В очередной раз меня попросили решить пару задачек по физике, и я вдруг обнаружил, что не могу решить их с ходу. Немного погуглив, я обнаружил, что сайты в топе выдачи содержат сканы одного и того же учебника и не описывают конкретных примеров решений задачи о том, как найти вектор скорости и ускорения материальной точки. По-этому я решил поделиться с миром примером своего решения.
Траектория движения материальной точки через радиус-вектор
Подзабыв этот раздел математики, в моей памяти уравнения движения материальной точки всегда представлялись при помощи знакомой всем нам зависимости y(x) , и взглянув на текст задачи, я немного опешил когда увидел векторы. Оказалось, что существует представление траектории материальной точки при помощи радиус-вектора – вектора, задающего положение точки в пространстве относительно некоторой заранее фиксированной точки, называемой началом координат.

Формула траектория движения материальной точки помимо радиус-вектора описывается так же ортами – единичными векторами i, j , k в нашем случае совпадающими с осями системы координат. И, наконец, рассмотрим пример уравнения траектории материальной точки (в двумерном пространстве):

Что интересного в данном примере? Траектория движения точки задается синусами и косинусами, как вы думаете, как будет выглядеть график в всем нам знакомом представлении y(x) ? “Наверное какой-то жуткий”, подумали вы, но все не так сложно как кажется! Попробуем построить траекторию движения материальной точки y(x), если она движется по представленному выше закону:

Здесь я заметил квадрат косинуса, если вы в каком-нибудь примере видите квадрат синуса или косинуса, это значит что нужно применять основное тригонометрическое тождество, что я и сделал (вторая формула) и преобразовал формулу координаты y, чтобы вместо синуса подставить в нее формулу изменения x:

В итоге жуткий закон движения точки оказался обычной параболой, ветви которой направлены вниз. Надеюсь, вы поняли примерный алгоритм построения зависимости y(x) из представления движения через радиус-вектор. Теперь перейдем к нашему главному вопросу: как же найти вектор скорости и ускорения материальной точки, а так же их модули.
Вектор скорости материальной точки

Всем известно, что скорость материальной точки – это величина пройденного пути точкой за единицу времени, то есть производная от формулы закона движения. Чтобы найти вектор скорости нужно взять производную по времени. Давайте рассмотрим конкретный пример нахождения вектора скорости.
Пример нахождения вектора скорости
Имеем закон перемещения материальной точки:

Теперь нужно взять производную от этого многочлена, если вы забыли как это делается, то вот вам таблица производных различных функций. В итоге вектор скорости будет иметь следующий вид:

Все оказалось проще, чем вы думали, теперь найдем вектор ускорения материальной точки по тому же самому закону, представленному выше.
Как найти вектор ускорения материальной точки

Вектор ускорения точки это векторная величина, характеризующая изменение с течением времени модуля и направления скорости точки. Чтобы найти вектор ускорения материальной точки в нашем примере, нужно взять производную, но уже от формулы вектора скорости, представленной чуть выше:

Модуль вектора скорости точки
Теперь найдем модуль вектора скорости материальной точки. Как вы знаете из 9-го класса, модуль вектора – это его длина, в прямоугольных декартовых координатах равна квадратному корню из суммы квадратов его координат. И откуда же из полученного нами выше вектора скорости взять его координаты спросите вы? Все очень просто:

Теперь достаточно только подставить время, указанное в задаче и получить конкретное числовое значение.
Модуль вектора ускорения
Как вы поняли из написанного выше (и из 9-го класса), нахождение модуля вектора ускорения происходит тем же образом, что и модуля вектора скорости: извлекаем корень квадратный из суммы квадратов координат вектора, все просто! Ну и вот вам, конечно же, пример:

Как вы видите, ускорение материальной точки по заданному выше закону не зависит от времени и имеет постоянную величину и направление.
Еще примеры решений задачи нахождения вектора скорости и ускорения
А вот тут вы можете найти примеры решения и других задач по физике на тему “механика твердых тел”. А для тех, кто не совсем понял как найти вектор скорости и ускорения, вот вам еще парочка примеров из сети без всяких лишних объяснений, надеюсь, они вам помогут.

Если у вас возникли какие-нибудь вопросы, вы можете задать их в комментариях.
Скорость, Вектор скорости и траектория, Сложение скоростей
Скорость
Средняя скорость частицы характеризует быстроту ее движения за конечный промежуток времени. Неограниченно уменьшая этот промежуток, мы придем к физической величине, характеризующей быстроту движения в данный момент времени. Такая величина называется мгновенной скоростью или просто скоростью:

обозначает математическую операцию перехода к пределу. Под этим символом записывается условие, при котором выполняется данный предельный переход; в рассматриваемом случае это стремление к нулю промежутка времени. При вычислении скорости по этому правилу мы убедимся, что уменьшение промежутка времени приводит к тому, что на некотором этапе получаемые очередные значения средней скорости будут все меньше и меньше отличаться друг от друга. Поэтому на практике при нахождении скорости можно остановиться на конечном значении, достаточно малом для получения требуемой точности значения скорости.

Вектор скорости и траектория.
Рассматриваемый предельный переход имеет ясный геометрический смысл. Поскольку вектор перемещения направлен по хорде, соединяющей две точки траектории, то при сближении этих точек, происходящем при, он принимает положение, соответствующее касательной к траектории в данной точке. Это значит, что вектор скорости направлен по касательной к траектории. Так будет в любой точке траектории (рис. 14). При прямолинейной траектории движения вектор скорости направлен вдоль этой прямой.
Скорость прохождения пути.
Аналогичным переходом определяется мгновенная скорость прохождения пути:

Для плавной кривой, каковой является траектория любого непрерывного механического движения, длина дуги тем меньше отличается от длины стягивающей ее хорды, чем короче эта дуга. В пределе эти длины совпадают. Поэтому при можно считать, что . Это означает, что скорость прохождения пути равна модулю мгновенной скорости . Движение, при котором модуль скорости остается неизменным, называется равномерным. В случае прямолинейной траектории при равномерном движении вектор скорости постоянен, а в случае криволинейной траектории изменяется только его направление.
Сложение скоростей.
Если тело одновременно участвует в нескольких движениях, то его скорость равна векторной сумме скоростей каждого из этих движений. Это непосредственно следует из правила сложения перемещений: так как , то после деления на получаем

