
Разложение ускорения 



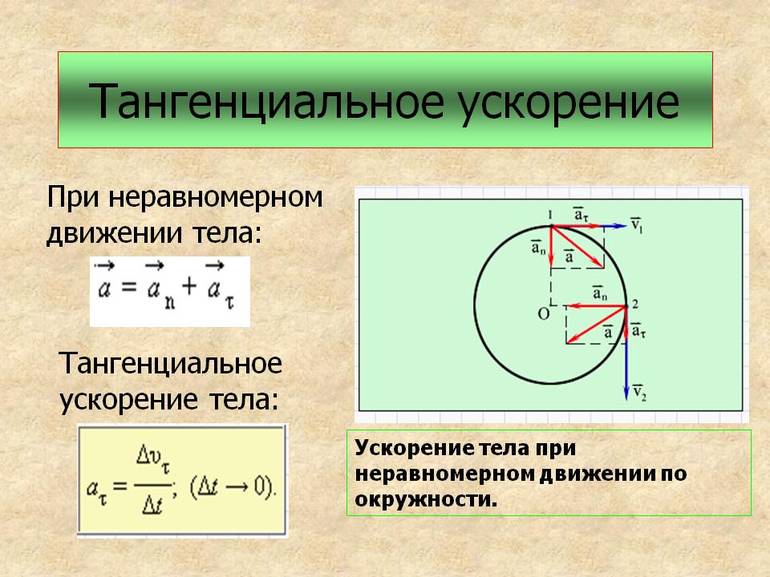
Тангенциа́льное ускоре́ние — компонента ускорения, направленная по касательной к траектории движения. Характеризует изменение модуля скорости, в отличие от нормальной компоненты, характеризующей изменение направления скорости.
Определяется как производная модуля скорости по времени, умноженная на единичный вектор 



Величина 

Общая формула[править | править код]
Величину тангенциального ускорения как проекцию вектора ускорения на касательную к траектории можно выразить так:
,
где 
Если использовать для единичного касательного вектора обозначение
.
Тангенциальное ускорение 
Происхождение формулы[править | править код]
Разложение полного ускорения на тангенциальную и нормальную компоненты осуществляется посредством дифференцирования по времени вектора скорости, представленного в виде 
.
Первое слагаемое — тангенциальное ускорение 



Некоторые примеры[править | править код]
- Пример 1
Скорость камня, сброшенного с высоты с начальной скоростью 





.
В этих выражениях 

- Пример 2
Пусть радиус-вектор тела зависит от времени по закону 
В таком случае скорость тела найдётся как 

.
Рассмотренная зависимость 

Равнопеременность[править | править код]
Движение тела с постоянным по величине тангенциальным ускорением называется равнопеременным. Слова «равнопеременное» (

Общие сведения
Первая лекция для студентов, изучающих кинематику, начинается с рассмотрения тангенциального ускорения, характеризуемого произвольным движением. По сути, рассматривается неравномерное прямолинейное движение общего вида. Кинематика входит в механику и изучает перемещение объектов без учёта сил, вызвавших их движение. Под перемещением понимают изменение положения в пространстве по отношению к другому физическому телу, которое и считается точкой отсчёта. Если изменение положения связать с координатами и временем, то образуется система отсчёта. С её помощью можно определить положение объекта в любой момент.
В кинематике любые процессы принято рассматривать, приняв тело за материальную точку. То есть его размерами и формой пренебрегают. При изменении за какой-то промежуток времени точка проходит путь, описывающийся линией — траекторией. Она является скалярной величиной, а само перемещение — векторной. Движение материальной точки может происходить с разной скоростью и ускорением. Быстроту движения разделяют на среднюю и мгновенную. Вторая определяется как предел, к которому стремится скорость на бесконечно малом временном интервале: v = Δs / Δt (Δt → 0).
Перемещение может происходить с ускорением. Это физическая величина, определяющая изменение быстроты перемещения. Иными словами, показывает изменение положения за единицу времени. Измеряется она в метрах на секунду в квадрате. В кинематике существует три вида ускорения:
- Тангенциальное — направленное вдоль касательного пути точки в определённый момент. Из-за происхождения слова его часто называют касательным.
- Нормальное — совпадающее с нормалью траектории изменения положения.
- Полное — определяющееся суммой тангенциального и нормального ускорений.
Но также используется понятие «вектор среднего ускорения тела». Определяется он как приращение вектора скорости за промежуток времени: aср = Δv / Δt. При этом он будет совпадать по направлению с вектором скорости, то есть направлен в сторону вогнутости траектории.
Угловое ускорение
Если имеется какая-то точка, находящаяся на вращающемся теле, то скорость её направлена по касательной. Когда движение равномерное, то линейная скорость связана с угловой равенством: v = w * r. А вот ускорение тела будет направлено по радиусу к центру окружности, причём модуль вычисляется как a = v / r либо если это точка на вращающемся теле: a = w2 * r.
В момент, когда тело поворачивается за небольшой промежуток времени на угол дельта фи, угловую скорость можно связать с условием поворота через формулу: w = Δ φ / Δ t. Если тело вращается равномерно, то промежуток времени может быть любым. В ином случае эта величина будет равна мгновенной угловой скорости.
Можно представить, что материальная точка движется неравномерно, то есть изменяется угловая скорость тела. Линейная скорость не будет представлять собой постоянную величину, в отличие от равномерного перемещения. Угол поворота равняется: w = v / r. Так как скорость не может быть константой, то отсюда следует, что и угловая скорость не будет постоянной величиной. Её изменение обозначают Δw. Она равняется разности конечной угловой скорости и начальной: Δw = wк — wн.
Изменение угловой скорости можно разделить на промежуток времени, за который оно поменяло значение: (wк — wн) / Δt. По сути, получается ускорение. Обозначается характеристика буквой эпсилон E и называется угловым ускорением. Измеряется характеристика в радианах на секунду в квадрате. Её смысл заключается в описании физической величины через отношение изменения угловой скорости тела за небольшой промежуток времени к длительности этого промежутка.
Пусть есть дуга окружности с центром. В начальный момент времени у тела есть скорость, направленная по касательной к траектории v0. Через некоторое время точка переместится по окружности на небольшое расстояние. Так как движение неравномерное, модуль скорости изменится v ≠ v0. Для того чтобы найти ускорение тела, нужно воспользоваться следующей формулой: a = Δv / Δt, при этом Δv = v — v0.
Чтобы найти эту разность, нужно воспользоваться правилом треугольника. Для этого следует перенести вектор V0 к V и соединить их линией. Радиус от центра к материальной точке можно обозначить R. Дельта V можно представить, как сумму взаимно перпендикулярных векторов. Один из них будет направленных тангенциально к радиусу, в физике обозначают его Δ Vτ, а другой радиально Δ Vr. В итоге: ΔV = Δ Vτ + Δ Vr.
Вывод формулы

