Вектор силы (Определение, Пример)
ЧТО ТАКОЕ ВЕКТОР СИЛЫ
 Это то, что тянет и толкает; силы мы чувствуем, когда они на нас действуют; силы растягивают пружины, заставляют тело двигаться быстрее. Мы будем измерять силы при помощи пружинных весов. Поскольку эти приборы обычно градуируют в килограммах силы мы будем пока выражать силу тоже в килограммах силы.
Это то, что тянет и толкает; силы мы чувствуем, когда они на нас действуют; силы растягивают пружины, заставляют тело двигаться быстрее. Мы будем измерять силы при помощи пружинных весов. Поскольку эти приборы обычно градуируют в килограммах силы мы будем пока выражать силу тоже в килограммах силы.
При сооружении и проектировании мостов, зданий, кранов, машин инженеров очень заботит сложение сил или же разность сил для определения силы, необходимой для достижения равновесия. Можно показать, что силы — это векторы, т. е. они подчиняются правилу геометрического сложения.
Векторному сложению и разложению уравновешенных сил посвящен раздел физики, называемый «статикой». Это большой, но скучный раздел физики, и большинство учебников уделяет ему много места, излагая приемы решения задач инженерной статики. Мы ограничимся лишь несколькими примерами, и даже их, пожалуй, лучше было бы опустить, чтобы уделить больше времени изучению силы и движения.
Прежде всего мы должны удостовериться в том, что силы — это векторы. Сказать, что они должны быть векторами, поскольку они характеризуются величиной и направлением, недостаточно. Это не убеждает нас в том, что силы складываются геометрически.
Хотя это утверждение кажется вполне правдоподобным, особенно тем, кто имеет дело с канатами и веревками на кораблях или кому приходится заниматься разбивкой палаток, мы же должны проворить его непосредственно.
Опыт по определению вектора силы
 Часто прибегают еще к одному способу проверки. Этот способ проще, но его косвенный характер порой (не совсем добросовестно) игнорируют. К узлу прикладывают две тянущие силы FА и FВ (применяют гири и блоки или пружинные весы), а третья сила FС удерживает узел в покое. Затем при помощи построения определяется сумма сил FА и FВ .
Часто прибегают еще к одному способу проверки. Этот способ проще, но его косвенный характер порой (не совсем добросовестно) игнорируют. К узлу прикладывают две тянущие силы FА и FВ (применяют гири и блоки или пружинные весы), а третья сила FС удерживает узел в покое. Затем при помощи построения определяется сумма сил FА и FВ .
Она равна и проти воположна силе FС. Это требует дополнительного доказательства, поскольку FС не равнодействующая (сумма) двух других сил, а «равновесная» сила, необходимая, чтобы им противостоять.
Рис. Косвенная проверка векторного сложения сил.
Равновесие сил
 Если на какую-нибудь деталь крана или моста действует несколько сил сразу, а инженеру нужно, чтобы она была и оставалась в состоянии покоя, то для этого сумма всех действующих сил должна быть равна нулю. Тогда в соответствии с представлением Галилея эта деталь должна либо постоянно двигаться, либо постоянно оставаться в состоянии покоя.
Если на какую-нибудь деталь крана или моста действует несколько сил сразу, а инженеру нужно, чтобы она была и оставалась в состоянии покоя, то для этого сумма всех действующих сил должна быть равна нулю. Тогда в соответствии с представлением Галилея эта деталь должна либо постоянно двигаться, либо постоянно оставаться в состоянии покоя.
В этом случае мы говорим, что силы находятся «в равновесии». Если сумма нескольких сил равна нулю, то это должно быть видно на диаграмме векторного сложения; длина линии, соединяющей исходную точку диаграммы с конечной, должна быть равна нулю. Это означает, что векторная диаграмма должна представлять собой замкнутую фигуру.
Таким образом, если сумма сил равна нулю, то конец векторного многоугольника должен прийти обратно к началу. Это иллюстрирует рис. 3. Условие равенства нулю равнодействующей для постоянного равновесия сил должно выполняться для всей конструкции, например для всего крана или моста, но оно должно также выполняться для каждой отдельной детали конструкции, находящейся в состоянии равновесия.
Применяя это условие к какой-нибудь определенной детали, например к стреле крана, к одной опоре моста, к заклепке, связывающей воедино несколько различных деталей моста, или к грузу маятника, нужно быть внимательным и учитывать все силы, действующие на данную деталь. Тогда мы сможем утверждать, что имеем полный набор сил, образующих замкнутую векторную диаграмму, если, конечно, деталь находится в равновесии.
При решении задач не следует включать в рассмотрение силы, приложенные к другим деталям. Сначала выберите и пометьте выбранную деталь, которая, как вы считаете, находится в равновесии.
Равновесие трех сил, треугольник сил
 Если три силы находятся в равновесии, то их векторная диаграмма должна представлять собой замкнутый треугольник (рис. 4). Если известны две силы, то можно вычислить величину и направление третьей.
Если три силы находятся в равновесии, то их векторная диаграмма должна представлять собой замкнутый треугольник (рис. 4). Если известны две силы, то можно вычислить величину и направление третьей.
а — три силы в равновесии) б — три силы не находятся в равновесии.
Этим пользуются при решении инженерных задач. Во многих конструкциях на каждую деталь, играющую важную роль, действуют как раз три силы. Чтобы конструкция была устойчивей, каждая деталь должна оставаться в состоянии покоя; сумма всех действующих на нее сил должна быть равна нулю. Таким образом, если к любой детали приложены три силы, мы строим для них замкнутый треугольник.
Похожие страницы:
Понравилась статья поделись ей
Момент силы относительно точки и относительно оси в теоретической механике
Содержание:
Момент силы относительно точки и относительно оси:
Пусть дана сила Р, направленная как угодно в пространстве, и произвольная точка О (рис. 100).
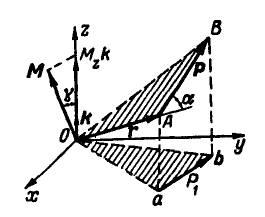
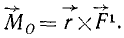
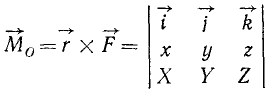
Опустим из точки О перпендикуляр на силу Р (на чертеже перпендикуляр не показан) и обозначим плечо силы Р относительно точки О через р. Тогда моментом силы Р относительно точки О (или линейным моментом силы) Называется вектор М, численно равный произведению Р на плечо р и отложенный от точки О перпендикулярно плоскости, проходящей через Р и О в такую сторону, чтобы, смотря с конца стрелки вектора М, сила Р вращала плоскость ОАВ вокруг точки О против часовой стрелки.
Если из центра моментов О провести радиус-вектор 

Из сказанного следует, что, линейный момент силы может быть представлен, как векторное произведение радиуса-вектора на силу Р, т. е.:

где  — единичный вектор направления М.
— единичный вектор направления М.
Наряду с линейным моментом силы введем в рассмотрение еще одно важное понятие момента силы относительно оси.
Пусть требуется найти момент силы Р относительно какой-либо оси, например z (рис. 100). Для этого силу Р спроектируем на любую плоскость, перпендикулярную к оси z, например на координатную плоскость хОу; обозначим эту проекцию через  . Затем из точки О пересечения оси z с плоскостью хОу опускаем перпендикуляр
. Затем из точки О пересечения оси z с плоскостью хОу опускаем перпендикуляр  на направление найденной проекции
на направление найденной проекции  силы Р. Тогда произведение
силы Р. Тогда произведение  , взятое со знаком
, взятое со знаком  или
или  , и будет искомым моментом силы Р относительно оси z, т. е:
, и будет искомым моментом силы Р относительно оси z, т. е:

где знак  берется, если, смотря с положительного направления оси z, проекция силы Р представляется вращающей плоскость хОу вокруг оси z против часовой стрелки, и знак минус, если по часовой стрелке. В нашем случае (рис. 100) в правой части равенства (41) следует взять знак плюс.
берется, если, смотря с положительного направления оси z, проекция силы Р представляется вращающей плоскость хОу вокруг оси z против часовой стрелки, и знак минус, если по часовой стрелке. В нашем случае (рис. 100) в правой части равенства (41) следует взять знак плюс.
Следует заметить, что момент силы относительно оси обращается в нуль, когда сила параллельна оси или пересекает ось, т. е. когда вообще сила и ось расположены в одной плоскости.
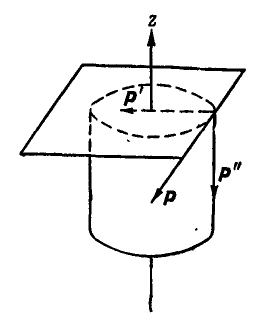
С понятием момента силы относительно оси часто придется встречаться в дальнейшем. Если представить себе цилиндр (рис. 101), который может вращаться вокруг неподвижной оси z, то сила Р, действующая на цилиндр, не будет его вращать в двух случаях: когда она пересекает ось z (положение  ) и когда она параллельна оси (положение
) и когда она параллельна оси (положение  ), т. е. когда сила Р и ось z лежат в одной плоскости и, следовательно, момент силы Р относительно оси z обращается в нуль.
), т. е. когда сила Р и ось z лежат в одной плоскости и, следовательно, момент силы Р относительно оси z обращается в нуль.
Найдем зависимость между моментом силы Р относительно оси, например z (рис. 100), и моментом силы Р относительно точки О, взятой на этой оси.
Обозначим линейный момент силы через М, а момент силы относительно оси z представим в виде вектора  , отложенного от точки О в положительном направлении оси z. Обозначим угол между М и
, отложенного от точки О в положительном направлении оси z. Обозначим угол между М и  через
через  . Из рисунка 100 видно, что
. Из рисунка 100 видно, что  представляет собой проекцию
представляет собой проекцию  на плоскость хОу, а поэтому, по известной теореме геометрии, имеем:
на плоскость хОу, а поэтому, по известной теореме геометрии, имеем:

где — угол между плоскостями треугольников, или, что то же, — между векторами М и  .
.
Умножив обе части последнего равенства на 2, получим:

Тогда на основании равенств (40) и (41) будем иметь:

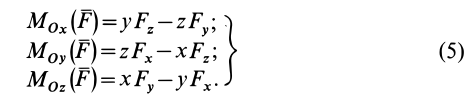
Из равенства (42) следует, что проекции линейного момента силы  на координатные оси х, у и z представляют собой момент силы Р относительно осей х, у и z.
на координатные оси х, у и z представляют собой момент силы Р относительно осей х, у и z.
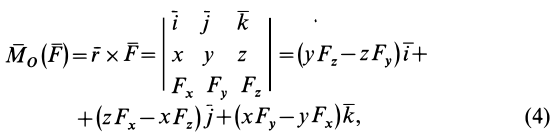
Линейный момент М может быть выражен по формуле (4) через компоненты:

Величины  можно определить, пользуясь равенствами (42) и (5) или (40а) и (11):
можно определить, пользуясь равенствами (42) и (5) или (40а) и (11):

где  — проекции радиуса вектора
— проекции радиуса вектора  на координатные оси, или, что все равно, координаты точки приложения силы;
на координатные оси, или, что все равно, координаты точки приложения силы;
 — проекции силы Р на координатные оси;
— проекции силы Р на координатные оси;
 — углы, которые образует вектор М с координатными осями.
— углы, которые образует вектор М с координатными осями.
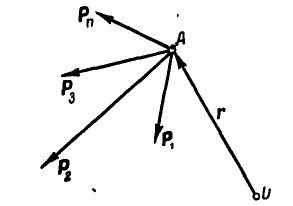
Если на точку А (рис. 102) действуют силы 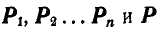 — их равнодействующая, то
— их равнодействующая, то

Умножая векторно обе части равенства на радиус-вектор  , проведенный из любой точки О в точку приложения сил А, имеем:
, проведенный из любой точки О в точку приложения сил А, имеем:

или 
т. е. момент равнодействующей сил, линии действия которых пересекаются в точке, относительно любой точки равен геометрической сумме моментов сил составляющих относительно той же точки.
Проектируя векторное равенство (45) на координатные оси, согласно (42) получаем:
т. е. момент равнодействующей сил, линии действия которых пересекаются в одной точке, относительно какой-либо оси равен алгебраической сумме моментов сил составляющих относительной той же оси.
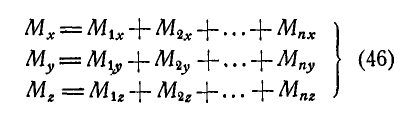
На основании последних равенств формулы (44) могут быть получены непосредственно из чертежа. Для этого представим силу Р (рис. 103), приложенную в точке А, определяемой координатами х, у и z в виде трех составляющих 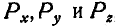 , параллельных координатным осям. Тогда на основании равенств (46) моменты
, параллельных координатным осям. Тогда на основании равенств (46) моменты  силы Р относительно координатных осей найдутся непосредственно из чертежа:
силы Р относительно координатных осей найдутся непосредственно из чертежа:

Задача:
Найти моменты  и
и  силы
силы  относительно осей х, у и z (рис. 104), если сила Р параллельна оси Оу и OA совпадает с
относительно осей х, у и z (рис. 104), если сила Р параллельна оси Оу и OA совпадает с 
Решение. Момент силы Р относительно оси у равен нулю, так как сила Р параллельна оси Оу, т. е.  .
.
Для нахождения момента силы Р относительно оси Ох проектируем силу Р на плоскость yOz, перпендикулярную к оси Ох (проекция Р). Опустив далее из точки О пересечения оси Ох с плоскостью yOz перпендикуляр  на направление проекции
на направление проекции  , имеем:
, имеем:

Аналогично находим, что  . Моменты
. Моменты  и
и  силы Р относительно осей х, у и z можно было бы найти также по формулам (44):
силы Р относительно осей х, у и z можно было бы найти также по формулам (44):

