Ядро линейного отображения — это такое линейное подпространство области определения отображения, каждый элемент которого отображается в нулевой вектор [1][2]. А именно: если задано линейное отображение  между двумя векторными пространствами V и W, то ядро отображения L — это векторное пространство всех элементов
между двумя векторными пространствами V и W, то ядро отображения L — это векторное пространство всех элементов  пространства V, таких что
пространства V, таких что  , где
, где  обозначает нулевой вектор из W[3], или более формально:
обозначает нулевой вектор из W[3], или более формально:

Свойства[править | править код]

Ядро и образ отображения
L.
Ядро отображения L — это линейное подпространство области определения V[4].
В линейном отображении два элемента V имеют один и тот же образ в W тогда и только тогда, когда их разность лежит в ядре отображения L:

Из этого следует, что образ L изоморфен факторпространству пространства V по ядру:

В случае, когда V конечномерно, из этого следует теорема о ранге и дефекте[en]:

где под рангом мы понимаем размерность образа отображения L, а под дефектом — размерность ядра отображения L[5].
Если V является предгильбертовым пространством, факторпространство  можно отождествить с ортогональным дополнением к V пространства
можно отождествить с ортогональным дополнением к V пространства  . Это является обобщением линейных операторов пространства строк или кообраза матрицы.
. Это является обобщением линейных операторов пространства строк или кообраза матрицы.
Приложение к модулям[править | править код]
Понятие ядра также имеет смысл для гомоморфизмов модулей, которые являются обобщениями векторных пространств, где скаляры — элементы кольца, а не поля. Область определения отображения — это модуль с ядром, образующий подмодуль. Здесь концепции ранга и размерности ядра не обязательны.
В функциональном анализе[править | править код]
Если  и
и  являются топологическими векторными пространствами, а конечномерно, то линейный оператор непрерывен тогда и только тогда, когда ядро отображения
являются топологическими векторными пространствами, а конечномерно, то линейный оператор непрерывен тогда и только тогда, когда ядро отображения  является замкнутым подпространством пространства .
является замкнутым подпространством пространства .
Представление в виде матричного умножения[править | править код]
Рассмотрим линейное отображение, представленное матрицей  размера
размера  с коэффициентами из поля
с коэффициентами из поля  (обычно из
(обычно из  или
или  ), то есть оперирующие с вектор-столбцами
), то есть оперирующие с вектор-столбцами  с
с  элементами из поля .
элементами из поля .
Ядро этого линейного отображения — это множество решений уравнения  , где понимается как нулевой вектор. Размерность ядра матрицы называется дефектом матрицы . В виде операций на множествах,
, где понимается как нулевой вектор. Размерность ядра матрицы называется дефектом матрицы . В виде операций на множествах,

Матричное уравнение эквивалентно однородной системе линейных уравнений:

Тогда ядро матрицы — это то же самое, что и решение набора приведённых выше однородных уравнений.
Свойства подпространства[править | править код]
Ядро матрицы над полем является линейным подпространством  . То есть ядро матрицы , множество
. То есть ядро матрицы , множество  , имеет следующие три свойства:
, имеет следующие три свойства:
 всегда содержит нулевой вектор, поскольку .
всегда содержит нулевой вектор, поскольку .- Если и , то . Это следует из свойства дистрибутивности матричного умножения.
- Если , а является скаляром , то , поскольку .







Пространство строк матрицы[править | править код]
Произведение  может быть записано в терминах скалярного произведения векторов следующим образом:
может быть записано в терминах скалярного произведения векторов следующим образом:

Здесь  означают строки матрицы . Отсюда следует, что принадлежит ядру матрицы тогда и только тогда, когда вектор ортогонален (перпендикулярен) каждой из вектор-строк матрицы (поскольку ортогональность определяется как равенство нулю скалярного произведения).
означают строки матрицы . Отсюда следует, что принадлежит ядру матрицы тогда и только тогда, когда вектор ортогонален (перпендикулярен) каждой из вектор-строк матрицы (поскольку ортогональность определяется как равенство нулю скалярного произведения).
Пространство строк, или кообраз матрицы , — это линейная оболочка вектор-строк матрицы . По указанным выше причинам ядро матрицы является ортогональным дополнением пространству строк. То есть вектор лежит в ядре матрицы тогда и только тогда, когда он перпендикулярен любому вектору из пространства строк матрицы .
Размерность пространства строк матрицы называется рангом матрицы , а размерность ядра матрицы называется дефектом матрицы . Эти величины связаны теоремой о ранге и дефекте[en]
- [5]

Левое нуль-пространство (коядро)[править | править код]
Левое нуль-пространство или коядро матрицы состоит из всех векторов , таких что  , где
, где  обозначает транспонирование матрицы. Левое нуль-пространство матрицы — это то же самое, что и ядро матрицы
обозначает транспонирование матрицы. Левое нуль-пространство матрицы — это то же самое, что и ядро матрицы  . Левое нуль-пространство матрицы является ортогональным дополнением пространству столбцов матрицы и двойственно коядру связанного линейного преобразования. Ядро, пространство строк, пространство столбцов
. Левое нуль-пространство матрицы является ортогональным дополнением пространству столбцов матрицы и двойственно коядру связанного линейного преобразования. Ядро, пространство строк, пространство столбцов
и левое нуль-пространство матрицы являются четырьмя фундаментальными подпространствами, ассоциированными с матрицей .
Неоднородные системы линейных уравнений[править | править код]
Ядро играет также большую роль при решении неоднородных систем линейных уравнений:

Пусть векторы  и являются решениями уравнения выше, тогда
и являются решениями уравнения выше, тогда

Таким образом, разность любых двух решений системы  лежит в ядре матрицы .
лежит в ядре матрицы .
Отсюда следует, что любое решение уравнения  может быть выражено как сумма фиксированного решения и какого-либо элемента ядра. То есть множеством решений уравнения является
может быть выражено как сумма фиксированного решения и какого-либо элемента ядра. То есть множеством решений уравнения является

Геометрически это означает, что множество решений уравнения образовано параллельным переносом ядра матрицы на вектор . См. также Альтернатива Фредгольма.
Иллюстрация[править | править код]
Ниже приведена простая иллюстрация вычисления ядра матрицы (см. Вычисление методом Гаусса ниже для метода, более подходящего для более сложных вычислений). Иллюстрация затрагивает также пространства строк и их связь с ядром.
Рассмотрим матрицу

Ядро этой матрицы состоит из всех векторов  , для которых
, для которых

что можно выразить в виде однородной системы линейных уравнений относительно  ,
,  и
и  :
:

Те же самые равенства можно выписать в матричном виде:
![{displaystyle left[{begin{array}{ccc|c}2&3&5&0\-4&2&3&0end{array}}right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5714ae9767da1d68a8826f59d3f1df192764c1a7)
С помощью метода Гаусса матрица может быть сведена к:
![{displaystyle left[{begin{array}{ccc|c}1&0&1/16&0\0&1&13/8&0end{array}}right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3dd8ba9c851e7adfab7845d89e0f4620e56be52d)
Преобразование матрицы в уравнения даёт:

Элементы ядра можно выразить в параметрическом виде следующим образом:

Поскольку  является свободной переменной[en], пробегающей по всем вещественным числам, это выражение можно эквивалентно переписать в виде:
является свободной переменной[en], пробегающей по всем вещественным числам, это выражение можно эквивалентно переписать в виде:

Ядро матрицы — это в точности множество решений этих уравнений (в этом случае прямая через начало координат в  ). Здесь вектор (−1,−26,16)T образует базис ядра матрицы . Дефект матрицы равен 1.
). Здесь вектор (−1,−26,16)T образует базис ядра матрицы . Дефект матрицы равен 1.
Следующие скалярные произведения равны нулю:

что показывает, что вектора ядра матрицы ортогональны каждой вектор-строке матрицы .
Линейная оболочка этих двух (линейно независимых) вектор-строк — это плоскость, ортогональная вектору  .
.
Поскольку ранг матрицы равен 2, размерность ядра матрицы равна 1, а размерность матрицы равна 3, мы имеем иллюстрацию теоремы о ранге и дефекте.
Примеры[править | править код]
-
- ,
- то ядром оператора L является множество решений системы


-
- Тогда ядро of L состоит из всех функций , для которых.

