3.1. Равнопеременное движение по прямой.
3.1.1. Равнопеременное движение по прямой — движение по прямой с постоянным по модулю и направлению ускорением: 
3.1.2. Ускорение ( ) — физическая векторная величина, показывающая, на сколько изменится скорость за 1 с.
) — физическая векторная величина, показывающая, на сколько изменится скорость за 1 с.
В векторном виде:

где  — начальная скорость тела,
— начальная скорость тела,  — скорость тела в момент времени t.
— скорость тела в момент времени t.
В проекции на ось Ox:

где  — проекция начальной скорости на ось Ox,
— проекция начальной скорости на ось Ox,  — проекция скорости тела на ось Ox в момент времени t.
— проекция скорости тела на ось Ox в момент времени t.
Знаки проекций зависят от направления векторов и оси Ox.


3.1.3. График проекции ускорения от времени.
При равнопеременном движении ускорение постоянно, поэтому будет представлять собой прямые линии, параллельные оси времени (см. рис.):
Значение ускорения: чем дальше от оси времени лежит прямая, тем больше модуль ускорения 
3.1.4. Скорость при равнопеременном движении.
В векторном виде:

В проекции на ось Ox:

Для равноускоренного движения:

Для равнозамедленного движения:

3.1.5. График проекции скорости в зависимости от времени.
График проекции скорости от времени — прямая линия.
Направление движения: если график (или часть его) находятся над осью времени, то тело движется в положительном направлении оси Ox.
Значение ускорения: чем больше тангенс угла наклона (чем круче поднимается вверх или опускает вниз), тем больше модуль ускорения;  где
где  — изменение скорости за время
— изменение скорости за время 
Пересечение с осью времени: если график пересекает ось времени, то до точки пересечения тело тормозило (равнозамедленное движение), а после точки пересечения начало разгоняться в противоположную сторону (равноускоренное движение).
3.1.6. Геометрический смысл площади под графиком в осях 
Площадь под графиком, когда на оси Oy отложена скорость, а на оси Ox — время — это путь, пройденный телом.
На рис. 3.5 нарисован случай равноускоренного движения. Путь в данном случае будет равен площади трапеции:
 (3.9)
(3.9)
3.1.7. Формулы для расчета пути
| Равноускоренное движение
|
Равнозамедленное движение
|
|---|---|
 (3.10) (3.10) |
 (3.12) (3.12) |
 (3.11) (3.11) |
 (3.13) (3.13) |
 (3.14) (3.14) |


Все формулы, представленные в таблице, работают только при сохранении направления движения, то есть до пересечения прямой с осью времени на графике зависимости проекции скорости от времени.
Если же пересечение произошло, то движение проще разбить на два этапа:
до пересечения (торможение):


После пересечения (разгон, движение в обратную сторону)




В формулах выше — время от начала движения до пересечения с осью времени (время до остановки),  — путь, который прошло тело от начала движения до пересечения с осью времени,
— путь, который прошло тело от начала движения до пересечения с осью времени,  — время, прошедшее с момента пересечения оси времени до данного момента t,
— время, прошедшее с момента пересечения оси времени до данного момента t,  — путь, который прошло тело в обратном направлении за время, прошедшее с момента пересечения оси времени до данного момента t,
— путь, который прошло тело в обратном направлении за время, прошедшее с момента пересечения оси времени до данного момента t,  — модуль вектора перемещения за все время движения, L — путь, пройденный телом за все время движения.
— модуль вектора перемещения за все время движения, L — путь, пройденный телом за все время движения.
3.1.8. Перемещение за -ую секунду.
За время  тело пройдет путь:
тело пройдет путь:

За время  тело пройдет путь:
тело пройдет путь:

Тогда за -ый промежуток  тело пройдет путь:
тело пройдет путь:

За промежуток  можно принимать любой отрезок времени. Чаще всего
можно принимать любой отрезок времени. Чаще всего  с.
с.
Если  то
то

Тогда за 1-ую секунду тело проходит путь:

За 2-ую секунду:

За 3-ю секунду:

и т. д.
Если внимательно посмотрим, то увидим, что  и т. д.
и т. д.
Таким образом, приходим к формуле:

Словами: пути, проходимые телом за последовательные промежутки времени соотносятся между собой как ряд нечетных чисел, и это не зависит от того, с каким ускорением движется тело. Подчеркнем, что это соотношение справедливо при 
3.1.9. Уравнение координаты тела при равнопеременном движении
Уравнение координаты

Знаки проекций начальной скорости и ускорения зависят от взаимного расположения соответствующих векторов и оси Ox.
Для решения задач к уравнению  необходимо добавлять уравнение изменения проекции скорости на ось:
необходимо добавлять уравнение изменения проекции скорости на ось:
3.2. Графики кинематических величин при прямолинейном движении
3.3. Свободное падение тела
Под свободным падением подразумевается следующая физическая модель:
1) Падение происходит под действием силы тяжести:
2) Сопротивление воздуха отсутствует (в задачах иногда пишут «сопротивлением воздуха пренебречь»);
3) Все тела, независимо от массы падают с одинаковым ускорением (иногда добавляют — «независимо от формы тела», но мы рассматриваем движение только материальной точки, поэтому форма тела уже не учитывается);
4) Ускорение свободного падения направлено строго вниз и на поверхности Земли равно  (в задачах часто принимаем
(в задачах часто принимаем  для удобства подсчетов);
для удобства подсчетов);
3.3.1. Уравнения движения в проекции на ось Oy
В отличии от движения по горизонтальной прямой, когда далеко не всех задач происходит смена направления движения, при свободном падении лучше всего сразу пользоваться уравнениями, записанными в проекциях на ось Oy.
Уравнение координаты тела:

Уравнение проекции скорости:

Как правило, в задачах удобно выбрать ось Oy следующим образом:
Ось Oy направлена вертикально вверх;
Начало координат совпадает с уровнем Земли или самой нижней точкой траектории.
При таком выборе уравнения  и
и  перепишутся в следующем виде:
перепишутся в следующем виде:


3.4. Движение в плоскости Oxy.
Мы рассмотрели движение тела с ускорением вдоль прямой. Однако этим равнопеременное движение не ограничивается. Например, тело, брошенное под углом к горизонту. В таких задачах необходимо учитывать движение сразу по двум осям:

Или в векторном виде:

И изменение проекции скорости на обе оси:

3.5. Применение понятия производной и интеграла
Мы не будем приводить здесь подробное определение производной и интеграла. Для решения задач нам понадобятся лишь небольшой набор формул.
Производная:



где A, B и  то есть постоянные величины.
то есть постоянные величины.
Интеграл:



Теперь посмотрим, как понятие производной и интеграла применимо к физическим величинам. В математике производная обозначается «’», в физике производная по времени обозначается «∙» над функцией.
Скорость:

то есть скорость является производной от радиус-вектора.
Для проекции скорости:

Ускорение:

то есть ускорение является производной от скорости.
Для проекции ускорения:

Таким образом, если известен закон движения  то легко можем найти и скорость и ускорение тела.
то легко можем найти и скорость и ускорение тела.
Теперь воспользуемся понятием интеграла.
Скорость:

то есть, скорость можно найти как интеграл по времени от ускорения.

Радиус-вектор:

то есть, радиус-вектор можно найти, взяв интеграл от функции скорости.

Таким образом, если известна функция  то легко можем найти и скорость, и закон движения тела.
то легко можем найти и скорость, и закон движения тела.
Константы в формулах определяются из начальных условий — значения 
 и
и 
 в момент времени
в момент времени 
3.6. Треугольник скоростей и треугольник перемещений
3.6.1. Треугольник скоростей
В векторном виде при постоянном ускорении закон изменения скорости имеет вид (3.5):

Эта формула означает, что вектор равен векторной сумме векторов  и
и  Векторную сумму всегда можно изобразить на рисунке (см. рис.).
Векторную сумму всегда можно изобразить на рисунке (см. рис.).
В каждой задаче, в зависимости от условий, треугольник скоростей будет иметь свой вид. Такое представление позволяет использовать при решении геометрические соображения, что часто упрощает решение задачи.
3.6.2. Треугольник перемещений
В векторном виде закон движения при постоянном ускорении имеет вид:
При решении задачи можно выбирать систему отсчета наиболее удобным образом, поэтому не теряя общности, можем выбрать систему отсчета так, что  то есть начало системы координат помещаем в точку, где в начальный момент находится тело. Тогда
то есть начало системы координат помещаем в точку, где в начальный момент находится тело. Тогда