Иногда бывает удобно представить некоторое сложное движение как суперпозицию, т. е. наложение двух простых движений. В этом случае равенство (3) можно трактовать как правило разложения вектора скорости на составляющие.
По этой ссылке вы найдёте полный курс лекций по математике:
Задачи.
1.
Переправа через реку. Скорость течения в реке с параллельными берегами всюду одинакова и равна. Ширина реки (рис. 15). Катер может плыть со скоростью относительно воды. На какое расстояние s снесет катер вниз по течению реки, если при переправе нос катера направить строго поперек берегов?

Катер участвует одновременно в двух движениях: со скоростью , направленной поперек течения, и вместе с водой со скоростью которая направлена параллельно берегу. В соответствии с правилом сложения скоростей полная скорость катера относительно берегов равна векторной сумме (рис. 16). Очевидно, что движение катера происходит по прямой, направленной вдоль вектора. Искомое расстояние s, на которое снесет катер при переправе, можно найти из подобия треугольника, образованному векторами скоростей:

Эту задачу легко решить и не прибегая к сложению векторов скоростей.
Очевидно, что расстояние s равно произведению скорости течения на время в течение которого катер пересекает реку. Это время можно найти, разделив ширину реки на скорость движения катера поперек реки. Таким образом, находим Рис. 16. Сложение скоростей при переправе через .В этой простой задаче второй способ решения предпочтительнее, так как он проще. Однако уже при небольшом усложнении условия задачи становятся отчетливо видны преимущества первого способа, основанного на сложении векторов скоростей.
2. Переправа поперек реки. Предположим, что теперь нам нужно переправиться на катере через ту же реку точно поперек, т. е. попасть в точку В, лежащую напротив начальной точки А (рис. 17). Как нужно направить нос катера при переправе? Сколько времени займет такая переправа?Решение. В рассматриваемом случае полная скорость v катера относительно берегов, равная векторной сумме скоростей должна быть направлена поперек реки.

Из рис. 17 сразу видно, что вектор, вдоль которого и смотрит нос катера, должен отклоняться на некоторый угол а вверх по течению реки от направления . Синус этого угла равен отношению модулей скоростей течения и катера относительно воды. Переправа поперек реки без сноса возможна только в том случае, когда скорость катера относительно воды больше скорости течения. Это сразу видно либо из треугольника скоростей на рис. 17 (гипотенуза всегда больше катета), либо из формулы (синус угла а должен быть меньше единицы).Время переправы найдем, разделив ширину реки на полную скорость катера по теореме Пифагора.
Возможно вам будут полезны данные страницы:
3. Снос при быстром течении.
Предположим теперь, что скорость катера относительно воды меньше скорости течения: В таком случае переправа без сноса невозможна. Как следует направить нос катера при переправе, чтобы снос получился минимальным? На какое расстояние этом снесет катер? Решение. Полная скорость относительно берегов во всех рассматриваемых случаях дается формулой. Однако теперь нагляднее выполнить сложение векторов и по правилу треугольника (рис. 18) первым изображаем век гор для которого мы знаем модуль направление, а затем к его концу пристраиваем начало вектора известен только модуль, направление еще предстоит выбрать. Этот выбор нужно сделать так, вектор результирующей скорости как можно меньше отклонялся от направления поперек реки.

Рис. 19. Определение курса (направление вектора) переправы минимальным сносом 18. Сложение скоростей переправе Конец любом направлении должен лежать на окружности радиуса центр которой совпадает концом вектора. Эта окружность показана Так условию задачи то точка соответствующая началу лежит вне этой окружности.
Из рисунка видно, что образует прямой
наименьший угол тогда, когда он направлен касательной Следовательно, перпендикулярен вектору треугольник прямоугольный. Таким образом, направлять вверх течению под углом линии Синус этого угла дастся выражением Траектория направлена вдоль вектора, т.е. она перпендикулярна направлению, в котором смотрит катера. Это значит, своей траектории катер движется боком. другом берегу реки причалит точке, до найти из подобия треугольников. Модуль находится теореме Пифагора. результате получаем
4. Лодка тросе. Лодку подтягивают за привязанный носу трос, наматывая равномерно вращающийся барабан Барабан установлен высоком берегу. какой скоростью лодка тот момент, трос горизонтом? Трос выбирается барабаном скоростью.

Решение.
Точка троса, где он привязан к лодке, движется с той же скоростью, что и лодка. Эта скорость v направлена горизонтально. Чтобы связать ее со скоростью выбирания троса, нужно сообразить, что движение троса сводится к повороту вокруг точки В, где он касается барабана, и скольжению вдоль собственного направления, т. е. прямой . Поэтому естественно разложить скорость точки на две составляющие , направленные вдоль и поперек троса (рис. 21). Скорость , направленная поперек, связана с поворотом троса. Модуль скорости направленной вдоль троса, — это и есть данное в условии задачи значение скорости.

По мере приближения лодки к берегу угол а становится больше. Это значит, что cos а убывает и искомая скорость возрастает. Задача для самостоятельного решения Человек находится в поле на расстоянии от прямолинейного участка шоссе. Слева от себя он замечает движущийся по шоссе автомобиль. В каком направлении следует бежать к шоссе, чтобы выбежать на дорогу впереди автомобиля и как можно дальше от него? Скорость автомобиля и, скорость человека.