![{displaystyle fin C[0,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/25a99585822ed3d747d8e1febe4659e2aaf92ab3)

-
- Тогда ядро of D состоит из всех функций в , производная которых равна нулю, то есть из всех постоянных функций.


-
- Тогда ядром оператора s будет одномерное подпространство, состоящее из всех векторов .


Вычисления по методу Гаусса[править | править код]
Базис ядра матрицы можно вычислить с помощью метода Гаусса.
Для этой цели, если дана матрица , мы строим сначала расширенную[en] по строкам матрицу ![{displaystyle left[{begin{array}{c}A\hline Eend{array}}right],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8f978cac52a35a542f8d6a1ed29debb8ff2e6d1c) , где
, где  — это
— это  единичная матрица.
единичная матрица.
Если вычислим ступенчатый по столбцам вид матрицы методом Гаусса (или любым другим подходящим методом), мы получим матрицу ![{displaystyle left[{begin{array}{c}B\hline Cend{array}}right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/23eb3e77c6f0f5d0f7b6beb321e501a19ba5190c) Базис ядра матрицы состоит из ненулевых столбцов матрицы
Базис ядра матрицы состоит из ненулевых столбцов матрицы  , таких что соответствующие столбцы матрицы
, таких что соответствующие столбцы матрицы  a нулевые.
a нулевые.
Фактически вычисление может быть остановлено, как только матрица принимает ступенчатый по столбцам вид — остальное вычисление состоит из изменения базиса векторного пространства, образованного столбцами, верхняя часть которых равна нулю.
Например, представим, что
![{displaystyle A=left[{begin{array}{cccccc}1&0&-3&0&2&-8\0&1&5&0&-1&4\0&0&0&1&7&-9\0&0&0&0&0&0end{array}},right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0972372a6a55ce6f1e89d59cd4c80db78f07eb0f)
Тогда
![{displaystyle left[{begin{array}{c}A\hline Eend{array}}right]=left[{begin{array}{cccccc}1&0&-3&0&2&-8\0&1&5&0&-1&4\0&0&0&1&7&-9\0&0&0&0&0&0\hline 1&0&0&0&0&0\0&1&0&0&0&0\0&0&1&0&0&0\0&0&0&1&0&0\0&0&0&0&1&0\0&0&0&0&0&1end{array}}right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/952ce567a3c13d72611dfb429290701721434f5c)
Если привести верхнюю часть с помощью операций над столбцами к ступенчатому виду, получим
![{displaystyle left[{begin{array}{c}B\hline Cend{array}}right]=left[{begin{array}{cccccc}1&0&0&0&0&0\0&1&0&0&0&0\0&0&1&0&0&0\0&0&0&0&0&0\hline 1&0&0&3&-2&8\0&1&0&-5&1&-4\0&0&0&1&0&0\0&0&1&0&-7&9\0&0&0&0&1&0\0&0&0&0&0&1end{array}}right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d12b3c06e06f4ea602e52aa23819eccc250e6ba4)
Последние три столбца матрицы нулевые. Поэтому три последних вектора матрицы ,
![{displaystyle left[!!{begin{array}{r}3\-5\1\0\0\0end{array}}right],;left[!!{begin{array}{r}-2\1\0\-7\1\0end{array}}right],;left[!!{begin{array}{r}8\-4\0\9\0\1end{array}}right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4475f0a687bbd8ed7c618b63795b4b4898daa755)
являются базисом ядра матрицы .
Доказательство, что метод вычисляет ядро: поскольку операции над столбцами соответствуют умножению справа на обратимую матрицу, из факта, что ![{displaystyle left[{begin{array}{c}A\hline Eend{array}}right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/16e875ad15a4391fb44e2e2e89a1e294502b27f2) сводится к
сводится к ![{displaystyle left[{begin{array}{c}B\hline Cend{array}}right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a442c9b2ce18d358183bd22f68108996ffed4240) вытекает, что существует обратимая матрица
вытекает, что существует обратимая матрица  , такая что
, такая что ![{displaystyle left[{begin{array}{c}A\hline Eend{array}}right]P=left[{begin{array}{c}B\hline Cend{array}}right],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7281682377713bd63d90c3906686b919db93094c) где имеет ступенчатый вид. Тогда
где имеет ступенчатый вид. Тогда 
 и
и  Вектор-столбец
Вектор-столбец  принадлежит ядру матрицы (то есть
принадлежит ядру матрицы (то есть  ) тогда и только тогда, когда
) тогда и только тогда, когда  где
где  Так как имеет ступенчатый вид,
Так как имеет ступенчатый вид,  тогда и только тогда, когда ненулевые элементы
тогда и только тогда, когда ненулевые элементы  соответствуют нулевым столбцам матрицы
соответствуют нулевым столбцам матрицы  После умножения на можно сделать вывод, что это случается тогда и только тогда, когда
После умножения на можно сделать вывод, что это случается тогда и только тогда, когда  является линейной комбинацией соответствующих столбцов матрицы
является линейной комбинацией соответствующих столбцов матрицы 
Численные вычисления[править | править код]
Задача вычисления ядра на компьютере зависит от природы коэффициентов.
Точные коэффициенты[править | править код]
Если коэффициенты матрицы заданы как точные числа, ступенчатый вид матрицы может быть вычислен алгоритмом Барейса, который более эффективен, чем метод Гаусса. Ещё более эффективно использование сравнения по модулю и китайской теоремы об остатках, которые сводят задачу к нескольким аналогичным задачам над конечными полями (что сокращает издержки, порождённые нелинейной вычислительной сложностью целочисленного умножения).
Для коэффициентов из конечного поля метод Гаусса работает хорошо, но для больших матриц, которые случаются в криптографии и при вычислении базиса Грёбнера, известны более эффективные алгоритмы, которые имеют почти ту же вычислительную сложность, но работают быстрее и более подходят для современных компьютерных устройств.
Вычисления с плавающей точкой[править | править код]
Для матриц, элементами которых служат числа с плавающей запятой, задача вычисления ядра имеет смысл только для матриц, число строк которых равно её рангу — ввиду ошибок округления[en] матрицы с плавающими значениями почти всегда имеют полный ранг, даже когда они являются аппроксимацией матрицы много меньшего ранга. Даже для матрицы полного ранга можно вычислить её ядро только тогда, когда она хорошо обусловлена, то есть имеет низкое число обусловленности[6].
И для хорошо обусловленной матрицы полного ранга метод Гаусса не ведёт себя корректно: ошибки округления слишком велики для получения значимого результата. Так как вычисление ядра матрицы является специальным случаем решения однородной системы линейных уравнений, ядро может быть вычислено любым алгоритмом, предназначенным для решения однородных систем. Передовым программным обеспечением для этих целей является библиотека Lapack.
См. также[править | править код]
- Ядро (алгебра)
- Нуль функции
- Пространство столбцов
- Пространство функций[en]
- Альтернатива Фредгольма
Примечания[править | править код]
- ↑ The Definitive Glossary of Higher Mathematical Jargon — Null. Math Vault (1 августа 2019). Дата обращения: 9 декабря 2019.
- ↑ Weisstein, Eric W. Kernel. mathworld.wolfram.com. Дата обращения: 9 декабря 2019.
- ↑ Kernel (Nullspace) | Brilliant Math & Science Wiki. brilliant.org. Дата обращения: 9 декабря 2019.
- ↑ Линейная алгебра в том виде, как обсуждается в этой статье, является хорошо проработанной математической дисциплиной, для которой можно найти много книг. Почти весь материал статьи можно найти в лекциях Лея (Lay, 2005), Мейера (Meyer, 2001) и Стренга.
- ↑ 1 2 Weisstein, Eric W. Rank-Nullity Theorem. mathworld.wolfram.com. Дата обращения: 9 декабря 2019.
- ↑ Archived copy. Дата обращения: 14 апреля 2015. Архивировано 29 августа 2017 года.
Литература[править | править код]
- Sheldon Jay Axler. Linear Algebra Done Right. — 2nd. — Springer-Verlag, 1997. — ISBN 0-387-98259-0.
- Гилберт Стренг. Линейная алгебра и её применение. — Москва: «Мир», 1980.
- David C. Lay. Linear Algebra and Its Applications. — 3rd. — Addison Wesley, 2005. — ISBN 978-0-321-28713-7.
- Carl D. Meyer. Matrix Analysis and Applied Linear Algebra. — Society for Industrial and Applied Mathematics (SIAM), 2001. — ISBN 978-0-89871-454-8.
- David Poole. Linear Algebra: A Modern Introduction. — 2nd. — Brooks/Cole, 2006. — ISBN 0-534-99845-3.
- Howard Anton. Elementary Linear Algebra (Applications Version). — 9th. — Wiley International, 2005.
- Steven J. Leon. Linear Algebra With Applications. — 7th. — Pearson Prentice Hall, 2006.
- Serge Lang. Linear Algebra. — Springer, 1987. — ISBN 9780387964126.
- Lloyd N. Trefethen, David III Bau. Numerical Linear Algebra. — SIAM, 1997. — ISBN 978-0-89871-361-9.
Ссылки[править | править код]
- Hazewinkel, Michiel, ed. (2001), Kernel of a matrix, Encyclopedia of Mathematics, Springer, ISBN 978-1-55608-010-4
- Khan Academy, Introduction to the Null Space of a Matrix
Решение. Очевидно,
что данное линейное преобразование
действует
![]()
,
т.к. умножение матриц
![]()
определено, когда количество столбцов
1-й матрицы равно количеству строк
второго вектора (в нашем случае 4), а
полученная матрица имеет размерность
![]()
(т.к. в матрице A
5 строк).
Совокупность N
векторов x
таких, что Ax=0,
называется ядром
преобразования A.
Совокупность M
векторов вида Ax,
когда x
пробегает все R
(в нашем случае
![]()
)
называется образом
пространства
R
при преобразовании A
(другими
словами образ – множество векторов y,
для которых уравнение Ax=y
имеет хотя бы одно решение).
1) Находим ядро.
Пусть
![]()
– вектор столбец. Решаем систему уравнений

