Ускорение центра масс
Теорема о движении центра масс является общей теоремой динамики, она утверждает, что ускорение центра масс не зависит от действия внутренних сил.
Ускорение центра масс согласно теореме движения центра масс, определяется как сумма внешних сил (по отношению к системе), при этом принято считать, что силы приложены к некой материальной точке, расположенной в центре масс.
При поступательном движении любого твердого тела, ускорение всех его точек независимо от момента времени одинаково и, таким образом, эквивалентно ускорению центра масс. Исходя из этого, теорему движения центра масс можно использовать для исследования и решения задач поступательного движения твердых тел.
Ускорение центра масс формула
Общий вид:
а =∑F
Скатывание шара по наклонной поверхности:


Пример возможных задач
Найти линейное ускорение центра масс некого шара, который скатывается без скольжения по наклонной плоскости. Угол наклона 20 град., начальная скорость шара 0.
Ответ
В виду того, что шар находится в неподвижном состоянии, сила трения принимается равной 0. Таким образом, решение задачи сводится к уравнению:
а = g*sin(α) = 9.81*sin(20) = 9.81*0.34 = 3,3354 м/с2
Содержание:
Принцип Даламбера для материальной точки:
Законы Ньютона содержат в себе все необходимое для рассмотрения движения любых механических систем. Но первоначально они применялись только для рассмотрения движения свободной материальной точки и свободного твердого тела до тех пор, пока не была дополнительно сформулирована аксиома связей. Для рассмотрения движения несвободных систем Даламбер предложил специальный принцип, получивший название принципа Даламбера. Этот принцип был сформулирован в терминах «потерянных» движений.
В настоящее время, когда считается справедливой аксиома связей, уравнения движения несвободной материальной точки являются такими же, как и для свободной, только к действующим на точку активным или заданным силам добавляют силы реакций связей.
Современное выражение принципа Даламбера не отличается по содержанию от уравнений движения материальной точки, но для многих задач оно более удобно. Принцип Даламбера для свободной материальной точки эквивалентен основному закону динамики. Для несвободной точки он эквивалентен основному закону вместе с аксиомой связей.
Уравнение движения материальной точки массой m относительно инерциальной системы отсчета под действием приложенных активных сил и реакций связей имеет вид

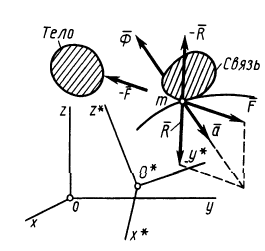
Рис. 82
Сила  является _ равнодействующей активных сил,
является _ равнодействующей активных сил,  — равнодействующей реакций связей,
— равнодействующей реакций связей,  — ускорением точки относительно инерциальной системы отсчета. Назовем силой инерции материальной точки произведение массы точки на вектор ускорения, взятое с обратным знаком, т.е.
— ускорением точки относительно инерциальной системы отсчета. Назовем силой инерции материальной точки произведение массы точки на вектор ускорения, взятое с обратным знаком, т.е.  . Если использовать понятие силы инерции точки и перенести все слагаемые (1) в правую часть уравнения, то получим
. Если использовать понятие силы инерции точки и перенести все слагаемые (1) в правую часть уравнения, то получим

Так как силы , и  (рис. 82) образуют систему сходящихся сил и удовлетворяют условию (2), то они являются системой сил, эквивалентной нулю, т. е.
(рис. 82) образуют систему сходящихся сил и удовлетворяют условию (2), то они являются системой сил, эквивалентной нулю, т. е.

Уравнение (2) или эквивалентное ему условие (3) выражает принцип Даламбера для точки: при движении материальной точки активные силы и реакции связей вместе с силой инерции точки образуют равновесную систему сил.
Из (2) в проекциях на координатные оси получаем три условия равновесия сил:

Ускорение точки относительно инерциальной системы отсчета. можно разложить на составляющие по осям декартовой системы координат, а также на касательное и нормальное ускорения и на переносное, относительное ускорения и ускорение Кориолиса, если движение точки считать сложным, состоящим из переносного и относительного. Соответственно силу инерции  можно разложить на такие же составляющие:
можно разложить на такие же составляющие:

Касательная сила инерции
где  — касательное ускорение; нормальная, или центробежная, сила инерции
— касательное ускорение; нормальная, или центробежная, сила инерции
где  — нормальное ускорение. Переносная и относительная силы инерции, а также сила инерции Кориолиса через ускорения выражаются соответственно так:
— нормальное ускорение. Переносная и относительная силы инерции, а также сила инерции Кориолиса через ускорения выражаются соответственно так:

Аналогично выражаются через проекции ускорения на прямоугольные оси координат проекции силы инерции  . На силы инерции существует несколько точек зрения. Согласно первой точке зрения, сила инерции условно прикладывается к точке, чтобы уравнению движения (1) придать более удобную форму условия равновесия (2). Поэтому силу инерции называют фиктивной, даламберовой, условной и т. д. С этой точки зрения силы инерции в принципе Даламбера не являются настоящими, реальными силами и отличаются не только от обычных сил, создаваемых действием тел, но даже и от сил инерции в относительном движении.
. На силы инерции существует несколько точек зрения. Согласно первой точке зрения, сила инерции условно прикладывается к точке, чтобы уравнению движения (1) придать более удобную форму условия равновесия (2). Поэтому силу инерции называют фиктивной, даламберовой, условной и т. д. С этой точки зрения силы инерции в принципе Даламбера не являются настоящими, реальными силами и отличаются не только от обычных сил, создаваемых действием тел, но даже и от сил инерции в относительном движении.
Согласно другой, наиболее распространенной точке зрения, сила инерции считается приложенной по частям к «ускоряющим» телам. Для обоснования приводят следующие рассуждения. Материальная точка движется с ускорением  потому что на нее действуют какие-то тела с силой, равной
потому что на нее действуют какие-то тела с силой, равной  (см. рис. 83). По закону о равенстве сил действия и противодействия материальная точка должна оказывать противодействие этим телам с такой же по модулю, но противоположной по направлению силой —
(см. рис. 83). По закону о равенстве сил действия и противодействия материальная точка должна оказывать противодействие этим телам с такой же по модулю, но противоположной по направлению силой —  , которая, согласно (2), равна силе инерции , т.е.
, которая, согласно (2), равна силе инерции , т.е.  .
.
Это соотношение дает основание считать, что сила инерции приложена к «ускоряющим» телам, т. е. телам, которые сообщают точке ускорение.
Действительно, сила инерции является векторной суммой сил действия точки на «ускоряющие» ее тела. Она служит суммарной оценкой этого действия. Однако при рассмотрении относительного движения_точки вводятся переносная  и кориолисова силы инерции
и кориолисова силы инерции  . Для подвижного наблюдателя их следует считать приложенными к движущейся материальной точке, но для них невозможно указать материальные тела, действием которых на точку можно объяснить эти силы.
. Для подвижного наблюдателя их следует считать приложенными к движущейся материальной точке, но для них невозможно указать материальные тела, действием которых на точку можно объяснить эти силы.
Переносная и кориолисова силы инерции являются частью полной силы инерции . Если для части силы невозможно указать тела, которые ее создают, то это же справедливо и для всей силы инерции . Однако в рассматриваемом случае указывается материальный объект, который действует с силой инерции на ускоряющие тела. Этим объектом является движущаяся с ускорением материальная точка.
Согласно третьей точке зрения, силу инерции считают приложенной к движущейся материальной точке, по крайней мере это справедливо для наблюдателя, который находится в собственной системе отсчета этой точки. Собственной системой отсчета материальной точки называют такую систему отсчета, относительно которой точка находится в покое, т. е. относительно которой ее относительные скорость и ускорение равны нулю. В этой системе отсчета справедливо условие относительного равновесия для сил
где  — переносная сила инерции в собственной системе отсчета. Но в собственной системе отсчета
— переносная сила инерции в собственной системе отсчета. Но в собственной системе отсчета  и кориолисово ускорение
и кориолисово ускорение  , а тогда
, а тогда  и, следовательно,
и, следовательно,  .
.
Таким образом, принцип Даламбера есть условие относительного равновесия для сил в собственной системе отсчета. Относительно собственного наблюдателя сила инерции  приложена к движущейся точке, а следовательно, к ней приложена и совпадающая с перенорной силой инерции в собственной системе отсчета
приложена к движущейся точке, а следовательно, к ней приложена и совпадающая с перенорной силой инерции в собственной системе отсчета  сила инерции абсолютного движения . Силу в этом случае считают дополнительным действием на точку поля Вселенной. Такая точка зрения на силы инерции требует изменения понятия приложенной силы и изменения некоторых основных аксиом динамики (см. Приложение).
сила инерции абсолютного движения . Силу в этом случае считают дополнительным действием на точку поля Вселенной. Такая точка зрения на силы инерции требует изменения понятия приложенной силы и изменения некоторых основных аксиом динамики (см. Приложение).
Принцип Даламбера для системы материальных точек
Рассмотрим систему  материальных точек. К каждой точке системы в общем случае приложены равнодействующая активных сил и равнодействующая реакций связей. Применяя принцип Даламбера к каждой точке системы, получим
материальных точек. К каждой точке системы в общем случае приложены равнодействующая активных сил и равнодействующая реакций связей. Применяя принцип Даламбера к каждой точке системы, получим

где  — сила инерции для
— сила инерции для  -й точки (рис.83). Условия (6) можно представить в эквивалентной форме:
-й точки (рис.83). Условия (6) можно представить в эквивалентной форме:

N векторных условий (6) или (7) выражают принцип Даламбера для системы: при движении механической системы активная сила и реакция связей вместе с силой инерции составляют равновесную систему сил для каждой точки системы.
Принцип Даламбера для системы по своему содержанию не отличается от уравнений движения точек системы.
Представим равнодействующую силу, приложенную к каждой точке системы, разложенной не на активную силу и реакцию связей, а на внутреннюю и внешнюю силы по
отношению ко всей системе:

Тогда принцип Даламбера для системы можно представить в другой форме:

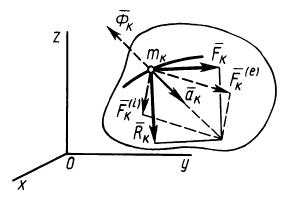
Рис. 83
Из принципа Даламбера для системы в форме (6) или (8) можно получить следствия в виде шести условии равновесия для сил, действующих на точки системы, и сил инерции.
Если просуммировать левые части (6) по всем точкам системы, то

Умножая векторно каждое из соотношений (6) слева на радиус-вектор точки  и опять суммируя по точкам системы, получаем
и опять суммируя по точкам системы, получаем
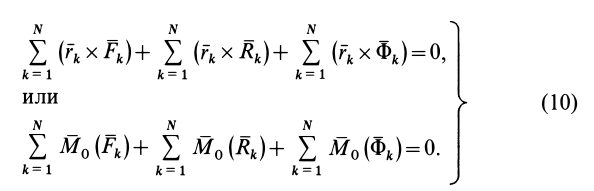
Следствие из принципа Даламбера (10) справедливо как для неподвижной в рассматриваемой инерциальной системе отсчета точки, так и движущейся, так как начало радиусов-векторов можно выбирать в любой точке.
Условия (9) и (10), если выразить их через проекции на координатные оси, дадут шесть условий равновесия, аналогичных условиям равновесия сил, приложенных к твердому телу, в статике.
Если использовать принцип Даламбера в форме (8), то получим следствия в форме
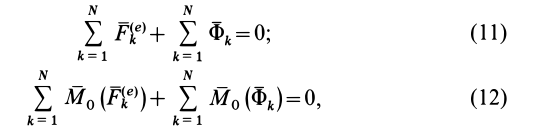
так как внутренние силы системы по свойству этих сил удовлетворяют условиям
Если спроецировать (11) и (12) на координатные оси, то опять получим шесть условий равновесия для сил. Особенностью условий равновесия сил в форме (11) и (12) является отсутствие в них внутренних сил, что делает их особенно удобными при решении многих задач динамики системы.
В действительности условие (11) представляет собой теорему об изменении количества движения, а (12) — теорему об изменении кинетического момента для системы, если их представить в форме
Сравнивая (11) с (11′) и (12) с (12′), получаем формулы для вычисления главных вектора и момента сил инерции системы через количество движения и кинетический момент:
В (12′) точка  неподвижна в выбранной инерциальной системе отсчета. Следовательно, по формуле (14) можно вычислить главный момент сил инерции только для неподвижной точки
неподвижна в выбранной инерциальной системе отсчета. Следовательно, по формуле (14) можно вычислить главный момент сил инерции только для неподвижной точки  . Для движущейся точки вместо (12′) следует использовать ранее доказанную теорему об изменении кинетического момента для движущейся точки
. Для движущейся точки вместо (12′) следует использовать ранее доказанную теорему об изменении кинетического момента для движущейся точки  :
:

После замены в (12) точки  на
на  и сравнения с (12″) получим формулу для вычисления главного момента сил инерции относительно движущейся точки
и сравнения с (12″) получим формулу для вычисления главного момента сил инерции относительно движущейся точки  :
:

В формуле (14′)  и
и  — соответственно скорости точки
— соответственно скорости точки  и центра масс
и центра масс  относительно рассматриваемой инерциальной системы отсчета;
относительно рассматриваемой инерциальной системы отсчета;  — масса системы.
— масса системы.
Так как  , то для главного вектора сил инерции получаем формулу
, то для главного вектора сил инерции получаем формулу

Здесь — масса системы,  и
и  — скорость и ускорение центра масс соответственно.
— скорость и ускорение центра масс соответственно.
В тех случаях движения твердого тела, когда силы инерции приводятся к равнодействующей, последняя совпадает по модулю и направлению с главным вектором этих сил. Но равнодействующая сил инерции необязательно проходит через центр масс тела, хотя ее модуль и направление всегда определяются по формуле (15).
Проецируя векторы из (14) на ось  , получаем
, получаем

Аналогичные формулы можно получить и для других координатных осей. В случае вращения твердого тела вокруг неподвижной оси  , как известно,
, как известно,
Подставляя это значение  в (14″), имеем
в (14″), имеем

или

По формуле (16) вычисляют момент сил инерции относительно оси вращения при вращательном движении твердого тела вокруг неподвижной оси. Этот момент создают касательные силы инерции, так как нормальные силы инерции для каждой точки тела пересекают ось вращения и, следовательно, момента не создают.
Из принципа Даламбера для системы можно получить еще одно следствие — теорему об изменении кинетической энергии. Для этого умножаем (8) скалярно на  и суммируем полученные соотношения по всем точкам. Получаем
и суммируем полученные соотношения по всем точкам. Получаем

или в других обозначениях

Сравнивая (17) с теоремой об изменении кинетической энергии системы в дифференциальной форме

получаем выражение для суммы элементарных работ сил инерции через кинетическую энергию системы  :
:

Интегрируя (18), получаем

Таким образом, сумма работ сил инерции на каком-либо перемещении системы равна изменению кинетической энергии на этом перемещении, взятому с обратным знаком.
Силы инерции твердого тела в частных случаях его движения
Методы решения задач динамики с использованием сил инерции называют кинетостатическими.
При поступательном движении
Если твердое тело движется поступательно, то ускорения его точек одинаковы. Силы инерции этих точек составляют систему параллельных сил, направленных в одну сторону. Такая система сил приводится к равнодействующей силе  , которая равна главному вектору, т. е.
, которая равна главному вектору, т. е.

Линия действия равнодействующей силы инерции в этом случае проходит через центр масс, так как главный момент сил инерции точек тела относительно центра масс
Действительно, согласно следствию из принципа Даламбера (12) для центра масс, имеем
При поступательном движении тело не совершает вращения вокруг центра масс и поэтому  . Следовательно, и
. Следовательно, и  .
.
При вращении вокруг неподвижной оси
Если выбрать за центр приведения сил инерции точку  на оси вращения
на оси вращения  , то в этой точке получим главный вектор и главный момент сил инерции:
, то в этой точке получим главный вектор и главный момент сил инерции:

Если центр масс находится на оси вращения, то  . Проекции главного момента сил инерции на неподвижные оси координат в общем случае можно вычислить по формулам
. Проекции главного момента сил инерции на неподвижные оси координат в общем случае можно вычислить по формулам

Моменты сил инерции  и
и  вычисляются в следующем параграфе. Они равны нулю, если ось
вычисляются в следующем параграфе. Они равны нулю, если ось  является главной осью инерции для точки .
является главной осью инерции для точки .
При плоском движении
Выбрав за центр приведения сил инерции центр масс, получим в этой точке главный вектор и главный момент сил инерции. Для главного вектора сил инерции имеем
Для главного момента сил инерции относительно центра масс С, который является движущейся точкой при плоском движении тела, получим формулы, аналогичные формуле (14), выведенной для неподвижной точки .
Согласно следствию из принципа Даламбера (12), главный момент сил инерции относительно центра масс удовлетворяет условию
С другой стороны, из теорем об изменении кинетического момента относительно центра масс для абсолютного и относительного движений имеем

Из этих соотношений следует

Проекции  ,
,  на оси координат с началом в центре масс и движущиеся поступательно вместе с центром масс соответственно
на оси координат с началом в центре масс и движущиеся поступательно вместе с центром масс соответственно

где ось  перпендикулярна плоскости, параллельно которой совершают движение точки тела.
перпендикулярна плоскости, параллельно которой совершают движение точки тела.
Моменты сил инерции и вычисляются так же, как и при вращении тела вокруг неподвижной оси. Они равны нулю, если ось  является главной осью инерции для точки
является главной осью инерции для точки  . Это, в частности выполняется, если тело имеет плоскость симметрии, проходящую через центр масс и параллельную плоскости движения тела.
. Это, в частности выполняется, если тело имеет плоскость симметрии, проходящую через центр масс и параллельную плоскости движения тела.
Пример 1. Груз  силой тяжести
силой тяжести  опускается вниз по грани призмы с силой тяжести
опускается вниз по грани призмы с силой тяжести  , приводя в движение груз
, приводя в движение груз  , имеющий силу тяжести
, имеющий силу тяжести  , с помощью нити, перекинутой через невесомый блок
, с помощью нити, перекинутой через невесомый блок  .
.
Считая пол, грани призмы и грузов гладкими, определить давление призмы на пол и выступ, препятствующий перемещению призмы, а также силу натяжения нити. Углы наклона боковых граней призмы  и
и  (рис. 84,а,б).
(рис. 84,а,б).
Решение. Применим к системе, состоящей из призмы, грузов, нити и блока, следствия из принципа Даламбера, составив условия равновесия внешних сил и сил инерции системы.
Предположим, что ускорение груза  направлено вниз и равно
направлено вниз и равно  . Для абсолютных значений сил инерции грузов и
. Для абсолютных значений сил инерции грузов и  соответственно имеем
соответственно имеем
Направления сил инерции  и
и  указаны на рисунке.
указаны на рисунке.
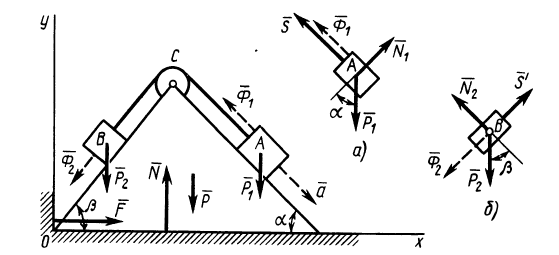
Рис. 84
Составляя условия равновесия внешних сил системы  и сил инерции и в проекциях на координатные оси
и сил инерции и в проекциях на координатные оси  ,
,  получим:
получим:
для 
для 