то есть вектор  равен векторной сумме векторов
равен векторной сумме векторов  и
и  Изобразим на рисунке (см. рис.).
Изобразим на рисунке (см. рис.).
Как и в предыдущем случае в зависимости от условий треугольник перемещений будет иметь свой вид. Такое представление позволяет использовать при решении геометрические соображения, что часто упрощает решение задачи.
Как найти ускорение — определение и формулы расчета в физике
Содержание:
-
Что такое ускорение
- Единица измерения
-
Как рассчитать ускорение: формулы
- Для прямолинейного движения
- Для равноускоренного движения
- Для равнозамедленного движения
- Нахождение ускорения через массу и силу
- Мгновенное ускорение
- Максимальное ускорение
- Среднее ускорение
- Проекция ускорения
Что такое ускорение
Ускорение (overrightarrow а) — векторная величина в физике, характеризующая быстроту изменения скорости тела.
Ускорение является векторной величиной, показывающей, на сколько изменяется вектор скорости тела при его движении за единицу времени.
Единица измерения
В СИ (системе интернациональной) ускорение измеряется: ( begin{bmatrix}aend{bmatrix}=frac м{с^2})
Осторожно! Если преподаватель обнаружит плагиат в работе, не избежать крупных проблем (вплоть до отчисления). Если нет возможности написать самому, закажите тут.
Как рассчитать ускорение: формулы
Для прямолинейного движения
Прямолинейное движение — механическое движение, при котором траектория тела — прямая линия.
В этом случае ускорение находится по следующим формулам:
(a;=;frac{mathrm V}t)
(a;=;frac{2S}{t^2})
(a;=;frac{V^2}{2S})
Где (a) — достигнутое ускорение тела, (S) — пройденный путь (расстояние), (t) — затраченное время.
Время отсчитывается от начала движения тела.
При прямолинейном равномерном движении ускорение по модулю равняется нулю.
Для равноускоренного движения
Равноускоренное движение — прямолинейное движение с постоянным положительным ускорением (разгон).
При таком виде движения ускорение определяется по формуле: (a;=;frac{V-V_0}t), где (V_0) и (V) начальная и конечная скорости соответственно, (a) — достигнутое ускорение тела, (t) — затраченное время.
Для равнозамедленного движения
Равнозамедленное движение — прямолинейное движение с постоянным отрицательным ускорением (замедление).
При таком виде движения ускорение находим по формуле: (a;=-;frac{V-V_0}t), где V0 и V начальная и конечная скорости соответственно, a — достигнутое ускорение тела, t — затраченное время.
Нахождение ускорения через массу и силу
Принцип инерции Галилея:
Если не действовать на тело, то его скорость не будет меняться.
Система отсчета (СО) — система координат, точка отсчета и указание начала отсчета времени.
Инерциальная система отсчета (ИСО) — это СО, в которой наблюдается движение по инерции (соблюдается принцип инерции).
II закон Ньютона:
В инерциальных системах отсчёта ускорение, приобретаемое материальной точкой, прямо пропорционально вызывающей его силе, совпадает с ней по направлению и обратно пропорционально массе материальной точки.
или
(overrightarrow a=frac{overrightarrow F}m)
Мгновенное ускорение
Мгновенное ускорение тела (материальной точки) в данный момент времени — это физическая величина, равная пределу, к которому стремится среднее ускорение при стремлении промежутка времени к нулю. Другими словами — это ускорение, которое развивает тело за максимально короткий отрезок времени.
Выражается по формуле:
( overrightarrow a=lim_{trightarrow0}frac{triangleoverrightarrow V}{triangle t})
Максимальное ускорение
(a_{max}=omega v_{max},) где (a_{max}) — максимальное ускорение, (omega) — круговая (угловая, циклическая) частота, (v_{max}) — максимальная скорость.
Среднее ускорение
Среднее ускорение — это отношение изменения скорости к промежутку времени, за который это изменение произошло.
(overrightarrow{a_{ср}}=frac{triangleoverrightarrow V}{triangle t}), где (overrightarrow{a_{ср}}) — среднее ускорение, (triangleoverrightarrow V) — изменение скорости, ( triangle t) — изменение времени.
Проекция ускорения
Определение проекции ускорения на ось (х):
(a_x=frac{V_x-V_{0x}}t), где где (a_x) — проекция ускорения на ось (х), (V_x) — проекция текущей скорости на ось (х), (V_{0x}) — проекция начальной скорости на ось (х), (t) или (triangle t) — промежуток времени, за который произошло изменение проекции скорости.
Насколько полезной была для вас статья?
Рейтинг: 1.94 (Голосов: 35)
Выделите текст и нажмите одновременно клавиши «Ctrl» и «Enter»
Текст с ошибкой:
Расскажите, что не так
Поиск по содержимому
- Равноускоренное прямолинейное движение — движение по прямой линии с постоянным ускорением (a=const).
- Ускорение — векторная физическая величина, показывающая изменение скорости тела за 1 с. Обозначается как a.
- Единица измерения ускорения — метр в секунду в квадрате (м/с2).
- Акселерометр — прибор для измерения ускорения.
Формула ускорения
Ускорение тела равно отношению изменения вектора скорости ко времени, в течение которого это изменение произошло:
v — скорость тела в данный момент времени, v0 — скорость тела в начальный момент времени, t — время, в течение которого изменялась скорость
Пример №1. Состав тронулся с места и через 20 секунд достиг скорости 36 км/ч. Найти ускорение его разгона.
Сначала согласуем единицы измерения. Для этого переведем скорость в м/с: умножим километры на 1000 и поделим на 3600 (столько секунд содержится в 1 часе). Получим 10 м/с.
Начальная скорость состава равно 0 м/с, так как изначально он стоял на месте. Имея все данные, можем подставить их в формулу и найти ускорение:
Проекция ускорения
Проекция ускорения на ось ОХ
vx — проекция скорости тела в данный момент времени, v0x — проекция скорости в начальный момент времени, t — время, в течение которого изменялась скорость
Знак проекции ускорения зависит от того, в какую сторону направлен вектор ускорения относительно оси ОХ:
- Если вектор ускорения направлен в сторону оси ОХ, то его проекция положительна.
- Если вектор ускорения направлен в сторону, противоположную направлению оси ОХ, его проекция отрицательная.
При решении задач на тему равноускоренного прямолинейного движения проекции величин можно записывать без нижнего индекса, так как при движении по прямой тело изменяет положение относительно только одной оси (ОХ). Их обязательно нужно записывать, когда движение описывается относительно двух и более осей.
Направление вектора ускорения
Направление вектора ускорения не всегда совпадает с направлением вектора скорости!
Равноускоренным движением называют такое движение, при котором скорость за одинаковые промежутки времени изменяется на одну и ту же величину. При этом направления векторов скорости и ускорения тела совпадают (а↑↑v).
Равнозамедленное движение — частный случай равноускоренного движения, при котором скорость за одинаковые промежутки времени уменьшается на одну и ту же величину. При этом направления векторов скорости и ускорения тела противоположны друг другу (а↑↓v).
Пример №2. Автомобиль сначала разогнался, а затем затормозил. Во время разгона направления векторов его скорости и ускорения совпадают, так как скорость увеличивается. Но при торможении скорость уменьшается, потому что вектор ускорения изменил свое направление в противоположную сторону.