• Объясните, почему вектор скорости всегда направлен по касательной к траектории.
• В некоторых случаях траектория движения частицы может иметь изломы. Приведите примеры таких движений. Что можно сказать о направлении скорости в точках, где траектория имеет излом?
• В случае непрерывного механического движения вектор скорости не испытывает скачков ни по модулю, ни по направлению. Появление скачков скорости всегда связано с некоторой идеализацией реального процесса. Какие идеализации присутствовали в приведенных вами примерах траекторий с изломами?
• Найдите ошибку в приводимом ниже решении задачи 4. Разложим скорость , точки троса на вертикальную и горизонтальную составляющие (рис. 22). Горизонтальная составляющая это и есть искомая скорость лодки. Поэтому и (неверно!).
Скорость как производная.
Вернемся к выражению (1) для мгновенной скорости. При движении частицы ее радиус-вектор г изменяется, т. е. является некоторой функцией времени:. Перемещение Дг за промежуток времени At представляет собой разность радиусов-векторов в моменты времени. Поэтому формулу (1) можно переписать в виде В математике такую величину называют производной от функции по времени Для нее используют следующие обозначения. Последнее обозначение (точка над буквой) характерно именно для производной по времени. Отметим, что в данном случае производная представляет собой вектор, так как получается в результате дифференцирования векторной функции по скалярному аргументу. Для модуля мгновенной скорости в соответствии справедливо выражение в начале статьи.
Присылайте задания в любое время дня и ночи в ➔ 
Официальный сайт Брильёновой Натальи Валерьевны преподавателя кафедры информатики и электроники Екатеринбургского государственного института.
Все авторские права на размещённые материалы сохранены за правообладателями этих материалов. Любое коммерческое и/или иное использование кроме предварительного ознакомления материалов сайта natalibrilenova.ru запрещено. Публикация и распространение размещённых материалов не преследует за собой коммерческой и/или любой другой выгоды.
Сайт предназначен для облегчения образовательного путешествия студентам очникам и заочникам по вопросам обучения . Наталья Брильёнова не предлагает и не оказывает товары и услуги.
Вектор скорости и ускорения материальной точки и их модули. Пример решения задач.
В очередной раз меня попросили решить пару задачек по физике, и я вдруг обнаружил, что не могу решить их с ходу. Немного погуглив, я обнаружил, что сайты в топе выдачи содержат сканы одного и того же учебника и не описывают конкретных примеров решений задачи о том, как найти вектор скорости и ускорения материальной точки. По-этому я решил поделиться с миром примером своего решения.
Траектория движения материальной точки через радиус-вектор
Подзабыв этот раздел математики, в моей памяти уравнения движения материальной точки всегда представлялись при помощи знакомой всем нам зависимости y(x) , и взглянув на текст задачи, я немного опешил когда увидел векторы. Оказалось, что существует представление траектории материальной точки при помощи радиус-вектора – вектора, задающего положение точки в пространстве относительно некоторой заранее фиксированной точки, называемой началом координат.
Формула траектория движения материальной точки помимо радиус-вектора описывается так же ортами – единичными векторами i, j , k в нашем случае совпадающими с осями системы координат. И, наконец, рассмотрим пример уравнения траектории материальной точки (в двумерном пространстве):
Что интересного в данном примере? Траектория движения точки задается синусами и косинусами, как вы думаете, как будет выглядеть график в всем нам знакомом представлении y(x) ? “Наверное какой-то жуткий”, подумали вы, но все не так сложно как кажется! Попробуем построить траекторию движения материальной точки y(x), если она движется по представленному выше закону:
Здесь я заметил квадрат косинуса, если вы в каком-нибудь примере видите квадрат синуса или косинуса, это значит что нужно применять основное тригонометрическое тождество, что я и сделал (вторая формула) и преобразовал формулу координаты y, чтобы вместо синуса подставить в нее формулу изменения x:
В итоге жуткий закон движения точки оказался обычной параболой, ветви которой направлены вниз. Надеюсь, вы поняли примерный алгоритм построения зависимости y(x) из представления движения через радиус-вектор. Теперь перейдем к нашему главному вопросу: как же найти вектор скорости и ускорения материальной точки, а так же их модули.
Вектор скорости материальной точки
Всем известно, что скорость материальной точки – это величина пройденного пути точкой за единицу времени, то есть производная от формулы закона движения. Чтобы найти вектор скорости нужно взять производную по времени. Давайте рассмотрим конкретный пример нахождения вектора скорости.
Пример нахождения вектора скорости
Имеем закон перемещения материальной точки:
Теперь нужно взять производную от этого многочлена, если вы забыли как это делается, то вот вам таблица производных различных функций. В итоге вектор скорости будет иметь следующий вид:
Все оказалось проще, чем вы думали, теперь найдем вектор ускорения материальной точки по тому же самому закону, представленному выше.
Как найти вектор ускорения материальной точки
Вектор ускорения точки это векторная величина, характеризующая изменение с течением времени модуля и направления скорости точки. Чтобы найти вектор ускорения материальной точки в нашем примере, нужно взять производную, но уже от формулы вектора скорости, представленной чуть выше:
Модуль вектора скорости точки
Теперь найдем модуль вектора скорости материальной точки. Как вы знаете из 9-го класса, модуль вектора – это его длина, в прямоугольных декартовых координатах равна квадратному корню из суммы квадратов его координат. И откуда же из полученного нами выше вектора скорости взять его координаты спросите вы? Все очень просто:
Теперь достаточно только подставить время, указанное в задаче и получить конкретное числовое значение.
Модуль вектора ускорения
Как вы поняли из написанного выше (и из 9-го класса), нахождение модуля вектора ускорения происходит тем же образом, что и модуля вектора скорости: извлекаем корень квадратный из суммы квадратов координат вектора, все просто! Ну и вот вам, конечно же, пример:
Как вы видите, ускорение материальной точки по заданному выше закону не зависит от времени и имеет постоянную величину и направление.
Еще примеры решений задачи нахождения вектора скорости и ускорения
А вот тут вы можете найти примеры решения и других задач по физике на тему “механика твердых тел”. А для тех, кто не совсем понял как найти вектор скорости и ускорения, вот вам еще парочка примеров из сети без всяких лишних объяснений, надеюсь, они вам помогут.
Если у вас возникли какие-нибудь вопросы, вы можете задать их в комментариях.
Основные понятия кинематики. Скорость. Средняя скорость. Относительная скорость. Сложение перемещений и скоростей
Этот видеоурок доступен по абонементу
У вас уже есть абонемент? Войти