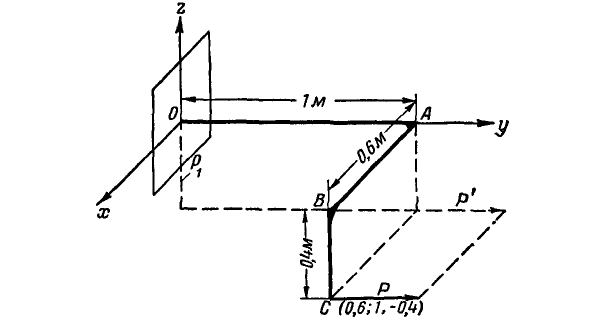
Задача:
Найти линейный момент М силы  относительно точки О, если сила Р направлена по диагонали куба (рис. 106) и
относительно точки О, если сила Р направлена по диагонали куба (рис. 106) и  и
и 
Решение. Проекции силы Р на координатные оси будут:
Так как точка приложения силы  нам известна, то проекции линейного момента М на координатные оси найдутся по формулам (44):
нам известна, то проекции линейного момента М на координатные оси найдутся по формулам (44):

откуда по формуле (43) находим:

Момент силы относительно точки
Для равновесия рычага необходимо и достаточно, чтобы сумма моментов действующих на него сил относительно точки опоры равнялась нулю
Условие равновесия рычага. Твердое тело, имеющее возможность поворачиваться вокруг неподвижной оси под воздействием сил, линии действия которых расположены в плоскостях, перпендикулярных оси вращения, называют рычагом. Пусть рычаг (рис. 27) представляет собой невесомый жесткий стержень. На него действуют только две силы  и
и  , перпендикулярные к рычагу в точках А и В.
, перпендикулярные к рычагу в точках А и В.
Если точка опоры С, т. е. точка пересечения оси вращения с плоскостью чертежа, лежит между линиями действия сил (рис. 27, а), то рычаг называют рычагом первого рода. Рычагом второго рода называют рычаг, в котором точка опоры находится по одну сторону от линий действия сил (рис. 27, б).
Для равновесия рычага необходимо и достаточно, чтобы равнодействующая активных сил и была уравновешена реакцией в точке опоры. Таким образом, равнодействующая сил и должна проходить через точку С, т. е. должно существовать равенство


Будем называть расстояние от точки опоры до линии действия силы плечом силы, а произведение модуля силы на плечо—моментом силы относительно точки опоры С. Момент .мы считаем положительным, если сила стремится повернуть рычаг против вращения стрелок часов, и отрицательным, если сила стремится повернуть плечо в ту же сторону, в какую поворачиваются стрелки часов. Момент силы относительно опоры на левом чертеже положительный, а момент силы – отрицательный.
Таким образом, условие равновесия рычага выразим так: для равновесия рычага необходимо и достатнчно, чтобы сумма моментов сил относительно точки опоры равнялась нулю:
 (13)
(13)
Задача:
Груз G (рис. 28, а) поднимают тросом, перекинутым через блок и намотанным на барабан l лебедки. Барабан лебедки жестко скреплен с зубчатым колесом ll, которое находится в зацеплении с зубчатым колесом lll, жестко скрепленным с рукояткой O3A. Определить силу F, прикладываемую к точке А рукоятки лебедки для равномерного поднятия груза G, в положении, изображенном на чертеже. Даны диаметры: D1, D2, D3. Длина рукоятки O3A=l.
Решение. Лебедку можно рассматривать как состоящую из двух рычагов. Один рычаг (назовем его первым) представляет собой твердое тело, состоящее из барабана l и шестерни ll и имеющее неподвижную ось O1. Другой рычаг—твердое тело, состоящее из шестерни lll и рукоятки O3A и имеющее неподвижную ось O3. Для решения задачи из условия равновесия первого рычага определим давление P3,2 между зубцами шестерен, а зная его, найдем F из условия равновесия второго рычага.
На первый рычаг действуют следующие силы (рис. 28, б): 1) сила натяжения троса, равная весу груза, направленная вверх и стремящаяся повернуть рычаг по ходу часовой стрелки; 2) давление P3,2 зубцов колеса lll на зубцы колеса ll, направленное вверх и поворачивающее первый рычаг против хода часов, и 3) реакция в оси O1.
Момент силы T относительно точки опоры O1 равен —  . Момент силы P3,2 равен
. Момент силы P3,2 равен  . Момент реакции в оси относительно точки O1 равен нулю. Из условия равновесия рычага находим
. Момент реакции в оси относительно точки O1 равен нулю. Из условия равновесия рычага находим

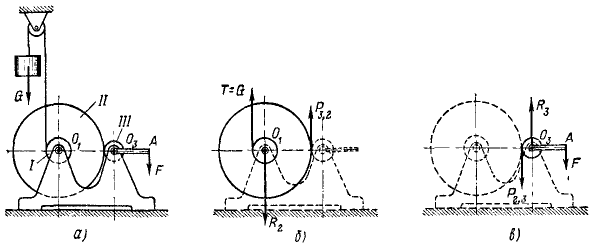
Рис. 28
Ко второму рычагу (рис. 28, в) приложены: I) сила давления зубцов колеса II, равная (по принципу равенства действия и противодействия) P3,2, но направленная вниз и стремящаяся повернуть второй рычаг против хода часов; 2) давление F руки человека, направленное вниз и поворачивающее рычаг по ходу часов, и 3) реакция в оси O3, момент которой относительно O3 равен нулю.
Момент силы P3,2 относительно точки опоры O3 равен  . Момент искомой силы F равен —F∙l. Пo условию равновесия рычага
. Момент искомой силы F равен —F∙l. Пo условию равновесия рычага

Мы выясни ли, что момент силы относительно точки опоры рычага зависит не только от величины силы, но и от ее положения по отношению к точке опоры рычага. Чем дальше от точки опоры лежит линия действия силы, тем больше момент. Если сила не перпендикулярна рычагу (рис. 29), то способность ее поворачивать рычаг вокруг точки опоры мы и в этом случае будем измерять моментом силы, а под плечом будем понимать кратчайшее расстояние от точки опоры до линии действия силы. Пусть сила F приложена к рычагу в точке А и составляет с ним некоторый угол а. Разложим силу на две составляющие, из которых одна (F sin a) перпендикулярна к рычагу, а другая (F cos a) направлена вдоль рычага. Эта вторая составляющая не может повернуть рычаг, а поворачивать его будет только первая составляющая (F sin a) или, как говорят, только эта составляющая создает вращающий момент.
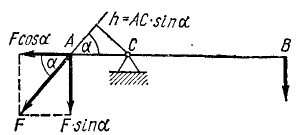
Рис. 29
Следовательно, момент силы F относительно опоры C

Но, как видно из чертежа, АC sin a= h. Называя плечом силы относительно точки длину перпендикуляра, опущенного из точки на линию действия силы, мы находим, что и в этом случае момент равен произведению модуля силы на плечо:
 (14)
(14)
Момент силы относительно точки выражается произведением модуля силы на плечо, взятым со знаком плюс или минус
Момент силы относительно точки. Понятие момента применимо не только к силам, действующим на рычаг, но и к силам, приложенным ко всякому твердому телу. Момент силы может быть определен не только относительно опоры, но и относительно всякой точки. Точку, относительно которой определен момент силы, называют центром момента.
Таким образом, опуская из точки О перпендикуляр на линию действия силы  и умножая модуль силы на длину этого перпендикуляра, получим момент силы F относительно точки О. Знак момента будем определять, руководствуясь следующим правилом: если мысленно, закрепив центр момента и действуя на плечо в направлении силы, будем поворачивать плечо против хода часовой стрелки, то момент силы относительно данного центра положителен, если же по ходу часовой стрелки, то ‘.момент отрицателен.
и умножая модуль силы на длину этого перпендикуляра, получим момент силы F относительно точки О. Знак момента будем определять, руководствуясь следующим правилом: если мысленно, закрепив центр момента и действуя на плечо в направлении силы, будем поворачивать плечо против хода часовой стрелки, то момент силы относительно данного центра положителен, если же по ходу часовой стрелки, то ‘.момент отрицателен.
Так (рис. 30), моменты сил  ,
,  и
и  относительно точки О положительны, а моменты сил
относительно точки О положительны, а моменты сил  и
и  относительно той же точки отрицательны.
относительно той же точки отрицательны.
Одна и та же сила может иметь положительный момент относительно одной точки и отрицательный —относительно другой. Так, момент силы (рис. 31) относительно точки О положителен, а относительно точки C отрицателен.
Рис. 30
Рис. 31
Момент силы относительно начала координат связан с проекциями X и Y силы на оси и с координатами х и у точки ее приложения соотношением M0=xY-yX.
Аналитическое выражение момента силы.
Пусть дана сила (рис. 32), направление которой составляет с осями координат углы αF и βF. Направляющие косинусы этой силы
 ;
;
 .
.
Проведем вектор  из начала координат в точку приложения силы. Этот вектор называют радиусом-вектором. Если координаты точки приложения силы обозначить через х и у, то, как видно из чертежа,
из начала координат в точку приложения силы. Этот вектор называют радиусом-вектором. Если координаты точки приложения силы обозначить через х и у, то, как видно из чертежа,
 ;
;
 .
.
Плечо силы h относительно точки О определим из △OAN:
h = r sin δ.
И для определения величины момента силы получаем следующую формулу:
M0= r Fsin δ. (15)
Угол δ как внутренний угол ΔOAK равен внешнему aF без другого внутреннего, с ним не смежного—ar, поэтому
Подставляя сюда, а затем в (15) найденные выше значения тригонометрических величин, получим 
M0= хY – yX 1 . (16)
Определяя момент силы по формуле (16), нет надобности определять его знак, сообразуясь с ходом часовой стрелки, т. к. знак получается непосредственно из формулы в зависимости от знаков χ, y, X, Y. В нашем курсе формуле (16) уделена значительная роль.
Момент силы относительно точки выражается векторным произведением радиуса-вектора точки приложения силы на вектор силы: 
Момент силы относительно точки как вектор
Напомним, что векторным произведением  на
на  называют вектор
называют вектор  направленный перпендикулярно к a и b согласно «правилу буравчика», а по модулю равный произведению модулей a и b на синус угла между направлениями этих векторов.
направленный перпендикулярно к a и b согласно «правилу буравчика», а по модулю равный произведению модулей a и b на синус угла между направлениями этих векторов.
Следовательно, как видно из (15), величина момента силы равна модулю векторного произведения радиуса-вектора  на вектор силы
на вектор силы  Момент силы относительно точки О как вектор можно представить:
Момент силы относительно точки О как вектор можно представить:
 (17)
(17)
Вектор  не изображен на рис. 32, потому что он направлен перпендикулярно к плоскости, в которой лежат векторы и , т. е. в данном случае перпендикулярно плоскости чертежа. Если же изобразить силу не в плоскости чертежа, а в трехмерном пространстве, то момент силы относительно точки О надо отложить от точки О перпендикулярно к плоскости, составляемой радиусом-вектором и вектором силы. Удобна следующая геометрическая интерпретация (рис. 33). Обозначив буквами А и В начало и конец вектора силы, получим треугольник OAB, площадь которого равна половине произведения основания AB на высоту h = OA sin δ.
не изображен на рис. 32, потому что он направлен перпендикулярно к плоскости, в которой лежат векторы и , т. е. в данном случае перпендикулярно плоскости чертежа. Если же изобразить силу не в плоскости чертежа, а в трехмерном пространстве, то момент силы относительно точки О надо отложить от точки О перпендикулярно к плоскости, составляемой радиусом-вектором и вектором силы. Удобна следующая геометрическая интерпретация (рис. 33). Обозначив буквами А и В начало и конец вектора силы, получим треугольник OAB, площадь которого равна половине произведения основания AB на высоту h = OA sin δ.
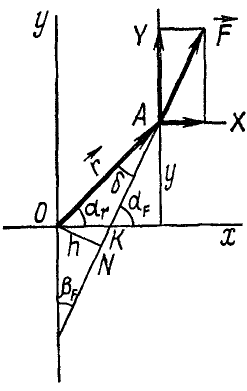
Рис. 32
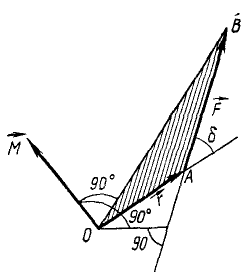
Рис. 33
Сравнивая это равенство с (14), найдем, что момент силы  относительно точки О численно равен удвоенной площади треугольника OAB. Напомним, что отрезок AB выражен в единицах силы, а потому площадь треугольника OAB выражается не в единицах площади, а в единицах момента силы (ед. силы × ед. длины):
относительно точки О численно равен удвоенной площади треугольника OAB. Напомним, что отрезок AB выражен в единицах силы, а потому площадь треугольника OAB выражается не в единицах площади, а в единицах момента силы (ед. силы × ед. длины):
M0 = 2 пл. ΔOAB 1
Вектор момента направлен от точки О перпендикулярно к плоскости OAB в такую сторону, с которой вектор силы AB представляется поворачивающим треугольник OAB вокруг точки О против хода часов. По модулю он равен (в некотором выбранном масштабе) удвоенной площади треугольника OAB.
Если вектор силы AB переместить вдоль линии действия силы в пределах абсолютно твердого тела, к которому сила AB приложена, оставив точку О неизменной, то вектор момента не изменится, так как не изменятся плоскость и площадь треугольника OAB. Сила является вектором скользящим, и действие силы, а следовательно, и ее момент не изменяются при перенесении силы вдоль линии действия. Напротив, если мы переменим точку О, то положение и площадь треугольника OAB, вообще говоря, изменятся, а следовательно, изменится и момент силы. Поэтому момент силы относительно какой-либо точки О является вектором прикрепленным, он приложен к точке О и переносить его в какое-либо другое место тела нельзя.
Выражение момента силы относительно точки в виде вектора вполне соответствует физической сущности этого понятия, и если силы расположены в различных плоскостях, то моменты сил относительно точки складывают по правилу параллелограмма. Только при рассмотрении системы сил, расположенных в одной плоскости, можно игнорировать направление вектора момента, а учитывать его величину и знак, т. е. определять момент по формулам (14), (15) или (16). В такой системе, когда все силы и центр моментов расположены в одной плоскости, векторы моментов различных сил относительно какой-либо точки О направлены от точки О перпендикулярно к этой плоскости в ту или другую сторону, и в этом случае их складывают алгебраически.
Момент равнодействующей равен сумме моментов составляющих
Теорема Вариньона
Пусть даны пространственный пучок сил  ,
,  , .
, .  (рис. 34) и равнодействующая
(рис. 34) и равнодействующая  этого пучка. Возьмем где-либо совершенно произвольно точку О, проведем радиус вектор
этого пучка. Возьмем где-либо совершенно произвольно точку О, проведем радиус вектор  из точки О в точку приложения сил пучка, определим момент каждой силы относительно точки О и сложим эти моменты:
из точки О в точку приложения сил пучка, определим момент каждой силы относительно точки О и сложим эти моменты:


Заменяя согласно (1) геометрическую сумму всех сил сходящейся системы их равнодействующей, получим
 (18)
(18)
Словами это равенство можно прочитать так: момент равнодействующей системы сходящихся сил относительно какой-либо точки равен сумме моментов всех сил относительно той же точки. Момент
силы относительно точки есть вектор, поэтому сумма является геометрической. В частном случае, если все силы и центр моментов лежат в одной плоскости, то все векторы моментов направлены по одной прямой, перпендикулярной к этой плоскости, и геометрическое сложение моментов сил заменяется алгебраическим.
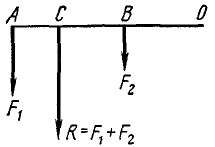
Рис. 35
Таким образом, момент равнодействующей плоской системы сходящихся сил равен алгебраической сумме моментов составляющих. Теорема Вариньона о моменте равнодействующей справедлива не только для пучка сил, ио для всякой системы сил, имеющей равнодействующую. Так, например, момент равнодействующей R двух параллельных сил F1 и F2 относительно произвольной точки О (рис. 35) равен:
что и требовалось доказать. Методом от n к n+1 нетрудно показать справедливость теоремы Вариньона для любого числа сил.
Момент силы относительно оси
Чтобы определить момент силы относительно оси, нужно спроецировать силу на плоскость, перпендикулярную к оси, и затем определить момент проекции силы относительно точки пересечения оси и плоскости
Момент силы относительно оси. Ознакомление с понятием момента силы относительно оси, имеющим большое значение, начнем с конкретного примера. Дверь (рис. 36) может поворачиваться вокруг оси. Механическое воздействие силы  , поворачивающей дверь, зависит не только от величины, но и от положения вектора силы по отношению к оси. Разложим силу
, поворачивающей дверь, зависит не только от величины, но и от положения вектора силы по отношению к оси. Разложим силу  на две составляющие, из которых одну
на две составляющие, из которых одну  направим параллельно осн, а другую (
направим параллельно осн, а другую ( ) расположим в плоскости, перпендикулярной к оси. Очевидно, что составляющая, параллельная оси, поворачивать дверь не будет, действие же составляющей, расположенной в плоскости, перпендикулярной к оси, зависит не только от ее величины Р, но и от кратчайшего расстояния между линией действия этой составляющей и осью. Иначе говоря, действие силы на закрепленную на оси дверь характеризуется моментом составляющей (расположенной в плоскости, перпендикулярной к оси) относительно точки пересечения оси и плоскости.
) расположим в плоскости, перпендикулярной к оси. Очевидно, что составляющая, параллельная оси, поворачивать дверь не будет, действие же составляющей, расположенной в плоскости, перпендикулярной к оси, зависит не только от ее величины Р, но и от кратчайшего расстояния между линией действия этой составляющей и осью. Иначе говоря, действие силы на закрепленную на оси дверь характеризуется моментом составляющей (расположенной в плоскости, перпендикулярной к оси) относительно точки пересечения оси и плоскости.
Установим теперь общее правило определения момента силы относительно оси.
Чтобы определить момент силы относительно оси, нужно эту силу спроецировать на перпендикулярную к оси плоскость и определить момент проекции силы относительно точки пересечения оси и плоскости. Момент силы относительно оси — скалярная величина, потому что у него нет собственного направления, а «направлен» он по оси в ту или иную сторону, т. е. определяется величиной и знаком и, конечно, направлением оси.
Где именно проведена перпендикулярная к оси плоскость, не имеет значения, так как проекции силы на параллельные плоскости и плечи проекций силы во всех случаях одни и те же.
Если сила параллельна оси или пересекает ось, то момент силы относительно оси равен нулю. Эти два случая можно объединить в один: момент силы относительно оси равен нулю, если сила и ось лежат в одной плоскости.
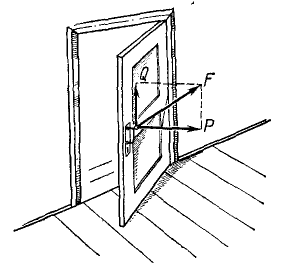
Рис. 36
Момент силы относительно оси равен проекции на эту ось момента силы относительно какой-либо точки, взятой на оси
Покажем, что момент силы относительно оси равен проекции на данную ось вектора момента силы относительно какой-либо точки той же оси.
Возьмем на оси zz’ произвольную точку О (рис. 37) и определим момент силы  относительно этой точки. Момент
относительно этой точки. Момент  силы
силы  относительно точки О выражается вектором, по модулю равным удвоенной площади треугольника OAB и приложенным в точке О перпендикулярно к плоскости Δ OAB.
относительно точки О выражается вектором, по модулю равным удвоенной площади треугольника OAB и приложенным в точке О перпендикулярно к плоскости Δ OAB.
Проведем через точку О плоскость, перпендикулярную к оси. Чтобы определить момент Mz силы относительно оси, спроецируем силу на эту плоскость и определим момент проекции  относительно точки пересечения оси и плоскости, т. е. относительно точки О. Этот момент численно равен удвоенной площади треугольника Oab и направлен перпендикулярно к Oab, т. е. по оси zz’.
относительно точки пересечения оси и плоскости, т. е. относительно точки О. Этот момент численно равен удвоенной площади треугольника Oab и направлен перпендикулярно к Oab, т. е. по оси zz’.
Но Δ Oab является проекцией Δ OAB на плоскость, перпендикулярную к оси. Площадь проекции равна площади проецируемой фигуры, умноженной на косинус двугранного угла между плоскостями, измеряемого линейным углом между перпендикулярами к этим плоскостям, т. е. 
Спроецировав на ось момент силы относительно точки О и принимая во внимание это равенство, найдем, что численно
 (19)
(19)
При решении задач особенно часто приходится определять моменты сил относительно координатных осей. Согласно только что доказанному момент силы относительно какой-либо из осей координат равен проекции на эту ось момента сил относительно любой точки этой оси, в частности относительно точки О начала координат:
 (20)
(20)
где cosaM, cosβM и CosγM-направляющие косинусы вектора момента силы относительно начала координат.
Если момент относительно оси умножим на единичный вектор этой оси, то получим не проекцию, а составляющую момента относительно точки, не скалярную, а векторную величину:
 (21)
(21)
Из равенств (20) и (21) непосредственно получаем
 (22)
(22)
 (22 / )
(22 / )
Аналитические выражения моментов силы относительно осей координат. Выразим моменты силы относительно осей координат через координаты точки приложения силы и проекции силы на координатные оси.
На чертеже (рис. 38) изображены оси координат и составляющие силы, приложенной к точке А (xyz) (сама сила на чертеже не показана). Чтобы определить моменты силы относительно оси Ох, нужно сначала спроецировать силу  на плоскость yОz. Проекция равнодействующей равна сумме проекций составляющих, и вместо того, чтобы спроецировать силу
на плоскость yОz. Проекция равнодействующей равна сумме проекций составляющих, и вместо того, чтобы спроецировать силу  , мы можем спроецировать ее составляющие. Проекция составляющей
, мы можем спроецировать ее составляющие. Проекция составляющей  равна нулю, проекции же составляющих
равна нулю, проекции же составляющих  и
и  равны этим составляющим.
равны этим составляющим.
Теперь нам остается определить алгебраическую сумму моментов этих проекций относительно точки О, которая по теореме Вариньона равна моменту проекции равнодействующей на плоскость yОz, или, что то же, моменту силы относительно оси Ох. Так мы получаем первую из формул (23). Аналогично можно доказать две другие формулы (23), выражающие моменты силы относительно осей Oy и Oz:
 (23)
(23)
Для вывода формул (23) мы выбрали точку приложения силы в первом октанте (х, у и z положительны) и направили силу от начала координат (X, Y и Z положительны). Если координаты или проекции силы отрицательны, то в формулы (23) надо, конечно, подставить отрицательные значения.
Достаточно запомнить одну из формул (23), а следующую можно получить из предыдущей, применив круговую подстановку, т. е. заменив всюду икс на игрек, игрек на зет и зет на икс. Случаи, когда формулы можно получить одну из другой такой подстановкой, мы будем отмечать символом: 
Выражение (23) можно получить непосредственно из свойств векторного произведения, если представить векторное произведение определителем третьего порядка:
 (17 / )
(17 / )
Раскладывая этот определитель по элементам первой строки, найдем: 

Сравнив это равенство с (22′), получим формулы (23).
Обратим внимание на то, что правая часть третьей из формул (23) тождественна выражению (16) момента силы, лежащей в плоскости хОу, относительно начала координат. Объяснение заключается в том, что при выводе формулы (23) для определения Мz силу сначала спроецировали на плоскость хОу и затем определили момент проекции относительно начала координат. Формула же (16) выражает момент относительно начала координат силы, лежащей в плоскости хОу. Моменты этой силы относительно осей, расположенных с ней в одной плоскости, равны нулю (Mx= 0, My= 0), а момент относительно оси Oz численно равен величине момента относительно начала координат (Mz = M0).
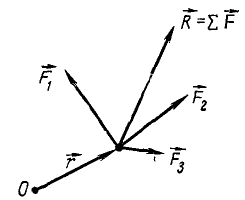
Рис. 34
| Рекомендую подробно изучить предмет: |
|
| Ещё лекции с примерами решения и объяснением: |
- Теория пар, не лежащих в одной плоскости
- Произвольная пространственная система сил
- Центр параллельных сил и центр тяжести
- Поступательное движение твердого тела
- Равновесие системы, состоящей из нескольких тел
- Графостатика в теоретической механике
- Расчет ферм
- Пространственная система сходящихся сил
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Законы сложения сил в механике
При воздействии на одно тело нескольких сил одновременно тело начинает двигаться с ускорением, являющимся векторной суммой ускорений, которые бы возникли под воздействием каждой силы по отдельности. К действующим на тело силам, приложенным к одной точке, применяется правило сложения векторов.
Векторная сумма всех сил, одновременно воздействующих на тело, это сила равнодействующая, которая определяется по правилу векторного сложения сил:
R → = F 1 → + F 2 → + F 3 → + . . . + F n → = ∑ i = 1 n F i → .
Равнодействующая сила действует на тело также, как и сумма всех действующих на него сил.
Правило параллелограмма и правило многоугольника
Для сложения 2 -х сил используют правило параллелограмма (рисунок 1 ).
Рисунок 1 . Сложение 2 -х сил по правилу параллелограмма
Выведем формулу модуля равнодействующей силы с помощью теоремы косинусов:
R → = F 1 → 2 + F 2 → 2 + 2 F 1 → 2 F 2 → 2 cos α
При необходимости сложения более 2 -х сил используют правило многоугольника: от конца
1 -й силы необходимо провести вектор, равный и параллельный 2 -й силе; от конца 2 -й силы необходимо провести вектор, равный и параллельный 3 -й силе и т.д.
Рисунок 2 . Сложение сил правилом многоугольника
Конечный вектор, проведенный от точки приложения сил в конец последней силы, по величине и направлению равняется равнодействующей силе. Рисунок 2 наглядно иллюстрирует пример нахождения равнодействующей сил из 4 -х сил: F 1 → , F 2 → , F 3 → , F 4 → . Причем суммируемые векторы совсем необязательно должны быть в одной плоскости.
Результат действия силы на материальную точку будет зависеть только от ее модуля и направления. У твердого тела есть определенные размеры. Потому силы с одинаковыми модулями и направлениями вызывают разные движения твердого тела в зависимости от точки приложения.
Линией действия силы называют прямую, проходящую через вектор силы.
Рисунок 3 . Сложение сил, приложенных к различным точкам тела
Если силы приложены к различным точкам тела и действуют не параллельно по отношению друг к другу, тогда равнодействующая приложена к точке пересечения линий действия сил (рисунок 3 ). Точка будет находиться в равновесии, если векторная сумма всех сил, действующих на нее, равняется 0 : ∑ i = 1 n F i → = 0 → . В данном случае равняется 0 и сумма проекций данных сил на любую координатную ось.
Разложение вектора силы по направлениям
Разложение сил на две составляющие – это замена одной силы 2 -мя, приложенными в той же точке и производящими на тело такое же действие, как и эта одна сила. Разложение сил осуществляется, как и сложение, правилом параллелограмма.
Задача разложения одной силы (модуль и направление которой заданы) на 2 , приложенные в одной точке и действующие под углом друг к другу, имеет однозначное решение в следующих случаях, когда известны:
- направления 2 -х составляющих сил;
- модуль и направление одной из составляющих сил;
- модули 2 -х составляющих сил.
Пример 1
Необходимо разложить силу F на 2 составляющие, находящиеся в одной плоскости с F и направленные вдоль прямых a и b (рисунок 4 ). Тогда достаточно от конца вектора F провести 2 прямые, параллельные прямым a и b . Отрезок F A и отрезок F B изображают искомые силы.
Рисунок 4 . Разложение вектора силы по направлениям
Второй вариант данной задачи – найти одну из проекций вектора силы по заданным векторам силы и 2 -й проекции (рисунок 5 а ).
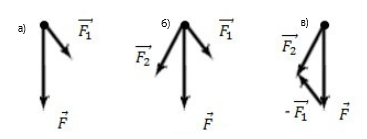
Рисунок 5 . Нахождение проекции вектора силы по заданным векторам
Во втором варианте задачи необходимо построить параллелограмм по диагонали и одной из сторон, как в планиметрии. На рисунке 5 б изображен такой параллелограмм и обозначена искомая составляющая F 2 → силы F → .
Итак, 2 -й способ решения: прибавим к силе силу, равную – F 1 → (рисунок 5 в ). В итоге получаем искомую силу F → .
Три силы F 1 → = 1 Н ; F 2 → = 2 Н ; F 3 → = 3 Н приложены к одной точке, находятся в одной плоскости (рисунок 6 а ) и составляют углы с горизонталью α = 0 ° ; β = 60 ° ; γ = 30 ° соответственно. Необходимо найти равнодействующую силу.
Решение
Рисунок 6 . Нахождение равнодействующей силы по заданным векторам
Нарисуем взаимно перпендикулярные оси О Х и O Y таким образом, чтобы ось О Х совпадала с горизонталью, вдоль которой направлена сила F 1 → . Сделаем проекцию данных сил на координатные оси (рисунок 6 б ). Проекции F 2 y и F 2 x отрицательны. Сумма проекций сил на координатную ось О Х равняется проекции на данную ось равнодействующей: F 1 + F 2 cos β – F 3 cos γ = F x = 4 – 3 3 2 ≈ – 0 , 6 Н .
Точно также для проекций на ось O Y : – F 2 sin β + F 3 sin γ = F y = 3 – 2 3 2 ≈ – 0 , 2 Н .
Модуль равнодействующей определим с помощью теоремы Пифагора:
F = F x 2 + F y 2 = 0 , 36 + 0 , 04 ≈ 0 , 64 Н .
Направление равнодействующей найдем при помощи угла между равнодействующей и осью (рисунок 6 в ):
t g φ = F y F x = 3 – 2 3 4 – 3 3 ≈ 0 , 4 .
Сила F = 1 к Н приложена в точке В кронштейна и направлена вертикально вниз (рисунок 7 а ). Необходимо найти составляющие данной силы по направлениям стержней кронштейна. Все необходимые данные отображены на рисунке.
Решение
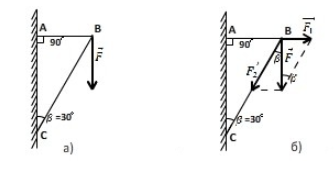
Рисунок 7 . Нахождение составляющих силы F по направлениям стержней кронштейна
Дано:
F = 1 к Н = 1000 Н
Пускай стержни прикручены к стене в точках А и С . На рисунке 7 б изображено разложение силы F → на составляющие вдоль направлений А В и В С . Отсюда понятно, что
F 1 → = F t g β ≈ 577 Н ;
F 2 → = F cos β ≈ 1155 Н .
Ответ: F 1 → = 557 Н ; F 2 → = 1155 Н .
[spoiler title=”источники:”]
http://www.evkova.org/moment-silyi-otnositelno-tochki-i-otnositelno-osi-v-teoreticheskoj-mehanike
http://zaochnik.com/spravochnik/fizika/elementy-statiki/zakony-slozhenija-sil-v-mehanike/
[/spoiler]
Связь между моментами силы относительно оси и произвольной точки этой оси
Пусть даны сила
![]() и осьl.
и осьl.
Возьмем произвольную точку О на оси l
и найдем вектор
![]() (рис. 2.5). Обозначим γ угол, который
(рис. 2.5). Обозначим γ угол, который
составляет вектор![]() с осьюl.
с осьюl.
Возьмем другую точку
![]() на осиl
на осиl
и проводим через нее плоскость П
перпендикулярную оси l.
Спроектируем силу
![]() на плоскость П. Из геометрии известно,
на плоскость П. Из геометрии известно,
что если нормали к двум плоскостям
составляют угол γ, то и плоскости
составляют этот угол и для площадей
треугольников справедлива формула:
![]() .
.
(2.8)
Д омножим
омножим
формулу (2.8) на два:
![]() .
.
(2.9)
В формуле (2.9)
![]() ,
,
![]() .
.
Следовательно
![]() или
или
![]() .
.
Рис.
2.5
Момент силы
относительно оси равен проекции на эту
ось момента силы относительно любой
точки этой оси.
Главный вектор системы сил
Пусть дана система
сил
![]() .
.
Определение.
Главным
вектором системы сил называется вектор,
равный геометрический сумме векторов
всех сил системы
![]() .
.
(2.10)
Главный вектор
не является силой. Это свободный вектор,
полученный формальным сложением,
перенесенных в любую точку векторов
сил системы (рис. 2.6).
Способ нахождения главного вектора системы сил
Выберем некоторую
систему координат Oxyz.
По отношению к этой системе координат
силы можно разложить по ортам
![]() :
:
![]() ,
,
![]() ,
,
![]() .
.
(2.11)
По определению
![]() .
.
(2.12)