Для доказательства формулы необходимо рассмотреть плоскую систему координат, в которой материальная точка изменяет своё положение по криволинейной траектории. В начальный момент её скорость будет равняться V0. Через некоторое время она изменится и станет V. На графике в плоском измерении это можно представить в виде синусоиды. В определённый момент времени скорость превышает начальную: V > V0. На схеме вектор нулевой скорости направлен из точки t0 вверх по касательной, а вектор V с нижней точки синусоиды параллельно оси ординаты.
Исходя из графика, можно сделать два вывода:
- Через промежуток времени Δt скорость изменяется как по направлению, так и по модулю: Δt = t — t0.
- Вектор изменения скорости, определяемый по правилу треугольника, будет равняться разности существующей скорости на данный момент и начальной: Δv = v — v0.
Для того чтобы построить вектор изменения Δv, нужно из конечной точки отрезка V0 провести линию к рассматриваемой точки, характеризующейся во времени скоростью V. Вершины полученного треугольника можно обозначить буквами ABD. Из верхнего угла B на сторону AD можно опустить медиану. Точка пересечения со стороной пусть будет C. Получается, что вектор Δv можно разложить на две составляющие — отрезки BC и СD. Причём медиана равняется Δvn, а изменение по оси ординаты Δvt.
Для разложения необходимо использовать вектор АС, длина которого совпадает с Vo по модулю: |AC| = |AB| = V0. Так как Δvn — результирующий вектор, то его можно вычислить через сумму: Δv = Δvn + Δvt. Причём первый член в равенстве характеризует изменение быстроты за промежуток времени по направлению, а второй — по модулю. Исходя из того, что t не равняется нулю, на него можно разделить левую и правую часть равенства: Δv / Δt = Δvn / Δt + Δvt / Δt. Если дельта-времени стремится к нулю, то формулу можно переписать в виде: lim Δv / Δt = lim Δvn / Δt + lim Δvt / Δt.
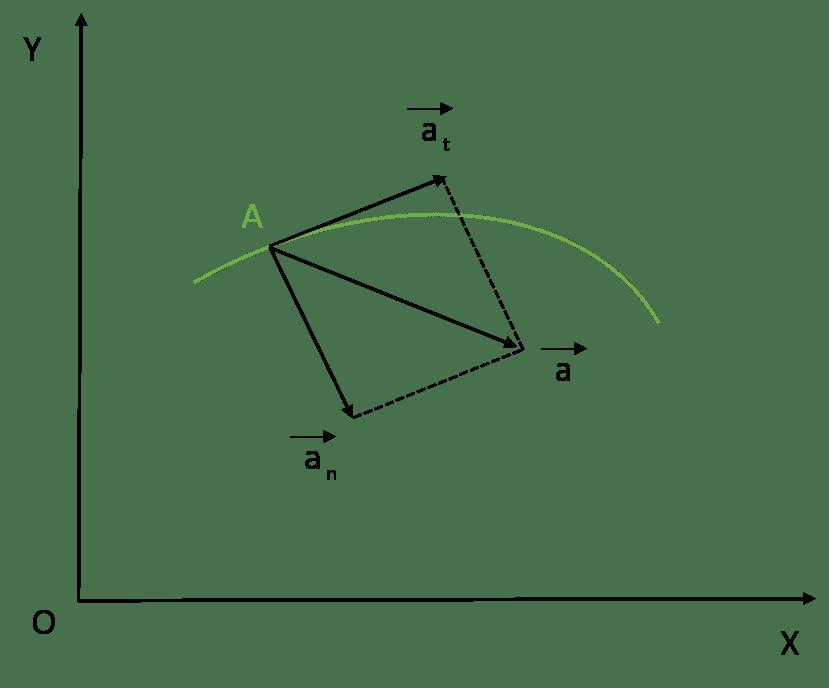
Учитывая связь между ускорениями и то, что полное значение состоит из суммы изменения быстроты движения по модулю и направлению, можно утверждать о верности формулы: a = at + an. Так как направление векторов ускорения и скорости всегда совпадают, то последний можно представить, как параметр, состоящий из двух взаимно перпендикулярных компонент:
- at — тангенциальной составляющей, совпадающей с отрезком V;
- an — перпендикулярным по отношению расположения V вектором.
Используя теорему Пифагора, можно сказать, что модуль полного ускорения равняется корню квадратному из суммы квадратов тангенциального и нормального ускорения: a = √at 2 + an 2.
Решение простых примеров
В школьном курсе на уроках физики учащимся для закрепления материала предлагается решить определённый тип задач, используя определение тангенциального ускорения. Это типовые примеры, объясняющие суть характеристики и её применение в реальной практике. Вот некоторые из них.
- Вычислить все ускорения точки, лежащей на окружности, через десять секунд после воздействия на диск вращателя. При этом учесть, что радиус окружности составит 20 см, а угол между валом и радиус вектором тела соответствует закону: j =3-t+0.2t3. Для решения примера необходимо использовать формулы для нахождения угловой скорости и ускорения. Подставив заданные значения, можно получить: w = d φ / dt = -1 + 0,2 * 3t2 и e = dw / dt = 0,6 * 2t. Применив формулу связи, легко найти ускорение: at = R * E * (0,6 * 2t) = 1,2 * Rt = 24 м2/с. Подставив в формулу нормального ускорения значения, можно вычислить и его an = V2 / R = R * (0,6 * 102 — 1)2 / 0,2 = 696 м/с2. Отсюда полное ускорение будет равняться: a = √ 242 + 6962 = 697 м/с2.
- Материальное тело перемещается по окружности, имеющей радиус 20 см. При этом тангенциальное ускорение равняется 5 см на секунду в квадрате. Определить, сколько понадобится времени, чтобы ускорения сравнялись и нормальное стало больше тангенциального в два раза. Исходя из условия, можно утверждать, что движение является равноускоренным. Поэтому можно применить формулы: an = V2 / t; at = V / t. Отсюда: t = V / at, а V = √an * R. Подставив второе выражение в первое, получится: t = (√an * R) / at. При равенстве ускорений an = at, будет верной запись: t = √R / at = √20 / 5 = 2 с. Для второго случая an = 2at, поэтому: t = (√2 * 20) / 5 = 2,8 c.
Но не всегда решаемые задания можно решить, обойдясь одной формулой. При этом значения тех или иных величин могут быть довольно сложными для проведения вычислений. В таких случаях есть резон использовать так называемые онлайн-калькуляторы. Это специализированные сайты, выполняющие подсчёт в автоматическом режиме. Из таких сервисов можно выделить: сalc, widgety, webmath. Указанные интернет-решители работают на русском языке, так что вопросов, как с их помощью выполнять расчёты, возникнуть не должно.
Сложная задача
Пусть имеется физическое тело, которое движется, замедляясь по окружности радиусом R так, что в каждый момент времени её тангенциальное и нормальное убыстрение равны друг другу по модулю. Необходимо найти зависимость скорости и полного ускорения от времени и пройденного пути. В начальный момент скорость равняется V0.
Согласно условию, тангенциальное ускорение будет отрицательным, так как точка движется, замедляясь. Для понимания задачи можно изобразить схему движения. Для этого необходимо нарисовать окружность и указать на ней вектор начальной скорости, тангенциального и нормального ускорения. Изобразить вектор полного ускорения как сумму векторов.
Нормальное ускорение можно выразить через скорость и радиус: an = V2 / R. Затем необходимо записать формулу для тангенциального ускорения: at = dV / dt. Так как они равны, то справедливым будет равенство: V2 / R = dV / dt. Анализируя уравнение, можно сделать вывод, что так как скорость и радиус положительный, то слева будет стоять величина со знаком плюс. Но, с другой стороны, со временем скорость убывает, поэтому с правой стороны нужно поставить знак минус: V2 / R = – dV / dt.
Полученное уравнение является дифференциальным и показывает зависимость скорости от времени. Равенство можно преобразовать, умножив на отношение dt / V2. В итоге должно получиться выражение: dV / V2 = – dt / R. Это уравнение можно проинтегрировать. При этом пределами интеграла с левой стороны будет V0 и V, а с правой — 0 и t. Получился обыкновенный степенной интеграл, который будет равняться: 1 / V = dt / R.
Подставив пределы, можно получить равенство: (1 / V) — (1 / V0) = t / R. Из полученной формулы следует выразить скорость: V = (V0 * R) / (R + V0 * t). Поделив числитель и знаменатель на радиус, ответ примет вид: V (t) = V0 / (1 + (V0 * t / R)).
Теперь можно найти тангенциальное убыстрение, так как оно представляет производную от скорости. После взятия производной получится: at = dV / dt = – V02 / R (1 + V0 * t / R)2 = – V2 / R. Отсюда можно написать, что модуль полного ускорения будет равняться: a = √2 *|ar| = (√2 * V2) / R. Осталось найти путь. Он совпадает с длиной дуг и равняется интегралу модуля скорости от времени. После решения должно получиться равенство: S (t) = R * ln (1 + V0 * t / R). Задача решена.
Движение
тела характеризуется скоростью и
ускорением, которые могут изменяться
во времени. Пусть материальная точка
движется по плоской криволинейной
траектории с переменной по величине и
направлению скоростью (рис. 4). Для
характеристики степени криволинейности
вводится понятие радиуса кривизны в
данной точке траектории.
Радиусом
кривизны
R
траектории
называют радиус окружности, которая
сливается с криволинейной траекторией
на бесконечно малом ее участке.
В данной
точке траектории касательная всегда
перпендикулярна радиусу кривизны.
П усть
усть
и скорость, и ускорение меняются по
величине и направлению.
Мы знаем,
что ускорение тела при движении есть ![]() .
.
Вектор
скорости
![]()
можно представить как произведение
модуля скорости
![]()
и некоторого единичного вектора
![]() ,
,
сонаправленного с вектором линейной
скорости
![]() ,
,
направленного по касательной к траектории.

