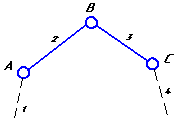
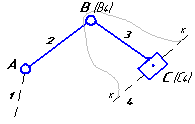
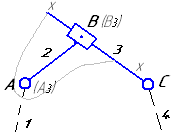
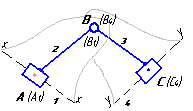
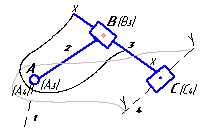
Рассмотрим порядок построения планов скоростей и ускорений точек звеньев на примере кинематического исследования плоского рычажного механизма (рисунок 1).
Планом скоростей (ускорений) механизма называют чертеж, на котором скорости (ускорения) различных точек изображены в виде векторов, показывающих направления и величины (в масштабе) этих скоростей (ускорений) в данный момент времени.
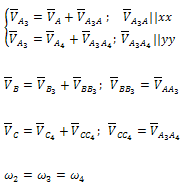
Абсолютное движение любой точки звена может быть составлено из переносного и относительного. За переносное принимается известное движение какой-либо точки. Относительное – движение данной точки относительно той, движение которой принято за переносное:

На плане абсолютные скорости (ускорения) изображаются векторами, выходящими из полюса плана.
На конце вектора абсолютной скорости (ускорения) ставится строчная (маленькая) буква, соответствующая той точке механизма, скорость (ускорение) которой данный вектор изображает. Отрезок, соединяющий концы векторов абсолютных скоростей, представляет собой вектор относительной скорости соответствующих точек.
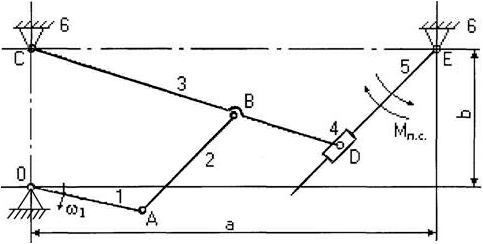
Рисунок 1 – Кинематическая схема плоского рычажного механизма
Другие примеры решений >
Помощь с решением задач >
Рассмотрим построение планов для механизма, представленного на рисунке 1. Вначале рассматривается начальный механизм, а далее решение ведется по группам Ассура в порядке их присоединения.
Начальный механизм:

Здесь
По вычисленному значению VA выбираем масштаб плана скоростей KV и из произвольного полюса откладываем отрезок va изображающий эту скорость:
Можно также назначать отрезок va а масштаб KV вычислять:
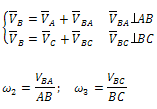
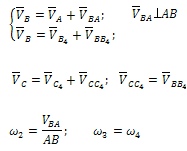
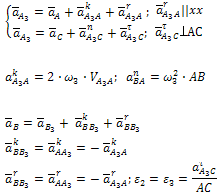
Группа Ассура второго класса 1-го вида (звенья 2, 3):
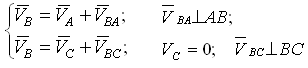
Истинные значения (в м/с) относительных скоростей VBA и VBC определяются после построения плана умножением соответствующих отрезков (в мм) на масштаб плана:
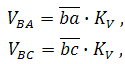
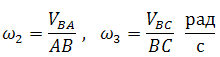
а зная их, можно определить и угловые скорости звеньев 2 и 3:
Скорость точки D на плане скоростей можно определить по подобию. (Если известны скорости двух точек одного и того же звена, то скорость любой третьей точки этого же звена можно определить, построив на плане скоростей фигуру, подобную фигуре, образованной этими же буквами на звене механизма). Точки С, В , D на звене 3 лежат на одной прямой. На плане строим отрезок сd, соблюдая условие подобия:

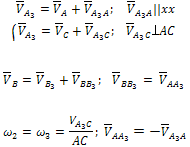
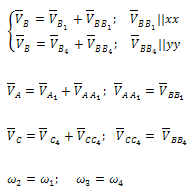
Группа Ассура второго класса 3-го вида (звенья 4,5) :
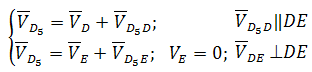
где D5 — точка, находящаяся на звене 5 под точкой D. После определения скорости движения точки D5 относительно точки E можно вычислить угловую скорость звеньев 4 и 5 (ω4=ω5, т. к. эти звенья соединяются поступательной парой):
Примечание: в данном случае размер DE является величиной переменной (т.е. в задании он отсутствует), поэтому в каждом положении механизма он определяется через отрезок на чертеже и масштаб длин.
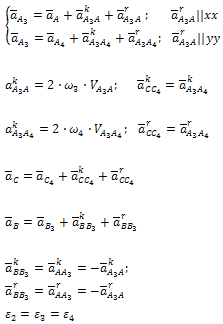
План ускорений строится в таком же порядке.
Начальный механизм
Ускорение точки A состоит только из нормальной составляющей, т.к. задана постоянная угловая скорость первого звена (ω1=соnst):

По вычисленному значению ускорения точки A выбирается масштаб плана ускорений и определяется отрезок на плане, соответствующий этому ускорению (или вычисляется масштаб плана ускорений по выбранному отрезку, изображающему ускорение точки A):
Здесь точка w – полюс плана ускорений.
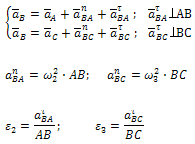
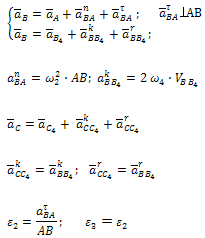
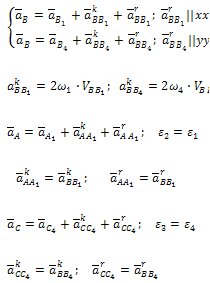
Группа Ассура (звенья 2,3) второго класса 1-го вида:

После построения определяются aτBA и aτBC, по которым можно вычислить угловые ускорения звеньев 2 и 3:

Ускорение точки D определяем по подобию так же, как определяли скорость этой точки:

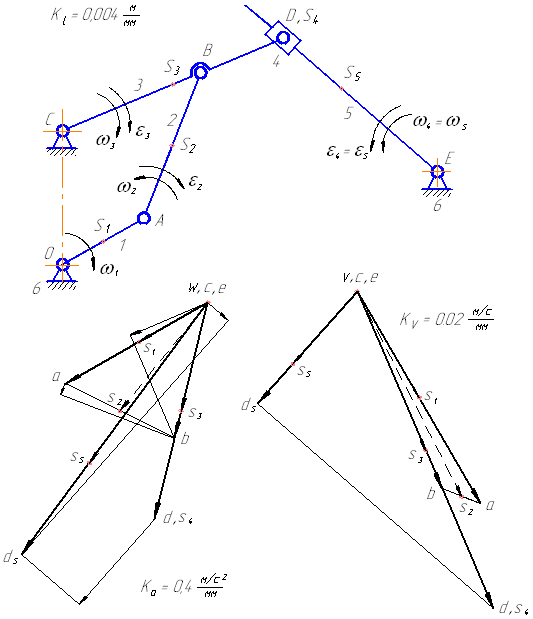
Рисунок 5 – Планы скоростей и ускорений для заданного положения механизма
Группа Ассура (звенья 4,5) второго класса 3-го вида:

Для определения направления akD5D надо вектор VD5D повернуть на 90° в направлении ω5. Угловые ускорения:
При силовом расчете необходимо иметь ускорения центров масс (asi), которые на плане ускорений определяются методом подобия.
Планы скоростей и ускорений для первого положения заданного механизма приведены на рисунке 5.
Уравнение планов скоростей и ускорений для каждой группы Ассура приведены в таблице 1.
Таблица 1 – Кинематический анализ групп Ассура II класса методом планов
| Вид группы |
Конфигурация |
Уравнения для построения планов скоростей и для определения угловых скоростей | Уравнения для построения планов ускорений и для определения угловых ускорений |
|
1 |
|
|
|
| 2 |
|
|
|
| 3 |
|
|
|
| 4 |
|
|
|
| 5 |
|
|
|
Пример расчета механизма с поступательно движущимся выходным звеном >
Курсовой проект по ТММ >
Лекция № 5
Определение скоростей и ускорений точек механизма методом планов
Наиболее
распространенным методом исследования
является графо-аналитический метод –
метод планов скоростей и ускорений.
Планом скоростей
(ускорений) называют рисунок на котором
в масштабе изображены векторы, равные
по модулю и направлению скоростям
(ускорениям) различных точек звеньев
механизма в данный момент времени.
План скоростей
(ускорений) построенный для исследуемого
положения механизма, это совокупность
нескольких планов скоростей (ускорений)
отдельных точек звеньев, у которых
полюса планов являются общей точкой-полюсом
плана скоростей (ускорений) механизма.
Планы скоростей
(ускорений) механизма могут строиться
как для каждого положения отдельно, так
и быть совмещенными.
Из теоретической
механики известно, что любое движение
точки звена может быть составлено из
переносного движения известной точки
и относительного движения, искомой
точки относительно известной
![]()
Движение звена
относительно основной системы отсчета
называется абсолютным движением.
Движение звена относительно подвижной
системы отсчета называется относительным
движением. Движение подвижной системы
отсчета относительно основной называется
переносным.
При сложном движении
тела абсолютная(ое) скорость
![]() (ускорение
(ускорение![]() )
)
точки равна векторной сумме переносной(го)![]() (
(![]() )
)
и относительной (го)![]() скоростей (ускорений) этой точки, т.е.
скоростей (ускорений) этой точки, т.е.
![]() (5.1)
(5.1)
![]() (5.2)
(5.2)
где
![]() и
и![]() –
–
соответственно нормальное ускорение
в относительном движении, направленное
по радиусу вращения точки к центру
кривизны траектории (центру вращения)
и касательное ускорение, направленное
перпендикулярно радиусу вращения.
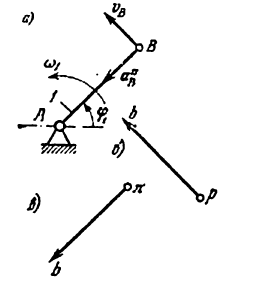
Планы скоростей и ускорений начального звена
Если начальное
звено механизма совершает вращательное
движение, то скорость его любой точки
например В,
определится: если задана частота вращения
n,
то
![]()
![]() ,
,![]()
тогда:
![]()
где
![]() –
–
скорость точкиВ,
lАВ
– кратчайшее расстояние от оси вращения
до точки В,
![]() –
–
угловая скорость звена АВ. Скорость
точкиВ
![]() перпендикулярна
перпендикулярна
прямой АВ, (![]() ),
),
может быть изображена на плане скоростей
(на рис.5.1 б) как вектор![]() ,
,
модуль которого будет:
«рв»
=
![]() ,
,
где
![]() – масштабный коэффициент скоростей.
– масштабный коэффициент скоростей.
«р»
– полюс плана скоростей; «в»
– одноименная точка на звене.
Аналогичным образом
могут быть построены скорости любых
других точек, принадлежавших этому
звену.


 а)
а)
б)
в)
Рис. Скорости
точки, ускорения и ее планы
б) – план скоростей для точки В
начального звена
в) – план ускорений для точкиВначального звена АВ.
На плане ускорений
– вектор ускорений точки В –![]() и ее составляющие:
и ее составляющие:
![]() –
–
нормальное и
![]() –
–
касательное.
![]() ;
;
![]() II
II
АВ;
![]() (
(![]() масштабный
масштабный
коэффициент)
![]() ;
;
![]() (
(![]() -угловая
-угловая
скорость звена)
ускорение
![]()
Ускорение других
точек начинающего звена находятся и
строятся аналогичным образом.
Определение скоростей и ускорений групп II класса методом планов
-
Рассмотрим группу
II
класса первого вида
 Кинемат. схема II
Кинемат. схема II
класс 1 вид

План скоростей II
класс 1 вид
ДАНО:![]() векторы
векторы
абсолютных скоростей точекB,
D.
![]() векторы
векторы
скоростей точки С
относительно точек В и D.
Известны векторы
скоростей точек В и D
концевых элементов группы, которыми
звенья 2 и 3 (присоединяются), входят в
кинематические пары со звеньями 1 и 4
основного механизма, т.е. скорости
![]() и
и![]() .
.
Требуется определить
вектор
![]() скорости т. С.
скорости т. С.
Движение т. С может
быть разложено на переносно-поступательное
со скоростью точки В или точки D
и относительно-вращательное вокруг
точки В или точки D.
Тогда векторные уравнения для скорости
![]() точки С будут иметь вид:
точки С будут иметь вид:
![]() решая
решая
совместно уравнения получаем
![]() (5.3)
(5.3)
Чтобы построить
план скоростей, выбираем
![]()
![]() ,
,
Масштаб
![]() ;
;![]()
Выбираем в качестве
полюса плана скоростей точку «р»,
где
![]() ,
,
откладываем по направлению![]() и векторрв
и векторрв![]() как
как
и
![]() от
от
нее отрезки(рв)
и (рd),
представляющие собой скорости точек
![]() и
и![]() .
.
Проведем через т.«в»
и «d»
прямые, имеющие направление векторов
относительных скоростей
![]() и
и![]() . Пересечение прямых даст т.«с».
. Пересечение прямых даст т.«с».
Точка «с»
определит конец вектора
![]() согласно (5.3) выражается отрезком(рс),
согласно (5.3) выражается отрезком(рс),
соединяющим т. «р»
с полученной точкой «с».
Величина этой
скорости будет равна
![]()
Отрезки (вс)
и (dс)
представляют собой относительные
скорости
![]() и
и![]() в том же масштабе, т.е.
в том же масштабе, т.е.
![]()
Треугольники
рвс
и рdc
– называются
планами
скоростей звеньев
№ 2 и № 3, Фигура рвсdр
– называется
планом скоростей группы ВСD,
точка «р»
– плана
называется полюсом плана скоростей.
Пользуясь планом
скоростей можно определить угловые
скорости
![]() и
и![]() звеньев № 2 и № 3. Если группа ВСD
звеньев № 2 и № 3. Если группа ВСD
выполнена в произвольном масштабе
![]() то
то![]()
![]() ,
,
![]() .
.
Для определения
скорости какой либо точки Е, лежащей на
оси звена ВС имеем векторное уравнение
![]()
Согласно этому
уравнению из т. «в»
плана скоростей проводим направление
вектора
![]() относительной скорости точки. Е вокруг
относительной скорости точки. Е вокруг
точки. В. т.к. относительные скорости
любых точек, лежащих на оси ВС звена 2,![]() ВС, то направление
ВС, то направление
![]() совпадает с
совпадает с
направлением вектора скорости
![]() ,
,
т.е. отрезок плана скоростей(ве),
определяющий скорость
![]() совпадает по направлению с отрезком(вс).
совпадает по направлению с отрезком(вс).
Величина отрезка определяется:
![]() (1),
(1),
и
![]() (2)
(2)
разделив уравнение
(2) на уравнение (1) получаем:
![]()
т.е. скорости
точек Е и С относительно т. «В» прямо
пропорциональны расстояниям этих точек
до т. В.
Для определения
скорости какой либо произвольной точки
F
на звене №3: также составляем уравнения:

Векторы
![]() и
и![]() скоростей т.D
скоростей т.D
и C
нам известны по величине и по направлению,
а векторы
![]() и
и![]() известны только по направлению. Вектор
известны только по направлению. Вектор![]() отрезкуFD,
отрезкуFD,
а вектор
![]() .
.
Из т.d-плана
скоростей проводим прямую
![]() FD,
FD,
а через т. «с»-
прямую
![]() FC,
FC,
точка пересечения «f»
определяет конец вектора
![]() полной скорости т. «F»,
полной скорости т. «F»,
отрезок «рf».
![]() .
.
Для удобства
графического построения плана скоростей
всех звеньев группы, иногда план условно
повертывают в одном и том же направлении
на угол
![]() .
.
Тогда векторы относительно скоростей![]() и
и![]() будутII
будутII
ВС и DC.
Рассматривая
![]() плана скоростей и
плана скоростей и![]() CFD
CFD
на звене, можно видеть, что отрезки сf,
fd,dc
на плане скоростей соответственно
![]() к
к
отрезкам (CF),
(FD),(DC)
на схеме
т.е.
![]() на
на
плане скоростей изображающий относительные
скорости![]() группы на ее схеме и повернуты относительно
группы на ее схеме и повернуты относительно
его на угол, в![]() .
.
Это свойство подобия фигуры относительных
скоростей на плане скоростей фигуре
звена на схеме механизма позволяет
определять скорости любых точек этого
звена не из уравнений, а графически,
построением подобных фигур.
Для проверки
правильности графического построения
подобных фигур на схеме и на плане
скоростей: При обходе контура звена по
часовой стрелке на схеме например CDF,
должно совпадать в том же порядке на
плане скоростей: cdf
При определении
ускорений группы II
класса первого вида, известны векторы
![]() и
и![]() полных ускорений точек В иD.
полных ускорений точек В иD.
Для определения ускорения ас
точки «С»,
как и для определения скорости
![]() ,точки
,точки
«С»,
рассматриваем ее движение как сложное,
состоящее из переносного со скоростями
и ускорениями т. В и D
и относительного
вращательного вокруг этих точек. Тогда
векторные уравнения для определения
ускорения точки С
![]() ,
,
![]() (5.5)
(5.5)
где
![]() и
и![]() нормальные
нормальные
ускорения в относительном движении
![]() и
и![]() –
–
тангенциальные ускорения
Решая совместно
уравнения получаем
![]() (5.6)
(5.6)
![]() и
и
![]() – известны
– известны
Масштаб: 1мм –
![]() (м/с2)
(м/с2)
Кинемат. схема II
класс 1 вид

План ускорений II
класс 1 вид
План скоростей
предполагается построенным, т.е. известны
скорости всех звеньев, тогда. Векторы
нормальных ускорений
![]() ,
,![]() в относительном движении может быть
в относительном движении может быть
определены:
![]() ;
;
![]()
Скорости
![]() и
и![]() и угловые скорости
и угловые скорости![]() и
и![]() могут быть определены по построенному
могут быть определены по построенному
плану скоростей, длиныl2
и l3
звеньев 2 и 3 определяют по схеме подставляя
в полученные равенства длины из плана
скоростей в масштабе
![]() и со схемы
и со схемы![]() ,
,
получаем
![]() ;
;
![]() (5.7)
(5.7)
где отрезки (вс)
и (dc)
взяты из плана скоростей.
В качестве полюса
плана выбираем точку «![]() »
»
и откладываем отрезки (![]() )
)
и (![]() )-
)-
в масштабе![]() ускорений
ускорений
точек В иD.
Далее по уравнениям (5.7) вычисляем
величины ускорений
![]() и
и![]() и откладываем из точкив
и откладываем из точкив
и d
отрезки вn2
и dn3,
и представляющие в масштабе эти ускорения.
Из полученных точек n2
и n3
проводим прямые в направлении векторов
тангенциальных ускорений
![]() ,
,![]() перпендикулярно ВС и СD.
перпендикулярно ВС и СD.
Точка пересечения этих прямых и даст
конец вектора
![]() полного ускорения точки С, т.е.
полного ускорения точки С, т.е.![]() .
.
Построенные фигуры![]() и
и![]() носят
носят
название планов ускорений звеньев 2 и
3, а вся фигура![]() –
–
называется планом ускорений группыBCD.
Точка
![]() –
–
называется началом или полюсом плана
ускорений.
Соединив точки
«в»
и «d»
плана с точкой «С»,
получим векторы полных относительных
ускорений
![]() и
и![]() .
.
Имеем:
![]() =
=![]() ;
;
![]()
Модули угловых
ускорений:
![]() ;
;![]() (5.8)
(5.8)
звеньев ВС и CD
Подставляя
соответствующие отрезки взятые из
ускорений в равенство, получаем
![]() ;
;
![]()
![]()
![]()
Для определения
ускорения какой-либо точки Е, лежащей
на оси звена ВС воспользуемся уравнением:
![]()
Как известно из
теоремы механики при вращательном,
плоском движении звена около некоторой
точки, ускорения всех точек звена
пропорциональны радиусом-вектором,
соединяющим исследуемые точки центром
вращения, направления этих ускорений
образуют с этими радиусами постоянный
угол
![]() , определяемый из уравненияtg
, определяемый из уравненияtg![]() =
=![]() ,
,
где
![]() -есть
-есть
угловое ускорение звена, а![]() –
–
угловая скорость звена.
Т.к. относительное
движение звена 2 около точки В есть
движение вращательное, то, очевидно,
что относительные ускорения всех точек
звена 2 будут образовывать с радиусами-
векторами, выходящими из точки В,
постоянный угол
![]() , удовлетворяющий соотношению
, удовлетворяющий соотношению
![]() ,
,
следовательно, направление вектора
![]() должно
должно
совпадать на плане ускорений с направлением
вектора![]() ,
,
т.е. с направлением отрезка (вс),
величина же отрезка (вl)
изображающего на плане ускорений
ускорение
![]() ,
,
определяется из условия пропорциональности
ускорений радиусом-вектором, т.е.
![]() ;
;
![]()
![]()
Для определения
ускорения точки F
жестко связанной со звеном 3, можно токже
воспользоваться правилом подобия. Для
этого строим на отрезке (сd)
плана ускорений
![]() ,
,
повернутый относительно![]() на постоянный угол
на постоянный угол![]() ,
,
определяемый по формуле:![]() .
.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Здравствуйте на этой странице я собрала теорию и практику с примерами решения задач по предмету теория машин и механизмов с решением по каждой теме, чтобы вы смогли освежить знания!
Если что-то непонятно — вы всегда можете написать мне в WhatsApp и я вам помогу!