Этот урок посвящён разделу физики, который называется кинематика. Мы узнаем, что изучает кинематика, основные понятия этого раздела. Также на этом уроке будут подробно показаны решения трёх типовых задач различной сложности, которые взяты из сборника задач для подготовки к единому государственному экзамену. Задачи на нахождение средней и относительной скорости.
[spoiler title=”источники:”]
http://interneturok.ru/lesson/physics/11-klass/podgotovka-k-ege/osnovnye-ponyatiya-kinematiki-skorost-srednyaya-skorost-otnositelnaya-skorost-slozhenie-peremescheniy-i-skorostey
[/spoiler]
Для характеристики
быстроты движения вводится понятие
скорости.
Определение:
Средней
скоростью движения точки за интервал
времени от
![]() до
до![]() называется
называется
векторная величина равная отношению
приращения радиус-вектора точки за этот
промежуток времени к его продолжительности![]() .
.
![]() – средняя скорость.
– средняя скорость.
![]()
Определение:
Скорость
(или мгновенная скорость) точки называется
векторная величина, равная первой
производной по времени от радиус-вектора.
![]()
![]()
Вектор скорости
характеризует движение, как по величине,
так и по направлению. Вектор скорости
всегда направлен по касательной к
траектории в сторону движения.
Определение:
Модуль
скорости равен первой производной по
времени от пройденного пути.
![]()
Разложим вектор
скорости по базису прямоугольной
декартовой системы координат:
![]() , гдеVx,
, гдеVx,
Vy,
Vz
проекции вектора скорости на соответствующую
ось, которые соответственно равны:

где
![]() – это иксовая проекция радиус-вектора
– это иксовая проекция радиус-вектора
материальной точки.
![]() В координатном
В координатном
представлении вектор скорости имеет
вид:
![]()
Модуль вектора
скорости в координатном представлении:
![]()
Обратное соотношение.
Представим радиус
вектор скорости посредством определенного
и неопределенного интеграла:
![]()

где t,
t0
– начальный и конечный момент времени.
Представление
пройденного пути через модуль скорости
посредством определенного и неопределенного
интеграла.
![]()

§4. Вектор ускорения.
Для характеристики
быстроты изменения вектора скорости
точки в механике вводится понятие
ускорения.
Определение:
Среднее
ускорение за интервал времени от
![]() до
до![]() называется векторная величина равная
называется векторная величина равная
отношению приращения вектора скорости
точки за данный интервал времени к его
величине.
![]()
Определение:
Ускорение
(или мгновенное ускорение) точки
называется векторная величина, численно
равная первой производной по времени
от скорости рассматриваемой точки или,
что то же самое, вторая производная по
времени от радиус-вектора этой точки:
![]()
Ускорение можно
ввести через предел от среднего ускорения:
![]()
Две введенные
записи ускорения являются эквивалентными.
Разложим вектор
ускорения по базису прямоугольной
декартовой системы координат:
![]()
где ax,
ay,
az
– проекции вектора ускорения на ось.
Координатное
представление модуля вектора ускорения:
![]()
Обратные соотношения:
![]() ;
;

Рассмотрим движение
материальной точки вдоль плоской кривой.
Ускорение всегда направлено внутрь
вогнутости кривой или траектории. Введем
два единичных вектора:
![]() ,
,
который направлен по касательной к
траектории и![]() – направлен перпендикулярно траектории
– направлен перпендикулярно траектории
в центр кривой.
![]() ;
;
![]()
Разложим вектор
ускорения по заданным направлениям.
![]() – касательное
– касательное
ускорение.
Определение:
Касательное
ускорение – векторная величина,
характеризующая быстроту изменения
вектора скорости по модулю.
![]() – векторное
– векторное
представление.
![]() – скалярное
– скалярное
представление.
![]() – нормальное
– нормальное
ускорение.
Определение:
Нормальное
ускорение характеризует быстроту
изменения вектора скорости по направлению
и вычисляется по формуле:
![]() -где R- радиус
-где R- радиус
кривизны траектории в точке М
Если траектория
– окружность, то R
– радиус окружности.
В скалярном
представлении:
![]()
Из свойств
составляющих полное ускорение следует,
что полное ускорение направленно в
сторону вогнутости траектории.
Модуль полного
ускорения равен:
![]()
Аналогично для
вектора полного ускорения:
![]()
| Скорость | |
|---|---|
 |
|
| Размерность | LT−1 |
| Единицы измерения | |
| СИ | м/с |
| СГС | см/с |
| Примечания | |
| вектор |
| Классическая механика |
|---|
| История… |
|
Фундаментальные понятия
|
|
Формулировки
|
|
Разделы
|
|
Учёные
|
| См. также: Портал:Физика |
Ско́рость (стандартное обозначение: 
В русском языке этим же словом называют и скалярную величину — либо модуль вектора скорости, либо алгебраическую скорость точки, то есть проекцию вектора
Термин «скорость» используют в науке и в широком смысле, понимая под ним быстроту изменения какой-либо величины (не обязательно радиус-вектора) в зависимости от другой (чаще подразумеваются изменения во времени, но также в пространстве или любой другой). Так, например, говорят об угловой скорости, скорости изменения температуры, скорости химической реакции, групповой скорости, скорости соединения и т. д. Математически «быстрота изменения» характеризуется производной рассматриваемой величины.
Понятие «скорость» в классической механике[править | править код]
Случай материальной точки[править | править код]
Вектор скорости (мгновенной скорости) материальной точки в каждый момент времени определяется как производная по времени радиус-вектора 

где 



Пройденный точкой путь 


.
Когда алгебраическая скорость точки всё время неотрицательна, путь совпадает с приращением дуговой координаты за время от

