Механическое движение
О чем эта статья:
Механическое движение
Когда мы идем в школу или на работу, автобус подъезжает к остановке или сладкий корги гуляет с хозяином, мы имеем дело с механическим движением.
Механическим движением называется изменение положения тел в пространстве относительно других тел с течением времени.
«Относительно других тел» — очень важные слова в этом определении. Для описания движения нам нужны:
- тело отсчета
- система координат
- часы
В совокупности эти три параметра образуют систему отсчета.
В механике есть такой раздел — кинематика. Он отвечает на вопрос, как движется тело. Дальше мы с помощью кинематики опишем разные виды механического движения. Не переключайтесь 😉
Прямолинейное равномерное движение
Движение по прямой, при котором тело проходит равные участки пути за равные промежутки времени называют прямолинейным равномерным. Это любое движение с постоянной скоростью.
Например, если у вас ограничение скорости на дороге 60 км/ч, и у вас нет никаких препятствий на пути — скорее всего, вы будете двигаться прямолинейно равномерно.
Мы можем охарактеризовать это движение следующими величинами.
Скалярные величины (определяются только значением)
- Время — в международной системе единиц СИ измеряется в секундах [с].
- Путь — длина траектории (линии, по которой движется тело). В случае прямолинейного равномерного движения — длина отрезка [м].
Векторные величины (определяются значением и направлением)
- Скорость — характеризует быстроту перемещения и направление движения материальной точки [м/с].
- Перемещение — вектор, проведенный из начальной точки пути в конечную [м].
Проецирование векторов
Векторное описание движения полезно, так как на одном чертеже всегда можно изобразить много разнообразных векторов и получить перед глазами наглядную «картину» движения.
Однако всякий раз использовать линейку и транспортир, чтобы производить действия с векторами, очень трудоёмко. Поэтому эти действия сводят к действиям с положительными и отрицательными числами — проекциями векторов.
Если вектор сонаправлен с осью, то его проекция равна длине вектора. А если вектор противоположно направлен оси — проекция численно равна длине вектора, но отрицательна. Если вектор перпендикулярен — его проекция равна нулю.
Скорость может определяться по вектору перемещения и пути, только это будут две разные характеристики.
Скорость — это векторная физическая величина, которая характеризует быстроту перемещения, а средняя путевая скорость — это отношение длины пути ко времени, за которое путь был пройден.
Скорость
— скорость [м/с]
— перемещение [м]
— время [с]
Средняя путевая скорость
V ср.путевая = S/t
V ср.путевая — средняя путевая скорость [м/с]
S — путь [м]
t — время [с]
Задача
Найдите, с какой средней путевой скоростью должен двигаться автомобиль, если расстояние от Санкт-Петербурга до Великого Новгорода в 210 километров ему нужно пройти за 2,5 часа. Ответ дайте в км/ч.
Решение:
Возьмем формулу средней путевой скорости
V ср.путевая = S/t
Подставим значения:
V ср.путевая = 210/2,5 = 84 км/ч
Ответ: автомобиль будет двигаться со средней путевой скоростью равной 84 км/ч
Уроки физики в онлайн-школе Skysmart не менее увлекательны, чем наши статьи!
Уравнение движения
Одной из основных задач механики является определение положения тела относительно других тел в данный момент времени. Для решения этой задачи помогает уравнение движения, то есть зависимость координаты тела от времени х = х(t).
Уравнение движения
x(t) — искомая координата в момент времени t [м]
x0 — начальная координата [м]
vx — скорость тела в данный момент времени [м/с]
t — момент времени [с]
Если положительное направление оси ОХ противоположно направлению движения тела, то проекция скорости тела на ось ОХ отрицательна, скорость меньше нуля (v
Уравнение движения при движении против оси
x(t) — искомая координата в момент времени t [м]
x0 — начальная координата [м]
vx — скорость тела в данный момент времени [м/с]
t — момент времени [с]
Прямолинейное равноускоренное движение
Чтобы разобраться с тем, что за тип движения в этом заголовке, нужно ввести новое понятие — ускорение.
Ускорение — векторная физическая величина, характеризующая быстроту изменения скорости. В международной системе единиц СИ измеряется в метрах, деленных на секунду в квадрате.
СИ — международная система единиц. «Перевести в СИ» означает перевод всех величин в метры, килограммы, секунды и другие единицы измерения без приставок. Исключение — килограмм с приставкой «кило».
Итак, равноускоренное прямолинейное движение — это движение с ускорением по прямой линии. Движение, при котором скорость тела меняется на равную величину за равные промежутки времени.
Уравнение движения и формула конечной скорости
Основная задача механики не поменялась по ходу текста — определение положения тела относительно других тел в данный момент времени. У равноускоренного движения в уравнении появляется ускорение.
Уравнение движения для равноускоренного движения
x(t) — искомая координата в момент времени t [м]
x0 — начальная координата [м]
v0x — начальная скорость тела в [м/с]
t — время [с]
ax — ускорение [м/с 2 ]
Для этого процесса также важно уметь находить конечную скорость — решать задачки так проще. Конечная скорость находится по формуле:
Формула конечной скорости
— конечная скорость тела [м/с]
— начальная скорость тела [м/с]
— время [с]
— ускорение [м/с 2 ]
Задача
Найдите местоположение автобуса, который разогнался до скорости 60 км/ч за 3 минуты, через 0,5 часа после начала движения из начала координат.
Решение:
Сначала найдем ускорение автобуса. Его можно выразить из формулы конечной скорости:
Так как автобус двигался с места, . Значит
Время дано в минутах, переведем в часы, чтобы соотносилось с единицами измерения скорости.
3 минуты = 3/60 часа = 1/20 часа = 0,05 часа
Подставим значения:
a = v/t = 60/0,05 = 1200 км/ч 2
Теперь возьмем уравнение движения.
x(t) = x0 + v0xt + axt 2 /2
Начальная координата равна нулю, начальная скорость, как мы уже выяснили — тоже. Значит уравнение примет вид:
Ускорение мы только что нашли, а вот время будет равно не 3 минутам, а 0,5 часа, так как нас просят найти координату в этот момент времени.
Подставим циферки:
км
Ответ: через полчаса координата автобуса будет равна 150 км.
Движение по вертикали
Движение по вертикали — это частный случай равноускоренного движения. Дело в том, что на Земле тела падают с одинаковым ускорением — ускорением свободного падения. Для Земли оно приблизительно равно 9,81 м/с 2 , а в задачах мы и вовсе осмеливаемся округлять его до 10 (физики просто дерзкие).
Вообще в значении ускорения свободного падения для Земли очень много знаков после запятой. В школе обычно дают значение: g = 9,8 м/с 2 . В экзаменах ОГЭ и ЕГЭ в справочных данных дают g = 10 м/с 2 .
Частным случаем движения по вертикали (частным случаем частного случая, получается) считается свободное падение — это равноускоренное движение под действием силы тяжести, когда другие силы, действующие на тело, отсутствуют или пренебрежимо малы.
Помните о том, что свободное падение — это не всегда движение по вертикали из состояния покоя. Если мы бросаем тело вверх, то начальная скорость, конечно же, будет.
Вектор скорости и ускорения материальной точки и их модули. Пример решения задач.
В очередной раз меня попросили решить пару задачек по физике, и я вдруг обнаружил, что не могу решить их с ходу. Немного погуглив, я обнаружил, что сайты в топе выдачи содержат сканы одного и того же учебника и не описывают конкретных примеров решений задачи о том, как найти вектор скорости и ускорения материальной точки. По-этому я решил поделиться с миром примером своего решения.
Траектория движения материальной точки через радиус-вектор
Подзабыв этот раздел математики, в моей памяти уравнения движения материальной точки всегда представлялись при помощи знакомой всем нам зависимости y(x) , и взглянув на текст задачи, я немного опешил когда увидел векторы. Оказалось, что существует представление траектории материальной точки при помощи радиус-вектора – вектора, задающего положение точки в пространстве относительно некоторой заранее фиксированной точки, называемой началом координат.