Таким
образом, полное ускорение материальной
точки при криволинейном движении можно
представить в виде суммы двух слагаемых.
Первое слагаемое
![]() .
.
Вектор
![]()
направлен по касательной к траектории
и называется тангенциальным
или касательным ускорением. Его модуль
равен
![]() ,
,
поэтому
![]()
характеризует быстроту изменения
скорости криволинейного движения только
по величине, так как вектор
![]()
не изменяется.
Следовательно,
можно заключить, что
![]()
– тангенциальное ускорение, характеризует
изменение скорости по величине и
направлено по касательной к траектории.
Второе
слагаемое
![]()
называется нормальным ускорением.
Так
как вектор
![]()
сонаправлен с вектором
![]() ,
,
который определяет изменение направления
вектора линейной скорости, то он
характеризует изменение скорости
криволинейного движения по направлению.
![]()

перпендикулярно
скорости, направлено вдоль радиуса
кривизны траектории к центру окружности.
Его называют нормальным, радиальным
или центростремительным ускорением.
Можно
доказать, что
![]() .
.
Полное
ускорение материальной точки при
криволинейном движении характеризует
быстроту изменения скорости как по
величине, так и по направлению (рис.5).
![]() ,
, ![]() .
.
4. Угловая скорость и угловое ускорение.
П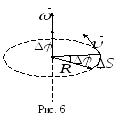 оворот
оворот
тела на некоторый угол можно задать в
виде отрезка, длина которого равна ,
а направление совпадает с осью, вокруг
которой производится поворот. Направление
поворота и изображающего его отрезка
связано правилом правого винта.
В
математике показывается, что очень
малые повороты можно рассматривать как
векторы, обозначаемые символами
![]()
или
![]() .
.
Направление вектора поворота связывается
с направлением вращения тела;
![]()
– вектор элементарного поворота тела –
является псевдовектором, так как не
имеет точки приложения.
При
вращательном движении твердого тела
каждая точка движется по окружности,
центр которой лежит на общей оси вращения
(рис. 6). При этом радиус-вектор R,
направленный от оси вращения к точке,
поворачивается за время t
на некоторый угол .
Для характеристики вращательного
движения вводится угловая скорость и
угловое ускорение.
У![]()
гловой
скоростью называется
векторная величина, равная первой
производной угла поворота тела по
времени:
Угол
в 1 радиан – это центральный угол, длина
дуги которого равна радиусу окружности;
360о
=
2
рад.
Направление
угловой скорости задается правилом
правого винта:
вектор угловой скорости сонаправлен с
вектором
![]() ,
,
то есть с поступательным движением
винта, головка которого вращается в
направлении движения точки по окружности.
Линейная
скорость точки связана с угловой
скоростью:
![]() .
.
В
векторной форме
![]() .
.
Если
в процессе вращения угловая скорость
изменяется, то возникает угловое
ускорение.
Угловое
ускорение
– векторная величина, равная первой
производной угловой скорости по времени.
Вектор угловой скорости сонаправлен с
вектором элементарного изменения
угловой скорости
![]() ,
,
происшедшего за время dt:
![]()
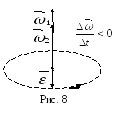
При
ускоренном движении вектор
![]()
параллелен
![]()
(рис.
7), при замедленном – противонаправлен
(рис. 8).

Угловое
ускорение возникает в системе только
тогда, когда происходит изменение
угловой скорости, то есть когда линейная
скорость движения изменяется по величине.
Изменение же скорости по величине
характеризует тангенциальное ускорение.
Найдем
связь между угловым и тангенциальным
ускорениями:
![]() .
.
Изменение
направления скорости при криволинейном
движении характеризуется нормальным
ускорением
![]() :
:
![]() .
.
Таким
образом, связь между линейными и угловыми
величинами выражается следующими
формулами:
![]() .
.
Типы
вращательного движения:
а)
переменное
–
движение, при котором изменяются
![]()
и
![]() :
:

б)
равнопеременное
– вращательное движение с постоянным
угловым ускорением:
![]()
![]() ;
;
в)
равномерное
–
вращательное
движение с постоянной угловой скоростью:
![]() .
.
Равномерное
вращательное движение можно характеризовать
периодом
![]()
и частотой вращения
![]() .
.
Период
– это время, за которое тело совершает
один полный оборот.
![]() ,
,
[T]
= c.
Частота
вращения
– это число оборотов совершаемых за
единицу времени.
![]() ,
,
[]
= c-1.
За
один оборот: ![]() ,
,
![]() ,
, ![]() .
.
Соседние файлы в папке лекции
- #
- #
- #
- #
- #
- #
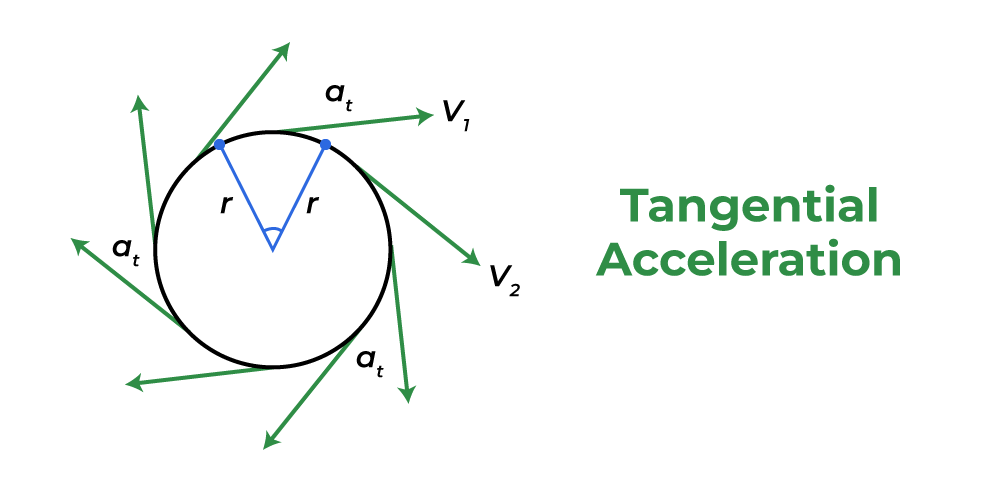
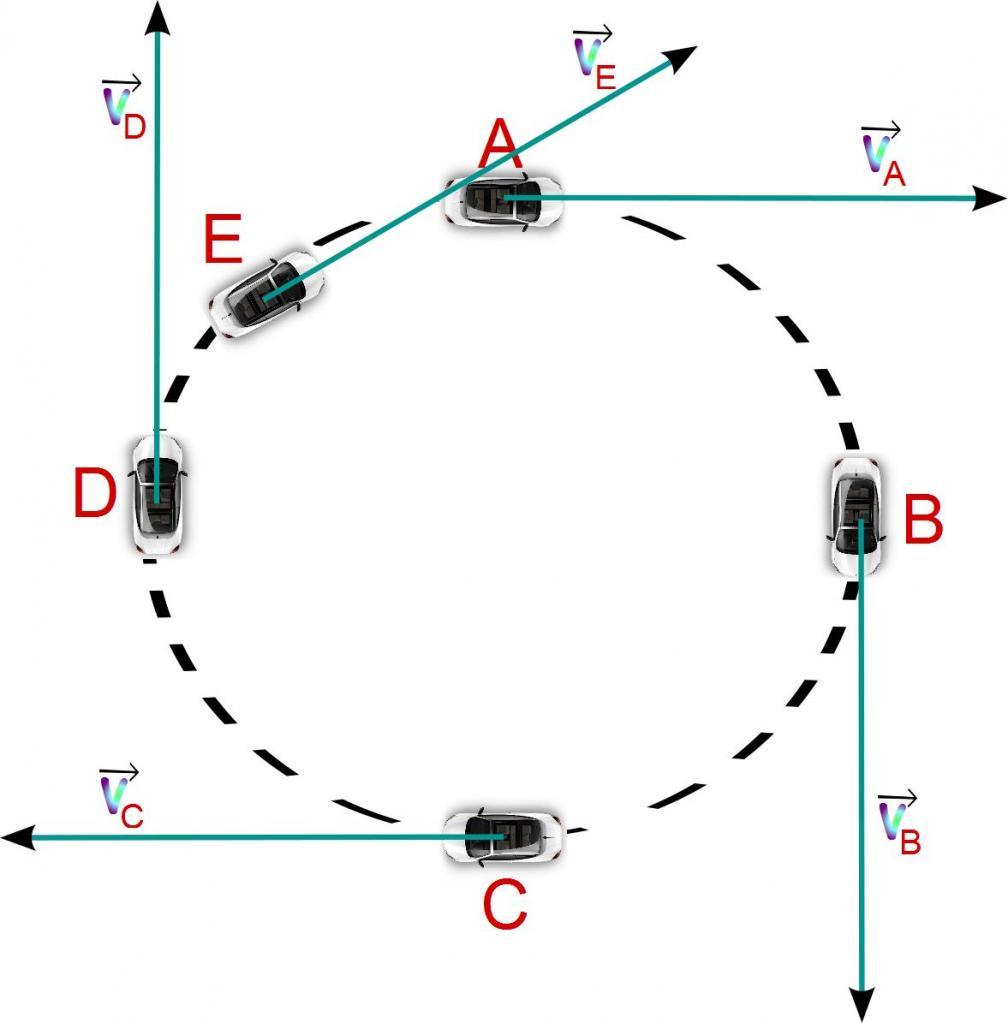
Tangential acceleration is the rate at which a tangential velocity varies in the rotational motion of any object. It acts in the direction of a tangent at the point of motion for an object. The tangential velocity also acts in the same direction for an object undergoing circular motion. Tangential acceleration only exists when an object travels in a circular path. It is positive if the body is rotating at a faster velocity, negative when the body is decelerating, and zero when the body is moving uniformly in the orbit.
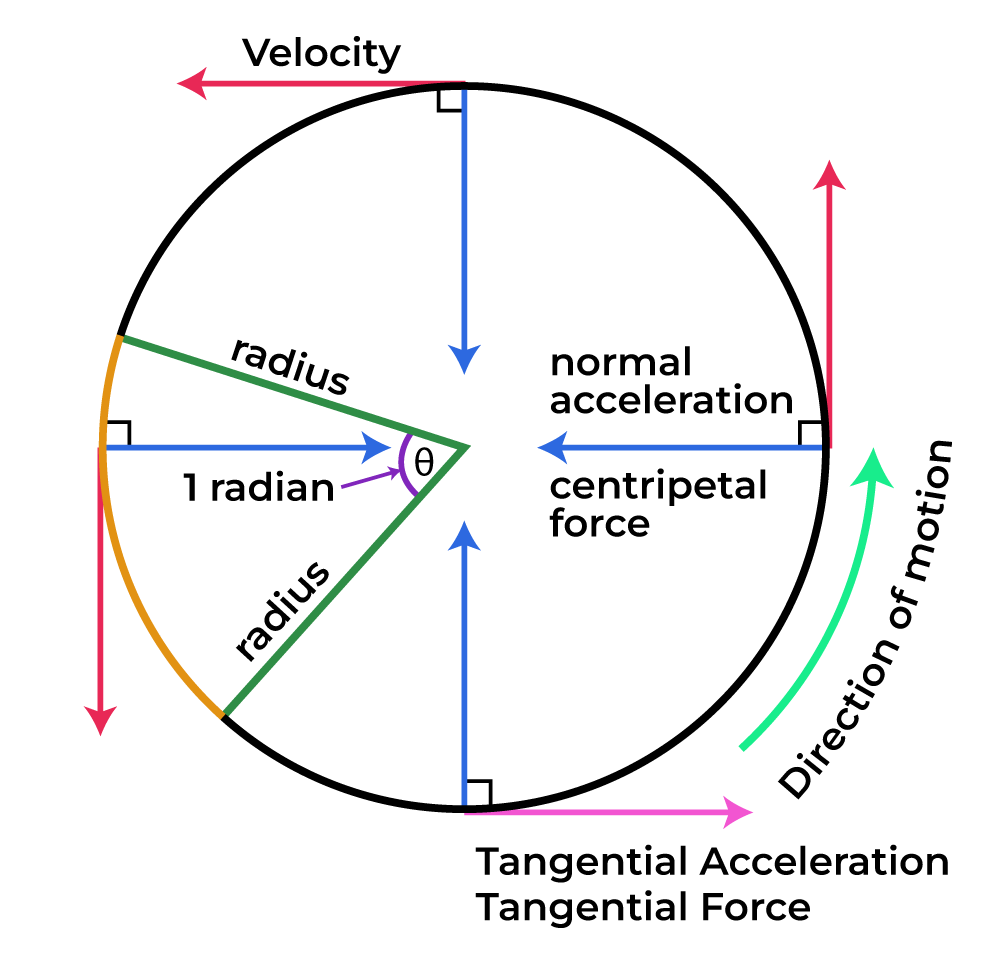
Tangential Acceleration
Tangential acceleration is similar to linear acceleration, however, it is only in one direction. This has something to do with circular motion. Tangential acceleration is therefore the rate of change of a particle’s tangential velocity in a circular orbit. It always points to the tangent of the body’s route.
Tangential acceleration works when an object moves in a circular path. Tangential acceleration is similar to linear acceleration, but it is not the same as straight-line linear acceleration. If an item moves in a straight line, it is linearly accelerating.
A car, for example, speeding around a bend in the road. The automobile is accelerating tangentially to the path’s bend.
Also Read: What is Acceleration?
Tangential Acceleration Formula
The tangential acceleration is denoted by the symbol at. Its unit of measurement is the same as linear acceleration, that is, meters per square second (m/s2). Its dimensional formula is given by [M0L1T-2]. Its formula is given by the product of the radius of a circular path and the angular acceleration of the rotating object.
at = r α
where,
- at is the tangential acceleration,
- r is the radius of circular path,
- α is the angular acceleration.
The above expression gives the relation between tangential acceleration and angular acceleration.
Now, in terms of angular velocity and time, the formula is given by,
at = r (ω/t)
where,
- at is the tangential acceleration,
- ω is the angular velocity,
- t is the time taken.
In terms of angular displacement and time, the formula is given by,
at = r (θ/t2)
where,
- at is the tangential acceleration,
- θ is the angular displacement or angle of rotation,
- t is the time taken.
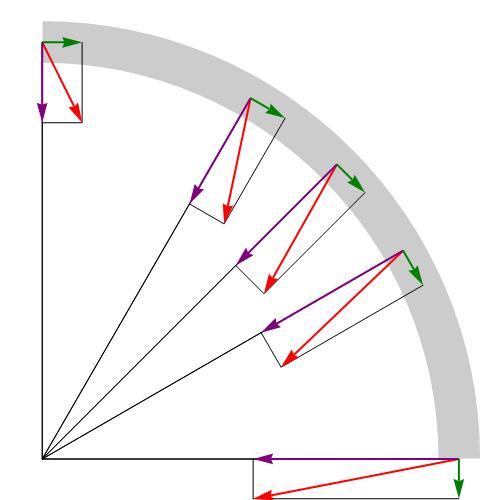
Following are the various cases possible for different values of Tangential Acceleration:
- When at is greater than Zero: The object has an accelerated motion, and the magnitude of velocity will increase with time.
- When at is Less than Zero: The object has a deaccelerated or slow motion, and the magnitude of velocity will decrease with time.
- When at is Equal to Zero: The object has a uniform motion, and the magnitude of velocity will remain constant.
Read More: Uniformly Accelerated Motion
Solved Examples on Tangential Acceleration
Example 1: Calculate the tangential acceleration if an object is undergoing circular motion for radius 5 m and angular acceleration 2 rad/s2.
Solution:
We have,
r = 5
α = 2
Using the formula we get,
at = r α
= 5 (2)
= 10 m/s2
Example 2: Calculate the tangential acceleration if an object is undergoing circular motion for a radius of 12 m and angular acceleration of 0.5 rad/s2.
Solution:
We have,
r = 12
α = 0.5
Using the formula we get,
at = r α
= 12 (0.5)
= 6 m/s2
Example 3: Calculate the angular acceleration if an object is undergoing circular motion for radius 20 m and tangential acceleration 40 m/s2.
Solution:
We have,
r = 20
at = 40
Using the formula we get,
at = r α
α = at/r
= 40/20
= 2 rad/s2
Example 4: Calculate the angular acceleration if an object is undergoing circular motion for radius 2 m and tangential acceleration 20 m/s2.
Solution:
We have,
r = 2
at = 20
Using the formula we get,
at = r α
α = at/r
= 20/2
= 10 rad/s2
Example 5: Calculate the radius if an object is undergoing circular motion for an angular acceleration of 4 rad/s2 and tangential acceleration of 20 m/s2.
Solution:
We have,
α = 4
at = 20
Using the formula we get,
at = r α
r = at/α
= 20/4
= 5 m
FAQs on Tangential Acceleration
Question 1: What are the values of radial and tangential acceleration when the motion of a particle is uniformly accelerated?
Answer:
Even though there is no tangential acceleration, the centripetal acceleration must be present to alter the direction of velocity at all times, and the centripetal acceleration is the net acceleration in this instance. This is an example of uniform circular motion.
Thus, If ar and at represent radial and tangential acceleration then, ar ≠ 0 and at = 0.
Question 2: What is Tangential Acceleration?
Answer:
Tangential acceleration is the rate at which a tangential velocity varies in the rotational motion of any object. It acts in the direction of a tangent at the point of motion for an object.
Question 3: What is the value of Tangential Acceleration in Uniform Circular Motion?
Answer:
The tangential acceleration is zero for uniform circular motion. In a uniform circular motion, angular velocity remains constant thus tangential acceleration = 0.
Read More: Uniform Circular Motion
Question 4: What is the SI Unit of Tangential Acceleration?
Answer:
The SI Unit of Tangential Acceleration is m/s2.
Question 5: What is the relation between Tangential Acceleration and Angular Acceleration?
Answer:
The Tangential Acceleration formula is given by the product of the radius of a circular path and the angular acceleration of the rotating object.
at = r α
where,
- at is the tangential acceleration,
- r is the radius of circular path,
- α is the angular acceleration.
Last Updated :
19 Dec, 2022
Like Article
Save Article
Тангенциальное, или касательное ускорение
Все тела, которые окружают нас, находятся в постоянном движении. Перемещение в пространстве тел наблюдается на всех масштабных уровнях, начиная с движения элементарных частиц в атомах вещества и заканчивая ускоренным движением галактик во Вселенной. В любом случае процесс движения происходит с ускорением. В данной статье рассмотрим подробно понятие касательного ускорения и приведем формулу, по которой его можно рассчитать.
Кинематические величины
Прежде чем вести разговор о касательном ускорении, рассмотрим, какими величинами принято характеризовать произвольное механическое перемещение тел в пространстве.
 Вам будет интересно: Как научить ребенка делению: основные принципы, простые способы решения и советы учителей
Вам будет интересно: Как научить ребенка делению: основные принципы, простые способы решения и советы учителей
В первую очередь — это путь L. Он показывает, какое расстояние в метрах, сантиметрах, километрах и так далее прошло тело за некоторый промежуток времени.
Вторая важная характеристика в кинематике — это скорость тела. В отличие от пути, она является величиной векторной и направлена вдоль траектории движения тела. Скорость определяет быстроту изменения пространственных координат во времени. Формула для ее вычисления имеет вид:
 Вам будет интересно: Как сдать досрочный ЕГЭ?
Вам будет интересно: Как сдать досрочный ЕГЭ?
Скорость – это по времени производная пути.
Наконец, третьей важной характеристикой движения тел является ускорение. Согласно определению в физике, ускорение — это величина, которая определяет изменение скорости от времени. Формулу для него можно записать в виде:
Ускорение, как и скорость, тоже является величиной векторной, однако в отличие от нее оно направлено в сторону изменения скорости. Направление ускорения также совпадает с вектором результирующей силы, оказывающей действие на тело.
Траектория движения и ускорение