Из этих уравнений имеем а.
Для определения силы натяжения нити  и ускорения грузов применим принцип Даламбера к каждому грузу в отдельности, составив условия равновесия внешних сил грузов и сил инерции на направление нити. Получим:
и ускорения грузов применим принцип Даламбера к каждому грузу в отдельности, составив условия равновесия внешних сил грузов и сил инерции на направление нити. Получим:
для груза  (рис. 84, а)
(рис. 84, а)

для груза  (рис. 85,6)
(рис. 85,6)

так как  для случая невесомого блока. Из (б) и (б’), исключая , определяем
для случая невесомого блока. Из (б) и (б’), исключая , определяем  :
:

Для того чтобы груз двигался вниз, должно выполняться условие  или
или

Подставляя полученное значение  в (а), получаем
в (а), получаем


Давление призмы на выступ, согласно закону о равенстве сил действия и противодействия, будет  ; давление призмы на пол
; давление призмы на пол  .
.
Для определения натяжения нити  следует подставить значение ускорения а в одно из уравнений (б) или (б’). Тогда
следует подставить значение ускорения а в одно из уравнений (б) или (б’). Тогда

Пример 2. Однородный тонкий стержень  силой тяжести
силой тяжести  и длиной
и длиной  жестко скреплен с вертикальным валом
жестко скреплен с вертикальным валом  под углом а (рис. 85,а). Вал
под углом а (рис. 85,а). Вал  вместе со стержнем
вместе со стержнем  вращается с постоянной угловой скоростью
вращается с постоянной угловой скоростью  .
.
Определить реакции стержня в заделке  .
.
Решение. Применим к внешним силам и силам инерции стержня  следствия из принципа Даламбера в форме условий равновесия сил. Неизвестные реакцию
следствия из принципа Даламбера в форме условий равновесия сил. Неизвестные реакцию  и векторный момент в заделке
и векторный момент в заделке  разложим по осям координат.
разложим по осям координат.
Если разбить весь стержень на элементарные участки одинаковой длины, то ускорения середин этих участков распределятся вдоль стержня по линейному закону (рис. 85,6), так как ускорение каждой точки стержня  , где
, где  — расстояние
— расстояние  -й точки до оси вращения. Силы инерции элементарных участков стержня, принимаемых за точки, распределятся тоже по линейному закону, образуя треугольник. Распределенные так параллельные силы имеют равнодействующую силу, линия действия которой отстоит от основания треугольника на расстоянии
-й точки до оси вращения. Силы инерции элементарных участков стержня, принимаемых за точки, распределятся тоже по линейному закону, образуя треугольник. Распределенные так параллельные силы имеют равнодействующую силу, линия действия которой отстоит от основания треугольника на расстоянии  по стержню и
по стержню и  от вершины треугольника. Равнодействующая сила
от вершины треугольника. Равнодействующая сила  всегда равна главному вектору
всегда равна главному вектору  распределенных по треугольнику сил. Для главного вектора сил инерции имеем
распределенных по треугольнику сил. Для главного вектора сил инерции имеем
где  — ускорение центра масс стержня, т. е. его средней точки. Таким образом,
— ускорение центра масс стержня, т. е. его средней точки. Таким образом,
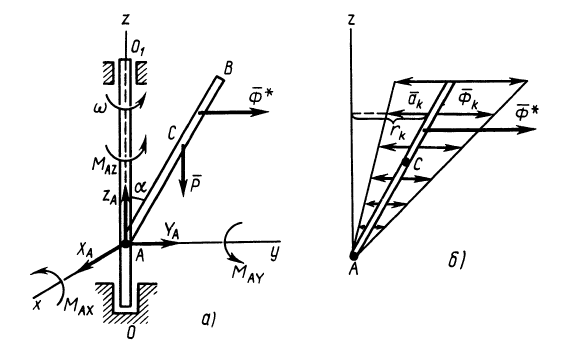
Рис. 85
Составим шесть условий равновесия сил, приняв, что стержень в рассматриваемый момент времени находится в координатной плоскости  . Тогда для проекций сил и моментов их относительно осей координат
. Тогда для проекций сил и моментов их относительно осей координат  имеем:
имеем:
Подставляя в эти уравнения значение  и решая их относительно неизвестных, получаем:
и решая их относительно неизвестных, получаем:
Для силы реакции и момента в заделке имеем
Принцип Д’Аламбера
Представим себе находящуюся в движении любую несвободную систему материальных точек  с массами
с массами  (рис. 302).
(рис. 302).
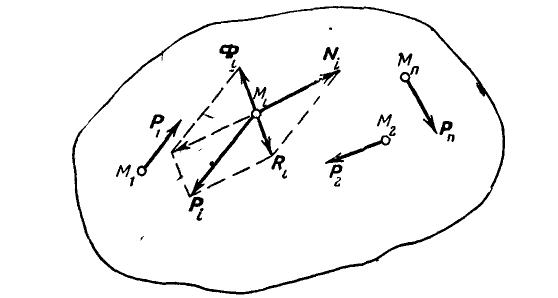
Рис. 302.
Обозначим равнодействующие задаваемых сил, приложенных к каждой точке системы  соответственно через
соответственно через  . Рассмотрим в некоторый момент какую-либо точку системы
. Рассмотрим в некоторый момент какую-либо точку системы  .
.
Если бы точка  не была связана с другими точками системы, то ее ускорение было бы
не была связана с другими точками системы, то ее ускорение было бы  но при наличии связей ее с другими точками системы ускорение будет иным.
но при наличии связей ее с другими точками системы ускорение будет иным.
Пусть равнодействующая всех сил, с которыми остальные точки системы действуют на точку  , будет сила
, будет сила  тогда точку
тогда точку  можно рассматривать как свободную, находящуюся под действием сил:
можно рассматривать как свободную, находящуюся под действием сил:  и
и  . Сложив эти силы по правилу параллелограмма, найдем их равнодействующую
. Сложив эти силы по правилу параллелограмма, найдем их равнодействующую  , и основное уравнение динамики запишется так:
, и основное уравнение динамики запишется так:
Перепишем его в форме:  . Член
. Член  , очевидно, имеет размерность силы. Обозначив
, очевидно, имеет размерность силы. Обозначив  замечаем, что последнее уравнение, переписанное в форме
замечаем, что последнее уравнение, переписанное в форме  , является уравнением равновесия сил
, является уравнением равновесия сил  и
и  , или, что то же, сил
, или, что то же, сил  и
и  .
.
Назовем вектор  силой инерции точки
силой инерции точки  и тогда можем сказать, что силы, приложенные к материальной точке, и реакции связей уравновешиваются силой инерции. Или, что то же, реакция связей
и тогда можем сказать, что силы, приложенные к материальной точке, и реакции связей уравновешиваются силой инерции. Или, что то же, реакция связей  уравновешивается силами
уравновешивается силами  и
и  .
.
Поступая аналогично с остальными точками системы, путем присоединения силы инерции к каждой точке, приходим к следующему началу д’Аламбера, которое читается так:
Если в какой-либо момент к движущейся системе материальных точек приложить все силы, действующие на нее в этот момент, и все силы инерции, то система будет в равновесии; при этом все реакции связей будут те же самые, которые имеют место при движении.
- Заказать решение задач по теоретической механике
Таким образом, начало д’Аламбера, изложенное в «Трактате по динамике» (1743 г.), дает очень удобный прием решения задач динамики для случаев, когда системы являются связанными, т. е. подчиненными связям. Путем присоединения к точкам системы фиктивных сил инерции задача динамики легко сводится к соответствующей задаче статики.
Прикладывая к точкам системы силы инерции, последние приходится при решении задач складывать по правилам статики. Особенно просто складываются силы инерции при поступательном движении твердого тела. В этом случае параллельные между собой и направленные в одну сторону силы инерции заменяются одной силой:  , приложенной в центре тяжести тела, так как центр параллельных сил инерции совпадает с центром тяжести. Последнее доказывается тем, что при одновременном повороте всех сил инерции вертикально вниз и умножении их на
, приложенной в центре тяжести тела, так как центр параллельных сил инерции совпадает с центром тяжести. Последнее доказывается тем, что при одновременном повороте всех сил инерции вертикально вниз и умножении их на  мы получаем взамен сил инерции силы тяжести точек тела. Иногда бывает полезно силу инерции точки в криволинейном ее движении представить в виде нормальной
мы получаем взамен сил инерции силы тяжести точек тела. Иногда бывает полезно силу инерции точки в криволинейном ее движении представить в виде нормальной  и касательной
и касательной  составляющих:
составляющих:

направленных соответственно в сторону, противоположную нормальному и касательному ускорениям.
Примеры решения задач на принцип Даламбера
Для уяснения изложенного разберем сначала несколько задач на применение начала д’Аламбера к одной материальной точке, а затем уже к системам материальных точек.
Задача №1
На арочный мост АВ, имеющий в точках А и В неподвижные опоры, расположенные на одной горизонтали, въезжает автомобиль весом Q = 3000 кГ с постоянной скоростью  . Проезжая часть моста описана по дуге окружности радиуса
. Проезжая часть моста описана по дуге окружности радиуса  . Определить наибольшие давления
. Определить наибольшие давления  и
и  автомобиля на мост в двух случаях, когда проезжая часть моста направлена соответственно выпуклостью кверху и книзу (рис. 303).
автомобиля на мост в двух случаях, когда проезжая часть моста направлена соответственно выпуклостью кверху и книзу (рис. 303).
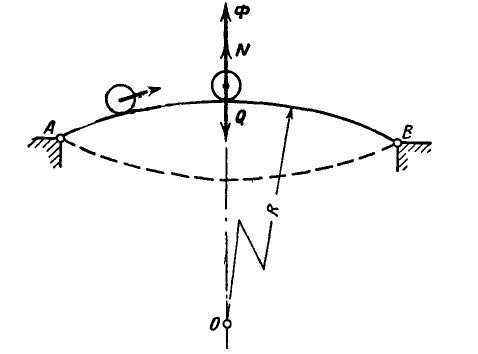
Рис. 303.
При какой скорости  автомобиля возможно его отделение от проезжей части моста?
автомобиля возможно его отделение от проезжей части моста?
Решение. Принимая автомобиль за материальную точку, замечаем, что для двух указанных случаев наибольшее давление автомобиля на мост будет тогда, когда он находится соответственно в наивысшей и наинизшей точках проезжей части, так как в этом случав все силы, приложенные к автомобилю, направлены по одной прямой.
Для нахождения давления автомобиля на мост в первом случае применяем начало д’Аламбера, для чего к силам, действующим на автомобиль, а именно к его весу Q и нормальной реакции моста N, присоединяем силу инерции Ф, направленную в сторону, обратную ускорению автомобиля  и равную
и равную  . Так как теперь мы имеем уже дело с задачей статики, то составляем уравнение равновесия сил Q, N и Ф в виде равенства нулю суммы их проекций на вертикальное направление:
. Так как теперь мы имеем уже дело с задачей статики, то составляем уравнение равновесия сил Q, N и Ф в виде равенства нулю суммы их проекций на вертикальное направление:

откуда

С такой же силой автомобиль будет оказывать давление на мост. Если выпуклость моста направлена книзу, то при решении задачи по началу д’Аламбера надо силу инерции Ф в этом случае направить уже вниз, так как ускорение автомобиля направлено вверх.
Обозначив для рассматриваемого случая нормальную реакцию моста через  , найдем:
, найдем:

или

Сравнивая величины  и
и  замечаем, что во втором случае давление автомобиля на мост значительно больше, чем в первом.
замечаем, что во втором случае давление автомобиля на мост значительно больше, чем в первом.
Полагая в первом уравнении N=0, найдем наибольшую скорость  , при которой возможно отделение автомобиля от проезжей части моста:
, при которой возможно отделение автомобиля от проезжей части моста:  , или
, или
откуда

Задача №2
Автомобиль движется по криволинейному участку дороги радиусом 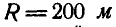 со скоростью
со скоростью . Каков должен быть поперечный уклон полотна дороги, характеризуемый
. Каков должен быть поперечный уклон полотна дороги, характеризуемый  (где
(где  — угол наклона полотна дороги к горизонту), для того чтобы давление движущегося автомобиля было направлено перпендикулярно к полотну дороги.
— угол наклона полотна дороги к горизонту), для того чтобы давление движущегося автомобиля было направлено перпендикулярно к полотну дороги.
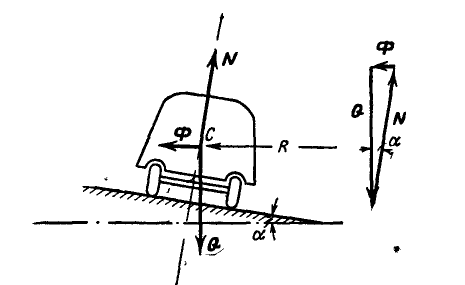
Рис. 304.
Решение. Рассматривая автомобиль как материальную точку, приложим к центру тяжести его С силу инерции Ф, равную  и направленную в сторону, противоположную нормальному ускорению точки С (рис. 304). Теперь три силы, приложенные к точке С — вес автомобиля Q, нормальная реакция дороги N и сила инерции Ф, согласно началу д’Аламбера, взаимно уравновешиваются, поэтому треугольник этих сил должен быть замкнут.
и направленную в сторону, противоположную нормальному ускорению точки С (рис. 304). Теперь три силы, приложенные к точке С — вес автомобиля Q, нормальная реакция дороги N и сила инерции Ф, согласно началу д’Аламбера, взаимно уравновешиваются, поэтому треугольник этих сил должен быть замкнут.
Построив этот треугольник, находим:

Задача №3
Вал АВ, соединенный жестко со стержнем CD, вращается, делая  . К концам стержня CD, наклоненного под углом
. К концам стержня CD, наклоненного под углом  45° к валу АВ, прикреплены два одинаковых груза весом Q = 50 кГ каждый (рис. 306). Найти реакции
45° к валу АВ, прикреплены два одинаковых груза весом Q = 50 кГ каждый (рис. 306). Найти реакции  и
и  подшипников А и В при
подшипников А и В при  .
.
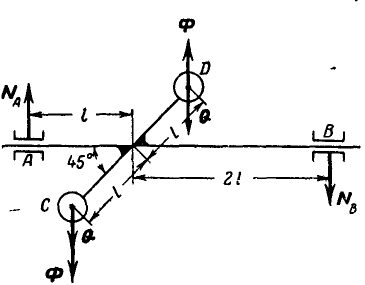
Рис. 306.
Решение. Для нахождения реакций подшипников и применим начало д’Аламбера, для чего к каждому из грузов С и D присоединим силу инерции Ф, равную 
Теперь вал АВ вместе с прикрепленным к нему стержнем CD и грузами находится в равновесии под действием сил тяжести грузов, реакций подшипников и фиктивных сил инерции.
Неизвестные реакции  и
и  определим теперь хотя бы из следующих двух уравнений равновесия:
определим теперь хотя бы из следующих двух уравнений равновесия:


откуда
Задача №4
Однородный стержень вращается вокруг вертикальной оси с постоянной угловой скоростью  (рис. 307, а). Размеры стержня указаны на чертеже. Найти установившийся угол
(рис. 307, а). Размеры стержня указаны на чертеже. Найти установившийся угол  , образованный между стержнем и его вертикальной осью вращения.
, образованный между стержнем и его вертикальной осью вращения.
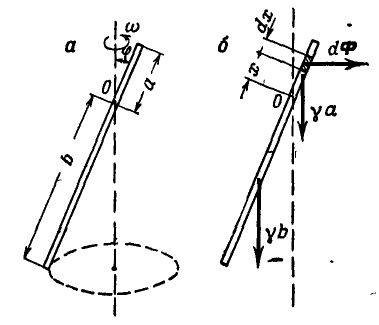
Рис. 307.
Решение. Разобьем весь стержень на ряд элементарных отрезков длиной dx каждый (рис. 307, б); тогда элементарная сила инерции, приходящаяся на выделенный элемент, будет:
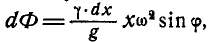
где  — вес единицы длины стержня.
— вес единицы длины стержня.
Момент элементарной силы инерции относительно точки О будет:

Так как после присоединения сил инерции стержень будет находиться в равновесии, то для. определения угла  составим уравнение равновесия в форме равенства нулю суммы моментов всех сил тяжести и сил инерции относительно точки О:
составим уравнение равновесия в форме равенства нулю суммы моментов всех сил тяжести и сил инерции относительно точки О:

откуда
Задача №5
На блок с неподвижной осью вращения, представляющий однородный диск радиусом R и весом  , намотан канат, к концу которого подвешен груз весом
, намотан канат, к концу которого подвешен груз весом (рис. 308). Найти ускорение
(рис. 308). Найти ускорение  груза и натяжение каната, если груз будет предоставлен самому себе. Массой каната пренебречь.
груза и натяжение каната, если груз будет предоставлен самому себе. Массой каната пренебречь.
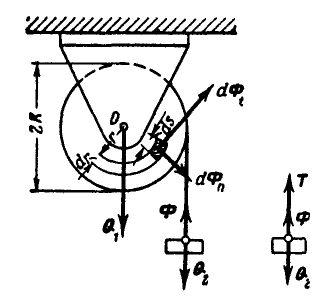
Рис. 308.
Решение. Для решения задачи воспользуемся началом д’Аламбера. Заданными силами, действующими на систему, состоящую из груза и блока, являются веса  и
и  . Так как ускорение груза направлено вниз, то его сила инерции направлена вверх и равна
. Так как ускорение груза направлено вниз, то его сила инерции направлена вверх и равна  .
.
Для вычисления сил инерции блока выделим элемент, ограниченный радиусами  и
и  и дугой ds; тогда сила инерции этого элемента может быть представлена в виде двух составляющих — нормальной
и дугой ds; тогда сила инерции этого элемента может быть представлена в виде двух составляющих — нормальной  и касательной
и касательной  причем:
причем:
где  — вес единицы площади блока.
— вес единицы площади блока.
Найдем теперь момент относительно оси вращения О всех сил инерции, приходящихся на элементарное кольцо, ограниченное окружностями радиусов и ; он равен:

Сюда вошел момент только касательных сил ннерцни; момент же нормальных сил инерции блока относительно точки О обращается в нуль.
Так как после присоединения сил инерции ко всем точкам системы последняя находится в равновесии, то для определения ускорения груза  приравниваем нулю сумму моментов всех заданных сил н сил инерции системы относительно оси вращения О:
приравниваем нулю сумму моментов всех заданных сил н сил инерции системы относительно оси вращения О:
Имея в виду равенства:

найдем окончательно:

Чтобы определить натяжение Т каната, воспользуемся следующим приемом: разорвем канат и взамен этого введем его реакцию, равную Т. Тогда, рассматривая отдельно равновесие груза  (рис. 308 справа), найдем:
(рис. 308 справа), найдем:

откуда

Задача №6
По установленной на рельсах платформе В, представляющей наклонную плоскость, перемещается под влиянием силы тяжести груз А, который можно считать за материальную точку (рис. 310). При движении груза по платформе, последняя будет перемещаться вправо. Пренебрегая силами трения, определить ускорение  платформы, а также давление
платформы, а также давление  груза на платформу, если масса груза равна т, а масса платформы М.
груза на платформу, если масса груза равна т, а масса платформы М.
Решение. Заданная нам система состоит из груза А, при; нятого нами за материальную точку, и платформы В, движущейся поступательно. Применим принцип д’Аламбера, для чего приложим ко всем точкам системы силы инерции.
Так как точка А совершает сложное движение и ее ускорение складывается из относительного  , направленного вниз параллельно наклонной плоскости, и переносного
, направленного вниз параллельно наклонной плоскости, и переносного  , равного ускорению платформы, то и сила инерции точки А состоит из двух компонентов:
, равного ускорению платформы, то и сила инерции точки А состоит из двух компонентов:  и
и  , направленных прямо противоположно ускорениям
, направленных прямо противоположно ускорениям  и
и  . Сила ннерции Ф платформы приложена в ее центре тяжести С и направлена в противоположную сторону ускорению . Теперь уже система находится в равновесии под действием заданных сил
. Сила ннерции Ф платформы приложена в ее центре тяжести С и направлена в противоположную сторону ускорению . Теперь уже система находится в равновесии под действием заданных сил  сил инерции
сил инерции  и реакций рельсов
и реакций рельсов  (сила давления
(сила давления  груза на платформу и реакция
груза на платформу и реакция  платформы взаимно уравновешиваются).
платформы взаимно уравновешиваются).
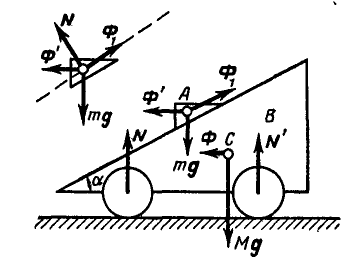
Рис. 310.
Напишем уравнение равновесия сил, приложенных к системе, в форме равенства нулю проекций нх на ось, совпадающую с направлением рельсов:

или

Это уравнение содержит два неизвестных  и
и  . Составим второе уравнение, исходя из рассмотрения равновесия точки А, для чего приравняем нулю сумму проекций всех сил, приложенных к точке А, на ось, параллельную наклонной плоскости (рис. 310, вверху):
. Составим второе уравнение, исходя из рассмотрения равновесия точки А, для чего приравняем нулю сумму проекций всех сил, приложенных к точке А, на ось, параллельную наклонной плоскости (рис. 310, вверху):

или

После сокращения на  получим:
получим:

Из уравнений (а) и (б) определяем 

Давление груза на платформу равно реакции плоскости  но противоположно по направлению. Для нахождения
но противоположно по направлению. Для нахождения  составим равенство нулю суммы проекций всех сил, приложенных к точке А, на направление оси, совпадающей с направлением .
составим равенство нулю суммы проекций всех сил, приложенных к точке А, на направление оси, совпадающей с направлением .

откуда

Переходя к изучению движения любой системы материальных точек, мы применим принцип виртуальных перемещений, включив, согласно началу д’Аламбера, в число приложеных сил — силы инерции.
Пусть движущаяся система состоит из  материальных точек и подчинена двусторонним и идеальным связям. Обозначим равнодействующую всех задаваемых сил, приложенных к
материальных точек и подчинена двусторонним и идеальным связям. Обозначим равнодействующую всех задаваемых сил, приложенных к  точке через
точке через  , а равнодействующую реакций связей — через
, а равнодействующую реакций связей — через  ; тогда, введя силу инерции
; тогда, введя силу инерции  , запишем уравнение, выражающее принцип возможных перемещений для точки:
, запишем уравнение, выражающее принцип возможных перемещений для точки:

а для всей системы:
или

В силу идеальности связей сумма работ их реакций на возможном перемещении системы обращается в нуль:

Отсюда прнходим к общему уравнению динамики, выраженному в векторной форме:
или в проекциях:


Это и есть общее уравнение динамики, или уравнение д’ Аламбера — Лагранжа, выражающее начало д’Аламбера в аналитической форме. Из него можно вывести уравнения равновесия и движения любых материальных систем.
Применение этого уравнения выясним на отдельных задачах.
Задача №7
Груз А весом  находится на горизонтальной гладкой плоскости и скреплен с нитью, перекинутой в точке С через малый блок, массой которого пренебрегаем (рис. 311).
находится на горизонтальной гладкой плоскости и скреплен с нитью, перекинутой в точке С через малый блок, массой которого пренебрегаем (рис. 311).
К концу нити подвешен свободно груз В весом  Найти ускорение
Найти ускорение  груза В и натяжение нити Т.
груза В и натяжение нити Т.
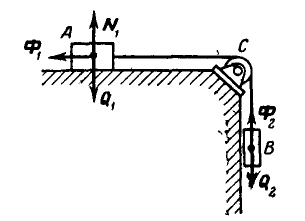
Рис. 311.
Решение. Пусть грузы А и В движутся с ускорением  Остановим систему и приложим к грузам А и В силы инерции
Остановим систему и приложим к грузам А и В силы инерции  и
и  . Дадим теперь системе возможное перемещение
. Дадим теперь системе возможное перемещение  переместив грузы, хотя бы слева направо, и составим уравнение работ:
переместив грузы, хотя бы слева направо, и составим уравнение работ:

или
откуда
Натяжение нити Т легко определится, если нить оборвать и рассмотреть равновесие одного из грузов, например В. Тогда, приравнивая нулю сумму проекций всех сил, приложенных к В на вертикальное направление, найдем:

или

Задача №8
К системе блоков (рис. 312) подвешены грузы:  и
и  . Пренебрегая массами блоков, определить ускорение
. Пренебрегая массами блоков, определить ускорение  груза
груза  и натяжение нити Т.
и натяжение нити Т.
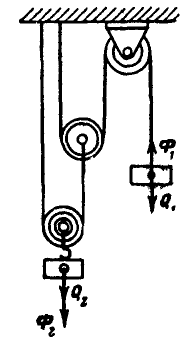
Рис. 312.
Решение. Приложим к грузам силы инерции  и
и  и дадим системе возможное перемещение. Если груз
и дадим системе возможное перемещение. Если груз  опустим вниз на величину
опустим вниз на величину  , то груз
, то груз  поднимется вверх на
поднимется вверх на  .
.
Отсюда следует, что ускорение второго груза будет также в четыре раза меньше ускорения первого груза.
Напишем теперь уравнение работ:

или

откуда

Натяжение нити T найдем из рассмотрения равновесия, например, первого груза:
или

Задача №9
Найти, при каком числе оборотов в минуту регулятора вокруг вертикальной оси угол  отклонения его плеч от вертикали будет равен 45° (рис. 313). Данные величины: длина плеч регулятора
отклонения его плеч от вертикали будет равен 45° (рис. 313). Данные величины: длина плеч регулятора  , расстояние от оси вращения до шарнира
, расстояние от оси вращения до шарнира  , вес каждого из шаров Q = 2 кГ, жесткость пружины с= 10 кГ/см, вес муфты
, вес каждого из шаров Q = 2 кГ, жесткость пружины с= 10 кГ/см, вес муфты  и при
и при  пружина не растянута и не сжата.
пружина не растянута и не сжата.
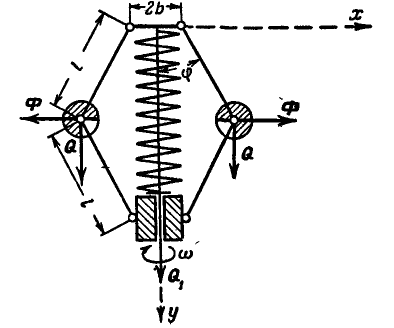
Рис. 313.
Решение. Пусть при  угол отклонения плеч регулятора от вертикали равен
угол отклонения плеч регулятора от вертикали равен  . При этом на систему, состоящую из двух шаров и муфты, действуют следующие заданные силы: веса шаров
. При этом на систему, состоящую из двух шаров и муфты, действуют следующие заданные силы: веса шаров  , вес муфты
, вес муфты  , а также сила упругости пружины Р:
, а также сила упругости пружины Р:

Все эти силы направлены по вертикали вниз.
Решим задачу, пользуясь началом д’Аламбера, для чего приложим к шарам равные по величине силы инерции:
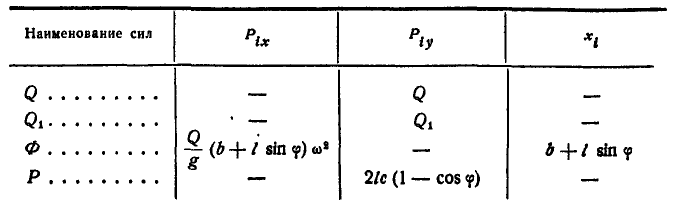
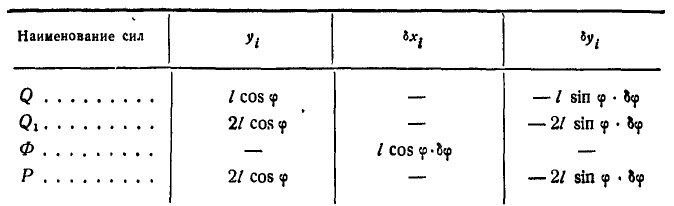
При составлении уравнения работ все вычисления сведем в таблицу 13. В таблицу 13 введены силы  и
и  , приложенные к шару, находящемуся справа от оси вращения.
, приложенные к шару, находящемуся справа от оси вращения.
Таблица 13
Отсюда

или

Но так как  , то
, то
- Динамические реакции при вращении твердого тела вокруг неподвижной оси
- Векторное исчисление
- Виды связей
- Параллельные силы
- Теорема об изменении кинетического момента
- Теорема об изменении кинетической энергии
- Потенциальное силовое поле
- Закон сохранения механической энергии
Содержание:
- Динамика механической системы
- Геометрия масс
- Механическая система. Центр масс механической системы
- Порядок решения задач на определение центра масс механической системы
- Примеры решения задач на тему: Определение центра масс механической системы
- Моменты инерции твердого тела относительно оси
- Моменты инерции некоторых однородных тел
- Примеры решения задач на тему: Моменты инерции твердого тела относительно оси
- Теорема о движении центра масс механической системы
- Закон сохранения движения центра масс
- Порядок решения задач на применение теоремы о движении центра масс
- Примеры решения задач на тему: Теорема о движении центра масс механической системы
- Теорема об изменении количества движения точки и механической системы
- Импульс силы
- Теорема об изменении количества движения точки и системы
- Закон сохранения количества движения системы
- Порядок решения задач на применение теоремы об изменении количества движения точки и механической системы
- Примеры решения задач на тему: Теорема об изменении количества движения точки и механической системы
- Теорема об изменении момента количества движения точки и механической системы
- Дифференциальное уравнение вращательного движения тела вокруг неподвижной оси
- Порядок решения задач на применение теоремы об изменении момента количества движения точки и механической системы
- Примеры решения задач на тему: Теорема об изменении момента количества движения точки и механической системы
- Теорема об изменении кинетической энергии механической системы
- Кинетическая энергия механической системы
- Определение кинетической энергии твердого тела в различных случаях его движения
- Порядок решения задач на использование теоремы об изменении кинетической энергии механической системы
- Примеры решения задач на тему: Теорема об изменении кинетической энергии механической системы
Динамика механической системы – изучает движение совокупности материальных точек и твердых тел, объединяемых общими законами.
На странице -> решение задач по теоретической механике собраны решения задач и заданий с решёнными примерами по всем темам теоретической механики.
Динамика механической системы
В предыдущей главе рассматривались задачи, связанные с движением материальной точки, которая находится под действием приложенных к ней сил. Однако часто приходится встречаться с такими случаями, когда движение одной точки невозможно рассматривать изолированно от движения других материальных точек. Это заставляет нас перейти к изучению движения совокупности материальных точек, или механических систем.
В механике под механической системой материальных точек или тел имеют в виду такую их совокупность, в которой положение или движение каждой точки (или тела) зависит от положения или движения всех других.
Совокупность тел, между которыми отсутствуют силы взаимодействия и движение которых никаким образом не связано друг с другом, механическую систему не создают. Механические системы бывают свободными и несвободными.
Система материальных точек, движение которых не ограничено никакими связями, а определяется только действующими на эти точки силами, называется системой свободных точек.
Система материальных точек, движение которых ограничивается наложенными на точки связями, называется системой несвободных точек.
Решение задач динамики механической системы базируется на теоремах динамики и некоторых принципах, которые будут рассмотрены в данной главе.
Геометрия масс
Геометрия точки масс, в просторечии известная как точки масс , является проблемой геометрии – метод решения , который применяет физический принцип центра масс к геометрическим задачам, включающим треугольники и пересекающиеся чевианы . Все задачи, которые могут быть решены с использованием геометрии материальных точек, также могут быть решены с использованием аналогичных треугольников, векторов или соотношений площадей, но многие студенты предпочитают использовать массовые точки.
Механическая система. Центр масс механической системы
В механике под механической системой подразумевают совокупность взаимодействующих между собой материальных точек или тел.
Частным случаем механической системы является абсолютно твердое тело.
Массой механической системы называется сумма масс всех точек, входящих в систему:

где  – масса материальной точки с номером
– масса материальной точки с номером  ,
,
 – число всех точек системы.
– число всех точек системы.
Центром масс (центром инерции) механической системы называется точка  (рис.5.1), радиус-вектор
(рис.5.1), радиус-вектор  которой определяется по формуле:
которой определяется по формуле:

где  – масса системы материальных точек;
– масса системы материальных точек;
 – радиус-вектор точки с массой .
– радиус-вектор точки с массой .
Декартовы координаты центра масс системы материальных точек определяются по зависимостям:

Здесь  – координаты
– координаты  -ой материальной точки.
-ой материальной точки.

Для твердого тела центр масс совпадает с центром тяжести.
Порядок решения задач на определение центра масс механической системы
Решение задач, в которых необходимо определить положение центра масс и уравнение его траектории, рекомендуется проводить в следующей последовательности:
Выбрать систему координат.
Записать координаты центров тяжести каждой из масс системы, выразив их в виде функций времени:

Определить координаты центра масс системы по формулам (5.1), при этом  будут функциями времени, то есть, полученные выражения будут параметрическими уравнениями движения центра масс.
будут функциями времени, то есть, полученные выражения будут параметрическими уравнениями движения центра масс.
Для нахождения уравнений траектории центра масс надо с последних выражений (пункт 3) исключить время.
Примеры решения задач на тему: Определение центра масс механической системы
Задача № 1
Определить положение центра масс центробежного регулятора, изображенного на рис.5.2, если вес каждого из шаров  и
и  равен
равен  , вес муфты
, вес муфты  равен
равен  . Пули и считать материальными точками. Массой стержней пренебречь.
. Пули и считать материальными точками. Массой стержней пренебречь.
Решение. Система координат, относительно которой необходимо определить положение центра масс, изображена на рис.5.2.
Для определения положения центра масс системы надо определить его координаты по формулам (5.1):

где 
 – координаты центра масс пуль , и муфты .
– координаты центра масс пуль , и муфты .
Следовательно,

Находим координаты центров масс:
пули : 
пули : 
муфты : 
Тогда:

поскольку


Ответ: 
Задача № 2
Найти уравнение движения центра масс шарнирного параллелограмма  а также уравнение траектории его центра масс при вращении кривошипа
а также уравнение траектории его центра масс при вращении кривошипа  с постоянной угловой скоростью
с постоянной угловой скоростью  . Звенья параллелограмма – однородные стержни (рис.5.3), и
. Звенья параллелограмма – однородные стержни (рис.5.3), и 

Решение. Начало системы координат свяжем с шарниром  кривошипа . Ось
кривошипа . Ось  направим справа по линии
направим справа по линии  а ось
а ось  – перпендикулярно линии
– перпендикулярно линии  .
.
Поскольку звенья 1,2,3 параллелограмма однородны, то центры масс их лежат посередине звеньев (точки  ).
).
Из размеров звеньев вытекает: 
Определим координаты центров масс звеньев механизма как функции угла поворота  (рис.5.3):
(рис.5.3):

Для определения координат центра масс шарнирного параллелограмма  воспользуемся зависимостью (5.1):
воспользуемся зависимостью (5.1):


Для определения уравнения траектории центра масс (точки ) исключим параметр  из уравнений (1) и (2). С этой целью выполним следующие преобразования:
из уравнений (1) и (2). С этой целью выполним следующие преобразования:

Сложим, соответственно, левые и правые части этих уравнений:

Таким образом, траекторией центра масс шарнирного параллелограмма является окружность:
с радиусом, равным  , с центром в точке
, с центром в точке  с координатами
с координатами 
Ответ: 

Задача № 3
Определить траекторию центра масс механизма эллипсографа (рис.5.4), который состоит из муфт и весом  каждая, кривошипа
каждая, кривошипа  весом
весом  и линейки
и линейки  весом
весом  , если
, если 

Считать, что линейка и кривошип есть однородные стержни, а муфты – точечные массы.
Решение. Механизм состоит из 4 подвижных звеньев. Для удобства решения задачи пронумеруем звенья соответственно рис.5.4.
Система координат, относительно которой будет определяться траектория центра масс механизма показана на рисунке.
Сначала определим координаты центров масс всех звеньев механизма:

Для определения координат центра масс механизма эллипсографа воспользуемся формулой (5.1):

Следовательно, координаты центра масс эллипсографа имеют значения:

Для нахождения уравнения траектории центра масс в явном виде необходимо из этих уравнений исключить угол  . Решив оба уравнения относительно
. Решив оба уравнения относительно  и
и  , возводя их затем к квадрату и сложив, получим:
, возводя их затем к квадрату и сложив, получим:

Траекторией центра масс является окружность с центром в точке и радиусом  , который равен:
, который равен:

Ответ: 
Задача № 4
Определить зависимость от угла поворота кривошипа координат центра масс кривошипно-ползунного механизма, что изображено на рис.5.5. Длина кривошипа  , его вес
, его вес  , длина шатуна
, длина шатуна  , его вес
, его вес  , вес ползуна
, вес ползуна  .
.
Решение. Выберем систему координат  как показано на рис.5.5. Рассмотрим механизм в произвольном положении, которое определяется углом (для любого положения
как показано на рис.5.5. Рассмотрим механизм в произвольном положении, которое определяется углом (для любого положения  , так как
, так как  ).
).
Применяя формулу (5.1), получим:

где  – координаты центров тяжести тел, составляющих систему,
– координаты центров тяжести тел, составляющих систему,
– масса всей системы.
С рис.5.5 находим:

Масса всей системы в данном случае равна:

Подставляя в выражения (1) и (2) значения координат центров масс тел механической системы и величину массы системы , получим:

Ответ: 
Задача № 5
Определить уравнение траектории центра масс кулисного механизма (рис.5.6), если вес кривошипа равен , вес ползуна равен , а вес кулисы и штанги  равен
равен  . Кривошип, который вращается с постоянной угловой скоростью , считать тонким однородным стержнем, а ползун – точечной массой. Центр тяжести кулисы и штанги расположен в точке
. Кривошип, который вращается с постоянной угловой скоростью , считать тонким однородным стержнем, а ползун – точечной массой. Центр тяжести кулисы и штанги расположен в точке  , причем
, причем  . При расчетах принять:
. При расчетах принять:

Будем считать, что в начальный момент ползун занимал крайнее правое положение.
Решение. Выберем оси декартовых координат, как показано на рисунке, где положение кулисного механизма соответствует моменту времени . Так как кривошип вращается равномерно, то его угол поворота равен 
Для определения положения центра масс системы необходимо найти его координаты  и
и  по формуле (5.1).
по формуле (5.1).
Поскольку механическая система состоит из трех тел – кривошипа , ползуна и кулисы со штангой , то:

Индекс 1 соответствует кривошипу, индекс 2 – ползуну , индекс 3 – кулисе со штангой.