.
Решаем систему
методом Гаусса

.
Переменные
![]()
– базисные, а
![]()
– небазисная.
Находим все
фундаментальные решения. В нашем случае
оно одно: положив
![]()
,
получаем
![]()
– который и будет образовывать базис
ядра (т.к. все вектора вида
![]()
отображаются в 0). Размерность базиса
равна 1.
2) Находим образ.
Пусть
– вектор столбец. Решаем систему уравнений
Ax=y.
Для того, чтобы
вектор
![]()
принадлежал образу, необходимо и
достаточно, чтобы ранг матрицы А, и ранг
расширенной матрицы (A|y)совпадали.
Если теперь с помощью эквивалентных
преобразований привести (A|y)
к ступенчатому виду, то получим:

.
Т.к. rang(A)
= 3, то для того чтобы rang(A|y)
=2, необходимо и достаточно, чтобы
.
Находим фундаментальные
решения (базис образа). Т.к. определитель
из коэффициентов при
![]()
:
![]()
,
то
![]()
– базисные, а
![]()
– небазисные.
1-е фундаментальное
решение. Положим
![]()
,
находим решение системы

– первое базисное
решение.
2-е фундаментальное
решение. Положим
![]()
,
находим решение системы

– второе базисное
решение.
3-е фундаментальное
решение. Положим
![]()
,
находим решение системы

– второе базисное
решение.
Итак, размерность
образа равна 3, базис – вектора
![]()
.
(Видно, что
размерность образа + размерность ядра
= размерности пространства R4).
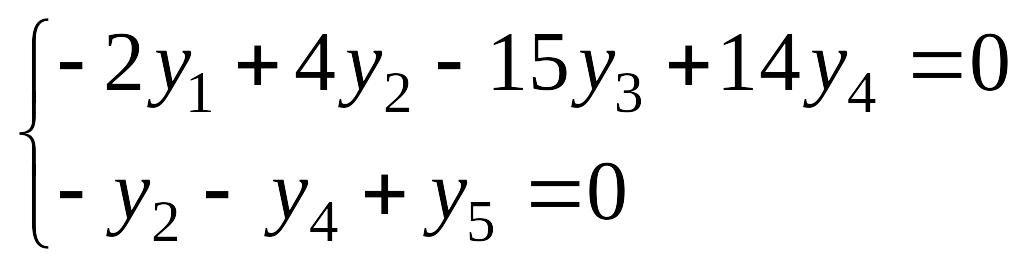
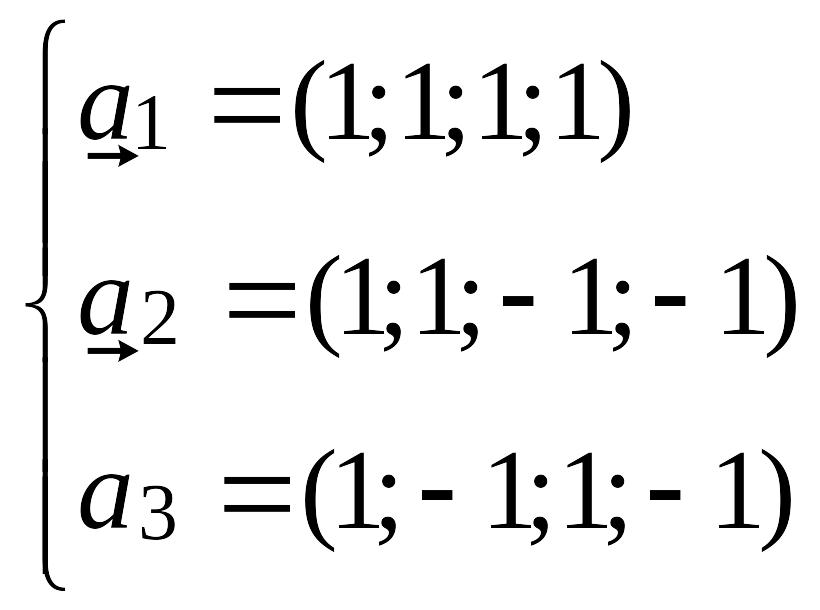
7. Найти размерность пространства и , где , а м – пространство решений системы уравнений .
Решение.
![]()
– ядро,
![]()
– образ. Преобразование
![]()
.
1) Находим ядро.
Решаем систему уравнений

Следовательно,
одно базисное решение
![]()
– базис ядра. Размерность
![]()
.
2) Находим образ.
Пусть
![]()
– вектор столбец. Решаем систему уравнений
Ax=y.
Для того, чтобы
вектор
![]()
принадлежал образу, необходимо и
достаточно, чтобы ранг матрицы А, и ранг
расширенной матрицы (A|y)совпадали.
Если теперь с помощью эквивалентных
преобразований привести (A|y)
к ступенчатому виду, то получим:

.
Т.к. rang(A)
= 2, то для того чтобы rang(A|y)
=2, необходимо и достаточно, чтобы
![]()
Отсюда,
![]()
–
базисная, а
![]()
не базисные переменные.
1-е фундаментальное
решение:
![]()
.
2-е фундаментальное
решение:
![]()
.
Следовательно,
![]()
– базис образа. Размерность
![]()
.
3) Находим
ортогональное дополнение
![]()
.
Т.к. любой вектор
![]()
,
перпендикулярен любому вектору из
,
то заключаем, что скалярное произведение

– фундаментальное
решение системы или базис
![]()
.
4) Найдем базис
линейной оболочки векторов
![]()
,
![]()
.
Т.к.

