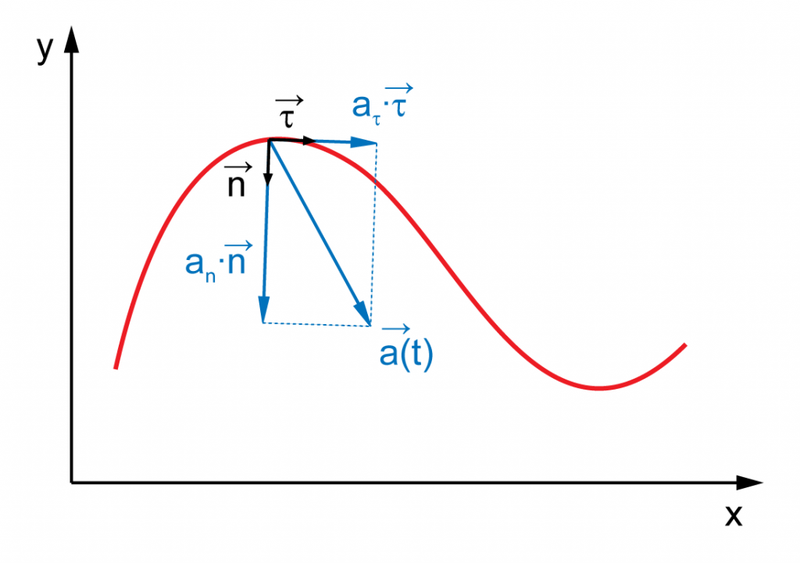
На рисунке показано положение точки M в заданный момент времени и векторы скорости и ускорений в выбранном масштабе.
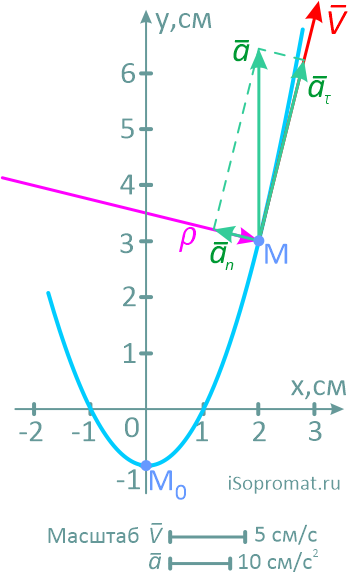
Вектор v строим по составляющим vx и vy, причем этот вектор должен по направлению совпадать с касательной к траектории.
Вектор a строим по составляющим ax и ay и затем раскладываем на составляющие векторы aτ и an. Совпадение величин aτ и an, найденных из чертежа, с их значениями, полученными аналитически, служит критерием правильности решения.
Другие примеры решения задач >
Механическое движение
О чем эта статья:
Механическое движение
Когда мы идем в школу или на работу, автобус подъезжает к остановке или сладкий корги гуляет с хозяином, мы имеем дело с механическим движением.
Механическим движением называется изменение положения тел в пространстве относительно других тел с течением времени.
«Относительно других тел» — очень важные слова в этом определении. Для описания движения нам нужны:
- тело отсчета
- система координат
- часы
В совокупности эти три параметра образуют систему отсчета.
В механике есть такой раздел — кинематика. Он отвечает на вопрос, как движется тело. Дальше мы с помощью кинематики опишем разные виды механического движения. Не переключайтесь 😉
Прямолинейное равномерное движение
Движение по прямой, при котором тело проходит равные участки пути за равные промежутки времени называют прямолинейным равномерным. Это любое движение с постоянной скоростью.
Например, если у вас ограничение скорости на дороге 60 км/ч, и у вас нет никаких препятствий на пути — скорее всего, вы будете двигаться прямолинейно равномерно.
Мы можем охарактеризовать это движение следующими величинами.
Скалярные величины (определяются только значением)
- Время — в международной системе единиц СИ измеряется в секундах [с].
- Путь — длина траектории (линии, по которой движется тело). В случае прямолинейного равномерного движения — длина отрезка [м].
Векторные величины (определяются значением и направлением)
- Скорость — характеризует быстроту перемещения и направление движения материальной точки [м/с].
- Перемещение — вектор, проведенный из начальной точки пути в конечную [м].
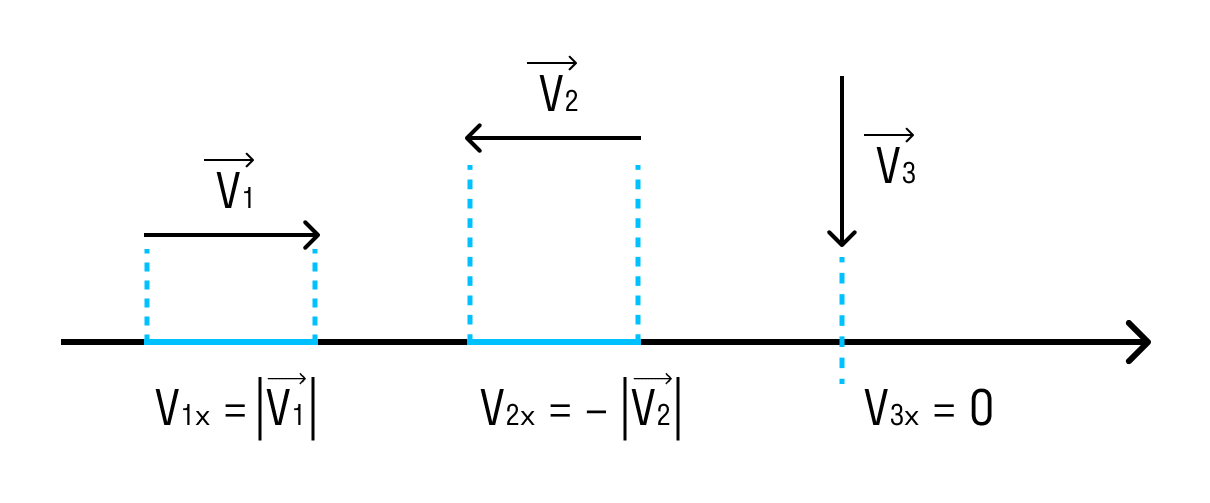
Проецирование векторов
Векторное описание движения полезно, так как на одном чертеже всегда можно изобразить много разнообразных векторов и получить перед глазами наглядную «картину» движения.
Однако всякий раз использовать линейку и транспортир, чтобы производить действия с векторами, очень трудоёмко. Поэтому эти действия сводят к действиям с положительными и отрицательными числами — проекциями векторов.
Если вектор сонаправлен с осью, то его проекция равна длине вектора. А если вектор противоположно направлен оси — проекция численно равна длине вектора, но отрицательна. Если вектор перпендикулярен — его проекция равна нулю.
Скорость может определяться по вектору перемещения и пути, только это будут две разные характеристики.
Скорость — это векторная физическая величина, которая характеризует быстроту перемещения, а средняя путевая скорость — это отношение длины пути ко времени, за которое путь был пройден.
Скорость
— скорость [м/с]
— перемещение [м]
— время [с]
Средняя путевая скорость
V ср.путевая = S/t
V ср.путевая — средняя путевая скорость [м/с]
S — путь [м]
t — время [с]
Задача
Найдите, с какой средней путевой скоростью должен двигаться автомобиль, если расстояние от Санкт-Петербурга до Великого Новгорода в 210 километров ему нужно пройти за 2,5 часа. Ответ дайте в км/ч.
Решение:
Возьмем формулу средней путевой скорости
V ср.путевая = S/t
Подставим значения:
V ср.путевая = 210/2,5 = 84 км/ч
Ответ: автомобиль будет двигаться со средней путевой скоростью равной 84 км/ч
Уроки физики в онлайн-школе Skysmart не менее увлекательны, чем наши статьи!
Уравнение движения
Одной из основных задач механики является определение положения тела относительно других тел в данный момент времени. Для решения этой задачи помогает уравнение движения, то есть зависимость координаты тела от времени х = х(t).
Уравнение движения
x(t) — искомая координата в момент времени t [м]
x0 — начальная координата [м]
vx — скорость тела в данный момент времени [м/с]
t — момент времени [с]
Если положительное направление оси ОХ противоположно направлению движения тела, то проекция скорости тела на ось ОХ отрицательна, скорость меньше нуля (v
Уравнение движения при движении против оси
x(t) — искомая координата в момент времени t [м]
x0 — начальная координата [м]
vx — скорость тела в данный момент времени [м/с]
t — момент времени [с]
Прямолинейное равноускоренное движение
Чтобы разобраться с тем, что за тип движения в этом заголовке, нужно ввести новое понятие — ускорение.
Ускорение — векторная физическая величина, характеризующая быстроту изменения скорости. В международной системе единиц СИ измеряется в метрах, деленных на секунду в квадрате.
СИ — международная система единиц. «Перевести в СИ» означает перевод всех величин в метры, килограммы, секунды и другие единицы измерения без приставок. Исключение — килограмм с приставкой «кило».
Итак, равноускоренное прямолинейное движение — это движение с ускорением по прямой линии. Движение, при котором скорость тела меняется на равную величину за равные промежутки времени.
Уравнение движения и формула конечной скорости
Основная задача механики не поменялась по ходу текста — определение положения тела относительно других тел в данный момент времени. У равноускоренного движения в уравнении появляется ускорение.
Уравнение движения для равноускоренного движения
x(t) — искомая координата в момент времени t [м]
x0 — начальная координата [м]
v0x — начальная скорость тела в [м/с]
t — время [с]
ax — ускорение [м/с 2 ]
Для этого процесса также важно уметь находить конечную скорость — решать задачки так проще. Конечная скорость находится по формуле:
Формула конечной скорости
— конечная скорость тела [м/с]
— начальная скорость тела [м/с]
— время [с]
— ускорение [м/с 2 ]
Задача
Найдите местоположение автобуса, который разогнался до скорости 60 км/ч за 3 минуты, через 0,5 часа после начала движения из начала координат.
Решение:
Сначала найдем ускорение автобуса. Его можно выразить из формулы конечной скорости:
Так как автобус двигался с места, . Значит
Время дано в минутах, переведем в часы, чтобы соотносилось с единицами измерения скорости.
3 минуты = 3/60 часа = 1/20 часа = 0,05 часа
Подставим значения:
a = v/t = 60/0,05 = 1200 км/ч 2
Теперь возьмем уравнение движения.
x(t) = x0 + v0xt + axt 2 /2
Начальная координата равна нулю, начальная скорость, как мы уже выяснили — тоже. Значит уравнение примет вид:
Ускорение мы только что нашли, а вот время будет равно не 3 минутам, а 0,5 часа, так как нас просят найти координату в этот момент времени.
Подставим циферки:
км
Ответ: через полчаса координата автобуса будет равна 150 км.
Движение по вертикали
Движение по вертикали — это частный случай равноускоренного движения. Дело в том, что на Земле тела падают с одинаковым ускорением — ускорением свободного падения. Для Земли оно приблизительно равно 9,81 м/с 2 , а в задачах мы и вовсе осмеливаемся округлять его до 10 (физики просто дерзкие).
Вообще в значении ускорения свободного падения для Земли очень много знаков после запятой. В школе обычно дают значение: g = 9,8 м/с 2 . В экзаменах ОГЭ и ЕГЭ в справочных данных дают g = 10 м/с 2 .
Частным случаем движения по вертикали (частным случаем частного случая, получается) считается свободное падение — это равноускоренное движение под действием силы тяжести, когда другие силы, действующие на тело, отсутствуют или пренебрежимо малы.
Помните о том, что свободное падение — это не всегда движение по вертикали из состояния покоя. Если мы бросаем тело вверх, то начальная скорость, конечно же, будет.
Вектор скорости и ускорения материальной точки и их модули. Пример решения задач.
В очередной раз меня попросили решить пару задачек по физике, и я вдруг обнаружил, что не могу решить их с ходу. Немного погуглив, я обнаружил, что сайты в топе выдачи содержат сканы одного и того же учебника и не описывают конкретных примеров решений задачи о том, как найти вектор скорости и ускорения материальной точки. По-этому я решил поделиться с миром примером своего решения.
Траектория движения материальной точки через радиус-вектор
Подзабыв этот раздел математики, в моей памяти уравнения движения материальной точки всегда представлялись при помощи знакомой всем нам зависимости y(x) , и взглянув на текст задачи, я немного опешил когда увидел векторы. Оказалось, что существует представление траектории материальной точки при помощи радиус-вектора – вектора, задающего положение точки в пространстве относительно некоторой заранее фиксированной точки, называемой началом координат.