Теория механизмов и машин
Теория механизмов и машин (ТММ) является одним из разделов механики, в котором изучается строение, кинематика и динамика механизмов и машин в связи с их анализом и синтезом.
Механизмом называется система материальных тел, предназначенных для преобразования движения одного или нескольких тел в требуемые движения остальных.
Состав механизмов – разнообразен и включает механические, гидравлические, электрические и др. устройства.
Несмотря на разницу в назначении механизмов их строение, кинематика и динамика имеет много общего, поэтому исследование механизмов проводится на базе основных принципов современной механики. Всякий механизм состоит из отдельных тел (деталей), соединенных между собой.
Структура механизмов. Основные определения
Механизмом называется искусственно созданная система тел, предназначенная для преобразования движения одного нлн нескольких тел в требуемые движения других тел.
Одно или несколько жестко соединенных твердых тел, входящих в состав механизма, называется звеном. Звено, принимаемое за неподвижное, называется стойкой. Звенья механизма, положения которых назначаются непосредственно значением выбранных независимых параметров — обобщенных координат, называются ведущими, а звенья механизма, положения и перемещения которых однозначно зависят от положений и перемещений ведущих звеньев, называются ведомыми.
Возможно эта страница вам будет полезна:
Кинематической парой называется соединение двух соприкасающихся звеньев, допускающее их относительное движение. Поверхности, линии, точки звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару, называются элементами кинематической пары.
Кинематической цепью называется связанная система звеньев, образующих между собою кинематические пары. Кинематические цепи подразделяются на простые и сложные, замкнутые и незамкнутые.
Простой кинематической цепью называется цепь, у которой каждое звено входит не более чем в две кинематические пары.
Сложной кинематической цепью называется цепь, у которой имеется хотя бы одно звено, входящее более чем в две кинематические пары.
Замкнутой кинематической цепью называется цепь, каждое звено которой входит по крайней мере в две кинематические пары.
Незамкнутой кинематической цепью называется цепь, у которой есть звенья, входящие только в одну кинематическую пару.
Подавляющее большинство механизмов, применяющихся в инженерной практике, образованы замкнутыми кинематическими цепями. Поэтому механизм (состоящий только из твердых тел) может быть определен также следующим образом.
Механизмом называется кинематическая цепь, в которой при заданном движении одного или нескольких звеньев (ведущих) относительно любого из них (стойки) все остальные звенья (ведомые) совершают однозначно определяемые движения.
Число степеней свободы механизма относительно стоики назыоают степенью подвижности и обычно обозначают буквой  . Большинство механизмов, используемых в технике, имеют степень подвижности, равную единице, по иногда встречаются механизмы с двумя и более степенями подвижности; такие механизмы называются дифференциальными.
. Большинство механизмов, используемых в технике, имеют степень подвижности, равную единице, по иногда встречаются механизмы с двумя и более степенями подвижности; такие механизмы называются дифференциальными.
В сборнике принята классификация кинематических пар по Артоболевскому. Все кинематические пары разделяются на пять классов. Номер класса кинематической пары определяется числом условий связи, которые наложены на движение одного звена пары относительно другого. Отсюда следует, что пара 1 класса может быть названа пяпиподвижной, пара II класса — четырёхподвижной и т. д.
Для решения вопроса, к какому классу относится та или иная кинематическая пара, следует поступать так. Одно из звеньев, входящих в кинематическую пару, представить неподвижным. Связать с ним систему координат  и, ориентируясь но ней, проследить, какие движения другого звена пары невозможны из шести движений, которые оно имело бы возможность совершать, не входя в пару. Число этих невозможных движений (как равное числу связей в паре) представит собою номер класса пары.
и, ориентируясь но ней, проследить, какие движения другого звена пары невозможны из шести движений, которые оно имело бы возможность совершать, не входя в пару. Число этих невозможных движений (как равное числу связей в паре) представит собою номер класса пары.
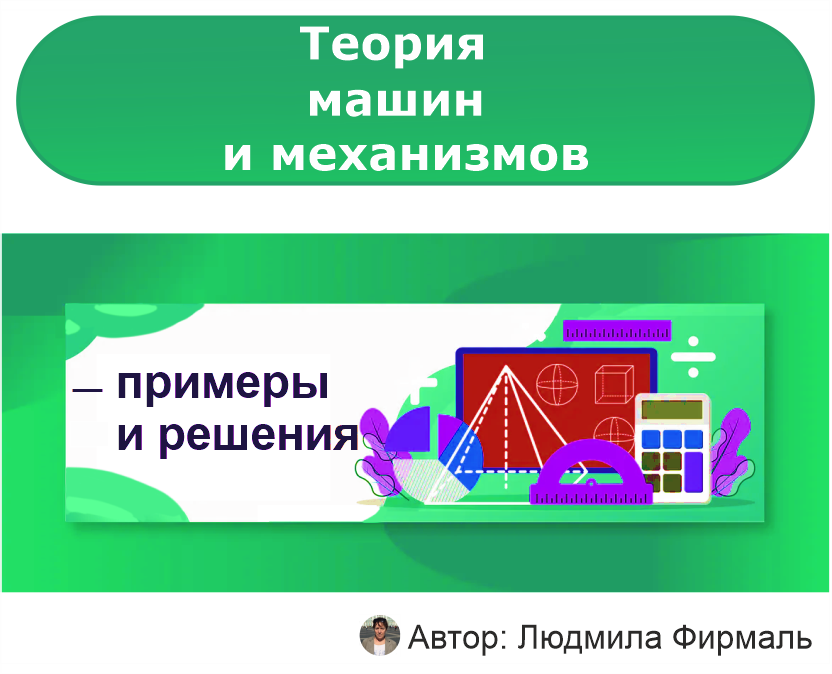
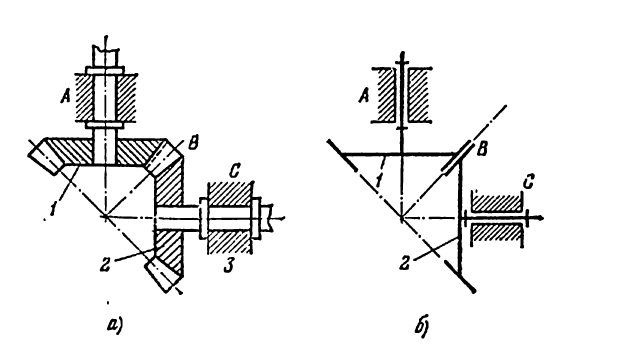
На рис. 1 изображена низшая (сферическая) кинематическая пара. Элементом кинематической пары на первом звене является сферическая поверхность радиуса R,
а на звене 2 — сферическая поверхность того же радиуса R, охватывающая сферическую поверхность на звене 1. Проведя через центр О сферы прямоугольную систему координат Oxyz связанную со звеном 1, замечаем, что звено 2 не может перемещаться поступательно вдоль осей Ох, Оу и Oz, но может свободно вращаться вокруг этих же осей. Следовательно, эту кинематическую пару надо отнести к третьему классу (невозможны три из шести движений).
Рассмотрим еще один пример. Пусть (рис. 1) на движение звеньев, входящих в сферическую пару, наложено условие, что они совершают плоскопараллельное движение относительно плоскости Oyz. В данном случае, помимо ранее наложенных связей, появились еще две общие связи — невозможность вращения вокруг осей Оу и Oz. Эту кинематическую пару надо отнести к пятому классу.
Классификация механизмов
1. Все механизмы можно разделить на плоские и пространственные. У плоского механизма точки его звеньев описывают траектории, лежащие в параллельных плоскостях. У пространственного механизма точки его звеньев описывают плоские траектории или траектории, лежащие и пересекающихся плоскостях.
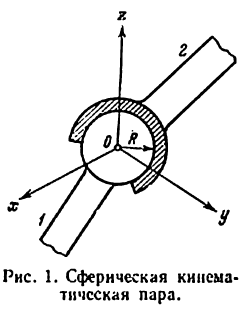
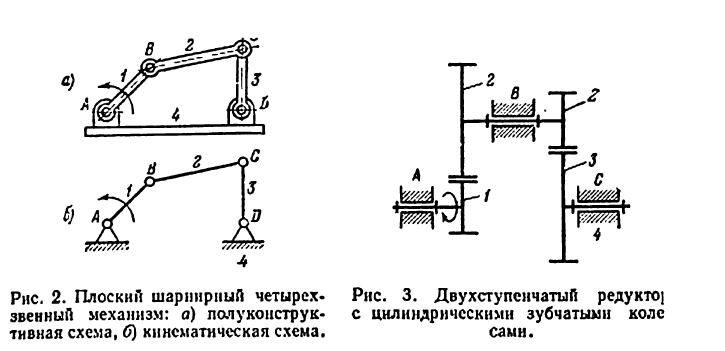
На (рис. 2 )изображен плоский шарнирный четырехзвенный механизм, а на( рис. 3 )— плоский механизм двухступенчатого редуктора. На (рис. 4) показан пространственный механизм. На (рис. 5) изображена пространственная зубчатая передача, образованная коническими колесами.
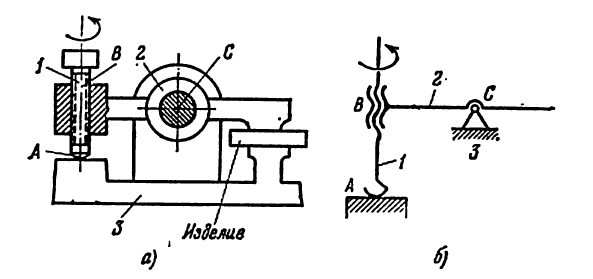
(Рис, 4.) Пространственный механизм зажима: а) полуконструктивная схема, б) кинематическая схема.
(Рис. 5.) Зубчатая передача с коническими колесами: а) полукоиструктнвная схема, б) кинематическая схема.
2. Механизмы различаются еще по семействам, которых существует пять — от нулевого до четвертого.
Номер семейства равен числу общих условий связи, которые наложены на все звенья механизма. Поэтому, например, плоские механизмы следует отнести к третьему семейству.
3. Число степеней подвижности замкнутой кинематической цепи с одним неподвижным звеном можно найти, воспользовавшись структурными формулами, которые для механизмов различных семейств имеют следующий вид: для механизмов нулевого семейства (формула Сомова— Малышева):



для механизмов первого семейства




механизмов второго семейства:




для механизмов третьего семейства — плоских и сферических (формула Чебышева)

для механизмов четвертого семейства (формула Добровольского)

В этих формулах и» —степень подвижности механизма, л —число подвижных звеньев, 
 , — число кинематических пар соответствующих классов.
, — число кинематических пар соответствующих классов.
Так, например,  —число кинематических пар V класса,
—число кинематических пар V класса,  — число кинематических пар IV класса и т. д.
— число кинематических пар IV класса и т. д.
Прежде чем применять структурные формулы, следует установить, сколько общих условий связи наложено на движение звеньев исследуемого механизма. Число этих связей будет соответствовать номеру семейства.
После установления номера семейства следует выяснить, нет ли в данном механизме звеньев, которые накладывают пассивные связи или вносят лишние степени свободы, не влияющие на кинематику основных звеньев механизма.
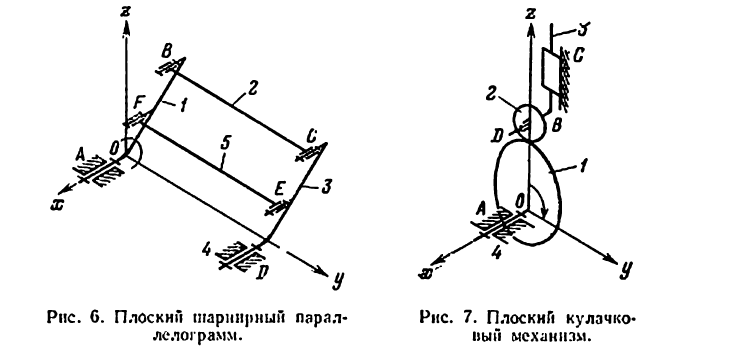
Па (рис. 6 и 7 )показаны два механизма, которые надо отнести к плоским, так как на движения их звеньев наложены по три общих условия связи: звенья не могут перемешаться поступательно вдоль оси Ох и вращаться вокруг осей Оу и Оz. Следовательно, оба эти механизма принадлежат к третьему семейству.
В механизме на (рис. 6) длины звеньев (расстояния между осями шарниров) подобраны так, что изменяемая фигура  всегда будет параллелограммом
всегда будет параллелограммом 


 Вследствие того, что
Вследствие того, что  и
и  звено 5 не стесняет движения остальных звеньев. Поэтому оно должно быть отнесено к пассивной связи и не учитывается при подсчете числа подвижных звеньев n. При отброшенном звене 5 степень подвижности механизма по формуле (2.4) равна
звено 5 не стесняет движения остальных звеньев. Поэтому оно должно быть отнесено к пассивной связи и не учитывается при подсчете числа подвижных звеньев n. При отброшенном звене 5 степень подвижности механизма по формуле (2.4) равна

Это означает, что для придания определенности движения звеньям механизма достаточно задать движение одному звену.
Если бы не была отброшена пассивная связь (звено 5 и кинематические пары пятого класса F и Е), то при подсчете степени подвижности был бы получен неверный результат, так как в этом случае степень подвижности была бы равна

т. е. вместо механизма должна бы быть жесткая неизменяемая система, являющаяся формой.
На (рис. 7) представлен плоский кулачковый механизм, у которого на конце толкателя 3 имеется круглый ролик 2,»поворачивающийся вокруг своей осн. Если ролик жестко связать с толкателем, то от этого закон движения толкателя, очевидно, не изменится. Круглый ролик, свободно поворачивающийся вокруг своей оси, вносит в механизм лишнюю степень свободы, и при подсчете степени подвижности механизма это вращательное движение приниматься во внимание не должно. Считая, что ролик жестко связан с толкателем, подсчитываем степень подвижности механизма по формуле (2.4):

Формальный же подсчет привел бы нас к такому результату:

Составление кинематических схем механизмов
1. Кинематическая схема механизма дает полное представление о структуре механизма и определяет его кинематические свойства. Она является графическим изображением механизма посредством условных обозначений звеньев и кинематических пар с указанием размеров, которые необходимы для кинематического анализа механизма.
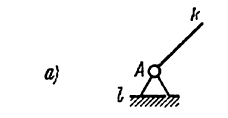
На кинематических схемах механизмов звенья, как правило, изображаются отрезками прямых и нумеруются арабскими цифрами. Кинематические пары в пространственных механизмах обозначаются большими буквами латинского
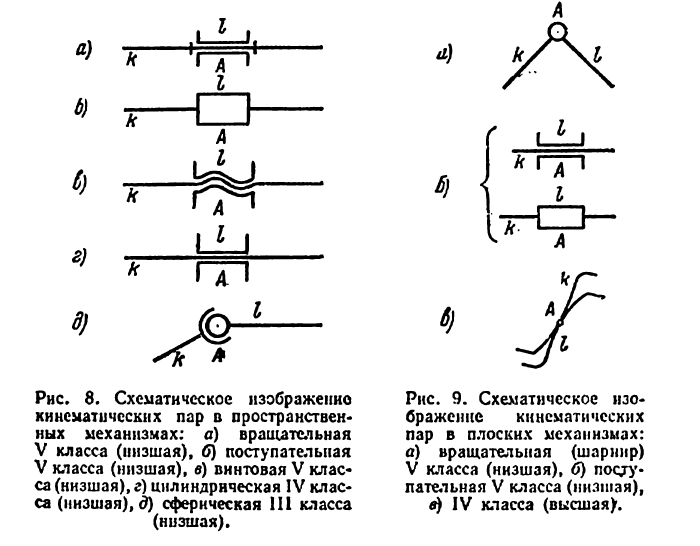
алфавита и схематически изображаются так, как это сделано на (рис. 8.) Схематическое изображение кинематических пар плоских механизмов показано на (рис. 9). Элементы высшей пары очерчиваются кривыми, которыми они характеризуются в натуре. Стойку (неподвижное звено) принято выделять штриховкой (рис. 10).
2. Для построения кинематической схемы механизма рекомендуется следующая последовательность действий.
- Установить основное кинематическое назиачепие механизма. Например, механизм на( рис. 7) предназначен для преобразования вращательного движения кулачка 1 в поступательное движение толкателя 3.
- Подсчитать общее число звеньев k, включая стойку. Число n подвижных звеньев будет равно

- Выяснить, сколько наложено на подвижные звенья механизма общих условий связи, и по их числу установить номер семейства механизма.
- Подсчитать и установить класс кинематических пар, а также найти степень подвижности механизма.
- Вычертить схему механизма. Начинать ее надо с нанесения на чертеж неподвижных элементов кинематических пар, т. е. элементов, принадлежащих стойке. Далее следует вычертить ведущие звенья, входящие в кинематические пары со стойкой. (Число этих звеньев соответствует найденной ранее степени подвижности.) Затем надо нанести на чертеж кинематическую цепь, образующую ведомую часть механизма
При составлении схемы плоских механизмов чертеж должен совпадать с плоскостью, параллельно которой движутся точки звеньев механизма. Исключение составляют передачи
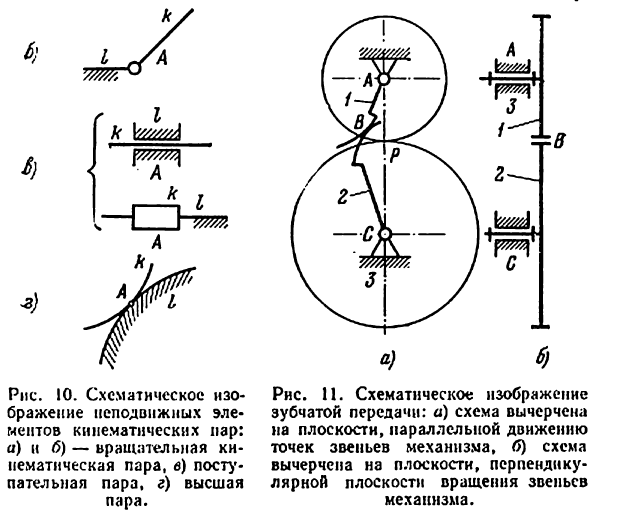
с цилиндрическими зубчатыми колесами, когда для наглядности схема вычерчивается в плоскости, перпендикулярной плоскости вращения колес. На (рис. 11, а)показана схема зубчатой передачи, вычерченная по общим правилам для схем плоских механизмов, а на(рис. 11, б) — та же передача, вычерченная по правилам для схем передач с цилиндрическими зубчатыми колесами.
Классификация плоских механизмов
1. В сборнике принята классификация плоских механизмов Ассура — Артоболепского.
К механизмам, отнесенным по этой классификации к одному и тому же классу, применяется методика кинематического и силового анализа, специально разработанная для этого класса.
Согласно идеям Л. В. Ассура, любой механизм образуется последовательным присоединением к механической системе с определенным движением (ведущим звеньям и стойке) кинематических цепей, удовлетворяющих условию, что степень их подвижности равна нулю. Такие цепи, если они имеют только низшие кинематические пары, называются группами Ассура (структурным группами). Следует иметь в виду, что от группы Ассура не может быть отделена кинематическая цепь, удовлетворяющая условию = 0, без разрушения самой группы. Цели такое отделение возможно, то исследуемая кинематическая цепь представляет собой совокупность нескольких групп Ассура.
Группы Ассура подразделяются на классы в зависимости от их строения. Класс же механизма определяется наивысшим классом группы Ассура, образовавшей его ведомую часть.
Определить класс плоского механизма по Ассуру — Артоболевскому можно только тогда, когда предварительно выявлена структура механизма, определена
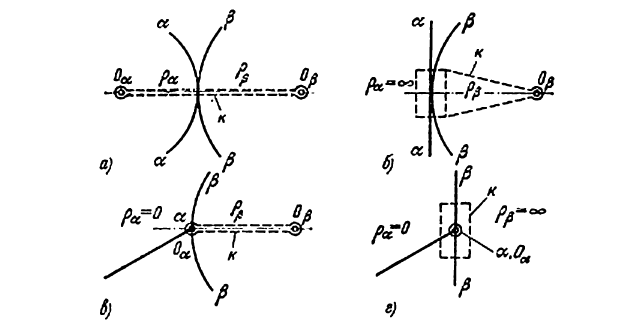
Рис. 12. Замена кинематической пары IV класса одним звеном, входящим в две кинематические пары V класса: а) элементы кинематической пары — две кривые линии  и
и б) элементы кинематической пары — прямая и кривая линии, в) элементы кинематической пары — точка
б) элементы кинематической пары — прямая и кривая линии, в) элементы кинематической пары — точка  и кривая линия , г) элементы кинематической пары — точка и прямая линия
и кривая линия , г) элементы кинематической пары — точка и прямая линия 
 — центры кривизны элементов кинематической пары IV класса,
— центры кривизны элементов кинематической пары IV класса,  — радиусы кривизны этих элементов,
— радиусы кривизны этих элементов,  —номер заменяющего звена.
—номер заменяющего звена.
Его степень подвижности, число ведущих звеньев, входящих в кинематические пары V класса со стойкой, и когда все кинематические пары в механизме являются только парами V класса. Если же исследуемый механизм имеет кинематические пары IV класса, то они предварительно должны быть заменены одним звеном, входящим в две кинематические пары V класса. Получившийся после такой замены механизм называется заменяющим. Такая замена для двух смежных бесконечно малых перемещений не меняет значений перемещений, скоростей и ускорений основного механизма.
На (рис. 12) показан способ замены кинематической пары IV класса (высшей) одним звеном, входящим в две пары V класса.
2. Ведущее звено, входящее в кинематическую пару V класса со стойкой, образует механизм первого класса. Иногда в литературе это же звено называется начальным, а совместно со стойкой — начальным механизмом.
3. Степень подвижности группы Ассура будет