Многие задачи в физике рассматривают в рамках прямолинейного движения. В этом случае, как правило, не говорят о касательном ускорении точки, а работают с линейным ускорением. Однако если перемещение тела не является линейным, то полное его ускорение может быть разложено на две составляющие:
В случае линейного движения нормальная составляющая равна нулю, поэтому о векторном разложении ускорения не говорят.
 Вам будет интересно: Малоизвестные и интересные факты о золоте
Вам будет интересно: Малоизвестные и интересные факты о золоте
Таким образом, траектория движения во многом определяет характер и составные части полного ускорения. Под траекторией движения понимают воображаемую линию в пространстве, вдоль которой тело перемещается. Любая криволинейная траектория приводит к появлению ненулевых компонент ускорения, отмеченных выше.
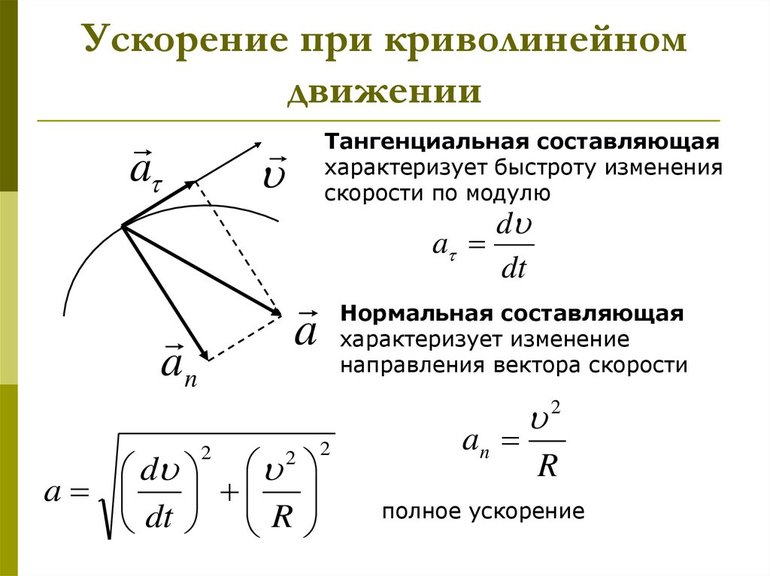
Определение тангенциального ускорения
Тангенциальное или, как его еще называют, касательное ускорение — это компонента полного ускорения, которая направлена по касательной к траектории движения. Поскольку вдоль траектории направлена также скорость, то вектор тангенциального ускорения совпадает с вектором скорости.
Выше было дано понятие ускорения как меры изменения скорости. Поскольку скорость – это вектор, то изменить ее можно либо по модулю, либо по направлению. Касательное ускорение определяет только изменение модуля скорости.
Заметим, что в случае прямолинейного движения вектор скорости своего направления не меняет, поэтому, в соответствии с приведенным определением, тангенциальное ускорение и линейное ускорение – это одна и та же величина.
Получение уравнения касательного ускорения
Предположим, что тело движется по некоторой кривой траектории. Тогда его скорость v¯ в выбранной точке можно представить в следующем виде:
Здесь v — модуль вектора v¯, ut¯ — единичный вектор скорости, направленный по касательной к траектории.
Используя математическое определение ускорения, получаем:
a¯ = dv¯/dt = d(v*ut¯)/dt = dv/dt*ut¯ + v*d(ut¯)/dt
При нахождении производной здесь использовалось свойство произведения двух функций. Мы видим, что полное ускорение a¯ в рассматриваемой точке соответствует сумме двух слагаемых. Они являются касательным и нормальным ускорением точки соответственно.
Скажем пару слов о нормальном ускорении. Оно ответственно за изменение вектора скорости, то есть за изменение направления движения тела вдоль кривой. Если явно вычислить значение второго слагаемого, то получится формула для нормального ускорения:
an = v*d(ut¯)/dt = v2/r
Нормальное ускорение направлено вдоль нормали, восстановленной в данную точку кривой. В случае движения по окружности нормальное ускорение является центростремительным.
Уравнение касательного ускорения at¯ имеет вид:
Это выражение говорит о том, что тангенциальное ускорение соответствует изменению не направления, а модуля скорости v¯ за момент времени. Поскольку тангенциальное ускорение направлено по касательной к рассматриваемой точки траектории, то оно всегда перпендикулярно нормальной компоненте.
Тангенциальное ускорение и модуль полного ускорения
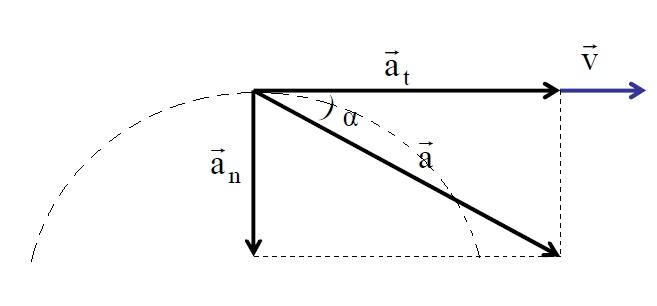
Выше была представлена вся информация, которая позволяет вычислить полное ускорение через касательное и нормальное. Действительно, так как обе компоненты являются взаимно перпендикулярными, то их вектора образуют катеты прямоугольного треугольника, гипотенузой которого является вектор полного ускорения. Этот факт позволяет записать формулу для модуля полного ускорения в следующем виде:
Угол θ между полным ускорением и тангенциальным можно определить так:
Чем больше тангенциальное ускорение, тем ближе оказываются направления касательного и полного ускорения.
Связь касательного и углового ускорения