Рис. 2.6
С другой стороны
![]() .
.
(2.13)
Сравнивания формулы
(3.12) и (3.13), определяем проекции главного
вектора системы сил на оси Ox,
Оy,
Оz:
![]() ,
,
![]() ,
,![]() .
.
Тогда по модулю
![]() .
.
(2.14)
Направление
главного вектора системы сил определяется
направляющими векторами:
![]() ,
,
![]() ,
,![]() (2.15)
(2.15)
Главный вектор
всегда можно найти, в отличие от
равнодействующей.
Пример.
Силы
![]() и
и![]() не пересекаются в одной точке,
не пересекаются в одной точке,
следовательно, не эквивалентны одной
силе, то есть равнодействующей.
Главный вектор
![]() можно взять в любой точке, напримерО
можно взять в любой точке, напримерО
(рис.2.7).
 Рис.
Рис.
2.7
Главный момент системы сил
Пусть имеем систему
сил, действующую на материальный объект
![]() .
.
Выберем также произвольную, фиксированную
точкуО.
Определение.
Главным
моментом системы сил относительно
некоторой точки О является приложенный
в этой точке вектор, равным геометрической
сумме моментов всех сил системы
относительно этой точки
![]() .
.
(2.16)
Способ вычисления главного момента системы сил
В точке О
выберем систему координат (рис.2.8).
Разложим силы и главный момент системы
сил относительно точки О
по ортам
![]() ,
,
![]() .
.
![]() .
.
(2.17)
По определению
 (2.18)
(2.18)

Рис. 2.8
Сравнивая формулы
(2.17) и (2.18), получим
![]() ,
,
![]() ,
,
![]() .
.
Тогда модуль
главного момента системы сил равен
![]() .
.
Направление
главного момента определится направляющими
косинусами
 ,
, ,
, .
.
Главный момент
системы сил существенным образом зависит
от выбора точки О,
в отличие от главного вектора, который
от выбора точки О
не зависит.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
В задачах динамики учитывают силы, действующие на тело. Векторы сил могут действовать в различных направлениях. Большинство школьных задач можно решить, располагая векторы сил в одной плоскости. Поэтому, в статье будем рассматривать векторы, лежащие в одной плоскости — компланарные векторы.
Что такое равнодействующая
Равнодействующий вектор – это вектор, который мы получаем, когда складываем несколько векторов сил.
Результат сложения может дать:
- вектор, имеющий длину,
- или вектор, не имеющий длины.
Примечание: Когда у вектора отсутствует длина, говорят, что вектор равен нулю. На рисунке нулевой вектор можно изобразить одной точкой. Длины у точки нет – т. е. длина нулевая, а направление может быть любым.
Длина вектора содержит сумму квадратов всех его проекций на оси.
В частности, для вектора ускорения (vec{a}), лежащего на плоскости xOy, длина вычисляется так
[ large left| vec{a} right| = sqrt{ a_{x}^{2} + a_{y}^{2}} ]
Где ( a_{x} ) и ( a_{y} ) — это проекции вектора (ссылка) ( vec{a} ) на оси Ox и Oy.
Когда вектор равен нулю, равна нулю каждая его проекция на осях.
Длина вектора отлична от нуля, когда хотя бы одна его проекция ненулевая.
Прочитайте подробнее о параметрах векторов.
Левая часть силового уравнения
В левой части силового уравнения записываем силы, действующие на тело.
Когда векторы сил направлены вдоль параллельных прямых, проводим на рисунке одну ось. Если векторы сил не параллельные, проводим две оси на плоскости. Раскладываем векторы на проекции по осям. Для каждой оси составляем отдельное уравнение. Количество уравнений совпадает с количеством осей.
Если сила сонаправлена с осью, то она войдет в левую часть уравнения со знаком «+», а если она направлена против оси — то со знаком «минус».
Правая часть силового уравнения
В правой части уравнения записываем равнодействующую. В задаче может присутствовать несколько осей, вдоль каждой оси направляем отдельную проекцию равнодействующей.
Примечание: Тело может вдоль одной оси двигаться с ускорением, а вдоль другой оси двигаться без ускорения, или, вообще, покоиться. Например, тело может двигаться по вертикали под действием силы тяжести, а по горизонтали при этом не смещаться.
Когда проекция равнодействующей вдоль какой-либо оси не равна нулю, тело по оси будет двигаться с ускорением. Это следует из второго закона Ньютона.
Тогда в правой части уравнения запишем:
- (ma), если ускорение направлено туда же, куда направлена ось;
- (- ma), если ускорение направлено противоположно оси;
А когда проекция равнодействующей на ось нулевая, ускорение вдоль оси отсутствует. Тогда вдоль этой оси тело движется с неизменной скоростью, или же, вдоль этой оси движение отсутствует. Это следует из первого закона Ньютона.
В правой части уравнения запишем ноль (0 = ускорения нет).
Векторы сил параллельны
В случае, когда векторы направлены вдоль одной прямой, достаточно выбрать и провести единственную ось.
Выясним, как выглядит силовое уравнение для задачи, в которой векторы сил направлены вдоль единственной оси. Например, парашютист спускается вертикально вниз (рис. 1) на парашюте под действием силы тяжести.

Рис. 1. Парашютист спускается на парашюте, векторы сил направлены вдоль единственной оси
Проведем на рисунке ось, направим ее вверх.
Примечание: Мы можем направить ось вниз, если захотим. При таком направлении оси знаки проекций векторов изменятся на противоположные, но на конечный ответ это никак не повлияет.
Составим левую часть уравнения. В левой части мы запишем силы, действующие на парашютиста:
[large F_{text{сопр}} — m cdot g ]
Сила ( F_{text{сопр}}) направлена по оси, поэтому войдет в уравнение со знаком «+». А сила ( m cdot g ) вошла в уравнение со знаком «минус», так как направлена против оси.
В правую часть уравнения поместим равнодействующую.
Размеры парашюта рассчитаны так, что парашютист опускается вниз с постоянной (неизменной, т. е. одной и той же) скоростью. Значит, скорость есть, она не меняется, ускорения нет.
Математики запишут, что ускорение есть, но оно – нулевое (vec{a}=0).
То есть, вдоль вертикальной оси тело движется без ускорения, значит, силы компенсировались. По первому закону Ньютона, равнодействующая равна нулю и, в правой части уравнения запишем ноль.
Примечания:
- На рисунке 1 скорость обозначена красным вектором, направленным вниз и обозначенным, как (vec{v_{0}}). Обычно математики дописывают нижний индекс к величине, которая не должна меняться. Так как у вектора скорости этот индекс есть, скорость считаем неизменной.
- На рисунке векторы скоростей и ускорений нужно рисовать отдельно от векторов сил! Решая задачу, мы будем складывать векторы (ссылка), имеющие одинаковую размерность. Силы измеряют в Ньютонах, поэтому их можно складывать. А ускорения и скорости измеряют в других единицах, с Ньютонами их сложить не получится. Именно поэтому, чтобы не запутаться, ускорения и скорости рисуем на небольшом расстоянии от тела, отдельно от векторов сил.
Итоговое силовое уравнение имеет вид:
[large F_{text{сопр}} — m cdot g = 0 ]
Зная массу парашютиста, можно вычислить силу сопротивления воздуха. А зная эту силу, можно рассчитать и размеры парашюта.
Векторы сил не параллельны
Когда векторы направлены вдоль разных прямых, будем проводить две взаимно перпендикулярные оси на плоскости.
Разберем задачу равнозамедленного движения тела по горизонтальной шероховатой поверхности (рис. 2).

Рис. 2. Равнозамедленное движения тела по горизонтальной шероховатой поверхности
Поверхность шероховатая, это намек на то, что есть сила трения. А если в условии напишут, что поверхность гладкая, значит, силы трения нет.
Движение равнозамедленное (ссылка), значит, скорость тела уменьшается и есть вектор ускорения, который направлен против вектора скорости.
Нарисуем взаимно перпендикулярные оси. Ось Ox проведем горизонтально, а ось Oy – вертикально. Рассмотрим оси и проекции векторов на них по очереди.
Горизонтальная ось. Пусть движение тела происходит в положительном направлении оси Ox. Сила трения всегда направлена против движения, поэтому направим ее влево. Скорость тела направлена вправо и будет уменьшаться, значит, ускорение, так же, направим влево. Вектор ускорения рисуем отдельно от векторов сил.
Наличие ускорения говорит о том, что вдоль оси Ox равнодействующая имеет не нулевую проекцию. Ускорение направлено против оси, запишем (- ma) в правой части уравнения.
Так выглядит уравнение для горизонтальной оси
[large -F_{text{трен}} = -m cdot a_{x} ]
Вертикальная ось. Вниз направлена сила тяжести, а вверх – сила реакции опоры. Так как поверхность горизонтальная и тело не движется ни вверх, ни вниз, то движения вдоль оси Oy нет. Значит, сила тяжести и реакция опоры компенсировались и нет ускорения вдоль оси Oy. В правой части уравнения для вертикальной оси запишем ноль.
Для вертикальной оси уравнение выглядит так:
[large N — m cdot g = 0 ]
Система, пригодная для решения задачи, состоит из двух уравнений
[ large boxed{ begin{cases} -F_{text{трен}} = -m cdot a_{x} \ N — m cdot g = 0 end{cases} } ]
Куда направить оси
Разберем равнозамедленное движение тела вверх по наклонной шероховатой плоскости (рис. 3).
Силы, действующие на тело в этой задаче, не параллельные, направлены вдоль разных прямых. Поэтому для составления уравнений нужно использовать две взаимно перпендикулярные оси. Попробуем для начала провести ось Oy вертикально, а ось Ox горизонтально.