где  — число звеньев в группе,
— число звеньев в группе,  — число кинематических пар V класса
— число кинематических пар V класса
Из условия (4.1) получим, что  равно
равно

Так как число кинематических пар V класса  и число звеньев
и число звеньев  должны быть целымн числами, то, следовательно, число звеньев в группе Лссура ( — всегда четное число, а число кинематических пар V класса( ) кратно трем.
должны быть целымн числами, то, следовательно, число звеньев в группе Лссура ( — всегда четное число, а число кинематических пар V класса( ) кратно трем.
Согласно соотношению (4.2) в группах Ассура могут быть следующие числа звеньев и кинематических пар V класса:

Первый столбец таблицы (4.3) относится к группам Ассура второго класса следующих пяти видов (рис. 13): а) первого, б) второго, в) третьего, г) четвертого, и) пятого.
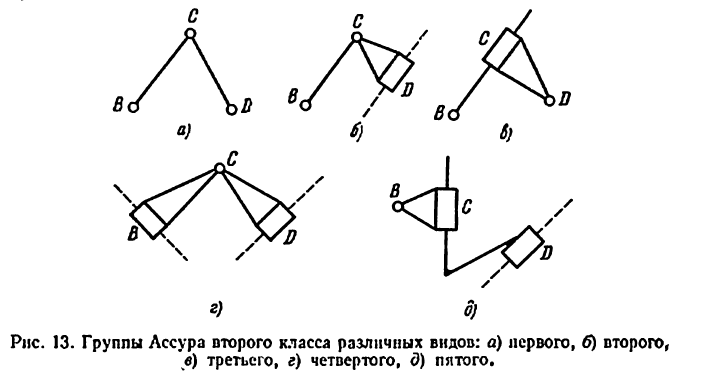
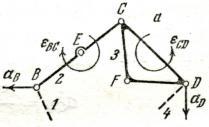
В группах Ассура различают кинематические пары внутренние (кинематическая пара С) и внешние (кинематические пары В и D на рис. 13). Число внешних кинематических пар или, точнее, их элементов, которыми группа присоединяется к не относящимся к ней звеньям механизма (например, к ведущему звену и стойке), называют порядком группы. Все группы второго класса являются группами второго порядка.
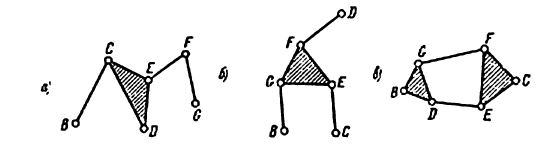
Второй столбец таблицы (4.3) позволяет образовать три варианта кинематических цепей, формально удовлетворяющих условию (4.2) (рис. 14). Кинематическая цепь, показанная на( рис. 14, а), не является группой: она распадается на две группы Ассура второго класса BCD и EFG.
Кинематическая цепь, показанная на (рис. 14, б), образует группу Ассура третьего класса третьего порядка. В этой группе кинематические пары В, С, D будут внешними, и пары Е, F, G — внутренними.
Кинематическая цепь, изображенная на(рис. 14, в), называется группой Ассура четвертого класса второго порядка. В этой группе кинематические пары В и С будут внешними, а пары D, E , F , G — внутренними.
Класс группы Ассура выше второго определяется числом внутренних кинематических пар, образующих так называемый исходный контур.
Группы Ассура третьего и более высоких классов по видам не различаются.
Класс механизма определяется наивысшим классом группы Ассура, которая входит в его состав. Следует иметь в виду, что изменением ведущего звена можно либо повысить, либо понизить класс механизма. Поэтому при всех прочих равных условиях класс механизма зависит и от выбора ведущего звена. Кинематический и силовой анализы механизма усложняются с повышением класса механизма, следовательно, всегда надо стремиться выбирать ведущее звено так, чтобы класс
механизма оказался наинизшим из всех возможных для данной кинематической схемы механизма.
Пример задачи №1.
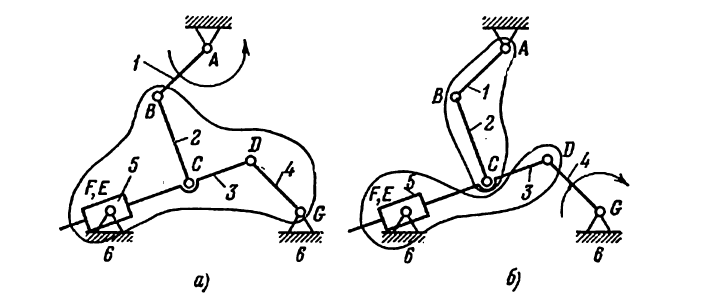
(На рис 18) показана схема механизма конхоидографа с ведущим звеном в двух вариантах: на (рис. 18, а) — это звено 1, на (рис. 18, б) — звено 4.
четвертое.
Решение:
1) Определяется степень подвижности механизма по формуле Чебышева. Так как 


 то, следовательно,
то, следовательно,

2) Так как =1, то достаточно одного ведущего звена, что и указано в условии задачи.
3) Разложение на группы Ассура. По первому варианту (ведущее звено 1) от механизма можно отделить только кинематическую цепь, состоящую из звеньев 2, 3, 4 и 5. Эта цепь представляет собой группу Ассура третьего класса третьего порядка ,так как в ней три внутренних кинематических пары (вращательные пары D, C и поступательная E) и три внешних ( вращательные пары B,G и F) По второму варианту (рис. 18, б) от механизма последовательно отделяются группы Ассура второго класса, состоящие из звеньев 1 и 2, 3 и 5.
4) Формула строения механизма запишется так. При ведущем звене  Механизм третьего класса. При ведущем звене
Механизм третьего класса. При ведущем звене  Механизм второго класса.
Механизм второго класса.
Аналитическое определение положений, скоростей и ускорений звеньев механизмов
1. Функцией положения ведомого звена (или точки на нем) называется зависимость его (или ее) перемещения от перемещения ведущего звена (или точки на нем).
На (рис. 19) показано ведущее звено n с точкой N на нем и ведомое звено с точкой К на нем. Положение ведущего звена n определяется угловой
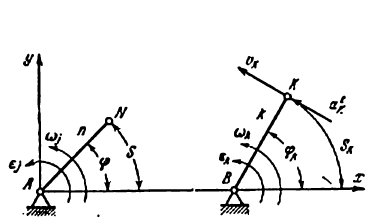
координатой  а положение точки N—дугой S. Положение ведомого звена определяется углом
а положение точки N—дугой S. Положение ведомого звена определяется углом  а положение точки K—дугой
а положение точки K—дугой 
Функция положения звена :

Функция положения точки К :

Вид функции положения зависит от схемы механизма, а значения постоянных, которые входят в нее, —от размерных параметров механизма.
Для того чтобы составить функцию положении механизма, следует рассмотреть фигуру, которую образуют оси его звеньев. Из геометрических свойств этой фигуры находят искомую зависимость (подробнее об этом см. книгу В. Л. Зиновьева «Теория механизмов и машин», Физматгиз, 1972).
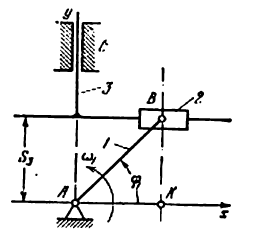
Пример задачи №2.
В синусном механизме (рис. 20) ведущим является звено 1, а ведомым — звено 3. Положение ведущего звена определяется углом  а положение ведомого звена —расстоянием
а положение ведомого звена —расстоянием  отсчитываемым от оси
отсчитываемым от оси  в направлении оси
в направлении оси  Для этого механизма требуется составить функцию положения звена 3
Для этого механизма требуется составить функцию положения звена 3
Решение:
Опускаем из точки В ил линию Ах перпендикуляр ВК, где точка В —проекция оси вращательной кинематической пары В на плоскость движения точек звеньев плоского механизма.
В последующем изложении аналогично будут обозначаться проекции осей вращательных кинематических пар на плоскость движения точек звеньев плоских механизмов, например, для некоторой вращательной пары С—точка С.
Из треугольника АВК имеем  но
но  a
a  и тогда искомая функция положения для звена 3 примет вид
и тогда искомая функция положения для звена 3 примет вид

Единственным размерным параметром в этом механизме будет размер  Угловая скорость
Угловая скорость  ведомого звена находится из равенства
ведомого звена находится из равенства

где  —угловая скорость ведущего звена n. Производная
—угловая скорость ведущего звена n. Производная  называется аналогом угловой скорости ведомого pвена или передаточным отношением отpвена к звену n и обозначается так:
называется аналогом угловой скорости ведомого pвена или передаточным отношением отpвена к звену n и обозначается так:
аналог угловой скорости

передаточное отношение

Скорость  точки К может быть найдена из равенства
точки К может быть найдена из равенства

Производная  называется аналогом скорости ведомой точки К или передаточным отношением от точки К к звену n и обозначается так; аналог линейной
называется аналогом скорости ведомой точки К или передаточным отношением от точки К к звену n и обозначается так; аналог линейной

передаточное отношение

Из формул (5.2)—(5.5) следует, что

т. е. передаточное отношение от звена (точки К) к звену n является отношением скорости звена (точки К) к скорости звена n.
Таким образом, соотношения скоростей в механизме зависят только от кинематической схемы механизма и его размерных параметров, причем значения скоростей определяются значением скорости ведущего звена.
Пример задачи №3.
Найти скорость звена 3 синусного механизма (рис. 20), если скорость звена 1 равна 
Решение:
Находим аналог скорости звена 3 по формуле (5.5а):

Скорость звена 3 находим по формуле (5.4):

3. Угловое ускорение  звена или касательное ускорение
звена или касательное ускорение точки К можно найти следующим образом.
точки К можно найти следующим образом.
Угловое ускорение равно

Здесь  — угловое ускорение ведущего звена n.
— угловое ускорение ведущего звена n.
Касательное ускорение равно

Производные  называются аналогами углового и касательного ускорений ведомого звена(или точки К на нем), соответствующих постоянному значению угловой скорости ведущего звена
называются аналогами углового и касательного ускорений ведомого звена(или точки К на нем), соответствующих постоянному значению угловой скорости ведущего звена  . Эти аналоги обозначаются соответственно так:
. Эти аналоги обозначаются соответственно так:
аналог углового ускорения

аналог касательного ускорения

Из формул (5.6а) и (5.6б) следует, что ускорения ведомых звеньев механизма полностью определяются аналогами их скоростей и ускорений и законом движения ведущего звена.
Пример задачи №4.
Для синусного механизма (рис. 20) найти ускорение звена 3, если угловая скорость звена  равна
равна  а его угловое ускорение равно
а его угловое ускорение равно 
Решение:
Аналогом ускорения звена 3 является

а ранее найденный аналог скорости его есть 

 поэтому искомым ускорением звена 3 по формуле (5.66) будет
поэтому искомым ускорением звена 3 по формуле (5.66) будет

Планы положений, скоростей и ускорений механизмов
1. Задачи о положениях, скоростях и ускорениях решаются применительно к группам Ассура, которыми образован механизм.
Эти задачи решаются в такой последовательности:
- Проводится структурный анализ и классификация механизма по Ассуру.
- Выбирается ведущее звено (при=1). За ведущее звено обычно выбирают звено, которое совершает вращательное движение и может совершить полный оборот вокруг неподвижной оси. Задается закон движения этого звена (как правило, задается равномерное вращение этого звена).
- Выбирается масштаб чертежа и на чертеже наносятся неподвижные элементы кинематических пар механизма. По заданной обобщенной координате строится положение ведущею звена.
- Строятся планы положений каждой группы Ассура в соответствии с последовательностью образования ими механизма.
- Строятся планы скоростей.
- Строятся планы ускорений.
Масштабы для планов положений, скоростей и ускорений подбирают так, чтобы планы получились достаточно точными и лучше использовалось поле чертежа.
В курсе теории механизмов и машин принято понимать под масштабом той или иной величины отношение этой величины к отрезку, который ее изображает на чертеже.
Размерности масштабов для кинематических величин таковы: масштаба длин —  скоростей —
скоростей —  ускорений —
ускорений —
2. Покажем решение задачи о положениях на конкретном примере.
Кстати готовые на продажу задачи тут, и там же теория из учебников может быть вам поможет она.
Пример задачи №5.
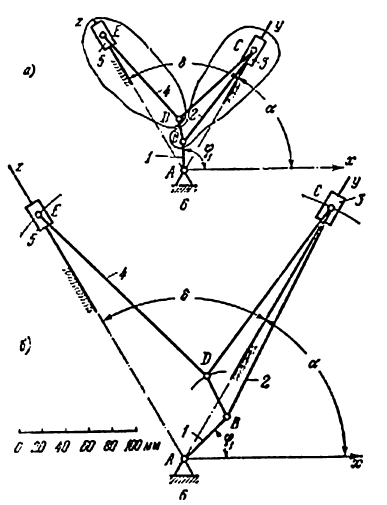
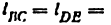
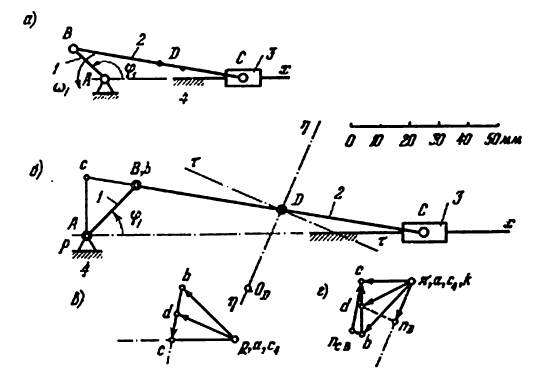
Требуется построить план положения механизма
двигателя внутреннего сгорания (рис. 21, а), у которого ведущее звено А В (первое) составляет с осью Ах угол 
 Размеры механизма:
Размеры механизма: 






Решение:
1) Число звеньев механизма число подвижных звеньев 
 число кинематических пар V класса
число кинематических пар V класса  степень подвижности механизма —
степень подвижности механизма — 


 Механизм разделяется на две группы Ассура второго класса; они образованы звеньями 4,5 и 2,3 (рис. 21, а). Формула строения механизма:
Механизм разделяется на две группы Ассура второго класса; они образованы звеньями 4,5 и 2,3 (рис. 21, а). Формула строения механизма: 


2) Ведущее звено задано в условии примера, это звено АВ.
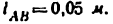
3) Отмечаем на чертеже положения неподвижных элементов кинематических пар: шарнира А и направляющих Аy и Аz (рис. 21, б).
Длину отрезка АВ, изображающего на чертеже размер ведущего звена, принимаем равной 25 мм. Тогда масштаб схемы механизма будет
Строим положение ведущего звена под заданным углом  к оси Ах.
к оси Ах.
4) Вычисляем длины отрезков ВС, BD, CD, DE:
Строим положение группы, состоящей из звеньев 2, 3. Из точки В проводим окружность радиуса ВС до пересечения с линией Ау, тем самым найдем положение точки С. Положение группы, состоящей из звеньев 2. 3, построено. На стороне ВС строим засечками треугольник BDC.
Положение группы, состоящей из звеньев 4,5, строится аналогично положениию группы, состоящей из звеньев 2, 3.
Если построить ряд последовательных положений ведущего звена и на одном и том же чертеже изобразить планы положений остальных звеньев механизма, то можно построить траекторию любой точки механизма.
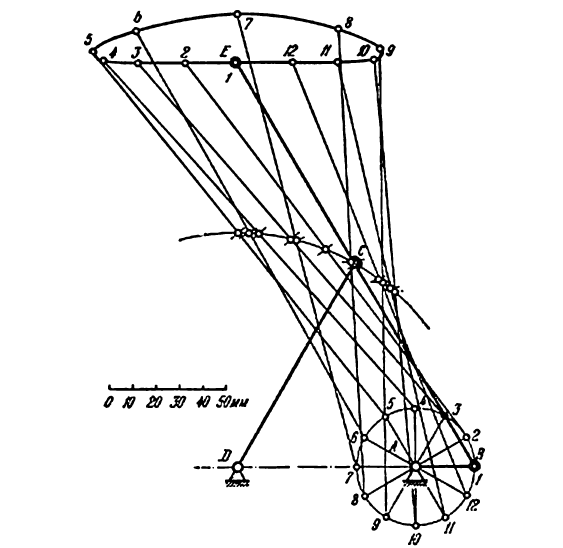
Траектории точек звена, не входящего в кинематические пары со стойкой, т. е. шатуна, называются шатунными кривыми. На ( рис. 22 )построена шатунная кривая, описываемая точкой Е ламбдообразного механизма Чебышева (построение сделано для 12 равноотстоящих положений ведущего звена). Принятые размеры звеньев: 

 масштаб
масштаб 
3. Планы скоростей и ускорений механизма строятся после решения задачи о его положении, причем построение планов проводится для отдельных групп Ассура, которые образовали механизм.
Вначале строится план скоростей (ускорений) группы, которая присоединена элементами своих внешних кинематических пар к ведущему звену и стойке, затем строятся планы скоростей (ускорений) второй и. т. д. групп, взятых в той же последовательности, в какой они присоединяются при образовании механизма. Эта последовательность обозначена в формуле строения механизма.
В дальнейшем не будет делаться различия между планами скоростей или ускорений и планами аналогов скоростей и ускорении, так как эти планы отличаются только своими масштабами. На (рис. 23, а) показано ведущее звено АВ, вычерченное в масштабе  Звено вращается с постоянной угловой скоростью Величина скорости точки В есть
Звено вращается с постоянной угловой скоростью Величина скорости точки В есть  а ее нормальное
а ее нормальное  ускорение. На плане скоростей скорость точки В изображается отрезком
ускорение. На плане скоростей скорость точки В изображается отрезком  (рис, 23, б), а нормальное ускорение этой точки — отрезком
(рис, 23, б), а нормальное ускорение этой точки — отрезком  (рис. 23, в). Масштабами планов скоростей и ускорений соответственно будут
(рис. 23, в). Масштабами планов скоростей и ускорений соответственно будут

а масштабами планов аналогов скоростей и ускорений будут
Планы скоростей и ускорений, у которых отрезки () и изображающие скорость и ускорение точки В, лежащей на ведущем звене, равны отрезку А В, изображающему на чертеже длину  , называются планами, построенными в масштабе радиуса (или в масштабе кривошипа). У таких планов масштабами скоростей и ускорений будут
, называются планами, построенными в масштабе радиуса (или в масштабе кривошипа). У таких планов масштабами скоростей и ускорений будут

Соответственно масштабами планов аналогов скоростей и ускорений будут

Когда длины звеньев механизма соизмеримы с длиной ведущего звена (не превосходят се более чем в 6—8 раз), тогда планы скоростей и ускорений желательно строить в масштабе радиуса, так как это значительно сокращает вычисления.
В некоторых случаях полезно строить повернутые планы скоростей, т. е. такие, у которых все векторы скоростей повернуты в одну и ту же сторону на 90″ относительно их действительных направлений. Эти планы отличаются от обычных (не повернутых) большей точностью построения и. кроме того, удобны в качестве рычага Жуковского для определения уравновешивающей или приведенной силы (см. § 13).
Последовательность решения задачи на построение планов скоростей и ускорений (предполагается, что задача о положении решена и, следовательно, предварительно выяснено строение механизма и назначено ведущее звено).
- Задают закон движения ведущего звена. Обычно принимают, что оно вращается равномерно. Если же нельзя считать, что оно врашается равномерно, то надо указать отношение его углового ускорения к его угловой скорости. Числовое значение угловой скорости задавать не обязательно, оно отражается только п масштабах планов скоростей и ускорений и никак не сказывается на вычислении масштабов аналогов этих планов.
- Строят план скоростей группы Ассура, непосредственно присоединенной к ведущему звену и стойке.
- Строит план ускорений этой же группы.
- Переходят к построению планов скоростей и ускорений следующей присоединенной группы Ассура и так продолжают до тех пор, пока не будут построены планы скоростей и ускорений всех групп механизма.
Задачу кинематического анализа следует считать решенной, если для каждого звена механизма будут известны положения, скорости и ускорения двух его точек или станут известными положение, скорость и ускорение одной точки и угловая координата, угловая скорость и угловое ускорение самого звена.
4*. Решим несколько примеров на построение планов скоростей и ускорений
Пример задачи №6.
Построить планы скоростей и ускорений кривошипно ползунного механизма компрессора (рис. 24, а). Найти скорость и ускорение точки С, угловую скорость и угловое ускорение шатуна ВС, а также определить длину радиуса кривизны  траектории точки D. Дано:
траектории точки D. Дано: 
 угловая скорость кривошипа АВ постоянна и равна
угловая скорость кривошипа АВ постоянна и равна 
Решение:
I) Проводим структурный анализ и устанавливаем класс за данного механизма. Число звеньев = 4, число подвижных звеньев n = 3, число кинематических пар V класса  степень подвижности механизма равна
степень подвижности механизма равна 


 Механизм образован присоединением к ведущему звену АВ и стойке 4 группы второго класса второго вида, состоящей из звеньев 2 и 3.
Механизм образован присоединением к ведущему звену АВ и стойке 4 группы второго класса второго вида, состоящей из звеньев 2 и 3.
2) Строим план положения механизма (рис. 24, б). Задаемся длиной отрезка (АВ) = 25 мм, вычисляем масштаб схемы механизма:
и по нему находим длины отрезков (ВС) и (BD):

По полученным размерам и заданному углу (на рис. 24, б) строим план положения механизма.
(на рис. 24, б) строим план положения механизма.
3) Строим план скоростей для группы 2, 3. Построение ведем по следующим двум векторным уравнениям:

где  — скорость точки В, по модулю равная
— скорость точки В, по модулю равная 

 и направленная перпендикулярно линии АВ в сторону, соответствующую направлению угловой скорости звена АВ;
и направленная перпендикулярно линии АВ в сторону, соответствующую направлению угловой скорости звена АВ;  — скорость точки С при вращении звена ВС вокруг оси шарнира В, по модулю равная
— скорость точки С при вращении звена ВС вокруг оси шарнира В, по модулю равная  —угловая скорость звена ВС, которая пока нам неизвестна) и направленная перпендикулярно линии
—угловая скорость звена ВС, которая пока нам неизвестна) и направленная перпендикулярно линии  — скорость точки
— скорость точки  стойки 4, совпадающей с точкой С (она равна нулю, так как звено 4 неподвижно);
стойки 4, совпадающей с точкой С (она равна нулю, так как звено 4 неподвижно);  — относительная скорость точки С все движении относительно точки (ее модуль неизвестен, а направлена она вдоль линии Ах).
— относительная скорость точки С все движении относительно точки (ее модуль неизвестен, а направлена она вдоль линии Ах).
Построение плана скоростей ведем в такой последовательности (рис. 24, в). Строим решение первого векторного уравнения, указанного выше: от полюса р откладываем отрезок (pb), изображающий скорость точки В, перпендикулярно линии А В и в соответствии с направлением вращения звена А В, причем длину отрезка (pb) выбираем равной (АВ) = 25 мм, т. е. строим план в масштабе кривошипа; из точки b проводим направление скорости — линию, перпендикулярную ВС.
Переходим к построению решения второго векторного уравнения, указанного выше: из точки р надо было бы отложить скорость  но она равна нулю, поэтому точку совмещаем с точкой р; из точки или, что то же, р проводим направление скорости линию, параллельную Ах, до пересечения с линией, проведенной перпендикулярно ВС, и получаем точку с — конец вектора скорости точки С. Помещаем в полюс плана точку а и на этом заканчиваем построение плана скоростей для всего механизма.
но она равна нулю, поэтому точку совмещаем с точкой р; из точки или, что то же, р проводим направление скорости линию, параллельную Ах, до пересечения с линией, проведенной перпендикулярно ВС, и получаем точку с — конец вектора скорости точки С. Помещаем в полюс плана точку а и на этом заканчиваем построение плана скоростей для всего механизма.
Скорость точки D находим по правилу подобия: конец вектора этой скорости должен лежать па линии (bс) и делить отрезок (bc) в том же отношении, в каком точка D делит отрезок ВС, т. е.
Вычисляем масштаб плана скоростей:

масштабом плана аналогов скоростей будет
Скорость  точки С равна
точки С равна

Угловая скорость звена ВС равиа

На (рис. 24, б) построен повернутый план скоростей непосредственно на схеме механизма. В этом плане полюс р совмещен с точкой А. Направление вектора скорости точки В совпадает с направлением АВ, направление скорости является продолжением линии ВС, а направление скорости точки С перпендикулярно линии Ах.
4) Строим план ускорений для группы 2, 3. Этот план строится по таким двум векторным уравнениям:

где  — нормальное ускорение (оно же полное) точки В, по модулю равное
— нормальное ускорение (оно же полное) точки В, по модулю равное

и направленное параллельно линии АВ от точки В к точке А; — нормальное ускорение точки С во вращательном движении звена ВС относительно точки В, но модулю равное
и направленное параллельно линия ВС от точки С к точке В;  — ускорение точки С в том же движении звена ВС, по модулю равное а
— ускорение точки С в том же движении звена ВС, по модулю равное а 
 (
( — угловое ускорение звена ВС, пока нам не известное) и направленное перпендикулярно линии ВС ;
— угловое ускорение звена ВС, пока нам не известное) и направленное перпендикулярно линии ВС ;  — ускорение точки
— ускорение точки  (точка звена 4; оно равно нулю, так как звено 4 неподвижно);
(точка звена 4; оно равно нулю, так как звено 4 неподвижно);  кориолисово ускорение точки С в движении ее относительно точки равное нулю, потому что звено 4 неподвижно;
кориолисово ускорение точки С в движении ее относительно точки равное нулю, потому что звено 4 неподвижно;  — относительное (релятивное) ускорение точки С в ее движении относительно точки оно направлено вдоль линии Ах.
— относительное (релятивное) ускорение точки С в ее движении относительно точки оно направлено вдоль линии Ах.
Построение плана ускорений ведем в такой последовательности (рис. 24, г). Строим решение первого векторного уравнения, указанного выше, для чего от полюса плана  откладываем отрезок
откладываем отрезок  изображающий ускорение
изображающий ускорение  , параллельно линии АВ. Длину выбираем равной (АВ) = 25 мм, т. е. строим план в масштабе кривошипа, при этом масштабы планов ускорений и их аналогов соответственно будут равны
, параллельно линии АВ. Длину выбираем равной (АВ) = 25 мм, т. е. строим план в масштабе кривошипа, при этом масштабы планов ускорений и их аналогов соответственно будут равны
От точки b откладываем отрезок  изображающий ускорение
изображающий ускорение  Длина отрезка
Длина отрезка  вычисляется так:
вычисляется так:

Через точку  проводим направление ускорения
проводим направление ускорения  — линию, перпендикулярную линии ВС, Переходим к построению решения второго векторного уравнения, указанного выше. Для этого от полюса плана откладываем вектор ускорения но оно равно нулю, поэтому точка совпадает с точкой . С этой же течкой совпадает конец вектора ускорения — точка (ускорение равно нулю). Из точки или, что то же, из точки проводим направление ускорения — линию, параллельную Ах. Точка пересечения ее с линией, проведенной перпендикулярно ВС, дает точку с — конец вектора ускорения точки С. Соединяем точки с и b и получаем вектор полного ускорения точки С при вращении звена ВС относительно точки В, т. е.
— линию, перпендикулярную линии ВС, Переходим к построению решения второго векторного уравнения, указанного выше. Для этого от полюса плана откладываем вектор ускорения но оно равно нулю, поэтому точка совпадает с точкой . С этой же течкой совпадает конец вектора ускорения — точка (ускорение равно нулю). Из точки или, что то же, из точки проводим направление ускорения — линию, параллельную Ах. Точка пересечения ее с линией, проведенной перпендикулярно ВС, дает точку с — конец вектора ускорения точки С. Соединяем точки с и b и получаем вектор полного ускорения точки С при вращении звена ВС относительно точки В, т. е.  В точку помещаем точку а. На этом заканчиваем построение плана ускорений механизма. Конец вектора ускорения точки D найдем по правилу подобия:
В точку помещаем точку а. На этом заканчиваем построение плана ускорений механизма. Конец вектора ускорения точки D найдем по правилу подобия:

Соединив точку d с полюсом плана , получаем отрезок  изображающий ускорение точки D.
изображающий ускорение точки D.
Величина ускорения точки С найдется так:

а величина углового ускорения звена ВС

5) Находим радиус кривизны траектории точки D. Через точку D (рис. 24, б) проводим линию  , параллельную отрезку (pd) на плане скоростей (рис. 24, в), — это будет направление касательной к траектории точки D. линия
, параллельную отрезку (pd) на плане скоростей (рис. 24, в), — это будет направление касательной к траектории точки D. линия  проведенная перпендикулярно линии является нормалью к этой же траектории. На ней располагается центр кривизны
проведенная перпендикулярно линии является нормалью к этой же траектории. На ней располагается центр кривизны  траектории точки D. Проектируем вектор ускорения точки D, отрезок (рнс. 24, г), на направление нормали к траектории точки D. Получим отрезок
траектории точки D. Проектируем вектор ускорения точки D, отрезок (рнс. 24, г), на направление нормали к траектории точки D. Получим отрезок  соответствующий нормальному ускорению
соответствующий нормальному ускорению  точки D. Из формулы
точки D. Из формулы

получим, что искомый радиус кривизны будет равен

Решение задач по всем темам теории машин и механизмов (ТММ)
Теория механизмов и машин (ТММ) – наука об общих методах исследования свойств механизмов и машин (анализ) и проектирования их схем (синтез). Излагаемые в ТММ методы являются общими и не зависят от целевого назначения механизмов и машин.
Теория механизмов и машин (ТММ) является первой общетехнической дисциплиной.
В ТММ изучаются свойства отдельных типовых механизмов, широко применяемых в самых различных машинах, приборах и устройствах. При этом анализ и синтез механизмов осуществляется независимо от его конкретного назначения, т.е. однотипные механизмы (рычажные, кулачковые, зубчатые и др.) исследуются одними и теми же приемами для двигателей, насосов, компрессоров и других типов машин.
В основе ТММ — методы математического анализа, векторной и линейной алгебры, дифференциальной геометрии и других разделов математики, теоремы и положения теоретической механики.
Решая задачи геометро-кинематического и динамического синтеза механических систем, ТММ является основой курсов «Детали машин», «Детали приборов» и других спецкурсов по проектированию и расчету механизмов и машин (специального назначения). В этих дисциплинах широко используются общие методы, разработанные ТММ в приложении к конкретным механизмам.
Сейчас, как и прежде, перед учеными, инженерами и конструкторами стоят задачи дальнейшего совершенствования всех видов современной техники, и в первую очередь создание новых высокопроизводительных машин и систем машин, освобождающих человека от трудоемких и утомительных процессов.
Несколько слов о методологии проектирования машин
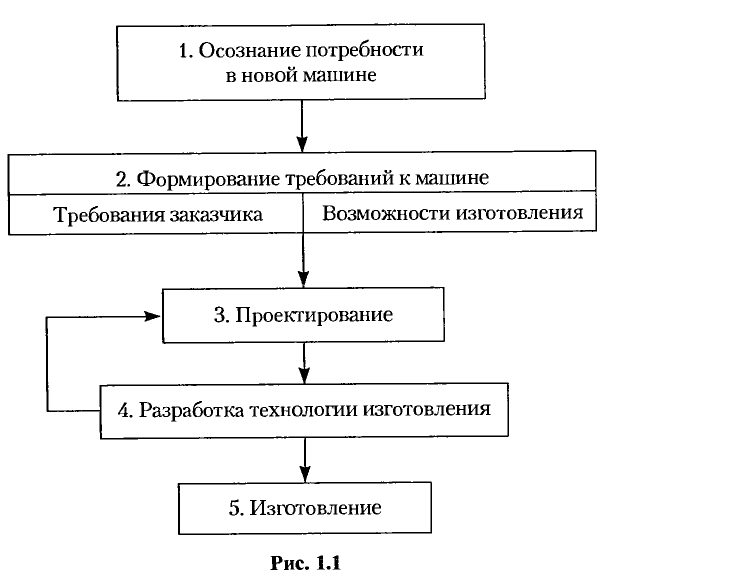
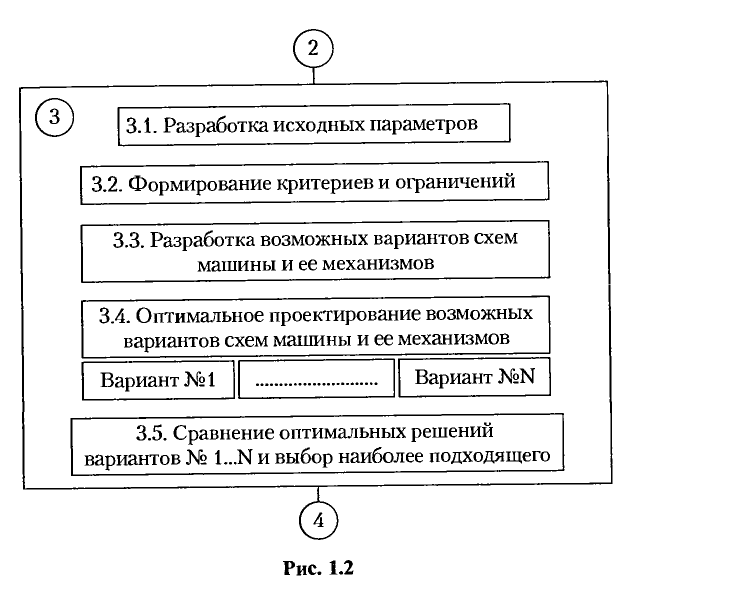
Процесс проектирования сложен и трудоемок не только в том случае, когда создается новая машина, не имеющая близких аналогов, но и тогда, когда необходимо получить более высокий качественный уровень одного или нескольких параметров машины с уже существующей кинематической схемой. Последовательность проектирования показана на рис. 1.1.
При проектировании машины должен быть осуществлен выбор ее оптимальных параметров (структурных, кинематических, точностных, динамических, эксплутационных), наилучшим образом соответствующих предъявляемым к ней требованиям. Решения, принимаемые на стадии проектирования, могут корректироваться несколько позднее, на стадии разработки технологии изготовления машины. Однако следует помнить, что качество новой машины определяется в первую очередь качеством проектирования.
Поэтому неудачные решения на этом этапе не всегда могут быть компенсированы на последующих стадиях. Затраты на качественное проектирование окупятся за счет экономии, получаемой впоследствии, включая и эксплуатацию машины.
Любая машина выполняет свой рабочий процесс посредством механического движения, поэтому она должна иметь носителя этого движения, каковым является механизм или система механизмов. Следовательно, составной частью общего процесса проектирования машины является ‘проектирование ее механизмов. Оно включает разработку и анализ возможных вариантов схем машины и ее механизмов и оценку полученных решений методами оптимизации (рис. 1.2). Поиск оптимального, т.е. наилучшего решения для каждого варианта ведется, как правило, с использованием итерационных алгоритмов, которые поддаются формализации и должны быть реализованы на ЭВМ.
Процесс проектирования состоит из нескольких итерационных (повторяющихся) циклов (рис. 1.3). Первый цикл имеет сравнительно небольшой набор исходных данных, необходимых для расчета, и заканчивается совокупностью результатов, именуемых начальными. Эти результаты расчета первого цикла позволяют, во-первых, произвести в составе исходных данных, необходимых для расчета второго цикла, нужные уточнения и, во-вторых, пополнить исходные данные новыми, неизвестными ранее параметрами. Затем следует расчет второго цикла.
Второй итерационный цикл реализуется в результате определения масс и моментов инерции звеньев и уточнения размеров сочленений звеньев. По этим данным проводится силовой расчет с учетом ускоренного движения звеньев механизма и наличия трения в кинематических парах.
Третий итерационный цикл позволяет корректировать конструкцию привода. Исходные данные, необходимые для

выбора двигателя, определяются в блоке «Динамический синтез, определение закона движения, управление движением» (см. рис. 1.3).
Проектирование нового механизма начинается с создания схемы механизма со структурно-кинематическими свойствами, соответствующими заданным с требуемой точностью. Структурные свойства механизма подразделяются на внешние — количество степеней свободы и число обеспечиваемых механизмом связанных друг с другом перемещений рабочих органов машины; и внутренние — состав механизма, т.е. его внутренняя структура (состав звеньев и способ их соединения друг с другом). С точки зрения внутренней структуры можно выделить два типа механизмов — структурно-элементарные и структурно-сложные.
Структурно-элементарные механизмы, осуществляющие преобразование и передачу движения по определенному закону, объединены в группы по способу соединения звеньев друг с другом. Такими элементарными механизмами являются рычажные, зубчатые передаточные, планетарные, кулачковые и др., которые будут рассматриваться в последующих лекциях. В состав структурно-сложных механизмов могут входить несколько элементарных механизмов с различными кинематическими свойствами.
Кинематические свойства проектируемого механизма определяются его геометро-кинематическими характеристиками, связывающими параметры движения на входе механизма и на выходе из него. Основные геометро-кинематические характеристики механизмов: функция положения, определяющая связь координат выходного и входного звеньев, и кинематическая передаточная функция, являющаяся первой производной от функции положения.
Известно очень большое количество разновидностей как структурно-элементарных, так и структурно-сложных механизмов, обладающих разнообразными структурно-кинематическими характеристиками. Поэтому при проектировании нового механизма следует проанализировать возможности использования уже существующих механизмов для осуществления заданной функции. Для этого необходимо использовать систематизацию существующих схем механизмов [7, 9, 19, 14] по структурно-кинематическим признакам с определением их кинематических характеристик. Во многих случаях геометро-кинематические характер.
Механизм и его элементы
Механизмом называется система твердых тел, объединенных геометрическими или динамическими связями, и предназначенных для преобразования движения входного звена в требуемое движение выходных звеньев.
Твердые тела, входящие в состав механизма, не являются абсолютно твердыми, однако их деформации обычно весьма малы.
Главное назначение создаваемого механизма — осуществление технической операции в результате движения его элементов.
Звено — это твердое тело, входящее в состав механизма.
Кинематическая пара — это соединение двух соприкасающихся звеньев, допускающее их относительное движение.
Звено, относительно которого рассматривается движение остальных звеньев, считается условно-неподвижным и называется стойкой.
Входное звено — это звено, которому сообщается движение, преобразуемое механизмом в требуемое движение других звеньев.
Выходное звено — это звено, совершающее движение, для выполнения которого предназначен данный механизм.
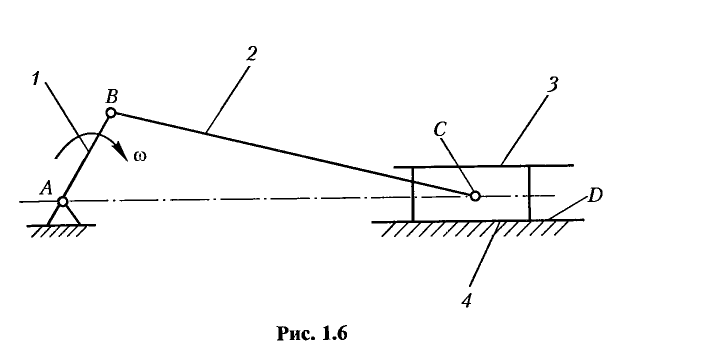
Рассмотрим простейший кривошипно-ползунный механизм на рис. 1.6, основные элементы которого: кривошип (1); шатун (2); ползун (3); стойка (4), составляющие кинематические пары A, B, C, D.
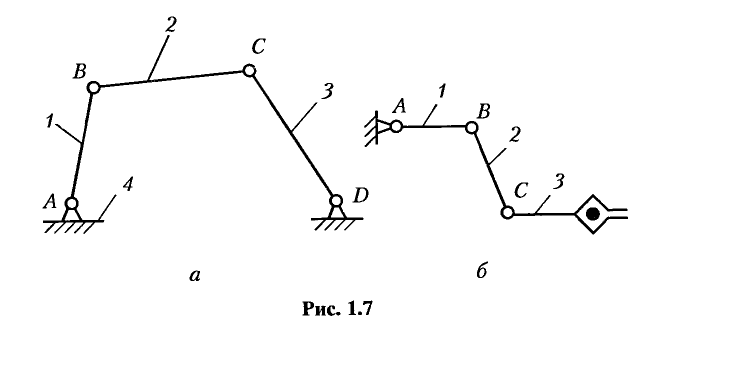
Несколько звеньев, связанных между собой кинематическими парами, образуют кинематическую цепь, которая может быть: а) замкнутой, у которой звенья образуют один или несколько замкнутых контуров; б) незамкнутой, звенья которой не образуют замкнутых контуров (рис. 1.7, цифровые и буквенные обозначения такие же, как на рис 1.6).
В современном машиностроении применяются машины и механизмы с абсолютно твердыми (жесткими), упругими (гибкими), жидкими и газообразными телами (звеньями).
Преобладающее большинство используемых в механизмах звеньев являются абсолютно твердыми. К упругим звеньям относят пружины, мембраны и другие элементы, упругая деформация которых вносит существенные изменения в работу механизма; к гибким — ремни, цепи, канаты; к жидким и газообразным — масло, воду, газ, воздух и т.п. вещества.
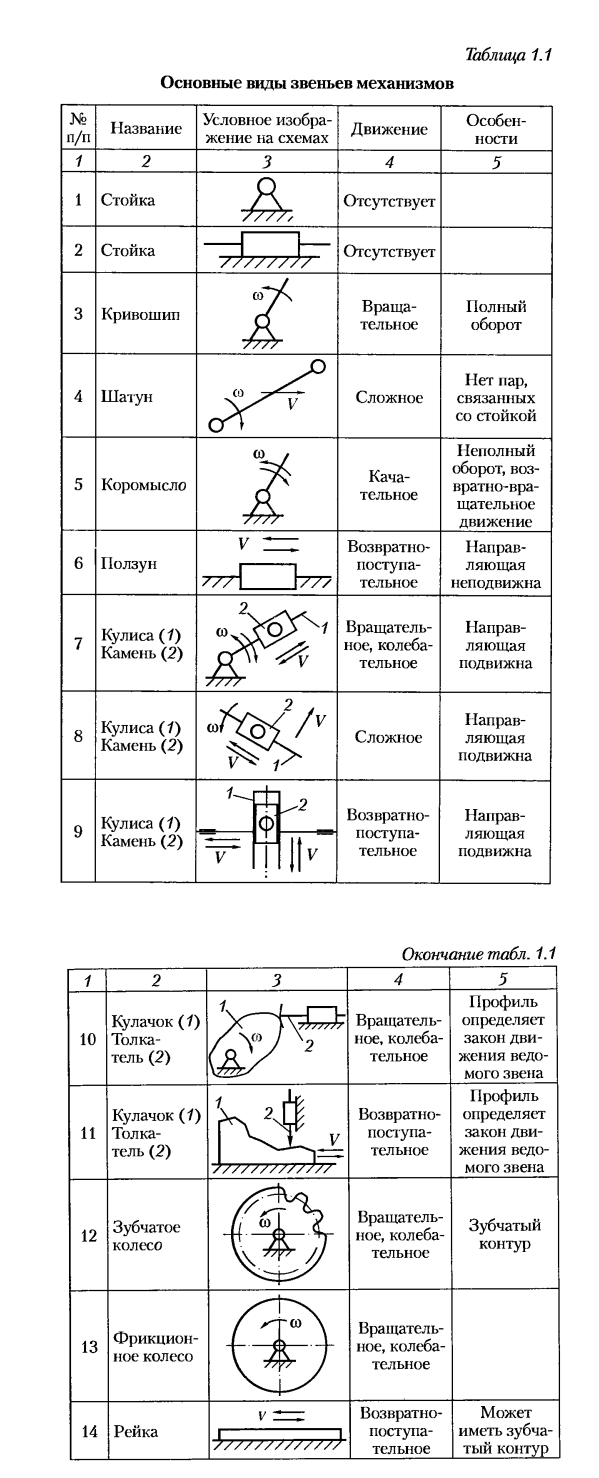
Основные виды звеньев механизмов показаны в табл. 1.1
Классификация кинематических пар
Каким бы ни был механизм машины, он всегда состоит только из звеньев и кинематических пар.
Условия связи, налагаемые в механизмах на подвижные звенья, в теории машин и механизмов принято называть кинематическими парами.
Кинематической парой называется подвижное соединение двух соприкасающихся звеньев, обеспечивающее их определенное относительное движение.
В табл. 2.1 представлена классификация кинематических пар, приведены названия, рисунки, условные обозначения наиболее распространенных на практике способов подвижных соединений звеньев.
Звенья при объединении их в кинематическую пару могут соприкасаться между собой по поверхностям, линиям и точкам.
Элементами кинематической пары называют совокупность поверхностей, линий или точек, по которым происходит подвижное соединение двух звеньев, и которые образуют кинематическую пару. В зависимости от вида контакта элементов кинематических пар различают высшие и низшие кинематические пары.
Кинематические пары, образованные элементами в виде линии или точки, называются высшими.
Кинематические пары, образованные элементами в виде поверхностей, называются низипши.
Чтобы пара существовала, элементы входящих в нее звеньев должны находиться в постоянном контакте, т.е. быть замкнутыми. Замыкание кинематических пар может быть геометрическим или силовым, осуществляемым, например, с помощью собственной массы, пружин и т.п.
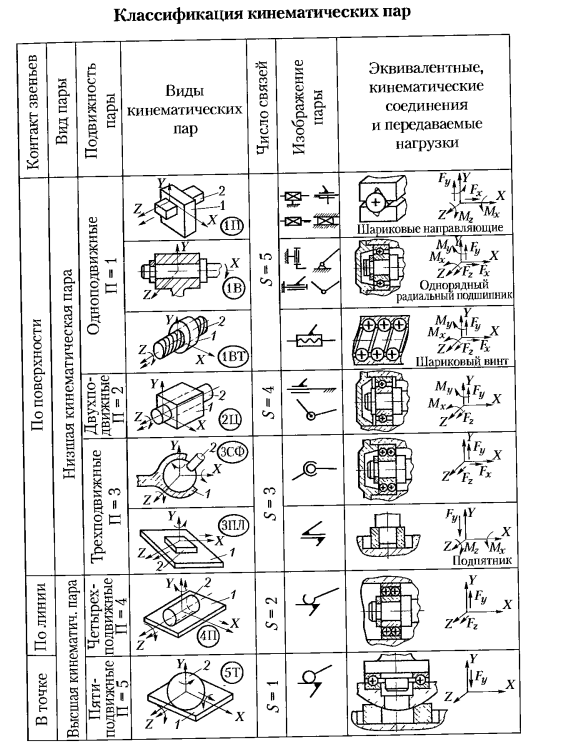
Примечания. Вилы кинематических пар: 111 — поступательная; 1В — вращательная: 1 ВТ — вращательная точечная; 2Ц — цилиндрическая: ЗСФ — сферическая; ЗИЛ — плоскостная: 411 — четырехподвижная с линейным контактом; 5Т — пятиподвижная с точечным контактом.
Прочность, износостойкость и долговечность кинематических пар зависят от их вида и конструктивного исполнения. Низшие пары более износостойкие, чем высшие. Это объясняется тем, что в низших парах контакт элементов пар происходит по поверхности, а следовательно, при одинаковой нагрузке в них возникают меньшие удельные давления, чем в высших. Износ, при прочих равных условиях, пропорционален удельному давлению, поэтому низшие пары изнашиваются медленнее, чем высшие. Использование низших пар с целью уменьшения износа в машинах предпочтительнее, однако применение высших кинематических пар часто позволяет значительно упростить структурные схемы машин, что снижает их габариты и упрощает конструкцию. Поэтому правильный выбор кинематических пар является сложной инженерной задачей.
Кинематические пары разделяют также по числу степеней свободы (подвижности), которые она предоставляет соединенным посредством нее звеньям, или по числу условий связей (класс пары), налагаемых парой на относительное движение соединяемых звеньев. При использовании такой классификации разработчики машин получают сведения о возможных относительных движениях звеньев и о характере взаимодействия силовых факторов между элементами пары.
Свободное звено, находящееся в общем случае в М-мерном пространстве, допускающем П видов простейших движений, обладает числом степеней свободы Я или W-подвижно.
Так, если звено находится в трехмерном пространстве, допускающем шесть видов простейших движений — три вращательных и три поступательных вокруг и вдоль осей X, Y, Z, то говорят, что оно обладает шестью степенями свободы, или имеет шесть обобщенных координат, или шести-подвижно. Если звено находится в двухмерном пространстве, допускающем три вида простейших движений — одно вращательное вокруг Z и два поступательных вдоль осей X и У, то говорят, что оно имеет три степени свободы, или три обобщенные координаты, или оно трехподвижно и т.д.
При объединении звеньев с помощью кинематических пар они лишаются степеней свободы, значит S — число связей, которые кинематические пары налагают на соединяемые ими звенья.
В зависимости от числа степеней свободы, которым обладают в относительном движении звенья, объединенные в кинематическую пару, определяют подвижность пары (W= Н). Если Н — число степеней свободы звеньев кинематической пары в относительном движении, то подвижность пары определится следующим образом:
где П — подвижность пространства, в котором существует рассматриваемая пара; S — число налагаемых парой связей.
Следует заметить, что подвижность пары W, определенная по табл. 2.1, зависит не от вида пространства, в котором она реализуется, а только от конструкции.
Например, вращательная (поступательная) пара (см. табл. 2.1) как в шести-, так и в трехподвижном пространстве все равно останется одноподвижной. В первом случае на нее будет наложено 5 связей, а во втором случае — 2 связи, соответственно, будем иметь:
для шестиподвижного пространства:
для трехподвижного пространства:

Как видим, подвижность кинематических пар не зависит от характеристик пространства, что является преимуществом данной классификации. Напротив, часто встречающееся деление кинематических пар на классы страдает тем, что класс пары зависит от характеристик пространства, а значит, одна и та же пара в разных пространствах имеет разный класс. Это неудобно для практических целей, следовательно, такая классификация кинематических пар нерациональна, поэтому ее лучше не применять.
Можно подобрать такую форму элементов пары, чтобы при одном независимом простейшем движении возникало второе — зависимое (производное). Примером такой кинематической пары является винтовая (см. табл. 2.1). В этой паре вращательное движение винта (гайки) вызывает поступательное его (ее) перемещение вдоль оси. Такую пару следует отнести к одноподвижной, так как в ней реализуется всего одно независимое простейшее движение.
Кинематические соединения
Кинематические пары, приведенные в табл. 2.1, просты и компактны. Они реализуют практически все необходимые при создании механизмов простейшие относительные перемещения звеньев. Однако при создании машин и механизмов они применяются редко. Это обусловлено тем, что в точках соприкосновения звеньев, образующих пару, обычно возникают большие силы трения. Это приводит к значительному износу элементов пары и ее разрушению. Поэтому простейшую двухзвенную кинематическую цепь кинематической пары часто заменяют более длинными кинематическими цепями, которые в совокупности реализуют то же самое относительное движение звеньев, что и заменяемая кинематическая пара.
Кинематическая цепь, предназначенная для замены кинематической пары, называется кинематическим соединением.
Приведем примеры кинематических цепей для наиболее распространенных на практике кинематических пар: вращательной, поступательной, винтовой, сферической и плоскость-плоскость.
В табл. 2.1 показано, что простейшим аналогом вращательной кинематической пары является подшипник с телами качения. Аналогично роликовые направляющие заменяют поступательную пару и т.д.
Кинематические соединения удобнее и надежнее в эксплуатации, выдерживают значительно большие силы (моменты) и позволяют механизмам работать при высоких относительных скоростях звеньев.
Основные виды механизмов
Механизм можно рассматривать как частный случай кинематической цепи, у которой, как минимум, одно звено обращено в стойку, а движение остальных определено заданным движением входных звеньев.
Отличительными особенностями кинематической цепи, представляющей механизм, являются подвижность и определенность движения се звеньев относительно стойки.
Механизм может иметь несколько входных и одно выходное звено, в этом случае он называется суммирующим механизмом и, наоборот, одно входное и несколько выходных, тогда он называется дифференцирующим механизмом.
По своему назначению механизмы разделяются на передаточные и направляющие.
Передаточным называется механизм, предназначенный для воспроизведения заданной функциональной зависимости между перемещениями входного и выходного звеньев.
Направляющим называется механизм, у которого траектория определенной точки звена, образующего кинематические пары только с подвижными звеньями, совпадает с заданной кривой.
Рассмотрим основные виды механизмов, нашедших широкое применение в технике.
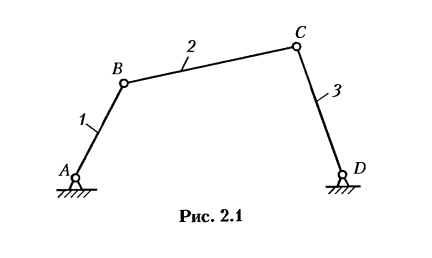
Механизмы, звенья которых образуют только низшие кинематические пары, называют шарнирно-рычажными. Эти механизмы нашли широкое применение благодаря тому, что они долговечны, надежны и просты в эксплуатации. Основным представителем таких механизмов является шарнирный четырехзвенник (рис. 2.1), состоящий из кривошипа (1), шатуна (2), коромысла (3).
Названия механизмов обычно определяются по названиям их входного и выходного звеньев или характерного звена, входящего в их состав.
В зависимости от законов движения входного и выходного звеньев, этот механизм может называться кривошип-но-коромысловым, двойным кривошипным, двойным коро-мысловым, коромыслово-кривошипным.
Шарнирный четырехзвенник применяется в станкостроении, приборостроении, а также в сельскохозяйственных, пищевых, снегоуборочных и других машинах.
Если заменить в шарнирном четырехзвеннике вращательную пару, например D, на поступательную, то получим широко известный кривошипно-ползунный механизм, различные виды которого представлены на рис. 2.2, а, б.
Главными составляющими кривошигшо-ползунных механизмов являются: кривошип (1); шатун (2); ползун (3).
Кривошипно-ползунный (ползунно-кривошипный) механизм нашел широкое применение в компрессорах, насосах, двигателях внутреннего сгорания и других машинах.
Заменив в шарнирном четырехзвеннике вращательную пару С на поступательную, получим кулисный механизм (различные виды механизмов на рис. 2.3, а, б, в). Составляющие кулисного механизма: кривошип (1); камень (2); кулиса (3). Кулисный механизм на рис. 2.3, в получен из шарнирного четырехзвенника путем замены в нем вращательных пар С и D на поступательные.
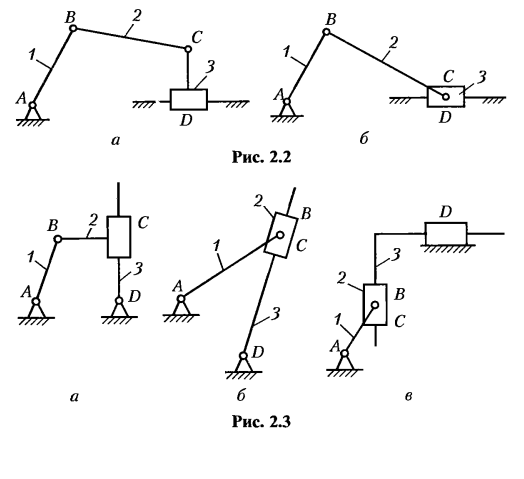
Кулисные механизмы нашли широкое применение в строгальных станках благодаря присущему им свойству асимметрии рабочего и холостого хода: у них длительный рабочий ход и быстрый, обеспечивающий возврат резца в исходное положение, холостой ход.
Большое применение шарнирно-рычажные механизмы нашли в робототехнике. В изображенном на рис. 2.4 устройстве механизма манипулятора 1, 2, 3, 4 — звенья; А, В, C,D ~ кинематические пары.
Особенностью этих механизмов является то, что они обладают большим числом степеней свободы, а значит, имеют много приводов. Согласованная работа приводов входных звеньев обеспечивает перемещение схвата по рациональной траектории и в заданное место окружающего пространства.
Широкое применение в технике получили кулачковые механизмы. При помощи кулачковых механизмов конструктивно наиболее просто можно получить практически любое движение ведомого звена по заданному закону.
В настоящее время существует большое число разновидностей кулачковых механизмов, некоторые из них представлены на рис. 2.5. Устройство кулачкового механизма: кулачок (1) плоский толкатель (2); коромысло (2); острый толкатель (2); ролик (3).
Необходимый закон движения выходного звена кулачкового механизма достигается за счет придания входному звену (кулачку) соответствующей формы. Кулачок может совершать вращательное (рис. 2.5, а, б), поступательное
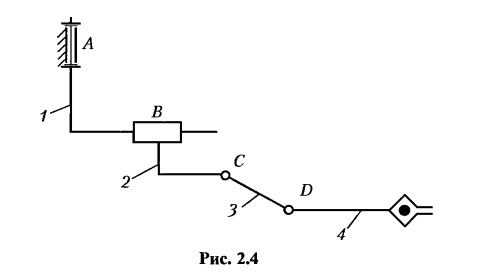
(рис. 2.5, в, г) или сложное движение. Выходное звено, если оно совершает поступательное движение (рис. 2.5, а, в), называют толкателем, а если качательное (рис. 2.5, г) — коромыслом. Для снижения потерь на трение в высшей кинематической паре В применяют дополнительное звено-ролик (рис. 2.5, г).
Кулачковые механизмы применяются как в рабочих машинах, так и в разного рода командоаппаратах.
Очень часто в металлорежущих станках, прессах, различных приборах и измерительных устройствах применяются винтовые механизмы, простейший из которых представлен на рис. 2.6. Он состоит из винта (1); гайки (2) и кинематических пар А, В, С.
Винтовые механизмы обычно применяются там, где необходимо преобразовать вращательное движение во взаимозависимое поступательное или наоборот
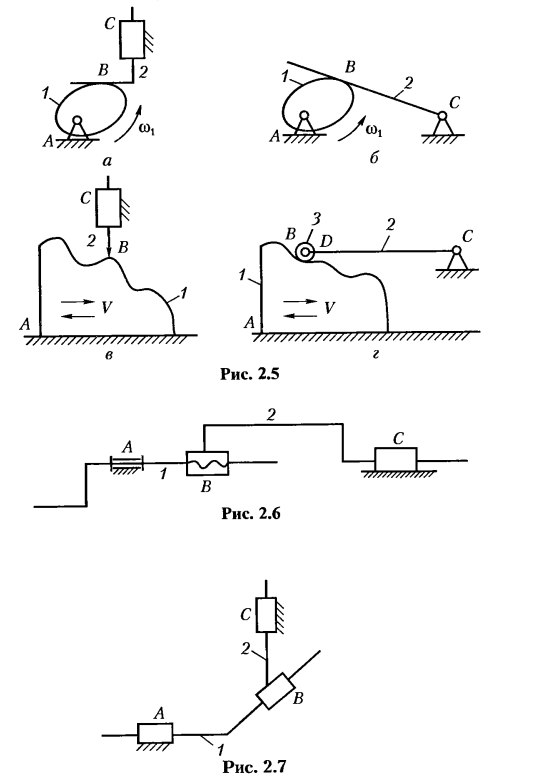
Взаимозависимость движений устанавливается правильным подбором геометрических параметров винтовой пары В.
Клиновые механизмы (рис. 2.7) применяются в различного вида зажимных устройствах и приспособлениях, в которых требуется создать большое усилие на выходе при ограниченных силах, действующих на входе. Отличительной особенностью этих механизмов являются простота и надежность конструкции: 1,2 — звенья; Л, Я, С — кинематические пары (см. рис. 2.7).
Механизмы, в которых передача движения между соприкасающимися телами осуществляется за счет сил трения, называются фрикционными. Простейшие трехзвен-ные фрикционные механизмы представлены на рис. 2.8: фрикционный механизм с параллельными осями (а); фрикционный механизм с пересекающимися осями (б); реечный фрикционный механизм (в). Основные составляющие механизмов: входной ролик 1; выходной ролик (колесо) 2; рейка 2 (см. рис. 2.8).
Вследствие того, что звенья 1 и 2 прижаты друг к другу, по линии касания между ними возникает сила трения, которая увлекает за собой ведомое звено 2.
Широкое применение фрикционные передачи получили в приборах, лентопротяжных механизмах, вариаторах (механизмах с плавной регулировкой числа оборотов).
Для передачи вращательного движения по заданному закону между валами с параллельными, пересекающимися и перекрещивающимися осями применяются различного вида зубчатые механизмы. При помощи зубчатых колес можно осуществлять передачу движения как между валами с неподвижными осями, так и с осями, перемеищаюищимися в пространстве.
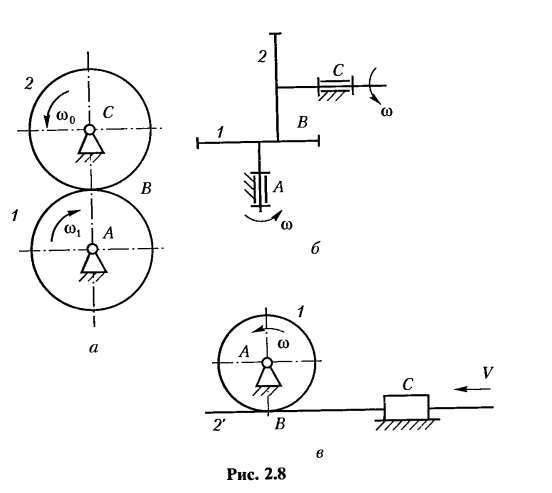
Зубчатые механизмы применяют для изменения частоты и направления вращения выходного звена, суммирования или разделения движений.
На рис. 2.9 показаны основные представители зубчатых передач с неподвижными осями: цилиндрическая (а), коническая (б); торцовая (в); реечная (г), состоящие из шестерни 1, зубчатого колеса 2 и рейки 2*.
Меньшее из двух зацепляющихся зубчатых колес называют шестерней, а большее — зубчатым колесом.
Рейка является частным случаем зубчатого колеса, у которого радиус кривизны равен бесконечности.
Если в зубчатой передаче имеются зубчатые колеса с подвижными осями, то их называют планетарными (рис. 2.10). Планетарная зубчатая передача состоит из: 0 — стойки, представляющей зубчатое колесо 3 с внутренним зацеплением; солнечного зубчатого колеса 1, сателлита 2; водила Н; низших кинематических пар A, D, Е; высших кинематических пар В, С.
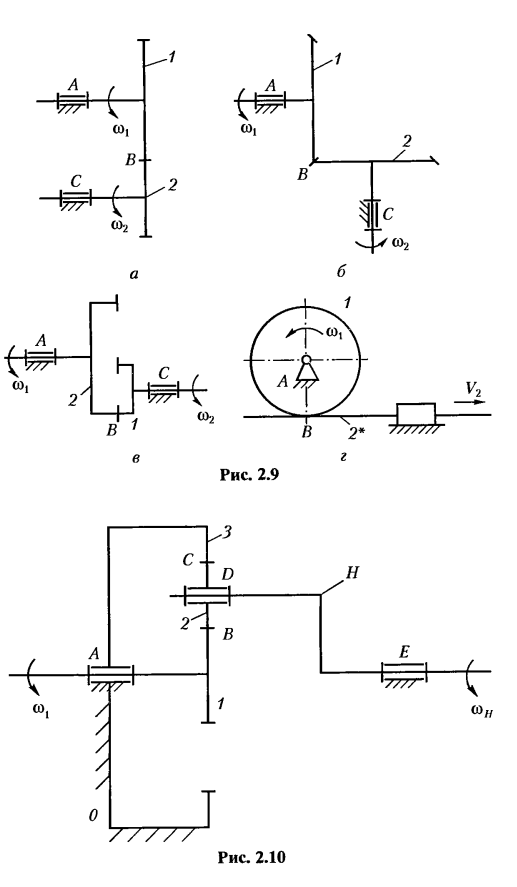
Планетарные зубчатые передачи позволяют передавать большие мощности и передаточные числа при меньшем числе зубчатых колес, чем передачи с неподвижными осями. Они также широко применяются при создании суммирующих и дифференциальных механизмов.
Передача движений между перекрещивающимися осями осуществляется с помощью червячной передачи (рис. 2.11), состоящей из червяка 1 и червячного колеса 2.
Червячная передача получается из передачи винт-гайка путем продольной разрезки гайки и ее двукратного сворачивания во взаимно перпендикулярных плоскостях. Червячная передача обладает свойством самоторможения и позволяет в одной ступени реализовывать большие передаточные отношения.
К зубчатым механизмам прерывистого движения относят также механизм «мальтийского креста», или мальтийский механизм. На рис. 2.12 показан механизм четырех-лопастного «мальтийского креста».
Механизм «мальтийского креста» преобразует непрерывное вращение ведущего звена — кривошипа 1 с цевкой 3 в прерывистое вращение креста 2; цевка 3 без удара входит в радиальный паз креста 2 и поворачивает его на угол —,  где z — число пазов. Механизм имеет массивную неподвижную стойку 4.
где z — число пазов. Механизм имеет массивную неподвижную стойку 4.
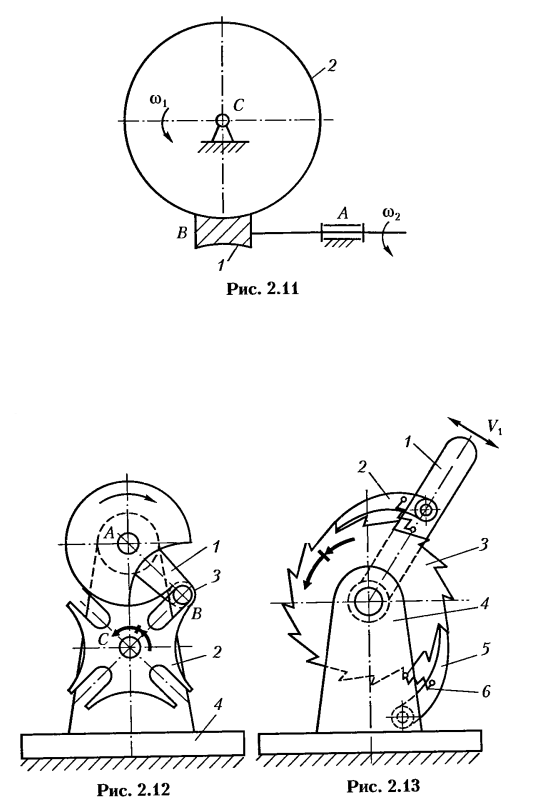
Для осуществления движения только в одном направлении применяют храповые механизмы. На рис. 2.13 показан храповый механизм, состоящий из коромысла 1, храпового колеса 3, стойки 4, собачек 2, 5 и пружины 6.
При качаниях коромысла 1 качающаяся собачка 2 сообщает вращение храповому колесу 3 только при движении коромысла против часовой стрелки. Для удержания колеса 3 от самопроизвольного поворота по часовой стрелке при движении коромысла против хода часов служит стопорная собачка 5 с пружиной 6 .
Мальтийские и храповые механизмы широко применяются в станках и приборах.
Если необходимо передать на относительно большое расстояние механическую энергию из одной точки пространства в другую, то применяют механизмы с гибкими звеньями.
В качестве гибких звеньев, передающих движение от одного звена механизма к другому, используются ремни, канаты, цепи, нити, ленты, шарики и т.п.
На рис. 2.14 приведена структурная схема простейшего механизма с гибким звеном, состоящего из малого шкифа 1, гибкого элемента 2 и большого шкифа 3
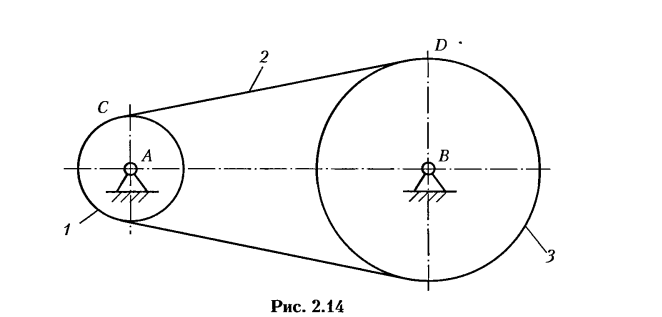
Передачи с гибкими звеньями широко применяются в машиностроении, приборостроении и других отраслях промышленности.
Выше были рассмотрены наиболее типичные простейшие механизмы. Большое количество механизмов приводится в специальной литературе, патентах и справочниках, например таких, как [7, 9, 14].
Структурные формулы механизмов
Существуют общие закономерности в структуре (строении) самых различных механизмов, связывающие число степеней свободы W механизма с числом звеньев и числом и видом его кинематических пар. Эти закономерности носят название структурных формул механизмов.
Для пространственных механизмов в настоящее время наиболее распространена формула Малышева, вывод которой производится следующим образом.
Пусть в механизме, имеющем m звеньев (включая стойку), 
 — число одно-, двух-, трех-, четырех-и пятиподвижных пар. Число подвижных звеньев обозначим n=m- 1. Если бы все подвижные звенья были свободными телами, общее число степеней свободы было бы равно 6n. Однако каждая одноподвижная пара V класса накладывает на относительное движение звеньев, образующих пару, 5 связей, каждая двухподвижная пара IV класса — 4 связи и т.д. Следовательно, общее число степеней свободы, равное шести, будет уменьшено на величину
— число одно-, двух-, трех-, четырех-и пятиподвижных пар. Число подвижных звеньев обозначим n=m- 1. Если бы все подвижные звенья были свободными телами, общее число степеней свободы было бы равно 6n. Однако каждая одноподвижная пара V класса накладывает на относительное движение звеньев, образующих пару, 5 связей, каждая двухподвижная пара IV класса — 4 связи и т.д. Следовательно, общее число степеней свободы, равное шести, будет уменьшено на величину