Из рисунка видно:

Подставим значения  в формулы для определения и .
в формулы для определения и .

Исключим время в уравнениях, которые определяют движение центра масс.
Для этого решим оба уравнения относительно  и
и  :
:

Возведем эти уравнения к квадрату и добавим:

Таким образом, траекторией центра масс кулисного механизма является эллипс с полуосями  и
и 
Центр эллипса лежит на оси  и отдален от начала координат вправо на расстояние
и отдален от начала координат вправо на расстояние 
Ответ: 
Моменты инерции твердого тела относительно оси
Влияние собственных свойств тела на вращательное движение значительно сложнее, чем в поступательном движении.
Также как масса тела является мерой инертности тела при его поступательном движении, так и момент инерции тела относительно данной оси является мерой инертности тела при его вращательном движении.
Как мера инертности тела момент инерции входит во все формулы вращательного движения. Не зная момента инерции тела, не умея его определить, нельзя решать задачи, которые связаны с вращательным или сложным движением тела, частью которого является вращательное движение.
Момент инерции тела (системы) относительно оси, например  , обозначим
, обозначим  (индекс указывает на ось, относительно которой определяется момент инерции).
(индекс указывает на ось, относительно которой определяется момент инерции).
Моментом инерции тела относительно оси, например  , называется скалярная величина, равная сумме произведений масс точек тела на квадраты их расстояний к оси:
, называется скалярная величина, равная сумме произведений масс точек тела на квадраты их расстояний к оси:

Если тело сплошное, то под необходимо понимать массу элементарной частицы тела  , тогда момент инерции будет выражаться интегралом:
, тогда момент инерции будет выражаться интегралом:

где  – расстояние доли от оси.
– расстояние доли от оси.
Этот интеграл берется по всей массе тела. Очевидно, что величина момента инерции зависит от размеров и формы тела , а также от закона распределения массы в теле.
Момент инерции измеряется в системе СИ – в  , в технической системе – в
, в технической системе – в  .
.
Для тел правильной геометрической формы определение моментов инерции делается с помощью интегрального вычисления. Если тело имеет неправильную форму, то момент инерции его определяется либо приблизительно, путем разбития тела на несколько тел, которые имеют правильную геометрическую форму, либо экспериментально.
Для однородного тела, при плотности  :
:

где интеграл берется по всему объему тела.
Для однородной материальной поверхности:

где  – масса единицы плоскости поверхности и интеграл берется по всей плоскости поверхности.
– масса единицы плоскости поверхности и интеграл берется по всей плоскости поверхности.
Для однородной материальной линии:

где – масса единицы длины линии. Интеграл берется по длине  .
.
Для одной материальной точки, которая находится на расстоянии от оси, момент инерции равен:

Иногда при определении момента инерции тела пользуются понятием радиуса инерции. Радиусом инерции тела относительно оси, например  , называется линейная величина
, называется линейная величина  , определяемая равенством:
, определяемая равенством:

где – масса тела.
Следовательно, радиус инерции определяет расстояние от оси к точке, в которой необходимо сосредоточить всю массу тела, чтобы момент инерции точки относительно этой оси равнялся моменту инерции тела.
Момент инерции системы относительно начала координат равен

Моменты инерции относительно координатных осей (осевые моменты) выражаются зависимостями:

Существует простая зависимость между моментами инерции тела относительно параллельных осей, одна из которых проходит через его центр масс (теорема Гюйгенса-Штейнера).
Момент инерции тела относительно любой оси равен моменту инерции тела относительно оси, проходящей через центр масс тела параллельно данной оси, плюс произведение массы тела на квадрат расстояния между осями:

где  – момент инерции тела относительно оси, которая проходит через центр масс и параллельна данной;
– момент инерции тела относительно оси, которая проходит через центр масс и параллельна данной;
 – момент инерции тела относительно данной оси;
– момент инерции тела относительно данной оси;
 – расстояние между осями.
– расстояние между осями.
Из выражения (5.4) вытекает, что наименьшим момент инерции тела будет относительно той оси, которая проходит через центр его масс.
Моменты инерции некоторых однородных тел
| Форма тела. | Схема тела. | Момент инерции. |
| Тонкий прямолинейный стержень |  |
 |
| -„- |  |
 |
| Круглая пластинка малой толщины |  |
 |
| Кольцо (материальная окружность) |  |
 |
| Круглый цилиндр |  |
 |
| Прямоугольный параллелепипед |  |
 |
| Полый шар со стенками малой толщины |  |
 |
| Шар |  |
 |
Примеры решения задач на тему: Моменты инерции твердого тела относительно оси
Задача №1
Маятник, изображенный на рис. 5.7, состоит из тонкого однородного стержня длиной  и массой
и массой  и круглого однородного диска с радиусом
и круглого однородного диска с радиусом  и массой
и массой 

Определить момент инерции  относительно оси его вращения (ось направлена перпендикулярно плоскости рисунка).
относительно оси его вращения (ось направлена перпендикулярно плоскости рисунка).
Решение. Маятник состоит из двух тел: стержня и диска, поэтому

где  и
и  моменты инерции относительно оси стержня и диска, соответственно.
моменты инерции относительно оси стержня и диска, соответственно.
Момент инерции стержня равен (см. 5.5):

Момент инерции диска найдем по формуле (5.4):

где  – момент инерции диска относительно оси, которая проходит параллельно оси через его центр масс, точку , а расстояние от центра масс к оси –
– момент инерции диска относительно оси, которая проходит параллельно оси через его центр масс, точку , а расстояние от центра масс к оси – 
Итак

Пользуясь выражениями для моментов инерции стержня (2) и диска (3), найдем момент инерции маятника относительно оси :

После подстановки в выражение (4) числовых данных, получим:

Ответ: 
Задача №2.
Определить момент инерции  стального вала радиуса
стального вала радиуса  см и массой
см и массой  относительно его образующей. Вал считать однородным сплошным цилиндром (рис.5.8).
относительно его образующей. Вал считать однородным сплошным цилиндром (рис.5.8).

Решение. Для определения момента инерции стального вала относительно оси  , надо воспользоваться формой Гюйгенса-Штейнера
, надо воспользоваться формой Гюйгенса-Штейнера

где  – момент инерции относительно оси
– момент инерции относительно оси  , которая проходит через центр масс тела.,
, которая проходит через центр масс тела.,
 – масса вала,
– масса вала,
 – расстояние между осями, равное радиусу вала.
– расстояние между осями, равное радиусу вала.

Тогда

Ответ: 
Задача № 3
Определить осевые моменты инерции  и
и  изображенной на рис.5.9 однородной прямоугольной пластинки весом .
изображенной на рис.5.9 однородной прямоугольной пластинки весом .

Решение. Определим момент инерции пластинки относительно оси . Для этого выделим на расстоянии  полоску шириной
полоску шириной  .
.
Момент инерции этой тонкой полоски относительно оси равен:

где  – масса полоски.
– масса полоски.
Масса полоски равна:

где  – площадь полоски;
– площадь полоски;
 – масса единицы площади поверхности пластинки.
– масса единицы площади поверхности пластинки.
Тогда:

а момент инерции всей пластинки будет равен сумме моментов инерции всех полосок, на которые можно разбить пластинку:

При предельном переходе, то есть, когда 

Итак,

Вычислим массу пластинки:

Таким образом

Момент инерции пластинки относительно оси  находим аналогичным путем и получим:
находим аналогичным путем и получим:

Ответ: 
Задача №4
Определить момент инерции относительно оси  однородного прямоугольного параллелепипеда весом (рис.5.10).
однородного прямоугольного параллелепипеда весом (рис.5.10).
Решение. Выделим элементарный параллелепипед со сторонами основания  и высотой
и высотой  Расстояние элементарного параллелепипеда от осей и равно
Расстояние элементарного параллелепипеда от осей и равно  и
и  соответственно.
соответственно.
Момент инерции элементарного параллелепипеда относительно оси равен:

где:  – масса элементарного параллелепипеда, равна:
– масса элементарного параллелепипеда, равна:


Тогда, 
а момент инерции всего параллелепипеда

При предельном переходе, то есть при  то сумма, которая стоит справа, переходит в двойной интеграл:
то сумма, которая стоит справа, переходит в двойной интеграл:

Вычислим двойной интеграл:

Масса параллелепипеда:

Следовательно,

Ответ: 
Задача №5
Определить момент инерции относительно оси тонкой однородной параболической пластинки (рис.5.11) массой . Предельная прямая пластинки параллельна оси и удалена от нее на расстояние  . Уравнение параболы, которая ограничивает пластинку, имеет вид
. Уравнение параболы, которая ограничивает пластинку, имеет вид 

Решение. Проведем на пластинке (рис.5.11) две прямые, параллельные оси и удаленные от нее на расстоянии и 
Вычислим момент инерции относительно оси элементарной полоски, которая ограничена этими прямыми и параболическим контуром пластинки (заштрихована на рисунке):

где – элементарная масса плоскости, которая равна:

Здесь  – плотность пластинки,
– плотность пластинки,
 – площадь пластинки.
– площадь пластинки.
Итак,

Из уравнения  вытекает
вытекает 
Таким образом

Момент инерции пластинки относительно оси равен:

Масса пластинки 
где площадь пластинки 
Тогда

Следовательно,

Ответ: 
Задача №6
Определить для тонкого равнобедренного треугольника  , основание которого равно , высота и масса (рис.5.12), его моменты инерции относительно основания и относительно высоты.
, основание которого равно , высота и масса (рис.5.12), его моменты инерции относительно основания и относительно высоты.

Решение. С серединой основания равнобедренного треугольника свяжем начало системы координат  ; ось проведем по основанию
; ось проведем по основанию  , а ось – перпендикулярно основанию.
, а ось – перпендикулярно основанию.
Для определения момента инерции треугольника относительно основания (относительно оси ) выделим на расстоянии  элементарную полоску шириной
элементарную полоску шириной  .
.
Момент инерции этой полоски относительно оси составит:

где  , масса полоски длиной
, масса полоски длиной  , равна:
, равна:

Тогда момент инерции элементарной полоски относительно основания будет равен:

Найдем зависимость между координатой и длиной полоски . Из сходства треугольников и  (рис.5.12) следует:
(рис.5.12) следует:
 или
или 
откуда

Подставив (2) у (1’), получим:

а момент инерции треугольника относительно основания определится как

или

В интеграле (3) границы координаты меняются от  к .
к .
Высчитаем интеграл (3):

Выразим момент инерции  через массу треугольника :
через массу треугольника :

Преобразуем выражение (4):

или

Перейдем к определению момента инерции треугольника относительно его высоты .
Поскольку у треугольника высота является осью симметрии, то достаточно определить момент инерции относительно этой оси для прямоугольного треугольника  , тогда
, тогда

где  – момент инерции треугольника ;
– момент инерции треугольника ;
 – момент инерции треугольника .
– момент инерции треугольника .
Расчетная схема для определения момента инерции приведена на рис.5.13.

Выделим элементарную полоску на расстоянии  от оси , ширина полоски –
от оси , ширина полоски –  , длина – .
, длина – .
Определим момент инерции этой полоски относительно оси :

где  – масса элементарной полоски.
– масса элементарной полоски.
Определим зависимость между длиной полоски и координатой . Из сходства треугольников  и получается:
и получается:
 или
или 
откуда

Подставив (6) у (5), получим:

Момент инерции треугольника относительно оси (относительно высоты  ), равен:
), равен:

или

Определим интеграл (7):

Окончательно,

Тогда, момент инерции треугольника относительно высоты будет равен:

Ответ: 
Задачи, которые рекомендуются для самостоятельной работы: 34.9, 34.12, 34.16 [2].
Теорема о движении центра масс механической системы
Силы, действующие на механическую систему, можно условно поделить на внешние и внутренние.
Силы, которые действуют на точки данной механической системы со стороны точек или тел, не входящих в эту систему, называются внешними.
Силы, действующие на точки механической системы со стороны точек данной системы, называются внутренними.
Внешние силы обозначаются верхним индексом  , внутренние –
, внутренние –  :
:  -внешняя сила,
-внешняя сила,  – внутренняя сила.
– внутренняя сила.
Внутренние силы обладают следующими свойствами:
а) геометрическая сумма (главный вектор) внутренних сил равна нулю:

б) геометрическая сумма моментов (главный момент) всех внутренних сил относительно любого центра или оси равна нулю:


Теорема о движении центра масс механической системы формулируется следующим образом:
Произведение массы системы на ускорение ее центра масс равно геометрической сумме всех внешних сил, действующих на систему.

где – масса системы;
 – ускорение центра масс;
– ускорение центра масс;
 – сумма внешних сил, которые действуют на систему.
– сумма внешних сил, которые действуют на систему.
Из сравнения приведенной выше формулы со вторым законом динамики, который, как известно, записан для материальной точки:

можно сделать следующий вывод:
Центр масс механической системы движется как материальная точка, в которой сосредоточено массу всей системы и к которой приложены те же внешние силы, действующие на систему.
Теорема о движении центра масс системы, если ее записать в проекциях на оси декартовой системы координат, имеет вид:

где  – координаты центра масс механической системы.
– координаты центра масс механической системы.
Из приведенных уравнений следует, что внутренние силы непосредственно не влияют на движение центра масс. Теорема позволяет исключить из рассмотрения все ранее неизвестные внутренние силы.
Задачи динамики поступательного движения твердого тела решаются с помощью теоремы о движении центра масс системы материальных точек.
Действительно, применив эту теорему, мы определим уравнение траектории, скорость и ускорение центра тяжести твердого тела. При поступательном движении твердого тела траектории всех его точек одинаковы, одинаковы и их скорости и ускорения.
Закон сохранения движения центра масс
Из теоремы о движении центра масс вытекает несколько следствий:
а) если геометрическая сумма всех внешних сил, действующих на систему, равна нулю, то центр масс механической системы находится в покое или движется равномерно и прямолинейно.
Пусть  , тогда
, тогда
 или
или  , поэтому
, поэтому 
Если изначально центр масс был в покое, то он и останется в покое. Если же начальная скорость не равна нулю, то центр масс движется прямолинейно и равномерно с этой скоростью;
б) если геометрическая сумма внешних сил, действующих на систему, не равна нулю, но сумма их проекций на какую-нибудь ось (например, ось ) равна нулю, то центр масс системы вдоль этой оси или не движется, или движется равномерно.
Если  , то:
, то:
 или
или  , поэтому
, поэтому 
Если при этом равна нулю начальная скорость, то есть  , то
, то  , то есть
, то есть 
Таким образом видим, что в этом случае координата центра масс механической системы во время ее движения остается неизменной.
При  проекция центра масс на ось движется равномерно.
проекция центра масс на ось движется равномерно.
Все эти результаты выражают законы сохранения движения центра масс системы.
Порядок решения задач на применение теоремы о движении центра масс
Рекомендуется такая последовательность решения задач:
Изобразить на рисунке все внешние силы, действующие на систему;
Выбрать систему координат;
Записать теорему о движении центра масс в векторной форме;
Спроектировать это векторное уравнение на оси координат;
Высчитать суммы проекций всех внешних сил на оси координат и подставить их в проекции уравнения движения;
Решить полученные уравнения и определить искомые величины.
Примеры решения задач на тему: Теорема о движении центра масс механической системы
Задача № 1
Определить главный вектор внешних сил, действующих на колесо весом , которое скатывается без скольжения с наклонной плоскости, если его центр масс движется по закону  (рис.6.1).
(рис.6.1).

Решение. Покажем внешние силы, которые действуют на колесо: силу тяжести  и реакцию поверхности
и реакцию поверхности  , которые проходят через центр масс колеса .
, которые проходят через центр масс колеса .
Запишем теорему о движении центра масс в векторной форме:

Выбираем систему координат  и спроектируем уравнение (1) на оси и :
и спроектируем уравнение (1) на оси и :

Поскольку  . то
. то  и
и  . То есть, главный вектор внешних сил является параллельным оси :
. То есть, главный вектор внешних сил является параллельным оси :

Найдем проекцию ускорения центра масс на ось :

Итак,

Ответ: 
Задача №2
Колесо весом и радиусом катится со скольжением по прямолинейной горизонтальной рейке в результате действия постоянной силы  , которая приложена к его центру тяжести (рис.6.2).
, которая приложена к его центру тяжести (рис.6.2).