Иллюстрация средней и мгновенной скорости
Если алгебраическая скорость точки не меняется с течением времени (или, что то же самое, модуль скорости постоянен), то движение точки называется[5] равномерным (алгебраическое касательное ускорение 
Предположим, что 


В общем же случае аналогичные отношения
и

определяют соответственно среднюю скорость точки[6] и её среднюю алгебраическую скорость; если термином «средняя скорость» пользуются, то о величинах 
Различие между двумя введёнными выше понятиями средней скорости состоит в следующем. Во-первых, 

Случай тела конечных размеров[править | править код]
Для тела протяжённых размеров понятие «скорости» (тела как такового, а не одной из его точек) не может быть определено; исключение составляет случай мгновенно-поступательного движения. Говорят, что абсолютно твёрдое тело совершает мгновенно-поступательное движение, если в данный момент времени скорости всех составляющих его точек равны[7]; тогда можно, разумеется, положить скорость тела равной скорости любой из его точек. Так, например, равны скорости всех точек кабинки колеса обозрения (если, конечно, пренебречь колебаниями кабинки).
В общем же случае скорости точек, образующих твёрдое тело, не равны между собой. Так, например, для катящегося без проскальзывания колеса модули скоростей точек на ободе относительно дороги принимают значения от нуля (в точке касания с дорогой) до удвоенного значения скорости центра колеса (в точке, диаметрально противоположной точке касания). Распределение скоростей точек абсолютно твёрдого тела описывается кинематической формулой Эйлера.
Начальная скорость[править | править код]
Начальная скорость (

Истолкование ![{displaystyle t=[-Delta tldots 0]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/22025d25103c33e678f3cfa5e32d3266f03d9d5b)

Запись скорости в разных системах координат[править | править код]
В декартовых координатах[править | править код]
В прямоугольной декартовой системе координат[9]:

При этом 

Таким образом, компоненты вектора скорости — это скорости изменения соответствующих координат материальной точки[9]:

В цилиндрических координатах[править | править код]
Скорость в полярных координатах
В цилиндрических координатах 



В сферических координатах[править | править код]
В сферических координатах 

Для описания плоского движения иногда используются полярные координаты, которые можно рассматривать как частный случай цилиндрических (c 

Физическая и координатная скорости[править | править код]
В аналитической механике вышеприведённые и другие криволинейные координаты играют роль обобщённых координат; изменение положение тела описывается их зависимостью от времени. Производные от координат тела по времени при этом называются координатными скоростями (они могут иметь размерность отличную от м/c). Физической же скоростью является производная радиус-вектора по времени, а её составляющие в каждом случае задаются всем стоящим перед соответствующим ортом выражением.
Некоторые связанные со скоростью понятия[править | править код]
Ряд величин в классической механике выражается через скорость.
Импульс, или количество движения, — это мера механического движения точки, которая определяется как произведение массы точки на её скорость
.
Импульс является векторной величиной, его направление совпадает с направлением скорости. Для замкнутой системы выполняется закон сохранения импульса.
От скорости также зависит кинетическая энергия механической системы. Для абсолютно твёрдого тела полную кинетическую энергию можно записать в виде суммы кинетической энергии поступательного и вращательного движения[10][11]:

где 



Изменение скорости во времени характеризуется ускорением. Ускорение отражает изменение скорости как по величине (тангенциальное ускорение), так и по направлению (центростремительное ускорение)[12]:

где 
Преобразования Галилея и Лоренца для скорости[править | править код]
В классической механике Ньютона скорости преобразуются при переходе из одной инерциальной системы отсчёта в другую согласно преобразованиям Галилея. Если скорость тела в системе отсчёта 



Для скоростей, близких к скорости света, преобразования Галилея становятся несправедливы. При переходе из системы

в предположении, что скорость 
Скорость в релятивистской механике[править | править код]
Четырёхмерная скорость[править | править код]
Одним из обобщений понятия скорости является четырёхмерная скорость (скорость в релятивистской механике[9]). В специальной теории относительности каждому событию ставится в соответствие точка пространства Минковского, три координаты которого представляют собой декартовы координаты трёхмерного евклидова пространства, а четвёртая ― временну́ю координату 


Четырёхмерный вектор скорости является времениподобным вектором, то есть лежит внутри светового конуса[9].
Существует также понятие четырёхимпульс, временна́я компонента которого равна 

,
где 
Понятие «быстрота»[править | править код]
В релятивистской механике угол между касательной к мировой линии частицы и осью времени в базовой системе отсчёта носит название быстроты (обозначается 