График ускорения
График ускорения — график зависимости проекции ускорения от времени. Проекция ускорения при равноускоренном прямолинейном движении не изменяется (ax=const). Графиком ускорения при равноускоренном прямолинейном движении является прямая линия, параллельная оси времени.
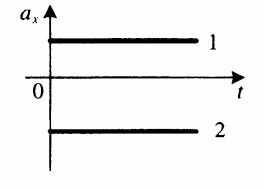
Зависимость положения графика проекции ускорения относительно оси ОХ от направления вектора ускорения:
- Если график лежит выше оси времени, движение равноускоренное (направление вектора ускорения совпадает с направлением оси ОХ). На рисунке выше тело 1 движется равноускорено.
- Если график лежит ниже оси времени, движение равнозамедленное (вектор ускорения направлен противоположно оси ОХ). На рисунке выше тело 2 движется равнозамедлено.
Если график ускорения лежит на оси времени, движение равномерное, так как ускорение равно 0. Скорость в этом случае — величина постоянная.
Чтобы сравнить модули ускорений по графикам, нужно сравнить степень их удаленности от оси времени независимо от того, лежат они выше или ниже нее. Чем дальше от оси находится график, тем больше его модуль. На рисунке график 2 находится дальше от оси времени по сравнению с графиком один. Поэтому модуль ускорения тела 2 больше модуля ускорения тела 1.
Пример №3. По графику проекции ускорения найти участок, на котором тело двигалось равноускорено. Определить ускорение в момент времени t1 = 1 и t2 = 3 с.
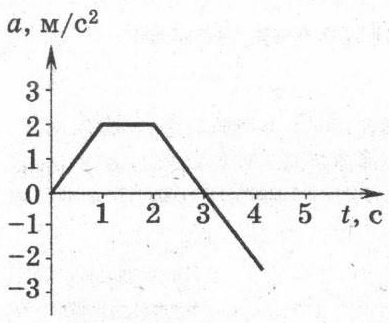
В промежуток времени от 0 до 1 секунды график ускорения рос, с 1 до 2 секунд — не менялся, а с 2 до 4 секунд — опускался. Так как при равноускоренном движении ускорение должно оставаться постоянным, ему соответствует второй участок (с 1 по 2 секунду).
Чтобы найти ускорение в момент времени t, нужно мысленно провести перпендикулярную прямую через точку, соответствующую времени t. От точки пересечения с графиком нужно мысленно провести перпендикуляр к оси проекции ускорения. Значение точки, в которой пересечется перпендикуляр с этой осью, покажет ускорение в момент времени t.
В момент времени t1 = 1с ускорение a = 2 м/с2. В момент времени t2 = 3 ускорение a = 0 м/с2.
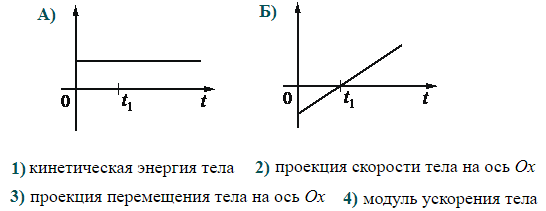
Задание EF18774
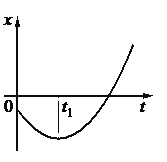
На рисунке показан график зависимости координаты x тела, движущегося вдоль оси Ох, от времени t (парабола). Графики А и Б представляют собой зависимости физических величин, характеризующих движение этого тела, от времени t. Установите соответствие между графиками и физическими величинами, зависимости которых от времени эти графики могут представлять.
К каждой позиции графика подберите соответствующую позицию утверждения и запишите в поле цифры в порядке АБ.
Алгоритм решения
- Определить, какому типу движения соответствует график зависимости координаты тела от времени.
- Определить величины, которые характеризуют такое движение.
- Определить характер изменения величин, характеризующих это движение.
- Установить соответствие между графиками А и Б и величинами, характеризующими движение.
Решение
График зависимости координаты тела от времени имеет вид параболы в случае, когда это тело движется равноускоренно. Так как движение тела описывается относительно оси Ох, траекторией является прямая. Равноускоренное прямолинейное движение характеризуется следующими величинами:
- перемещение и путь;
- скорость;
- ускорение.
Перемещение и путь при равноускоренном прямолинейном движении изменяются так же, как координата тела. Поэтому графики их зависимости от времени тоже имеют вид параболы.
График зависимости скорости от времени при равноускоренном прямолинейном движении имеет вид прямой, которая не может быть параллельной оси времени.
График зависимости ускорения от времени при таком движении имеет вид прямой, перпендикулярной оси ускорения и параллельной оси времени, так как ускорение в этом случае — величина постоянная.
Исходя из этого, ответ «3» можно исключить. Остается проверить ответ «1». Кинетическая энергия равна половине произведения массы тела на квадрат его скорости. Графиком квадратичной функции является парабола. Поэтому ответ «1» тоже не подходит.
График А — прямая линия, параллельная оси времени. Мы установили, что такому графику может соответствовать график зависимости ускорения от времени (или его модуля). Поэтому первая цифра ответа — «4».
График Б — прямая линия, не параллельная оси времени. Мы установили, что такому графику может соответствовать график зависимости скорости от времени (или ее проекции). Поэтому вторая цифра ответа — «2».
Ответ: 24
pазбирался: Алиса Никитина | обсудить разбор
Задание EF17992
Начальная скорость автомобиля, движущегося прямолинейно и равноускоренно, равна 5 м/с. После прохождения расстояния 40 м его скорость оказалась равной 15 м/c. Чему равно ускорение автомобиля?
Алгоритм решения
- Записать исходные данные.
- Записать формулу, связывающую известные из условия задачи величины.
- Выразить из формулы искомую величину.
- Вычислить искомую величину, подставив в формулу исходные данные.
Решение
Запишем исходные данные:
- Начальная скорость v0 = 5 м/с.
- Конечная скорость v = 15 м/с.
- Пройденный путь s = 40 м.
Формула, которая связывает ускорение тела с пройденным путем:
Так как скорость растет, ускорение положительное, поэтому перед ним в формуле поставим знак «+».
Выразим из формулы ускорение:
Подставим известные данные и вычислим ускорение автомобиля:
Ответ: 2,5
pазбирался: Алиса Никитина | обсудить разбор
Задание EF18202
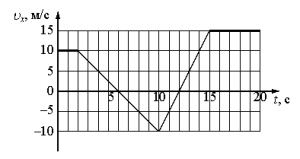
Внимательно прочитайте текст задания и выберите верный ответ из списка. На рисунке приведён график зависимости проекции скорости тела vx от времени.
Какой из указанных ниже графиков совпадает с графиком зависимости от времени проекции ускорения этого тела ax в интервале времени от 6 с до 10 с?