Определить скорость центра масс колеса, если в начальный момент оно находилось в покое. Коэффициент трения скольжения равен  .
.
Решение. На колесо действуют внешние силы: – сила тяжести колеса, – движущая сила,  – нормальная реакция рейки,
– нормальная реакция рейки,  – сила трения скольжения, которая направлена вдоль рельса в сторону, противоположную силе .
– сила трения скольжения, которая направлена вдоль рельса в сторону, противоположную силе .
Запишем теорему о движении центра масс колеса в векторной форме:

где – ускорение центра масс колеса.
Спроектируем это уравнение на оси координат  :
:

Во время движения колеса  Итак
Итак  из второго уравнения (1) получаем:
из второго уравнения (1) получаем:

Поскольку при качении колеса со скольжением сила трения достигает своего максимального значения, то

Подставим (3) в первое из уравнений (1) и получим:

Поскольку

то

Согласно начальным условиям при  с тех пор находим, что произвольная постоянная
с тех пор находим, что произвольная постоянная 
Итак, закон изменения скорости центра масс колеса имеет вид:

Ответ: 
Задача №3
На однородную призму , которая лежит на горизонтальной плоскости, положили однородную призму (рис.6.3,а), поперечные сечения призм – прямоугольные треугольники, вес призмы втрое больше веса призмы . Необходимые размеры показаны на рисунке.
Определить длину , на которую передвинется призма , когда призма , спускаясь по поверхности призмы , дойдет к горизонтальной плоскости. Предположить, что все поверхности, которые соприкасаются, идеально гладкие.
Решение. Рассмотрим движение механической системы, состоящей из 2-х призм и . Призма , спускаясь по призме справа, как будто выжимает ее, отодвигает налево (рис.6.3, б).
Для решения этой задачи применим теорему о движении центра масс.
На систему действуют внешние силы: тяжести  призмы , тяжести
призмы , тяжести  призмы , нормальная реакция плоскости (рис.6.3). Внешняя сила трения призм по идеально гладкой поверхности равна нулю.
призмы , нормальная реакция плоскости (рис.6.3). Внешняя сила трения призм по идеально гладкой поверхности равна нулю.
Таким образом, все внешние силы системы вертикальны. Внутренние силы системы (давление призмы на призму , реакция на это давление, а также силы трения между призмами и ), нас не интересуют.
Введем систему координат  , ось направим по горизонтали справа и запишем теорему о движении центра масс системы в проекции на ось :
, ось направим по горизонтали справа и запишем теорему о движении центра масс системы в проекции на ось :

Поскольку внешние силы перпендикулярны оси , то

Тогда

где  – постоянная интегрирования.
– постоянная интегрирования.
В начальный момент времени система находилась в состоянии покоя, то есть скорость центра масс  Итак,
Итак, 
Из этого следует, что  , то есть, абсцисса центра масс, независимо от перемещения призм, остается постоянной.
, то есть, абсцисса центра масс, независимо от перемещения призм, остается постоянной.

Запишем выражение для определения координаты центра масс в начале движения:

где  – абсцисса центра масс призмы ,
– абсцисса центра масс призмы ,
 – абсцисса центра масс призмы .
– абсцисса центра масс призмы .
Выражение для определения координаты центра масс системы, когда призма опускается по боковой грани призмы к горизонтальной плоскости:

где  – новое значение абсциссы центра масс призмы ,
– новое значение абсциссы центра масс призмы ,
 – новое значение абсциссы центра масс призмы .
– новое значение абсциссы центра масс призмы .
Поскольку  , то
, то

или

Перепишем это уравнение следующим образом:

Найдем перемещение центров масс призм и :

Присутствие слагаемого ( ) в последнем уравнении учитывает перемещение призмы вместе с призмой слева на величину .
) в последнем уравнении учитывает перемещение призмы вместе с призмой слева на величину .
Подставим значение перемещений в уравнение (1):
 .
.
Решим это уравнение относительно , имея в виду, что  :
:

Ответ: 
Задача №4
Три груза (рис.6.4), весом  соединенные невесомой нитью, которая не растягивается, и которая перекинута через неподвижные блоки и
соединенные невесомой нитью, которая не растягивается, и которая перекинута через неподвижные блоки и  . Во время опускания груза 1 вниз груз 2 перемещается по верхнему основанию четырехугольной усеченной пирамиды
. Во время опускания груза 1 вниз груз 2 перемещается по верхнему основанию четырехугольной усеченной пирамиды  весом
весом  справа, а груз 3 поднимается по боковой грани вверх. Пренебрегая трением между срезанной пирамидой и полом, определить перемещение
справа, а груз 3 поднимается по боковой грани вверх. Пренебрегая трением между срезанной пирамидой и полом, определить перемещение  усеченной пирамиды относительно пола, если груз опустится на
усеченной пирамиды относительно пола, если груз опустится на 
Решение. Изобразим все внешние силы, которые приложены к материальной системе, состоящей из пирамиды и трех грузов (рис.6.4). Внешними силами являются: – сила тяжести пирамиды;  – силы тяжести грузов; – нормальная реакций
– силы тяжести грузов; – нормальная реакций

горизонтальной плоскости. Направим ось по горизонтали справа и запишем теорему о движении центра масс системы материальных точек в проекции на эту ось:

Поскольку все внешние силы перпендикулярны оси , то 
Следовательно, 
тогда

В начальный момент времени система была в состоянии покоя, то есть  , поэтому
, поэтому 
Поскольку

то

Таким образом, абсцисса центра масс системы не зависит от перемещений грузов, входящих в систему, и остается неизменной относительно неподвижной системы координат  .
.
Запишем выражение для определения для начального момента времени, когда грузы находились в состоянии покоя:

где  – абсциссы центров масс пирамиды и грузов 1,2 и 3.
– абсциссы центров масс пирамиды и грузов 1,2 и 3.
Если груз 1 опустится на величину при неподвижной пирамиде, то координата  при этом не изменится. Тогда груз 2 переместится вправо на величину и координата его центра масс будет равна
при этом не изменится. Тогда груз 2 переместится вправо на величину и координата его центра масс будет равна  . Груз 3 тоже подвинется по наклонной поверхности
. Груз 3 тоже подвинется по наклонной поверхности  на величину , при этом по направлению оси его положение изменится на величину
на величину , при этом по направлению оси его положение изменится на величину  и координата центра масс будет
и координата центра масс будет  . То есть, относительно пирамиды центр масс системы изменит свое положение, но не изменит его относительно неподвижной системы координат, поскольку должен выполняться закон сохранения движения центра масс. И тогда пирамида должна переместиться налево на некоторую величину
. То есть, относительно пирамиды центр масс системы изменит свое положение, но не изменит его относительно неподвижной системы координат, поскольку должен выполняться закон сохранения движения центра масс. И тогда пирамида должна переместиться налево на некоторую величину  .
.
Грузы 1,2 и 3 вместе с пирамидой также переместятся влево на расстояние  , и новые координаты всех центров масс будут равны:
, и новые координаты всех центров масс будут равны:

Запишем выражение для определения положения абсциссы центра масс для нового положения системы:

Поскольку  то
то

После приведения подобных получим:

или

Окончательно

После подстановки числовых величин, получим:

Ответ: 
Задача № 5
Электрический двигатель весом с горизонтальным валом без всяких креплений установлен на гладком горизонтальном фундаменте.
На валу электродвигателя (рис.6.5) под прямым углом закреплен одним концом однородный стержень  длиной
длиной  и весом , на второй конец стержня насажен точечный груз весом
и весом , на второй конец стержня насажен точечный груз весом  ; угловая скорость вала равна .
; угловая скорость вала равна .
Определить:
Закон горизонтального движения электродвигателя;
Угловую скорость вала электродвигателя, при которой электродвигатель будет «подскакивать» над фундаментом;
Наибольшее горизонтальное усилие  , которое действует на болты, если ими закреплен корпус электродвигателя на фундаменте.
, которое действует на болты, если ими закреплен корпус электродвигателя на фундаменте.
Решение. Будем рассматривать электромотор, стержень и груз как одну механическую систему. Внешними силами, которые действуют на эту систему, являются: сила тяжести электродвигателя  , сила тяжести стержня
, сила тяжести стержня  , сила тяжести груза
, сила тяжести груза  , а также реакции фундамента
, а также реакции фундамента  и
и  . Все эти силы вертикальны.
. Все эти силы вертикальны.

Начало неподвижной системы координат возьмем в точке , соответствующей положению центра вала электродвигателя, когда стержень направлен вертикально вверх (рис.6.5, а).
Поскольку проекция на ось главного вектора действующих на систему внешних сил равна нулю, то дифференциальное уравнение движения центра масс системы вдоль оси имеет вид:

где – масса системы.
В нашем случае  или
или

Тогда дифференциальное уравнение движения центра масс (1) приводится к виду:

откуда 
Предполагая, что в начальный момент скорость центра масс системы равна нулю, то есть, при пуске электродвигателя он был неподвижным, получим 
Следовательно,  , то есть, центр масс системы не перемещается вдоль оси .
, то есть, центр масс системы не перемещается вдоль оси .
Поскольку в начальный момент времени центр масс системы находится на оси (то есть,  ), то и в любой момент времени
), то и в любой момент времени 
При вращении стержня координаты центров масс электрического двигателя, стержня и груза будут варьироваться.
Предположим, что в некоторый момент времени координата центра масс мотора станет равной , тогда координаты центров масс стержня и груза будут равны  и
и  (рис.6.5,b).
(рис.6.5,b).
Поскольку все время  , то
, то

где  На рисунке 6.5,b показан момент, когда координата отрицательна.
На рисунке 6.5,b показан момент, когда координата отрицательна.
Тогда

откуда

и, следовательно:

Таким образом, центр электродвигателя совершает гармонические колебания вдоль оси с амплитудой, равной:

и периодом

Определим угловую скорость вала, при которой электродвигатель будет «подскакивать» над фундаментом.
Для этого составим дифференциальное уравнение движения центра масс системы вдоль оси :

или

где  – суммарная реакция фундамента.
– суммарная реакция фундамента.
Значение найдем из выражения для координаты центра масс:

поскольку

Последнее уравнение перепишем в виде:

Возьмем из обеих частей равенства вторую производную по времени

Из уравнений (2) и (3) вытекает, что

итак,

Минимальное значение реакции фундамента будет при  :
:

Если  , то это значит, что электромотор не прижимается к фундаменту. Итак, искомое значение угловой скорости, при которой электродвигатель начинает “подскакивать” над фундаментом, найдем из условия
, то это значит, что электромотор не прижимается к фундаменту. Итак, искомое значение угловой скорости, при которой электродвигатель начинает “подскакивать” над фундаментом, найдем из условия

откуда

В завершение определим наибольшее горизонтальное усилие  , которое действует на болты, если ими будет закреплен корпус электродвигателя на фундаменте.
, которое действует на болты, если ими будет закреплен корпус электродвигателя на фундаменте.
На рис.6.5 штрих-пунктирными линиями показаны оси болтов и горизонтальные реакции болтов  и
и  .
.
В этом случае дифференциальное уравнение движения центра масс системы вдоль оси будет:

Значение найдем по формуле:

или

Тогда

При этом уравнение (4) принимает вид:

Из последнего уравнения выходит:

Таким образом, максимальное горизонтальное усилие, действующее на болты, будет при  :
:

Ответ:

Задачи, которые рекомендуются для самостоятельной работы: 35.1; 35.6; 35.10; 35.20 [2].
Теорема об изменении количества движения точки и механической системы
Теорема об изменении количества движения (импульса) системы — одна из общих теорем динамики, является следствием законов Ньютона. Связывает количество движения с импульсом внешних сил, действующих на тела, составляющие систему.
Импульс силы
Для характеристики действия силы за некоторый промежуток времени вводится понятие импульса силы.
Если сила – постоянная, то импульс силы  равен
равен

Направление импульса силы совпадает с направлением .
Единица измерения импульса в системе СИ –  , в системе МкГс –
, в системе МкГс –  .
.
Если сила переменная, то импульс силы за конечный промежуток времени  определяется как интеграл:
определяется как интеграл:

Импульс силы – сложная физическая величина, которая одновременно учитывает влияние модуля, направления и времени действия силы на изменение состояния движения тела.
Модуль импульса силы можно определить через его проекции на оси координат:

где  – проекции силы;
– проекции силы;
 – проекции импульса на оси координат.
– проекции импульса на оси координат.
Углы между вектором и осями координат определяются из следующих соотношений:

Теорема об изменении количества движения точки и системы
Одной из мер движения точки является количество ее движения.
Количеством движения точки называется вектор  , который равен произведению массы точки на ее скорость
, который равен произведению массы точки на ее скорость  и направлен по вектору скорости:
и направлен по вектору скорости:
 .
.
Понятие количества движения было введено в механику Декартом и положено в основу механики Ньютоном.
Единица измерения количества движения в системе СИ –  , в системе МкГс –
, в системе МкГс –  .
.
Если спроектировать вектор количества движения на оси координат, то ее проекции определяются следующим образом:

Теорема об изменении количества движения точки в дифференциальной форме имеет вид:

Производная по времени от количества движения материальной точки равна геометрической сумме всех сил, действующих на эту точку.
Теорема об изменении количества движения точки в интегральной форме:

Изменение количества движения точки за некоторый промежуток времени равно геометрической сумме импульсов всех сил, которые приложены к точке.
Векторному уравнению (7.1) соответствуют три уравнения в проекциях на оси координат:

Большинство практических задач решается с использованием выражения (7.2).
Количеством движения механической системы называется векторная величина  , равная геометрической сумме (главному вектору) количеств движения всех точек этой системы.
, равная геометрической сумме (главному вектору) количеств движения всех точек этой системы.

Найти можно путем построения многоугольника количеств движения всех точек системы (рис.7.1).
Замыкающая сторона векторного многоугольника будет представлять собой вектор .
Величина может быть какой угодно, даже равняться нулю, когда многоугольник, построенный из векторов  , оказывается замкнутым.
, оказывается замкнутым.

Формулу (7.3) можно записать в виде:

где – масса всей системы;
 – скорость центра масс системы.
– скорость центра масс системы.
Из этой формулы следует, что количество движения системы равно нулю, когда скорость центра масс равна нулю. Например, если тело вращается вокруг неподвижной оси, которая проходит через его центр масс, то количество движения тела равно нулю.
В случае, когда колесо катится, вектор  характеризует только поступательную часть плоского движения колеса.
характеризует только поступательную часть плоского движения колеса.
Теорема об изменении количества движения системы в дифференциальной форме выразится формулой:

где  – главный вектор всех внешних сил, которые действуют на механическую систему.
– главный вектор всех внешних сил, которые действуют на механическую систему.
Производная по времени от количества движения механической системы равна геометрической сумме всех действующих на точки системы внешних сил.
В проекциях на оси координат уравнение (7.5) соответствует уравнениям:

В интегральной форме теорема об изменении количества движения системы имеет вид:

где  – количество движения системы в начальный момент времени.
– количество движения системы в начальный момент времени.
 – количество движения системы в конечный момент времени.
– количество движения системы в конечный момент времени.
Изменение количества движения механической системы за некоторый промежуток времени равно геометрической сумме импульсов внешних сил, которые действуют на систему за тот же промежуток времени.
Векторному уравнению (7.7) соответствуют три уравнения в проекциях на оси координат:

Практическая ценность теоремы заключается в том, что она позволяет исключить из рассматривания неизвестные внутренние силы.
Закон сохранения количества движения системы
Выводы из теоремы об изменении количества движения системы, которые еще имеют название законов сохранения количества движения:
1. Если главный вектор внешних сил, действующих на систему, равен нулю, то вектор количества движения системы не меняется:
если 
то  и
и 
2. Если сумма проекций внешних сил на какую-либо ось, например , равна нулю, то проекция количества движения системы на эту ось сохраняется постоянной:
если 
то  и
и 
Эти результаты выражают законы сохранения количества движения системы. Из них вытекает, что внутренние силы не могут изменить количество движения системы.
Порядок решения задач на применение теоремы об изменении количества движения точки и механической системы
Для материальной точки:
Изобразить на рисунке все силы, приложенные к материальной точке, то есть активные силы и реакции связей.
Выбрать систему координат.
Записать теорему об изменении количества движения точки в векторной форме.
Спроектировать это векторное уравнение на оси выбранной системы координат.
Решить полученные уравнения и определить искомые величины.
Для механической системы:
Изобразить на рисунке все внешние силы.
Выбрать систему координат.
Записать теорему об изменении количества движения системы в векторной форме.
Спроектировать это векторное уравнение на оси выбранной системы координат.
Решить полученные уравнения и определить искомые величины.
Примеры решения задач на тему: Теорема об изменении количества движения точки и механической системы
Задача № 1
Железнодорожный поезд движется по горизонтальному и прямолинейному участку пути (рис.7.2). Во время торможения до полной остановки развивается сила сопротивления, равная  веса поезда. В момент начала торможения скорость
веса поезда. В момент начала торможения скорость  поезда составляла 72 км/ч.
поезда составляла 72 км/ч.

Определить время и путь  торможения.
торможения.
Решение. Изобразим силы, действующие на поезд во время торможения: сила тяжести поезда , нормальная реакция пути , сила сопротивления , которая по величине равна 
Выберем систему координат. Поскольку движение прямолинейное и горизонтальное, достаточно рассмотреть движение по направлению оси .
Запишем теорему об изменении количества движения поезда (рассматривая его как материальную точку) в интегральной форме:

где – масса поезда,
 – конечная и начальная скорость поезда,
– конечная и начальная скорость поезда,
 – сумма импульсов сил , , которые действуют на поезд во время торможения.
– сумма импульсов сил , , которые действуют на поезд во время торможения.
Спроектируем векторное уравнение (1) на ось :

Проекции импульсов сил  и
и  на ось равны нулю, поскольку векторы и перпендикулярны оси.
на ось равны нулю, поскольку векторы и перпендикулярны оси.
Сила сопротивления во время торможения по величине не изменяется, следовательно, ее импульс равен:

Скорость в конце участка торможения равна нулю, то есть 
Окончательно, уравнение импульсов (2) в проекции на ось приобретет вид:

или

откуда

С учетом числовых значений величин  и
и  имеем:
имеем:

Путь торможения определим из формулы для равнопеременного движения:

В этом случае ускорение поезда определяется из формулы:

то есть,

Тогда

Ответ: 
Задача № 2
По шероховатой наклонной плоскости, которая составляет с горизонтом угол  , спускается тяжелое тело без начальной скорости.
, спускается тяжелое тело без начальной скорости.
Определить время  , за которое тело пройдет путь длиной
, за которое тело пройдет путь длиной  , если коэффициент трения
, если коэффициент трения  и
и  .
.
Решение. Во время движения на тело действуют сила тяжести тела  , нормальная реакция поверхности и сила трения , которая направлена в сторону, противоположную движению(рис.7.3).
, нормальная реакция поверхности и сила трения , которая направлена в сторону, противоположную движению(рис.7.3).