Формула траектория движения материальной точки помимо радиус-вектора описывается так же ортами – единичными векторами i, j , k в нашем случае совпадающими с осями системы координат. И, наконец, рассмотрим пример уравнения траектории материальной точки (в двумерном пространстве):

Что интересного в данном примере? Траектория движения точки задается синусами и косинусами, как вы думаете, как будет выглядеть график в всем нам знакомом представлении y(x) ? “Наверное какой-то жуткий”, подумали вы, но все не так сложно как кажется! Попробуем построить траекторию движения материальной точки y(x), если она движется по представленному выше закону:

Здесь я заметил квадрат косинуса, если вы в каком-нибудь примере видите квадрат синуса или косинуса, это значит что нужно применять основное тригонометрическое тождество, что я и сделал (вторая формула) и преобразовал формулу координаты y, чтобы вместо синуса подставить в нее формулу изменения x:

В итоге жуткий закон движения точки оказался обычной параболой, ветви которой направлены вниз. Надеюсь, вы поняли примерный алгоритм построения зависимости y(x) из представления движения через радиус-вектор. Теперь перейдем к нашему главному вопросу: как же найти вектор скорости и ускорения материальной точки, а так же их модули.
Вектор скорости материальной точки

Всем известно, что скорость материальной точки – это величина пройденного пути точкой за единицу времени, то есть производная от формулы закона движения. Чтобы найти вектор скорости нужно взять производную по времени. Давайте рассмотрим конкретный пример нахождения вектора скорости.
Пример нахождения вектора скорости
Имеем закон перемещения материальной точки:

Теперь нужно взять производную от этого многочлена, если вы забыли как это делается, то вот вам таблица производных различных функций. В итоге вектор скорости будет иметь следующий вид:

Все оказалось проще, чем вы думали, теперь найдем вектор ускорения материальной точки по тому же самому закону, представленному выше.
Как найти вектор ускорения материальной точки

Вектор ускорения точки это векторная величина, характеризующая изменение с течением времени модуля и направления скорости точки. Чтобы найти вектор ускорения материальной точки в нашем примере, нужно взять производную, но уже от формулы вектора скорости, представленной чуть выше:

Модуль вектора скорости точки
Теперь найдем модуль вектора скорости материальной точки. Как вы знаете из 9-го класса, модуль вектора – это его длина, в прямоугольных декартовых координатах равна квадратному корню из суммы квадратов его координат. И откуда же из полученного нами выше вектора скорости взять его координаты спросите вы? Все очень просто:

Теперь достаточно только подставить время, указанное в задаче и получить конкретное числовое значение.
Модуль вектора ускорения
Как вы поняли из написанного выше (и из 9-го класса), нахождение модуля вектора ускорения происходит тем же образом, что и модуля вектора скорости: извлекаем корень квадратный из суммы квадратов координат вектора, все просто! Ну и вот вам, конечно же, пример:

Как вы видите, ускорение материальной точки по заданному выше закону не зависит от времени и имеет постоянную величину и направление.
Еще примеры решений задачи нахождения вектора скорости и ускорения
А вот тут вы можете найти примеры решения и других задач по физике на тему “механика твердых тел”. А для тех, кто не совсем понял как найти вектор скорости и ускорения, вот вам еще парочка примеров из сети без всяких лишних объяснений, надеюсь, они вам помогут.

Если у вас возникли какие-нибудь вопросы, вы можете задать их в комментариях.
Как найти скорость если известна начальная скорость и время?
Итак, чтобы найти скорость, к начальной скорости прибавляем произведение ускорения на время. Если V0 = 0, то V = а*t. Чтобы найти время, нужно вначале найти разность между скоростью в данный момент и начальной скоростью, затем полученный результат разделить на ускорение.
Как найти начальную скорость предмета?
Если известны пройденное расстояние, время и ускорение, для определения начальной скорости можно использовать следующее соотношение:
- Vi = (d / t) — [(a * t) / 2]
- В эту формулу входят следующие величины: Vi — начальная скорость d — пройденное расстояние a — ускорение t — время
Как найти скорость при равноускоренном движении?
Формула для скорости при равноускоренном движении: v = v 0 + a t . Здесь v 0 — начальная скорость тела, a = c o n s t — ускорение. Покажем на графике, что при равноускоренном движении зависимость v ( t ) имеет вид прямой линии.
Как найти ускорение если известна начальная скорость и время?
Ускорение показывает изменение скорости движущегося тела, рассчитывается по двум скоростям и времени. Чтобы вычислить ускорение, следует найти разницу между скоростью в данный момент и начальной скоростью, затем все это разделить на время.
Как найти скорость если есть время и расстояние?
Чтобы узнать скорость движения, нужно расстояние разделить на время. Чтобы узнать расстояние, нужно скорость умножить на время. Чтобы найти время, нужно расстояние разделить на скорость.
Как найти начальную скорость ускорение?
Итак, чтобы найти скорость, к начальной скорости прибавляем произведение ускорения на время. Если V0 = 0, то V = а*t. Чтобы найти время, нужно вначале найти разность между скоростью в данный момент и начальной скоростью, затем полученный результат разделить на ускорение.
Как найти силу в физике?
Формула Умножьте массу на ускорение. Сила F, необходимая для того, чтобы придать объекту массой m ускорение a, определяется по следующей формуле: F = m x a. То есть сила равна массе, умноженной на ускорение.
Как найти скорость при равноускоренном прямолинейном движении?
Скорость прямолинейного равноускоренного движения: v x = v 0 x + a x t , где v 0 x — проекция начальной скорости, a x — проекция ускорения, t — время.
Как найти скорость при Равнозамедленном движении?
S = v 2 − v 0 2 2 a , где v 0 — модуль скорости в начале временного интервала; v — модуль скорости в конце временного интервала; a — модуль ускорения.
Как определить путь при равноускоренном движении?
1. Скорость и путь при равноускоренном движении
- s = v 0 t + a t 2 2 , где а — это ускорение. …
- Зависимость ускорения от времени. …
- Зависимость скорости от времени. …
- Правило определения пути по графику v(t): численное значение перемещения (пути) — это площадь прямоугольника под графиком скорости.
- Зависимость пути от времени.
Как найти время торможения?
Зная силу торможения, но не зная его время, вы можете произвести необходимые расчеты по формуле:t = m⋅υ0/ Fтр, где t – время торможения, m – масса движущегося тела, υ0 – скорость тела в момент начала торможения, Fтр – сила торможения.
Как найти скорость из уравнения движения?
Ее вычисляют при помощи выражения: v=st(9), где s — путь; t — время движения.
Как найти ускорение если известна масса и сила?
m = F / a — Масса равна отношению силы к ускорения. Ускорение — физическая величина, определяющая быстроту изменения скорости тела, то есть первая производная от скорости по времени. a = F / m — Ускорение равно отношению силы к массы.
Как найти скорость время расстояние 4 класс?
- Скорость — это расстояние, пройденное за единицу времени: за 1 секунду, за 1 минуту, за 1 час и так далее.
- скорость = расстояние : время
- время = расстояние : скорость
- расстояние = скорость · время
Как найти скорость по математике?
Чтобы найти скорость, нужно расстояние разделить на время движения. Если расстояние дано в километрах, а время движения в часах, скорость измеряется в километрах в час (км/ч).
Что такое скорость время расстояние?
Скорость — это отношение пройденного пути ко времени, за которое этот путь пройден. Расстояние = Скорость * Время, s=v*t; Пример задачи.
[spoiler title=”источники:”]
http://avtograf70.ru/raznoe/kak-najti-skorost-esli-izvestna-nachalnaya-skorost-i-vremya.html
[/spoiler]
Решение задачи (РГР) К1 «Определение скорости и ускорения точки по заданным уравнениям ее движения» по разделу «кинематика» теоретической механики.
Пример определения для заданного момента времени положения точки на траектории, скорости, полного, касательного и нормального ускорения, радиуса кривизны траектории и вида траектории движения точки, если движение точки задано уравнениями.
Задача
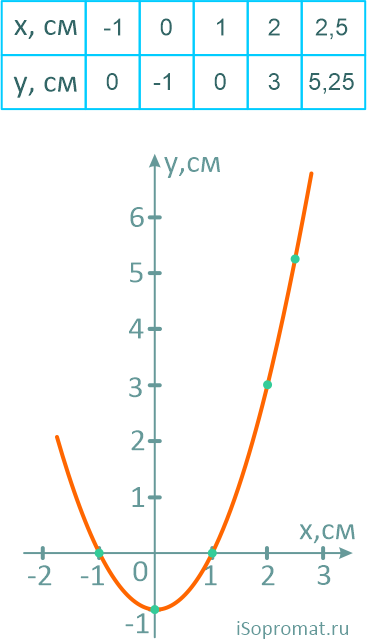
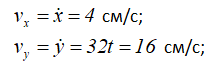
Движение точки M задано уравнениями:
Требуется:
Установить вид траектории движения точки M, и для момента времени t = t1 = 0,5 с найти:
- положение точки на траектории,
- скорость, полное, касательное и нормальное ускорения,
- радиус кривизны траектории.
Другие примеры решений >
Помощь с решением задач >
Решение
Расчет траектории движения точки
Уравнения движения можно рассматривать как параметрические уравнения траектории точки.
Другие видео
Чтобы узнать вид траектории в координатной форме, надо получить прямую зависимость между переменными x и y, для этого избавимся от параметра времени t, выразив его, например, из первого уравнения и подставив во второе.
Получилось квадратное уравнение. То есть точка движется по параболе.
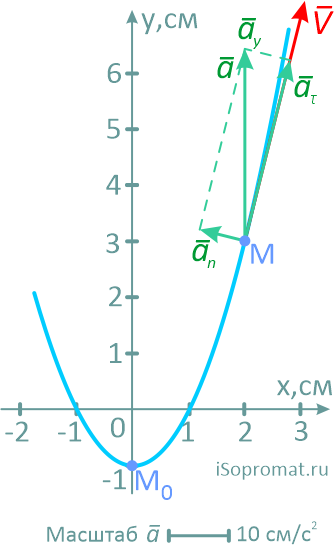
Построим траекторию движения, рассчитав несколько её точек.
Положение точки на траектории
Определим положения точки в начале движения и в заданный момент времени.
Для этого в исходные уравнения подставляем соответственно сначала 0
а затем, половину секунды.
Положение точки на ее траектории в заданный момент обозначим буквой M, и все остальные параметры будем рассчитывать для неё.
Расчет скорости точки
Направление и величину скорости точки определим как векторную сумму её проекций на оси координат.
![]()
Здесь i, j — орты осей x и y.
vx, vy — проекции вектора скорости на оси координат.
Проекции вектора скорости получим, взяв первые производные по времени t от соответствующих заданных уравнений движения точки.
Далее выбрав масштаб, из точки M последовательно и с учетом знака, откладываем оба вектора.
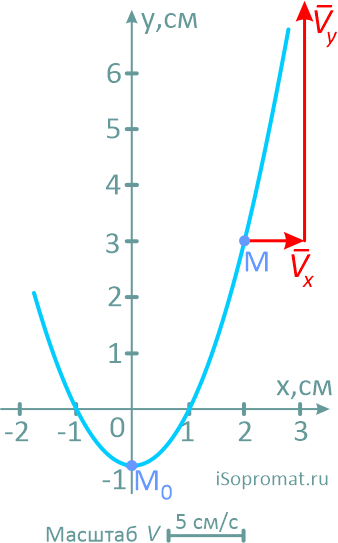
Сам вектор скорости получим, соединив точку M с концом второго вектора и направив его по ходу движения точки.
Здесь надо отметить, что вектор скорости всегда должен располагаться по касательной к траектории. Любое другое положение будет указывать на ошибки в расчетах.
Рассчитаем модуль вектора скорости