Алгоритм решения
- Охарактеризовать движение тела на участке графика, обозначенном в условии задачи.
- Вычислить ускорение движение тела на этом участке.
- Выбрать график, который соответствует графику зависимости от времени проекции ускорения тела.
Решение
Согласно графику проекции скорости в интервале времени от 6 с до 10 с тело двигалось равнозамедленно. Это значит, что проекция ускорения на ось ОХ отрицательная. Поэтому ее график должен лежать ниже оси времени, и варианты «а» и «в» заведомо неверны.
Чтобы выбрать между вариантами «б» и «г», нужно вычислить ускорение тела. Для этого возьмем координаты начальной и конечной точек рассматриваемого участка:
- t1 = 6 с. Этой точке соответствует скорость v1 = 0 м/с.
- t2 = 10 с. Этой точке соответствует скорость v2 = –10 м/с.
Используем для вычислений следующую формулу:
Подставим в нее известные данные и сделаем вычисления:
Этому значению соответствует график «г».
Ответ: г
pазбирался: Алиса Никитина | обсудить разбор
Задание EF18027
На графике приведена зависимость проекции скорости тела от времени при прямолинейном движении по оси х. Определите модуль ускорения тела.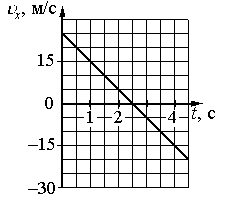
Алгоритм решения
- Записать формулу ускорения.
- Записать формулу для вычисления модуля ускорения.
- Выбрать любые 2 точки графика.
- Определить для этих точек значения времени и проекции скорости (получить исходные данные).
- Подставить данные формулу и вычислить ускорение.
Решение
Записываем формулу ускорения:
По условию задачи нужно найти модуль ускорения, поэтому формула примет следующий вид:
Выбираем любые 2 точки графика. Пусть это будут:
- t1 = 1 с. Этой точке соответствует скорость v1 = 15 м/с.
- t2 = 2 с. Этой точке соответствует скорость v2 = 5 м/с.
Подставляем данные формулу и вычисляем модуль ускорения:
Ответ: 10
pазбирался: Алиса Никитина | обсудить разбор
Алиса Никитина | Просмотров: 13.7k
Проекции скорости и ускорения
Для выполнения
расчетов скоростей и ускорений необходимо
переходить от записи уравнений в
векторной форме к записи уравнений в
алгебраической форме.
Векторы начальной
скорости
![]() и ускорения
и ускорения![]() могут иметь различные направления,
могут иметь различные направления,
поэтому переход от векторной записи
уравнений к алгебраической может
оказаться весьма трудоемким.
Известно, что
проекция суммы двух векторов на какую-либо
координатную ось равна сумме проекций
слагаемых векторов на ту же ось.
|
|
Поэтому для Проекцию |
|
|
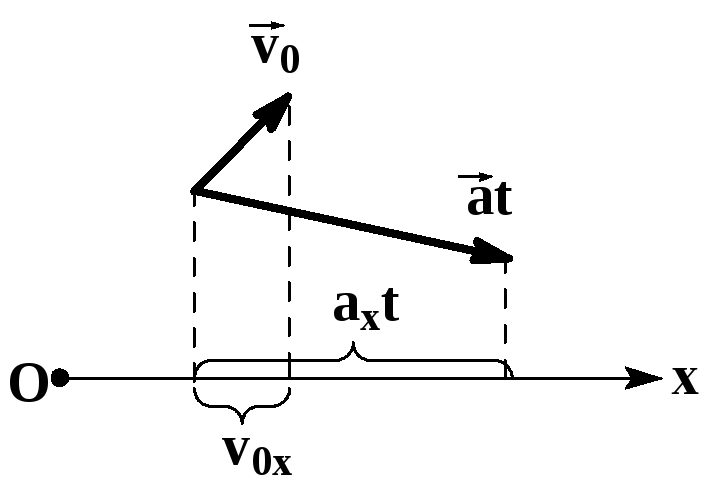