,
то заключаем, что
,
– базис в
,
и следовательно, размерность
![]()
.
5) Находим пространство
решений системы уравнений
.

– фундаментальное
решение системы или базис M.
6) Находим
ортогональное дополнение
![]()
.
Т.к. любой вектор
![]()
,
перпендикулярен любому вектору из
![]()
,
то заключаем, что скалярное произведение
![]()
.
Отсюда,
![]()
–
базисная, а
![]()
не базисные переменные.
1-е фундаментальное
решение:
![]()
.
2-е фундаментальное
решение:
![]()
.
Следовательно,
![]()
– базис
.
Размерность
![]()
.
7) Найдем базис
линейной оболочки векторов
,
,
,
.
Очевидно, что
![]()
,
а
,
– базис в
,
и следовательно, размерность
![]()
.
8. Пусть U
– подпространство
линейного пространства R4,
являющееся линейной оболочкой. векторов
,
V
– подпространство
линейного пространства R4
являющееся
линейной оболочкой векторов

.
Найдите: базис U
+ V
и
базис
![]()
.
Решение.
1) Находим базис в
U.

rang=3
, сл-но,
![]()
– базис U.
1) Находим базис в
V.

rang=3
, сл-но,
![]()
– базис V.
3) Находим базис в
U
+ V.
Находим линейно
независимые вектора в объединении
![]()
.

![]()
,
а вектора
![]()
– базис U
+ V
, а размерность
dim(U
+ V)=4.
4) Найдем общие
вектора в U
и
V
.
Нам известно, что
в конечномерном пространстве
подпространства могут быть заданы
системами линейных уравнений. Тогда их
пересечение задаётся системой уравнений,
полученной объединением систем, задающих
подпространства.
Система уравнений
задающая U:
Для того, чтобы
вектор
принадлежал линейной оболочке U,
необходимо и достаточно, чтобы ранг
матрицы А и ранг расширенной матрицы
(A|y)совпадали.
Если теперь с помощью эквивалентных
преобразований привести (A|y)
к ступенчатому виду, то получим:

Т.к. rang(A)
= 3, то для того чтобы rang(A|y)
=3, необходимо и достаточно, чтобы
![]()
– искомая система
линейных уравнений.
Система уравнений
задающая V:
Для того, чтобы
вектор
принадлежал линейной оболочке U,
необходимо и достаточно, чтобы ранг
матрицы А и ранг расширенной матрицы
(A|y)совпадали.
Если теперь с помощью эквивалентных
преобразований привести (A|y)
к ступенчатому виду, то получим:

Т.к.
rang(A)
= 3, то для того чтобы rang(A|y)
=3, необходимо и достаточно, чтобы
![]()
– искомая система
линейных уравнений.
Решаем общую
систему:

.
Отсюда фундаментальные
решения (которые получаются при
![]()
и при
![]()
),
а следовательно базис
есть:
![]()
.
9. Подпространство
L1
в R4
порождено векторами (1;-4;6;7) и (0;1;-3;1), а
подпространство L2
– векторами
(0;1;-4;5) и (1;-4;7;-11). Постройте базисы следующих
подпространств: пересечения
![]()
и ортогонального дополнения к сумме
![]()
.
Решение.
1) Находим базис в
L1.
Т.к. матрица, составленная из координат
векторов
![]()
,
имеет ранг=2 (т.к. в ней есть определитель
второго порядка
![]()
),
то заключаем, что вектора
![]()
=(1;-4;6;7)
и
![]()
=(0;1;-3;1)
линейно независимые и образуют базис
в L1.
2) Аналогично,
заключаем, что вектора
![]()
=(0;1;-4;5)
и
![]()
=(1;-4;7;-11)
линейно независимые и образуют базис
в L2.
3) Находим базис
L1+
L2.
Рассматриваем
объединенную систему векторов
=(1;-4;6;7),
=(0;1;-3;1),
=(0;1;-4;5),
=(1;-4;7;-11)
и находим среди
них линейно независимые. Находим ранг
матрицы, столбцами которой являются
координаты
![]()
:

.
Ранг = 4, следовательно,
все вектора
– линейно независимые и образуют базис
в L1+
L2.
4)
Находим базис ортогонального дополнения
.
Каждый вектор из
![]()
ортогонален любому вектору из L1+
L2.
Следовательно, скалярные произведения
на вектора базиса из L1+
L2
равны 0. Получаем однородную систему
![]()
.
Т.к. определитель
системы не равен 0 (показано выше, что
ранг=4), то система имеет единственное
тривиальное решение
![]()
.
Следовательно,
состоит
только из одного вектора
![]()
.
(Это и так было
видно, т.к. линейная оболочка
![]()
,
ибо 4 линейно независимых вектора
образуют базис в
![]()
,
а
![]()
).
5) Находим систему
уравнений описывающую L1.
Для того, чтобы
вектор
принадлежал линейной оболочке
,
необходимо и достаточно, чтобы ранг
матрицы А – составленной из координат
векторов
,
и ранг расширенной матрицы (A|y)совпадали.
Если теперь с помощью эквивалентных
преобразований привести (A|y)
к ступенчатому виду, то получим:

.
Т.к. rang(A)
= 2, то для того чтобы rang(A|y)
=2, необходимо и достаточно, чтобы
![]()
– искомая система
линейных уравнений.
Находим систему
уравнений описывающую L2.
Для того, чтобы
вектор
принадлежал линейной оболочке
,
необходимо и достаточно, чтобы ранг
матрицы А – составленной из координат
векторов
,
и ранг расширенной матрицы (A|y)совпадали.
Если теперь с помощью эквивалентных
преобразований привести (A|y)
к ступенчатому виду, то получим:

.
Т.к. rang(A)
= 2, то для того чтобы rang(A|y)
=2, необходимо и достаточно, чтобы
![]()
– искомая система
линейных уравнений.
Решаем общую
систему:
![]()
Т.к. определитель
матрицы коэффициентов
![]()
,
то система имеет единственное решение
![]()
.
Следовательно,
состоит из
одного вектора (0;0;0;0).
(Это и так было
видно, т.к. вектора
– линейно независимые,
линейные оболочки
![]()
и
![]()
не имеют общих (кроме нулевого) векторов,
т.к. линейная комбинация векторов
![]()
не может дать вектора
![]()
,
а следовательно и их линейные комбинации).
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Ядро и образ линейного отображения
Ядром линейного отображения называется множество таких векторов
, что
, т.е. множество векторов из
, которые отображаются в нулевой вектор пространства
. Ядро отображения
обозначается:
Образом линейного отображения называется множество образов
всех векторов
из
. Образ отображения
обозначается
или
Заметим, что символ следует отличать от
— мнимой части комплексного числа.
Примеры ядер и образов линейных отображений
1. Ядром нулевого отображения является все пространство
, а образом служит один нулевой вектор, т.е.
2. Рассмотрим отображение , которое ставит в соответствие каждому вектору
n-мерного линейного пространства
его координатный столбец
относительно заданного базиса
. Ядром этого отображения является нулевой вектор
пространства
, поскольку только этот вектор имеет нулевой координатный столбец
. Образ преобразования
совпадает со всем пространством
, так как это преобразование сюръективно (любой столбец из
является координатным столбцом некоторого вектора пространства
).
3. Рассмотрим отображение , которое каждому вектору
n-мерного евклидова пространства
ставит в соответствие алгебраическое значение
его проекции на направление, задаваемое единичным вектором
. Ядром этого преобразования является ортогональное дополнение
— множество векторов, ортогональных
. Образом является все множество действительных чисел
.
4. Рассмотрим отображение , которое каждому многочлену степени не выше
ставит в соответствие его производную. Ядром этого отображения является множество
многочленов нулевой степени, а образом — все пространство
.
Свойства ядра и образа линейного отображения
1. Ядро любого линейного отображения является подпространством:
.
В соответствии с определением требуется доказать, что множество является непустым и замкнутым относительно операций сложения векторов и умножения вектора на число. В самом деле, из однородности отображения следует, что
т.е. нулевой вектор отображается в нулевой вектор
. Следовательно, ядро любого линейного отображения не является пустым и содержит, по крайней мере, нулевой элемент:
. Покажем, что множество
замкнуто по отношению к операциям сложения векторов и умножения вектора на число. Действительно:
Следовательно, множество является линейным подпространством пространства
.
2. Образ любого линейного отображения является подпространством:
.
В самом деле, докажем, например, замкнутость множества по отношению к операции умножения вектора на число. Если
, то существует вектор
такой, что
. Тогда
, то есть
.
Поскольку ядро и образ линейного отображения являются линейными подпространствами (свойства 1 и 2), можно говорить об их размерностях.
Дефектом линейного отображения называется размерность его ядра: , а рангом линейного отображения — размерность его образа:
.
3. Ранг линейного отображения равен рангу его матрицы (определенной относительно любых базисов).
В самом деле, если любой базис пространства
, то
. Поэтому максимальное число линейно независимых векторов системы
(ранг системы векторов) равно максимальному числу линейно независимых столбцов матрицы
отображения, т.е. рангу матрицы:
.
4. Линейное отображение инъективно тогда и только тогда, когда
, другими словами, когда дефект отображения равен нулю:
.
Действительно, образом нулевого вектора служит нулевой вектор
. Поэтому, если отображение инъективно, то ядро содержит только нулевой вектор
, иначе два разных вектора имели бы один и тот же образ
. Обратно, при условии
разные векторы
не могут иметь одинаковые образы
, так как в этом случае из равенств
, следует, что ненулевой вектор
(приходим к противоречию).
5. Линейное отображение сюръективно тогда и только тогда, когда
, другими словами, когда ранг отображения равен размерности пространства образов:
.
6. Линейное отображение биективно (значит, обратимо) тогда и только тогда, когда
и
одновременно.
Теорема (9.1) о размерностях ядра и образа. Сумма размерностей ядра и образа любого линейного отображения равна размерности пространства прообразов:
(9.3)
Действительно, пусть . Выберем в подпространстве
базис
и дополним его векторами
до базиса
всего пространства
. Покажем, что векторы
образуют базис подпространства
.
Во-первых, , так как образ любого вектора
линейно выражается через векторы
Во-вторых, образующие линейно независимы. Если их линейная комбинация равна нулевому вектору:
то вектор принадлежит ядру (его образ — нулевой вектор). Однако, по построению этот вектор принадлежит алгебраическому дополнению
. Учитывая, что
, заключаем:
. Получили разложение нулевого вектора по линейно независимой системе
векторов, значит, все коэффициенты
. Поэтому равенство
справедливо только для тривиальной линейной комбинации, т.е. система векторов
линейно независимая.
Таким образом, векторы образуют базис подпространства
, а его размерность определяется количеством базисных векторов, т.е.
, что равносильно (9.3).
Следствие. Линейное отображение биективно (значит, обратимо) тогда и только тогда, когда обратима его матрица (определенная относительно любых базисов).
Действительно, для обратимости преобразования (см. свойство 6) его матрица
(размеров
) должна удовлетворять условиям (см. свойства 3,4,5):
Тогда по теореме 9.1 заключаем, что , т.е. матрица
— квадратная n-го порядка и невырожденная
, что и требовалось доказать.
Обратимые линейные отображения называются также невырожденными (имея в виду невырожденность их матрицы).
Математический форум (помощь с решением задач, обсуждение вопросов по математике).
Если заметили ошибку, опечатку или есть предложения, напишите в комментариях.
Матрица линейного оператора примеры
Построение матрицы по заданной формуле отображения.
Пусть отображение задано с помощью формулы:

то есть для координат произвольного исходного вектора определены координаты его образа. Тогда, рассматривая вместо произвольного вектора x вектор  , найдём его образ, это будет вектор
, найдём его образ, это будет вектор  . Для этого в формуле, задающей образ вектора, полагаем
. Для этого в формуле, задающей образ вектора, полагаем  ,
,  ,…,
,…,  . Аналогично находим образы для
. Аналогично находим образы для  ,…,
,…,  . Из координат образа вектора
. Из координат образа вектора  составляем 1-й столбец матрицы линейного оператора, аналогично из координат последующих векторов – остальные столбцы. Рассмотрим на примере.
составляем 1-й столбец матрицы линейного оператора, аналогично из координат последующих векторов – остальные столбцы. Рассмотрим на примере.
Пример 1. Пусть оператор задан с помощью формулы:
 .
.
Прежде всего, докажем, что это отображение – действительно линейный оператор.
Отобразим сумму векторов:
 Теперь каждую координату получившегося вектора можем преобразовать:
Теперь каждую координату получившегося вектора можем преобразовать:



 .
.
Аналогично для умножения на константу:


Для того чтобы найти матрицу этого линейного оператора, нужно, как было сказано выше, подставить значения x1 = 1, x2 = 0, а затем x1 = 0, x2 = 1. В этом примере образы базисных векторов – соответственно (3, 1) и (2, -1).
Поэтому матрица линейного оператора будет иметь вид:
 .
.
Аналогичным способом решается задача и для 3 и большего количества переменных.
Пример 2.  .
.
Построим матрицу оператора. Отображая вектор (1,0,0), получаем (1,4,-1), соответственно (0,1,0) переходит в (2,1,-2), а вектор (0,0,1) – в (-1,1,3).
Матрица линейного оператора:
 .
.
2.2. Построение матрицы оператора в случае, когда известен исходный базис и система векторов, в которую он отображается.
Если задана система  из n векторов, образующих базис, и какая-нибудь произвольная система n векторов
из n векторов, образующих базис, и какая-нибудь произвольная система n векторов  (возможно, линейно-зависимая), то однозначно определён линейный оператор, отображающий каждый вектор первой системы в соответствующий вектор второй системы.
(возможно, линейно-зависимая), то однозначно определён линейный оператор, отображающий каждый вектор первой системы в соответствующий вектор второй системы.
Матрицу этого оператора можно найти двумя способами: с помощью обратной матрицы и с помощью системы уравнений.
Пусть  – матрица оператора в базисе
– матрица оператора в базисе  . По условию,
. По условию,  для всех индексов
для всех индексов  . Данные n равенств можно записать в виде одного матричного равенства:
. Данные n равенств можно записать в виде одного матричного равенства:  , при этом столбцы матрицы
, при этом столбцы матрицы  – это векторы , а столбцы матрицы
– это векторы , а столбцы матрицы  – векторы . Тогда матрица может быть найдена в виде
– векторы . Тогда матрица может быть найдена в виде  .
.
Пример. Найти матрицу линейного оператора, отображающего базис
 в систему векторов
в систему векторов  .
.
Здесь  ,
,  ,
,  , и получаем:
, и получаем:
 .
.
Проверка осуществляется умножением получившейся матрицы на каждый вектор:  .
.
Аналогично решаются подобные задачи и для трёхмерного пространства. В приложении (§5) есть несколько вариантов таких задач.
2.3. Прочие способы нахождения матрицы оператора.
Существуют также примеры, где линейный оператор задаётся другими способами, отличными от рассмотренных в п. 2.1 и 2.2.
Пример. Линейными операторами являются как правое, так и левое векторное умножение на фиксированный вектор в трёхмерном пространстве, то есть отображения вида  и
и  . Построим матрицу одного из этих операторов, . Для этого найдём образы всех трёх базисных векторов линейного пространства.
. Построим матрицу одного из этих операторов, . Для этого найдём образы всех трёх базисных векторов линейного пространства.
 .
.
Аналогично,  ,
,
 .
.
Координаты полученных векторов запишем в виде столбцов матрицы оператора.
Матрица оператора:  .
.
Аналогично можно построить матрицу линейного оператора :
 .
.
Пример. Линейный оператор дифференцирования в пространстве всех многочленов степени не более n. Это пространство размерности n + 1. Возьмём в качестве базиса элементы  ,
,  ,
,  ,…,
,…,  .
.
 ,
,  ,
,  , аналогично получим
, аналогично получим  ,…,
,…,  .
.
Матрица этого линейного оператора:
Линейные операторы могут отображать не только пространства конечной размерности, но и бесконечномерные пространства. Так, оператор дифференцирования может рассматриваться также в пространстве всех непрерывных функций. (В этом пространстве нет конечного базиса). В этом случае, очевидно, оператор не может быть задан матрицей конечного порядка.
Не нашли то, что искали? Воспользуйтесь поиском:
Лучшие изречения: Для студента самое главное не сдать экзамен, а вовремя вспомнить про него. 10219 –  | 7588 –
| 7588 –  или читать все.
или читать все.
91.146.8.87 © studopedia.ru Не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования. Есть нарушение авторского права? Напишите нам | Обратная связь.
Отключите adBlock!
и обновите страницу (F5)
очень нужно
Матрица линейного оператора
Определение 1. Если задан закон, который каждому вектору x?? ставит в соот ветствие вектор y . то говорят, что в линейном пространстве ? задан оператор A , при этом пишут:
Определение 2. Оператор A называется линейным, если для любых x 1 ?? и x 2 ?? и произвольного числа ? выполняются условия:
Рассмотрим теперь в евклидовом пространстве E n базис e 1 ,e 2 . e n и пусть в этом пространстве определён линейный оператор A : y = A x .
Разложим векторы x и y по базису e 1 ,e 2 . e n :