где 

где 
Некоторые скорости[править | править код]
Космические скорости[править | править код]
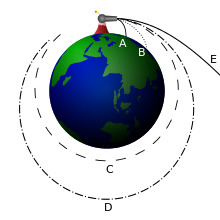
Анализ первой и второй космической скорости по Исааку Ньютону. Снаряды A и B падают на Землю. Снаряд C выходит на круговую орбиту, D — на эллиптическую. Снаряд E улетает в открытый космос
Небесная механика изучает поведение тел Солнечной системы и других небесных тел. Движение искусственных космических тел изучается в астродинамике. При этом рассматривается несколько вариантов движения тел, для каждого из которых необходимо придание определённой скорости. Для вывода спутника на круговую орбиту ему необходимо придать первую космическую скорость (например, искусственный спутник Земли); преодолеть гравитационное притяжение позволит вторая космическая скорость (например, объект запущенный с Земли, вышедший за её орбиту, но находящийся в Солнечной системе); третья космическая скорость нужна чтобы покинуть звёздную систему, преодолев притяжение звезды (например, объект запущенный с Земли, вышедший за её орбиту и за пределы Солнечной системы); четвёртая космическая скорость позволит покинуть галактику.
В небесной механике под орбитальной скоростью понимают скорость вращения тела вокруг барицентра системы.
Скорости распространения волн[править | править код]
Скорость звука[править | править код]
Скорость звука — скорость распространения упругих волн в среде, определяется упругостью и плотностью среды. Скорость звука не является постоянной величиной и зависит от температуры (в газах), от направления распространения волны (в монокристаллах). При заданных внешних условиях обычно не зависит от частоты волны и её амплитуды. В тех случаях, когда это не выполняется и скорость звука зависит от частоты, говорят о дисперсии звука. Впервые измерена Уильямом Дерхамом. Как правило, в газах скорость звука меньше, чем в жидкостях, а в жидкостях скорость звука меньше, чем в твёрдых телах, поэтому при сжижении газа скорость звука возрастает.
Отношение скорости течения в данной точке газового потока к местной скорости распространения звука в движущейся среде называется числом Маха по имени австрийского учёного Эрнста Маха. Упрощённо, скорость, соответствующая 1 Маху при давлении в 1 атм (у земли на уровне моря), будет равна скорости звука в воздухе. Движение аппаратов со скоростью, сравнимой со скоростью звука, сопровождается рядом явлений, которые называются звуковой барьер. Скорости от 1,2 до 5 Махов называются сверхзвуковыми, скорости выше 5 Махов — гиперзвуковыми.
Скорость света[править | править код]
![]()
Время распространения светового луча в масштабной модели Земля-Луна. Для преодоления расстояния от поверхности Земли до поверхности Луны свету требуется 1,255 секунды.
Скорость света в вакууме — абсолютная величина скорости распространения электромагнитных волн в вакууме. Традиционно обозначается латинской буквой «c» (произносится как [це]). Скорость света в вакууме — фундаментальная постоянная, не зависящая от выбора инерциальной системы отсчёта (ИСО). Она относится к фундаментальным физическим постоянным, которые характеризуют не просто отдельные тела или поля, а свойства пространства-времени в целом. По современным представлениям, скорость света в вакууме — предельная скорость движения частиц и распространения взаимодействий.
Наиболее точное измерение скорости света 299 792 458 ± 1,2 м/с на основе эталонного метра было проведено в 1975 году. Теперь ввиду современного определения метра скорость света считается равной точно 299792458 м/с[14].
Скорость гравитации[править | править код]
Скорость гравитации — скорость распространения гравитационных воздействий, возмущений и волн. До сих пор остаётся не определённой экспериментально, но согласно общей теории относительности должна совпадать со скоростью света.
Единицы измерения скорости[править | править код]
Линейная скорость:
- Метр в секунду, (м/с), производная единица системы СИ
- Километр в час, (км/ч)
- узел (морская миля в час)
- Число Маха, 1 Мах равен скорости звука; Max n в n раз быстрее. Как единица, зависящая от конкретных условий, должна дополнительно определяться.
- Скорость света в вакууме (обозначается c)
Угловая скорость:
- Радианы в секунду, принята в системах СИ и СГС. Физическая размерность 1/с.
- Обороты в секунду (в технике)
- градусы в секунду, грады в секунду
Соотношения между единицами скорости[править | править код]
- 1 м/с = 3,6 км/ч
- 1 узел = 1,852 км/ч = 0,514 м/c
- Мах 1 ~ 330 м/c ~ 1200 км/ч (зависит от условий, в которых находится воздух)
- c = 299 792 458 м/c
Исторический очерк[править | править код]
Две стадии движения брошенного тела по теории Авиценны: отрезок АВ — период «насильственного стремления», отрезок ВС — период «естественного стремления» (падение вертикально вниз)
Автолик из Питаны в IV веке до н. э. определил равномерное движение так: «О точке говорится, что она равномерно перемещается, если в равные времена она проходит равные и одинаковые величины». Несмотря на то, что в определении участвовали путь и время, их отношение считалось бессмысленным[15], так как сравнивать можно было только однородные величины и скорость движения являлась чисто качественным, но не количественным понятием[16]. Живший в то же время Аристотель делил движение на «естественное», когда тело стремится занять своё естественное положение, и «насильственное», происходящее под действием силы. В случае «насильственного» движения произведение величины «двигателя» и времени движения равно произведению величины «движимого» и пройденного пути, что соответствует формуле 