Направим ось вдоль наклонной поверхности вниз и запишем теорему об изменении количества движения в векторной форме:

Спроектируем ровность (1) на ось :

Проекция импульса нормальной реакции на ось равна нулю, поскольку сила перпендикулярна .
Учитывая, что во время движения сила тяжести и сила трения не меняются , то

Кроме того

Итак, уравнение импульса (2) примет вид:

Вычислим силу трения:

Тогда уравнение (3) примет вид:

или 
откуда

Поскольку

то

Используя полученную зависимость, сначала подсчитаем ускорение тела, а после этого – время движения.
Поскольку

то
 и
и 
Из формулы  , учитывая, что при
, учитывая, что при  получим
получим 
Из этой формулы находим время движения :

Ответ: 
Задача № 3
На полигоне пушка, которая наклонена под углом  к горизонту, делает выстрел в мишень. Сила тяжести ствола пушки –
к горизонту, делает выстрел в мишень. Сила тяжести ствола пушки – 
 Сила тяжести снаряда равна
Сила тяжести снаряда равна  Скорость снаряда у дульного среза
Скорость снаряда у дульного среза 
Определить скорость  свободного отката ствола пушки в момент вылета снаряда.
свободного отката ствола пушки в момент вылета снаряда.
Решение. В задаче рассматривается движение материальной системы, состоящей из ствола и снаряда (рис.7.4).

На систему действуют внешние силы: тяжести ствола  и тяжести снаряда
и тяжести снаряда  . Внутренние силы определяются давлением пороховых газов
. Внутренние силы определяются давлением пороховых газов  . Эти силы необходимо исключить из рассмотрения, согласно теореме о количестве движения механической системы.
. Эти силы необходимо исключить из рассмотрения, согласно теореме о количестве движения механической системы.
Применим теорему об изменении количества движения системы:

где  – количество движения системы в конечный момент времени;
– количество движения системы в конечный момент времени;
– количество движения системы в начальный момент времени;
 – сумма импульсов всех внешних сил (
– сумма импульсов всех внешних сил ( , ).
, ).
Ось направим перпендикулярно векторам внешних сил и .
Спроектируем уравнение (1) на ось :

Поскольку проекции сил и на ось равны нулю, то и проекции импульсов  и
и  также равны нулю. Итак:
также равны нулю. Итак:
 или
или 
Таким образом, проекция количества движения системы на ось в конечный момент времени равна проекции количества движения системы в начальный момент времени.
В начальный момент времени (до выстрела) снаряд и ствол были неподвижны, следовательно, их количества движения равнялись нулю и

В момент вылета снаряда проекция количества движения системы на ось равна:

или

Поскольку

то

откуда
 и
и 
С учетом числовых значений:

Знак минус показывает, что скорость ствола направлена в сторону, противоположную скорости снаряда.
Ответ: 
Задача № 4
Буксирный пароход весом  набрал скорость
набрал скорость  , после чего натянулся буксирный канат, и баржа весом
, после чего натянулся буксирный канат, и баржа весом  двинулась вслед за пароходом.
двинулась вслед за пароходом.
Определить общую скорость парохода и баржи  , считая, что движущая сила и сила сопротивления воды уравновешиваются, то есть, (
, считая, что движущая сила и сила сопротивления воды уравновешиваются, то есть, ( )
)  дв = соп (
дв = соп ( ).
).
Решение. Для определения скорости применим теорему об изменении количества движения системы.
На систему, которая состоит из парохода и баржи, действуют внешние силы: силы тяжести  и
и  , силы выталкивания
, силы выталкивания  и
и  , которые приложены к баржи и буксиру, а также движущая сила дв и сила сопротивления воды соп (рис.7.5).
, которые приложены к баржи и буксиру, а также движущая сила дв и сила сопротивления воды соп (рис.7.5).

Внутренняя сила – натяжение буксирного каната  – неизвестна.
– неизвестна.
Ось направим горизонтально, вправо.
Запишем теорему об изменении количества движения данной системы в интегральной форме:

где  – количество движения системы баржа-буксир в тот момент времени, когда они начинают двигаться с одинаковой скоростью;
– количество движения системы баржа-буксир в тот момент времени, когда они начинают двигаться с одинаковой скоростью;
– количество движения этой системы в начальный момент времени;
 – сумма импульсов всех внешних сил.
– сумма импульсов всех внешних сил.
Спроектируем уравнение (1) на ось :

Поскольку по условиям дв = соп, а направлены они в разные стороны, то

Кроме того, проекции на ось сил тяжести парохода и баржи, а также выталкивающих сил и , равны нулю. Следовательно, проекции импульсов этих сил на ось тоже равны нулю. Таким образом уравнение проекций принимает вид:
 или
или 
Подсчитаем количество движения парохода и баржи в начальный момент времени, когда скорость парохода равна  , а скорость баржи
, а скорость баржи  .
.

Совместимое движение парохода и баржи происходит с одинаковой скоростью , поэтому количество движения системы в это время

Поскольку

то 
Отсюда имеем

Ответ: 
Задача № 5
Механическая система состоит из грузов 1 и 2 массами  и
и  соответственно, а также прямоугольной вертикальной плиты 3 массой
соответственно, а также прямоугольной вертикальной плиты 3 массой  которая движется вдоль горизонтальных направляющих( рис.7.6). В момент времени
которая движется вдоль горизонтальных направляющих( рис.7.6). В момент времени  , когда скорость плиты
, когда скорость плиты  груз под действием внутренних сил начинают двигаться по желобам плиты. Груз 1 движется по дуге окружности с радиусом
груз под действием внутренних сил начинают двигаться по желобам плиты. Груз 1 движется по дуге окружности с радиусом  по закону
по закону  , где выражено в радианах, – в секундах (ось, от которой ведется положительное направление отсчета угла показано на рисунке). Груз 2 движется от точки прямолинейно по закону
, где выражено в радианах, – в секундах (ось, от которой ведется положительное направление отсчета угла показано на рисунке). Груз 2 движется от точки прямолинейно по закону  , где
, где  выражено в метрах, – в секундах (на рисунке груз 2 изображен в положении положительного отсчета координаты ), угол
выражено в метрах, – в секундах (на рисунке груз 2 изображен в положении положительного отсчета координаты ), угол  .
.
Определить зависимость  , то есть, скорость движения плиты как функцию времени, считая грузы материальными точками и пренебрегая всеми силами сопротивления движения.
, то есть, скорость движения плиты как функцию времени, считая грузы материальными точками и пренебрегая всеми силами сопротивления движения.
Решение. Рассмотрим механическую систему в произвольном положении (рис.7.6).
Изобразим все внешние силы, действующие на систему: силы тяжести , ,  и реакцию направляющей .
и реакцию направляющей .
Проведем координатные оси так, чтобы ось проходила через точку  , где находится центр масс плиты в начальный момент времени
, где находится центр масс плиты в начальный момент времени 
Определим  с помощью теоремы об изменении количества движения механической системы в проекции на ось .
с помощью теоремы об изменении количества движения механической системы в проекции на ось .
Поскольку все внешние силы, действующие на систему, вертикальны, то  и, согласно (7.10), имеем:
и, согласно (7.10), имеем:
 или
или  , (1)
, (1)
где  – проекция количества движения системы в момент времени
– проекция количества движения системы в момент времени 
 – проекция количества движения системы в произвольный момент времени .
– проекция количества движения системы в произвольный момент времени .
Определим количества движения  и
и  :
:

где 
Выразим координаты и через координату  .
.
С рис.7.6 видно, что в произвольный момент времени абсцисса первого груза

а абсцисса второго груза

Тогда


Подставляя полученные выражения для  и
и  в (3), получим:
в (3), получим:

Поскольку  то
то

В соответствии с (1), выражения (2) и (4) равны, то есть:

Отсюда окончательно получим:

Ответ: 
Задачи, которые рекомендуются для самостоятельной работы: 28.3; 28.7; 36.9; 36.11; 36.16 [2].
Теорема об изменении момента количества движения точки и механической системы
Наряду с количеством движения, как векторной меры поступательного движения, для вращательного движения можно ввести момент количества движения.
Для материальной точки массой , которая имеет скорость , момент количества движения  относительно любого центра определяется из выражения (рис.8.1):
относительно любого центра определяется из выражения (рис.8.1):


Вектор момента количества движения прикладывается в точке , относительно которой он вычисляется. Если спроектировать обе части уравнения (8.1) на оси декартовой системы координат, получим моменты количества движения точки относительно осей координат:

Кинетическим моментом  или главным моментом количества движения механической системы относительно данного центра называется вектор, равный геометрической сумме моментов количеств движения всех материальных точек системы относительно этого же центра:
или главным моментом количества движения механической системы относительно данного центра называется вектор, равный геометрической сумме моментов количеств движения всех материальных точек системы относительно этого же центра:

Подобно тому, как количество движения системы является характеристикой поступательного движения, кинетический момент является характеристикой вращательного движения системы.
Кинетический момент твердого тела, которое вращается относительно оси с угловой скоростью , равной произведению угловой скорости тела на его момент инерции относительно оси вращения:

Производная по времени от момента количества движения точки, взятого относительно любого неподвижного центра равна моменту силы, действующей на эту точку, относительно того же центра:

Спроектировав это уравнение на оси координат, получим:

Если рассматривать движение системы, на которую действуют внешние  и внутренние силы
и внутренние силы  , то производная по времени от кинетического момента механической системы относительно некоторого центра равна геометрической сумме моментов всех внешних сил относительно того же центра:
, то производная по времени от кинетического момента механической системы относительно некоторого центра равна геометрической сумме моментов всех внешних сил относительно того же центра:

Проектируя обе части уравнения на неподвижные оси  и учитывая, что проекция вектора, который изображает момент силы относительно точки на ось, равна моменту силы относительно этой оси, получим:
и учитывая, что проекция вектора, который изображает момент силы относительно точки на ось, равна моменту силы относительно этой оси, получим:

Теорема об изменении кинетического момента позволяет изучать вращательное движение твердого тела вокруг оси и точки, или вращательную часть движения тела в общем случае движения свободного твердого тела.
Практическая ценность теоремы заключается еще и в том, что она позволяет при изучении движения системы исключить из рассмотрения неизвестные внутренние силы.
Из теорем об изменении кинетического момента системы (8.7)-(8.8) вытекают важные выводы:
Если сумма моментов относительно центра всех внешних сил, действующих на систему, равна нулю, то кинетический момент системы относительно той же точки является постоянным по величине и направлению, то есть,
если  , то
, то  и
и 
Если сумма моментов всех внешних сил, действующих на систему, относительно некоторой оси, например , равна нулю, то проекция кинетического момента на эту же ось является постоянной по величине, то есть,
если  . то
. то  и
и 
Дифференциальное уравнение вращательного движения тела вокруг неподвижной оси
Кинетический момент тела относительно оси вращения по уравнению (8.4) , если ось является осью вращения тела, равен:

Следовательно,

Сумма моментов внешних сил  относительно оси вращения называется вращательным моментом и обозначается
относительно оси вращения называется вращательным моментом и обозначается

Таким образом, дифференциальное уравнение вращательного движения тела имеет вид:

Из (8.9) следует, что произведение момента инерции тела относительно оси вращения на угловое ускорение тела равно вращательному моменту

Это уравнение позволяет решать следующие задачи:
– если заданы уравнения вращения тела  и его момент инерции , то можно определить вращательный момент:
и его момент инерции , то можно определить вращательный момент:

– если заданы внешние силы, приложенные к телу, начальные условия вращения  и
и  , момент инерции тела, то можно найти уравнение вращения тела :
, момент инерции тела, то можно найти уравнение вращения тела :

– определить момент инерции тела относительно оси вращения, если известны величины  и
и  :
:

Из уравнения  вытекают отдельные случаи:
вытекают отдельные случаи:
1. Если  , то
, то  , а если
, а если  , то и
, то и  . В этом случае тело вращается равномерно.
. В этом случае тело вращается равномерно.
2. Если  , то
, то  , а если
, а если  то и
то и  . Итак, твердое тело вращается равнопеременно.
. Итак, твердое тело вращается равнопеременно.
Порядок решения задач на применение теоремы об изменении момента количества движения точки и механической системы
Задачи, которые относятся к этой теме, можно разделить на следующие четыре основных типа:
Вычисление кинетического момента.
Изучение движения конкретной точки механической системы, если эта точка участвует во вращательном движении системы.
Изучение вращательного движения твердого тела.
Изучение движения механической системы, в которую входят тела, совершающие как поступательные, так и вращательные движения.
Задачи первого типа могут быть решены с помощью общих формул (8.4), (8.5).
Порядок решения задач второго типа может быть следующим:
- Выбрать систему координат.
- Изобразить все внешние силы, приложенные к материальной точке; в случае произвольной точки к этим силам добавить реакции внешних связей.
- Записать в скалярной форме выражение теоремы об изменении момента количества движения точки.
- Высчитать сумму моментов сил, которые приложены к материальной точке.
- Определить количество движения материальной точки и его момент относительно осей.
- Подставить данные пунктов 4 и 5 в уравнения (8.6) теоремы об изменении момента количества движения материальной точки.
- Решить, в соответствии с условием, прямую или обратную задачу динамики точки.
При решении задач третьего типа сохранять рекомендации первых двух пунктов, а далее делать следующим образом:
- Записать дифференциальное уравнение вращательного движения тела вокруг неподвижной оси (8.9).

- Определить момент инерции твердого тела относительно неподвижной оси.
- Подсчитать сумму моментов всех внешних сил относительно оси вращения.
- Величины, полученные в п. п. 4 и 5, подставить в уравнение (8.9).
- Записать начальные условия.
- Решить уравнение п. 6 в зависимости от условия, как прямую или обратную задачу.
При решении задач четвертого типа необходимо предварительно расчленить заданную систему на отдельные твердые тела, и к каждому из них, в зависимости от характера движения, применить одну из теорем: об изменении количества движения – в случае поступательного движения тел расчлененной системы; об изменении кинетического момента – при наличии тел, которые совершают вращательные движения.
Примеры решения задач на тему: Теорема об изменении момента количества движения точки и механической системы
Задача №1
Однородный круглый диск весом  и с радиусом
и с радиусом  катится без скольжения по горизонтальной плоскости, делая вокруг собственной оси 60 об/мин (рис.8.2).
катится без скольжения по горизонтальной плоскости, делая вокруг собственной оси 60 об/мин (рис.8.2).

Определить главный момент количеств движения диска  относительно оси , которая проходит через центр диска перпендикулярно плоскости движения.
относительно оси , которая проходит через центр диска перпендикулярно плоскости движения.
Решение. Главный момент количеств движения системы (кинетический момент) относительно оси вращения равен (8.6):

где – момент инерции тела относительно оси вращения,
– угловая скорость вращения.
В данном случае кинетический момент относительно оси, проходящей через центр диска , равен:


Ответ: 
Задача №2
Во время вращения барабана 1 весом и радиусом  вокруг неподвижной оси на его боковую поверхность наматывается невесомая и нерастяжимая нить, что вызывает движение груза 2 весом , который скользит по неподвижной гладкой горизонтальной плоскости (рис.8.3).
вокруг неподвижной оси на его боковую поверхность наматывается невесомая и нерастяжимая нить, что вызывает движение груза 2 весом , который скользит по неподвижной гладкой горизонтальной плоскости (рис.8.3).

Определить главный момент количества движения (кинетический момент) системы относительно оси и выразить его как зависимость от угловой скорости. Барабан считать однородным круглым цилиндром. Ось направлена перпендикулярно рисунку.
Решение. В состав механической системы входят два твердых тела: барабан 1 и груз 2.
Следовательно, кинетический момент системы равен:

где  – кинетический момент барабана;
– кинетический момент барабана;
 – кинетический момент груза относительно неподвижной оси .
– кинетический момент груза относительно неподвижной оси .
Кинетический момент барабана равен (8.5):

где

тогда

Главный момент количества движения груза, который движется поступательно, определяется как момент количества движения материальной точки, то есть:

поскольку

то

Окончательно

Ответ: 
Задача №3
Шарик , который находится в сосуде с жидкостью и прикреплен к концу стержня длиной , приводится в вращение вокруг вертикальной оси  с начальной угловой скоростью
с начальной угловой скоростью  (рис.8.4, а). Сила сопротивления жидкости пропорциональна угловой скорости вращения
(рис.8.4, а). Сила сопротивления жидкости пропорциональна угловой скорости вращения  :
:  , где – масса шарика, – коэффициент пропорциональности.
, где – масса шарика, – коэффициент пропорциональности.

Определить, через какой промежуток времени угловая скорость вращения станет вдвое меньше начальной, а также число оборотов , которое сделает стержень с шариком за этот промежуток времени. Массу шарика считать сосредоточенной в ее центре, массой стержня пренебречь.
Решение. Ось направим вдоль оси вращения и покажем силы, действующие на вал с шариком: силу сопротивления , которая направлена в сторону, противоположную вращению (рис.8.4, б), силу тяжести шарика , реакции  подшипника
подшипника  и
и  подпятника
подпятника  .
.
Все силы указаны на рисунках, направления сил и изображены произвольно.
Запишем дифференциальное уравнение вращательного движения шарика относительно оси :

где момент инерции шарика

Поскольку момент силы тяжести относительно оси равен нулю ( параллельна оси ), то вращательный момент  равен моменту силы сопротивления относительно оси (как известно, момент силы сопротивления всегда отрицательный):
равен моменту силы сопротивления относительно оси (как известно, момент силы сопротивления всегда отрицательный):

Следовательно, дифференциальное уравнение вращательного движения имеет вид:

или

Разделим переменные и проинтегрируем:

Произвольную постоянную определим по начальным условиям: при  .
.

Следовательно,

Высчитаем, через какой промежуток времени угловая скорость вращения станет вдвое меньше начальной, то есть,  .
.

Откуда:

Для определения числа оборотов, которые сделает стержень с шариком за промежуток времени , необходимо найти зависимость угла поворота от времени :

Следовательно,

Разделим переменные и проинтегрируем это дифференциальное уравнение:

Произвольную постоянную  определим по начальным условиям: при
определим по начальным условиям: при  .
.