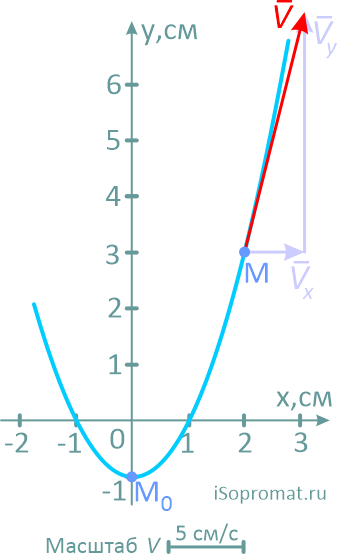
Расчет ускорений точки
Проекции полного ускорения точки на оси координат определяются как вторая производная от исходных уравнений движения точки.

Здесь, ax, ay – проекции ускорения точки на оси координат.
В этом примере, горизонтальная проекция ускорения оказалась равной нулю, поэтому его модуль и направление будут совпадать с вертикальной.
![]()
Касательная составляющая полного ускорения это производная скорости точки по времени.

Ее можно рассчитать по этой формуле.

Вектор касательного ускорения всегда направлен по линии вектора скорости.
Положительная величина говорит об ускоренном движении точки и тогда направления скорости и касательного ускорения совпадают.
В противном случае они разнонаправлены, и движение точки замедляется.
Модуль нормального ускорения определим по формуле Пифагора, так как векторы касательного и центростремительного ускорений всегда взаимно перпендикулярны.

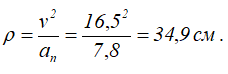
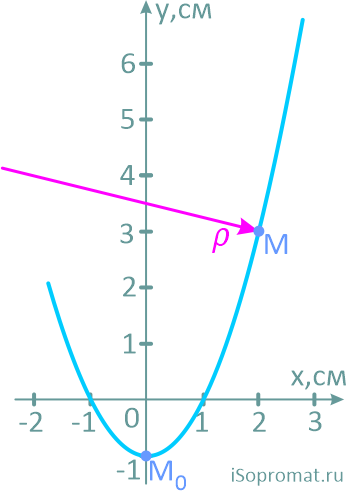
Расчет радиуса кривизны траектории
Осталось найти только радиус кривизны траектории в точке M, который равен отношению квадрата скорости к модулю нормального ускорения.
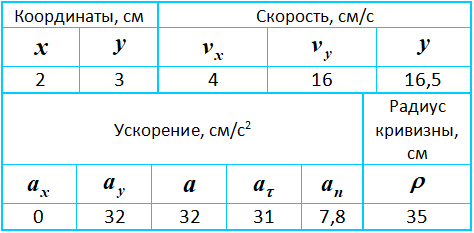
Результаты расчетов
Результаты вычислений для заданного момента времени t1=0,5c приведены в таблице:
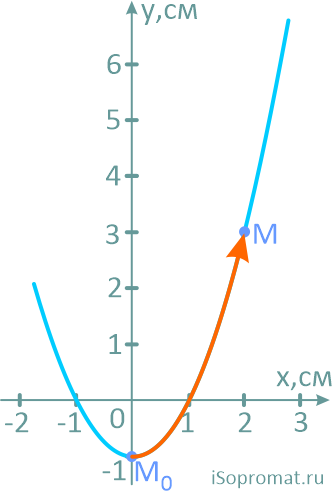
На рисунке показано положение точки M в заданный момент времени и векторы скорости и ускорений в выбранном масштабе.
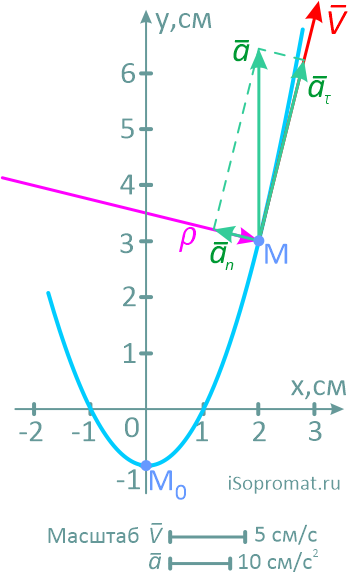
Вектор v строим по составляющим vx и vy, причем этот вектор должен по направлению совпадать с касательной к траектории.
Вектор a строим по составляющим ax и ay и затем раскладываем на составляющие векторы aτ и an. Совпадение величин aτ и an, найденных из чертежа, с их значениями, полученными аналитически, служит критерием правильности решения.
Другие примеры решения задач >
2.2.1 Как перевести из км/ч в м/с и т. д?
В задачах часто необходимо переводить из одних единиц измерения в другие:
1 км/ч = (1000 м)/(3600 с) = 5/18 м/с,
1 м/с = 18/5 км/ч,
1 км/с = 1000 м/с,
1 см/с = 0,01 м/с,
1 м/мин = 1/60 м/с.
Например, если  то для того, чтобы перевести в м/с, нужно умножить на 5/18:
то для того, чтобы перевести в м/с, нужно умножить на 5/18:

2.2.2 Как найти скорость тела, если известен закон движения?
Закон равномерного движения имеет вид:

Видим, что в этой формуле скорость стоит коэффициентом перед временем. Поэтому, если в условии задачи дан закон движения, необходимо посмотреть на коэффициент перед t — это и есть скорость.
Например, пусть закон движения имеет вид:  В данном случае коэффициент перед t равен 5, следовательно,
В данном случае коэффициент перед t равен 5, следовательно, 
2.2.3 Как определить скорость по графику координаты от времени?
Закон равномерного движения имеет вид:
Графиком этого закона является прямая линия. Так как  — коэффициент перед t, то является угловым коэффициентом прямой.
— коэффициент перед t, то является угловым коэффициентом прямой.

Для графика 1:

То, что график 1 «поднимается вверх», означает — тело едет в положительном направлении оси Ox.
Для графика 2:

То, что график 2 «опускается вниз», означает — тело едет в отрицательном направлении оси Ox.
Для определения  и
и  выбираем такие точки на графике, в которых можно точно определить значения, как правило, это точки, находящиеся в вершинах клеток.
выбираем такие точки на графике, в которых можно точно определить значения, как правило, это точки, находящиеся в вершинах клеток.
2.2.4 Как найти закон движения, если известны координаты тела в моменты времени  и
и  ?
?
Пусть в момент времени тело находилось в точке с координатой  а в момент времени тело находилось в точке с координатой
а в момент времени тело находилось в точке с координатой 
Для времени имеем:

Для времени имеем:

Решая систему уравнений (2.19) и (2.20), получим


2.2.5 Как найти графически момент и координату встречи двух тел?
Пусть даны законы движения двух тел:  и
и  Согласно пункту 2.5 графиками обоих законов являются прямые линии. Необходимо на одном графике построить оба закона.
Согласно пункту 2.5 графиками обоих законов являются прямые линии. Необходимо на одном графике построить оба закона.
Графики пересекаются в одной точке. Координаты этой точки и являются временем и местом встречи.
2.2.6 Как аналитически найти координату и время встречи двух тел?
Пусть даны законы движения двух тел: и  В момент встречи тела оказываются в одной координате, то есть
В момент встречи тела оказываются в одной координате, то есть  и необходимо решить уравнение:
и необходимо решить уравнение:

Решение уравнения имеет вид:

Для нахождения координаты достаточно подставить вместо t найденное значение  в любой из законов движения:
в любой из законов движения:

или

2.2.7 Как найти среднюю скорость, если тело половину пути проехало со скоростью  а вторую половину пути
а вторую половину пути 
По определению (2.8):

В нашем случае, так как на каждой половине пути тело едет с постоянной скоростью, то

Получаем

В общем случае, если весь путь разбить на n равных участков, на каждом из которых тело едет с постоянной скоростью, то

Формула справедлива только если весь путь разбит на равные участки. Если же разбиение будет иное, то, естественно, формула для нахождения средней скорости, будет иной.
2.2.8 Как найти среднюю скорость, если тело половину времени проехало со скоростью а вторую половину времени
По определению (2.8):
В нашем случае, так как каждую половину времени тело едет с постоянной скоростью, то

Получаем

В общем случае, если все время разбито на n равных промежутков, на каждом из которых тело едет с постоянной скоростью, то

Формула справедлива только если все время разбито на равные промежутки. Если же разбиение будет иное, то, естественно, формула для нахождения средней скорости, будет иной.
2.2.9 Как найти скорость, с которой движется моторная лодка по течению реки?
Согласно формуле  скорость тела относительно неподвижной системы отсчета
скорость тела относительно неподвижной системы отсчета  (в нашем случае земли), равна векторной сумме скорости подвижной системы отсчета u (в нашем случае — скорость реки) и скорости в подвижной системе отсчета
(в нашем случае земли), равна векторной сумме скорости подвижной системы отсчета u (в нашем случае — скорость реки) и скорости в подвижной системе отсчета  (в нашем случае — собственная скорость лодки).
(в нашем случае — собственная скорость лодки).