Рис. 3. Большая часть векторов не лежит на осях, такие векторы придется раскладывать на проекции, чтобы составить силовые уравнения
Из рисунка 3 видно, вдоль оси направлен только один вектор (mg). Остальные векторы сил не параллельны ни одной из осей. Такие векторы придется раскладывать на проекции, это усложнит конечную систему уравнений.
Если выберем оси так, как показано на рисунке 3, на проекции нужно будет разложить три вектора.
Попробуем теперь провести оси так, чтобы как можно большее количество векторов оказались параллельными осям (рис. 4). Из рисунка видно, что только один вектор (mg) окажется ненаправленным вдоль какой-либо оси. Остальные векторы сил параллельны осям.

Рис. 4. Большая часть векторов лежит на осях, раскладывать на проекции нужно только один вектор, силовые уравнения будут иметь простой вид
При таком выборе осей раскладывать на проекции придется только один вектор. Это позволит быстрее решить задачу и решать более простые уравнения.
Примечание: Если мы выбререм оси так, как это представлено на рисунке 3, получим более сложные уравнения. Но решив их, мы получим точно такой же ответ, как и в случае выбора осей на рисунке 4.
Выводы:
- Выбор осей на конечный результат не влияет! А влияет только на сложность полученных уравнений.
- Оси проводим так, чтобы как можно больше векторов оказались направленными вдоль осей.
Движение по наклонной плоскости
Составим систему уравнений для решения такой задачи:
Велосипедист подъезжает с начальной скоростью к подъему, посыпанному песком и, едет в гору на велосипеде по инерции, не крутя педали. Масса велосипедиста с велосипедом, начальная скорость его, коэффициент сопротивления поверхности и угол наклона известны.
Нужно составить систему силовых уравнений, чтобы найти ускорение велосипедиста. А после, зная начальную скорость и ускорение, найти путь, который велосипедист сможет проехать по инерции в горку.
Выражение для ускорения
Составим рисунок, на котором изобразим силы, действующие на велосипедиста (рис. 5)

Рис. 5. Велосипедист едет в гору по инерции, отмечены силы, действующие на велосипедиста, видно, что при таком выборе осей необходимо разложить вектор mg на проекции
Мы провели оси так, чтобы пришлось разложить на проекции только один вектор и система силовых уравнений оказалась достаточно простой.
Пользуясь осями координат, составляем теперь уравнения в проекциях.
Уравнение для проекций векторов на ось Ox:
[ large — F_{text{трен}} – m cdot g_{x} = — m cdot a ]
Уравнение для проекций векторов на ось Oy:
[ large N – m cdot g_{y} = 0 ]
Разложим теперь силу тяжести — вектор (mg) на проекции. Чтобы проделать это разложение, нужно отметить угол (alpha ) межу вектором (mg) и одной из осей. В нашем случае, это угол между вектором (mg) и осью Oy.
[ large begin{cases} m cdot g_{y} = mg cdot cos left(alpha right) \ m cdot g_{x} = mg cdot sin left(alpha right) end{cases} ]
Подставив разложение вектора (mg) в уравнения для осей, получим такую систему уравнений
[ large begin{cases} — F_{text{трен}} – mg cdot sin left(alpha right) = — m cdot a \ N – mg cdot cos left(alpha right) = 0 end{cases} ]
Дополним эту систему выражением для силы трения.
[ large F_{text{трен}} = mu cdot N ]
Запишем эти уравнения в систему и выразим из нее уравнение для ускорения.
[ large begin{cases} N = mg cdot cos left(alpha right) \ F_{text{трен}} = mu cdot mg cdot cos left(alpha right) \ mu cdot mg cdot cos left(alpha right) + mg cdot sin left(alpha right) = m cdot a end{cases} ]
Поделим нижнее уравнение системы на массу велосипедиста и запишем окончательно уравнение для ускорения:
[ large mu cdot g cdot cos left(alpha right) + g cdot sin left(alpha right) = a ]
Выражение для пройденного пути
Запишем выражения для связи скоростей и пройденного пути. Велосипедист движется по инерции в гору и его скорость уменьшается из-за силы тяжести и силы сопротивления поверхности, посыпанной песком. Когда скорость велосипедиста обратится в ноль, он, проехав часть пути в гору, остановится. Используем систему двух уравнений, она описывает путь при учете уменьшения скорости до нуля:
[ large begin{cases} 0 = v_{0} — a cdot t \ S = v_{0} cdot t — a cdot frac{t^2}{2} end{cases} ]
Получим теперь уравнение для пути, в котором будут присутствовать только начальная скорость и ускорение и, будет отсутствовать время.
[ large begin{cases} t = frac{v_{0}}{a} \ S = v_{0} cdot frac{v_{0}}{a} — a cdot frac{1}{2} cdot frac{v_{0}}{a} cdot frac{v_{0}}{a} end{cases} ]
Упрощенная система для решения задачи теперь включает всего два уравнения
[ large begin{cases} mu cdot g cdot cos left(alpha right) + g cdot sin left(alpha right) = a \ S = v_{0} cdot frac{v_{0}}{a} — frac{v_{0}}{2} cdot frac{v_{0}}{a} end{cases} ]
Подставив в эту систему известные значения начальной (v_{0}) скорости велосипедиста, коэффициент (mu) сопротивления поверхности и угол (alpha) наклона плоскости, сможем посчитать путь, пройденный велосипедистом до его полной остановки.
Содержание:
Моменты силы относительно точки и оси:
Для рассмотрения различных систем сил необходимо ввести понятия алгебраического и векторного моментов силы относительно точки и момента силы относительно оси. Введем эти характеристики действия силы на твердое тело и рассмотрим их свойства.
Алгебраический момент силы относительно точки
При рассмотрении плоской системы сил, приложенных к твердому телу, используется понятие алгебраического момента силы относительно точки.
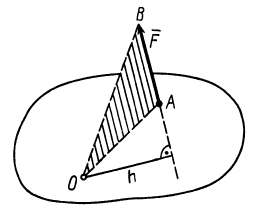
Рис. 19
Алгебраическим моментом силы относительно точки называют произведение модуля силы на плечо силы относительно этой точки (рис. 19), взятое со знаком плюс или минус.
Плечом 
 относительно точки называют кратчайшее расстояние между этой точкой и линией действия силы, т. е. длину отрезка перпендикуляра, опущенного из точки
относительно точки называют кратчайшее расстояние между этой точкой и линией действия силы, т. е. длину отрезка перпендикуляра, опущенного из точки  на линию действия силы
на линию действия силы  .
.
Обозначим  или
или  алгебраический момент силы
алгебраический момент силы  относительно точки . Тогда
относительно точки . Тогда

Если сила стремится вращать тело вокруг моментной точки (точки, относительно которой вычисляют алгебраический момент силы) против часовой стрелки, то берем знак плюс, если по часовой стрелке — знак минус.
Алгебраический момент силы представляет собой произведение силы на длину (в  ).
).
Из определения алгебраического момента силы относительно точки следует, что он не зависит от переноса силы вдоль ее линии действия. Алгебраический момент силы относительно точки равен нулю, если линия действия силы проходит через моментную точку. Сумма алгебраических моментов относительно точки двух равных по модулю, но противоположных по направлению сил, действующих вдоль одной прямой, равна нулю. Численно алгебраический момент относительно точки равен удвоенной площади треугольника, построенного на силе  и моментной точке:
и моментной точке:

Векторный момент силы относительно точки
При рассмотрении пространственной системы сил, приложенных к твердому телу, применяется понятие векторного момента силы относительно точки.
Векторным моментом силы относительно точки называют вектор, приложенный в этой точке и равный по модулю произведению силы на плечо силы относительно этой точки. Векторный момент силы направлен перпендикулярно плоскости, в которой лежат сила и моментная точка, таким образом, что с его конца можно видеть стремление силы вращать тело против движения часовой стрелки (рис. 20).
Плечом силы относительно точки называют кратчайшее расстояние от этой точки до линии действия силы.
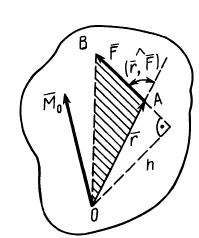
Рис. 20
Условимся векторный момент силы  относительно точки обозначать
относительно точки обозначать  , а его числовую величину —
, а его числовую величину —  . Тогда, согласно определению,
. Тогда, согласно определению,
Как и для алгебраического момента, векторный момент силы относительно точки равен удвоенной площади треугольника, построенного на силе и моментной точке:

Справедлива формула

где  —радиус-вектор, проведенный из моментной точки в точку приложения силы или любую другую точку линии действия силы.
—радиус-вектор, проведенный из моментной точки в точку приложения силы или любую другую точку линии действия силы.
Чтобы убедиться в справедливости формулы (3), достаточно показать, что по величине и направлению выражает векторный момент силы относительно точки . По определению векторного произведения двух векторов известно, что
по величине и направлению выражает векторный момент силы относительно точки . По определению векторного произведения двух векторов известно, что

Как показано на рис. 20,  , причем это равенство справедливо для любой точки линии действия, куда проведен радиус-вектор . Итак,
, причем это равенство справедливо для любой точки линии действия, куда проведен радиус-вектор . Итак,
что совпадает с векторным моментом силы относительно точки . Вектор , как известно, перпендикулярен плоскости, в которой расположены векторы и , т. е. плоскости треугольника  , которой перпендикулярен и векторный момент .
, которой перпендикулярен и векторный момент .
Направление тоже совпадает с направлением . Заметим, что векторный момент силы относительно точки считается вектором, приложенным к этой точке.
Векторный момент силы относительно точки не изменяется от переноса силы вдоль ее линии действия. Он станет равным
нулю, если линия действия силы пройдет через моментную точку.
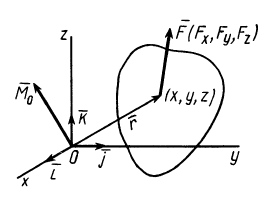
Рис. 21
Если сила дана своими проекциями  на оси координат и даны координаты
на оси координат и даны координаты  точки приложения этой силы (рис. 21), то векторный момент относительно начала координат, согласно формуле (3), после разложения по осям координат вычисляем по формуле
точки приложения этой силы (рис. 21), то векторный момент относительно начала координат, согласно формуле (3), после разложения по осям координат вычисляем по формуле
где  — единичные векторы, направленные по осям координат.
— единичные векторы, направленные по осям координат.
Используя формулу (4), можно выделить проекции на оси координат:
Модуль векторного момента и косинусы углов его с осями координат определяем по формулам
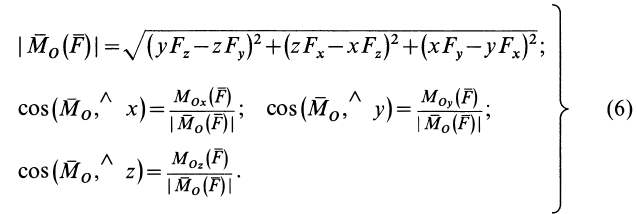
В формулах (6) числовую величину  берем со знаком плюс.
берем со знаком плюс.
Момент силы относительно оси
Моментом силы относительно оси называют алгебраический момент проекции этой силы на плоскость, перпендикулярную оси, относительно точки пересечения оси с этой плоскостью (рис. 22). Момент силы относительно оси считается положительным, если проекция силы на плоскость, перпендикулярную оси (проекция силы на плоскость является вектором), стремится вращать тело вокруг положительного направления оси против часовой стрелки, и отрицательным, если она стремится вращать тело по часовой стрелке. Момент силы, например, относительно оси  обозначим
обозначим  .
.
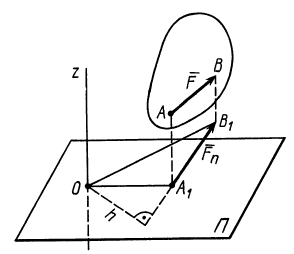
Рис. 22
По определению,

где  — вектор проекции силы
— вектор проекции силы  на плоскость
на плоскость  , перпендикулярную оси , а точка — точка пересечения оси с плоскостью .
, перпендикулярную оси , а точка — точка пересечения оси с плоскостью .
Из определения момента силы относительно оси следует, что введенный выше алгебраический момент силы относительно точки можно считать моментом силы относительно оси, проходящей через эту точку, перпендикулярно плоскости, в которой лежат сила и моментная точка. Момент силы относительно оси можно выразить через площадь треугольника, построенного на проекции силы  и точке пересечения оси с плоскостью:
и точке пересечения оси с плоскостью:

Из формулы (8) можно получить следующие важные свойства момента силы относительно оси:
- Момент силы относительно оси равен нулю, если сила параллельна оси. В этом случае равна нулю проекция силы на плоскость, перпендикулярную оси.
- Момент силы относительно оси равен нулю, если линия действия силы пересекает эту ось. В этом случае линия действия проекции силы на плоскость, перпендикулярную оси, проходит через точку пересечения оси с плоскостью и, следовательно, равно нулю плечо силы
 относительно точки .
относительно точки .
В обоих этих случаях ось и сила лежат в одной плоскости. Объединяя их, можно сказать, что момент силы относительно оси равен нулю, если сила и ось лежат в одной плоскости.
Связь момента силы относительно оси с векторным моментом силы относительно точки на оси
Используя формулу (8), имеем (рис. 23)

Векторный момент силы относительно точки , взятой на пересечении оси с перпендикулярной плоскостью , выражается в виде

Векторный момент  направлен перпендикулярно плоскости треугольника
направлен перпендикулярно плоскости треугольника  . Аналогично, для другой точки
. Аналогично, для другой точки  оси
оси

причем векторный момент  направлен перпендикулярно плоскости треугольника
направлен перпендикулярно плоскости треугольника  . Треугольник
. Треугольник  является проекцией треугольников
является проекцией треугольников  и
и  на плоскость . Из геометрии известно, что площадь проекции плоской фигуры равна площади проецируемой фигуры, умноженной на косинус угла между плоскостями, в которых расположены эти фигуры. Угол между плоскостями измеряется углом между перпендикулярами к этим плоскостям. Перпендикуляром к плоскости треугольника
на плоскость . Из геометрии известно, что площадь проекции плоской фигуры равна площади проецируемой фигуры, умноженной на косинус угла между плоскостями, в которых расположены эти фигуры. Угол между плоскостями измеряется углом между перпендикулярами к этим плоскостям. Перпендикуляром к плоскости треугольника  является ось , а перпендикулярами к плоскостям треугольников
является ось , а перпендикулярами к плоскостям треугольников  и
и  —соответственно векторные моменты
—соответственно векторные моменты  и
и  . Таким образом,
. Таким образом,  , где
, где  — угол между вектором и осью . Отсюда по формулам (8′) и (9) имеем
— угол между вектором и осью . Отсюда по формулам (8′) и (9) имеем

причем знак  полностью определяется знаком
полностью определяется знаком  .
.
Аналогично,

т. е.