В силу линейности оператора A можно написать
Заметим, что каждый вектор  , следовательно, его также можно разложить по базису e 1 ,e 2 . e n , т.е.
, следовательно, его также можно разложить по базису e 1 ,e 2 . e n , т.е.


В силу единственности разложения по данному базису мы можем при равнять коэффициенты при базисных векторах в правых частях формул (1) и (2); тогда получим:
Получили, что линейному оператору A в данном базисе соответствует квадратная матрица
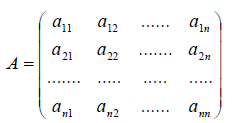
которая называется матрицей линейного оператора A , i -й столбец которой состоит из координат вектора Ae i (i = 1,2. n ) относительно данного базиса. Отметим, что матрица A оператора A зависит от выбора базиса e 1 ,e 2 . e n .
Итак, мы показали, что всякому линейному оператору A в евклидовом пространстве E n соответствует матрица A ; можно доказать и обратное утверждение: всякую квадратную матрицу A можно рассматривать как матрицу некоторого линейного оператора A в данном базисе e 1 ,e 2 . e n .
Представляют интерес невырожденные линейные операторы, т.е. такие операторы, матрицы которых имеют обратную A -1 , т.е. также являются невырожденными. В этом случае каждому вектору y (образу), определённому соотношением, отвечает единственный вектор x (прообраз) и при этом имеет место матричное равенство: X = A -1 ? Y .
Примеры линейных операторов
1. В пространстве 2-мерных векторов линейным оператором является правило
связывающее вектор-прообраз  с вектором-образом
с вектором-образом 
2. В пространстве бесконечно дифференцируемых функций линейным оператором является операция дифференцирования, ставящая в соответствие каждому элементу этого простран ства его производную функцию.
3. В пространстве многочленов P n (t) линейным оператором является операция умножения многочлена на независимую переменную t .
Пример: Известны образы базисных векторов E 3 под действием оператора A :
Найти матрицу этого оператора в исходном базисе.
Решение: По определению y = A x, значит в матричном виде можно записать, что A = X -1 Y . Для нашего примера получаем