начале XIII века. Герард написал трактат «О движении» — первый европейский трактат по кинематике — в котором сформулировал идею определения средней скорости движения тела (при вращении прямая, параллельная оси вращения, движется «одинаково с любой своей точкой», а радиус — «одинаково со своей серединой»)[18].
В 1328 году увидел свет «Трактат о пропорциях или о пропорциях скоростей при движении» Томаса Брадвардина, в котором он нашёл несоответствие в физике Аристотеля и связи скорости с действующими силами. Брадвардин заметил, что по словесной формуле Аристотеля если движущая сила равна сопротивлению, то скорость равна 1, в то время как она должна быть равна 0. Он также представил свою формулу изменения скорости, которая хоть и была не обоснована с физической точки зрения, но представляла собой первую функциональную зависимость скорости от причин движения. Брадвардин называл скорость «количеством движения»[19]. Уильям Хейтсбери, в трактате «О местном движении» ввёл понятие мгновенной скорости. В 1330—1340 годах он и другие ученики Брадвардина доказали так называемое «мертонское правило», которое означает равенство пути при равноускоренном движении и равномерном движении со средней скоростью[20].
Всякая широта движения, униформно приобретаемая или теряемая, соответствует своему среднему градусу, так что столько же в точности будет пройдено благодаря этой приобретаемой широте, сколько и благодаря среднему градусу, если бы тело двигалось всё время с этим средним градусом.
— «Мертонское правило» в формулировке Суайнсхеда[20]
В XIV веке Жан Буридан ввёл понятие импетуса[21], благодаря чему была определена величина изменения скорости — ускорение. Николай Орем, ученик Буридана, предложил считать, что благодаря импетусу ускорение остаётся постоянным (а не скорость, как полагал сам Буридан), предвосхитив, таким образом, второй закон Ньютона[22]. Орем также использовал графическое представление движения. В «Трактате о конфигурации качеств и движения» (1350) он предложил изображать отрезками перпендикулярных прямых количество и качество движения (время и скорость), иными словами, он нарисовал график изменения скорости в зависимости от времени[23].
По мнению Тартальи, только вертикальное падение тела является «естественным» движением, а все остальные — «насильственные», при этом у первого типа скорость постоянно возрастает, а у второго — убывает. Два этих типа движения не могут проистекать одновременно. Тарталья считал, что «насильственные» движения вызваны ударом, результатом которого является «эффект», определяемый скоростью[24]. С критикой работ Аристотеля и Тартальи выступал Бенедетти, который вслед за Оремом пользовался понятиями импетуса и ускорения[25].
В 1609 году в работе «Новая астрономия» Кеплер сформулировал закон площадей, согласно которому секторная скорость планеты (площадь, описываемая отрезком планета — Солнце, за единицу времени) постоянна[26]. В «Началах философии» Декарт сформулировал закон сохранения количества движения, которое в его понимании есть произведение количества материи на скорость[27], при этом Декарт не принимал во внимание тот факт, что количество движения имеет не только величину, но и направление[28]. В дальнейшем понятие «количество движения» развивал Гук, который понимал его как «степень скорости, присущей в определённом количестве вещества»[29]. Гюйгенс, Валлис и Рен добавили к этому определению направление. В таком виде во второй половине XVII века количество движения стало важным понятием в динамике, в частности в работах Ньютона и Лейбница[30]. При этом Ньютон не определял в своих работах понятие скорости[31]. По-видимому, первая попытка явного определения скорости была сделана Валлисом в его трактате «Механика или геометрический трактат о движении» (1669—1671): «Скорость есть свойство движения, отражающееся в сравнении длины и времени; а именно, она определяет, какая длина в какое время проходится»[32].
В XVII веке были заложены основы математического анализа, а именно интегрального и дифференциального исчисления. В отличие от геометрических построений Лейбница, теория «флюксий» Ньютона строится на потребностях механики и имеет в своём основании понятие скорости. В своей теории Ньютон рассматривает переменную величину «флюенту» и её скорость изменения — «флюксию»[33].
Скорости в природе и технике[править | править код]
Основной источник: [34]
| Метры в секунду | |
|---|---|
| Скорость улитки | 
|
| Скорость черепахи | 
|
| Средняя скорость здорового человека (произвольный темп) | 
|
| Рекорд скорости человека в ходьбе на 50 км |  ( ( ) )
|
| Рекорд скорости человека в беге на дистанции 100 м |  ( ( ) )
|
| Скорость гепарда | 
|
| Максимальная скорость полёта сокола | 
|
| Максимальная скорость локомотива на железной дороге | 
|
| Максимальная скорость автомобиля |  [35] [35]
|
| Средняя скорость молекулы азота при температуре 0 °C | 
|
| Максимальная скорость пассажирского реактивного самолёта | 
|
| Скорость движения Луны по орбите вокруг Земли | 
|
| Скорость искусственного спутника Земли | 
|
| Скорость движения Земли по орбите вокруг Солнца | 
|
| Скорость движения Солнца по орбите вокруг центра Галактики | 
|
| Скорость электронов в кинескопе телевизора | 
|
| Скорость движения самых далёких галактик | 
|
| Максимальная скорость протонов в Большом адронном коллайдере | 299 792 455 |
| Скорость частицы Oh-My-God | 299792457,9999999999999985310169558 |
| Скорость безмассовых частиц (фотонов, глюонов, гравитонов) | 299 792 458 |
| Скорость тахионов и сверхбрадионов | > 299792458 |
Скорости движения живых существ[править | править код]
- Сапсан (самое быстрое животное): самая высокая зарегистрированная скорость — 389 км/ч[36];
- Гепард (самое быстрое наземное животное): самая высокая зарегистрированная скорость — 98 км/ч[37];
- Меч-рыба: от 100 до 130 км в час[37];
- Чёрный марлин: самая высокая зарегистрированная скорость — 105 км/ч[36];
- Вилорогая антилопа: самая высокая зарегистрированная скорость — 88,5 км/ч[36];
- Лошадь (американский квортерхорс): 88 км/ч[36];
- Человек: самая высокая зарегистрированная скорость — 44,72 км/ч (Усэйн Болт)[37].
Рекорды скорости транспортных средств[править | править код]
Самый быстрый рукотворный объект — Parker Solar Probe, 150 км/с (относительно Солнца) в 2021 году[38].
Абсолютный рекорд скорости в воздухе был поставлен в 1976 году американским самолетом-разведчиком Lockheed SR-71 Blackbird — 3529,56 км/ч.
Рекорд скорости на земле был установлен в 2003 году на ракетных санях и составил 10 325 км/ч или 2868 м/с (по другим данным, 10 430 км/ч)[39]
Самая высокая скорость на наземном управляемом транспортном средстве была достигнута на реактивном автомобиле Thrust SSC в 1997 году — 1228 км/ч.
Рекорд скорости на воде был поставлен в 1978 году австралийским судном с реактивным газотурбинным двигателем Spirit of Australia[en] — 511,11 км/ч[40]
См. также[править | править код]
- Кинематика
Примечания[править | править код]
- ↑ Маркеев, 1990, с. 15.
- ↑ Старжинский, 1980, с. 154.
- ↑ Маркеев, 1990, с. 15—17.
- ↑ Старжинский, 1980, с. 154—155.
- ↑ Старжинский, 1980, с. 163.
- ↑ Старжинский, 1980, с. 152.
- ↑ Маркеев, 1990, с. 46—47.
- ↑ См. Всегда ли начальная скорость равна нулю? в справочнике «Студворк».
- ↑ 1 2 3 4 5 6 7 8 9 Скорость // Большая советская энциклопедия : [в 30 т.] / гл. ред. А. М. Прохоров. — 3-е изд. — М. : Советская энциклопедия, 1969—1978.
- ↑ Главный редактор А. М. Прохоров. Кинетическая энергия // Физический энциклопедический словарь. — Советская энциклопедия. — М., 1983. Физическая энциклопедия
- ↑ Главный редактор А. М. Прохоров. Вращательное движение // Физический энциклопедический словарь. — Советская энциклопедия. — М., 1983. Физическая энциклопедия
- ↑ Главный редактор А. М. Прохоров. Ускорение // Физический энциклопедический словарь.. — 1983. Физическая энциклопедия
- ↑ Главный редактор А. М. Прохоров. Импульс // Физический энциклопедический словарь. — Советская энциклопедия. — М., 1983. Физическая энциклопедия
- ↑ Определение метра Архивная копия от 26 июня 2013 на Wayback Machine (англ.) Резолюция 1 XVII Генеральной конференции по мерам и весам (1983)
- ↑ 1 2 Яковлев, 2001, с. 21.
- ↑ Яковлев, 2001, с. 34.
- ↑ Яковлев, 2001, с. 29.
- ↑ Яковлев, 2001, с. 31—32.
- ↑ Яковлев, 2001, с. 32—34.
- ↑ 1 2 Яковлев, 2001, с. 35.
- ↑ Яковлев, 2001, с. 35—36.
- ↑ Яковлев, 2001, с. 37.
- ↑ Яковлев, 2001, с. 37—38.
- ↑ Яковлев, 2001, с. 43.
- ↑ Яковлев, 2001, с. 45.
- ↑ Яковлев, 2001, с. 51—52.
- ↑ Яковлев, 2001, с. 59.
- ↑ Яковлев, 2001, с. 68.
- ↑ Яковлев, 2001, с. 77.
- ↑ Яковлев, 2001, с. 91.
- ↑ Яковлев, 2001, с. 96.
- ↑ Яковлев, 2001, с. 72—73.
- ↑ Яковлев, 2001, с. 64—66.
- ↑ Кабардин О.Ф., Орлов В.А., Пономарёва А.В. Факультативный курс физики. 8 класс. — М.: Просвещение, 1985. — Тираж 143 500 экз. — С. 44
- ↑ FIA World Land Speed Records (англ.). Federation Internationale de l’Automobile (10 июня 2012). Дата обращения: 3 декабря 2020. Архивировано 31 марта 2019 года.
- ↑ 1 2 3 4 12 самых быстрых животных в мире. Дата обращения: 17 июня 2022. Архивировано 29 июля 2021 года.
- ↑ 1 2 3 12 самых быстрых животных в мире. Дата обращения: 17 июня 2022. Архивировано 22 сентября 2020 года.
- ↑ Самый быстрый объект, созданный человеком. Зонд Parker Solar Probe развил скорость около 150 км/с. Дата обращения: 17 июня 2022. Архивировано 17 мая 2021 года.
- ↑ Test sets world land speed record. www.af.mil. Дата обращения: 19 апреля 2016.
- ↑ Назло рекордам: почему люди не хотят передвигаться очень быстро
Литература[править | править код]
- Маркеев А. П. Теоретическая механика. — М.: Наука, 1990. — 416 с. — ISBN 5-02-014016-3.
- Старжинский В. М. Теоретическая механика. — М.: Наука, 1980. — 464 с.
- Яковлев В. И. Предыстория аналитической механики. — Ижевск: НИЦ «Регулярная и хаотическая динамика», 2001. — 328 с. — ISBN 5-93972-063-3.