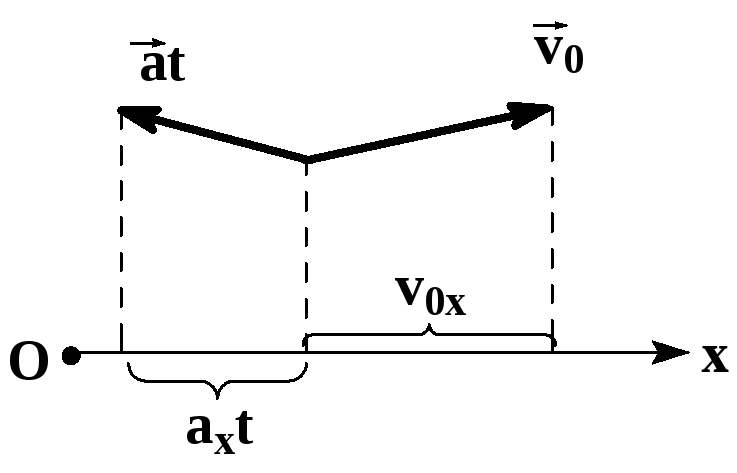
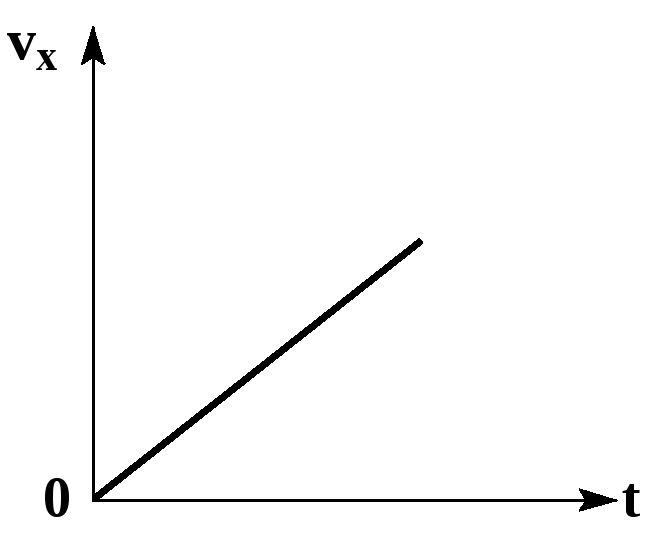
График скорости
Из уравнения
![]() следует, что графиком зависимости
следует, что графиком зависимости
проекции скорости равноускоренного
движения от времени является прямая.
Если проекция начальной скорости на
ось OX равна нулю, то прямая проходит
через начало координат.
|
|
|
Основные
виды движения
-
аn
= 0, a
= 0 –
прямолинейное равномерное движение; -
аn
= 0, a
= const
– прямолинейное равнопеременное
движение; -
аn
= 0, a
0 – прямолинейное
с переменным ускорением; -
аn
= const,
a
= 0 – равномерное
по окружности -
аn
= const,
a
= const
– равнопеременное по окружности -
аn
const,
a
const
– криволинейное с переменным ускорением.
Вращательное движение твердого тела.
Вращательное
движение твердого тела относительно
неподвижной оси
– движение, при котором все точки
твердого тела описывают окружности,
центры которых лежат на одной прямой,
называемой осью
вращения.
Равномерное движение по окружности
Рассмотрим наиболее
простой вид вращательного движения, и
уделим особое внимание центростремительному
ускорению.
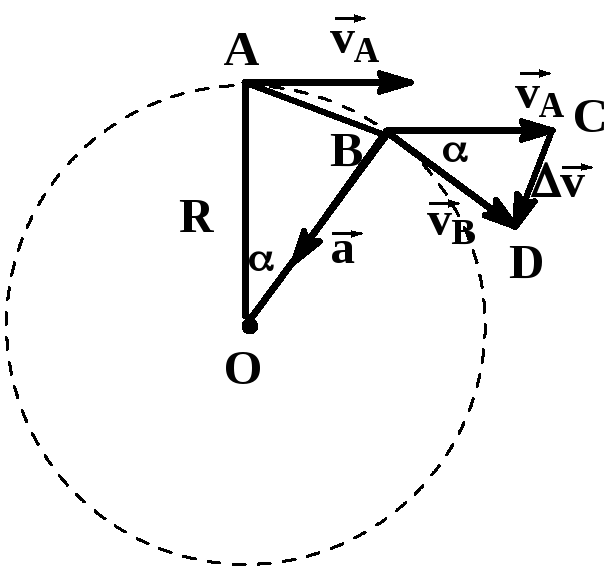
При равномерном
движении по окружности значение скорости
остается постоянным, а направление
вектора скорости
![]() изменяется в процессе движения.
изменяется в процессе движения.
|
|
За |
![]()
Из подобия
треугольников OAB и BCD следует
![]()
Если интервал
времени ∆t
мал, то мал и угол .
При малых значениях угла
длина хорды AB примерно равна длине дуги
AB, т.е.
![]() .
.
Т.к.![]() ,
,![]() ,
,
то получаем
![]()
![]() .
.
Поскольку
![]() ,
,
то получаем
![]()
Период и частота
Промежуток времени,
за который тело совершает полный оборот
при движении по окружности, называется
периодам
обращения
(Т).
Т.к. длина окружности равна 2R,
период обращения при равномерном
движении тела со скоростью v
по окружности радиусом R
равняется:
![]()
Величина, обратная
периоду обращения, называется частотой.
Частота показывает, сколько оборотов
по окружности совершает тело в единицу
времени:
![]() (с-1)
(с-1)
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
01.06.2015304.13 Кб31KP.doc
- #
- #
- #
- #
- #
- #
- #
- #
Рассмотрим движение тела из точки (A) в точку (B) (рис. (1)). Траектория (AB) является криволинейной.
Введём понятие «средняя скорость».
На рисунке (1) показаны вектора перемещений тела (Delta{vec{r_3}}), (Delta{vec{r_2}}) и (Delta{vec{r_1}}) за различные сокращающиеся промежутки времени (Delta{t_3}), (Delta{t_2}) и (Delta{t_1}).