Типичной криволинейной траекторией, по которой движутся тела в технике и природе, является окружность. Действительно, перемещение шестерен, лопастей и планет вокруг собственной оси или вокруг своих светил происходит именно по окружности. Движение, соответствующее этой траектории, называется вращением.
Кинематика вращения характеризуется теми же величинами, что кинематика движения по прямой, однако, они имеют угловой характер. Так, для описания вращения используют центральный угол поворота θ, угловые скорость ω и ускорение α. Для этих величин справедливы следующие формулы:
Предположим, что тело совершило один оборот вокруг оси вращения за время t, тогда для скорости угловой можно записать:
Линейная скорость в этом случае будет равна:
Где r – радиус траектории. Последние два выражения позволяют записать формулу связи двух скоростей:
Теперь вычислим производную по времени от левой и правой частей равенства, получим:
В правой части равенства стоит произведение углового ускорения на радиус окружности. Левая же часть равенства – это изменение модуля скорости, то есть касательное ускорение.
Таким образом, тангенциальное ускорение и аналогичная угловая величина связаны равенством:
Если предположить, что вращается диск, то тангенциальное ускорение точки при постоянной величине α будет возрастать линейно с увеличением расстояния от этой точки до оси вращения r.
Далее, решим две задачи на применение записанных выше формул.
Определение тангенциального ускорения по известной функции скорости
Известно, что скорость тела, которое перемещается по некоторой кривой траектории, описывается следующей функцией от времени:
Необходимо определить формулу касательного ускорения и найти его значение в момент времени t = 5 секунд.
Сначала запишем формулу для модуля тангенциального ускорения:
То есть для вычисления функции at(t) следует определить производную скорости по времени. Имеем:
at = d(2*t2 + 3*t + 5)/dt = 4*t + 3
Подставляя в полученное выражение время t = 5 секунд, приходим к ответу: at = 23 м/с2.
Заметим, что графиком скорости от времени в данной задаче является парабола, график же тангенциального ускорения – это прямая линия.
Задача на определение тангенциального ускорения
Известно, что материальная точка начала равноускоренное вращение с нулевого момента времени. Через 10 секунд после начала вращения ее центростремительное ускорение стало равным 20 м/с2. Необходимо определить касательное ускорение точки через 10 секунд, если известно, что радиус вращения равен 1 метр.
Сначала запишем формулу для центростремительного или нормального ускорения ac:
Пользуясь формулой связи между линейной и угловой скоростью, получим:
При равноускоренном движении скорость с угловым ускорением связаны формулой:
Подставляя ω в равенство для ac, получим:
Линейное ускорение через тангенциальное выражается так:
Подставляем последнее равенство в предпоследнее, получаем:
ac = at2/r2*t2*r = at2/r*t2 =>
Последняя формула с учетом данных из условия задачи приводит к ответу: at = 0,447 м/с2.
Кинематика материальной точки
Основные формулы кинематики материальной точки
Приведем основные формулы кинематики материальной точки. После чего дадим их вывод и изложение теории.
Радиус-вектор материальной точки M в прямоугольной системе координат Oxyz :
,
где – единичные векторы (орты) в направлении осей x, y, z .
Скорость точки:
;
;
;
Единичный вектор в направлении касательной к траектории точки:
.
Вектор можно выбрать двумя способами во взаимно противоположных направлениях. Обычно его выбирают в направлении увеличения дуговой координаты. Тогда, наряду с модулем скорости , вводят алгебраическую величину скорости . При , вектор скорости сонаправлен с . При – имеет противоположное с направление.
Скорость и ускорение точки M
Тангенциальное (касательное) ускорение:
;
;
.
Здесь, как и для скорости, – это алгебраическое касательное ускорение, . Если , то вектор касательного ускорения сонаправлен с . При – имеет противоположное с направление.
Единичный вектор, направленный к центру кривизны траектории точки (вдоль главной нормали):
.
Радиус кривизны траектории:
.
Далее приводится вывод этих формул и изложение теории кинематики материальной точки.
Радиус-вектор и траектория точки
Рассмотрим движение материальной точки M . Выберем неподвижную прямоугольную систему координат Oxyz с центром в некоторой неподвижной точке O . Тогда положение точки M однозначно определяются ее координатами ( x, y, z ) . Эти координаты являются компонентами радиус-вектора материальной точки.
Радиус-вектор точки M – это вектор , проведенный из начала неподвижной системы координат O в точку M .
,
где – единичные векторы в направлении осей x, y, z .
При движении точки, координаты изменяются со временем . То есть они являются функциями от времени . Тогда систему уравнений
(1)
можно рассматривать как уравнение кривой, заданной параметрическими уравнениями. Такая кривая является траекторией точки.
Траектория материальной точки – это линия, вдоль которой происходит движение точки.
Если движение точки происходит в плоскости, то можно выбрать оси и системы координат так, чтобы они лежали в этой плоскости. Тогда траектория определяется двумя уравнениями
В некоторых случаях, из этих уравнений можно исключить время . Тогда уравнение траектории будет иметь зависимость вида:
,
где – некоторая функция. Эта зависимость содержит только переменные и . Она не содержит параметр .
Скорость материальной точки
Согласно определению скорости и определению производной:
Производные по времени, в механике, обозначают точкой над символом. Подставим сюда выражение для радиус-вектора:
,
где мы явно обозначили зависимость координат от времени. Получаем:
,
где
,
,
– проекции скорости на оси координат. Они получаются дифференцированием по времени компонент радиус-вектора
.
Таким образом
.
Модуль скорости:
.
Касательная к траектории
С математической точки зрения, систему уравнений (1) можно рассматривать как уравнение линии (кривой), заданной параметрическими уравнениями. Время , при таком рассмотрении, играет роль параметра. Из курса математического анализа известно, что направляющий вектор для касательной к этой кривой имеет компоненты:
.
Но это есть компоненты вектора скорости точки. То есть скорость материальной точки направлена по касательной к траектории.
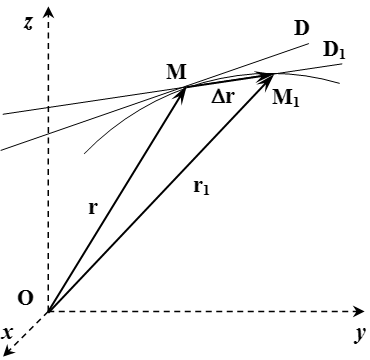
Все это можно продемонстрировать непосредственно. Пусть в момент времени точка находится в положении с радиус-вектором (см. рисунок). А в момент времени – в положении с радиус-вектором . Через точки и проведем прямую . По определению, касательная – это такая прямая , к которой стремится прямая при .
Введем обозначения:
;
;
.
Тогда вектор направлен вдоль прямой .
При стремлении , прямая стремится к касательной , а вектор – к скорости точки в момент времени :
.
Поскольку вектор направлен вдоль прямой , а прямая при , то вектор скорости направлен вдоль касательной .
То есть вектор скорости материальной точки направлен вдоль касательной к траектории.
Введем направляющий вектор касательной единичной длины:
.
Покажем, что длина этого вектора равна единице. Действительно, поскольку
, то:
.
Здесь мы направили вектор по направлению к вектору скорости, поскольку это более удобно. Но могут возникнуть случаи, когда точка останавливается и движется по той же траектории в обратном направлении. Чтобы не вводить для одной и той же точки траектории два единичных касательных вектора, нужно охватить случай, когда направлен противоположно скорости. Для этого вводят алгебраическую величину скорости:
.
Если направления векторов и совпадают, то . Если они противоположны, то .
– это проекция скорости на направление единичного вектора . Она равна скалярному произведению этих векторов:
.
Абсолютную величину (модуль) вектора скорости мы обозначаем символом с прямыми скобками, или символом без стрелки:
;
Алгебраическая величина скорости:
.
Тогда вектор скорости точки можно представить в следующем виде:
.
Ускорение материальной точки
Аналогично предыдущему, получаем компоненты ускорения (проекции ускорения на оси координат):
;
;
;
.
Модуль ускорения:
.
Тангенциальное (касательное) и нормальное ускорения
Теперь рассмотрим вопрос о направлении вектора ускорения по отношению к траектории. Для этого применим формулу:
.
Дифференцируем ее по времени, применяя правило дифференцирования произведения:
.
Вектор направлен по касательной к траектории. В какую сторону направлена его производная по времени ?