При движении по течению вектора  и
и  направлены в одну сторону, следовательно, получаем сложение двух векторов, направленных в одну сторону — используем формулу (1.15):
направлены в одну сторону, следовательно, получаем сложение двух векторов, направленных в одну сторону — используем формулу (1.15):

Таким образом, при движении любого тела по течению его скорость определяется формулой
2.2.10 Как найти скорость, с которой движется моторная лодка против течения реки?
Согласно формуле скорость тела относительно неподвижной системы отсчета (в нашем случае земли) равна векторной сумме скорости подвижной системы отсчета u (в нашем случае — скорость реки) и скорости в подвижной системе отсчета (в нашем случае — собственная скорость лодки).

Перепишем формулу в виде:

Вектора и  направлены в одну сторону, следовательно, получаем вычитание двух векторов, направленных в одну сторону — используем формулу
направлены в одну сторону, следовательно, получаем вычитание двух векторов, направленных в одну сторону — используем формулу  :
:

2.2.11 Как найти скорость, с которой движется моторная лодка, если ее скорость направлена перпендикулярно течению реки?
Согласно формуле скорость тела относительно неподвижной системы отсчета (в нашем случае земли), равна векторной сумме скорости подвижной системы отсчета u (в нашем случае — скорость реки) и скорости в подвижной системе отсчета (в нашем случае — собственная скорость лодки).
В данном случае вектора и  направлены перпендикулярно, следовательно, получаем задачу о сложении взаимно перпендикулярных векторов — используем формулу
направлены перпендикулярно, следовательно, получаем задачу о сложении взаимно перпендикулярных векторов — используем формулу  :
:

2.2.12 Как найти расстояние, на которое снесет лодку, если ее скорость направлена перпендикулярно скорости реки?
В результате сложения скоростей по формуле скорость тела относительно земли равна и направлена по прямой OD. В результате, когда тело окажется на противоположном берегу, оно попадет в точке D, и его снесет на длину 
Треугольник OAB подобен треугольнику OCD:

2.2.13 Как найти скорость, с которой движется моторная лодка, если ее скорость направлена под углом φ к скорости течения реки?
Согласно формуле скорость тела относительно неподвижной системы отсчета (в нашем случае земли), равна векторной сумме скорости подвижной системы отсчета u (в нашем случае — скорость реки) и скорости в подвижной системе отсчета (в нашем случае — собственная скорость лодки).
В результате сложения скоростей по формуле скорость тела относительно земли равна и направлена по прямой OB. Как видим, получили треугольник, в котором известен один из углов — Тогда по теореме косинусов:
Тогда по теореме косинусов:

2.2.14 Как найти расстояние, на которое снесет лодку, если ее скорость направлена под углом  к скорости течения реки?
к скорости течения реки?
В результате сложения скоростей по формуле скорость тела относительно земли равна и направлена по прямой OB. В результате, когда тело окажется на противоположном берегу, оно попадет в точке В, и его снесет на длину 
В задачах, когда движение происходит в плоскости, то есть и вдоль оси Ox, и вдоль оси Oy, необходимо введение системы координат для того, чтобы упростить рассмотрение задачи.
Проекция 

Проекция 

Формулы  и
и  не просто результат математической операции нахождения проекции, и
не просто результат математической операции нахождения проекции, и  имеют физический смысл: со скоростью тело плывет вдоль оси Ox, то есть по течению; со скоростью тело переплывает реку. Например, время, за которое тело переплывет реку, можно найти просто поделив ширину реки на
имеют физический смысл: со скоростью тело плывет вдоль оси Ox, то есть по течению; со скоростью тело переплывает реку. Например, время, за которое тело переплывет реку, можно найти просто поделив ширину реки на

Тогда

2.2.15 Под каким углом α нужно направить собственную скорость лодки, чтобы за минимальное время переплыть реку?
Согласно формуле скорость, с которой лодка переплывает реку, равна:

Очевидно, что время будет минимальным, если будет максимальным, то есть 
2.2.16 С какой скоростью машина обгоняет вторую машину, если они движутся в одну сторону?
Пусть 1-ая машина движется вправо со скоростью  а 2-ая машина также движется вправо со скоростью
а 2-ая машина также движется вправо со скоростью  Скорость обгона — это скорость, с которой 1-ая машина движется относительно 2-ой, то есть — это относительная скорость, и она определяется формулой :
Скорость обгона — это скорость, с которой 1-ая машина движется относительно 2-ой, то есть — это относительная скорость, и она определяется формулой :

Так как  и
и  направлены в одну сторону, то получили задачу о вычитании векторов, направленных в одну сторону — формула :
направлены в одну сторону, то получили задачу о вычитании векторов, направленных в одну сторону — формула :

Заметим, что при обгоне, естественно  поэтому
поэтому 
2.2.17 За какое время проедут мимо друг друга два поезда, двигающиеся в одном направлении?
Пусть длина 1-го поезда  а скорость 2-го поезда
а скорость 2-го поезда  Скорость обгона определяется формулой Тогда
Скорость обгона определяется формулой Тогда

2.2.18 С какой скоростью машина едет навстречу вторую машину, если они движутся в противоположных направлениях?
Пусть 1-ая машина движется вправо со скоростью а 2-ая машина движется влево со скоростью Скорость движения навстречу — это скорость, с которой 1-ая машина движется относительно 2-ой, то есть — это относительная скорость, и она определяется формулой :
Перепишем эту формулу в виде:

Так как и  направлены в одну сторону, то получили задачу о вычитании векторов, направленных в одну сторону — формула :
направлены в одну сторону, то получили задачу о вычитании векторов, направленных в одну сторону — формула :

2.2.19 За какое время проедут мимо друг друга два поезда, двигающиеся в противоположных направлениях?
Пусть длина 1-го поезда а скорость 2-го поезда Скорость обгона определяется формулой Тогда

2.2.20 Как найти относительную скорость, если тела движутся по взаимно перпендикулярным направлениям?
Пусть 1-ая машина движется вправо со скоростью а 2-ая машина движется перпендикулярно первой со скоростью Относительная скорость определяется формулой :
Так как вектора и перпендикулярны, то воспользуемся формулой :

- Прямолинейное равномерное движение на координатной прямой
- Уравнение прямолинейного равномерного движения
- Удобная система отсчета для решения задачи о прямолинейном движении
- График движения x=x(t)
- Как найти уравнение движения по графику движения?
- График скорости vx=vx(t)
- Как найти путь и перемещение по графику скорости?
- Задачи
п.1. Прямолинейное равномерное движение на координатной прямой
Система отсчета, с помощью которой можно описать прямолинейное движение состоит из:
1) тела отсчета; 2) координатной прямой; 3) часов для отсчета времени.
Пусть телом отсчета будет дом.
В начальный момент времени машина стоит в 20 м справа от дома.
Рассмотрим движение машины со скоростью 10 м/с вправо.
Направим координатную прямую параллельно вектору скорости, вправо.

Составим таблицу перемещений за первые 4 секунды:
| t, c | 0 | 1 | 2 | 3 | 4 |
| x, м | 20 | 30 | 40 | 50 | 60 |
Стартуя с точки x0=20, машина каждую секунду удаляется от дома еще на 10 м.
Пройденный путь за 2 секунды – 10·2=20 м, за 3 секунды – 10·3=30 м, за t секунд s=vt метров. Значит, для произвольного времени t можем записать координату x в виде: begin{gather*} x=x_0+s=x_0+vt\ x=20+10t end{gather*}