где  — любая точка на оси .
— любая точка на оси .
Формулы (11) и (12) отражают искомую связь между моментом силы относительно оси и векторными моментами силы относительно точек, лежащих на этой оси: момент силы относительно оси равен проекции на эту ось векторного момента силы относительно любой точки на оси.
Эту зависимость между моментом силы относительно оси и векторным моментом силы относительно точки на оси можно принять за определение момента силы относительно оси.
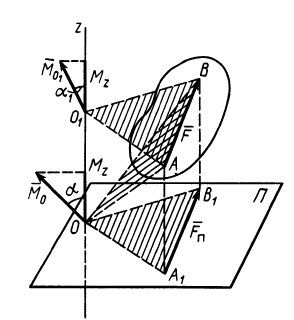
Рис. 23
Формулы для моментов силы относительно осей координат
Используя связь момента силы относительно оси с векторным моментом силы относительно точки на оси, можно получить формулы для вычисления моментов относительно осей координат, если даны проекции силы на оси координат и координаты точки приложения силы. Для оси  имеем
имеем
Согласно (5),
следовательно,

Аналогично, для осей  и
и 

Окончательно

По формулам (13) можно вычислить моменты силы относительно прямоугольных осей координат.
По этим формулам получаются необходимые знаки для  , если проекции силы
, если проекции силы  на оси координат и координаты
на оси координат и координаты  точки приложения силы подставлять в них со знаками этих величин.
точки приложения силы подставлять в них со знаками этих величин.
При решении задач момент силы относительно какой-либо оси часто получают, используя его определение, т. е. проецируя силу на плоскость, перпендикулярную оси, и вычисляя затем алгебраический момент этой проекции относительно точки пересечения оси с этой плоскостью.
Момент пары сил. Сложение пар сил. Равновесие пар сил
При изучении теоретической механики необходимо совершенно отчетливо уяснить, что в статике рассматриваются два простейших элемента: сила и пара сил. Любые две силы, кроме сил, образующих пару, всегда можно заменить одной —сложить их (найти равнодействующую). Пара сил нс поддается дальнейшему упрощению, она не имеет равнодействующей и является простейшим элементом.
Действие пары сил на тело характеризуется ее моментом — произведением одной из сил пары на ее плечо (на кратчайшее расстояние между линиями действия сил, образующих пару).
Единицей момента пары сил в Международной системе служит 1 нм (ньютон-метр = 1 н-1ж), а в системе МКГСС (технической)— 1 кГ-м.
Несколько пар сил, действующих на тело в одной плоскости, можно заменить одной парой сил (равнодействующей парой), момент которой равен алгебраической сумме моментов данных пар:
При равновесии пар сил
Если пары сил действуют в одной плоскости, то при решении задач достаточно рассматривать моменты пар как алгебраические величины. Причем знак момента определяется в зависимости от направления вращающего действия пары сил.
Дальнейшее изложение основано на правиле, т. е. считается момент положительным, если пара сил действует против хода часовой стрелки, если же пара сил действует на тело но ходу часовой стрелки, то момент считается отрицательным.
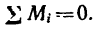
В том случае когда пары сил действуют на тело будучи расположенными в различных плоскостях, гораздо удобнее рассматривать пару сил как вектор, направленный перпендикулярно
к плоскости действия пары сил (рис. 62). Направление вектора в зависимости от направления вращательного действия пары определяется по направлению движения винта с правой нарезкой.
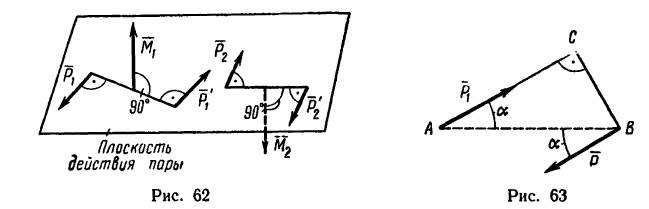
Задача 1.
Определить момент пары сил (рис. 63), если 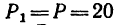 н, АВ — 0,5 м и а = 30°.
н, АВ — 0,5 м и а = 30°.
Решение.
1. При определении момента пары сил нужно прежде всего правильно определить плечо пары. При этом необходимо различать следующие понятия: плечо пары сил и расстояние между точками приложения сил нары.
Так как в механике твердого тела сила—скользящий вектор, то действие силы не изменяется при переносе точки ее приложения вдоль линии ее действия. Значит расстояние между точками приложения сил, образующих пару, можно изменять неограниченно. Но плечо пары при этом переносе остается неизменным.
В частном случае расстояние между точками приложения сил, образующих пару, может быть равно плечу.
Чтобы определить плечо данной пары из точки приложения одной из сил, например из точки В, восставим перпендикуляр ВС к линии действия другой силы. Расстояние ВС и есть плечо данной пары сил. Расстояние между точками приложения сил, образующих пару, АВ=0,5 м.
Легко видеть, что

2. Найдем момент пары сил:

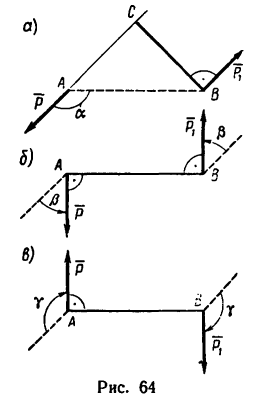
Задача 2.
Как изменится момент пары сил  показанной на рис. 64, а (P = 50 н, AВ=0,4 м и а=135), если
показанной на рис. 64, а (P = 50 н, AВ=0,4 м и а=135), если
повернуть силы  так, чтобы они стали перпендикулярными АВ? Решение.
так, чтобы они стали перпендикулярными АВ? Решение.
1. Найдем момент пары при заданном положении ее сил (рис. 64, а).
Из точки В восставим перпендикуляр ВС к линиям действия сил  и найдем его длину:
и найдем его длину:

Момент пары при заданном положении сил

2. Повернем силы из заданного положения на угол
из заданного положения на угол  =а°— 90э в направлении против хода часовой стрелки (рис. 64, б). При таком положении сил относительно АВ плечом пары сил является расстояние между точками их приложения, поэтому
=а°— 90э в направлении против хода часовой стрелки (рис. 64, б). При таком положении сил относительно АВ плечом пары сил является расстояние между точками их приложения, поэтому

3. Сравнивая полученные результаты, видим, что после поворота сил момент пары увеличивается на 20—14,5 = 5,85 н-м.
4. Легко заметить, что силы  могут достичь перпендикулярного положения к АВ после их поворота на угол у в направлении по ходу часовой стрелки (рис. 64, в). В том случае плечом пары является тот же отрезок АВ, но момент пары
могут достичь перпендикулярного положения к АВ после их поворота на угол у в направлении по ходу часовой стрелки (рис. 64, в). В том случае плечом пары является тот же отрезок АВ, но момент пары

Момент пары сил изменяет свой знак.
Задача 3.
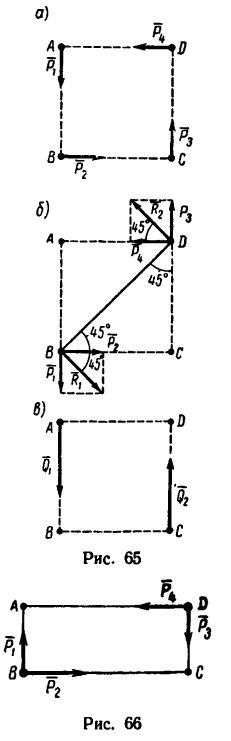
К точкам А, С и В, D, образующим вершины квадрата со стороной 0,5 м (рис. 65, а), приложены равные по модулю силы (Р = 12н) таким образом, что они образуют две пары сил
 Определить момент равнодействующей пары сил
Определить момент равнодействующей пары сил
Решение 1.
Плечи у обеих пар сил равны стороне квадрата поэтому

Решение 2.
1. Перенесем силы  из точек
из точек  в точки В и D (рис. 65, б). В точках В и D получаются системы сходящихся сил
в точки В и D (рис. 65, б). В точках В и D получаются системы сходящихся сил  и
и одинаковыми модулями.
одинаковыми модулями.
2. Сложим попарно эти силы у каждой из точек В и D. В обоих случаях

3. Силы R, модули которых теперь известны, направлены перпендикулярно к диагонали BD квадрата. Значит эта диагональ является плечом вновь образовавшейся пары сил  заменяющей собой две данные.
заменяющей собой две данные.
4. Найдем момент пары 

и, следовательно,

Эту пару в соответствии со вторым решением можно представить в виде пары  с плечом BD (диагональю данного квадрата).
с плечом BD (диагональю данного квадрата).
Но можно равнодействующую пару представить и в любом другом виде, например в виде сил Q = 24 и, приложенных к двум любым вершинам квадрата ABCD (рис. 65, в)
- Заказать решение задач по теоретической механике
Задача 4.
На прямоугольник ABCD (рис. 67) вдоль его длинных сторон действует пара сил  Какую пару сил нужно приложить к прямоугольнику, направив силы вдоль его коротких сторон, чтобы уравновесить пару
Какую пару сил нужно приложить к прямоугольнику, направив силы вдоль его коротких сторон, чтобы уравновесить пару 
Решение.
1. Момент данной пары сил

необходимо уравновесить парой, момент которой обозначим Л1м. Тогда, согласно условию равновесия,
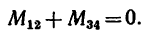
Откуда

2. Обозначив силы, образующие искомую пару  замечая, что ее плечо равно ВС, получим
замечая, что ее плечо равно ВС, получим
Отсюда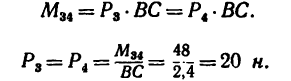
•Значит к прямоугольнику необходимо приложить пару сил с положительным (направленным против хода часовой стрелки) моментом, равным 48 н м. Силы, образующие эту пару, равняются
20 н каждая и одна из них должна действовать вдоль стороны АВ от А к В, вторая — вдоль стороны CD от С к D.
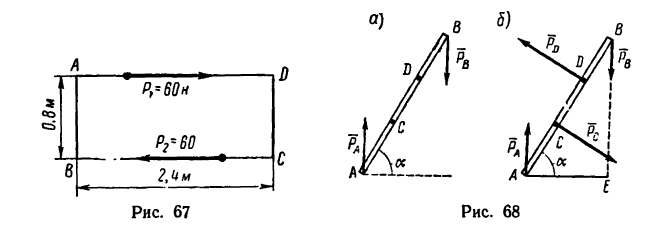
Задача 5.
Прямолинейный стержень АВ должен находиться в равновесии в положении, показанном на рис. 68, а (угол а =  При этом в точках А и В на стержень действуют вертикальные силы
При этом в точках А и В на стержень действуют вертикальные силы  образующие пару
образующие пару  Какие две равные силы нужно приложить к стержню в точках С и D, направив их перпендикулярно к стержню, чтобы обеспечить равновесие. АВ = 3 м, CD— 1 м,
Какие две равные силы нужно приложить к стержню в точках С и D, направив их перпендикулярно к стержню, чтобы обеспечить равновесие. АВ = 3 м, CD— 1 м, 
Решение.
1. Пару сил можно уравновесить только парой сил. Поэтому в точках С и D к стержню необходимо приложить две равные силы так, чтобы они образовали пару сил с моментом, равным моменту пары  но имеющим противоположный знак.
но имеющим противоположный знак.
Так как пара  поворачивает стержень на ходу часовой стрелки, искомые силы должны поворачивать его против хода часовой стрелки (рис. 68, б).
поворачивает стержень на ходу часовой стрелки, искомые силы должны поворачивать его против хода часовой стрелки (рис. 68, б).
2. Применяем условие равновесия:
Или, подставив значения моментов,
где
Отсюда
Следовательно, в точках С и D необходимо приложить силы  по 150 н каждая, как показано на рис. 68, б.
по 150 н каждая, как показано на рис. 68, б.
Момент силы относительно точки
Момент силы относительно точки при решении задач по статике, а затем и по динамике имеет не менее важное значение, чем проекции сил. Поэтому нужно уметь определять эту величину безошибочно. Обычно его числовое значение находят неправильно из-за ошибок, допускаемых при определении плеча.
Чтобы не допускать ошибок при определении моментов сил относительно точки, рекомендуется придерживаться следующего порядка:
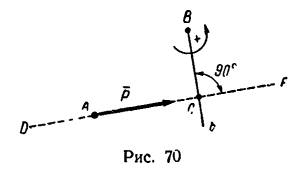
- Прежде всего нужно научиться «видеть» силу, момент которой определяем, и центр моментов – точку, относительно которой определяем момент (рис. 70 – сила и центр моментов – точка В).
- Затем из центра момента проводим прямую ВЬ перпендикулярно к линии действия силы DF. Длина перпендикуляра ВС от центра момента до линии действия силы и есть плечо.
- Потом находим знак момента. При этом если сила стремится повернуть плечо вокруг центра момента против хода часовой стрелки, то считаем момент положительным; если по ходу часовой стрелки, то отрицательным (тоже правило, что и при определении знака момента пары сил).
- Находим числовое значение момента силы относительно точки, умножив модуль силы на плечо.
 и центр моментов – точка В).
и центр моментов – точка В).По рис. 70