Чтобы ответить на этот вопрос, воспользуемся тем, что длина вектора постоянна и равна единице. Тогда квадрат его длины тоже равен единице:
.
Здесь и далее, два вектора в круглых скобках обозначают их скалярное произведение. Продифференцируем последнее уравнение по времени:
;
;
.
Поскольку скалярное произведение векторов и равно нулю, то эти векторы перпендикулярны друг другу. Так как вектор направлен по касательной к траектории, то вектор перпендикулярен к касательной.
Скорость, касательное и нормальное ускорение точки M
Первую компоненту называют тангенциальным или касательным ускорением:
.
Вторую компоненту называют нормальным ускорением:
.
Тогда полное ускорение:
(2) .
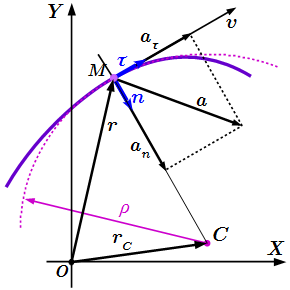
Эта формула представляет собой разложение ускорения на две взаимно перпендикулярные компоненты – касательную к траектории и перпендикулярную к ней.
Тангенциальное (касательное) ускорение
Также как и для скорости, введем алгебраическую величину вектора касательного ускорения :
.
Если , то вектор касательного ускорения сонаправлен с . Если , то эти векторы противоположны. Абсолютную величину касательного ускорения будем обозначать прямыми скобками: . Тогда
.
Умножим обе части уравнения (2) скалярно на :
.
Поскольку , то . Тогда
;
.
Здесь мы положили: .
Отсюда видно, что алгебраическая величина тангенциального ускорения равна проекции полного ускорения на направление касательной к траектории. Она также равна производной по времени алгебраической величины скорости точки: .
Подставив , имеем:
.
Здесь мы учли, что .
Найдем производную по времени модуля скорости . Применяем правила дифференцирования:
;
.
Итак,
.
Отсюда следует, что если между векторами ускорения и скорости острый угол: , то движение ускоренное. Абсолютное значение скорости возрастает. Если между ними тупой угол: , то движение замедленное. Абсолютное значение скорости убывает.
Выразим ускорение через тангенциальное и нормальное: , и учтем, что . Получим:
.
Тогда предыдущую формулировку можно выразить посредством тангенциального ускорения. Если векторы касательного ускорения и скорости направлены в одну сторону, то движение ускоренное. Если их направления противоположны, то движение замедленное.
Радиус кривизны траектории
Теперь исследуем вектор .
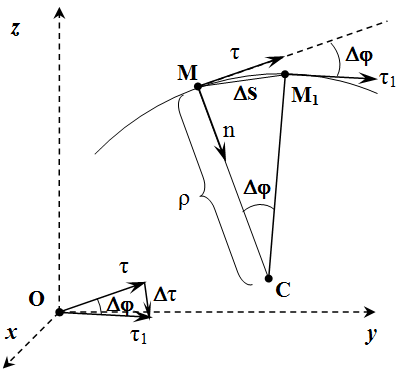
Рассмотрим вектор в два момента времени – в момент времени t и в момент t 1 . Введем обозначения: . По определению производной:
.
Пусть в момент времени t , точка находится в положении M , а в момент t 1 – в положении M 1 (см. рисунок).
Рассмотрим случай, когда алгебраическая скорость положительна: . То есть направления векторов и совпадают. Тогда точка M 1 находится справа от M . Через точки и проведем плоскости, перпендикулярные векторам и . Пересечение этих плоскостей образует прямую. Она проходит через точку C перпендикулярно плоскости рисунка. MC – это перпендикуляр, опущенный из точки M на эту прямую.
При , точка стремится к точке , а длина отрезка CM стремится к радиусу кривизны траектории ρ . Поскольку и , то угол между отрезками и равен углу между векторами и . Отложим их для наглядности из одного центра.
Абсолютное значение производной:
.
Здесь мы учли, что .
Вектор , как указывалось выше, перпендикулярен . В данном случае он направлен вдоль единичного вектора главной нормали , направленной к центру кривизны C траектории. Поэтому при имеем:
.
Теперь рассмотрим случай, когда алгебраическое значение скорости отрицательно: . В этом случае, вектор скорости противоположен . Получается тот же рисунок, только точка располагается слева от M . В результате абсолютное значение производной остается прежней:
.
Но ее направление меняется на противоположное:
.
Поскольку , то формула сохраняет прежний вид и в этом случае:
.
Нормальное ускорение
Теперь находим нормальное ускорение:
.
Перепишем результат в следующем виде:
,
где ; – единичный вектор в направлении главной нормали траектории – то есть вектор, направленный к мгновенному центру кривизны перпендикулярно касательной к траектории. Поскольку , то также является модулем нормального ускорения. Для него не нужно вводить алгебраическое значение, как мы это делали для скорости и касательного ускорения.
Нормальное ускорение всегда направлено к центру кривизны траектории.
Из формулы (2) имеем:
(4) .
Из формулы (3) находим модуль нормального ускорения:
.
Умножим обе части уравнения (2) скалярно на :
(2) .
.
Поскольку , то . Тогда
;
.
Отсюда видно, что модуль нормального ускорения равен проекции полного ускорения на направление главной нормали.
Выпишем еще раз следующую формулу:
.
Отсюда видно, что нормальное ускорение вызывает изменение направления скорости точки, и оно связано с радиусом кривизны траектории.
Радиус кривизны траектории:
.
И в заключении заметим, что формулу (4) можно переписать в следующем виде:
.
Здесь мы применили формулу для векторного произведения трех векторов:
,
в которую подставили
.
Итак, мы получили:
;
.
Приравняем модули левой и правой частей:
.
Но векторы и взаимно перпендикулярны. Поэтому
.
Тогда
.
Это известная формула из дифференциальной геометрии для кривизны кривой.
Автор: Олег Одинцов . Опубликовано: 09-02-2016 Изменено: 27-01-2020
Тангенциальное ускорение – определение, формула и измерение
Общие сведения
Первая лекция для студентов, изучающих кинематику, начинается с рассмотрения тангенциального ускорения, характеризуемого произвольным движением. По сути, рассматривается неравномерное прямолинейное движение общего вида. Кинематика входит в механику и изучает перемещение объектов без учёта сил, вызвавших их движение. Под перемещением понимают изменение положения в пространстве по отношению к другому физическому телу, которое и считается точкой отсчёта. Если изменение положения связать с координатами и временем, то образуется система отсчёта. С её помощью можно определить положение объекта в любой момент.
В кинематике любые процессы принято рассматривать, приняв тело за материальную точку. То есть его размерами и формой пренебрегают. При изменении за какой-то промежуток времени точка проходит путь, описывающийся линией — траекторией. Она является скалярной величиной, а само перемещение — векторной. Движение материальной точки может происходить с разной скоростью и ускорением. Быстроту движения разделяют на среднюю и мгновенную. Вторая определяется как предел, к которому стремится скорость на бесконечно малом временном интервале: v = Δs / Δt (Δt → 0).
Перемещение может происходить с ускорением. Это физическая величина, определяющая изменение быстроты перемещения. Иными словами, показывает изменение положения за единицу времени. Измеряется она в метрах на секунду в квадрате. В кинематике существует три вида ускорения:
- Тангенциальное — направленное вдоль касательного пути точки в определённый момент. Из-за происхождения слова его часто называют касательным.
- Нормальное — совпадающее с нормалью траектории изменения положения.
- Полное — определяющееся суммой тангенциального и нормального ускорений.
Но также используется понятие «вектор среднего ускорения тела». Определяется он как приращение вектора скорости за промежуток времени: aср = Δv / Δt. При этом он будет совпадать по направлению с вектором скорости, то есть направлен в сторону вогнутости траектории.
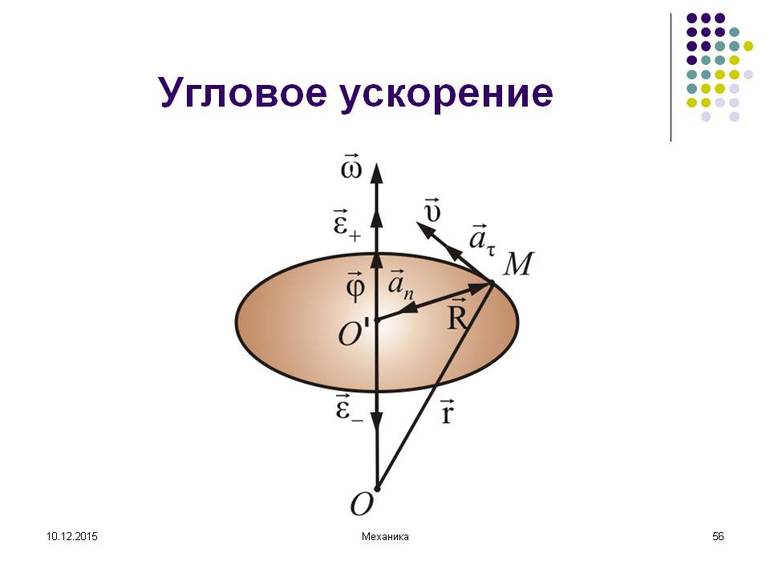
Угловое ускорение
Если имеется какая-то точка, находящаяся на вращающемся теле, то скорость её направлена по касательной. Когда движение равномерное, то линейная скорость связана с угловой равенством: v = w * r. А вот ускорение тела будет направлено по радиусу к центру окружности, причём модуль вычисляется как a = v / r либо если это точка на вращающемся теле: a = w2 * r.
В момент, когда тело поворачивается за небольшой промежуток времени на угол дельта фи, угловую скорость можно связать с условием поворота через формулу: w = Δ φ / Δ t. Если тело вращается равномерно, то промежуток времени может быть любым. В ином случае эта величина будет равна мгновенной угловой скорости.
Можно представить, что материальная точка движется неравномерно, то есть изменяется угловая скорость тела. Линейная скорость не будет представлять собой постоянную величину, в отличие от равномерного перемещения. Угол поворота равняется: w = v / r. Так как скорость не может быть константой, то отсюда следует, что и угловая скорость не будет постоянной величиной. Её изменение обозначают Δw. Она равняется разности конечной угловой скорости и начальной: Δw = wк — wн.