Формула траектория движения материальной точки помимо радиус-вектора описывается так же ортами – единичными векторами i, j , k в нашем случае совпадающими с осями системы координат. И, наконец, рассмотрим пример уравнения траектории материальной точки (в двумерном пространстве):

Что интересного в данном примере? Траектория движения точки задается синусами и косинусами, как вы думаете, как будет выглядеть график в всем нам знакомом представлении y(x) ? “Наверное какой-то жуткий”, подумали вы, но все не так сложно как кажется! Попробуем построить траекторию движения материальной точки y(x), если она движется по представленному выше закону:

Здесь я заметил квадрат косинуса, если вы в каком-нибудь примере видите квадрат синуса или косинуса, это значит что нужно применять основное тригонометрическое тождество, что я и сделал (вторая формула) и преобразовал формулу координаты y, чтобы вместо синуса подставить в нее формулу изменения x:

В итоге жуткий закон движения точки оказался обычной параболой, ветви которой направлены вниз. Надеюсь, вы поняли примерный алгоритм построения зависимости y(x) из представления движения через радиус-вектор. Теперь перейдем к нашему главному вопросу: как же найти вектор скорости и ускорения материальной точки, а так же их модули.
Вектор скорости материальной точки

Всем известно, что скорость материальной точки – это величина пройденного пути точкой за единицу времени, то есть производная от формулы закона движения. Чтобы найти вектор скорости нужно взять производную по времени. Давайте рассмотрим конкретный пример нахождения вектора скорости.
Пример нахождения вектора скорости
Имеем закон перемещения материальной точки:

Теперь нужно взять производную от этого многочлена, если вы забыли как это делается, то вот вам таблица производных различных функций. В итоге вектор скорости будет иметь следующий вид:

Все оказалось проще, чем вы думали, теперь найдем вектор ускорения материальной точки по тому же самому закону, представленному выше.
Как найти вектор ускорения материальной точки

Вектор ускорения точки это векторная величина, характеризующая изменение с течением времени модуля и направления скорости точки. Чтобы найти вектор ускорения материальной точки в нашем примере, нужно взять производную, но уже от формулы вектора скорости, представленной чуть выше:

Модуль вектора скорости точки
Теперь найдем модуль вектора скорости материальной точки. Как вы знаете из 9-го класса, модуль вектора – это его длина, в прямоугольных декартовых координатах равна квадратному корню из суммы квадратов его координат. И откуда же из полученного нами выше вектора скорости взять его координаты спросите вы? Все очень просто:

Теперь достаточно только подставить время, указанное в задаче и получить конкретное числовое значение.
Модуль вектора ускорения
Как вы поняли из написанного выше (и из 9-го класса), нахождение модуля вектора ускорения происходит тем же образом, что и модуля вектора скорости: извлекаем корень квадратный из суммы квадратов координат вектора, все просто! Ну и вот вам, конечно же, пример:

Как вы видите, ускорение материальной точки по заданному выше закону не зависит от времени и имеет постоянную величину и направление.
Еще примеры решений задачи нахождения вектора скорости и ускорения
А вот тут вы можете найти примеры решения и других задач по физике на тему “механика твердых тел”. А для тех, кто не совсем понял как найти вектор скорости и ускорения, вот вам еще парочка примеров из сети без всяких лишних объяснений, надеюсь, они вам помогут.

Если у вас возникли какие-нибудь вопросы, вы можете задать их в комментариях.
Как найти скорость если известна начальная скорость и время?
Итак, чтобы найти скорость, к начальной скорости прибавляем произведение ускорения на время. Если V0 = 0, то V = а*t. Чтобы найти время, нужно вначале найти разность между скоростью в данный момент и начальной скоростью, затем полученный результат разделить на ускорение.
Как найти начальную скорость предмета?
Если известны пройденное расстояние, время и ускорение, для определения начальной скорости можно использовать следующее соотношение:
- Vi = (d / t) — [(a * t) / 2]
- В эту формулу входят следующие величины: Vi — начальная скорость d — пройденное расстояние a — ускорение t — время
Как найти скорость при равноускоренном движении?
Формула для скорости при равноускоренном движении: v = v 0 + a t . Здесь v 0 — начальная скорость тела, a = c o n s t — ускорение. Покажем на графике, что при равноускоренном движении зависимость v ( t ) имеет вид прямой линии.
Как найти ускорение если известна начальная скорость и время?
Ускорение показывает изменение скорости движущегося тела, рассчитывается по двум скоростям и времени. Чтобы вычислить ускорение, следует найти разницу между скоростью в данный момент и начальной скоростью, затем все это разделить на время.
Как найти скорость если есть время и расстояние?
Чтобы узнать скорость движения, нужно расстояние разделить на время. Чтобы узнать расстояние, нужно скорость умножить на время. Чтобы найти время, нужно расстояние разделить на скорость.
Как найти начальную скорость ускорение?
Итак, чтобы найти скорость, к начальной скорости прибавляем произведение ускорения на время. Если V0 = 0, то V = а*t. Чтобы найти время, нужно вначале найти разность между скоростью в данный момент и начальной скоростью, затем полученный результат разделить на ускорение.
Как найти силу в физике?
Формула Умножьте массу на ускорение. Сила F, необходимая для того, чтобы придать объекту массой m ускорение a, определяется по следующей формуле: F = m x a. То есть сила равна массе, умноженной на ускорение.
Как найти скорость при равноускоренном прямолинейном движении?
Скорость прямолинейного равноускоренного движения: v x = v 0 x + a x t , где v 0 x — проекция начальной скорости, a x — проекция ускорения, t — время.
Как найти скорость при Равнозамедленном движении?
S = v 2 − v 0 2 2 a , где v 0 — модуль скорости в начале временного интервала; v — модуль скорости в конце временного интервала; a — модуль ускорения.
Как определить путь при равноускоренном движении?
1. Скорость и путь при равноускоренном движении
- s = v 0 t + a t 2 2 , где а — это ускорение. …
- Зависимость ускорения от времени. …
- Зависимость скорости от времени. …
- Правило определения пути по графику v(t): численное значение перемещения (пути) — это площадь прямоугольника под графиком скорости.
- Зависимость пути от времени.
Как найти время торможения?
Зная силу торможения, но не зная его время, вы можете произвести необходимые расчеты по формуле:t = m⋅υ0/ Fтр, где t – время торможения, m – масса движущегося тела, υ0 – скорость тела в момент начала торможения, Fтр – сила торможения.
Как найти скорость из уравнения движения?
Ее вычисляют при помощи выражения: v=st(9), где s — путь; t — время движения.
Как найти ускорение если известна масса и сила?
m = F / a — Масса равна отношению силы к ускорения. Ускорение — физическая величина, определяющая быстроту изменения скорости тела, то есть первая производная от скорости по времени. a = F / m — Ускорение равно отношению силы к массы.
Как найти скорость время расстояние 4 класс?
- Скорость — это расстояние, пройденное за единицу времени: за 1 секунду, за 1 минуту, за 1 час и так далее.
- скорость = расстояние : время
- время = расстояние : скорость
- расстояние = скорость · время
Как найти скорость по математике?
Чтобы найти скорость, нужно расстояние разделить на время движения. Если расстояние дано в километрах, а время движения в часах, скорость измеряется в километрах в час (км/ч).
Что такое скорость время расстояние?
Скорость — это отношение пройденного пути ко времени, за которое этот путь пройден. Расстояние = Скорость * Время, s=v*t; Пример задачи.
[spoiler title=”источники:”]
http://avtograf70.ru/raznoe/kak-najti-skorost-esli-izvestna-nachalnaya-skorost-i-vremya.html
[/spoiler]
В прошлой статье мы немножко разобрались с тем, что такое механика и зачем она нужна. Мы уже знаем, что такое система отсчета, относительность движения и материальная точка. Что ж, пора двигаться дальше! Здесь мы рассмотрим основные понятия кинематики, соберем вместе самые полезные формулы по основам кинематики и приведем практический пример решения задачи.
Присоединяйтесь к нам в телеграм и получайте ежедневную рассылку с полезной информацией по актуальным студенческим вопросам.
Траектория, радиус-вектор, закон движения тела
Кинематикой занимался еще Аристотель. Правда, тогда это не называлось кинематикой. Затем очень большой вклад в развитие механики, и кинематики в частности, внес Галилео Галилей, изучавший свободное падение и инерцию тел.
Итак, кинематика решает вопрос: как тело движется. Причины, по которым оно пришло в движение, ее не интересуют. Кинематике не важно, сама поехала машина, или ее толкнул гигантский динозавр. Абсолютно все равно.
Сейчас мы будем рассматривать самую простую кинематику – кинематику точки. Представим, что тело (материальная точка) движется. Не важно, что это за тело, все равно мы рассматриваем его, как материальную точку. Может быть, это НЛО в небе, а может быть, бумажный самолетик, который мы запустили из окна. А еще лучше, пусть это будет новая машина, на которой мы едем в путешествие. Перемещаясь из точки А в точку Б, наша точка описывает воображаемую линию, которая называется траекторией движения. Другое определение траектории – годограф радиус вектора, то есть линия, которую описывает конец радиус-вектора материальной точки при движении.
Радиус-вектор – вектор, задающий положение точки в пространстве.
Для того, чтобы узнать положение тела в пространстве в любой момент времени, нужно знать закон движения тела – зависимость координат (или радиус-вектора точки) от времени.
Перемещение и путь
Тело переместилось из точки А в точку Б. При этом перемещение тела – отрезок, соединяющий данные точки напрямую – векторная величина. Путь, пройденный телом – длина его траектории. Очевидно, перемещение и путь не стоит путать. Модуль вектора перемещения и длина пути совпадают лишь в случае прямолинейного движения.

В системе СИ перемещение и длина пути измеряются в метрах.
Перемещение равно разнице радиус-векторов в начальный и конечный моменты времени. Другими словами, это приращение радиус вектора.
Скорость и ускорение
Средняя скорость – векторная физическая величина, равная отношению вектора перемещения к промежутку времени, за которое оно произошло
А теперь представим, что промежуток времени уменьшается, уменьшается, и становится совсем коротким, стремится к нулю. В таком случае о средней скорости говорить на приходится, скорость становится мгновенной. Те, кто помнит основы математического анализа, тут же поймут, что в дальнейшем нам не обойтись без производной.
Мгновенная скорость – векторная физическая величина, равная производной от радиус вектора по времени. Мгновенная скорость всегда направлена по касательной к траектории.
В системе СИ скорость измеряется в метрах в секунду
Если тело движется не равномерно и прямолинейно, то у него есть не только скорость, но и ускорение.
Ускорение (или мгновенное ускорение) – векторная физическая величина, вторая производная от радиус-вектора по времени, и, соответственно, первая производная от мгновенной скорости
Ускорение показывает, как быстро изменяется скорость тела. В случае прямолинейного движения, направления векторов скорости и ускорения совпадают. В случае же криволинейного движения, вектор ускорения можно разложить на две составляющие: ускорение тангенциальное, и ускорение нормальное.
Тангенциальное ускорение показывает, как быстро изменяется скорость тела по модулю и направлено по касательной к траектории
Нормальное же ускорение характеризует быстроту изменения скорости по направлению. Векторы нормального и тангенциального ускорения взаимно перпендикулярны, а вектор нормального ускорения направлен к центру окружности, по которой движется точка.
Здесь R – радиус окружности, по которой движется тело.
Закон равноускоренного движения
Рассмотрим далее закон равноускоренного движения, то есть движения с постоянным ускорением. Будем рассматривать простейший случай, когда тело движется вдоль оси x.
Здесь – x нулевое- начальная координата. v нулевое – начальная скорость. Продифференцируем по времени, и получим скорость
Производная по скорости от времени даст значение ускорения a, которое является константой.
Пример решения задачи
Теперь, когда мы рассмотрели физические основы кинематики, пора закрепить знания на практике и решить какую-нибудь задачу. Причем, чем быстрее, тем лучше.
Кстати! Для всех наших читателей сейчас действует скидка 10% на любой вид работы.
Решим такую задачу: точка движется по окружности радиусом 4 метра. Закон ее движения выражается уравнением S=A+Bt^2. А=8м, В=-2м/с^2. В какой момент времени нормальное ускорение точки равно 9 м/с^2? Найти скорость, тангенциальное и полное ускорение точки для этого момента времени.
Решение: мы знаем, что для того, чтобы найти скорость нужно взять первую производную по времени от закона движения, а нормальное ускорение равняется частному квадрата скорости и радиуса окружности, по которой точка движется. Вооружившись этими знаниями, найдем искомые величины.