Действия над операторами
Сложение линейных операторов. Пусть x?E n , A и B – два линейных оператора в этом пространстве.
Определение 1. Суммой линейных операторов A и B в E n называется оператор C, определяемый равенством Cx = A x + Bx , где x – любой вектор из E n .
Сумма линейных операторов является линейным оператором, причём его матрица C = A + B, где A и B – матрицы линейных операторов A и B .
Умножение линейного оператора на число. Пусть x?E n , линейный оператор A определён в E n , ? – некоторое число.
Определение 2. Произведением линейного оператора A на число ? называется оператор ?A , определяемый равенством  .
.
?A является линейным оператором, а матрица этого линейного оператора получается из матрицы A умножением её на число ? , т.е. она равна ? ? A.
Умножение линейных операторов. Пусть x? E n , y ? E n , z ? E n и кроме того в E n определены линейные операторы A и B таким образом, что y = Bx, z = A y .
Определение 3. Произведением A ? B линейных операторов A и B называется оператор C, определяемый соотношением Cx = A (Bx) .
Таким образом, перемножение линейных операторов состоит в последовательном их применении по отношению к вектору x .
Рассмотрим матрицы – столбцы:
и обозначим через A, B и C – соответственно матрицы линейных операторов A, B и C. Тогда Z = A ? (B ? X) = (A ? B) ? X = C ? X , таким образом, C = A ? B, т.е. матрица произведения линей ных операторов также является линейным оператором.
a) (A ? B)(x + y) = A (B(x + y)) = A (Bx + By) = A (Bx) + A (By) = = (A ? B) ? x + (A ? B) ? y
б) (A ? B)(? x) = A (B(? x)) = A (?Bx) =?A (Bx) =? (A ? B)x
Свойства умножения линейных операторов вытекают из свойств умножения матриц.
Определение 4. Линейные операторы A и В называются равными, если 
 . Равенство операторов обозначается как A = B .
. Равенство операторов обозначается как A = B .
Определение 5. Оператор E называется единичным (или тождественным) оператором, если каждому элементу x линейного пространства  он ставит в соответствие тот же самый элемент, то есть
он ставит в соответствие тот же самый элемент, то есть 
1. Понятие линейного оператора
Пусть R и S линейные пространства, которые имеют размерность n и m соответственно. Оператором A действующим из R в S называется отображение вида  , сопоставляющее каждому элементу x пространства R некоторый элемент y пространства S. Для этого отображения будем использовать обозначение y= A(x) или y= Ax.
, сопоставляющее каждому элементу x пространства R некоторый элемент y пространства S. Для этого отображения будем использовать обозначение y= A(x) или y= Ax.
Определение 1. Оператор A действующий из R в S называется линейным, если для любых элементов x1 и x2 пространства R и любого λ из числового поля K выполняются соотношения
Если пространство S совпадает с пространством R, то линейный оператор, который действует из R в R называют линейным преобразованием пространства R.
Пусть заданы два векторных пространства n-мерный R и m-мерный S, и пусть в этих пространствах заданы базисы  и
и  соответственно. Пусть задано отображение
соответственно. Пусть задано отображение
где A – m×n -матрица с коэффициентами из поля K. Тогда каждому элементу из R соответствует элемент y=Ax из S. Отображение (1) определяет оператор A. Покажем, что этот оператор обладает свойством линейности. Действительно, учитывая свойства умножения матриц, можно записать:
Покажем теперь обратное, т.е. что для любого линейного оператора A, отображающего пространство R в S и произвольных базисов и в R и S соответственно, существует такая матрица A с элементами из численного поля K, что определяемое этой матрицей линейное отображение (1) выражает координаты отображенного вектора y через координаты исходного вектора x.
Пусть x − произвольный элемент в R. Тогда
 |
(3) |
является разложением x в по базису .
Применим оператор A к базисным векторам :
 |
(4) |
где aij − координаты полученного вектора в базисе .
Тогда применяя оператор A к элементу x и учитывая (3) и (4), имеем
Сделаем следующее обозначение:
 |
(6) |
Тогда равенство (5) примет следующий вид:
 |
(7) |
Из равенства (7) следует, что любой элемент из пространства R при отображении оператором A, в пространстве S и в базисе имеет координаты yi, i=1,2. m. В свою очередь, из (6) следует, что этим координатам соответствуют линейные комбинации координатов элемента xj, j=1,2. n с коэффициентами aij i=1,2. m; j=1,2. n.
Построим матрицу A с элементами aij:
 |
(8) |
Тогда выражение (6) можно записать в матричном виде:
Матрица A называется матрицей линейного оператора в заданных базисах и .
2. Сложение линейных операторов
Пусть A и B два линейных оператора действующих из R в S и пусть A и B – mxn − матрицы соответствующие этим операторам.
Определение 2. Суммой линейных операторов A и B называется оператор C, определяемый равенством
где x∈R означает, что x принадлежит пространстве R.
Сумма линейных операторов обозначается так C=A+B. Легко убедится, что сумма линейных операторов также является линейным оператором.
Применим оператор C к базисному вектору ej, тогда:
| Cej= Aej+ Bej= | n | (aij+bij) ej |
| ∑ | ||
| j= 1 |
Следовательно оператору C отвечает матрица  ,где i=1,2. m, j=1,2. n, т.е.
,где i=1,2. m, j=1,2. n, т.е.
3. Умножение линейных операторов
Пусть заданы три линейных пространства R, S и T. Пусть линейный оператор B отображает R в S, а линейный оператор A отображает S в T.
Определение 3. Произведением операторов A и B называется оператор C, для которого выполняется следующее равенство при любом x из R:
Произведение линейных операторов обозначается C=AB. Легко убедится, что произведение линейных операторов также является линейным оператором.
Таким образом оператор C отображает пространство R в T. Выберем в пространствах R, S и T базисы и обозначим через A, B и C матрицы операторов A, B и C соответствующие этим базисам. Тогда отображения линейных операторов A, B, C
можно записать в виде матричных равенств
где x, y, z − векторы x, y, z − представленные в виде координатных столбцов. Тогда
Учитывая произвольность х, получим
Следовательно произведению операторов C=AB соответствует матричное произведение C=AB.
4. Умножение линейного оператора на число
Пусть задан линейный оператор A отображающий R в S и некоторое число λ из поля K.
Определение 4. Произведением оператора A на число λ называется оператор C, для которого выполняется следующее равенство при любом x из R:
Таким образом оператор C отображает пространство R в S. Выберем в пространствах R и S базисы и обозначим через A матрицу оператора A соответствующее этим базисам векторные равенства
можно записать в виде матричных равенств
где x, y, z − векторы x, y, z − представленные в виде координатных столбцов. Тогда
Учитывая произвольность х, получим
Следовательно произведению оператора C на число λ соответствует произведение матрицы A на число λ.
5. Нулевой оператор
Оператор, отображающий все элементы пространства R в нулевой элемент пространства S называется нулевым оператором и обозначается через O. Действие нулевого оператора можно записать так:
6. Противоположный оператор
Противоположным оператору A называется оператор −A удовлетворяющий равенству:
7. Ядро линейного оператора
Определение 5. Ядром линейного оператора A называется множество всех тех элементов x пространства R, для которых выполняется следующее равенство: Ax=0.
Ядро линейного оператора также называют дефектом оператора. Ядро линейного оператора обозначается символом ker A.
8. Образ линейного оператора
Определение 6. Образом линейного оператора A называется множество всех элементов y пространства R, для которых выполняется следующее равенство: y=Ax для всех x из R.
Образ линейного оператора обозначается символом im A.
9. Ранг линейного оператора
Определение 7. Рангом линейного оператора A обозначаемое символом rang A называется число равное размерности образа im A оператора A, т.е.: rang A=dim(im A).
Ядро и образ линейного отображения
Ядром линейного отображения называется множество таких векторов , что , т.е. множество векторов из , которые отображаются в нулевой вектор пространства . Ядро отображения обозначается:
Образом линейного отображения называется множество образов всех векторов из . Образ отображения обозначается или
Заметим, что символ следует отличать от — мнимой части комплексного числа.
Примеры ядер и образов линейных отображений
1. Ядром нулевого отображения является все пространство , а образом служит один нулевой вектор, т.е.
2. Рассмотрим отображение , которое ставит в соответствие каждому вектору n-мерного линейного пространства его координатный столбец относительно заданного базиса . Ядром этого отображения является нулевой вектор пространства , поскольку только этот вектор имеет нулевой координатный столбец . Образ преобразования совпадает со всем пространством , так как это преобразование сюръективно (любой столбец из является координатным столбцом некоторого вектора пространства ).
3. Рассмотрим отображение , которое каждому вектору n-мерного евклидова пространства ставит в соответствие алгебраическое значение его проекции на направление, задаваемое единичным вектором . Ядром этого преобразования является ортогональное дополнение — множество векторов, ортогональных . Образом является все множество действительных чисел .
4. Рассмотрим отображение , которое каждому многочлену степени не выше ставит в соответствие его производную. Ядром этого отображения является множество многочленов нулевой степени, а образом — все пространство .
Свойства ядра и образа линейного отображения
1. Ядро любого линейного отображения является подпространством: .
В соответствии с определением требуется доказать, что множество является непустым и замкнутым относительно операций сложения векторов и умножения вектора на число. В самом деле, из однородности отображения следует, что
т.е. нулевой вектор отображается в нулевой вектор . Следовательно, ядро любого линейного отображения не является пустым и содержит, по крайней мере, нулевой элемент: . Покажем, что множество замкнуто по отношению к операциям сложения векторов и умножения вектора на число. Действительно:
Следовательно, множество является линейным подпространством пространства .
2. Образ любого линейного отображения является подпространством: .
В самом деле, докажем, например, замкнутость множества по отношению к операции умножения вектора на число. Если , то существует вектор такой, что . Тогда , то есть .
Поскольку ядро и образ линейного отображения являются линейными подпространствами (свойства 1 и 2), можно говорить об их размерностях.
Дефектом линейного отображения называется размерность его ядра: , а рангом линейного отображения — размерность его образа: .
3. Ранг линейного отображения равен рангу его матрицы (определенной относительно любых базисов).
В самом деле, если любой базис пространства , то . Поэтому максимальное число линейно независимых векторов системы (ранг системы векторов) равно максимальному числу линейно независимых столбцов матрицы отображения, т.е. рангу матрицы: .
4. Линейное отображение инъективно тогда и только тогда, когда , другими словами, когда дефект отображения равен нулю: .
Действительно, образом нулевого вектора служит нулевой вектор . Поэтому, если отображение инъективно, то ядро содержит только нулевой вектор , иначе два разных вектора имели бы один и тот же образ . Обратно, при условии разные векторы не могут иметь одинаковые образы , так как в этом случае из равенств , следует, что ненулевой вектор (приходим к противоречию).
5. Линейное отображение сюръективно тогда и только тогда, когда , другими словами, когда ранг отображения равен размерности пространства образов: .
6. Линейное отображение биективно (значит, обратимо) тогда и только тогда, когда и одновременно.
Теорема (9.1) о размерностях ядра и образа. Сумма размерностей ядра и образа любого линейного отображения равна размерности пространства прообразов:
Действительно, пусть . Выберем в подпространстве базис и дополним его векторами до базиса всего пространства . Покажем, что векторы образуют базис подпространства .
Во-первых, , так как образ любого вектора линейно выражается через векторы
Во-вторых, образующие линейно независимы. Если их линейная комбинация равна нулевому вектору:
то вектор принадлежит ядру (его образ — нулевой вектор). Однако, по построению этот вектор принадлежит алгебраическому дополнению . Учитывая, что , заключаем: . Получили разложение нулевого вектора по линейно независимой системе векторов, значит, все коэффициенты . Поэтому равенство справедливо только для тривиальной линейной комбинации, т.е. система векторов линейно независимая.
Таким образом, векторы образуют базис подпространства , а его размерность определяется количеством базисных векторов, т.е. , что равносильно (9.3).
Следствие. Линейное отображение биективно (значит, обратимо) тогда и только тогда, когда обратима его матрица (определенная относительно любых базисов).
Действительно, для обратимости преобразования (см. свойство 6) его матрица (размеров ) должна удовлетворять условиям (см. свойства 3,4,5):
Тогда по теореме 9.1 заключаем, что , т.е. матрица — квадратная n-го порядка и невырожденная , что и требовалось доказать.
Обратимые линейные отображения называются также невырожденными (имея в виду невырожденность их матрицы).
Линейные операторы
1. Понятие линейного оператора
Пусть R и S линейные пространства, которые имеют размерность n и m соответственно. Оператором A действующим из R в S называется отображение вида , сопоставляющее каждому элементу x пространства R некоторый элемент y пространства S. Для этого отображения будем использовать обозначение y= A(x) или y= Ax.
Определение 1. Оператор A действующий из R в S называется линейным, если для любых элементов x1 и x2 пространства R и любого λ из числового поля K выполняются соотношения
Если пространство S совпадает с пространством R, то линейный оператор, который действует из R в R называют линейным преобразованием пространства R.
Пусть заданы два векторных пространства n-мерный R и m-мерный S, и пусть в этих пространствах заданы базисы и соответственно. Пусть задано отображение
где A – m×n -матрица с коэффициентами из поля K. Тогда каждому элементу из R соответствует элемент y=Ax из S. Отображение (1) определяет оператор A. Покажем, что этот оператор обладает свойством линейности. Действительно, учитывая свойства умножения матриц, можно записать:
Покажем теперь обратное, т.е. что для любого линейного оператора A, отображающего пространство R в S и произвольных базисов и в R и S соответственно, существует такая матрица A с элементами из численного поля K, что определяемое этой матрицей линейное отображение (1) выражает координаты отображенного вектора y через координаты исходного вектора x.
Пусть x − произвольный элемент в R. Тогда
|
(3) |
является разложением x в по базису .
Применим оператор A к базисным векторам :
|
(4) |
где aij − координаты полученного вектора в базисе .
Тогда применяя оператор A к элементу x и учитывая (3) и (4), имеем
Сделаем следующее обозначение:
|
(6) |
Тогда равенство (5) примет следующий вид:
|
(7) |
Из равенства (7) следует, что любой элемент из пространства R при отображении оператором A, в пространстве S и в базисе имеет координаты yi, i=1,2. m. В свою очередь, из (6) следует, что этим координатам соответствуют линейные комбинации координатов элемента xj, j=1,2. n с коэффициентами aij i=1,2. m; j=1,2. n.
Построим матрицу A с элементами aij:
|
(8) |
Тогда выражение (6) можно записать в матричном виде:
Матрица A называется матрицей линейного оператора в заданных базисах и .
2. Сложение линейных операторов
Пусть A и B два линейных оператора действующих из R в S и пусть A и B – mxn − матрицы соответствующие этим операторам.
Определение 2. Суммой линейных операторов A и B называется оператор C, определяемый равенством
где x∈R означает, что x принадлежит пространстве R.
Сумма линейных операторов обозначается так C=A+B. Легко убедится, что сумма линейных операторов также является линейным оператором.
Применим оператор C к базисному вектору ej, тогда:
| Cej= Aej+ Bej= | n | (aij+bij) ej |
| ∑ | ||
| j= 1 |
Следовательно оператору C отвечает матрица ,где i=1,2. m, j=1,2. n, т.е.
3. Умножение линейных операторов
Пусть заданы три линейных пространства R, S и T. Пусть линейный оператор B отображает R в S, а линейный оператор A отображает S в T.
Определение 3. Произведением операторов A и B называется оператор C, для которого выполняется следующее равенство при любом x из R:
Произведение линейных операторов обозначается C=AB. Легко убедится, что произведение линейных операторов также является линейным оператором.
Таким образом оператор C отображает пространство R в T. Выберем в пространствах R, S и T базисы и обозначим через A, B и C матрицы операторов A, B и C соответствующие этим базисам. Тогда отображения линейных операторов A, B, C
можно записать в виде матричных равенств
где x, y, z − векторы x, y, z − представленные в виде координатных столбцов. Тогда
Учитывая произвольность х, получим
Следовательно произведению операторов C=AB соответствует матричное произведение C=AB.
4. Умножение линейного оператора на число
Пусть задан линейный оператор A отображающий R в S и некоторое число λ из поля K.
Определение 4. Произведением оператора A на число λ называется оператор C, для которого выполняется следующее равенство при любом x из R:
Таким образом оператор C отображает пространство R в S. Выберем в пространствах R и S базисы и обозначим через A матрицу оператора A соответствующее этим базисам векторные равенства
можно записать в виде матричных равенств
где x, y, z − векторы x, y, z − представленные в виде координатных столбцов. Тогда
Учитывая произвольность х, получим
Следовательно произведению оператора C на число λ соответствует произведение матрицы A на число λ.
5. Нулевой оператор
Оператор, отображающий все элементы пространства R в нулевой элемент пространства S называется нулевым оператором и обозначается через O. Действие нулевого оператора можно записать так:
6. Противоположный оператор
Противоположным оператору A называется оператор −A удовлетворяющий равенству:
7. Ядро линейного оператора
Определение 5. Ядром линейного оператора A называется множество всех тех элементов x пространства R, для которых выполняется следующее равенство: Ax=0.
Ядро линейного оператора также называют дефектом оператора. Ядро линейного оператора обозначается символом ker A.
8. Образ линейного оператора
Определение 6. Образом линейного оператора A называется множество всех элементов y пространства R, для которых выполняется следующее равенство: y=Ax для всех x из R.
Образ линейного оператора обозначается символом im A.
9. Ранг линейного оператора
Определение 7. Рангом линейного оператора A обозначаемое символом rang A называется число равное размерности образа im A оператора A, т.е.: rang A=dim(im A).
[spoiler title=”источники:”]
http://mathhelpplanet.com/static.php?p=yadro-i-obraz-linyeinogo-otobrazheniya
http://matworld.ru/linear-algebra/linear-operator.php
[/spoiler]
Решение.
Множество  всех векторов
всех векторов  называется образом оператора A.
называется образом оператора A.
То есть  в том и только том случае, когда найдется вектор $xin R^3$ такой, что $y=Ax$ или, в координатной записи,
в том и только том случае, когда найдется вектор $xin R^3$ такой, что $y=Ax$ или, в координатной записи,