Итак закон изменения угла поворота по времени имеет вид:

или

При  , угол поворота
, угол поворота  равен
равен

Поскольку за 1 оборот шарик обернется на  , то количество оборотов составит
, то количество оборотов составит

Ответ: 
Задача №4
Для определения момента трения в цапфах, на вал насажен маховик весом  , радиус инерции маховика
, радиус инерции маховика  Маховику придана угловая скорость, соответствующая
Маховику придана угловая скорость, соответствующая  об/мин. Без внешнего воздействия на него, он остановился через
об/мин. Без внешнего воздействия на него, он остановился через  мин.
мин.
Определить момент трения  , считая его постоянным.
, считая его постоянным.
Решение. Направим ось вдоль неподвижной оси вращения. Изобразим на рис.8.5 внешние нагрузки, действующие на вал и маховик: силу тяжести маховика , реакции опор  и и момент сил трения .
и и момент сил трения .
Запишем теорему об изменении кинетического момента относительно оси вращения:

Поскольку мы рассматриваем вращение твердого тела, то

Найдем вращательный момент внешних сил относительно оси вращения , если учтем, что момент сил , и относительно оси равны нулю, поскольку эти силы пересекают ось. Следовательно, вращательный момент равен моменту сил трения и направлен в сторону, противоположную вращению маховика.
Таким образом

Высчитаем величины, которые входят в это уравнение:

где – угловая скорость маховика в момент остановки,  ,
,
 – угловая скорость в начальный момент времени.
– угловая скорость в начальный момент времени.
Поскольку  то
то 
С учетом значений и  получим:
получим:

Ответ: 
Задача №5
Однородный цилиндр (рис.8.6) радиусом вращается вокруг своей геометрической оси  угловой скоростью
угловой скоростью  .
.

Определить, как изменится угловая скорость  цилиндра, если ось вращения перейдет в положение , которое совпадает с образующей цилиндра?
цилиндра, если ось вращения перейдет в положение , которое совпадает с образующей цилиндра?
Решение. На цилиндр действует сила тяжести , которая направлена вертикально вниз.
Запишем теорему об изменении кинетического момента цилиндра:

где  – момент инерции цилиндра,
– момент инерции цилиндра,
 – сумма моментов внешних сил относительно оси вращения.
– сумма моментов внешних сил относительно оси вращения.
Поскольку сила параллельна оси вращения, то
 и
и 
Итак,  , тогда
, тогда

где  – момент инерции цилиндра относительно оси ,
– момент инерции цилиндра относительно оси ,
 – момент инерции цилиндра относительно оси ,
– момент инерции цилиндра относительно оси ,
По теореме Гюйгенса-Штейнера

где – масса цилиндра.
Из формулы (1) получим:

Вычислим и :

Следовательно,

Угловая скорость уменьшилась в три раза, поскольку в три раза увеличился момент инерции.
Ответ: 
Задача №6
Молотильный барабан начинает вращаться из состояния покоя ( ) под действием постоянного момента
) под действием постоянного момента 
Определить, пренебрегая трением, частоту вращения барабана после того, как он начнет вращаться и сделает  оборотов (рис.8.7), зная, что момент инерции барабана относительно оси вращения
оборотов (рис.8.7), зная, что момент инерции барабана относительно оси вращения 

Решение. Для определения угловой скорости барабана воспользуемся формулой:

где – начальная угловая скорость вращения,
– конечная угловая скорость вращения,
– угол, на который поворачивается барабан.
Из (1) вытекает:
 где
где 
Следовательно,

Таким образом, для определения угловой скорости необходимо знать угловое ускорение  .
.
Для определения воспользуемся теоремой об изменении кинетического момента:

где  – сумма моментов всех внешних сил относительно оси вращения.
– сумма моментов всех внешних сил относительно оси вращения.
На барабан действуют следующие внешние нагрузки: – сила тяжести барабана;  ,
,
 – реакции подшипников и ; – вращательный момент.
– реакции подшипников и ; – вращательный момент.
С учетом действующих сил уравнение (2) будет иметь вид:

При этом  , поскольку силы , и
, поскольку силы , и
пересекают ось и моментов не образуют. Итак,

Тогда,

Ответ: 
Задача №7
Груз весом  подвешен на канате, который навитый на цилиндрический барабан, ось вращения которого горизонтальна (рис.8.8).
подвешен на канате, который навитый на цилиндрический барабан, ось вращения которого горизонтальна (рис.8.8).

Определить угловое ускорение барабана во время опускания груза , пренебрегая весом каната, сопротивлением воздуха, трением в подшипниках. Барабан считать однородным цилиндром весом  и радиусом
и радиусом 
Решение. Для определения углового ускорения барабана будем рассматривать движение системы, в которую включим следующие тела: барабан весом , груз весом и канат, натяжение которого заранее неизвестно.
Если применить теорему об изменении кинетического момента системы относительно оси, то натяжение каната, являющегося внутренней силой, в уравнение не войдет.
Относительно оси, которая проходит через точку , эта теорема имеет вид:

На систему действуют следующие внешние силы: – вес груза, – вес барабана, – реакция опоры .
Силы и не создают моментов относительно оси , потому что они ее пересекают. Только сила создает момент относительно оси , который равен:

Итак,

Определим кинетический момент системы относительно оси вращения :

где  – кинетический момент барабана,
– кинетический момент барабана,
 – кинетический момент груза.
– кинетический момент груза.

где  – момент инерции барабана относительно оси вращения ;
– момент инерции барабана относительно оси вращения ;

поскольку 
Тогда кинетический момент системы равен:

Подставим полученные результаты в уравнение (1):

Знак момента силы взят положительным, поскольку направление вращения барабана совпадает с направлением момента силы .
Решаем уравнение (2) и определяем угловое ускорение .
Выносим из под знака дифференциала в левой части уравнения (2) постоянные величины:

или

С учетом числовых значений угловое ускорение равно:

Ответ: 
Теорема об изменении кинетической энергии механической системы
Теорема о кинетической энергии системы — одна из общих теорем динамики, является следствием законов Ньютона. Связывает кинетическую энергию механической системы с работой сил, действующих на тела, составляющие систему.
Кинетическая энергия механической системы
Кинетической энергией материальной точки называется скалярная положительная величина, равная половине произведения массы точки на квадрат ее скорости:

Кинетической энергией механической системы называется арифметическая сумма кинетических энергий всех точек механической системы:

Кинетическая энергия системы не зависит от направлений скоростей точек.
Кинетическая энергия может равняться нулю, если скорости всех точек системы равны нулю.
Кинетическая энергия системы характеризует и поступательное, и вращательное движения системы. Поэтому теоремой об изменении кинетической энергии особенно часто пользуются при решении задач.
Единицей кинетической энергии в системе СИ является Джоуль (Дж).
Определение кинетической энергии твердого тела в различных случаях его движения
Поступательное движение твердого тела:
При поступательном движении твердого тела скорости всех его точек (в том числе скорость центра масс тела) в каждый момент времени равны между собой; то есть, для любой точки  . Итак
. Итак

Кинетическая энергия твердого тела при поступательном движении равна половине произведения массы тела на квадрат скорости его центра масс.
Вращательное движение твердого тела:
Скорость любой точки твердого тела, которое вращается с угловой скоростью , равна

где  – расстояние от точки к оси вращения.
– расстояние от точки к оси вращения.
Тогда кинетическая энергия тела определяется согласно зависимости:

Поскольку

то

Следовательно кинетическая энергия тела при вращательном движении равна половине произведения момента инерции тела относительно оси вращения на квадрат угловой скорости тела.
Плоскопараллельное движение твердого тела:
При плоскопараллельном движении скорости всех точек тела в каждый момент времени распределены так, будто тело вращается вокруг оси, которая перпендикулярна плоскости движения и которая проходит через мгновенный центр скоростей .
В этом случае кинетическую энергию тела можно определить по формуле:

где  – момент инерции тела относительно оси, которая проходит через мгновенный центр скоростей.
– момент инерции тела относительно оси, которая проходит через мгновенный центр скоростей.
Поскольку (согласно теореме Штейнера-Гюйгенса)

где  – момент инерции относительно оси, которая проходит через центр масс тела и параллельна мгновенной оси вращения, то
– момент инерции относительно оси, которая проходит через центр масс тела и параллельна мгновенной оси вращения, то

Поскольку  , то окончательно
, то окончательно

Таким образом,
в случае плоскопараллельного движения тела кинетическая энергия состоит из кинетических энергий поступательного движения вместе со скоростью центра масс и вращательного движения вокруг оси, которая проходит через центр масс перпендикулярно плоскости движения.
Теорема об изменении кинетической энергии механической системы:
Дифференциальная форма:
Дифференциал кинетической энергии механической системы равен сумме элементарных работ всех внешних и внутренних сил, действующих на систему:

Производная по времени от кинетической энергии механической системы равна сумме мощностей всех внешних и внутренних сил, действующих на систему:

Интегральная форма:
Изменение кинетической энергии механической системы при конечном перемещении ее из положения (1) в положение (2) равно сумме работ на этом перемещении всех внешних и внутренних сил, действующих на эту систему

Если механическая система неизменна, то сумма работ внутренних сил равна нулю и теорема запишется так:

Порядок решения задач на использование теоремы об изменении кинетической энергии механической системы
Решение задач с помощью теоремы об изменении кинетической энергии в интегральной форме рекомендуется проводить в следующей последовательности:
а) изобразить на рисунке все внешние силы системы;
б) высчитать сумму работ всех внешних сил на перемещении точек системы;
в) вычислить кинетическую энергию системы материальных точек в начальном и конечном ее состояниях;
г ) пользуясь результатами подсчетов по пунктам б) и в) записать теорему об изменении кинетической энергии механической системы и определить искомую величину.
Примеры решения задач на тему: Теорема об изменении кинетической энергии механической системы
Задача № 1
Механизм эллипсографа (рис.10.1) состоит из ползунов и весом каждый, кривошипа  весом
весом  , и линейки весом
, и линейки весом  . Кривошип
. Кривошип  вращается вокруг неподвижной оси , которая перпендикулярна плоскости чертежа с угловой скоростью .
вращается вокруг неподвижной оси , которая перпендикулярна плоскости чертежа с угловой скоростью .
Определить кинетическую энергию механизма эллипсографа, полагая, что линейка и кривошип – однородные тонкие стержни, а ползуны и – материальные точки, а также, что 

Решение. Заданная механическая система состоит из четырех тел: кривошипа 1 и линейки 2, ползунов 3 и 4.
Кинетическая энергия всей системы равна:

где  – кинетическая энергия кривошипа 1,
– кинетическая энергия кривошипа 1,
 – кинетическая энергия линейки 2,
– кинетическая энергия линейки 2,
 – кинетическая энергия ползунов 3 и 4.
– кинетическая энергия ползунов 3 и 4.
Кривошип совершает вращательное движение вокруг неподвижной оси , которая перпендикулярна оси рисунка. В этом случае кинетическая энергия тела равна

Тогда

Линейка 2 движется плоскопараллельно. Ее кинетическая энергия равна

где  – скорость точки С, которая является центром масс линейки 2,
– скорость точки С, которая является центром масс линейки 2,
 – угловая скорость линейки 2,
– угловая скорость линейки 2,
 – момент инерции линейки относительно оси
– момент инерции линейки относительно оси  , которая проходит через центр масс линейки .
, которая проходит через центр масс линейки .
Для определения угловой скорости линейки 2 используем понятие мгновенного центра скоростей. Как известно, мгновенный центр скоростей находится на пересечении перпендикуляров к скоростям двух точек тела, движущихся плоскопараллельно. Тогда в нашем случае он будет расположен в точке , и скорость точки определится:

С другой стороны, точка принадлежит звену 1, и ее скорость равна

Тогда, учитывая, что  получим:
получим:

Момент инерции линейки относительно оси равен:

С учетом полученных значений  кинетическая энергия линейки 2 равна:
кинетическая энергия линейки 2 равна:

Подсчитаем кинетическую энергию ползунов 3 и 4, которые двигаются поступательно:
 .
.
Скорости точек можно определить, учитывая положение мгновенного центра скоростей линейки 2:

Тогда

Подставляя найденные выражения (2), (4), (5) в (1), получим:

Ответ: 
Задача № 2
На рисунке 10.2 изображен подъемный механизм лебедки. Груз весом поднимается с помощью невесомого и нерастяжимого троса, который переброшен через блок и намотан на барабан радиусом и весом . К барабану приложен вращательный момент, который пропорционален квадрату угла поворота барабану:

где – постоянный коэффициент.

Определить скорость груза в момент, когда он поднимется на высоту . Массу барабана считать равномерно распределенной вдоль его обода. Блок – сплошной диск весом  . В начальный момент система находилась в покое.
. В начальный момент система находилась в покое.
Решение. Изобразим на рисунке все внешние силы, действующие на барабан , блок и груз : силы тяжести , , ; вращательный момент, а также реакции шарниров  и
и  . Внутренней силой является натяжение троса
. Внутренней силой является натяжение троса  .
.
Запишем теорему об изменении кинетической энергии системы:

где  – кинетическая энергия системы в конечном положении;
– кинетическая энергия системы в конечном положении;
 – кинетическая энергия системы в исходном положении;
– кинетическая энергия системы в исходном положении;
 – сумма работ всех внешних сил на перемещении ;
– сумма работ всех внешних сил на перемещении ;
 – сумма работ всех внутренних сил на перемещении .
– сумма работ всех внутренних сил на перемещении .
Поскольку в начальный момент времени система находилась в состоянии покоя, то

В связи с тем, что трос не растягивается и при движении системы находится в натянутом состоянии, сумма работ внутренних сил системы равна нулю, следовательно

При поднятии груза на высоту сумма работ равна:

Поскольку точки приложения сил  и
и  – неподвижны, то
– неподвижны, то

Работа силы равна:

Работа вращательного момента в случае, когда он не меняется

где – угол поворота тела под действием момента.
Поскольку в нашем случае вращательный момент меняется, то его работа определится следующим образом:

Определим угол , на который вернулся барабан при подъеме груза на высоту :

Следовательно,

Таким образом,

Перейдем к подсчету кинетической энергии системы в конечном положении:

где  – кинетическая энергия груза ;
– кинетическая энергия груза ;
 – кинетическая энергия диска ;
– кинетическая энергия диска ;
 – кинетическая энергия барабана .
– кинетическая энергия барабана .
Груз движется поступательно и его кинетическая энергия равна:

Диск совершает вращательное движение, его кинетическая энергия определяется из выражения:
где  – момент инерции диска относительно оси вращения;
– момент инерции диска относительно оси вращения;
 – угловая скорость диска.
– угловая скорость диска.
Поскольку диск – сплошной, то равен:

где  – радиус диска.
– радиус диска.
Поскольку линейная скорость обода диска равна скорости груза, угловая скорость вращения  :
:

Итак,

Кинетическая энергия барабана , поскольку он совершает вращательное движение, равна:

Поскольку масса барабана распределена по ободу, то:

Угловую скорость барабана высчитаем из условия равенства линейных скоростей на ободах диска и барабана:

Откуда

Таким образом

Кинетическая энергия системы в конечном положении равна

Итак, теорема об изменении кинетической энергии системы имеет вид:

Решая это уравнение относительно  , находим скорость груза после того, как он пройдет путь :
, находим скорость груза после того, как он пройдет путь :

Ответ: 
Задача № 3
Груз (рис.10.3) весом , опускаясь вниз с помощью перекинутого через неподвижный блок невесомого и нерастяжимого троса, поднимает вверх груз весом , который закреплен к оси подвижного блока . Блоки и считать однородными сплошными дисками весом каждый.

Определить скорость груза в момент, когда он опустится на высоту . Скольжением на ободах блоков и силами сопротивления пренебречь.
В начальный момент система находилась в состоянии покоя.
Решение. Изобразим внешние силы, которые действуют на систему: силы тяжести  ; реакцию шарнира
; реакцию шарнира  и реакцию в точке –
и реакцию в точке –  . Внутренней силой является натяжение троса .
. Внутренней силой является натяжение троса .
Запишем теорему об изменении кинетической энергии системы:

В начальный момент времени система находилась в покое, следовательно,  . Работа внутренней силы натяжения троса, равна нулю. Итак,
. Работа внутренней силы натяжения троса, равна нулю. Итак,

Сумма работ внешних сил при перемещении системы в конечное положение составляет:

Работа сил  равна нулю, поскольку точки приложения сил 3
равна нулю, поскольку точки приложения сил 3  неподвижны.
неподвижны.
Итак,

Работа силы при опускании груза на высоту равна:

Работу силы тяжести блока определим следующим образом. При опускании груза на высоту точка  блока поднимается вверх на расстояние
блока поднимается вверх на расстояние  , которая равна , а центр блока на величину
, которая равна , а центр блока на величину  , так как точка – мгновенный центр скоростей блока .
, так как точка – мгновенный центр скоростей блока .
Таким образом,

Груз поднимается вверх так же на величину  . Тогда работа силы тяжести груза будет равна:
. Тогда работа силы тяжести груза будет равна:

Итак,

Вычислим кинетическую энергию системы в конечном положении:

Груз перемещается поступательно и его кинетическая энергия равна

где  – скорость груза в конце перемещения.
– скорость груза в конце перемещения.
Блок осуществляет плоскопараллельное движение. В этом случае:

Кинетическая энергия поступательного движения блока равна:

Поскольку точка – мгновенный центр скоростей блока , а скорость точки равна скорости груза , то скорость вращения блока :

Тогда

Таким образом,

Кинетическая энергия вращательного движения блока определяется из равенства:

где  – момент инерции блока относительно оси, которая проходит через центр масс . Блок – сплошной однородный диск, поэтому
– момент инерции блока относительно оси, которая проходит через центр масс . Блок – сплошной однородный диск, поэтому

Тогда

Таким образом, кинетическая энергия блока равна:

Блок совершает вращательное движение и его кинетическая энергия:

то есть

Груз совершает поступательное движение со скоростью точки то есть со скоростью  . Поэтому
. Поэтому

Следовательно, кинетическая энергия системы  в конечном положении:
в конечном положении:

Таким образом, теорема об изменении кинетической энергии системы имеет вид:

Находим скорость груза , решая это уравнение относительно  :
:

Ответ: 
Задача № 4
Прямоугольная пластинка  (рис.10.4) со сторонами и , и весом вращается вокруг вертикальной оси с начальной угловой скоростью . Каждый элемент пластинки несет при этом сопротивление воздуха, направление которого перпендикулярно плоскости пластинки, а величина пропорциональна площади элемента и квадрату его скорости. Коэффициент пропорциональности равен
(рис.10.4) со сторонами и , и весом вращается вокруг вертикальной оси с начальной угловой скоростью . Каждый элемент пластинки несет при этом сопротивление воздуха, направление которого перпендикулярно плоскости пластинки, а величина пропорциональна площади элемента и квадрату его скорости. Коэффициент пропорциональности равен  .
.