Если при тех же начальных условиях и направлении координатной прямой машина будет двигаться влево, получим таблицу:
| t, c | 0 | 1 | 2 | 3 | 4 |
| x, м | 20 | 10 | 0 | -10 | -20 |
В этом случае координата x в любой момент времени t имеет вид: begin{gather*} x=x_0-st=x_0-vt\ x=20-10t end{gather*} Если же машина никуда не едет, её скорость v=0, и координата x=x0 в любой момент времени t.
п.2. Уравнение прямолинейного равномерного движения
Основная задача механики – уметь определять положение тела в пространстве в любой момент времени.
Зависимость координаты тела от времени в механике называют уравнением движения.
Если уравнение движения известно, то мы можем решить основную задачу механики.
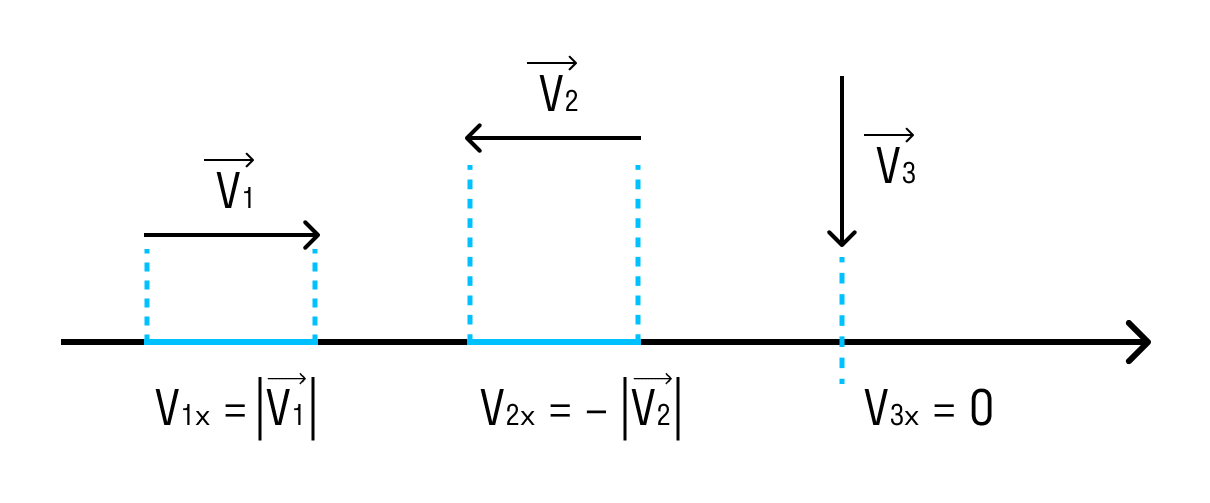
Назовем проекцией вектора скорости (overrightarrow{x}) на параллельную ему ось координат OX величину (v_x=pm|overrightarrow{v}|=pm v).
Знак проекции определяется следующим правилом:
- если направление вектора (overrightarrow{v}) совпадает с направлением оси OX, то (v_x=vgt 0)
- если направление вектора (overrightarrow{v}) противоположно направлению оси OX, то (v_x=-vlt 0)
В любой момент времени t координата тела x(t) при прямолинейном равномерном движении описывается уравнением: $$ x(t)=x_0+v_x t $$ где (x_0) – координата в начальный момент времени, (v_x) – проекция вектора скорости движения.
Проекция перемещения (overrightarrow{r}) на параллельную ему ось координат OX в любой момент времени t определяется формулой: $$ triangle x=x(t)-x_0 $$ Знак (triangle x) указывает на направление совершенного перемещения:
- если (triangle xgt 0), перемещение (overrightarrow{r}) произошло в направлении оси OX;
- если (triangle xlt 0), перемещение (overrightarrow{r}) произошло противоположно направлению оси OX.
п.3. Удобная система отсчета для решения задачи о прямолинейном движении
При решении задачи можно выбрать различные тела отсчета и связать с ними различные системы координат. Как правило, некоторая система отсчета является наиболее удобной для решения данной задачи в том смысле, что в ней уравнение движения выглядит и решается проще, чем в других системах.
При решении задач на прямолинейное движение телом отсчета может быть неподвижная поверхность (земля, пол, стол и т.п.), само движущееся тело или другое тело.
При этом системой координат является координатная прямая, параллельная направлению движения (вектору перемещения) тела, уравнение движения которого мы хотим получить.
Прямолинейное движение описывается с помощью координатной прямой, параллельной направлению движения тела.
Проекции скорости и перемещения на координатную прямую могут быть положительными, равными нулю или отрицательными. Величины скорости и перемещения будут равны длинам соответствующих проекций.
п.4. График движения x=x(t)
Сравним полученное уравнение движения (x(t)=x_0+v_x t) с уравнением прямой (y(x)=kx+b) (см. §38 справочника по алгебре для 7 класса).
В уравнении движения роль углового коэффициента (k) играет проекция скорости (v_x), а роль свободного члена (b) – начальная координата (x_0).
В осях (t) и (x) график (x(t)=x_0+v_x t) является прямой.
Эта прямая:
- возрастает, если (v_xgt 0)
- убывает, если (v_xlt 0)
- постоянна (параллельна оси (t)), если (v_x= 0)
 |
Построим графики зависимости координаты от времени для нашего примера:
x=20+10t – машина движется вправо (в направлении оси OX) |
п.5. Как найти уравнение движения по графику движения?

Шаг 1. Выбрать на прямой любые две точки (A(t_1,x_1)) и (B(t_2,x_2)).
Шаг 2. Найти проекцию скорости как отношение: $$ v_x=frac{x_2-x_1}{t_2-t_1}=frac{triangle x}{triangle t} $$ Шаг 3. Найти начальную координату по одной из формул: $$ x_0=x_1-v_x t_1 text{или} x_0=x_2-v_x t_2 $$ Шаг 4. Записать найденное уравнение движения: $$ x(t)=x_0+v_x t $$
п.6. График скорости vx=vx(t)
В осях (t) и (x) график (v_x(t)=v_x=const) является прямой, параллельной оси (t).
Эта прямая:
- расположена над осью (t), если (v_xgt 0)
- расположена под осью (t), если (v_xlt 0)
- совпадает с осью (t), если (v_x=0)
Для рассмотренного примера:
Внимание!
В отличие от алгебры, в физике масштабы на осях, как правило, разные.
Поэтому обязательно нужно:
1) указывать обозначения и единицы измерения физических величин, которым соответствуют оси графика;
2) подбирать масштабы так, чтобы с графиком было удобно работать.
п.7. Как найти путь и перемещение по графику скорости?
Пусть тело движется прямолинейно равномерно, зависимость его координаты от времени описывается уравнением: $$ x(t)=x_0+v_x t $$ Тогда в некоторый момент времени (t_1) координата равна (x_1=x_0+v_x t_1).
Несколько позже, в момент времени (t_2gt t_1) координата равна (x_2=x_0+v_x t_2).
Если (v_xgt 0), то пройденный за промежуток времени (triangle t=t_2-t_1) путь равен разности координат: $$ s=x_2-x_1=(x_0+v_x t_2)-(x_0+v_x t_1)=x_0-x_0+v_x (t_2-t_1)=v_x triangle t $$ В общем случае, т.к. (v_x) может быть и отрицательным, а путь всегда положительный, в формуле нужно поставить модуль: $$ s=|v_x|triangle t $$
Изобразим полученное соотношение на графике скорости: 
На графике скорости путь, пройденный за промежуток времени (triangle t=t_2-t_1) равен площади прямоугольника, длина которого равна (triangle t), а ширина (triangle |v_x|): $$ s=|v_x|triangle t $$
Проекция скорости (v_x) может быть не только положительной, но и отрицательной.
Если учитывать знак, то произведение: $$ triangle x=v_x triangle t $$ дает проекцию перемещения на ось OX. Знак этого произведения указывает на направление перемещения.
На графике скорости проекция перемещения на ось OX за промежуток времени (triangle t=t_2-t_1) равна площади (v_xtriangle t), с учетом знака: $$ triangle x=v_xtriangle t $$
Проекция перемещения может быть как положительной, так и отрицательной или равной 0.
п.8. Задачи
Задача 1. Спортсмен бежит по прямолинейному участку дистанции с постоянной скоростью 8 м/с. Примите (x_0=0) и запишите уравнение движения.
а) Постройте график движения (x=x(t)) и найдите с его помощью, сколько пробежит спортсмен за (t_1=5 с), за (t_2=10 с);
б) постройте график скорости (v=v(t)) и найдите с его помощью, какой путь преодолеет спортсмен за промежуток времени (triangle t=t_2-t_1)?
По условию (x_0=0, v_x=8).
Уравнение движения: (x=x_0+v_x t=0+8t=8t)
а) Строим график прямой (x=8t) по двум точкам:

По графику находим: begin{gather*} x_1=x(5)=8cdot 5=40 text{(м)}\ x_2=x(10)=8cdot 10=80 text{(м)} end{gather*}
б) Скорость (v_x=8) м/с – постоянная величина, её график:
$$ t_1=5 с, t_2=10 с $$ Пройденный путь за промежуток времени (triangle t=t_2-t_1) равен площади заштрихованного прямоугольника: $$ s=v_x triangle t=8cdot (10-5)=40 text{(м)} $$ Ответ: а) 40 м и 80 м; б) 40 м
Задача 2. Космический корабль движется прямолинейно с постоянной скоростью.
Известно, что через 1 час после старта корабль находился на расстоянии 38 тыс.км от астероида Веста, а через 2 часа после старта – на расстоянии 56 тыс.км.
а) постройте график движения корабля, найдите по графику уравнение движения.
б) на каком расстоянии от астероида находился корабль в начальный момент времени?
в) на каком расстоянии от астероида будет находиться корабль через 4 часа после старта?
г) чему равна скорость корабля в километрах в секунду?
а) Будем откладывать время в часах, а расстояние в тыс.км
Отмечаем точки A(1;38) и B(2;56), проводим через них прямую.
Полученная прямая и есть график движения (x=x(t)).
Найдем скорость корабля (v_x): $$ v_x=frac{x_2-x_1}{t_2-t_1}=frac{56-38}{2-1}=18 (text{тыс.км/ч}) $$ Найдем начальную координату (x_0): $$ x_0=x_1-v_x t_1=38-18cdot v_1=20 (text{тыс.км/ч}) $$ Получаем уравнение движения: $$ x(t)=x_0+v_x t, x(t)=20+18t $$ где (x) – в тыс.км, а (t) – в часах.
б) В начальный момент времени корабль находился на расстоянии (x_0=20) тыс.км от астероида.
в) Через 4 часа после старта корабль будет находиться на расстоянии $$ x(4)=20+18cdot 4=92 (text{тыс.км}) $$
г) Переведем скорость в км/с: $$ 18000frac{text{км}}{text{ч}}=frac{18000 text{км}}{1 text{ч}}=frac{18000 text{км}}{3600 text{c}}=5 text{км/c} $$ Ответ:
а) (x(t)=20+18t) ((x) в тыс.км, (t) в часах); б) 20 тыс.км; в) 92 тыс.км; г) 5 км/с
Содержание:
Координатный способ определения движения точки:
При координатном способе определения движения точки должны быть даны уравнения движения, т. е. заданы координаты точки как функции времени:

Задание движения точки в прямоугольных координатах
Как известно из курса аналитической геометрии, положение точки M в пространстве может быть определено положением ее проекций P, Q и R на три взаимно перпендикулярные оси (рис. 84), называемые осями координат.
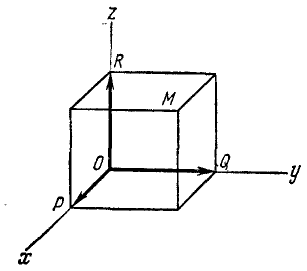
Рис. 84
Положение точки P на оси Ox вполне определяют абсциссой х. Совершенно так же положение точек Q и R определяют ординатой у и аппликатой z.
Если точка M движется относительно осей xOyz, то проекции Р, Q и R перемещаются по осям и координаты точки M изменяются.
Для определения движения точки M нужно знать ее координаты для каждого мгновения, выразить их в функциях времени.
x = x(t), (58′)
y = y(t), (58″)
z = z(t), (58″‘)
Эти функции непрерывны, так как точка не может из одного положения перейти в другое, минуя промежуточные. Они должны быть однозначны, так как точка занимает в пространстве в каждое мгновение только одно положение.
Соотношения (58) называют кинематическими уравнениями движения точки в прямоугольных координатах, а способ определения движения точки посредством соотношений (58) называют координатным способом определения движения точки. Это название неточно, потому что, кроме прямолинейных прямоугольных координат, существует множество других координатных систем.
Если траектория точки лежит в одной плоскости, то движение точки определяют двумя уравнениями в системе координат xОy: x=x(t), y=y(t).
Следовательно, при координатном способе задания движения точки в пространстве нужно задать ее три координаты, а на плоскости—две координаты как функции времени. Если точка движется прямолинейно, то, приняв прямую, по которой она движется, за ось абсцисс, мы определим движение точки одним уравнением
x = x(t).
Если движение точки задано в координатной форме, то для определения ее траектории надо из уравнений движения исключить время
Уравнение траектории
Можно определить траекторию точки, если в уравнениях движения (58) давать аргументу t различные значения и, вычислив соответствующие значения функций, отмечать положения точки по ее координатам. Следовательно. кинематические уравнения движения точки (58) можно
рассматривать как уравнения ее траектории в параметрической форме, а время — как независимый переменный параметр.
Однако более удобно получить уравнение траектории, исключив время из уравнений (58). В самом деле, траекторией называют геометрическое место всех положений движущейся точки, но в геометрии нет понятия времени, а поэтому для получения уравнения траектории нужно из кинематических уравнений движения (58) исключить время t. Если точка движется в плоскости, то, исключив время из уравнений (58′) и (58″), мы получим соотношение, связывающее х и у:
f(x, у) = 0. (59)
Это уравнение плоской кривой—траектории точки. Если же движение задано тремя уравнениями (58), то, исключив время, получим два уравнения между тремя координатами:
 (59/)
(59/)
выражающие, как известно из аналитической геометрии, кривую (траекторию) в пространстве. Точнее говоря, уравнения (59) или (59′) выражают кривую, которая полностью или в некоторой своей части является геометрическим местом всех положений движущейся точки.
Иногда бывает нужно выразить в естественной форме движение точки, заданное в прямоугольных координатах уравнениями (58), и, кроме уравнения траектории, дать также уравнение (51) движения точки по траектории. Чтобы его получить, надо продифференцировать уравнения (58) и полученные дифференциалы координат точки подставить в известную из курса высшей математики формулу, выражающую абсолютную величину элемента дуги:
 (60)
(60)
Проинтегрировав (60), мы получим уравнение (51), выражающее длину дуги s как функцию времени, или, что то же, закон движения точки по траектории.
Задача №1
По заданным уравнениям движения точки в координатной форме найти уравнение траектории и уравнение движения по траектории:
1) х = 5 cos 2t, y = 3+5sin 2t;
2) x=21,2 sin2 t, у = 21,2 cos 2t.
В обоих примерах за единицу длины принят сантиметр, за единицу времени — секунда.
Решение. Чтобы определить уравнение траектории по уравнениям движения, перенесем во втором из заданных уравнений 3 влево, возведем оба уравнения в квадрат и, сложив, получим
x2 + (y-3)2 = 25.
Это уравнение окружности с центром в точке: x = 0, y = +3.
Чтобы получить закон движения, продифференцируем заданные уравнения: dx=—10 sin 2t dt, dy = 10 cos 2t dt.
Возводя в квадрат, складывая, извлекая квадратный корень и интегрируя, находим закон движения по траектории:
s=10t + C, где C = s0.
2) Исключим время из уравнений движения во втором примере:
x+y = 21,2.
Это уравнение первого порядка относительно х и у, следовательно, траектория-прямая линия. Прямая отсекает на положительных направлениях осей координат отрезки по 21,2 см. Однако не вся прямая служит траекторией точки: из заданных уравнений видно, что х и у должны быть всегда положительны и не могут быть больше 21,2 см каждый, поэтому траекторией точки является лишь отрезок прямой x+y = 21,2, лежащей в первом квадранте (рис. 85).
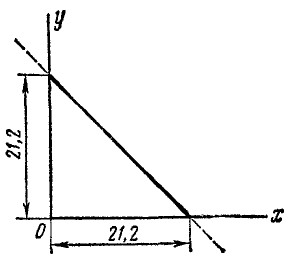
Рис. 85
На этом примере мы видим, что траекторией точки иногда является лишь часть линии, выражаемой уравнением траектории.
Продифференцируем уравнения движения:
dx = 21,2 ∙ 2 sin t cos t dt,
dy = 21,2 ∙ 2 sin t cos t dt.
Теперь no формуле (60) нетрудно найти элемент дуги траектории:

ля получения уравнения (51) движения точки по траектории остается лишь проинтегрировать найденное выражение. Интегрируем и подставляем начальные условия (при t= 0, s0 = 0):

Ответ. Уравнения траекторий x2+(y-3)2= 25 и x+y=21,2; уравнения движения по траектории s=10t+s0 и s = 30 sin 2t.
Задача №2
Движение точки задано уравнениями:
х = x’ cos φ (t)—y’ sin φ (t),
y = x’ sin φ (t) + y’ cos φ (t),
где х’ и у’ — некоторые постоянные величины, a φ(t)— любая функция времени. Определить траекторию точки.
Решение. Возведем каждое из уравнений в квадрат, а затем сложим их:
x2 + y2 = χ‘2 + y‘2.
По условию, х’ и у’ — постоянные. Обозначая сумму их квадратов через r2, получим
x2 + y2 = r2.
Ответ. Окружность с центром в начале координат радиуса  .
.
Задача №3
Поезд длиной l м сначала идет по горизонтальному пути (рис. 86, а), а потом поднимается в гору под углом 2α к горизонту. Считая поезд однородной лентой, найти траекторию его центра тяжести.
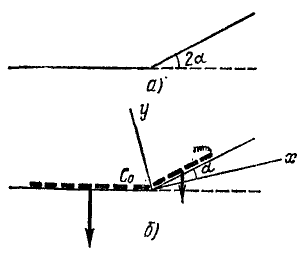
Рис. 86
Решение. Для решения задачи нужно определить координаты центра тяжести поезда, найти уравнения движения центра тяжести и исключить из них время.
Направим оси координат по внутренней и внешней равиоделяшнм угла 2α (рис. 86, б). Траектория центра тяжести поезда не зависит от скорости поезда. Для простоты подсчетов предположим, что он идет равномерно со скоростью υ м/сек и в начальное мгновение t=0 подошел к горе.
Тогда за время t сек на гору поднимется υt м состава поезда и останется на горизонтальном пути l — υt м. Будем считать, что единица длины поезда весит γ.
Применяя формулы (48), найдем координаты центра тяжести поезда:



Координаты центра тяжести представлены здесь как функции времени, следовательно, полученные соотношения являются уравнениями движения центра тяжести поезда. Определяя t (или υt) из первого уравнения и подставляя во второе, найдем уравнение траектории:

Ответ. Парабола.
Задача №4
Мостовой кран движется вдоль цеха согласно уравнению х = t; по крану катится в поперечном направлении тележка согласно уравнению у = 1,5t (х и у—в м, t — в сек). Цепь укорачивается со скоростью t>=0,5. Определить траекторию центра тяжести груза (в начальном положении центр тяжести груза находился в горизонтальной плоскости хОу, ось Oz направлена вертикально вверх).
Решение. В условии задачи даны лишь два уравнения движения и вертикальная скорость груза:

откуда dz = 0,5dt, и легко получаем третье уравнение:
z = 0,5t
Определив t из первого уравнения, подставим во второе и в третье:
y= 1,5x, z = 0,5x
Координаты груза должны удовлетворять одновременно обоим уравнениям, т. е. траектория лежит одновременно в обеих плоскостях и является линией их пересечения.
Ответ. Прямая.
Алгебраическая величина скорости проекции точки на координатную ось равна первой производной от текущей координаты по времени:

Алгебраическая величина скорости проекции точки на ось
Пусть движение точки M определяется тремя уравнениями:
x =x(t), (58′)
y = y(t), (58″)
z = z(t). (58″‘)
По мере движения точки M в пространстве ее проекции P, Q и R движутся по своим прямолинейным траекториям, т. е. по осям координат, и их движения вполне соответствуют движению точки М.
Так, координата (абсцисса) точки P всегда равна абсциссе точки М, а координаты точек QnR всегда равны ординате и аппликате точки М. Следовательно, при движении точки M в пространстве согласно уравнениям (58) точка P движется по оси Ox согласно уравнению (58′), а точки Q и R— соответственно по осям Oy и Oz согласно уравнениям (58″) и (58″‘).
Таким образом, движение точки M в пространстве можно разложить на три прямолинейных движения ее проекций P, Q и R.
Определим скорость υp точки P при движении этой точки по ее прямолинейной траектории Ох, иными словами, определим скорость проекции точки M на ось Ох.
Алгебраическая величина скорости выражается по формуле (53), причем дифференциалом расстояния точки P является дифференциал абсциссы х, а поэтому
 (61)
(61)
Следовательно, алгебраическая величина скорости проекции P точки M на координатную ось равна первой производной от текущей координаты х по времени t. Она положительна, если точка P движется в положительном направлении оси Ох, и отрицательна, если точка P движется в отрицательном направлении.
Аналогично получаем алгебраические скорости проекций Q и R на ось Oy и на ось Oz:
 (61″)
(61″)
 (61″‘)
(61″‘)
Чтобы получить векторы скоростей проекций, надо умножить величины (61) на единичные векторы:
 (61)
(61)
Алгебраическая величина скорости проекции точки на ось равна проекции скорости той же точки на туже ось:
Скорость проекции и проекция скорости
Пусть точка М за бесконечно малый отрезок времени dt передвинулась по своей траектории на элемент дуги ds, абсолютную величину которого выразим формулой (60):

где dx, dy и dz — проекции элемента дуги на оси координат, или, Что то же, элементарные приращения координат точки М.
На рис. 87 эти элементы условно изображены конечными отрезками. Как видно из чертежа, косинусы углов, составляемых элементарным перемещением (а следовательно, и скоростью точки), с осями х, у и z соответственно равны
 (62)
(62)
Величина скорости точки M может быть определена по (53):

Чтобы определить проекцию скорости  на какую-либо ось, надо умножить абсолютную величину скорости на косинус угла между направлением скорости и направлением этой оси. Таким образом, для проекций скорости точки M на оси координат имеем:
на какую-либо ось, надо умножить абсолютную величину скорости на косинус угла между направлением скорости и направлением этой оси. Таким образом, для проекций скорости точки M на оси координат имеем:
 (63′)
(63′)
 (63″)
(63″)
 (63″‘)
(63″‘)
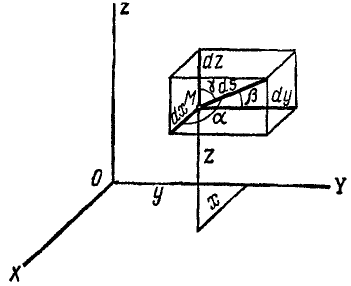
Рис. 87
Равенства (63) словами нужно читать так: проекция скорости точки на ось равна алгебраической скорости проекции точки на ту же ось.
Задача №5
Доказать, что проекция  скорости
скорости  точки M (х, у, z) иа плоскость хОу равняется скорости
точки M (х, у, z) иа плоскость хОу равняется скорости  , с которой движется по плоскости проекция M1 (х, у, О) точки M на ту же плоскость.
, с которой движется по плоскости проекция M1 (х, у, О) точки M на ту же плоскость.
Решение. Скорость точки M составляет с осью Oz угол γυ, следовательно, угол, составляемый ею с плоскостью хОу, равен 90° — yυ п косинус этого угла равен sinγυ. Поэтому модуль проекции скорости точки M на плоскость хОу
Подводя  под радикал и выражая cosγυ, по формуле (62), мы убедимся, что проекция скорости на плоскость равна по величине скорости проекции:
под радикал и выражая cosγυ, по формуле (62), мы убедимся, что проекция скорости на плоскость равна по величине скорости проекции:

Направления векторов  и
и  тоже совпадают, так как направляющие косинусы их одинаковы. Теорема доказана.
тоже совпадают, так как направляющие косинусы их одинаковы. Теорема доказана.
Модуль скорости точки равен квадратному корню из суммы квадратов проекций скорости на оси координат:
Модуль скорости. Возведем в квадрат каждое из равенств:
 (63)
(63)
и сложим их:

Сумма квадратов направляющих косинусов равна единице и

или
 (64)
(64)
Перед радикалом взят положительный знак, так как величина скорости (ее модуль) всегда положительна. В этом ее существенное отличие от алгебраической величины скорости (53), характеризующей скорость точки при движении по заданной траектории и имеющей знак « + » или «—» в зависимости от направления движения. Величину (64) иногда называют полной скоростью.
Направление скорости можно определить по направляющим косинусам скорости:

Направляющие косинусы скорости
Равенство (64) позволяет определить модуль скорости точки, движение которой задано уравнениями (58). Направление скорости определяется по косинусам углов, составляемых положительными направлениями осей координат с направлением скорости. Значения этих косинусов, называемых направляющими косинусами скорости, мы получим из уравнений (63):
 (62′)
(62′)
где  ,
,  и
и  — производные от х, у и z по t.
— производные от х, у и z по t.
Если точка движется в плоскости хОу, то γυ = 90o, cosγυ = 0 и cos αυ = sin βυ.
Задача №6
Уравнения движения суть

Определить траекторию и скорость.
Решение. Из уравнений движения следует, что х и у всегда больше нуля.
Для определения уравнения траектории возведем каждое из уравнений движения в квадрат и составим разность
x2 – у2 = a2
Для определения скорости найдем сначала ее проекции:


а затем уже и полную скорость.
Ответ. Траектория — ветвь гиперболы x2 – у2 = a2 — расположена в области положительных значений х; скорость  .
.
Задача №7
Движение точки задано уравнениями

причем ось Ox горизонтальна, ось Oy направлена по вертикали вверх, υ0, g и  —величины постоянные. Найти траекторию точки, координаты наивысшего ее положения, проекции скорости на координатные оси в тот момент, когда точка находится на оси Ох.
—величины постоянные. Найти траекторию точки, координаты наивысшего ее положения, проекции скорости на координатные оси в тот момент, когда точка находится на оси Ох.
Решение. Уравнения описывают движение тела, брошенного со скоростью υ0 под углом α0 к горизонту (к оси Ох).
Чтобы найти уравнение траектории, определим время из первого уравнения и подставим найденное значение во второе; получим
уравнение параболы, проходящей через начало координат (рис. 88).
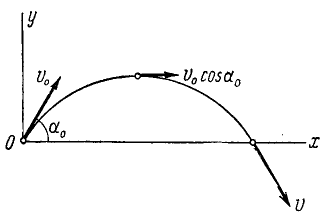
Рис. 88
Чтобы определить координаты наивысшего положения, мы можем применить известные из дифференциального исчисления правила нахождения максимума функции, т. е. взять производную  , приравняв ее нулю, определить значение х и, подставив его в уравнение траектории, определить соответствующее значение у, убедившись при этом, что вторая производная
, приравняв ее нулю, определить значение х и, подставив его в уравнение траектории, определить соответствующее значение у, убедившись при этом, что вторая производная  . Однако мы найдем координаты наивысшего положения точки другим методом, для чего, продифференцировав по времени уравнения движения точки, найдем проекции ее скорости:
. Однако мы найдем координаты наивысшего положения точки другим методом, для чего, продифференцировав по времени уравнения движения точки, найдем проекции ее скорости:

Первое из этих уравнений показывает, что проекция скорости на горизонтальную ось постоянна и равна проекции начальной скорости.
Исследование второго уравнения убеждает, что проекция скорости на вертикальную ось в начальное мгновение положительна и равна υ0 sin α0; затем, по мере увеличения t, проекция υy уменьшается, оставаясь положительной до мгновения  , когда υy обращается в нуль, после чего υy становится отрицательной, возрастая по абсолютной величине с течением времени t.
, когда υy обращается в нуль, после чего υy становится отрицательной, возрастая по абсолютной величине с течением времени t.
Таким образом, точка движется вправо, сначала поднимаясь, затем опускаясь. Мгновение  , при котором точка кончила подниматься, но еще не начала опускаться, соответствует максимальному подъему точки. В это мгновение скорость горизонтальна и
, при котором точка кончила подниматься, но еще не начала опускаться, соответствует максимальному подъему точки. В это мгновение скорость горизонтальна и  . Подставляя найденное значение t в уравнения движения, найдем координаты наивысшей точки траектории:
. Подставляя найденное значение t в уравнения движения, найдем координаты наивысшей точки траектории:

Определим проекции скорости в мгновение, когда точка находится на оси Ох. В это мгновение ордината точки равна нулю. Приравняем пулю второе из уравнений движения:

Точка находится на оси Ox два раза: при t=0 при 
Первое значение t соответствует началу движения, второе —падению точки на ось Ох. Второе значение равно времени всего полета, и оно вдвое больше полученного нами ранее времени наивысшего подъема: время падения равно времени подъема.
Подставляя значение t=0 в уравнения, определяющие проекции скорости, найдем проекции скорости в начальное мгновение:
υx = + υ0 cos α0, υy = + υ0 sin α0.
Подставляя второе из найденных значений t, найдем скорости в момент падения:
υx = + υ0 cos α0, υy = – υ0 sin α0.
Ответ: 1) Парабола 
2) 
3) υx = υ0 cos α0, υy =  υ0 sin α0.
υ0 sin α0.
причем верхний знак соответствует началу движения, а нижний—концу.
Задача №8
По осям координат (рис. 89) скользят две муфты A и B, соединенные стержнем AB длиной l. Скорость В равна υB.
При каком положении муфт скорость муфты А вдвое больше υB?
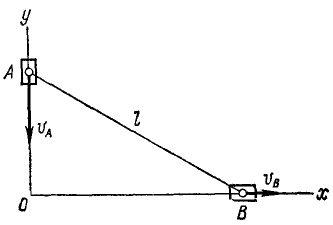
Рис. 89
Решение. Координата точки А связана с координатой точки В соотношением
Считая х и у функциями времени и продифференцировав это равенство по времени, найдем зависимость между скоростями обеих точек:
Но  и по условию надо, чтобы величина
и по условию надо, чтобы величина  была равна 2υB, т. е.
была равна 2υB, т. е.
откуда после алгебраических преобразований получаем ответ.
Ответ:  (см. задачи № 57 и 89, где даны другие решения).
(см. задачи № 57 и 89, где даны другие решения).
Проекция ускорения точки на координатную ось равна первой производной по времени от проекции скорости на ту же ось или второй производной от текущей координаты по времени:

Ускорение проекции и проекция ускорения
Ускорение характеризует изменение скорости точки в данное мгновение. Оно выражается пределом отношения изменения вектора скорости к соответствующему промежутку времени при стремлении этого промежутка времени к нулю.
Для того чтобы определить ускорение точки M при ее движении в пространстве, рассмотрим сначала движение по оси Ox точки Р, являющейся проекцией точки M на эту ось.
Пусть в некоторое мгновение t алгебраическая величина скорости точки P была υх, а в мгновение tl = t + Δt стала υx+∆υx. Тогда ускорение точки P по величине и по знаку выразится пределом
Если знаки υx и ap одинаковы, то движение точки P ускоренное, а если различны, то замедленное.
Аналогично выразятся ускорения проекций Q и R точки M на другие координатные оси:
Проекции υx, υy и υz сами являются производными по времени от координат точки, поэтому ускорения проекций можно выразить вторыми производными по времени от координат точки. Эти равенства характеризуют не только величины, но и знаки ускорений проекций. Иными словами, они выражают изменение алгебраических скоростей проекций P, Q и R в мгновение t.
Только что доказанная теорема о равенстве алгебраической скорости проекции точки на ось и проекции скорости той же точки на ту же ось справедлива для любого момента времени. Следовательно, эта теорема относится не только к скорости, но и к ее изменению в любое мгновение, т. е. к ускорению. Это значит, что написанные выше равенства выражают также проекции ax, ау и аz ускорения а точки M на оси координат Ox, Oy и Oz:
 (65)
(65)
где cosαa, cosβa и cosγa—направляющие косинусы ускорения.
Можно рассматривать эти величины (65) как векторы, направленные по осям координат:
 (65′)
(65′)
Модуль ускорения точки равен квадратному корню из суммы квадратов проекций ускорения на оси координат:
Величина ускорения при координатном способе задания движения точки
Возведем в квадрат каждое из равенств:
и затем сложим их:

откуда
 (66)
(66)
Перед радикалом взят знак плюс, так как модуль вектора—величина положительная. Ускорение точки в отличие от проекций ускорения на оси координат или на другие направления обычно называют полным ускорением. Поэтому равенство (66) можно прочитать так: величина полного ускорения точки равна квадратному корню из суммы квадратов его проекций на оси координат.
Направление ускорения можно определить по направляющим косинусам ускорения:
 ,
, 
Направляющие косинусы ускорения
Направление ускорения определяют по косинусам углов, составляемых положительными направлениями осей координат с вектором ускорения. Формулы направляющих косинусов получаем из уравнений (65):
 (67′)
(67′)
 (67”)
(67”)
 (67”’)
(67”’)
Для определения направления ускорения в каждом конкретном случае надо сначала найти ускорение проекций по (65), для чего необходимо дважды продифференцировать уравнения движения (58), затем найти величину ускорения по (66), а потом определить направляющие косинусы ускорения по (67).
Направление ускорения обычно не совпадает с направлением скорости, и направляющие косинусы (67) ускорения только при прямолинейном ускоренном движении точки постоянно равны направляющим косинусам (62) скорости.
Если точка движется в плоскости хОу, то γa = 90o, cosγa = 0, cosα0 = sin βa.
Задача №9
Точка M движется в системе координат хОу согласно уравнениям х= r cos πt, y=r sinπt, где х и у—в см, a t — в сек. Найти уравнение траектории точки М, ее скорость, направляющие косинусы скорости, ускорение, направляющие косинусы ускорения. Для значений времени t=0; 0,25; 0,5; 0,75, …. 2 сек дать чертежи положений точки M, вектора скорости и вектора ускорения.
Решение. Из уравнения движения видно, что координаты точки M являются проекциями на соответствующие оси радиуса-вектора r, составляющего с осью абсцисс угол πt:

Для определения траектории точки исключаем время из уравнений движения. Получаем уравнение окружности
x2 + y2 = r2
Найдем теперь проекции скорости на оси координат, для чего продифференцируем по времени уравнения движения:
откуда по (64) получаем модуль скорости
Величина скорости точки M постоянна.
Направляющие косинусы скорости определим по формуле (62′):
Эти соотношения показывают, что направление скорости непрерывно меняется и что скорость перпендикулярна радиусу-вектору, проведенному из центра О в точку М.
Ускорение точки M найдем по его проекциям, для чего продифференцируем выражения, полученные для проекций скорости:

откуда по (66) получаем величину ускорения

Ускорение характеризует быстроту изменения вектора скорости не только по величине, но и по направлению, поэтому, несмотря на постоянство модуля скорости точки М, ускорение этой точки не равно нулю. Как видно из полученного
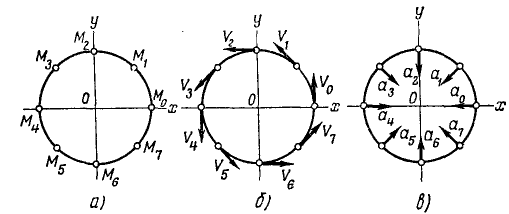
Рис. 90
равенства, величина полного ускорения постоянна. Направление ускорения определим по направляющим косинусам согласно (67):

Направление ускорения точки M противоположно направлению радиуса-вектора.
Положения точки M в различные мгновения показаны на рис. 90, а, векторы скорости — на рис. 90,6 и векторы ускорения — на рис. 90, в.
Ответ. Точка M движется по окружности радиуса r против часовой стрелки с постоянной по величине скоростью υ = rπ и с постоянным по величине ускорением a = rπ2.
Задача №10
Снаряд выбрасывается из орудия с начальной скоростью υ=1600 м/сек под утлом α0 = 55o к горизонту. Определить теоретическую дальность и высоту обстрела, учитывая, что ускорение свободно падающих тел g = 9,81 м/сек2.
Решение. Сначала составим уравнения движения снаряда в координатной форме, направив оси, как показано на чертеже (см. рис. 88), для этого определим проекции ускорения:

Разделив переменные, интегрируем:
υх= С1, υy = – gt + С2
Подставляя вместо переменных величин их начальные значения, увидим, что C1 и C2 равны проекциям начальной скорости:
1600 cos 55o = C1, 1600 sin 55o = – gt + C2.
Подставим их в уравнения, полученные для проекций скорости:
Разделяя переменные и интегрируя, найдем


При t = 0 координаты снаряда были: х =0, у = 0. Подставляя эти данные, найдем, что C3 = O и C4 = O. Значения cos 55° и sin 55° найдем в тригонометрических таблицах. Уравнения движения снаряда примут вид:

Далее поступим, как при решении задачи № 42: приравняв вертикальную скорость нулю, найдем время подъема снаряда (t= 133,7 сек); подставляя это значение t в уравнение движения по оси Оу, найдем теоретическую высоту обстрела (h = 87 636 м); удваивая время /, найдем время полета снаряда (t = 267,4 сек); подставляя это значение- в уравнение движения по оси Ох, найдем теоретическую дальность обстрела (l = 245 393 м).
Ответ. l = 245 км; h = 87,5κм.
- Касательное и нормальное ускорения точки
- Основные законы динамики
- Колебания материальной точки
- Количество движения
- Пара сил в теоретической механике
- Приведение системы сил к данной точке
- Система сил на плоскости
- Естественный и векторный способы определения движения точки