Найдем ядро оператора.
Определение. Ядром (или нуль-пространством) линейного оператора  называется множество всех элементов из V , которые отображаются линейным оператором A в нулевой вектор. Ядро оператора A обозначается ker A.
называется множество всех элементов из V , которые отображаются линейным оператором A в нулевой вектор. Ядро оператора A обозначается ker A. 
В соответствии с определением ядра



Итак, ядром оператора A является точка 
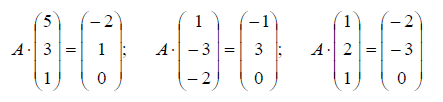
Найдем собственные вектора заданного линейного оператора.
Число  есть собственное число оператора
есть собственное число оператора  в том и только том случае, когда
в том и только том случае, когда  . Запишем характеристическое уравнение:
. Запишем характеристическое уравнение:

Решая его, имеем

Таким образом, получаем собственные числа оператора:

Для каждого из полученных собственных значений найдем собственные векторы.
Их можно найти их системы  .
.
А) 

Решим однородную систему уравнений.

Матрица коэффициентов  имеет ранг 1. Выберем в качестве базисного минора
имеет ранг 1. Выберем в качестве базисного минора  Тогда, полагая
Тогда, полагая  , имеем
, имеем

Таким образом, общее решение системы
 .
.
Из общего решения находим фундаментальную систему решений:
 .
.
С использованием фундаментальной системы решений, общее решение может быть записано в виде  .
.
Б) ![]()
Решим однородную систему уравнений.

Матрица коэффициентов  имеет ранг 1. Выберем в качестве базисного минора
имеет ранг 1. Выберем в качестве базисного минора  Тогда, полагая
Тогда, полагая  имеем
имеем 
Таким образом, общее решение системы  .
.
Из общего решения находим фундаментальную систему решений:  .
.
С использованием фундаментальной системы решений, общее решение может быть записано в виде  .
.
Ответ:

Собственные числа оператора: ![]()
Собственные векторы: ; .