где i = Н — подвижность кинематической пары;  — число пар, подвижность которых равна i. В общее число наложенных связей может войти некоторое число q избыточных (повторных), которые дублируют другие связи, не уменьшая подвижности механизма, а только обращая его в статически неопределимую систему [12]. Поэтому число степеней свободы пространственного механизма, равное числу степеней свободы его подвижной кинематической цепи относительно стойки, определяется по следующей формуле Малышева:
— число пар, подвижность которых равна i. В общее число наложенных связей может войти некоторое число q избыточных (повторных), которые дублируют другие связи, не уменьшая подвижности механизма, а только обращая его в статически неопределимую систему [12]. Поэтому число степеней свободы пространственного механизма, равное числу степеней свободы его подвижной кинематической цепи относительно стойки, определяется по следующей формуле Малышева:

или в краткой записи

при q = 0 механизм — статически определимая система, при q > 0 — статически неопределимая система.
В общем случае решение уравнения (2.2) — трудная задача, поскольку неизвестны W и q; имеющиеся способы решений сложны и не рассматриваются в данной лекции. В частном случае, если W, равное числу обобщенных координат механизма, найдено геометрическим способом, из этой формулы можно найти число избыточных связей1

и решить вопрос о статической определимости механизма; или же, зная, что механизм статически определимый, найти (или проверить) W.
Важно заметить, что в структурные формулы не входят размеры звеньев, поэтому при структурном анализе механизмов можно предполагать их любыми (в некоторых пределах). Если избыточных связей нет (q = 0), сборка механизма происходит без деформирования звеньев, последние как бы самоустанавливаются; поэтому такие механизмы называют самоустанавливающимися [12]. Если избыточные связи есть (q > 0), то сборка механизма и движение его звеньев становятся возможными только при деформировании последних.
Для плоских механизмов без избыточных связей структурная формула носит имя П. Л. Чебышева, впервые предложившего ее в 1869 г. для рычажных механизмов с вращательными парами и одной степенью свободы. В настоящее время формула Чебышева распространяется на любые плоские механизмы и выводится с учетом избыточных связей следующим образом.
Пусть в плоском механизме, имеющем т звеньев (включая стойку),  — число подвижных звеньев,
— число подвижных звеньев,  — число низших пар и
— число низших пар и  — число высших пар. Если бы все подвижные звенья были свободными телами, совершающими плоское движение, общее число степеней свободы было бы равно 3n. Однако каждая низшая пара накладывает на относительное движение звеньев, образующих пару, две связи, оставляя одну степень свободы, а каждая высшая пара накладывает одну связь, оставляя две степени свободы.
— число высших пар. Если бы все подвижные звенья были свободными телами, совершающими плоское движение, общее число степеней свободы было бы равно 3n. Однако каждая низшая пара накладывает на относительное движение звеньев, образующих пару, две связи, оставляя одну степень свободы, а каждая высшая пара накладывает одну связь, оставляя две степени свободы.
В число наложенных связей может войти некоторое число  избыточных (повторных) связей, устранение которых не увеличивает подвижности механизма. Следовательно, число степеней свободы плоского механизма, т.е. число степеней свободы его подвижной кинематической цепи относительно стойки, определяется по следующей формуле Чебышева:
избыточных (повторных) связей, устранение которых не увеличивает подвижности механизма. Следовательно, число степеней свободы плоского механизма, т.е. число степеней свободы его подвижной кинематической цепи относительно стойки, определяется по следующей формуле Чебышева:

Если  известно, отсюда можно найти число избыточных связей
известно, отсюда можно найти число избыточных связей

Индекс «п» напоминает о том, что речь идет об идеально плоском механизме, или, точнее, о его плоской схеме, поскольку за счет неточностей изготовления плоский механизм в какой-то мере является пространственным.
По формулам (2.2)—(2.5) проводят структурный анализ имеющихся механизмов и синтез структурных схем новых механизмов.
Структурный анализ и синтез механизмов. Влияние избыточных связей на работоспособность и надежность машин
Как было сказано выше, при произвольных (в некоторых пределах) размерах звеньев механизм с избыточными связями (q > 0) нельзя собрать без деформирования звеньев. Поэтому такие механизмы требуют повышенной точности изготовления, в противном случае в процессе сборки звенья механизма деформируются, что вызывает нагружение кинематических пар и звеньев значительными дополнительными силами (сверх тех основных внешних сил, для передачи которых механизм пред назначен). При недостаточной точности изготовления механизма с избыточными связями трение в кинематических парах может сильно увеличиться и привести к заклиниванию звеньев, поэтому с этой точки зрения избыточные связи в механизмах нежелательны.
Что касается избыточных связей в кинематических цепях механизма, то при конструировании машин их следует стремиться устранять или же оставлять минимальное количество, если полное их устранение оказывается невыгодным из-за усложнения конструкции или по каким-либо другим соображениям. В общем случае оптимальное решение следует искать, учитывая наличие необходимого технологического оборудования, стоимость изготовления, требуемые ресурс работы и надежность машины. Следовательно, это весьма сложная задача для каждого конкретного случая.
Методику определения и устранения избыточных связей в кинематических цепях механизмов рассмотрим на примерах.
Пусть плоский четырехзвенный механизм с четырьмя одноподвижными вращательными парами 
 рис. 2.15, а) за счет неточностей изготовления (например, вследствие непараллельности осей А и D) оказался пространственным. Сборка кинематических цепей 4, 3, 2 и отдельно 4, 1 не вызывает трудностей, а точки В, В’ можно расположить на оси х. Однако собрать вращательную пару В, образованную звеньями 1 и 2, можно будет лишь совместив системы координат Bxyz и B’x’y’z’, для чего потребуется линейное перемещение (деформация)
рис. 2.15, а) за счет неточностей изготовления (например, вследствие непараллельности осей А и D) оказался пространственным. Сборка кинематических цепей 4, 3, 2 и отдельно 4, 1 не вызывает трудностей, а точки В, В’ можно расположить на оси х. Однако собрать вращательную пару В, образованную звеньями 1 и 2, можно будет лишь совместив системы координат Bxyz и B’x’y’z’, для чего потребуется линейное перемещение (деформация)
точки В’ звена 2 вдоль оси х и угловые деформации звена 2 вокруг осей x и z (показаны стрелками). Это означает наличие в механизме трех избыточных связей, что подтверждается и по формуле (2.3): q = 1 -6-3 + 5-4 = 3. Для того чтобы данный пространственный механизм был статически определимым, нужна другая структурная схема, например изображенная на рис. 2.15, б, где W=1,  р2 = 1, р3 = 1. Сборка такого механизма произойдет без натягов, поскольку совмещение точек В и В‘ будет возможно за счет перемещения точки С в цилиндрической паре.
р2 = 1, р3 = 1. Сборка такого механизма произойдет без натягов, поскольку совмещение точек В и В‘ будет возможно за счет перемещения точки С в цилиндрической паре.
Возможен вариант механизма (рис. 2.15, в) с двумя сферическими парами (р, = 2, р3 = 2); в этом случае, помимо основной подвижности механизма  появляется местная подвижность
появляется местная подвижность  — возможность вращения шатуна 2 вокруг своей оси ВС; эта подвижность не влияет на основной закон движения механизма и может быть даже полезна с точки зрения выравнивания износа шарниров: шатун 2 может при работе механизма поворачиваться вокруг своей оси за счет динамических нагрузок.
— возможность вращения шатуна 2 вокруг своей оси ВС; эта подвижность не влияет на основной закон движения механизма и может быть даже полезна с точки зрения выравнивания износа шарниров: шатун 2 может при работе механизма поворачиваться вокруг своей оси за счет динамических нагрузок.
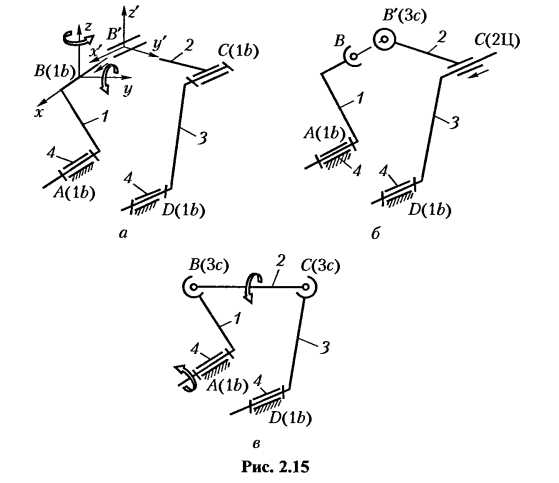
Формула Малышева подтверждает, что такой механизм будет статически определимым:

Наиболее простой и эффективный способ устранения избыточных связей в механизмах приборов — применение высшей пары с точечным контактом взамен звена с двумя низшими парами; степень подвижности плоского механизма в этом случае не меняется, поскольку по формуле Чебышева (при  ):
):

На рис. 2.16, а, б, в дан пример устранения избыточных связей в кулачковом механизме с поступательно движущимся роликовым толкателем. Механизм (см. рис. 2.16, а) — четырехзвенный (n = 3); кроме основной подвижности (вращение кулачка 1) имеется местная подвижность (независимое вращение круглого цилиндрического ролика 3 вокруг своей оси); следовательно,  Плоская схема избыточных связей не имеет (механизм собирается без натягов:
Плоская схема избыточных связей не имеет (механизм собирается без натягов: 
 Если вследствие неточностей изготовления механизм считать пространственным, то при линейном контакте ролика 3 с кулачком 1? по формуле Малышева, при
Если вследствие неточностей изготовления механизм считать пространственным, то при линейном контакте ролика 3 с кулачком 1? по формуле Малышева, при  получим q = 1, но при определенном условии. Кинематическая пара цилиндр—цилиндр (см. рис. 2.16, б) при невозможности относительного поворота звеньев 1, 3 вокруг оси z была бы трехподвижной парой. Если же такой поворот вследствие неточности изготовления имеет место, но мал и практически сохраняется линейный контакт (при нагруже-нии пятно контакта по форме близко к прямоугольнику), то данная кинематическая пара будет четырехподвижной, следовательно,
получим q = 1, но при определенном условии. Кинематическая пара цилиндр—цилиндр (см. рис. 2.16, б) при невозможности относительного поворота звеньев 1, 3 вокруг оси z была бы трехподвижной парой. Если же такой поворот вследствие неточности изготовления имеет место, но мал и практически сохраняется линейный контакт (при нагруже-нии пятно контакта по форме близко к прямоугольнику), то данная кинематическая пара будет четырехподвижной, следовательно, 


Снижая класс высшей пары путем применения бочкообразного ролика (пятиподвижная пара с точечным контактом, см. рис. 2.16,в), получим при  и
и 



 — механизм статически определимый. Однако при этом следует помнить, что линейный контакт звеньев, хотя и требует при q > 0 повышенной точности изготовления, позволяет передать большие нагрузки, чем точечный контакт
— механизм статически определимый. Однако при этом следует помнить, что линейный контакт звеньев, хотя и требует при q > 0 повышенной точности изготовления, позволяет передать большие нагрузки, чем точечный контакт
На (рис. 2.16, г, д) дан другой пример устранения избыточных связей в зубчатой четырехзвенной передаче 


 контакт зубьев колес 1, 2 и 2, 3 — линейный). В этом случае, по формуле Чебышева,
контакт зубьев колес 1, 2 и 2, 3 — линейный). В этом случае, по формуле Чебышева, 


 — плоская схема избыточных
— плоская схема избыточных
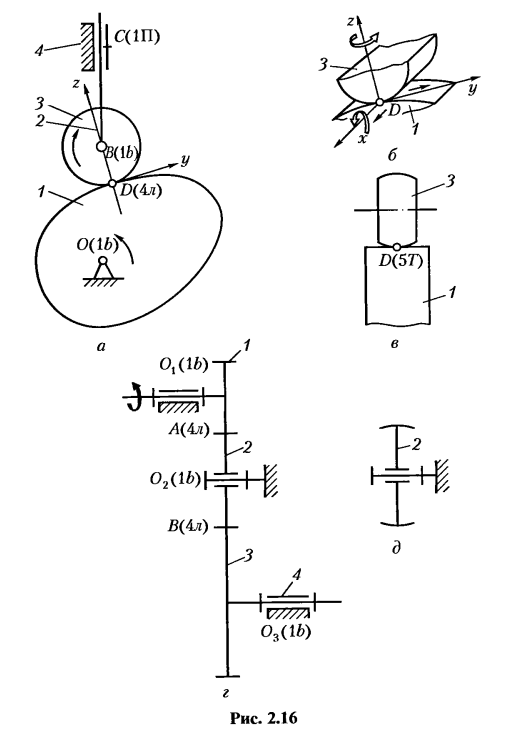
связей не имеет; по формуле Малышева, q = 1 — 6 • 3 + 5- 3 + 2- 2 = 2 — механизм статически неопределимый, следовательно, потребуется высокая точность изготовления, в частности для обеспечения параллельности геометрических осей всех трех колес.
Заменив зубья промежуточного колеса 2 на бочкообразные (см. рис. 2.16, д), получим q =1-6-3 + 5- 3+1-2 = 0 — статически определимый механизм.
Кинематические характеристики механизмов
Основным назначением механизма является выполнение им требуемых движений. Эти движения могут быть описаны посредствам его кинематических характеристик. К ним относят координаты точек и звеньев, их траектории, скорости и ускорения. К числу кинематических характеристик относятся и такие характеристики, которые не зависят от закона движения начальных звеньев, определяются только строением механизма и размерами его звеньев и в общем случае зависят от обобщенных координат. Это функции положения, кинематические передаточные функции скорости и ускорения.
Для создания механизмов, наилучшим образом отвечающих поставленным требованиям, надо знать методы определения кинематических характеристик механизмов.
Различают следующие методы определения кинематических характеристик механизмов:
- Геометрический метод — основанный на анализе векторных контуров кинематических цепей механизмов, представленных в аналитическом или графическом виде.
- Метод преобразования координат точек механизма, решаемый в матричной или тензорной форме (обычно применяется для исследования кинематических цепей манипуляторов промышленных роботов с использованием ЭВМ).
- Метод кинематических диаграмм — метод численного интегрирования и дифференцирования (решаемый с помощью ЭВМ или графически).
- Метод планов положений, скоростей и ускорений, основанный на решении векторных уравнений, связывающих кинематические параметры, в графическом виде или аналитической форме.
- Экспериментальный метод.
Кинематика входных и выходных звеньев
Число независимых друг от друга кинематических параметров механизма с заданными размерами звеньев и структурной схемой равно числу степеней свободы механизма или числу обобщенных координат механизма.
Звено, которому приписывается одна или несколько обобщенных координат, называют начальным звеном. Например, звено 1, вращающееся вокруг неподвижной точки, т.е. образующее со стойкой 2 сферическую кинематическую пару (рис. 5.1, а), имеет три степени свободы и его положение определяется тремя параметрами — тремя углами Эйлера: . Звено 1, вращающееся вокруг неподвижной оси, т.е. образующее со стойкой 2 вращательную кинематическую пару (рис. 5.1, б), имеет одну степень свободы, и его положение определяется одним параметром, например угловой координатой . Звено, перемещающееся поступательно относительно стойки (рис. 5.1, в), имеет также одну степень свободы и его положение определяется одним параметром — координатой
. Звено 1, вращающееся вокруг неподвижной оси, т.е. образующее со стойкой 2 вращательную кинематическую пару (рис. 5.1, б), имеет одну степень свободы, и его положение определяется одним параметром, например угловой координатой . Звено, перемещающееся поступательно относительно стойки (рис. 5.1, в), имеет также одну степень свободы и его положение определяется одним параметром — координатой  . Любой механизм предназначен для преобразования движения входного звена 1 (рис. 5.2, а, б) или входных звеньев (рис. 5.2, в) в требуемые
. Любой механизм предназначен для преобразования движения входного звена 1 (рис. 5.2, а, б) или входных звеньев (рис. 5.2, в) в требуемые
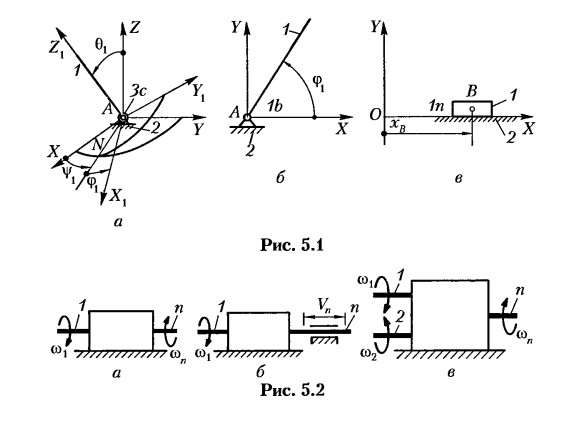
движения звеньев, для выполнения которых предназначен механизм. Входному звену механизма с одной степенью свободы обычно присваивают номер 1, а выходному звену — номер  промежуточным звеньям — порядковые номера: 2,3,…, i…, n— 1.
промежуточным звеньям — порядковые номера: 2,3,…, i…, n— 1.
Во многих случаях при проектировании машин и механизмов закон изменения обобщенных координат в функции времени удается определить только на последующих стадиях проектирования, обычно после динамического исследования движения агрегата с учетом характеристик сил, приложенных к звеньям механизма масс и моментов инерции звеньев. В таких случаях движение выходных и промежуточных звеньев определяется в два этапа: на первом устанавливаются зависимости кинематических параметров звеньев и точек от обобщенной координаты, т.е. определяются относительные функции (функции положения и передаточные функции механизма), а на втором — определяется закон изменения обобщенной координаты от времени и зависимости кинематических параметров, выходных и промежуточных звеньев от времени.
Функцией положения механизма называется зависимость углового или линейного перемещения точки или звена механизма от времени или обобщенной координаты.
Кинематическими передаточными функциями механизма называются производные от функции положения но обобщенной координате. Первая производная называется первой передаточной функцией или аналогом скорости (обозначаются  ), вторая производная — второй передаточной функцией или аналогом ускорения (обозначаются
), вторая производная — второй передаточной функцией или аналогом ускорения (обозначаются  ).
).
Кинематическими характеристиками механизма называются производные от функции положения по времени. Первая производная называется скоростью (обозначают V, о), вторая — ускорением (обозначают  ).
).
Связь между скоростью  (или ускорением
(или ускорением  ) точки С на ползуне механизма (рис. 5.3) и передаточной функцией скорости
) точки С на ползуне механизма (рис. 5.3) и передаточной функцией скорости  (или ускорения
(или ускорения  ) той же точки определяется следующими соотношениями
) той же точки определяется следующими соотношениями
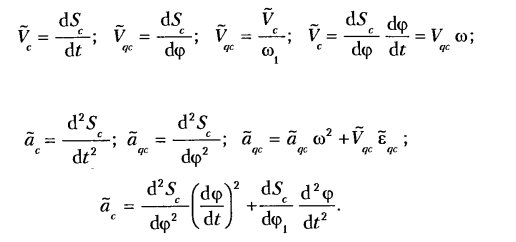
Определение кинематических характеристик плоского рычажного механизма геометрическим методом в аналитической форме
Рассмотрим пример с кривошипно-ползунным механизмом.
К основным размерам, характеризующим кинематическую схему механизма, относятся:
- длина кривошипа —
 ,
, - относительная длина шатуна —