Рис. (1). Перемещения тела при криволинейном движении
Средняя скорость равна отношению перемещения за конечный промежуток времени:
Средняя скорость является векторной величиной:
- направление средней скорости υ ср→↑↑Δr→ находится согласно математической формуле определения данной физической величины (сравни математическое выражение (vec{a}) (=) (frac{vec{b}}{2}) и формулу средней скорости);
- числовое значение средней скорости (модуль, проекции на координатные оси) определяется согласно геометрическим правилам работы с векторами;
- физические понятия отличаются от математических понятий наличием единиц измерения ([(v_{ср})] (=) [(frac{м}{с})]).
Участки траектории (AB), (AD) и (AE) (рис. (1)) характеризуются, соответственно, средними скоростями:
(vec{v_{ср3}}), (vec{v_{ср2}}), (vec{v_{ср1}}).
| (vec{v_{ср3}}) = (frac{Delta{vec{r_3}}}{Delta{t_3}}) | (vec{v_{ср2}}) = (frac{Delta{vec{r_2}}}{Delta{t_2}}) | (vec{v_{ср1}}) = (frac{Delta{vec{r_1}}}{Delta{t_1}}) |
Если уменьшать неограниченно промежуток времени (Delta{t}), то быстрота движения тела характеризуется понятием «мгновенная скорость» (или «скорость»).
Математическая запись уменьшения промежутка времени:
Δt→0
(в математике существует понятие «предел», символ данного понятия — «lim»).
Физический смысл принципа уменьшения промежутка времени: на определённом этапе данной процедуры значения средней скорости будут приблизительно одинаковыми и определение физического понятия «средняя скорость» изменится на физическое понятие «мгновенная скорость»
.
Мгновенная скорость является векторной величиной:
- вектор мгновенной скорости (далее — скорости) направлен по касательной к траектории в исследуемой точке (проверь, как на рисунке (1) «хорды — перемещения (Delta{vec{r_3}}), (Delta{vec{r_2}}) и (Delta{vec{r_1}})» при уменьшении промежутков времени (Delta{t_3}), (Delta{t_2}) и (Delta{t_1}) изображаются касательными, которые соответствуют векторам скоростей (vec{v_3}), (vec{v_2}), (vec{v_1})).
На рисунке (1) тело движется из точки (E) в точку (D), изменяя скорость от (v_2) до (v_3). Параллельным переносом перенесём вектор (vec{v_{3}}) к (vec{v_{2}}), тогда изменение скорости за промежуток времени (Delta{t}) равно разности векторов
((vec{v_{3}})(-)(vec{v_{2}})), что на рисунке (1) соответствует вектору ускорения (vec{a_{2}}).
Среднее ускорение равно отношению изменения скорости к промежутку времени:
Примечание:
1) в физических задачах при написании символа aср → индекс «ср», как правило, не прописывается;
2) в ситуации прямолинейного неравномерного движения используется термин «ускорение».
Характеристики физического понятия «среднее ускорение»:
- направление вектора среднего ускорения определяется согласно правилу aср→↑↑Δυ→;
- числовое значение ускорения (модуль, проекции на координатные оси) определяется согласно геометрическим правилам работы с векторами;
- единица измерения ([(a_{ср})] (=) [(frac{м}{с^2})]).
Участки траектории (AB), (AD) и (AE) (рис. (1)) характеризуются, соответственно, средними ускорениями (vec{a_{3}}), (vec{a_{2}}), (vec{a_{1}}).
| (vec{a_{3}}) (=) (frac{Delta{vec{v_3}}}{Delta{t_3}}) | (vec{a_{2}}) (=) (frac{Delta{vec{v_2}}}{Delta{t_2}}) | (vec{a_{1}}) (=) (frac{Delta{vec{v_1}}}{Delta{t_1}}) |
Если уменьшать неограниченно промежуток времени (Delta{t}), то изменение скорости движения тела в конкретный момент времени характеризуется физическим понятием «мгновенное ускорение».
Вектор мгновенного ускорения при движении тела по криволинейной траектории представляет векторную сумму компонентов данного вектора, которые направлены по касательной и нормали (перпендикуляр к касательной).
Векторное и скалярное уравнения скорости материальной точки
1) Общий вид:
- векторное уравнение — (vec{v}) (=) (vec{v}(t));
- числовые (скалярные) уравнения — (v_x) (=) (v_x(t)), (v_y) (=) (v_y(t)), (v_z) (=) (v_z(t)).
2) Прямолинейное равноускоренное движение:
- векторное уравнение — (vec{v}(t)) (=) (vec{v}{_0}) (+) (vec{a}(t – t_0)),
где (vec{v}{_0}) — скорость тела в начальный момент времени ({t_0}), (vec{v}(t)) — скорость тела в произвольный момент
времени (t);
- числовые (скалярные) уравнения — (v_x(t)) (=) (v_{0x}) (+) (a_x(t – t_0)), (v_y(t)) (=) (v_{0y}) (+) (a_y(t – t_0)),
(v_z(t)) (=) (v_{0z}) (+) (a_z(t – t_0)).
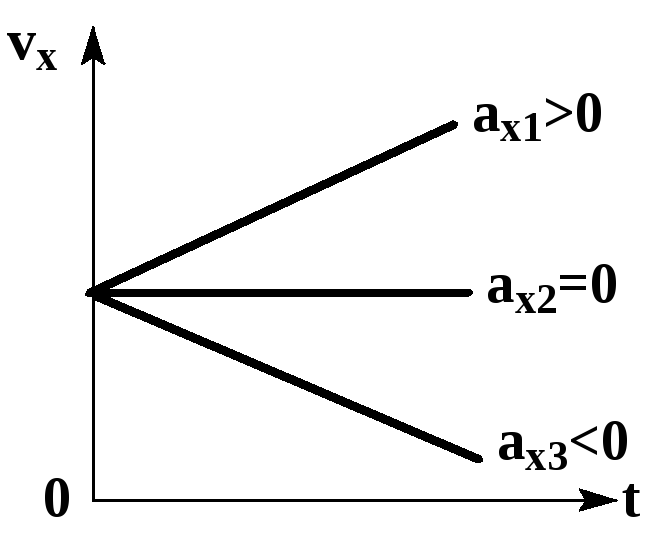
Графическое изображение зависимости проекции скорости от времени ({v_х}(t))
При движении тела с постоянным ускорением проекция скорости изменяется по линейному закону в зависимости от времени (t): (v_x(t)) (=) (v_{0x}) (+) (a_x(t – t_0)) (рис. (2)).
|
|
|