Нужна помощь в решении задач? Профессиональный студенческий сервис готов оказать ее.
Содержание:
Основная задача механики – описание движения тел, т. е. выяснение закона (уравнения) их движения. Как отмечал А. Эйнштейн, наиболее фундаментальная проблема, остававшаяся нерешенной на протяжении тысячелетий, – это проблема движения. Собственно, учение о движении стало наукой лишь со времен Галилео Галилея и Исаака Ньютона.
Кинематика, изучает конкретные механические та их взаимодействия с другими телами. Она фактически объединяет простейшие пространственно-временные зависимости, в частности изменение координат тела со временем (как функцию времени).
Поэтому кинематику часто называют геометрией движения.
Кинематика изучает механические движения тел без учета их взаимодействия с другими телами.
Кинематика
Физика изучает разнообразные явления и процессы, происходящие вокруг нас. Как вам известно, в зависимости от их природы различают механические, тепловые, электрические, магнитные, световые и другие физические явления. Раздел физики, который объясняет движение и взаимодействие тел, называется механикой.
Слово «механика» впервые ввел Аристотель. Оно означает «машина».
Механика – одна из древнейших наук. Ее возникновение и развитие связано с практическими потребностями человека. Первые труды по механике, в которых рассматривались свойства простых механизмов и машин, появились еще в Древней Греции. Весомый вклад в ее становление сделали такие корифеи науки, как Аристотель (IV в. до н. э.), Архимед (III в. до н. э.), Леонардо да Винчи (XV в.), Галилео Галилей (XVII в.) и др. В завершенном виде как классическая теория она получила обоснование в работе Исаака Ньютона «Математические начала натуральной философии» (1687 г.). Современная механика, в основе которой лежит теория относительности, создана в начале XX в. Альбертом Эйнштейном.
Основная задача механики состоит в том, чтобы на основании параметров движения тела: координат, пройденного пути, перемещения, угла поворота, скорости, силы и т. д. – найти закон или уравнение, которое описывает это движение.
Основная задача механики состоит в том, чтобы найти уравнение движения тела с помощью параметров, описывающих это движение.
Т. е. если мы при помощи этих физических величин сможем установить положение тела в любой момент времени, то основная задача механики считается решенной. В зависимости от способов ее решения в механике выделяют три раздела: кинематика, динамика и статика.
Кинематика изучает, как движется тело, не вникая в причины, вызывающие именно такое движение. Поэтому кинематические уравнения состоят лишь из пространственных характеристик механического движения: пройденного пути, изменения координат тела, скорости и т. д. В них нет сил, изменяющих это движение.
В переводе с греческого слово кинематика» (kinematos) означает движение.
Механическое движение и траектория движения
Чаще всего в обыденной жизни мы наблюдаем явление, которое называется механическим движением. Например, автомобиль едет по дороге, в небе «плывут» тучи, ребенок катается на качелях, Луна вращается вокруг Земли и т. д. Во всех этих случаях происходит изменение положения одного тела или его частей относительно других. Чтобы убедиться в этом, необходимо выбрать тело отсчета, относительно которого можно фиксировать положение движущегося тела в любой момент времени. Тело отсчета выбирают произвольно. В приведенных примерах это может быть столб или дерево возле дороги, дом, поверхность Земли и т. д.
Для того чтобы описать движение тела, необходимо точно знать его местоположение в пространстве в произвольный момент времени, т. е. уметь определять изменение положения тела в пространстве относительно других тел с течением времени. Как известно, легче всего это можно сделать с помощью системы координат. Например, зафиксировать «адрес» тела как определенное его положение в пространстве, измерив расстояния или углы в некоторой системе координат.
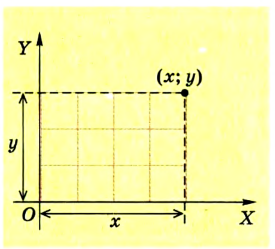
Например, в географии положение тела на земной поверхности задается двумя числами на пересечении меридиана и параллели, которые называются географической долготой и широтой. В математике «адрес» точки чаще всего определяют ее координатами, в частности в прямоугольной (декартовой) системе координат на плоскости – это расстояния х и у (рис. 1.1).
Взаимные изменения положения тела или его частей в пространстве с течением времени называются механическим движением.
Систему координат, как правило, связывают с телом отсчета. В данном случае движущееся тело характеризуется изменением положения в пространстве относительно тела отсчета, т. е. изменением его координат с течением времени.
Математически это можно записать в таком виде: х = x(t); у = y(t).
Для того чтобы определить такое изменение в любой момент времени, с телом отсчета и системой координат необходимо связать средство измерения времени, к примеру секундомер или хронометр. Тогда тело отсчета, связанную с ним систему координат и секундомер как единое целое называют системой отсчета.
Как известно, реальные физические тела имеют форму и объем. Поэтому однозначно задать их положение в пространстве не всегда представляется возможным, поскольку различные их части имеют разные координаты. Однако эту проблему можно упростить, если не брать во внимание размеры тела. Такое возможно лишь при определенных условиях.
Чтобы выяснить их, рассмотрим движение автомобиля. На значительных расстояниях, например на шоссе между Киевом и Харьковом, размерами автомобиля можно пренебречь, поскольку они значительно меньше расстояния между этими городами. Поэтому нет необходимости рассматривать особенности движения каждой части кузова автомобиля – достаточно его представить как движение точки.
Таким образом, для упрощения описания движения тел, когда их размерами при определенных условиях можно пренебречь, применяют понятие материальной точки. Это условное тело, не имеющее размеров, которое определяет положение реального тела в пространстве при помощи координат такой, материальной точки. Ее геометрический образ – невесомая точка, не имеющая размеров. В случае поступательного движения, при котором все точки тела движутся одинаково, любое тело можно считать материальной точкой.
Материальная точка – это физическая модель, при помощи которой представляют реальное тело, пренебрегая его размерами.
Часто кроме движущихся предметов мы наблюдаем тела, пребывающие в состоянии покоя. Однако абсолютно неподвижных тел в природе не существует.

Рассмотрим такой пример. В вагоне на столе стоит бутылка с водой (рис. 1.2). Во время движения поезда разные наблюдатели – пассажир в купе и провожающий на перроне – оценят ее состояние движения по-разному. Для сидящего пассажира она неподвижна, поскольку расстояние от него до бутылки не изменяется. Для провожающего на перроне 16 она движется, потому что изменяет свое положение с течением времени в системе отсчета, связанной с перроном.
Следовательно, состояние покоя является относительным, равно как и состояние движения, поскольку зависит от выбранной системы отсчета. Поэтому в дальнейшем при рассмотрении движения тела мы в первую очередь будем определяться с выбором системы отсчета, потому что от этого нередко зависит сложность уравнений, описывающих данное движение. Правильный выбор системы отсчета ведет к упрощению уравнений движения.
Состояние покоя и состояние движения тела относительны, поскольку зависят от выбора системы отсчета.
Рассмотрим движущееся тело, последовательно фиксируя его положение в определенные моменты времени. Если теперь соединить все точки, в которых побывало тело во время своего движения, то получим мнимую линию, которая называется траекторией движения. Траектория движения может быть видимой (след от самолета на небосклоне, линия от карандаша или ручки при записи в тетради) и невидимой (полет птички, движение теннисного мяча и т. д.).
По форме траектории механическое движение бывает прямолинейным и криволинейным (рис. 1.3).
Положение броуновской частички через определенные промежутки времени.
Рис. 1.3. Различные формы траектории
Траектория прямолинейного движения – прямая линия. Например, падение тела с определенной высоты или движение шарика по наклонному желобу. Во время криволинейного движения тело перемещается по произвольной кривой. Часто реальное движение тел является комбинацией прямолинейного и криволинейного движений. Например, комбинированным есть движение автобуса по маршруту: на разных участках траектория его движения может быть и прямолинейной, и криволинейной.
Поскольку движение тел происходит в определенных системах отсчета, то и траектория рассматривается относительно них. Ведь она отображает во времени последовательные положения тела в некоторой системе отсчета. Поэтому она будет отличаться формой в различных системах отсчета, т. е. траектории движения также относительны. Например, все точки колеса велосипеда относительно его оси описывают окружность, однако в системе отсчета, связанной с землей, эта линия более сложная (рис. 1.4).
Рис. 1.4. Траектория движения точки обода колеса велосипеда
Путь и перемещение
Зная траекторию движения, можно определить путь, пройденный телом: для этого необходимо измерить длину траектории между начальной и конечной точками движения.
Путь – это длина траектории, которую проходит тело или материальная точка за определенный интервал времени. Он обозначается латинской буквой l. Данная физическая величина является скалярной и характеризуется лишь значением длины траектории движения.
В Международной системе единиц (СИ) путь измеряется в метрах (м). На практике используют также другие единицы пути – километр (км), сантиметр (см) и др.
Часто, для того чтобы более полно охарактеризовать движение тела и найти его новое положение, кроме пройденного пути (длины траектории), необходимо указать также направление, в котором двигалось тело. Например, водителю автомобиля приходится ехать по извилистой дороге (рис. 1.5).

Пройденный путь – это длина дороги I, по которой ехал автомобиль. Водитель же совершил перемещение в пространстве из точки А в точку В, которое можно найти, соединив начальное и конечное положение тела прямой линией, указав при этом направление движения.
Следовательно, направленный отрезок прямой, соединяющий начальное положение движущегося тела с конечным, называется перемещением. Перемещение – это векторная величина. Оно обозначается латинской буквой  Его значение характеризуется модулем вектора перемещения
Его значение характеризуется модулем вектора перемещения  или для упрощения записи s.
или для упрощения записи s.
Путь и перемещение могут отличаться своими значениями. Чтобы убедиться в этом, рассмотрим движение велосипедиста по окружности радиуса R= 100 м (рис. 1.6).
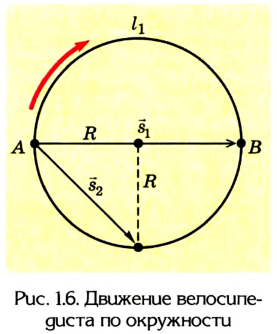
Допустим велосипедист стартует в точке А. Проехав половину окружности, он окажется в точке В. Пройденный им путь равен дуге  а модуль перемещения
а модуль перемещения  = 2R = 200 м.
= 2R = 200 м.
В момент времени, когда велосипедист проедет  окружности, пройденный им путь будет равен
окружности, пройденный им путь будет равен  значение перемещения
значение перемещения  Когда велосипедист сделает полный оборот, пройденный путь будет равен
Когда велосипедист сделает полный оборот, пройденный путь будет равен  модуль перемещения при этом равен нулю
модуль перемещения при этом равен нулю  Таким образом, перемещение может равняться нулю даже в том случае, если тело перед этим осуществляло движение. Это возможно, когда начальное и конечное положения тела совпадают.
Таким образом, перемещение может равняться нулю даже в том случае, если тело перед этим осуществляло движение. Это возможно, когда начальное и конечное положения тела совпадают.
Путь и перемещение имеют также одинаковые значения, когда тело движется прямолинейно лишь в одном направлении.
В рассмотренном нами примере пройденный путь и перемещение разные, отличаются по своему значению. Возникает вопрос: могут ли они совпадать, быть одинаковыми? Можно легко убедиться в том, что такое возможно, если, во-первых, траектория движения будет прямой, во-вторых, движение происходит в одну сторону. Как подтверждение этого, рассмотрим — такой пример.
Допустим, что автомобиль движется прямолинейно по шоссе из пункта А в пункт В, а затем возвращается в пункт С. Расстояние между пунктами 2 км и 4 км соответственно, все они размещены на одной прямой (рис. 1.7).
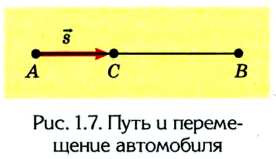
Двигаясь из пункта А в пункт В, автомобиль проходит путь  = 2 км + 4 км = 6 км, и модуль его перемещения равен
= 2 км + 4 км = 6 км, и модуль его перемещения равен  = 6 км. Т. е. в данном случае путь и перемещение совпадают:
= 6 км. Т. е. в данном случае путь и перемещение совпадают:  После того как автомобиль развернулся и приехал в пункт С, его перемещение равно
После того как автомобиль развернулся и приехал в пункт С, его перемещение равно  = 2 км, а пройденный путь составляет
= 2 км, а пройденный путь составляет  = 6 км + 4 км = 10 км, т. е. пройденный путь и перемещение отличаются:
= 6 км + 4 км = 10 км, т. е. пройденный путь и перемещение отличаются: 
Следовательно, пройденный путь и перемещение по своему значению одинаковы лишь в том случае, если тело движется по прямой и не изменяет направление движения.
Равномерное прямолинейное движение
Простейшим видом механического движения является равномерное прямолинейное движение. Это такое движение, при котором тело, двигаясь по прямой, за любые одинаковые интервалы времени совершает одинаковые перемещения. Его траектория – прямая линия. Поэтому его можно описать переменой одной из координат, например х = x(t), если координатная ось совпадает с направлением движения.
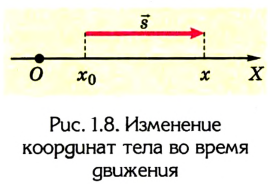
Пусть тело в начальный момент движения имеет координату  (рис. 1.8); через некоторое время, совершив перемещение
(рис. 1.8); через некоторое время, совершив перемещение  оно будет иметь координату х. Перемещение, характеризующее изменение положения тела в пространстве с течением времени, может происходить с разной скоростью. Скорость равномерного движения – это физическая величина, равная отношению перемещения ко времени, в течение которого оно произошло:
оно будет иметь координату х. Перемещение, характеризующее изменение положения тела в пространстве с течением времени, может происходить с разной скоростью. Скорость равномерного движения – это физическая величина, равная отношению перемещения ко времени, в течение которого оно произошло:

Как известно, в СИ скорость
измеряется в метрах за секунду (м/с). 1 м/с – это скорость такого равномерного прямолинейного движения, при которой тело за 1 с совершает перемещение 1 м. На практике используют также другие единицы скорости, например километр в час:
Поскольку перемещение  – векторная величина, а время t -скалярная и всегда больше 0, то скорость также векторная величина, направление которой совпадает с направлением перемещения (рис. 1.9).
– векторная величина, а время t -скалярная и всегда больше 0, то скорость также векторная величина, направление которой совпадает с направлением перемещения (рис. 1.9).

При равномерном движении значение скорости остается постоянным, поскольку за любые равные интервалы времени совершаются равные перемещения.
Как известно, основной задачей механики является определение положения тела в пространстве в произвольный момент времени. Следовательно, чтобы ее решить, надо найти координаты тела либо их изменение во времени: х – x(t). В механике такое уравнение называется уравнением движения. При решении задач с использованием уравнения движения векторные величины, характеризующие движение тела, записывают в проекциях на соответствующую ось. Следовательно, из формулы (1) получаем:

Из рисунков 1.8 и 1.9 понятно, что  Воспользовавшись формулой (2), получим уравнение равномерного прямолинейного движения:
Воспользовавшись формулой (2), получим уравнение равномерного прямолинейного движения:
 поэтому
поэтому 
Уравнения равномерного прямолинейного движения:

Рассмотрим теперь различные случаи равномерного прямолинейного движения (рис. 1.10).
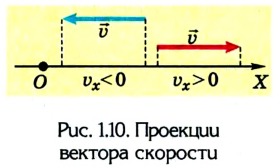
Из рисунка следует, что если направление движения тела совпадает с направлением координатной оси, то  > 0 и координата тела с течением времени возрастает:
> 0 и координата тела с течением времени возрастает:  где v – модуль скорости.
где v – модуль скорости.
Если же направление движения тела противоположно направлению координатной оси, то  < 0 и координата с течением времени уменьшается:
< 0 и координата с течением времени уменьшается: 
Как решать задачи кинематики
Решение любой физической задачи в определенной степени можно условно разделить на три этапа: физический, математический и анализ решения.
На физическом этапе:
- ✓ анализируют условие задачи и описание физической ситуации, заданной условием;
- ✓ выясняют физическую модель явления, лежащего в основе задачи;
- ✓ физическую модель явления представляют в графической форме (рисунки, чертежи, схемы, графики и т. д.);
- ✓ сокращенно записывают условия задачи в систематизированном виде.
На математическом этапе:
- ✓ предлагают математическую модель задачи, составляют общие уравнения, описывающие физические явления, представленные в условии задачи;
- ✓ определяют конкретные условия и параметры, при которых происходит данное явление;
- ✓ конкретизируют общие уравнения в виде частных решений аналитическим, графическим или числовым способом, производят вычисления.
- На этапе анализа решения:
- ✓ производят проверку единиц физических величин и находят значения искомых величин;
- ✓ анализируют результаты, их достоверность и правдоподобность;
- ✓ ищут иные методы решения задачи и выбирают наиболее рациональный из них.
В ходе решения задач кинематики главное состоит в том, чтобы за заданными параметрами движения (координаты, перемещение, скорость и др.) записать уравнение движения. Или наоборот, если уравнение движения известно, ищут физические величины, которые его описывают.
Решение задач кинематики подчинено определенной последовательности умственных действий, так называемому алгоритму, при помощи которого поиск решения задачи значительно облегчается. Представим его как последовательность шагов в ходе решения задачи.
- Шаг 1. В соответствии с условием задачи выберите систему отсчета. Определите начальные значения координат, связав их с телом отсчета.
- Шаг 2. Выясните характер движения (равномерное, неравномерное) и вид траектории (прямолинейная, криволинейная).
- Шаг 3. Сделайте рисунок, иллюстрирующий условие задачи. Свяжите рисунок с выбранной системой отсчета, обозначьте на нем векторные физические величины.
- Шаг 4. Отобразите проекции перемещения, скорости, других векторных величин и запишите уравнение движения тела в общем виде. При необходимости составьте дополнительные уравнения, которые объединяют эти кинематические величины.
- Шаг 5. Решите уравнения относительно искомых величин. Определите их значения, оцените достоверность результата.
- Шаг 6. Проанализируйте полученный ответ. Если он противоречит смыслу задачи, начните поиск иного решения.
- Шаг 7. Произведите поиск иных возможных путей решения задачи. Оцените, какое из решений наиболее рационально.
Задача №1
Из пунктов А и В, расстояние между которыми 80 км, одновременно начали движение навстречу друг другу два велосипедиста. Первый ехал со скоростью 5 м/с, второй -3 м/с. Определите:
- 1) через какое время они встретятся и где это произойдет;
- 2) какой путь они пройдут до момента встречи и какое совершат перемещение;
- 3) через какое время от начала движения расстояние между ними будет 20 км.
Решение
1. Выберем такую систему отсчета, начало координат которой совпадает с пунктом А. В общем виде уравнение движения тела имеет такой вид:  Запишем его для каждого велосипедиста отдельно. Поскольку у первого велосипедиста начальная координата
Запишем его для каждого велосипедиста отдельно. Поскольку у первого велосипедиста начальная координата  = 0, проекция скорости
= 0, проекция скорости  а ее модуль по условию задачи равен 5 м/с, то уравнение его движения будет иметь вид:
а ее модуль по условию задачи равен 5 м/с, то уравнение его движения будет иметь вид: 
У второго велосипедиста  = 80 км,
= 80 км,  = 3 м/с, следовательно,
= 3 м/с, следовательно,  =80000- -3t.
=80000- -3t.
Вследствие движения координаты обоих велосипедистов с течением времени изменяются: у первого она возрастает, у второго – уменьшается. В момент их встречи координаты обоих велосипедистов равны:  Подставив в это равенство соответствующие уравнения движения, получим уравнение с одним неизвестным:
Подставив в это равенство соответствующие уравнения движения, получим уравнение с одним неизвестным:
5t = 80 000 – 3t; St = 80 000; отсюда t = 10 000 с = 2,8 ч. Таким образом, велосипедисты встретятся через 2,8 часа.
Место их встречи определяют координаты  которые можно найти из уравнения движения каждого велосипедиста, подставив в него время t = 10 000 с:
которые можно найти из уравнения движения каждого велосипедиста, подставив в него время t = 10 000 с:
- а)
 = 5t = 5 м/с • 10 000 с = 50 000 м = 50 км;
= 5t = 5 м/с • 10 000 с = 50 000 м = 50 км; - б) = 80 000 – 3t = 80 000 м – 3 м/с • 10 000 с = 50 000 м = 50 км.
 = 5t = 5 м/с • 10 000 с = 50 000 м = 50 км;
= 5t = 5 м/с • 10 000 с = 50 000 м = 50 км; = 80 000 – 3t = 80 000 м – 3 м/с • 10 000 с = 50 000 м = 50 км.
= 80 000 – 3t = 80 000 м – 3 м/с • 10 000 с = 50 000 м = 50 км.Задача №2
Поскольку велосипедисты по условию задачи ехали прямолинейно и не изменяли направления движения, то пройденный ими путь равен модулю перемещения (или его проекции):
 5 м/с • 10 000 c = 50 000 м = 50 км;
5 м/с • 10 000 c = 50 000 м = 50 км;
 = 50 000 м,
= 50 000 м,  = 80 000 m;
= 80 000 m;  = 30 km.
= 30 km.
Или  = 3 м/с • 10 000 c = 30 000 м = 30 км.
= 3 м/с • 10 000 c = 30 000 м = 30 км.
3. Чтобы найти время, когда расстояние между велосипедистами будет равно 20 км, достаточно записать равенство  = 20 км или
= 20 км или  = 20 км и подставить в него соответствующие уравнения движения велосипедистов.
= 20 км и подставить в него соответствующие уравнения движения велосипедистов.
5t – 80 000 + 3t = 20 000; 8t = 100 000; t = 12 500 с = 3,5 ч.
80 000 – 3t – 5t = 20 000; 8t = 60 000; t = 7500 с = 2,1 ч.
Почему получено два разных ответа? Внимательно проанализировав условие задачи, заметим, что на расстоянии 20 км друг от друга велосипедисты будут дважды – когда едут навстречу друг другу (2,1 ч) и когда разъезжаются после встречи, продолжая движение (3,5 ч).
Графики равномерного прямолинейного движения
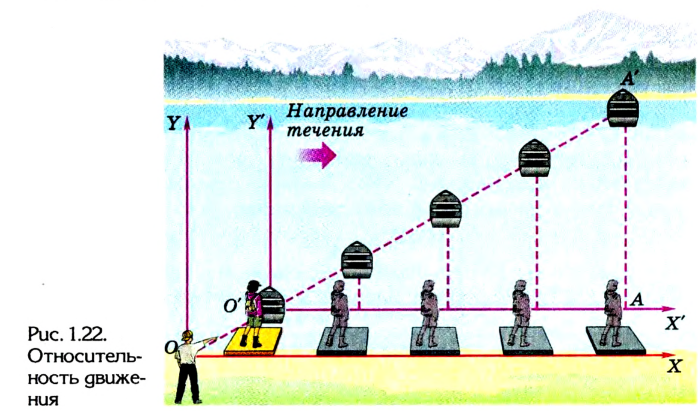
Для того чтобы лучше усвоить особенности изменений параметров равномерного движения (координат, пути, перемещения, скорости) с течением времени, рассмотрим соответствующие графические зависимости, следующие из уравнения равномерного прямолинейного движения.
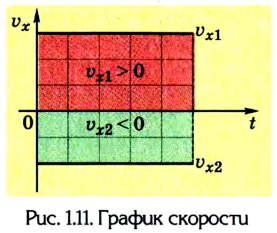
1. График скорости v = u(t). Как известно, скорость тела при равномерном прямолинейном движении с течением времени не изменяется, т. е. v = const. Поэтому график скорости – это прямая, параллельная оси времени t, которая находится над ней, если проекция скорости положительна (рис. 1.11), или под ней, если она отрицательна.
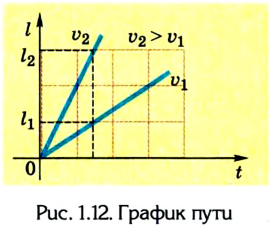
2. График пути l = l(t). Из формулы пути l = vt следует, что между пройденным путем и временем существует прямо пропорциональная зависимость. Графически она отображается прямой, проходящей через начало координат (ведь длина пути не может иметь отрицательных значений). В зависимости от значения скорости наклон графика будет разным (рис. 1.12): чем больше скорость, тем круче прямая.
3. График проекции перемещения  Поскольку проекция перемещения может иметь как положительные, так и отрицательные значения, график проекции перемещения (рис. 1.13) может, соответственно, вздыматься вверх (проекция перемещения положительна) либо устремляться вниз (проекция перемещения отрицательна).
Поскольку проекция перемещения может иметь как положительные, так и отрицательные значения, график проекции перемещения (рис. 1.13) может, соответственно, вздыматься вверх (проекция перемещения положительна) либо устремляться вниз (проекция перемещения отрицательна).
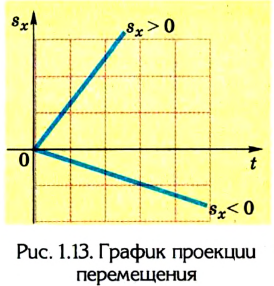
График проекции перемещения всегда проходит через начало координат. Угол наклона прямой, как и в случае графика пути, зависит от значения скорости: чем она больше, тем круче график проекции перемещения.
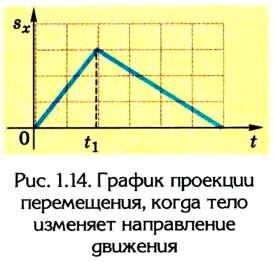
Если тело изменяет направление движения – сначала движется в одну сторону, а затем возвращается назад, то график проекции перемещения принимает вид, изображенный на рисунке 1.14 (в момент времени  тело изменило направление движения).
тело изменило направление движения).
4. График движения тела х = x(t) характеризует изменение координат тела с течением времени. Из уравнения движения  следует, что он представляет собой линейную функцию и отображается прямой. Эта прямая проходит через начало координат, когда
следует, что он представляет собой линейную функцию и отображается прямой. Эта прямая проходит через начало координат, когда  = 0. Она смещена на
= 0. Она смещена на  , если
, если  (рис. 1.15 и 1.16).
(рис. 1.15 и 1.16).
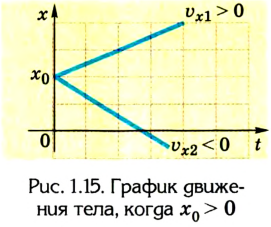
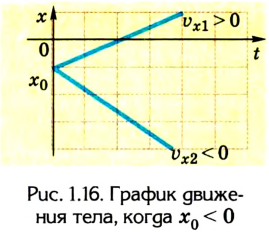
Так как проекция скорости может иметь положительные и отрицательные значения (направление вектора скорости может совпадать или быть противоположным выбранному направлению оси), то график может подниматься вверх ( > 0) либо устремляться вниз (
> 0) либо устремляться вниз ( < 0). На представленных графиках отображена зависимость координат тел, которые в начальный момент времени находились в одной точке:
< 0). На представленных графиках отображена зависимость координат тел, которые в начальный момент времени находились в одной точке:  > 0 (рис. 1.15) либо
> 0 (рис. 1.15) либо  < 0 (рис. 1.16), но двигались в противоположных направлениях (
< 0 (рис. 1.16), но двигались в противоположных направлениях ( > 0 и
> 0 и  < 0).
< 0).
Таким образом, при помощи графиков можно выяснить характер движения тел и изменения соответствующих величин с течением времени t.
Задача №3
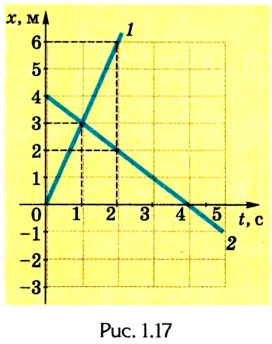
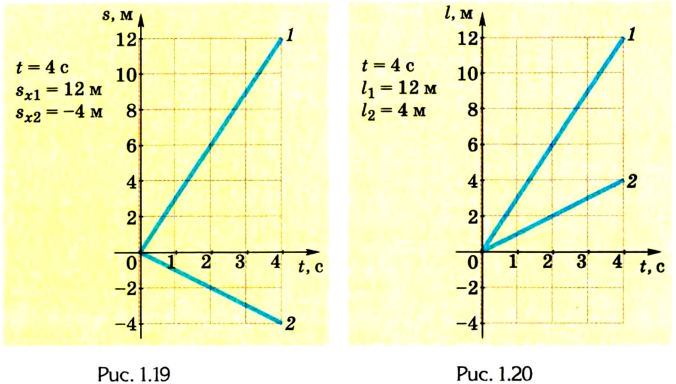
На основании графика движения (рис. 1.17):
- 1) определить скорость движения тел;
- 2) составить уравнения движения обоих тел;
- 3) найти перемещение тел за 4 с;
- 4) определить время и место их встречи;
- 5) найти расстояние между телами через 2 с после начала движения;
- 6) построить графики скорости, проекции перемещения и пути.
Решение
1. Скорость тела определяется на основании формулы
Время движения выбираем произвольно, руководствуясь простотой расчетов. Например, используем значение t = 2 с. Тогда тело 1 через 2 с будет иметь координату 6 м; его начальная координата  = 0. Следовательно, скорость тела 1 равна:
= 0. Следовательно, скорость тела 1 равна:

У тела 2 начальная координата равна  = 4 м, а через 2 с она равна 2 м. Следовательно, скорость тела 2 равна:
= 4 м, а через 2 с она равна 2 м. Следовательно, скорость тела 2 равна:

2. Уравнение движения для обоих тел будет иметь такой вид:

3. Перемещение тел за время t = 4 с равно:

4. В момент встречи тел их координаты будут одинаковы, т. е. это точка пересечения графиков. При помощи перпендикуляра, проведенного к оси координат, можно установить координату места встречи – она равна 3 м. Для определения времени встречи необходимо опустить перпендикуляр на ось времени t; получим t = 1 с.
5. Согласно графикам движения тел через 2 с тело 1 имеет координату
 = 6 м, а тело 2 – координату
= 6 м, а тело 2 – координату  = 2 м. Следовательно, расстояние между телами равно: l =
= 2 м. Следовательно, расстояние между телами равно: l =  = 4 (м).
= 4 (м).
6. Используя предыдущие данные решения задачи, построим соответствующие графики (рис. 1.18-1.20).

Относительность движения. Закон сложения скоростей
Для того чтобы описать механическое движение и определить его параметры – траекторию, перемещение, пройденный путь, скорость и др., следует прежде всего выбрать систему отсчета и проанализировать движение тела или материальной точки относительно тела отсчета, выбранного произвольно. В природе существует множество систем отсчета и описание движения может одновременно производиться в каждой из них. Например, лодка, плывущая по реке, движется относительно ее берегов, относительно теплохода, который плывет рядом, относительно пешеходов, стоящих на берегу, и т. д.
Чаще всего систему отсчета связывают с телом, которое в данной ситуации считается неподвижным: с землей, берегом реки, населенным пунктом, столбом на обочине дороги и др. Такая система отсчета считается неподвижной.
С телами, которые движутся в неподвижных системах отсчета равномерно и прямолинейно, связывают подвижные системы отсчета. Следует учитывать, что удачный выбор системы отсчета намного упрощает решение задачи.
Рассмотрим движение какого-либо тела, например лодки, плывущей по реке, в различных системах отсчета (рис. 1.22).
Пусть лодка пересекает реку перпендикулярно к ее течению. За движением лодки следят два наблюдателя – один на берегу реки (неподвижная система отсчета XOY), другой с плота, который перемещается относительно берега со скоростью течения реки (подвижная система отсчета X’O’Y’).
Первый наблюдатель будет видеть перемещение лодки по прямой ОА’. Второй наблюдатель, находясь в подвижной системе отсчета, увидит иную картину: лодка будет удаляться от него по прямой, перпендикулярно к течению, и когда она достигнет противоположного берега в т. А’, плот будет находится точно напротив нее в т. А.

Таким образом, относительно подвижной системы отсчета лодка совершает перемещение  (рис. 1.23), относительно неподвижной системы отсчета она совершает перемещение
(рис. 1.23), относительно неподвижной системы отсчета она совершает перемещение  Сама же подвижная система отсчета за это время совершила перемещение
Сама же подвижная система отсчета за это время совершила перемещение  Согласно правилам сложения векторов:
Согласно правилам сложения векторов:  Следовательно, сложение перемещений относительно различных систем отсчета выполняется в соответствии с правилами сложения векторов.
Следовательно, сложение перемещений относительно различных систем отсчета выполняется в соответствии с правилами сложения векторов.
Разделив каждый член уравнения на время движения t, одинаковое для подвижной и неподвижной систем отсчета, получим:
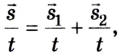

Уравнение (1) называется законом сложения скоростей: скорость тела в неподвижной системе отсчета равна векторной сумме скорости тела в подвижной системе отсчета и скорости самой подвижной системы отсчета относительно неподвижной. Сложение скоростей в данном случае также выполняется согласно правилам сложения векторов.
Движение тела в подвижной системе отсчета называется относительным, движение самой подвижной системы отсчета относительно неподвижной является переносным. Таким образом, механическое движение тел относительно различных систем отсчета может быть представлено независимыми движениями: а) относительным движением тела в подвижной системе отсчета; б) переносным движением подвижной системы отсчета относительно неподвижной. В соответствии с данным утверждением закон сложения скоростей приобретает вид:

т. е. скорость тела в неподвижной системе отсчета равна геометрической сумме относительной и переносной скоростей.
Скорость тела в неподвижной системе отсчета иногда называют абсолютной.
- Заказать решение задач по физике
Задача №4
Моторная лодка плывет по реке от одного поселка к другому, расстояние между которыми 30 км. Скорость лодки в стоячей воде 20 км/ч, а скорость течения реки относительно берегов 10 км/ч. За какое время лодка преодолеет расстояние между поселками, двигаясь сначала по течению, а затем, возвращаясь назад, против него?
Дано:

Решение
Согласно закону сложения скоростей
В скалярной форме, учитывая знаки проекции скоростей, получим:
 (по течению),
(по течению),
 (против течения).
(против течения).
Следовательно, время движения лодки между поселками по течению:
Время движения лодки против течения:

Ответ: 
Равноускоренное движение. Ускорение
При равномерном прямолинейном движении скорость тела в различных точках траектории остается неизменной. Однако в реальной жизни мы чаще имеем дело с неравномерным движением, когда скорость тела может изменяться и по своему значению, и по направлению. Если за любые равные интервалы времени скорость тела изменяется одинаково либо по значению, либо по направлению, то такое движение называется равноускоренным.
Изменение значения скорости может происходить довольно быстро (например, движение пули в ружье, старт ракеты, разбег самолета и т. п.) или сравнительно медленно (начало движения поезда, торможение автомобиля). При этом также следует учитывать, что скорость как векторная величина может изменять свое направление, которое тоже характеризует неравномерность движения. В физике для оценивания быстроты изменения скорости движения применяют физическую величину, которая называется ускорением.
Для характеристики неравномерного движения используют понятие ускорения, которое определяет, насколько быстро I изменяется скорость движения.
Ускорение – это векторная физическая величина, равная отношению изменения скорости тела к интервалу времени, в течение которого это изменение произошло:

где  – начальная скорость тела,
– начальная скорость тела,  – его конечная скорость, t -время, в течение которого произошло изменение скорости.
– его конечная скорость, t -время, в течение которого произошло изменение скорости.
Из определения равноускоренного движения следует, что его ускорение является постоянной величиной ( = const), потому что за равные интервалы времени скорость изменяется одинаково. В СИ ускорение измеряется в метрах в секунду в квадрате (
= const), потому что за равные интервалы времени скорость изменяется одинаково. В СИ ускорение измеряется в метрах в секунду в квадрате ( ). 1
). 1  – это ускорение такого движения, при котором тело за 1 с изменяет свою скорость на 1 м/с.
– это ускорение такого движения, при котором тело за 1 с изменяет свою скорость на 1 м/с.
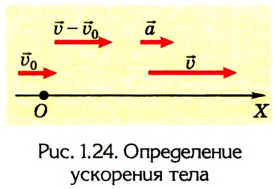
Значение ускорения определяют, учитывая векторные свойства данной физической величины. В частности, в проекциях на ось ОХ (рис. 1.24) формула ускорения приобретает вид:

В случае, когда  > 0, скорость движения увеличивается, ведь
> 0, скорость движения увеличивается, ведь  –
–  > 0, вектор
> 0, вектор  совпадает с направлением движения.
совпадает с направлением движения.
Если скорость тела со временем уменьшается  то вектор ускорения будет противоположным к направлению движения (рис. 1.25).
то вектор ускорения будет противоположным к направлению движения (рис. 1.25).
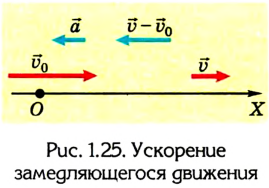
В данном случае в соответствии с выбранным направлением координатной оси ОХ проекция ускорения будет отрицательной 
Вместе с тем знак проекции ускорения не определяет характер движения – оно ускоряющееся или замедляющееся, в зависимости от выбора системы отсчета. В этом легко убедиться, если рассмотреть случай, когда оба тела движутся в противоположных направлениях. Тогда одно из тел имеет положительную проекцию ускорения  а другое – отрицательную
а другое – отрицательную  хотя оба движутся равноускоренно.
хотя оба движутся равноускоренно.
Из формул (1) и (2) можно получить кинематическое уравнение скорости для равноускоренного движения:

или в проекциях на ось ОХ:

Выведем теперь кинематическое уравнение перемещения для равноускоренного движения. Учтем, что скорость во время такого движения постоянно изменяется, например сначала она равна  а в конце движения она будет v. Поэтому в формуле перемещения можно воспользоваться понятием средней скорости (известное из курса физики 8-го класса):
а в конце движения она будет v. Поэтому в формуле перемещения можно воспользоваться понятием средней скорости (известное из курса физики 8-го класса): 
Подставив в данную формулу уравнение (3) и произведя некоторые преобразования, получим:

или в проекциях на ось ОХ:

Если начальная скорость тела равна 0  то кинематическое уравнение перемещения приобретает вид:
то кинематическое уравнение перемещения приобретает вид:

или в проекциях на ось ОХ:

Для прямолинейного движения, учитывая, что  получим кинематическое уравнение для координат или уравнение равноускоренного движения:
получим кинематическое уравнение для координат или уравнение равноускоренного движения:

или для случая, когда  = 0:
= 0:

Следует помнить, что в ходе решения задач необходимо учитывать знаки проекций в соответствующих уравнениях.
При определении проекции перемещения не всегда известно время, в течение которого происходило движение. Тогда можно воспользоваться иным уравнением. Чтобы его получить, подставим в кинематическое уравнение  выражение
выражение  Сделав некоторые математические преобразования (предлагаем произвести их самостоятельно), получим формулу:
Сделав некоторые математические преобразования (предлагаем произвести их самостоятельно), получим формулу:

Отсюда  Если
Если 
Задача №5
Водитель начинает тормозить в тот момент, когда спидометр автомобиля фиксирует скорость 72 км/ч. Через какое время автомобиль остановится, если он двигался с ускорением  Каким был его тормозной путь?
Каким был его тормозной путь?
Дано:
t -?
l – ?
Решение
По условию задачи спидометр показывает начальную скорость автомобиля  Движение автомобиля во время торможения – замедляющееся, поэтому вектор ускорения направлен в противоположную сторону от направления движения. Конечная скорость автомобиля v = 0 (он остановился).
Движение автомобиля во время торможения – замедляющееся, поэтому вектор ускорения направлен в противоположную сторону от направления движения. Конечная скорость автомобиля v = 0 (он остановился).
 следовательно, 0 =
следовательно, 0 =  – at, отсюда
– at, отсюда

Ответ: автомобиль остановился через 10 с, проехав 100 м.
Задача №6
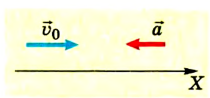
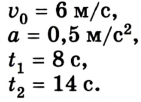
Шарик толкнули по наклонному желобу вверх со скоростью 6 м/с. Шарик движется с ускорением 0,5  Найти скорость шарика через 8 с и 14 с после начала движения.
Найти скорость шарика через 8 с и 14 с после начала движения.
Дано:

Решение
Направим ось ОХ вдоль желоба (см. рис.).
Учитывая знаки проекций скорости и ускорения, имеем 
Отсюда уравнение для  имеет такой вид:
имеет такой вид:
 Для
Для  имеем:
имеем:
 Анализируя полученные результаты, можно сделать вывод, что в первом случае шарик двигался вверх (
Анализируя полученные результаты, можно сделать вывод, что в первом случае шарик двигался вверх ( > 0), а во втором случае он скатывался вниз, поскольку
> 0), а во втором случае он скатывался вниз, поскольку  < 0.
< 0.
Ответ: = 2 м/с,  = -1 м/с.
= -1 м/с.
Графики равноускоренного движения
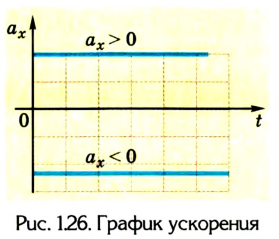
1. График ускорения а = a(t). Как известно, при равноускоренном движении ускорение является величиной постоянной (а = const). Поэтому зависимость проекции ускорения от времени отображает прямая, параллельная оси времени t. В зависимости от значения проекции ускорения -положительная она или отрицательная – данная прямая размещена над осью или под ней (рис. 1.26).
2. График скорости и = v(t).
Линейная зависимость скорости от времени обусловлена математическим видом ее кинематического уравнения  В зависимости от значений проекции ускорения
В зависимости от значений проекции ускорения  и начальной скорости
и начальной скорости  график будет иметь различный вид (рис. 1.27), в частности:
график будет иметь различный вид (рис. 1.27), в частности:

Если  = 0, то прямая выходит из начала координат и в зависимости от значения проекции ускорения будет либо устремляться вверх (
= 0, то прямая выходит из начала координат и в зависимости от значения проекции ускорения будет либо устремляться вверх ( > 0), либо падать вниз (
> 0), либо падать вниз ( < 0). Наклон прямых зависит от значения проекции ускорения: чем больше ускорение, тем круче график.
< 0). Наклон прямых зависит от значения проекции ускорения: чем больше ускорение, тем круче график.
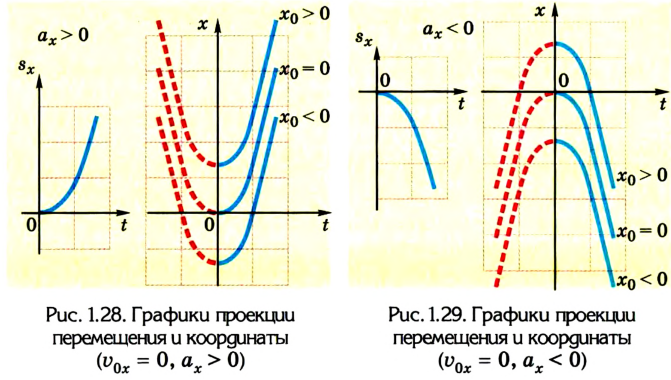
3. График проекции перемещения  и координаты х = x(t).
и координаты х = x(t).
Кинематические уравнения перемещения и координат представляют собой квадратные уравнения вида  Поэтому графиками зависимости проекции перемещения и координаты от времени являются параболы. Например, если
Поэтому графиками зависимости проекции перемещения и координаты от времени являются параболы. Например, если  = 0 и
= 0 и  > 0, то график имеет вид, представленный на рисунке 1.28. На графике зависимости координаты от времени, если
> 0, то график имеет вид, представленный на рисунке 1.28. На графике зависимости координаты от времени, если  вершина параболы смещается по оси ординат вверх или вниз в зависимости от значения
вершина параболы смещается по оси ординат вверх или вниз в зависимости от значения 
Если  = 0 и
= 0 и  < 0, то ветки параболы опущены вниз (рис. 1.29) и смещение вершины параболы вверх или вниз по оси ординат также зависит от значения
< 0, то ветки параболы опущены вниз (рис. 1.29) и смещение вершины параболы вверх или вниз по оси ординат также зависит от значения 
Если  и
и  (рис. 1.30), то вершина параболы смещается в точку, координаты которой определяются из соотношений:
(рис. 1.30), то вершина параболы смещается в точку, координаты которой определяются из соотношений:

Представленные на рисунке 1.30 графики отображают такие параметры равноускоренного движения:
1)
2) 
Задача №7
Прямолинейное движение тела описывается уравнением  Определить:
Определить:
- 1) характер движения тела и его скорость через 3 с от начала движения;
- 2) в какой момент времени после начала его отсчета тело изменило направление движения на противоположное;
- 3) в какой момент времени после начала его отсчета тело вернется в начальную точку;
- 4) перемещение и пройденный путь через 2 с.
Решение
1. Для определения скорости тела в любой момент времени необходимо составить уравнение скорости  Сравнив общее уравнение равноускоренного движения
Сравнив общее уравнение равноускоренного движения  с уравнением из условия задачи
с уравнением из условия задачи  найдем параметры движения:
найдем параметры движения: 
При таких условиях уравнение скорости для данного движения приобретает вид:  = 6 – 8t. Из этого уравнения определим проекцию скорости через 3 с от начала движения:
= 6 – 8t. Из этого уравнения определим проекцию скорости через 3 с от начала движения:

Следовательно, скорость движения равна 18 м/с. Отрицательное ее значение свидетельствует о том, что направление скорости противоположно выбранному направлению координатной оси. Движение тела замедляется  поэтому в некоторый момент оно остановится
поэтому в некоторый момент оно остановится  и может изменить направление движения.
и может изменить направление движения.
2. Для определения момента изменения направления движения надо уравнение скорости приравнять к 0 и решить его относительно t:

3. Тело вернется в начальную точку, когда его координата примет значение начальной координаты, т. е. х =  = 4 м. Подставив это значение в уравнение движения и решив его относительно t, получим:
= 4 м. Подставив это значение в уравнение движения и решив его относительно t, получим:

Следовательно, тело имело координату в начале движения  и через 1,5 с после начала движения.
и через 1,5 с после начала движения.
4. Для определения перемещения через 2 с после начала движения составим уравнение проекции перемещения
 в соответствии с параметрами данного движения:
в соответствии с параметрами данного движения:
 Отсюда
Отсюда  = 12 м – 16 м = -4 м.
= 12 м – 16 м = -4 м.
Для определения пройденного пути следует учесть, что тело меняло направление движения, поэтому  где
где  и
и  – перемещение тела до и после изменения направления движения. Учитывая, что время движения до изменения направления равно 0,75 с, после изменения направления t = 2 с – 0,75 с = 1,25 с, имеем:
– перемещение тела до и после изменения направления движения. Учитывая, что время движения до изменения направления равно 0,75 с, после изменения направления t = 2 с – 0,75 с = 1,25 с, имеем:

Таким образом, пройденный путь равен:
l = 2,25 м + 6,25 м = 8,5 м.
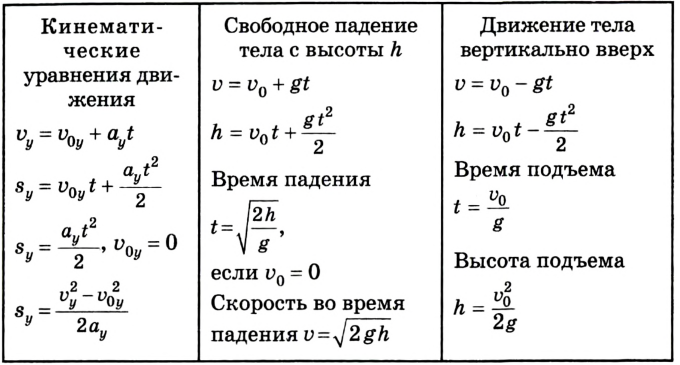
Свободное падение тел. Ускорение свободного падения
Многочисленные наблюдения и опыты убеждают нас в том, что все тела падают на землю вследствие притяжения к ней. Если тело бросить вертикально вверх, оно все равно упадет на землю: вначале его скорость будет уменьшаться, а затем оно начнет падать вниз со всевозрастающей скоростью.
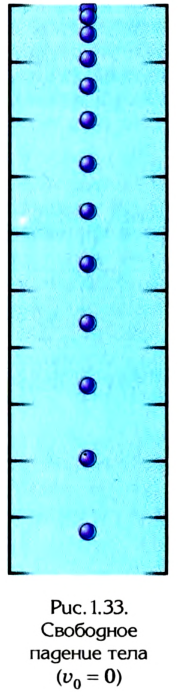
Анализ характера движения падающего тела (рис. 1.33) показывает, что данное движение равноускоренное, т. е. за равные интервалы времени оно проходит разные расстояния, которые с течением времени пропорционально увеличиваются.
Долгое время считалось, что различным телам Земля придает разное ускорение, и поэтому они падают на нее неодинаково – одни быстрее, другие медленнее. Это, как оказалось впоследствии, ложное представление подтверждал жизненный опыт: легкое перышко, падающее вместе со свинцовым шариком, достигало земли гораздо позже его. Этот, на первый взгляд, очевидный факт вынуждал многих людей искаженно воспринимать действительное протекание явления свободного падения тел. Если повторить данный опыт в условиях, когда на тело не действуют другие факторы, кроме земного притяжения, например в цилиндрической колбе, из которой откачан воздух, то результат будет иным: оба тела упадут одновременно. Этот опыт впервые выполнил И. Ньютон. Он подтвердил, что в условиях свободного падения, т. е. когда на тело действует только сила тяжести, все тела, независимо от их массы и формы, падают одинаково. Следовательно, свободное падение – это равноускоренное движение тел под действием силы тяжести при отсутствии посторонних влияний на них (сопротивление воздуха, электромагнитное взаимодействие и др.). Свободное падение происходит не только на Земле вследствие притяжения к ней всех тел. Оно происходит на всех планетах, Солнце, Луне и др. Однако падение тела ускорение свободного падения у них, конечно же, разное.
Выдающийся итальянский физик Галилео Галилей, изучая движение тел по наклонной плоскости, установил, что шары одинакового диаметра, изготовленные из дерева, железа, слоновой кости и других материалов, следовательно, разной массы, имеют одно и то же ускорение. Увеличивая угол наклона, он пришел к выводу, что значение ускорения при этом растет, но остается одинаковым для всех тел, независимо от их массы. Если увеличивать угол наклона плоскости до 90°, т. е. до ее вертикального положения, выводы в отношении ускорения тел останутся теми же.
Ведь при этом не появилось каких-либо дополнительных факторов, влияющих на характер движения тел. Для подтверждения данного вывода ученый провел известный опыт с пушечным ядром и пулей от мушкета, бросая их с Пизанской башни (рис. 1.34): оба тела достигали земли одновременно. Таким образом Г. Галилей экспериментально установил, что ускорение свободного падения не зависит от массы тел и является постоянной величиной для каждой планеты.
Благодаря многочисленным измерениям ускорения свободного падения для Земли определено его среднее значение у поверхности:  Установлено, что оно зависит от географической широты местности. Например, на экваторе
Установлено, что оно зависит от географической широты местности. Например, на экваторе  а на полюсах
а на полюсах 
Поскольку свободное падение и движение тела, брошенного вертикально вверх (как частный случай свободного падения), являются равноускоренным движением, все его кинематические уравнения применимы и для данного случая. Вместе с тем в соответствующих уравнениях надо учитывать направление движения.
Выберем ось ОУ для вывода кинематических уравнений свободного падения тела (рис. 1.35).

Учитывая знаки проекций векторных величин на ось ОУ, а также то, что проекцию вертикального перемещения (высоту) обозначают
буквой h, получим:
Задача №8
Тело брошено вертикально вверх с начальной скоростью 30 м/с (рис. 1.36).
1. Через какое время оно будет на высоте 40 м?
Воспользуемся уравнением движения 
Для упрощения уравнения можно принять  тогда
тогда 
Решив квадратное уравнение, получим два корня
Оба корня удовлетворяют условию задачи. Ведь тело было на высоте 40 м дважды: через 2 с, двигаясь вверх, и через 4 с, падая вниз.
2. Какую скорость имеет тело, пролетая отметку 40 м?
На одной и той же высоте значение скорости тела по модулю одинаково, а по направлению противоположно.
3. На какую максимальную высоту поднимется тело?
В наивысшей точке скорость тела равна 0. Следовательно,
Несложно определить, что все время движения составляет 6 с, общее перемещение тела равно 0, а пройденный путь l = 90 м.
Движение точки по окружности
Ранее мы рассматривали равноускоренное движение, траекторией которого была прямая. При таком движении изменяется значение скорости, а ее направление остается неизменным. В жизни чаще встречаются криволинейные движения (орбитальное движение планет, повороты транспорта нa дороге, карусели и т. п.), во время которых происходят изменения направления скорости движения. Здесь проявляется векторный характер ускорения.

По форме траектории криволинейное движение может быть достаточно разнообразным. Однако его всегда можно представить в виде последовательных участков, состоящих из отрезков прямых и дуг окружностей различного диаметра (рис. 1.37). Т. е. любое криволинейное движение является комбинацией прямолинейного движения и движения тела по окружности.
Рассмотрим равномерное движение материальной точки по окружности. Пусть она равномерно движется по окружности радиуса R и за некоторое время t перемещается из точки А в точку В (рис. 1.38).
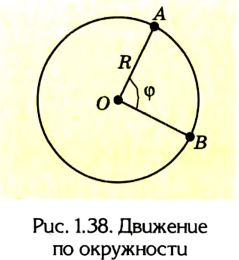
Угол, который при этом описывает радиус, называется угловым перемещением.
Угловое перемещение обозначают греческой буквой  («фи») и в СИ измеряют в радианах (рад). 1 рад равен центральному углу между двумя радиусами, стягивающих дугу, длина которой равна радиусу. Следовательно, за один оборот (360°) материальная точка осуществляет угловое перемещение
(«фи») и в СИ измеряют в радианах (рад). 1 рад равен центральному углу между двумя радиусами, стягивающих дугу, длина которой равна радиусу. Следовательно, за один оборот (360°) материальная точка осуществляет угловое перемещение  рад.
рад.
Движение точки по окружности характеризуют также период вращения и частота вращения. Период вращения – это время, в течение которого материальная точка совершает полный оборот по окружности, т. е. поворот на угол  рад:
рад:
где t – время вращения, N – количество совершенных оборотов. В СИ период вращения Т измеряется в секундах (с). Частота вращения n характеризует количество оборотов тела или материальной точки вокруг центра вращения за 1 секунду:

где N – количество оборотов, совершенных за время t.
В СИ частота вращения измеряется в оборотах за секунду (об/с).
Между частотой и периодом вращения существует взаимообратная зависимость: 
Для определения быстроты движения точки по окружности используют понятие угловой скорости. Это физическая величина, равная отношению углового перемещения  к интервалу времени t, в течение которого данное перемещение происходило:
к интервалу времени t, в течение которого данное перемещение происходило:

В СИ угловая скорость измеряется в радианах за секунду (рад/с). 1 рад/с равен угловой скорости такого равномерного движения точки по окружности, при котором за 1 с совершается угловое перемещение 1 рад.
Поскольку за период Т угловое перемещение  равно
равно  рад, то угловая скорость может быть определена через период и частоту вращения:
рад, то угловая скорость может быть определена через период и частоту вращения:

Равномерное движение материальной точки по окружности характеризуется специфическими кинематическими величинами, благодаря которым его описывают при помощи соответствующих уравнений. Это – угловое перемещение и угловая скорость, период и частота вращения. Наряду с ними применяется и привычное для нас понятие скорости, которое в данном случае называют линейной скоростью.
Во время равномерного движения точки по окружности значение ее линейной скорости остается неизменным  однако направление вектора скорости все время меняется (рис. 1.39).
однако направление вектора скорости все время меняется (рис. 1.39).

Поэтому линейную скорость можно характеризовать как скорость тела в некоторой точке. Она направлена по касательной к дуге в данной точке (точка А и точка В). В этом можно убедиться, приложив к точильному камню стальной нож: искры от него летят по касательной к поверхности камня в том месте, куда поднесли нож.
Линейная скорость тела, которое движется по окружности, все время изменяется по направлению и в любой точке траектории направлена по касательной к дуге этой окружности.
Поскольку в данном случае линейная скорость по модулю не изменяется, то из формулы скорости равномерного движения и  можно найти выражение для линейной скорости вращательного движения:
можно найти выражение для линейной скорости вращательного движения:  Или учитывая, что
Или учитывая, что  получим:
получим: 
Сравнивая формулы линейной скорости  с угловой
с угловой  благодаря несложным преобразованиям, получаем:
благодаря несложным преобразованиям, получаем:

Как уже отмечалось, изменение направления вектора скорости также вызывает ускорение, ведь как векторная величина оно равно  Поэтому даже во время равномерного движения точки по окружности вследствие изменения направления линейной скорости возникает ускорение. Его называют центростремительным, потому что как вектор оно направлено к центру окружности, по которой движется материальная точка. Значение центростремительного ускорения определяют по формуле
Поэтому даже во время равномерного движения точки по окружности вследствие изменения направления линейной скорости возникает ускорение. Его называют центростремительным, потому что как вектор оно направлено к центру окружности, по которой движется материальная точка. Значение центростремительного ускорения определяют по формуле  или принимая во внимание, что
или принимая во внимание, что  получаем
получаем 
Задача №9
Земля делает один оборот вокруг своей оси за 24 ч. Вычислить угловую и линейную скорости вращения точек поверхности Земли, которые находятся на экваторе. Радиус Земли равен 6400 км. Считайте, что ось вращения проходит сквозь полюсы.
Дано:

Решение
Вращение Земли вокруг своей оси можна считать равномерным.
Следовательно,
Ответ: 
Задача №10
Велосипедист едет по дороге со скоростью 10 м/с. Сколько оборотов за секунду делают колеса велосипеда, если они не скользят? Какое центростремительное ускорение точки обода колеса, если его радиус 35 см?
Дано:
v = 10 м/с,
R = 0,35 м.
n – ? а – ?
Решение
Ответ: n = 0,22 об/с, а = 285 
Итоги:
Кинематика изучает механическое движение тел, не рассматривая причин, вызывающих именно такое движение. Описание механического движения в кинематике основывается на выяснении характера изменений координат, перемещений, скорости с течением времени. Для того чтобы описать движение тела, необходимо установить закон (уравнение) изменения во времени координат или скоростей тела относительно других тел. Изменение положения тела в пространстве с течением времени характеризуется перемещением. Это векторная величина, которая определяет не только пройденный путь, но и направление, в котором происходило движение.
Механическое движение по форме траектории может быть прямолинейным или криволинейным, по характеру движения – равномерным или равноускоренным. В зависимости от этого уравнения движения имеют вид:
для равномерного прямолинейного движения