- относительная внеосиость —

- угол наклона направляющей ползуна —

- начальная угловая координата звена 1 —

Изобразим кинематическую схему механизма (рис. 5.3)
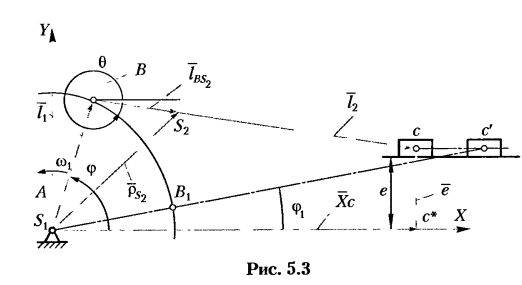
Условие замкнутости векторного контура АВСС’А для любого положения механизма выражается уравнением
Проецируя этот векторный контур на оси координат  и
и  , получим функцию положения механизма, т.е. зависимость входной координаты и выходной координаты
, получим функцию положения механизма, т.е. зависимость входной координаты и выходной координаты  :
:
Из уравнения (5.2) угловая координата 0 вектора  определяется по формуле
определяется по формуле

где 

Дифференцируя (5.2) по обобщенной координате , получим
Дифференцируя (5.1) по , получим
Передаточная функция скорости точки С:
Из векторного контура  определим радиус-вектор центра масс:
определим радиус-вектор центра масс:
Проецируя этот векторный контур на оси координат АХ и  получим координаты центра масс
получим координаты центра масс  :
:

Дифференцируя (5.7) и (5.8) по , получим проекции передаточной функции скорости точки
Дифференцируя по выражение (5.5), получим проекции передаточной функции ускорения звена 2 (шатуна):

Дифференцируя по выражение (5.6), получим передаточную функцию ускорения точки С:

Аналогично можно получить кинематические передаточные функции ускорения точки если продифференцировать (5.9) и (5.10) по :
Для общего случая движения механизма, когда  угловое ускорение шатуна:
угловое ускорение шатуна:

ускорение ползуна:

Блок-схема программы определения кинематических передаточных функций скорости кривошипио-ползуиного механизма (AR210) изображена на рис. 5.4
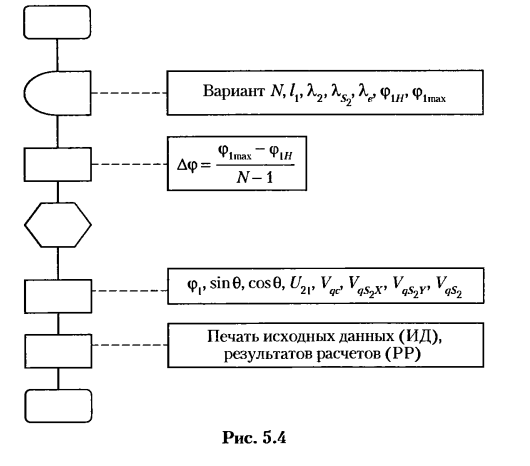
Метод планов положений, скоростей и ускорений
Кинематические характеристики кривошипно-ползунного (и любого другого) механизма могут быть определены и с помощью графоаналитического метода, или, как его чаще называют, метода планов положений, скоростей и ускорений.
Планом механизма называется масштабное графическое изображение кинематической схемы механизма соответствующее заданному положению входного звена.
Планом скоростей механизма называется чертеж, на котором изображены в виде отрезков векторы, равные по модулю и направлению скоростям различных точек механизма в данный момент.
Чертеж, на котором изображены в виде отрезков векторы, равные по модулю и направлению ускорениям различных точек звеньев механизма в данный момент, называют планом ускорений механизма.
Для иллюстрации этого метода построим план скоростей (рис. 5.5) для той же угловой координаты . Если угловая скорость  , задана, то строим план скоростей в масштабе
, задана, то строим план скоростей в масштабе 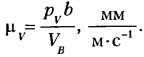 Если же неизвестна, то строим план возможных скоростей:
Если же неизвестна, то строим план возможных скоростей:
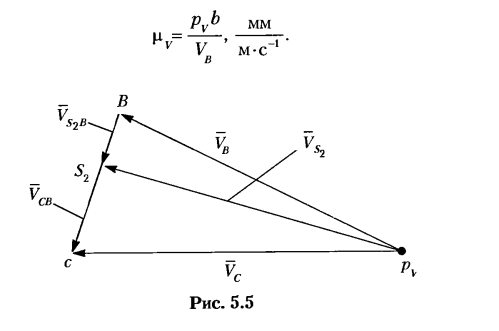
Определение скоростей. Векторные уравнения для определения скоростей точек В, С и :
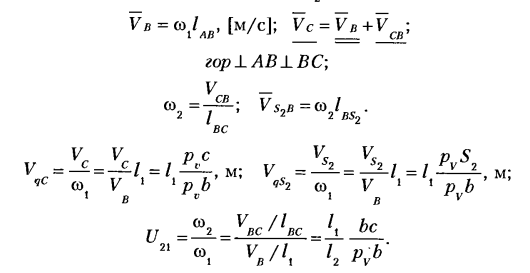
Определение ускорений. Для определения ускорений точек В и С записываем уравнения в следующем виде:
Далее строим план ускорений (рис. 5.6) в масштабе 
 Угловое ускорение шатуна (звена 2). Определяем по формуле
Угловое ускорение шатуна (звена 2). Определяем по формуле 
Решение задач по теории машин и механизмов (ТММ)
Задача №1.
На рис. 15 показана схема механизма автомата-перекоса вертолета.Ведущее звено АВ отмечено круговой стрелкой.
Решение:
1) Подсчитывается степень подвижности механизма но формуле Чебышева (2.4). Для эюго определяются общее число звеньев к = 8, число под-
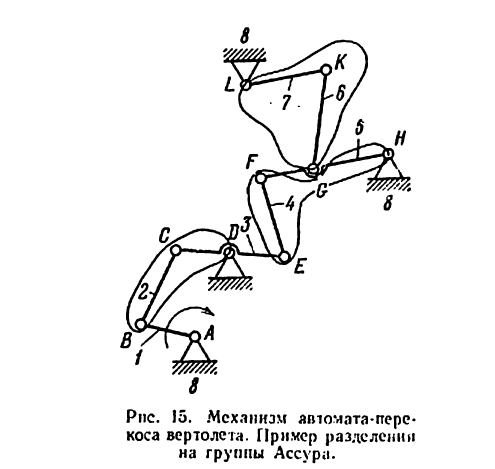
вижных звеньев  , число кииематическнх пар V класса
, число кииематическнх пар V класса  (кинематических пар IV класса нет, поэтому нет необходимости в построении заменяющего механизма). В механизме отсутствуют пассивные связи и звенья, вносящие лишние степени свободы. Степень подвижности равна
(кинематических пар IV класса нет, поэтому нет необходимости в построении заменяющего механизма). В механизме отсутствуют пассивные связи и звенья, вносящие лишние степени свободы. Степень подвижности равна

2) Ведущее звено задано в условии примера, и оно должно быть одно, так как = 1
3) Механизм расчленяется на группы Ассура. Вначале отделяется группа Ассура второго класса, образованная звеньями 7 и 6  затем группа второго
затем группа второго
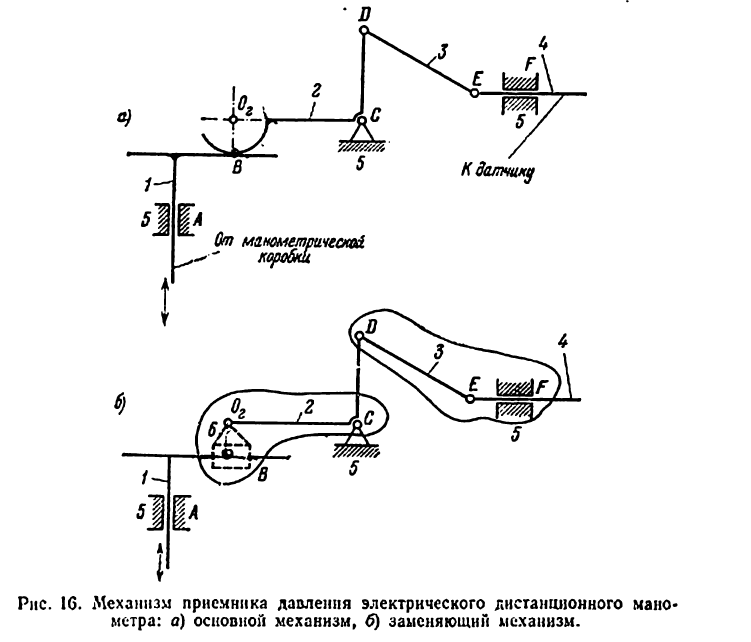
класса, состоящая из звеньев 5 и 4 (HEF), и, наконец, группа второго класса составленная звеньями 3 и 2 (DCB).
На этом расчленение механизма заканчивается, так как остались ведущее звено 1 и стойка 8 (на рисунке отделяемые группы обведены замкнутыми контурами).
4) Записывается формула строения механизма:

В этой формуле римская цифра I обозначает ведущее звено, арабские — классы присоединяемых групп (2), а индексы при арабских цифрах указывают, какие звенья образовали ведущее звено и присоединяемые группы.
Из формулы строения механизма видно, что наивысший класс присоединенных групп — второй, поэтому механизм автомата-перекоса вертолета при ведущем звене 1 следует отнести ко второму классу.
Задача №2.
На( рис. 16, а) показана схема механизма приемника давления электрического диетаЛционного манометра.
Решение:
1) Подсчитывается степень подвижности механизма по формуле Чебышева (рис. 16, а). Имеем 



 Далее получаем
Далее получаем 


Строится заменяющий механизм (рис. 16, б) (кинематическая пара IV класса В заменяется в соответствии с рис. 12, б одним звеном, входящим в две кинематические пары V класса). Для этого механизма имеем  и получаем
и получаем 


2) Ведущее звено задано в условии примера п должно быть одно, так как 
3) Механизм расчленяется на группы Ассура (рис. 16, б). Вначале отделяется группа Ассура второго класса, образованная звеньями 3 и 4 (DEF), затем группа второго класса, состоящая из звеньев 2 и 6  На этом разложение заканчивается, так как остались ведущее звено 1 и стойка 5.
На этом разложение заканчивается, так как остались ведущее звено 1 и стойка 5.
4) Записывается формула строения механизма:

Наивысший класс присоединенных групп — второй, поэтому механизм надо отнести ко второму классу (при ведущем звене 1).
Задача №3.
На (рис. 17, а )показана схема механизма газораспределения двигателя внутреннего сгорания с ведущим звеном (кулачок)
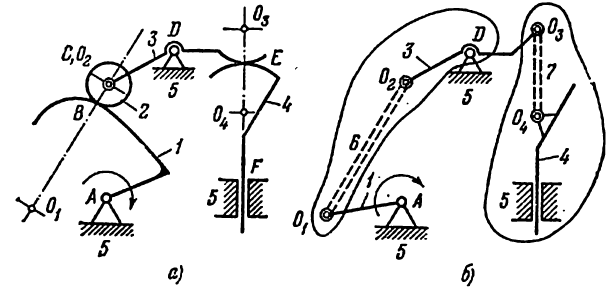
Рис. 17. Механизм газораспределения двигателя внутреннего сгорания: а) основной механизм, б) заменяющий механизм.
Решение:
1) Подсчитывается степень подвижности механизма по формуле Чебышева. Так как 


 то
то 


Круглый ролик 2, свободно вращающийся вокруг своей оси, вносит лишнюю степень свободы, поэтому при подсчете числа звеньев он не учитывается. Также в числе  кинематических пар V класса не должна учитываться пара С, в которую входит ролик.
кинематических пар V класса не должна учитываться пара С, в которую входит ролик.
Строим заменяющий механизм (рис. 17, б). Каждую кинематическую пару IV класса В и Е заменяем, согласно (рис. 12, а), одним звеном, входящим в две кинематические пары V класса. У заменяющего механизма степень подвижности будет 


 ибо у него
ибо у него
2) Так как = 1, то для сообщения звеньям механизма определенного движения достаточно иметь одно ведущее звено, что и указано в условии задачи.
3) Расчленение на группы Ассура (рис. 17, б). Вначале отделяется группа второго класса, образованная звеньями 4 и 7, затем группа второго класса, состоящая из звеньев 3 и 6; на этом разложение заканчивается, так как остались ведущее звено 1 и стойка 5.
4) Записывается формула строения механизма:

Наивысший класс присоединенных групп — второй, поэтому механизм следует отнести ко второму классу (при ведущем звене 1).
Задача №4.
На (рис. 18) показана схема механизма конхоидографа с ведущим звеном в двух вариантах: на (рис. 18, а )— это звено 1,на (рис. 18, б) — звено 4.
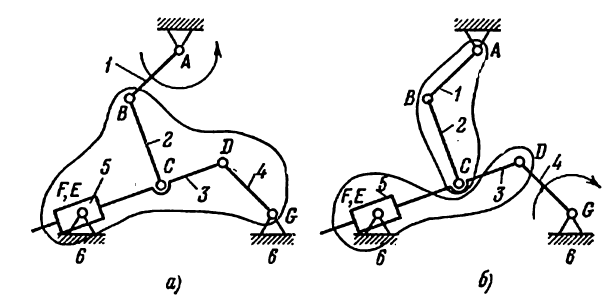
Рис. 18. Механизм конхоидографа: а) ведущее звено первое, б) ведущее звено четвертое.
Решение:
I) Определяется степень подвижности механизма по формуле Чебышева. Так как  то, следовательно,
то, следовательно,

2) Так как — 1, то достаточно одного ведущего звена, что и указано в условии задачи.
3) Разложение на группы Ассура. По первому варианту (ведущее звено 1) ог механизма можно отделить только кинематическую цепь, состоящую из звеньев 2, 3, 4 и 5. Эта цепь представляет собой группу Ассура третьего класса третьего порядка, так как в ней три внутренних кинематических пары (вращательной пары D, C и поступательная Е ) и три внешних ( вращательных пары  и F). По второму варианту (рис. 18 . б ) от механизма последовательно отделяются группы Ассура второго класса, состоящие из звеньев 1 и 2, 3 и 5.
и F). По второму варианту (рис. 18 . б ) от механизма последовательно отделяются группы Ассура второго класса, состоящие из звеньев 1 и 2, 3 и 5.
4) Формула строения механизма запишется так. При ведущем звене  Механизм третьего класса.
Механизм третьего класса.
При ведущем звене  Механизм второго класса.
Механизм второго класса.
Готовые задачи по теории машин и механизмов
Теория механизмов и машин — научная дисциплина (или раздел науки), которая изучает строение (структуру), кинематику и динамику механизмов в связи с их анализом и синтезом.
Цель ТММ — анализ и синтез типовых механизмов и их систем.
Задачи ТММ: разработка общих методов исследования структуры, геометрии, кинематики и динамики типовых механизмов и их систем.
Типовыми механизмами будем называть простые механизмы, имеющие при различном функциональном назначении широкое применение в машинах, для которых разработаны типовые методы и алгоритмы синтеза и анализа.
Задача №1
Построить планы скоростей и ускорений механизма строгального станка (рис. 25, а). Найти скорость и ускорение звена 5. Дано: 


 Угловая скорость кривошипа. А В постоянна и равна
Угловая скорость кривошипа. А В постоянна и равна 
Решение:
1) Проводим структурный анализ и устанавливаем класс механизма. Число звеньев k = 6, число подвижных звеньев n = 5, число кинематических пар V класса  степень подвижности
степень подвижности 


 Механизм образован так: к ведущему звену АВ и стойке 6 присоединена группа Ассура второго класса третьего вида, состоящая из звеньев 2 и 3, а к этой группе и стойке присоединена группа второго класса второго вида, состоящая из звеньев 4 и 5, следовательно, заданный механизм следует отнести ко второму классу.
Механизм образован так: к ведущему звену АВ и стойке 6 присоединена группа Ассура второго класса третьего вида, состоящая из звеньев 2 и 3, а к этой группе и стойке присоединена группа второго класса второго вида, состоящая из звеньев 4 и 5, следовательно, заданный механизм следует отнести ко второму классу.
2) Строим план положения механизма. Длину отрезка (AB) выбираем равной 25 мм поэтому масштаб схемы будет
Длины остальных отрезков на чертеже:
По полученным размерам строим план положения механизма (рис. 25, б)
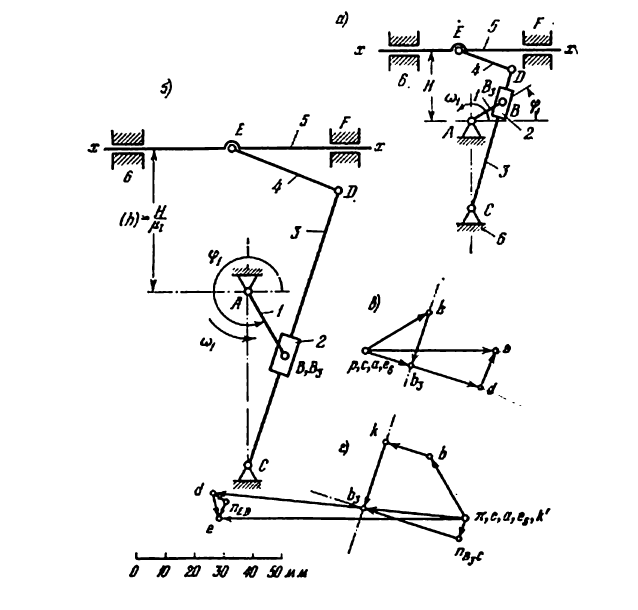
3) Строим план скоростей механизма. Начинаем с группы, состоящей из звеньев 2 и 3, так как она непосредственно присоединена к ведущему звену и стойке. Построение ведем по следующим векторным уравнениям:

где  — скорость точки
— скорость точки  звеня 3, которая лежит под точкой В;
звеня 3, которая лежит под точкой В;  — скорость точки В, по модулю равная
— скорость точки В, по модулю равная 

 и направленная перпендикулярно АВ в соответствии с направлением угловой скорости
и направленная перпендикулярно АВ в соответствии с направлением угловой скорости  скорость точки
скорость точки  относительно точки В, направленная параллельно линии ВС;
относительно точки В, направленная параллельно линии ВС;  — скорость точки С, равная нулю;
— скорость точки С, равная нулю;  — скорость точки В во вращении звена 3 относительно точки С, по модулю равная
— скорость точки В во вращении звена 3 относительно точки С, по модулю равная 
 и направленная перпендикулярно ВС (пока нам не известна).
и направленная перпендикулярно ВС (пока нам не известна).
Строим решение первого векторного уравнения, указанного выше. От полюса р плана (рис. 25, а) откладываем отрезок (pb), изображающий скорость точки В.
Длину этого отрезка принимаем равной (pb) = (АВ) 25 мм, т. е. план строим в масштабе кривошипа. Через точку b проводим направление скорости — линию, параллельную
линию, параллельную  Переходим к построению решения второго векторного уравнения, указанного выше. Надо отложить вектор скорости точки С, но так как модуль его равен нулю, то конец его с помещаем в полюс плана р и из точки р проводим направление скорости
Переходим к построению решения второго векторного уравнения, указанного выше. Надо отложить вектор скорости точки С, но так как модуль его равен нулю, то конец его с помещаем в полюс плана р и из точки р проводим направление скорости  — линию, перпендикулярную СВ. Пересечение ее с ранее проведенной линией, параллельной СВ, дает конец вектора скорости — точку
— линию, перпендикулярную СВ. Пересечение ее с ранее проведенной линией, параллельной СВ, дает конец вектора скорости — точку  Точку d — конец вектора скорости точки D— находим по правилу подобия из соотношения
Точку d — конец вектора скорости точки D— находим по правилу подобия из соотношения
откуда