В частном случае момент силы может равняться нулю. Это происходит тогда, когда центр моментов лежит на линии действия силы, при этом плечо равняется нулю. По рис. 70 момент силы  относительно точки А (или С) равен нулю.
относительно точки А (или С) равен нулю.
Задача 6.
Определить моменты шести заданных сил (рис. 71) относительно точек А, В и С, если

Решение 1 — определение моментов гнести заданных сил относительно точки А (рис. 71, а).
1. Центр моментов в точке А. Через точку А проходят линии действия трех сил 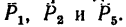 Значит для этих сил плечи равны нулю. Следовательно,
Значит для этих сил плечи равны нулю. Следовательно,

2. Находим момент силы  Опустив из точки А на линию действия
Опустив из точки А на линию действия
силы  перпендикуляр AD, получим плечо силы
перпендикуляр AD, получим плечо силы  Длину AD легко найти, так как это катет треугольника ABD:
Длину AD легко найти, так как это катет треугольника ABD:
3. Величина момента отрицательная (сила  поворачивает плечо AD вокруг точки А но ходу часовой стрелки), следовательно,
поворачивает плечо AD вокруг точки А но ходу часовой стрелки), следовательно,

4. Находим момент силы  Плечом силы
Плечом силы  является перпендикуляр АЕ к СЕ – линии действия силы
является перпендикуляр АЕ к СЕ – линии действия силы  Из треугольника АСЕ
Из треугольника АСЕ
Величина момента положительная (плечо АЕ поворачивается около точки А силой  против хода часовой стрелки). Следовательно,
против хода часовой стрелки). Следовательно,

5. Находим момент силы  Плечом силы
Плечом силы  относительно точки А является отрезок АС, так как сила
относительно точки А является отрезок АС, так как сила  направлена к АС перпендикулярно. Величина момента отрицательная:
направлена к АС перпендикулярно. Величина момента отрицательная:

Решение 2 — определение моментов сил относительно точки В (рис. 71, б).
1. Центр моментов в точке В.
2. Через точку В проходят линии действия двух сил:  Следовательно,
Следовательно,

3. Находим момент силы  Плечо силы
Плечо силы 
Величина момента отрицательная:

4. Находим момент силы  Плечо силы
Плечо силы 
Момент отрицательный:

5. Находим момент силы  Плечо силы
Плечо силы 
Величина момента положительная:

6. Находим момент силы  Плечом силы
Плечом силы является отрезок ВС. Момент положительный:
является отрезок ВС. Момент положительный:

Решение 3 — определение моментов сил относительно точки С (рис. 71, в) рекомендуется выполнить самостоятельно.
Ответ. 

В задаче силы расположены так, что либо их плечи определяются очень просто – как катеты прямоугольных треугольников, в которых даны гипотенузы, либо плечи заданы в условии задачи (ВС и АС).
Но иногда некоторые силы заданной системы оказываются расположенными относительно выбранного центра моментов так, что определить длину плеча трудно и требуется, например, предварительно вычислить длины еще одного-двух отрезков. В таких случаях целесообразно силу разложить на две составляющие и применить для определения ее момента теорему Вариньона.
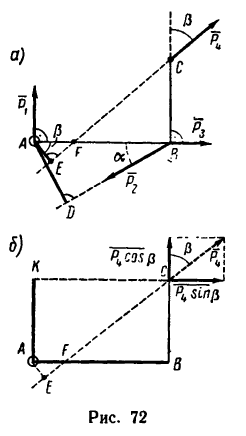
Задача 7.
Определить моменты относительно точки 
 я, приложенных в точках А, В и С, как показано на рис. 72, а. Углы
я, приложенных в точках А, В и С, как показано на рис. 72, а. Углы ВС =1,5 м.
ВС =1,5 м.
Решение.
1. Относительно точки А моменты сил определяются аналогично
определяются аналогично

2. Находим момент силы  Вариант 1-й (рис. 72, а). Плечо АЕ силы
Вариант 1-й (рис. 72, а). Плечо АЕ силы  в данном случае определяем из
в данном случае определяем из  в котором известен только
в котором известен только  . Значит нужно предварительно определить одну из сторон. Найдем AF:
. Значит нужно предварительно определить одну из сторон. Найдем AF:
AF = AB – FB.
Величину FB находим из  в котором
в котором 
следовательно,

И теперь можем определить плечо АЕ:

Раскрываем скобки и заменяем 

Момент положительный, следовательно:
Вариант 2-й. Чтобы избежать определения плеча АЕ, которое в данном случае находится после предварительного вычисления двух отрезков (FB и AF), необходимо момент силы  относительно точки А найти по теореме Вариньона: момент равнодействующей плоской системы сил относительно любой точки, лежащей в той же плоскости, равен алгебраической сумме моментов составляющих сил относительно той же точки.
относительно точки А найти по теореме Вариньона: момент равнодействующей плоской системы сил относительно любой точки, лежащей в той же плоскости, равен алгебраической сумме моментов составляющих сил относительно той же точки.
Разложим силу  на две составляющие: одну, направленную вдоль отрезка ВС, и другую — перпендикулярно к нему (рис. 72, б).
на две составляющие: одну, направленную вдоль отрезка ВС, и другую — перпендикулярно к нему (рис. 72, б).
Модуль первой составляющей  а ее плечо — отрезок АВ, длина которого задана. Модуль второй составляющей
а ее плечо — отрезок АВ, длина которого задана. Модуль второй составляющей  а ее плечо АК = ВС =1,5 м.
а ее плечо АК = ВС =1,5 м.
Применяя теорему Вариньона, получаем

Как видно, получено точно такое же значение момента, что и в первом варианте решения:

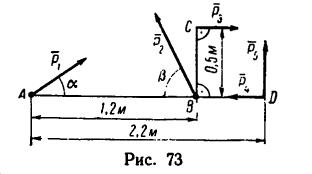
- Теория пар сил
- Приведение системы сил к простейшей системе
- Условия равновесия системы сил
- Плоская система сил
- Аксиомы и теоремы статики
- Система сходящихся сил
- Плоское движение тела
- Принцип виртуальных перемещений
Вектор силы (Определение, Пример)
ЧТО ТАКОЕ ВЕКТОР СИЛЫ
Это то, что тянет и толкает; силы мы чувствуем, когда они на нас действуют; силы растягивают пружины, заставляют тело двигаться быстрее. Мы будем измерять силы при помощи пружинных весов. Поскольку эти приборы обычно градуируют в килограммах силы мы будем пока выражать силу тоже в килограммах силы.
При сооружении и проектировании мостов, зданий, кранов, машин инженеров очень заботит сложение сил или же разность сил для определения силы, необходимой для достижения равновесия. Можно показать, что силы — это векторы, т. е. они подчиняются правилу геометрического сложения.
Векторному сложению и разложению уравновешенных сил посвящен раздел физики, называемый «статикой». Это большой, но скучный раздел физики, и большинство учебников уделяет ему много места, излагая приемы решения задач инженерной статики. Мы ограничимся лишь несколькими примерами, и даже их, пожалуй, лучше было бы опустить, чтобы уделить больше времени изучению силы и движения.
Прежде всего мы должны удостовериться в том, что силы — это векторы. Сказать, что они должны быть векторами, поскольку они характеризуются величиной и направлением, недостаточно. Это не убеждает нас в том, что силы складываются геометрически.
Хотя это утверждение кажется вполне правдоподобным, особенно тем, кто имеет дело с канатами и веревками на кораблях или кому приходится заниматься разбивкой палаток, мы же должны проворить его непосредственно.
Опыт по определению вектора силы
Часто прибегают еще к одному способу проверки. Этот способ проще, но его косвенный характер порой (не совсем добросовестно) игнорируют. К узлу прикладывают две тянущие силы FА и FВ (применяют гири и блоки или пружинные весы), а третья сила FС удерживает узел в покое. Затем при помощи построения определяется сумма сил FА и FВ .
Она равна и проти воположна силе FС. Это требует дополнительного доказательства, поскольку FС не равнодействующая (сумма) двух других сил, а «равновесная» сила, необходимая, чтобы им противостоять.
Рис. Косвенная проверка векторного сложения сил.
Равновесие сил
Если на какую-нибудь деталь крана или моста действует несколько сил сразу, а инженеру нужно, чтобы она была и оставалась в состоянии покоя, то для этого сумма всех действующих сил должна быть равна нулю. Тогда в соответствии с представлением Галилея эта деталь должна либо постоянно двигаться, либо постоянно оставаться в состоянии покоя.
В этом случае мы говорим, что силы находятся «в равновесии». Если сумма нескольких сил равна нулю, то это должно быть видно на диаграмме векторного сложения; длина линии, соединяющей исходную точку диаграммы с конечной, должна быть равна нулю. Это означает, что векторная диаграмма должна представлять собой замкнутую фигуру.
Таким образом, если сумма сил равна нулю, то конец векторного многоугольника должен прийти обратно к началу. Это иллюстрирует рис. 3. Условие равенства нулю равнодействующей для постоянного равновесия сил должно выполняться для всей конструкции, например для всего крана или моста, но оно должно также выполняться для каждой отдельной детали конструкции, находящейся в состоянии равновесия.
Применяя это условие к какой-нибудь определенной детали, например к стреле крана, к одной опоре моста, к заклепке, связывающей воедино несколько различных деталей моста, или к грузу маятника, нужно быть внимательным и учитывать все силы, действующие на данную деталь. Тогда мы сможем утверждать, что имеем полный набор сил, образующих замкнутую векторную диаграмму, если, конечно, деталь находится в равновесии.
При решении задач не следует включать в рассмотрение силы, приложенные к другим деталям. Сначала выберите и пометьте выбранную деталь, которая, как вы считаете, находится в равновесии.
Равновесие трех сил, треугольник сил
Если три силы находятся в равновесии, то их векторная диаграмма должна представлять собой замкнутый треугольник (рис. 4). Если известны две силы, то можно вычислить величину и направление третьей.
а — три силы в равновесии) б — три силы не находятся в равновесии.
Этим пользуются при решении инженерных задач. Во многих конструкциях на каждую деталь, играющую важную роль, действуют как раз три силы. Чтобы конструкция была устойчивей, каждая деталь должна оставаться в состоянии покоя; сумма всех действующих на нее сил должна быть равна нулю. Таким образом, если к любой детали приложены три силы, мы строим для них замкнутый треугольник.
Похожие страницы:
Понравилась статья поделись ей
Leave a Comment
Для отправки комментария вам необходимо авторизоваться.
Как составить силовые уравнения
В задачах динамики учитывают силы, действующие на тело. Векторы сил могут действовать в различных направлениях. Большинство школьных задач можно решить, располагая векторы сил в одной плоскости. Поэтому, в статье будем рассматривать векторы, лежащие в одной плоскости — компланарные векторы.
Что такое равнодействующая
Равнодействующий вектор – это вектор, который мы получаем, когда складываем несколько векторов сил.
Результат сложения может дать:
- вектор, имеющий длину,
- или вектор, не имеющий длины.
Примечание: Когда у вектора отсутствует длина, говорят, что вектор равен нулю. На рисунке нулевой вектор можно изобразить одной точкой. Длины у точки нет – т. е. длина нулевая, а направление может быть любым.
Длина вектора содержит сумму квадратов всех его проекций на оси.
Где ( a_ ) и ( a_ ) — это проекции вектора (ссылка) ( vec ) на оси Ox и Oy.
Когда вектор равен нулю, равна нулю каждая его проекция на осях.
Длина вектора отлична от нуля, когда хотя бы одна его проекция ненулевая.
Левая часть силового уравнения
В левой части силового уравнения записываем силы, действующие на тело.
Когда векторы сил направлены вдоль параллельных прямых, проводим на рисунке одну ось. Если векторы сил не параллельные, проводим две оси на плоскости. Раскладываем векторы на проекции по осям. Для каждой оси составляем отдельное уравнение. Количество уравнений совпадает с количеством осей.
Если сила сонаправлена с осью, то она войдет в левую часть уравнения со знаком «+», а если она направлена против оси — то со знаком «минус».
Правая часть силового уравнения
В правой части уравнения записываем равнодействующую. В задаче может присутствовать несколько осей, вдоль каждой оси направляем отдельную проекцию равнодействующей.
Примечание: Тело может вдоль одной оси двигаться с ускорением, а вдоль другой оси двигаться без ускорения, или, вообще, покоиться. Например, тело может двигаться по вертикали под действием силы тяжести, а по горизонтали при этом не смещаться.
Когда проекция равнодействующей вдоль какой-либо оси не равна нулю, тело по оси будет двигаться с ускорением. Это следует из второго закона Ньютона.
Тогда в правой части уравнения запишем:
- (ma), если ускорение направлено туда же, куда направлена ось;
- (- ma), если ускорение направлено противоположно оси;
А когда проекция равнодействующей на ось нулевая, ускорение вдоль оси отсутствует. Тогда вдоль этой оси тело движется с неизменной скоростью, или же, вдоль этой оси движение отсутствует. Это следует из первого закона Ньютона.
В правой части уравнения запишем ноль (0 = ускорения нет).
Векторы сил параллельны
В случае, когда векторы направлены вдоль одной прямой, достаточно выбрать и провести единственную ось.
Выясним, как выглядит силовое уравнение для задачи, в которой векторы сил направлены вдоль единственной оси. Например, парашютист спускается вертикально вниз (рис. 1) на парашюте под действием силы тяжести.
Проведем на рисунке ось, направим ее вверх.
Примечание: Мы можем направить ось вниз, если захотим. При таком направлении оси знаки проекций векторов изменятся на противоположные, но на конечный ответ это никак не повлияет.
Составим левую часть уравнения. В левой части мы запишем силы, действующие на парашютиста:
Сила ( F_<text<сопр>>) направлена по оси, поэтому войдет в уравнение со знаком «+». А сила ( m cdot g ) вошла в уравнение со знаком «минус», так как направлена против оси.
В правую часть уравнения поместим равнодействующую.
Размеры парашюта рассчитаны так, что парашютист опускается вниз с постоянной (неизменной, т. е. одной и той же) скоростью. Значит, скорость есть, она не меняется, ускорения нет.
Математики запишут, что ускорение есть, но оно – нулевое (vec=0).
То есть, вдоль вертикальной оси тело движется без ускорения, значит, силы компенсировались. По первому закону Ньютона, равнодействующая равна нулю и, в правой части уравнения запишем ноль.
Примечания:
- На рисунке 1 скорость обозначена красным вектором, направленным вниз и обозначенным, как (vec>). Обычно математики дописывают нижний индекс к величине, которая не должна меняться. Так как у вектора скорости этот индекс есть, скорость считаем неизменной.
- На рисунке векторы скоростей и ускорений нужно рисовать отдельно от векторов сил! Решая задачу, мы будем складывать векторы (ссылка), имеющие одинаковую размерность. Силы измеряют в Ньютонах, поэтому их можно складывать. А ускорения и скорости измеряют в других единицах, с Ньютонами их сложить не получится. Именно поэтому, чтобы не запутаться, ускорения и скорости рисуем на небольшом расстоянии от тела, отдельно от векторов сил.
Итоговое силовое уравнение имеет вид:
[large F_<text<сопр>> — m cdot g = 0 ]
Зная массу парашютиста, можно вычислить силу сопротивления воздуха. А зная эту силу, можно рассчитать и размеры парашюта.
Векторы сил не параллельны
Когда векторы направлены вдоль разных прямых, будем проводить две взаимно перпендикулярные оси на плоскости.
Разберем задачу равнозамедленного движения тела по горизонтальной шероховатой поверхности (рис. 2).
Поверхность шероховатая, это намек на то, что есть сила трения. А если в условии напишут, что поверхность гладкая, значит, силы трения нет.
Движение равнозамедленное (ссылка), значит, скорость тела уменьшается и есть вектор ускорения, который направлен против вектора скорости.
Нарисуем взаимно перпендикулярные оси. Ось Ox проведем горизонтально, а ось Oy – вертикально. Рассмотрим оси и проекции векторов на них по очереди.
Горизонтальная ось. Пусть движение тела происходит в положительном направлении оси Ox. Сила трения всегда направлена против движения, поэтому направим ее влево. Скорость тела направлена вправо и будет уменьшаться, значит, ускорение, так же, направим влево. Вектор ускорения рисуем отдельно от векторов сил.
Наличие ускорения говорит о том, что вдоль оси Ox равнодействующая имеет не нулевую проекцию. Ускорение направлено против оси, запишем (- ma) в правой части уравнения.
Так выглядит уравнение для горизонтальной оси
Вертикальная ось. Вниз направлена сила тяжести, а вверх – сила реакции опоры. Так как поверхность горизонтальная и тело не движется ни вверх, ни вниз, то движения вдоль оси Oy нет. Значит, сила тяжести и реакция опоры компенсировались и нет ускорения вдоль оси Oy. В правой части уравнения для вертикальной оси запишем ноль.
Для вертикальной оси уравнение выглядит так:
[large N — m cdot g = 0 ]
Система, пригодная для решения задачи, состоит из двух уравнений
Куда направить оси
Разберем равнозамедленное движение тела вверх по наклонной шероховатой плоскости (рис. 3).
Силы, действующие на тело в этой задаче, не параллельные, направлены вдоль разных прямых. Поэтому для составления уравнений нужно использовать две взаимно перпендикулярные оси. Попробуем для начала провести ось Oy вертикально, а ось Ox горизонтально.
Из рисунка 3 видно, вдоль оси направлен только один вектор (mg). Остальные векторы сил не параллельны ни одной из осей. Такие векторы придется раскладывать на проекции, это усложнит конечную систему уравнений.
Если выберем оси так, как показано на рисунке 3, на проекции нужно будет разложить три вектора.
Попробуем теперь провести оси так, чтобы как можно большее количество векторов оказались параллельными осям (рис. 4). Из рисунка видно, что только один вектор (mg) окажется ненаправленным вдоль какой-либо оси. Остальные векторы сил параллельны осям.
При таком выборе осей раскладывать на проекции придется только один вектор. Это позволит быстрее решить задачу и решать более простые уравнения.
Примечание: Если мы выбререм оси так, как это представлено на рисунке 3, получим более сложные уравнения. Но решив их, мы получим точно такой же ответ, как и в случае выбора осей на рисунке 4.
Выводы:
- Выбор осей на конечный результат не влияет! А влияет только на сложность полученных уравнений.
- Оси проводим так, чтобы как можно больше векторов оказались направленными вдоль осей.
Движение по наклонной плоскости
Составим систему уравнений для решения такой задачи:
Велосипедист подъезжает с начальной скоростью к подъему, посыпанному песком и, едет в гору на велосипеде по инерции, не крутя педали. Масса велосипедиста с велосипедом, начальная скорость его, коэффициент сопротивления поверхности и угол наклона известны.
Нужно составить систему силовых уравнений, чтобы найти ускорение велосипедиста. А после, зная начальную скорость и ускорение, найти путь, который велосипедист сможет проехать по инерции в горку.
Выражение для ускорения
Составим рисунок, на котором изобразим силы, действующие на велосипедиста (рис. 5)
Мы провели оси так, чтобы пришлось разложить на проекции только один вектор и система силовых уравнений оказалась достаточно простой.
Пользуясь осями координат, составляем теперь уравнения в проекциях.
Уравнение для проекций векторов на ось Ox:
[ large — F_<text<трен>> – m cdot g_ = — m cdot a ]
Уравнение для проекций векторов на ось Oy:
[ large N – m cdot g_ = 0 ]
Разложим теперь силу тяжести — вектор (mg) на проекции. Чтобы проделать это разложение, нужно отметить угол (alpha ) межу вектором (mg) и одной из осей. В нашем случае, это угол между вектором (mg) и осью Oy.
[ large begin m cdot g_ = mg cdot cos left(alpha right) \ m cdot g_ = mg cdot sin left(alpha right) end ]
Подставив разложение вектора (mg) в уравнения для осей, получим такую систему уравнений
[ large begin — F_<text<трен>> – mg cdot sin left(alpha right) = — m cdot a \ N – mg cdot cos left(alpha right) = 0 end ]
Дополним эту систему выражением для силы трения.
Запишем эти уравнения в систему и выразим из нее уравнение для ускорения.
[ large begin N = mg cdot cos left(alpha right) \ F_<text<трен>> = mu cdot mg cdot cos left(alpha right) \ mu cdot mg cdot cos left(alpha right) + mg cdot sin left(alpha right) = m cdot a end ]
Поделим нижнее уравнение системы на массу велосипедиста и запишем окончательно уравнение для ускорения:
[ large mu cdot g cdot cos left(alpha right) + g cdot sin left(alpha right) = a ]
Выражение для пройденного пути
Запишем выражения для связи скоростей и пройденного пути. Велосипедист движется по инерции в гору и его скорость уменьшается из-за силы тяжести и силы сопротивления поверхности, посыпанной песком. Когда скорость велосипедиста обратится в ноль, он, проехав часть пути в гору, остановится. Используем систему двух уравнений, она описывает путь при учете уменьшения скорости до нуля:
[ large begin 0 = v_ <0>— a cdot t \ S = v_ <0>cdot t — a cdot frac <2>end ]
Получим теперь уравнение для пути, в котором будут присутствовать только начальная скорость и ускорение и, будет отсутствовать время.
Упрощенная система для решения задачи теперь включает всего два уравнения
[ large begin mu cdot g cdot cos left(alpha right) + g cdot sin left(alpha right) = a \ S = v_ <0>cdot frac> — frac> <2>cdot frac> end ]
Подставив в эту систему известные значения начальной (v_<0>) скорости велосипедиста, коэффициент (mu) сопротивления поверхности и угол (alpha) наклона плоскости, сможем посчитать путь, пройденный велосипедистом до его полной остановки.
Законы сложения сил в механике
При воздействии на одно тело нескольких сил одновременно тело начинает двигаться с ускорением, являющимся векторной суммой ускорений, которые бы возникли под воздействием каждой силы по отдельности. К действующим на тело силам, приложенным к одной точке, применяется правило сложения векторов.
Векторная сумма всех сил, одновременно воздействующих на тело, это сила равнодействующая, которая определяется по правилу векторного сложения сил:
R → = F 1 → + F 2 → + F 3 → + . . . + F n → = ∑ i = 1 n F i → .
Равнодействующая сила действует на тело также, как и сумма всех действующих на него сил.
Правило параллелограмма и правило многоугольника
Для сложения 2 -х сил используют правило параллелограмма (рисунок 1 ).
Рисунок 1 . Сложение 2 -х сил по правилу параллелограмма
Выведем формулу модуля равнодействующей силы с помощью теоремы косинусов:
R → = F 1 → 2 + F 2 → 2 + 2 F 1 → 2 F 2 → 2 cos α
При необходимости сложения более 2 -х сил используют правило многоугольника: от конца
1 -й силы необходимо провести вектор, равный и параллельный 2 -й силе; от конца 2 -й силы необходимо провести вектор, равный и параллельный 3 -й силе и т.д.
Рисунок 2 . Сложение сил правилом многоугольника
Конечный вектор, проведенный от точки приложения сил в конец последней силы, по величине и направлению равняется равнодействующей силе. Рисунок 2 наглядно иллюстрирует пример нахождения равнодействующей сил из 4 -х сил: F 1 → , F 2 → , F 3 → , F 4 → . Причем суммируемые векторы совсем необязательно должны быть в одной плоскости.
Результат действия силы на материальную точку будет зависеть только от ее модуля и направления. У твердого тела есть определенные размеры. Потому силы с одинаковыми модулями и направлениями вызывают разные движения твердого тела в зависимости от точки приложения.
Линией действия силы называют прямую, проходящую через вектор силы.
Рисунок 3 . Сложение сил, приложенных к различным точкам тела
Если силы приложены к различным точкам тела и действуют не параллельно по отношению друг к другу, тогда равнодействующая приложена к точке пересечения линий действия сил (рисунок 3 ). Точка будет находиться в равновесии, если векторная сумма всех сил, действующих на нее, равняется 0 : ∑ i = 1 n F i → = 0 → . В данном случае равняется 0 и сумма проекций данных сил на любую координатную ось.
Разложение вектора силы по направлениям
Разложение сил на две составляющие – это замена одной силы 2 -мя, приложенными в той же точке и производящими на тело такое же действие, как и эта одна сила. Разложение сил осуществляется, как и сложение, правилом параллелограмма.
Задача разложения одной силы (модуль и направление которой заданы) на 2 , приложенные в одной точке и действующие под углом друг к другу, имеет однозначное решение в следующих случаях, когда известны:
- направления 2 -х составляющих сил;
- модуль и направление одной из составляющих сил;
- модули 2 -х составляющих сил.
Пример 1
Необходимо разложить силу F на 2 составляющие, находящиеся в одной плоскости с F и направленные вдоль прямых a и b (рисунок 4 ). Тогда достаточно от конца вектора F провести 2 прямые, параллельные прямым a и b . Отрезок F A и отрезок F B изображают искомые силы.
Рисунок 4 . Разложение вектора силы по направлениям
Второй вариант данной задачи – найти одну из проекций вектора силы по заданным векторам силы и 2 -й проекции (рисунок 5 а ).
Рисунок 5 . Нахождение проекции вектора силы по заданным векторам
Во втором варианте задачи необходимо построить параллелограмм по диагонали и одной из сторон, как в планиметрии. На рисунке 5 б изображен такой параллелограмм и обозначена искомая составляющая F 2 → силы F → .
Итак, 2 -й способ решения: прибавим к силе силу, равную — F 1 → (рисунок 5 в ). В итоге получаем искомую силу F → .
Три силы F 1 → = 1 Н ; F 2 → = 2 Н ; F 3 → = 3 Н приложены к одной точке, находятся в одной плоскости (рисунок 6 а ) и составляют углы с горизонталью α = 0 ° ; β = 60 ° ; γ = 30 ° соответственно. Необходимо найти равнодействующую силу.
Решение
Рисунок 6 . Нахождение равнодействующей силы по заданным векторам
Нарисуем взаимно перпендикулярные оси О Х и O Y таким образом, чтобы ось О Х совпадала с горизонталью, вдоль которой направлена сила F 1 → . Сделаем проекцию данных сил на координатные оси (рисунок 6 б ). Проекции F 2 y и F 2 x отрицательны. Сумма проекций сил на координатную ось О Х равняется проекции на данную ось равнодействующей: F 1 + F 2 cos β — F 3 cos γ = F x = 4 — 3 3 2 ≈ — 0 , 6 Н .
Точно также для проекций на ось O Y : — F 2 sin β + F 3 sin γ = F y = 3 — 2 3 2 ≈ — 0 , 2 Н .
Модуль равнодействующей определим с помощью теоремы Пифагора:
F = F x 2 + F y 2 = 0 , 36 + 0 , 04 ≈ 0 , 64 Н .
Направление равнодействующей найдем при помощи угла между равнодействующей и осью (рисунок 6 в ):
t g φ = F y F x = 3 — 2 3 4 — 3 3 ≈ 0 , 4 .
Сила F = 1 к Н приложена в точке В кронштейна и направлена вертикально вниз (рисунок 7 а ). Необходимо найти составляющие данной силы по направлениям стержней кронштейна. Все необходимые данные отображены на рисунке.
Решение
Рисунок 7 . Нахождение составляющих силы F по направлениям стержней кронштейна
Дано:
F = 1 к Н = 1000 Н
Пускай стержни прикручены к стене в точках А и С . На рисунке 7 б изображено разложение силы F → на составляющие вдоль направлений А В и В С . Отсюда понятно, что
F 1 → = F t g β ≈ 577 Н ;
F 2 → = F cos β ≈ 1155 Н .
Ответ: F 1 → = 557 Н ; F 2 → = 1155 Н .
источники:
http://formulki.ru/mehanika/kak-sostavit-silovye-uravneniya
http://zaochnik.com/spravochnik/fizika/elementy-statiki/zakony-slozhenija-sil-v-mehanike/