для равноускоренного прямолинейного движения

для равномерного движения по окружности

Механическое движение относительно. Это означает, что траектория, перемещение, пройденный путь, скорость, зависят от выбора системы отсчета. Механическое движение относительно различных систем отсчета может быть представлено двумя независимыми движениями – относительным движением тела в подвижной системе отсчета и переносным движением подвижной системы отсчета относительно неподвижной. Данное утверждение подтверждает закон сложения скоростей -скорость тела в неподвижной системе отсчета равна векторной сумме относительной и переносной скоростей:
Равноускоренное движение характеризует векторная физическая величина, называемая ускорением:  Одним из случаев равноускоренного движения является свободное падение тел, при котором движение тела происходит лишь под действием силы тяжести Земли, исключая постороннее влияние на тела иных факторов (сопротивление воздуха, электромагнитное взаимодействие и др.). Ускорение свободного падения не зависит от массы тела и является постоянной величиной для данной местности. На Земле оно равно приблизительно 9,81
Одним из случаев равноускоренного движения является свободное падение тел, при котором движение тела происходит лишь под действием силы тяжести Земли, исключая постороннее влияние на тела иных факторов (сопротивление воздуха, электромагнитное взаимодействие и др.). Ускорение свободного падения не зависит от массы тела и является постоянной величиной для данной местности. На Земле оно равно приблизительно 9,81  Уравнения движения тел при их свободном падении зависят от выбора системы отсчета:
Уравнения движения тел при их свободном падении зависят от выбора системы отсчета: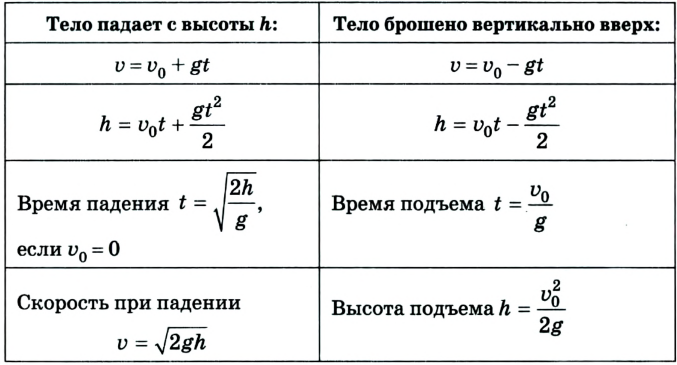
Криволинейное движение можно представить как последовательность участков, состоящих из отрезков прямых и дуг окружностей разного диаметра. Равномерное движение тела или материальной точки по окружности характеризуется угловым перемещением  и угловой скоростью
и угловой скоростью 
Линейная и угловая скорости согласуются между собой в виде соотношения:

При равномерном движении точки по окружности вследствие изменения направления линейной скорости возникает центростремительное ускорение:
- Законы сохранения в физике
- Международная система единиц СИ
- Математика – язык физики
- Законы Ньютона в физике
- Магнитное поле Земли
- Ядерная энергетика в физике
- Динамика в физике
- Статика в физике
2.2.1 Как перевести из км/ч в м/с и т. д?
В задачах часто необходимо переводить из одних единиц измерения в другие:
1 км/ч = (1000 м)/(3600 с) = 5/18 м/с,
1 м/с = 18/5 км/ч,
1 км/с = 1000 м/с,
1 см/с = 0,01 м/с,
1 м/мин = 1/60 м/с.
Например, если  то для того, чтобы перевести в м/с, нужно умножить на 5/18:
то для того, чтобы перевести в м/с, нужно умножить на 5/18:

2.2.2 Как найти скорость тела, если известен закон движения?
Закон равномерного движения имеет вид:

Видим, что в этой формуле скорость стоит коэффициентом перед временем. Поэтому, если в условии задачи дан закон движения, необходимо посмотреть на коэффициент перед t — это и есть скорость.
Например, пусть закон движения имеет вид:  В данном случае коэффициент перед t равен 5, следовательно,
В данном случае коэффициент перед t равен 5, следовательно, 
2.2.3 Как определить скорость по графику координаты от времени?
Закон равномерного движения имеет вид:
Графиком этого закона является прямая линия. Так как  — коэффициент перед t, то является угловым коэффициентом прямой.
— коэффициент перед t, то является угловым коэффициентом прямой.
Для графика 1:

То, что график 1 «поднимается вверх», означает — тело едет в положительном направлении оси Ox.
Для графика 2:

То, что график 2 «опускается вниз», означает — тело едет в отрицательном направлении оси Ox.
Для определения  и
и  выбираем такие точки на графике, в которых можно точно определить значения, как правило, это точки, находящиеся в вершинах клеток.
выбираем такие точки на графике, в которых можно точно определить значения, как правило, это точки, находящиеся в вершинах клеток.
2.2.4 Как найти закон движения, если известны координаты тела в моменты времени  и
и  ?
?
Пусть в момент времени тело находилось в точке с координатой  а в момент времени тело находилось в точке с координатой
а в момент времени тело находилось в точке с координатой 
Для времени имеем:

Для времени имеем:

Решая систему уравнений (2.19) и (2.20), получим


2.2.5 Как найти графически момент и координату встречи двух тел?
Пусть даны законы движения двух тел:  и
и  Согласно пункту 2.5 графиками обоих законов являются прямые линии. Необходимо на одном графике построить оба закона.
Согласно пункту 2.5 графиками обоих законов являются прямые линии. Необходимо на одном графике построить оба закона.
Графики пересекаются в одной точке. Координаты этой точки и являются временем и местом встречи.
2.2.6 Как аналитически найти координату и время встречи двух тел?
Пусть даны законы движения двух тел: и  В момент встречи тела оказываются в одной координате, то есть
В момент встречи тела оказываются в одной координате, то есть  и необходимо решить уравнение:
и необходимо решить уравнение:

Решение уравнения имеет вид:

Для нахождения координаты достаточно подставить вместо t найденное значение  в любой из законов движения:
в любой из законов движения:

или

2.2.7 Как найти среднюю скорость, если тело половину пути проехало со скоростью  а вторую половину пути
а вторую половину пути 
По определению (2.8):

В нашем случае, так как на каждой половине пути тело едет с постоянной скоростью, то

Получаем

В общем случае, если весь путь разбить на n равных участков, на каждом из которых тело едет с постоянной скоростью, то

Формула справедлива только если весь путь разбит на равные участки. Если же разбиение будет иное, то, естественно, формула для нахождения средней скорости, будет иной.
2.2.8 Как найти среднюю скорость, если тело половину времени проехало со скоростью а вторую половину времени
По определению (2.8):
В нашем случае, так как каждую половину времени тело едет с постоянной скоростью, то

Получаем

В общем случае, если все время разбито на n равных промежутков, на каждом из которых тело едет с постоянной скоростью, то

Формула справедлива только если все время разбито на равные промежутки. Если же разбиение будет иное, то, естественно, формула для нахождения средней скорости, будет иной.
2.2.9 Как найти скорость, с которой движется моторная лодка по течению реки?
Согласно формуле  скорость тела относительно неподвижной системы отсчета
скорость тела относительно неподвижной системы отсчета  (в нашем случае земли), равна векторной сумме скорости подвижной системы отсчета u (в нашем случае — скорость реки) и скорости в подвижной системе отсчета
(в нашем случае земли), равна векторной сумме скорости подвижной системы отсчета u (в нашем случае — скорость реки) и скорости в подвижной системе отсчета  (в нашем случае — собственная скорость лодки).
(в нашем случае — собственная скорость лодки).

При движении по течению вектора  и
и  направлены в одну сторону, следовательно, получаем сложение двух векторов, направленных в одну сторону — используем формулу (1.15):
направлены в одну сторону, следовательно, получаем сложение двух векторов, направленных в одну сторону — используем формулу (1.15):

Таким образом, при движении любого тела по течению его скорость определяется формулой
2.2.10 Как найти скорость, с которой движется моторная лодка против течения реки?
Согласно формуле скорость тела относительно неподвижной системы отсчета (в нашем случае земли) равна векторной сумме скорости подвижной системы отсчета u (в нашем случае — скорость реки) и скорости в подвижной системе отсчета (в нашем случае — собственная скорость лодки).

Перепишем формулу в виде:

Вектора и  направлены в одну сторону, следовательно, получаем вычитание двух векторов, направленных в одну сторону — используем формулу
направлены в одну сторону, следовательно, получаем вычитание двух векторов, направленных в одну сторону — используем формулу  :
:

2.2.11 Как найти скорость, с которой движется моторная лодка, если ее скорость направлена перпендикулярно течению реки?
Согласно формуле скорость тела относительно неподвижной системы отсчета (в нашем случае земли), равна векторной сумме скорости подвижной системы отсчета u (в нашем случае — скорость реки) и скорости в подвижной системе отсчета (в нашем случае — собственная скорость лодки).
В данном случае вектора и  направлены перпендикулярно, следовательно, получаем задачу о сложении взаимно перпендикулярных векторов — используем формулу
направлены перпендикулярно, следовательно, получаем задачу о сложении взаимно перпендикулярных векторов — используем формулу  :
:

2.2.12 Как найти расстояние, на которое снесет лодку, если ее скорость направлена перпендикулярно скорости реки?
В результате сложения скоростей по формуле скорость тела относительно земли равна и направлена по прямой OD. В результате, когда тело окажется на противоположном берегу, оно попадет в точке D, и его снесет на длину 
Треугольник OAB подобен треугольнику OCD:

2.2.13 Как найти скорость, с которой движется моторная лодка, если ее скорость направлена под углом φ к скорости течения реки?
Согласно формуле скорость тела относительно неподвижной системы отсчета (в нашем случае земли), равна векторной сумме скорости подвижной системы отсчета u (в нашем случае — скорость реки) и скорости в подвижной системе отсчета (в нашем случае — собственная скорость лодки).
В результате сложения скоростей по формуле скорость тела относительно земли равна и направлена по прямой OB. Как видим, получили треугольник, в котором известен один из углов — Тогда по теореме косинусов:
Тогда по теореме косинусов:

2.2.14 Как найти расстояние, на которое снесет лодку, если ее скорость направлена под углом  к скорости течения реки?
к скорости течения реки?
В результате сложения скоростей по формуле скорость тела относительно земли равна и направлена по прямой OB. В результате, когда тело окажется на противоположном берегу, оно попадет в точке В, и его снесет на длину 
В задачах, когда движение происходит в плоскости, то есть и вдоль оси Ox, и вдоль оси Oy, необходимо введение системы координат для того, чтобы упростить рассмотрение задачи.
Проекция 

Проекция 

Формулы  и
и  не просто результат математической операции нахождения проекции, и
не просто результат математической операции нахождения проекции, и  имеют физический смысл: со скоростью тело плывет вдоль оси Ox, то есть по течению; со скоростью тело переплывает реку. Например, время, за которое тело переплывет реку, можно найти просто поделив ширину реки на
имеют физический смысл: со скоростью тело плывет вдоль оси Ox, то есть по течению; со скоростью тело переплывает реку. Например, время, за которое тело переплывет реку, можно найти просто поделив ширину реки на

Тогда

2.2.15 Под каким углом α нужно направить собственную скорость лодки, чтобы за минимальное время переплыть реку?
Согласно формуле скорость, с которой лодка переплывает реку, равна:

Очевидно, что время будет минимальным, если будет максимальным, то есть 
2.2.16 С какой скоростью машина обгоняет вторую машину, если они движутся в одну сторону?
Пусть 1-ая машина движется вправо со скоростью  а 2-ая машина также движется вправо со скоростью
а 2-ая машина также движется вправо со скоростью  Скорость обгона — это скорость, с которой 1-ая машина движется относительно 2-ой, то есть — это относительная скорость, и она определяется формулой :
Скорость обгона — это скорость, с которой 1-ая машина движется относительно 2-ой, то есть — это относительная скорость, и она определяется формулой :

Так как  и
и  направлены в одну сторону, то получили задачу о вычитании векторов, направленных в одну сторону — формула :
направлены в одну сторону, то получили задачу о вычитании векторов, направленных в одну сторону — формула :

Заметим, что при обгоне, естественно  поэтому
поэтому 
2.2.17 За какое время проедут мимо друг друга два поезда, двигающиеся в одном направлении?
Пусть длина 1-го поезда  а скорость 2-го поезда
а скорость 2-го поезда  Скорость обгона определяется формулой Тогда
Скорость обгона определяется формулой Тогда

2.2.18 С какой скоростью машина едет навстречу вторую машину, если они движутся в противоположных направлениях?
Пусть 1-ая машина движется вправо со скоростью а 2-ая машина движется влево со скоростью Скорость движения навстречу — это скорость, с которой 1-ая машина движется относительно 2-ой, то есть — это относительная скорость, и она определяется формулой :
Перепишем эту формулу в виде:

Так как и  направлены в одну сторону, то получили задачу о вычитании векторов, направленных в одну сторону — формула :
направлены в одну сторону, то получили задачу о вычитании векторов, направленных в одну сторону — формула :

2.2.19 За какое время проедут мимо друг друга два поезда, двигающиеся в противоположных направлениях?
Пусть длина 1-го поезда а скорость 2-го поезда Скорость обгона определяется формулой Тогда

2.2.20 Как найти относительную скорость, если тела движутся по взаимно перпендикулярным направлениям?
Пусть 1-ая машина движется вправо со скоростью а 2-ая машина движется перпендикулярно первой со скоростью Относительная скорость определяется формулой :
Так как вектора и перпендикулярны, то воспользуемся формулой :