Переходим к построению плана скоростей группы 4, 5. Этот план строим по уравнениям

где — скорость точки Е;
— скорость точки Е;  — скорость точки D (ее вектор отложен на плане скоростей в виде отрезка (pd);
— скорость точки D (ее вектор отложен на плане скоростей в виде отрезка (pd);  — скорость точки Е во вращении звена 4 относительно точки D, по модулю равная
— скорость точки Е во вращении звена 4 относительно точки D, по модулю равная  и направленная перпендикулярно линии DE (пока нам не известна);
и направленная перпендикулярно линии DE (пока нам не известна);  — скорость точки
— скорость точки  звена 6,которая совмещена с точкой Е (модуль ее равен нулю, так как звено 6 неподвижно);
звена 6,которая совмещена с точкой Е (модуль ее равен нулю, так как звено 6 неподвижно);  —скорость точки Е относительно точки
—скорость точки Е относительно точки  направленная параллельно линии хх. Построение сводится к проведению через точку d (согласно первому уравнению) линии, перпендикулярной DE, т.е. направлению скорости и проведению через точку р (согласно второму уравнению) линии, параллельной хх. Точка е пересечения этих линий есть конец вектора скорости точки Е. Помещаем в полюс точки
направленная параллельно линии хх. Построение сводится к проведению через точку d (согласно первому уравнению) линии, перпендикулярной DE, т.е. направлению скорости и проведению через точку р (согласно второму уравнению) линии, параллельной хх. Точка е пересечения этих линий есть конец вектора скорости точки Е. Помещаем в полюс точки  ,
,  а и на этом заканчиваем построение плана скоростей механизма.
а и на этом заканчиваем построение плана скоростей механизма.
Масштаб плана скоростей равен

Масштаб плана аналогов скоростей равен

Искомая скорость суппорта (скорость точки Е) равна

4) Строим план ускорений группы 2, 3. Построение ведем по следующим двум векторным уравнениям

где  — ускорение точки
— ускорение точки  , которая принадлежит звену 3 и совместилась с точкой В звена 1;
, которая принадлежит звену 3 и совместилась с точкой В звена 1;  — нормальное (оно же полное) ускорение точки В, по модулю равное
— нормальное (оно же полное) ускорение точки В, по модулю равное 


 и направленное параллельно АВ от точки В к точке А;
и направленное параллельно АВ от точки В к точке А;  — ускорение Кориолиса в движении точки относительно звена 2, по модулю равное
— ускорение Кориолиса в движении точки относительно звена 2, по модулю равное

так как  и
и  и имеющее направление вектора относительной скорости
и имеющее направление вектора относительной скорости  , повернутого на 90° в направлении угловой скорости
, повернутого на 90° в направлении угловой скорости  , переносного движения (движения звена 2);
, переносного движения (движения звена 2);  — относительное (релятивное) ускорение точки относительно точки В, направленное параллельно линии СВ;
— относительное (релятивное) ускорение точки относительно точки В, направленное параллельно линии СВ;  — ускорение точки С (оно равно нулю);
— ускорение точки С (оно равно нулю);  — нормальное ускорение точки во вращении звена 3 относительно точки С, по модулю равное
— нормальное ускорение точки во вращении звена 3 относительно точки С, по модулю равное
и направленное параллельно линии  от точки
от точки  к точке С;
к точке С;  — касательное ускорение точки в том же движении звена 3, по модулю равное
— касательное ускорение точки в том же движении звена 3, по модулю равное  (нам пока не известно) и направленное перпендикулярно
(нам пока не известно) и направленное перпендикулярно
Строим решение первого векторного уравнения, указанного выше (рис. 25, г). Задаемся отрезком ) = (АВ) = 25 мм, который изображает в плане ускорение  (так как () = (АВ), то план строится в масштабе кривошипа).
(так как () = (АВ), то план строится в масштабе кривошипа).
Масштаб плана ускорений равен

Масштаб плана аналогов ускорений равен
Выбранный отрезок ) откладываем от полюса плана  , далее к нему прибавляем отрезок
, далее к нему прибавляем отрезок  — вектор кориолисова ускорения — его длину находим по формуле
— вектор кориолисова ускорения — его длину находим по формуле

отрезки  взяты из плана скоростей, а отрезок
взяты из плана скоростей, а отрезок  — из плана положения). Через точку проводим, направление ускорения
— из плана положения). Через точку проводим, направление ускорения  — линию, параллельную СВ.
— линию, параллельную СВ.
Переходим к построению второго векторного уравнения. Точку с совмещаем с точкой , так как  , от точки откладываем отрезок
, от точки откладываем отрезок  , изображающий нормальное ускорение
, изображающий нормальное ускорение  , его длина равна
, его длина равна

далее через точку  проводим направление ускорения
проводим направление ускорения  — линию, перпендикулярную СВ, до пересечения с ранее проведенной через точку линией, параллельной СВ. Точка пересечения
— линию, перпендикулярную СВ, до пересечения с ранее проведенной через точку линией, параллельной СВ. Точка пересечения  представляет собой конец вектора ускорения
представляет собой конец вектора ускорения  .Конец вектора ускорения центра шарнира D (точку d) найдем по правилу подобия из соотношения
.Конец вектора ускорения центра шарнира D (точку d) найдем по правилу подобия из соотношения

Переходим к построению плана ускорений группы 4 , 5 по уравнениям

где аЕ — ускорение точки  ;
;  — ускорение точки D (оно определяется по ранее построенному отрезку
— ускорение точки D (оно определяется по ранее построенному отрезку  :
:


 ;
;
 — нормальное ускорение точки Е во вращении звена 4 относительно точки D (оно направлено параллельно линии ED от точки Е к точке D);
— нормальное ускорение точки Е во вращении звена 4 относительно точки D (оно направлено параллельно линии ED от точки Е к точке D);  касательное ускорение той же ;точки в том же движении звена 4 (оно направлено перпендикулярно линии ED);
касательное ускорение той же ;точки в том же движении звена 4 (оно направлено перпендикулярно линии ED);  -ускорение точки
-ускорение точки  , которая принадлежит звену 6 и совмещена с точкой Е (оно равно нулю);
, которая принадлежит звену 6 и совмещена с точкой Е (оно равно нулю); — кориолисово ускорение точки Е в движении ее относительно стойки (точки оно равно нулю);
— кориолисово ускорение точки Е в движении ее относительно стойки (точки оно равно нулю);  — относительное (релятивное) ускорение точки Е относительно стойки (точки ; оно направлено параллельно линии xx;).
— относительное (релятивное) ускорение точки Е относительно стойки (точки ; оно направлено параллельно линии xx;).
В соответствии с первым векторным уравнением от точки d откладываем отрезок ( , изображающий нормальное ускорение
, изображающий нормальное ускорение . Его длина равна
. Его длина равна

Далее через точку  проводим направление ускорения
проводим направление ускорения  (линию, перпендикулярную ED) и переходим к построениям, соответствующим второму векторному уравнению, указанному выше. В точке помещаем точки
(линию, перпендикулярную ED) и переходим к построениям, соответствующим второму векторному уравнению, указанному выше. В точке помещаем точки  и
и  так как модули ускорений
так как модули ускорений  и
и  равны нулю. Из точки проводим направление ускорения
равны нулю. Из точки проводим направление ускорения  (линию, параллельную хх) до пересечения с линией, ранее проведенной из точки
(линию, параллельную хх) до пересечения с линией, ранее проведенной из точки  . Точка пересечения е является концом вектора ускорения точки E, т. е. ускорения
. Точка пересечения е является концом вектора ускорения точки E, т. е. ускорения  .Располагаем в полюсе плана точку а и на этом заканчиваем построение плана ускорения механизма.
.Располагаем в полюсе плана точку а и на этом заканчиваем построение плана ускорения механизма.
Искомое ускорение суппорта (точки Е) будет равно

Задача №2
Методом планов найти угловые скорость и ускорение лепестка (звена 5) в механизме привода лепестков фотозатвора (рис. 26, а). Дано: 


 ,
,

 ,
,
 ,
, ,
, ,
, , угловая скорость кривошипа
, угловая скорость кривошипа  и его угловое ускорение
и его угловое ускорение 
Решение:
1) Проводим структурный анализ и устанавливаем класс механизма. Число звеньев равно k = 6, число подвижных звеньев разно n = 5, число кинематических пар V класса Степень подвижности Механизм образован так: к ведущему звену АВ и стоике (звену 6) присоединена группа Ассура второго класса первого вида, состоящая из звеньев 2 и 3, а к этой группе и стойке присоединена группа второго класса третьего вида, состоящая из звеньев 4 и 5. Заданный механизм надо отнести ко второму классу.
2) Строим план положения механизма. Длину отрезка (АВ) назначаем равной (АВ) = 10 мм, поэтому масштабом чертежа будет

Вычисляем длины остальных отрезков на чертеже:
По полученным размерам строим план положения механизма (рис. 26, б).
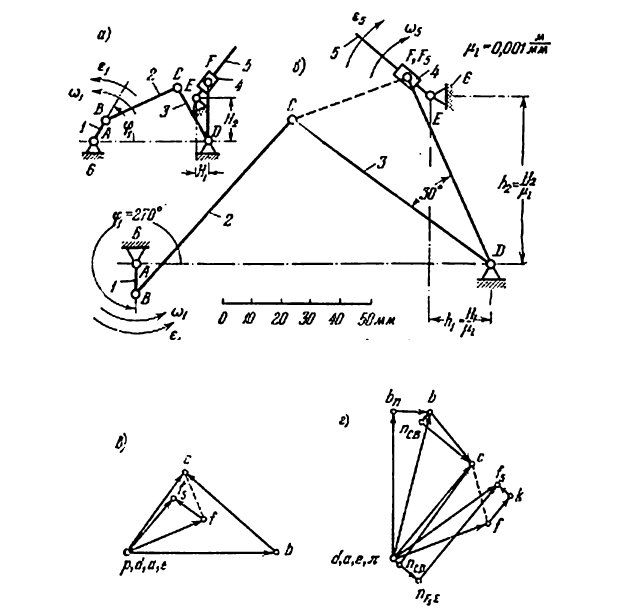
3) Строим план скоростей механизма. Начинаем с группы Ассура, состоящей из звеньев 2, 3, так как она непосредственно присоединена к ведущему звену и стойке. План строим по векторным уравнениям

где —скорость точки С; — скорость точки В, по модулю равная 

 и направленная перпендикулярно АВ в соответствии с направлением угловой скорости
и направленная перпендикулярно АВ в соответствии с направлением угловой скорости звена А В;
звена А В;  скорость точки С во вращении звена ВС относительно точки В, по модулю неизвестная и направленная перпендикулярно ВС;—скорость точки D, равная нулю;
скорость точки С во вращении звена ВС относительно точки В, по модулю неизвестная и направленная перпендикулярно ВС;—скорость точки D, равная нулю;  — скорость точки С во вращении звена CD относительно точки D, по модулю неизвестная и направленная перпендикулярно CD. Строим решение первого векторного уравнения, указанного выше. От полюса р плана (рис. 26, б) откладываем отрезок (pb), изображающий скорость и через конец его b проводим направление скорости
— скорость точки С во вращении звена CD относительно точки D, по модулю неизвестная и направленная перпендикулярно CD. Строим решение первого векторного уравнения, указанного выше. От полюса р плана (рис. 26, б) откладываем отрезок (pb), изображающий скорость и через конец его b проводим направление скорости
(отрезок (pb) взят равным (рb) = 50 мм). Переходим к построению решения второго векторного уравнения, указанного выше. Скорость = 0, поэтому конец ее (точку d) совмещаем с полюсом р и через точку р проводим направление скорости до пересечения с направлением скорости в точке с. Отрезок (рс) изображает скорость точки С. Конец векгора скорости точки F (точкуf) найдем, вычислив отрезок (pf) по правилу подобия:

Этот отрезок составит с отрезком (рс) угол Переходим к построению плана скоростей группы Ассура, состоящей из звеньев 4, 5, который должен соответствовать таким векторным уравнениям:
Переходим к построению плана скоростей группы Ассура, состоящей из звеньев 4, 5, который должен соответствовать таким векторным уравнениям:

где  — скорость точки
— скорость точки  знена 5, которая совмещается с точкой F;
знена 5, которая совмещается с точкой F; — скорость точки F она найдена предыдущим построением (отрезок
— скорость точки F она найдена предыдущим построением (отрезок  );
);  скорость точки относительно точки F, по модулю неизвестная и направленная параллельно EF,
скорость точки относительно точки F, по модулю неизвестная и направленная параллельно EF,  —скорость точки Е, равная нулю;
—скорость точки Е, равная нулю;  — скорость точки
— скорость точки  во вращении звена 5 относительно точки E, по модулю равная
во вращении звена 5 относительно точки E, по модулю равная 
 и направленная перпендикулярно EF. Построение плана сведется к проведению через точку f линии, параллельной EF (направления скорости
и направленная перпендикулярно EF. Построение плана сведется к проведению через точку f линии, параллельной EF (направления скорости  ), и через точку р линии, перпендикулярной EF (направления скорости
), и через точку р линии, перпендикулярной EF (направления скорости  )- Точка пересечения этих линий (точка
)- Точка пересечения этих линий (точка ) является концом вектора скорости точки
) является концом вектора скорости точки  (отрезок
(отрезок  ). В полюс плана помещаем точки d, е, а и на этом заканчиваем построение плана скоростей механизма.
). В полюс плана помещаем точки d, е, а и на этом заканчиваем построение плана скоростей механизма.
Масштаб плана скоростей равен

Масштаб плана аналогов скоростей равен

Угловая скорость звена 5 равна

Ее направление определяется вектором скорости  , т. е. отрезком
, т. е. отрезком  .
.
4) Строим план ускорений группы, состоящей из звеньев 2, 3. Он должен соответствовать таким векторным уравнениям:

где  — ускорение точки С;
— ускорение точки С;  — нормальное ускорение точки В, равное
— нормальное ускорение точки В, равное 
 ;
; — касательное ускорение той же точки В, равное
— касательное ускорение той же точки В, равное 

 ;
;  — нормальное ускорение точки С во вращении звена ВС относительно точки В, равное
— нормальное ускорение точки С во вращении звена ВС относительно точки В, равное  и направленное параллельно СВ:
и направленное параллельно СВ:  — касательное ускорение той же точки в том же движении звена ВС, равное
— касательное ускорение той же точки в том же движении звена ВС, равное  и направленное перпендикулярно ВС; — ускорение точки D, равное нулю;
и направленное перпендикулярно ВС; — ускорение точки D, равное нулю;  aнормальное ускорение точки С во вращении звена CD относительно точки D, равное
aнормальное ускорение точки С во вращении звена CD относительно точки D, равное  — и направленно параллельно CD;
— и направленно параллельно CD;  — касательное ускорение той же точки С в том же движении звена CD, равное
— касательное ускорение той же точки С в том же движении звена CD, равное  и направленное перпендикулярно CD.
и направленное перпендикулярно CD.
5) Приступаем к построению плана ускорений (рис. 26, г). Строим решение первого векторного уравнения, указанного выше. От полюса плана ускорений откладываем отрезок  , изображающий ускорение
, изображающий ускорение  . Длину его выбираем равной
. Длину его выбираем равной  , отчего масштаб плана ускорения будет
, отчего масштаб плана ускорения будет

От точки  откладываем отрезок
откладываем отрезок  изображающий касательное ускорение
изображающий касательное ускорение  ; этот отрезок равен
; этот отрезок равен
Далее от точки b откладываем отрезок  , изображающий нормальное ускорение
, изображающий нормальное ускорение  ; длина его равна
; длина его равна

(в нашем случае дробь и отрезок
и отрезок  взят из плана скоростей);
взят из плана скоростей);
через точку  проводим направление касательного ускорения
проводим направление касательного ускорения  — линию,перпендикулярную ВС. Затем переходим к построению решения второго векторного уравнения, указанного выше. Ускорение
— линию,перпендикулярную ВС. Затем переходим к построению решения второго векторного уравнения, указанного выше. Ускорение  поэтому конец вектора, его изображающего (точка d), совпадает с точкой — полюсом плана ускорений. От полюса откладываем отрезок (
поэтому конец вектора, его изображающего (точка d), совпадает с точкой — полюсом плана ускорений. От полюса откладываем отрезок ( ), изображающий нормальное ускорение
), изображающий нормальное ускорение  этого отрезка равна
этого отрезка равна

Далее через точку  проводим направление ускорения
проводим направление ускорения  (т. е. линию, перпендикулярную DC) до пересечения с линией действия вектора ускорения
(т. е. линию, перпендикулярную DC) до пересечения с линией действия вектора ускорения  . Точка пересечения с есть конец вектора
. Точка пересечения с есть конец вектора  искомого ускорения точки С. Соединив точки b и с на плане, получим отрезок (bс), соответствующий полному ускорению
искомого ускорения точки С. Соединив точки b и с на плане, получим отрезок (bс), соответствующий полному ускорению  . Вектор ускорения
. Вектор ускорения  точки F (отрезок
точки F (отрезок  ) находится по правилу подобия; он составляет с отрезком
) находится по правилу подобия; он составляет с отрезком  угол
угол  , а его длина находится из соотношения
, а его длина находится из соотношения

(отрезок  взят из плана ускорении). Переходим к построению плана ускорений группы Ассура, состоящей из звеньев 4, 5. Для этого пользуемся уравнениями
взят из плана ускорении). Переходим к построению плана ускорений группы Ассура, состоящей из звеньев 4, 5. Для этого пользуемся уравнениями

где  — ускорение точки
— ускорение точки  звена 5, которая совмещена с точкой F;
звена 5, которая совмещена с точкой F; — ускорение точки F (отрезок (, его изображающий, найден при построении плана ускорений для группы, состоящей из звеньев 2 и 3);
— ускорение точки F (отрезок (, его изображающий, найден при построении плана ускорений для группы, состоящей из звеньев 2 и 3);  — ускорение Кориолиса в движении точки
— ускорение Кориолиса в движении точки  относительно звена 4, по модулю равное
относительно звена 4, по модулю равное 

 и имеющее направление вектора
и имеющее направление вектора повернутого на угол, равный
повернутого на угол, равный  , в сторону вращения звена 4 или, что то же, звена 5 (звенья 4 и 5 входят в поступательную кинематическую пару, поэтому их угловые скорости одинаковы, т. е.
, в сторону вращения звена 4 или, что то же, звена 5 (звенья 4 и 5 входят в поступательную кинематическую пару, поэтому их угловые скорости одинаковы, т. е.  );
); — относительное ускорение точки относительно точки F, неизвестное по модулю и направленное параллельно линии EF;
— относительное ускорение точки относительно точки F, неизвестное по модулю и направленное параллельно линии EF;  — ускорение точки Е, равное нулю;
— ускорение точки Е, равное нулю; — нормальное ускорение точки
— нормальное ускорение точки  во вращении звена 5 относительно точки Е, по модулю равное
во вращении звена 5 относительно точки Е, по модулю равное
и направленное параллельно лннни EF;  — касательное ускорение точки в том же движении звена 5, равное по модулю
— касательное ускорение точки в том же движении звена 5, равное по модулю  и направленное перпендикулярно EF.
и направленное перпендикулярно EF.
Строим решение первого векторного уравнения, указанного выше (рис. 26, г). Oт точки  откладываем отрезок
откладываем отрезок  — ускорение
— ускорение  , длина которого
, длина которого

(дробь  -отрезки
-отрезки  ,
,  взяты из плана скоростей отрезок
взяты из плана скоростей отрезок  — из плана положения). Далее через точку k проводим направление ускорения
— из плана положения). Далее через точку k проводим направление ускорения  — линию, параллельную
— линию, параллельную 
Переходим к построению решения второго векторного уравнения, указанного выше.
Конец ускорения
точки Е (точку е) совмещаем с полюсом плана
и от нее откладываем отрезок
ускорение
.
Этот отрезок равен

(отрезок  взят из плана скоростей, а отрезок
взят из плана скоростей, а отрезок  — из плана положения). Далее через точку
— из плана положения). Далее через точку  проводим направление
проводим направление  т. е. линию, перпендикулярную
т. е. линию, перпендикулярную  , до пересечения с ранее проведенной линией, параллельной
, до пересечения с ранее проведенной линией, параллельной  (т. е. направлением ускорения
(т. е. направлением ускорения  ).
).
Точка пересечения есть конец отрезка  , изображающего ускорение
, изображающего ускорение  . В полюс плана помещаем точку а и на этом построение плана ускорений механизма заканчиваем.
. В полюс плана помещаем точку а и на этом построение плана ускорений механизма заканчиваем.
Угловое ускорение звена 5 находится по формуле

(отрезок 
 взят из плана ускорений, а отрезок
взят из плана ускорений, а отрезок 
 —из плана положения), направление углового ускорения
—из плана положения), направление углового ускорения  находим по направлению отрезка
находим по направлению отрезка  .
.