Рис. (2). График зависимости проекции скорости от времени
Значение проекции ускорения по графику определяется как тангенс угла: (a_x) (=) (tgα) (=) (frac{Delta{v}}{Delta{t}}).
Перемещение
Проекции перемещений при равнопеременном движении в момент времени (t) определяются формулами:
(s_x(t)=x(t) – x_0), (s_y(t)=y(t) -y_0), (s_z(t)=z(t) – z_0).
|
(A) |
(B) |


Рис. (3). Определение модуля и проекций перемещения по графику зависимости проекции скорости от времени
Модуль и проекции перемещения тела определяются графическим способом с
использованием графика зависимости (v_x(t)).
|
Рисунок (3) (A) ((v_0) (=) (0)) |
Рисунок (3) (B) ((v_0) (≠) (0)) |
|
Модуль перемещения определяется как площадь прямоугольного треугольника (ABC) с катетами (c) и (b), где (b) (=) (t), (c) (=) (at). |
Модуль перемещения определяется как площадь трапеции (ABCD) с основаниями (d) (=) (v_0), (b) (=) (v_0+at) и высотой (h) (=) (t). S=12b+dh⇒S=υ0⋅t+a⋅t22 |
|
Проекция перемещения: (s_x) (=) (S) |
Проекция перемещения: (s_x) (=) (S) |
Примечание: если график проекции скорости состоит из участков, где площадь трапеции имеет отрицательное значение (например, (s_{x1}) (>) (0), (s_{x2}) (<) (0)), то модуль перемещения тела равен:
s=sx1+sx2
.
Источники:
Рис. 1. Перемещения тела при криволинейном движении. © ЯКласс.
Рис. 2. График зависимости проекции скорости от времени. © ЯКласс.
Рис. 3. Определение модуля и проекций перемещения по графику зависимости проекции скорости от времени. © ЯКласс.