Определить, сколько оборотов сделает пластинка к тому мгновению, когда ее угловая скорость станет вдвое меньше начальной?
Решение. Поскольку силы сопротивления, приложенные к пластинке, не постоянные, а зависят от скорости, то для решения задачи воспользуемся теоремой об изменении кинетической энергии системы в дифференциальной форме:

Высчитаем дифференциал кинетической энергии пластинки. Поскольку пластинка вращается вокруг неподвижной оси, то ее кинетическая энергия равна:

откуда:

где – момент инерции пластинки относительно оси .
Перейдем к определению суммы элементарных работ внешних сил, которые действуют на пластинку. Это такие силы (рис.10.4):
– сила тяжести пластинки ;
– реакции в опорах и  :
:  и
и  ;
;
– сила сопротивления воздуха .
Итак,

где  – элементарная работа силы тяжести пластинки;
– элементарная работа силы тяжести пластинки;
 – элементарные работы реакций подшипников;
– элементарные работы реакций подшипников;
 – элементарная работа силы сопротивления .
– элементарная работа силы сопротивления .
Работы реакций и равны нулю, ибо точки их приложения неподвижны. Работа силы тяжести тоже равна нулю в связи с тем, что высота центра тяжести пластинки не меняется.
Таким образом,

Для вычета работы сил сопротивления воспользуемся формулой для работы сил, которые приложены к вращающемуся твердому телу:

где  – сумма моментов всех приложенных к телу сил относительно оси вращения;
– сумма моментов всех приложенных к телу сил относительно оси вращения;
 – элементарный угол поворота.
– элементарный угол поворота.
Чтобы определить , разобьем пластинку на элементарные прямоугольники со сторонами и  . Тогда сила сопротивления, приложенная к элементарному прямоугольнику, будет равняться:
. Тогда сила сопротивления, приложенная к элементарному прямоугольнику, будет равняться:

и

Следовательно,

или

и
 .
.
Таким образом, уравнение (1) принимает вид:

Разделим переменные и проинтегрируем:

Момент инерции пластинки составляет:

Тогда

Откуда находим:

Число оборотов составляет:

Ответ: 
Услуги по теоретической механике:
- Заказать теоретическую механику
- Помощь по теоретической механике
- Заказать контрольную работу по теоретической механике
Учебные лекции:
- Статика
- Система сходящихся сил
- Момент силы
- Пара сил
- Произвольная система сил
- Плоская произвольная система сил
- Трение
- Расчет ферм
- Расчет усилий в стержнях фермы
- Пространственная система сил
- Произвольная пространственная система сил
- Плоская система сходящихся сил
- Пространственная система сходящихся сил
- Равновесие тела под действием пространственной системы сил
- Естественный способ задания движения точки
- Центр параллельных сил
- Параллельные силы
- Система произвольно расположенных сил
- Сосредоточенные силы и распределенные нагрузки
- Кинематика
- Кинематика твердого тела
- Движения твердого тела
- Динамика материальной точки
- Динамика плоского движения твердого тела
- Динамика относительного движения материальной точки
- Динамика твердого тела
- Кинематика простейших движений твердого тела
- Общее уравнение динамики
- Работа и мощность силы
- Обратная задача динамики
- Поступательное и вращательное движение твердого тела
- Плоскопараллельное (плоское) движение твёрдого тела
- Сферическое движение твёрдого тела
- Движение свободного твердого тела
- Сложное движение твердого тела
- Сложное движение точки
- Плоское движение тела
- Статика твердого тела
- Равновесие составной конструкции
- Равновесие с учетом сил трения
- Центр масс
- Колебания материальной точки
- Относительное движение материальной точки
- Статические инварианты
- Дифференциальные уравнения движения точки под действием центральной силы и их анализ
- Динамика системы материальных точек
- Общие теоремы динамики
- Теорема об изменении кинетической энергии
- Теорема о конечном перемещении плоской фигуры
- Потенциальное силовое поле
- Метод кинетостатики
- Вращения твердого тела вокруг неподвижной точки
Ускорение центра масс. Определение этого термина вытекает из двух определений — ускорение точки и центр масс. Ускорение точки — производная вектора скорости этой точки по времени или вторая производная радиус-вектора этой точки по времени.
Не помню, как по ГоСТу определяется центр масс, но что-то вроде
Центр масс — точка, к которой приложена равнодействующая сил тяжести в однородном поле.
Для тел однородных тел простой формы — центр масс находится в геометрическом центре. Для стержня — в середине стержня.
При равномерном вращательном движении тела ускорение центра масс направлено к оси вращения. При неравномерном вращении ускорение центра масс складывается из нормального (центростремительного) ускорения и тангенциального (касательного) ускорения. Центростремительное связано с поворотом вектора скорости, тангенциальное — с изменением абсолютной величины скорости.
В системе изображённой на рисунке вращение будет неравномерным, поскольку сила тяжести создаёт момент силы вокруг оси вращения. В этом случае задачу надо решать так.
Находим момент силы тяжести относительно оси вращения M=mg (L/2) cosφ
Находим момент инерции стержня относительно оси вращения I=m(L/2)^2 + mL^2 / 12 = mL^2 / 3
Находим угловое ускорение ε=M/I
Находим тангенциальное ускорение центра масс aτ=ε L/2
Находим нормальное ускорение центра масс an=ω² (L/2), мгновенная угловая скорость ω = v / L
Дальше находим арктангенс отношения тангенциального и нормального ускорения, это и будет угол между направлением ускорения центра масс и направлением из центра масс на ось вращения
Чтобы найти силу направление нормальной реакции нужно записать второй закон Ньютона в проекциях на нормальную и тангенциальную оси:
Nτ+mg cosφ = maτ ⇒ Nτ=maτ-mg cosφ
Nn-mg sinφ = man ⇒ Nn=man+mg sinφ
Чтобы задать направление, находим арктангенс отношения тангенциальной и нормальной составляющих
Черноуцан А. Задачи на центр масс // Квант. — 1996. — № 2. — С. 43-45.
По специальной договоренности с редколлегией и редакцией журнала «Квант»
При решении механических задач неоценимую помощь может оказать использование понятия центра масс системы материальных точек. Одни задачи просто невозможно решить, не прибегая к этому понятию, решение других с его помощью может стать гораздо проще и нагляднее.
Перед тем как обсуждать конкретные задачи, напомним основные свойства центра масс и проиллюстрируем их примерами.
Центром масс (центром инерции) системы материальных точек назовем точку, характеризующую распределение масс в системе, координаты которой определяются формулами
Здесь mi — массы материальных точек, образующих систему, xi, yi, zi — координаты этих точек. Читатели, знакомые с понятием радиуса-вектора, предпочтут векторную запись:
 (1)
(1)
Пример 1. Найдем положение центра масс, простейшей системы, состоящей из двух точек, массы которых m1 и m2 и расстояние между ними l (рис. 1).
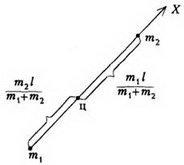
Рис. 1
Направив ось X от первой точки ко второй, получим, что расстояние от первой точки до центра масс (т.е. координата центра масс) равно  а расстояние от центра масс до второй точки равно
а расстояние от центра масс до второй точки равно  т.е. отношение расстояний обратно отношению масс. Значит, в этом случае положение центра масс совпадает с центром тяжести.
т.е. отношение расстояний обратно отношению масс. Значит, в этом случае положение центра масс совпадает с центром тяжести.
Обсудим некоторые свойства центра масс, что, как нам кажется, наполнит физическим содержанием приведенное выше несколько формальное определение этого понятия.
1) Положение центра масс не изменится, если какую-то часть системы заменить одной точкой с массой, равной массе этой подсистемы, и находящейся в ее центре масс.
Пример 2. Рассмотрим плоский однородный треугольник и найдем положение его центра масс. Разделим треугольник на тонкие полоски, параллельные одной из сторон, и заменим каждую полоску точкой, расположенной в ее середине. Так как все такие точки лежат на медиане треугольника, центр масс тоже должен лежать на медиане. Повторяя рассуждения для каждой из сторон, получаем, что центр масс находится на пересечении медиан.
2) Скорость центра масс можно найти, взяв производную по времени от обеих частей равенства (1):
 (2)
(2)
где  — импульс системы, m — полная масса системы. Видно, что скорость центра масс замкнутой системы постоянна. Значит, если связать с центром масс поступательно движущуюся систему отсчета, то она будет инерциальной.
— импульс системы, m — полная масса системы. Видно, что скорость центра масс замкнутой системы постоянна. Значит, если связать с центром масс поступательно движущуюся систему отсчета, то она будет инерциальной.
Пример 3. Поставим однородный стержень длиной l вертикально на гладкую плоскость (рис. 2) и отпустим. В процессе падения как горизонтальная составляющая его импульса, так и горизонтальная составляющая скорости центра масс будут оставаться равными нулю. Поэтому в момент падения центр стержня окажется в том месте, где первоначально стоял стержень, а концы стержня сместятся по горизонтали на  .
.

Рис. 2
3) Ускорение центра масс равно производной от его скорости по времени:
 (3)
(3)
где в правой части равенства стоят только внешние силы, так как все внутренние силы сокращаются по третьему закону Ньютона. Получаем, что центр масс, движется так, как двигалась бы воображаемая точка с массой, равной массе системы, под действием результирующей внешней силы. Наверное, это самое физическое свойство центра масс.
Пример 4. Если бросить палку, приведя ее при этом во вращение, то центр масс палки (ее середина) будет двигаться с постоянным ускорением  по параболе (рис. 3).
по параболе (рис. 3).
Рис. 3
4) Пусть система точек находится в однородном поле тяжести. Тогда суммарный момент сил тяжести относительно любой оси, проходящей через центр масс, равен нулю. Это значит, что равнодействующая сил тяжести проходит через центр масс, т.е. центр масс является также центром тяжести.
5) Потенциальная энергия системы точек в однородном поле тяжести вычисляется по формуле

где hц — высота центра масс системы.
Пример 5. При выкапывании в однородном фунте ямы глубиной h и разбрасывании грунта по поверхности его потенциальная энергия возрастает на  , где m — масса извлеченного грунта.
, где m — масса извлеченного грунта.
6) И еще одно полезное свойство центра масс. Кинетическая энергия системы точек может быть представлена в виде суммы двух слагаемых: кинетической энергии общего поступательного движения системы, равной  , и кинетической энергии Eотн движения относительно системы отсчета, связанной с центром масс:
, и кинетической энергии Eотн движения относительно системы отсчета, связанной с центром масс:
Пример 6. Кинетическая энергия обруча, катящегося без проскальзывания по горизонтальной поверхности со скоростью υ, равна
так как относительное движение в этом случае представляет собой чистое вращение, для которого линейная скорость точек обруча равна υ (полная скорость нижней точки должна быть равна нулю).
Теперь приступим к разбору задач на использование центра масс.
Задача 1. Однородный стержень лежит на гладкой горизонтальной поверхности. К стержню прикладывают две одинаковые по величине, но противоположные по направлению горизонтальные силы: одна сила приложена к середине стержня, другая — к его концу (рис. 4). Относительно какой точки начнет поворачиваться стержень?
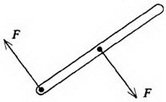
Рис. 4
На первый взгляд может показаться, что осью вращения будет точка, лежащая посередине между точками приложения сил. Однако уравнение (3) показывает, что поскольку сумма внешних сил равна нулю, то равно нулю и ускорение центра масс. Значит, центр стержня будет оставаться в покое, т.е. служить осью вращения.
Задача 2. Тонкий однородный стержень длиной l и массой m привели в движение вдоль гладкой горизонтальной поверхности так, что он движется поступательно и одновременно вращается с угловой скоростью ω. Найдите, натяжение стержня в зависимости от расстояния x до его центра.
Перейдем в инерциальную систему отсчета, связанную с центром стержня. Рассмотрим движение куска стержня, заключенного между рассматриваемой точкой стержня (расположенной на расстоянии x от центра) и его концом (рис. 5).
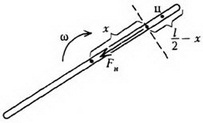
Рис. 5
Единственной внешней силой для этого куска является искомая сила натяжения Fн, масса равна  , а его центр масс движется по окружности радиусом
, а его центр масс движется по окружности радиусом  с ускорением
с ускорением  . Записывая уравнение движения центра масс выделенного куска, получим
. Записывая уравнение движения центра масс выделенного куска, получим

Задача 3. Двойная звезда состоит из двух звезд-компонентов массами m1 и m2, расстояние между которыми не меняется и остается равным L. Найдите период вращения двойной звезды.
Рассмотрим движение звезд-компонентов в инерциальной системе отсчета, связанной с центром масс двойной звезды. В этой системе отсчета звезды движутся с одной и той же угловой скоростью по окружностям разных радиусов (рис. 6).
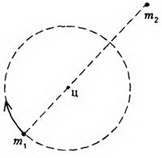
Рис. 6
Радиус вращения звезды массой m1 равен  (см. Пример 1), а ее центростремительное ускорение создается силой притяжения к другой звезде:
(см. Пример 1), а ее центростремительное ускорение создается силой притяжения к другой звезде:

Видим, что период вращения двойной звезды равен
и определяется полной массой двойной звезды, независимо от того, как она распределена между звездами-компонентами.
Задача 4. Две точечные массы m и 2m связаны невесомой нитью длиной l и движутся по гладкой горизонтальной плоскости. В некоторый момент времени скорость массы 2m равна нулю, а скорость массы m равна υ и направлена перпендикулярно нити (рис. 7). Найдите натяжение нити и период вращения системы.
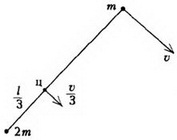
Рис. 7
Центр масс системы находится на расстоянии  от массы 2m и движется со скоростью
от массы 2m и движется со скоростью  . В системе отсчета, связанной с центром масс, точка массой 2m движется по окружности радиусом со скоростью . Значит, период вращения равен
. В системе отсчета, связанной с центром масс, точка массой 2m движется по окружности радиусом со скоростью . Значит, период вращения равен  (проверьте, что такой же ответ получается, если рассмотреть точку массой m). Натяжение нити найдем из уравнения движения любой из двух точек:
(проверьте, что такой же ответ получается, если рассмотреть точку массой m). Натяжение нити найдем из уравнения движения любой из двух точек:
Задача 5. На гладкой горизонтальной плоскости лежат два одинаковых бруска массой m каждый, связанных легкой пружиной жесткостью k (рис. 8). Первому бруску сообщают скорость υ0 в направлении от второго бруска. Опишите движение системы. Через какое время деформация пружины впервые достигнет максимального значения?

Рис. 8
Центр масс системы будет перемещаться с постоянной скоростью  . В системе отсчета центра масс начальная скорость каждого бруска равна , а жесткость половинной пружины, которая соединяет его с неподвижным центром масс, составляет 2k (жесткость пружины обратно пропорциональна ее длине). Период таких колебаний равен
. В системе отсчета центра масс начальная скорость каждого бруска равна , а жесткость половинной пружины, которая соединяет его с неподвижным центром масс, составляет 2k (жесткость пружины обратно пропорциональна ее длине). Период таких колебаний равен

а амплитуда колебаний каждого бруска, которую можно найти из закона сохранения энергии, составляет

В первый раз деформация станет максимальной через четверть периода, т.е. через время  .
.
Задача 6. Шар массой m налетает со скоростью υ на покоящийся шар массой 2m. Найдите скорости обоих шаров после упругого центрального удара.
В системе отсчета, связанной с центром масс, полный импульс двух шаров равен нулю как до, так и после coyдарения. Легко догадаться, какой ответ для конечных скоростей удовлетворяет одновременно и этому условию, и закону сохранения энергии: скорости останутся такими же, как до удара, по величине, но изменят свои направления на противоположные. Скорость центра масс системы равна . В системе центра масс первый шар движется со скоростью  , а второй шар движется навстречу первому со скоростью . После удара шары будут разлетаться с такими же скоростями. Осталось вернуться в первоначальную систему отсчета. Применяя закон сложения скоростей, находим, что конечная скорость шара массой m равна и направлена назад, а скорость покоившегося раньше шара массой 2m равна и направлена вперед.
, а второй шар движется навстречу первому со скоростью . После удара шары будут разлетаться с такими же скоростями. Осталось вернуться в первоначальную систему отсчета. Применяя закон сложения скоростей, находим, что конечная скорость шара массой m равна и направлена назад, а скорость покоившегося раньше шара массой 2m равна и направлена вперед.
Отметим, что в системе центра масс очевидным является утверждение, что при ударе относительная скорость шаров не меняется по величине, но меняется по направлению. А так как разность скоростей при переходе в другую инерциальную систему отсчета не изменяется, можно считать, что мы вывели это важное соотношение и для первоначальной системы отсчета:
υ1 – υ2 = u1 – u2,
где буква υ используется для обозначения начальных скоростей, а u — для конечных. Это уравнение можно решать совместно с законом сохранения импульса вместо закона сохранения энергии (куда скорости входят во второй степени).
Задача 7. Известно, что при упругом нецентральном ударе двух одинаковых шаров, один из которых до удара покоился, угол разлета равен 90°. Докажите это утверждение.
В системе центра масс нецентральный удар можно описать следующим образом. До удара шары сближаются с одинаковыми импульсами, после удара они разлетаются с такими же по величине, но противоположно направленными импульсами, а прямая разлета поворачивается на некоторый угол относительно прямой сближения. Чтобы перейти обратно в начальную систему отсчета, надо каждую конечную скорость сложить (векторно!) со скоростью центра масс. В случае одинаковых шаров скорость центра масс равна  , где υ — скорость налетающего шара, и в системе отсчета центра масс шары сближаются и разлетаются с одинаковыми скоростями . В том, что после сложения каждой конечной скорости со скоростью центра масс получаются взаимно перпендикулярные векторы, можно убедиться из рисунка 9. А можно и просто проверить, что скалярное произведение векторов
, где υ — скорость налетающего шара, и в системе отсчета центра масс шары сближаются и разлетаются с одинаковыми скоростями . В том, что после сложения каждой конечной скорости со скоростью центра масс получаются взаимно перпендикулярные векторы, можно убедиться из рисунка 9. А можно и просто проверить, что скалярное произведение векторов  и
и  обращается в ноль в силу того, что модули векторов
обращается в ноль в силу того, что модули векторов  равны друг другу.
равны друг другу.

Рис. 9
Упражнения
1. Стержень массой m и длиной l шарнирно закреплен за один из концов. Стержень отклонили на некоторый угол от вертикального положения и отпустили. В момент прохождения вертикального положения скорость нижней точки равна υ. Найдите натяжение в средней точке стержня в этот момент времени.
2. Стержень массой m и длиной l вращают в горизонтальной плоскости с угловой скоростью ω вокруг одного из его концов. Найдите зависимость натяжения стержня от расстояния x до оси вращения, если на другом конце закреплен маленький грузик массой М.
3. Найдите период колебаний для системы, описанной в задаче 5 статьи, но для брусков различных масс m1 и m2.
4. Выведите известные общие формулы для упругого центрального удара двух шаров, используя переход в систему отсчета центра масс.
5. Шар массой m1 налетает на покоящийся шар меньшей массы m2. Найдите максимально возможный угол отклонения налетающего шара при упругом нецентральном ударе.
Ответы
1. 
2. 
3. 
5.