Изменение угловой скорости можно разделить на промежуток времени, за который оно поменяло значение: (wк — wн) / Δt. По сути, получается ускорение. Обозначается характеристика буквой эпсилон E и называется угловым ускорением. Измеряется характеристика в радианах на секунду в квадрате. Её смысл заключается в описании физической величины через отношение изменения угловой скорости тела за небольшой промежуток времени к длительности этого промежутка.
Пусть есть дуга окружности с центром. В начальный момент времени у тела есть скорость, направленная по касательной к траектории v0. Через некоторое время точка переместится по окружности на небольшое расстояние. Так как движение неравномерное, модуль скорости изменится v ≠ v0. Для того чтобы найти ускорение тела, нужно воспользоваться следующей формулой: a = Δv / Δt, при этом Δv = v — v0.
Чтобы найти эту разность, нужно воспользоваться правилом треугольника. Для этого следует перенести вектор V0 к V и соединить их линией. Радиус от центра к материальной точке можно обозначить R. Дельта V можно представить, как сумму взаимно перпендикулярных векторов. Один из них будет направленных тангенциально к радиусу, в физике обозначают его Δ Vτ, а другой радиально Δ Vr. В итоге: ΔV = Δ Vτ + Δ Vr.
Вывод формулы
Для доказательства формулы необходимо рассмотреть плоскую систему координат, в которой материальная точка изменяет своё положение по криволинейной траектории. В начальный момент её скорость будет равняться V0. Через некоторое время она изменится и станет V. На графике в плоском измерении это можно представить в виде синусоиды. В определённый момент времени скорость превышает начальную: V > V0. На схеме вектор нулевой скорости направлен из точки t0 вверх по касательной, а вектор V с нижней точки синусоиды параллельно оси ординаты.
Исходя из графика, можно сделать два вывода:
- Через промежуток времени Δt скорость изменяется как по направлению, так и по модулю: Δt = t — t0.
- Вектор изменения скорости, определяемый по правилу треугольника, будет равняться разности существующей скорости на данный момент и начальной: Δv = v — v0.
Для того чтобы построить вектор изменения Δv, нужно из конечной точки отрезка V0 провести линию к рассматриваемой точки, характеризующейся во времени скоростью V. Вершины полученного треугольника можно обозначить буквами ABD. Из верхнего угла B на сторону AD можно опустить медиану. Точка пересечения со стороной пусть будет C. Получается, что вектор Δv можно разложить на две составляющие — отрезки BC и СD. Причём медиана равняется Δvn, а изменение по оси ординаты Δvt.
Для разложения необходимо использовать вектор АС, длина которого совпадает с Vo по модулю: |AC| = |AB| = V0. Так как Δvn — результирующий вектор, то его можно вычислить через сумму: Δv = Δvn + Δvt. Причём первый член в равенстве характеризует изменение быстроты за промежуток времени по направлению, а второй — по модулю. Исходя из того, что t не равняется нулю, на него можно разделить левую и правую часть равенства: Δv / Δt = Δvn / Δt + Δvt / Δt. Если дельта-времени стремится к нулю, то формулу можно переписать в виде: lim Δv / Δt = lim Δvn / Δt + lim Δvt / Δt.
Учитывая связь между ускорениями и то, что полное значение состоит из суммы изменения быстроты движения по модулю и направлению, можно утверждать о верности формулы: a = at + an. Так как направление векторов ускорения и скорости всегда совпадают, то последний можно представить, как параметр, состоящий из двух взаимно перпендикулярных компонент:
- at — тангенциальной составляющей, совпадающей с отрезком V;
- an — перпендикулярным по отношению расположения V вектором.
Используя теорему Пифагора, можно сказать, что модуль полного ускорения равняется корню квадратному из суммы квадратов тангенциального и нормального ускорения: a = √at 2 + an 2 .
Решение простых примеров
В школьном курсе на уроках физики учащимся для закрепления материала предлагается решить определённый тип задач, используя определение тангенциального ускорения. Это типовые примеры, объясняющие суть характеристики и её применение в реальной практике. Вот некоторые из них.
- Вычислить все ускорения точки, лежащей на окружности, через десять секунд после воздействия на диск вращателя. При этом учесть, что радиус окружности составит 20 см, а угол между валом и радиус вектором тела соответствует закону: j =3-t+0.2t 3 . Для решения примера необходимо использовать формулы для нахождения угловой скорости и ускорения. Подставив заданные значения, можно получить: w = d φ / dt = -1 + 0,2 * 3t 2 и e = dw / dt = 0,6 * 2t. Применив формулу связи, легко найти ускорение: at = R * E * (0,6 * 2t) = 1,2 * Rt = 24 м 2 /с. Подставив в формулу нормального ускорения значения, можно вычислить и его an = V 2 / R = R * (0,6 * 10 2 — 1) 2 / 0,2 = 696 м/с 2 . Отсюда полное ускорение будет равняться: a = √ 24 2 + 696 2 = 697 м/с 2 .
- Материальное тело перемещается по окружности, имеющей радиус 20 см. При этом тангенциальное ускорение равняется 5 см на секунду в квадрате. Определить, сколько понадобится времени, чтобы ускорения сравнялись и нормальное стало больше тангенциального в два раза. Исходя из условия, можно утверждать, что движение является равноускоренным. Поэтому можно применить формулы: an = V2 / t; at = V / t. Отсюда: t = V / at, а V = √an * R. Подставив второе выражение в первое, получится: t = (√an * R) / at. При равенстве ускорений an = at, будет верной запись: t = √R / at = √20 / 5 = 2 с. Для второго случая an = 2at, поэтому: t = (√2 * 20) / 5 = 2,8 c.
Но не всегда решаемые задания можно решить, обойдясь одной формулой. При этом значения тех или иных величин могут быть довольно сложными для проведения вычислений. В таких случаях есть резон использовать так называемые онлайн-калькуляторы. Это специализированные сайты, выполняющие подсчёт в автоматическом режиме. Из таких сервисов можно выделить: сalc, widgety, webmath. Указанные интернет-решители работают на русском языке, так что вопросов, как с их помощью выполнять расчёты, возникнуть не должно.
Сложная задача
Пусть имеется физическое тело, которое движется, замедляясь по окружности радиусом R так, что в каждый момент времени её тангенциальное и нормальное убыстрение равны друг другу по модулю. Необходимо найти зависимость скорости и полного ускорения от времени и пройденного пути. В начальный момент скорость равняется V0.
Согласно условию, тангенциальное ускорение будет отрицательным, так как точка движется, замедляясь. Для понимания задачи можно изобразить схему движения. Для этого необходимо нарисовать окружность и указать на ней вектор начальной скорости, тангенциального и нормального ускорения. Изобразить вектор полного ускорения как сумму векторов.
Нормальное ускорение можно выразить через скорость и радиус: an = V 2 / R. Затем необходимо записать формулу для тангенциального ускорения: at = dV / dt. Так как они равны, то справедливым будет равенство: V 2 / R = dV / dt. Анализируя уравнение, можно сделать вывод, что так как скорость и радиус положительный, то слева будет стоять величина со знаком плюс. Но, с другой стороны, со временем скорость убывает, поэтому с правой стороны нужно поставить знак минус: V 2 / R = – dV / dt.
Полученное уравнение является дифференциальным и показывает зависимость скорости от времени. Равенство можно преобразовать, умножив на отношение dt / V 2 . В итоге должно получиться выражение: dV / V 2 = – dt / R. Это уравнение можно проинтегрировать. При этом пределами интеграла с левой стороны будет V0 и V, а с правой — 0 и t. Получился обыкновенный степенной интеграл, который будет равняться: 1 / V = dt / R.
Подставив пределы, можно получить равенство: (1 / V) — (1 / V0) = t / R. Из полученной формулы следует выразить скорость: V = (V0 * R) / (R + V0 * t). Поделив числитель и знаменатель на радиус, ответ примет вид: V (t) = V0 / (1 + (V0 * t / R)).
Теперь можно найти тангенциальное убыстрение, так как оно представляет производную от скорости. После взятия производной получится: at = dV / dt = – V02 / R (1 + V0 * t / R)2 = – V2 / R. Отсюда можно написать, что модуль полного ускорения будет равняться: a = √2 *|ar| = (√2 * V2) / R. Осталось найти путь. Он совпадает с длиной дуг и равняется интегралу модуля скорости от времени. После решения должно получиться равенство: S (t) = R * ln (1 + V0 * t / R). Задача решена.
[spoiler title=”источники:”]
http://1cov-edu.ru/mehanika/kinematika/tochki/
http://nauka.club/fizika/tangentsialno%D0%B5-uskoreni%D0%B5.html
[/spoiler]