В этой главе…
- Изучаем сложение и вычитание векторов
- Выражаем векторы через координаты
- Разбиваем векторы на компоненты
- Выражаем перемещение, ускорение и скорость в виде векторов
- Определяем изменение скорости под действием тяготения
Довольно трудно добраться в место назначения — пешком ли, на велосипеде ли, на автомобиле ли, на самолете ли — если вы не знаете направления движения. Для успеха путешествия нужно знать не только расстояние, но и направление движения. В главе 3 описывались такие понятия, как перемещение, скорость и ускорение, связанные некоторыми соотношениями, как, например, ( s={}^1!/!_2at^2+v_0t ). С помощью таких соотношений можно получить значения для ускорения, например 27 метров в секунду в квадрате, или для скорости, например 42,7 мили в час. Конечно, полезно знать эти параметры движения, но что можно сказать о направлении движения?
В реальном мире просто необходимо знать направление движения. Именно векторы обозначают такое направление. Очень многие люди ошибочно считают векторы очень сложными объектами, но это совсем не так. В этой главе вы узнаете, насколько легко и просто можно обращаться с ними при решении задач.
Содержание
- Осваиваем векторы
- Определяем направление: основные свойства векторов
- Комбинируем направления: сложение векторов
- Вычисляем разницу расстояний: разность векторов
- Облекаем векторы в числа
- Разбиение вектора на компоненты
- Ищем компоненты вектора по заданной величине и углу
- Находим величину и направление вектора по его компонентам
- Срываем покров с векторов
- Перемещение — тоже вектор
- Скорость — еще один вектор
- Ускорение — еще один вектор
- Упражнение со скоростью: скользим по радуге
Осваиваем векторы
В главе 3 мы работали с простыми числами или измерениями, которые в физике называются величинами. Например, в результате измерения перемещения на 3 метра получена величина перемещения 3 метра. Вектор отличается от величины еще и наличием направления. В повседневной жизни на вопрос о пути понятие “вектор” возникает в виде следующего ответа встречного человека: “Это в 15 милях отсюда”. При этом величина вектора равна 15 милям, а направление вектора определяется взмахом руки. Когда вы навешиваете дверь на петли, то порой слышите совет: “Толкните сильнее влево”. Вот вам еще один вектор! Когда вы объезжаете препятствие на дороге, вам приходится ускоряться и замедляться в разных направлениях. Вот еще несколько векторов!
Векторы встречаются в обыденных ситуациях, например в дорожных указателях, инструкциях по сборке или даже при попытке избежать столкновения со встречным. Поскольку физика стоит за всеми событиями повседневной жизни, то не удивительно, что многие физические концепции, например скорость, ускорение, сила, являются векторами. По этой причине следует поближе познакомиться с векторами, поскольку они присутствуют во всех разделах физики. Вектор — это фундаментальное понятие физики.
Определяем направление: основные свойства векторов
При работе с векторами нужно иметь в виду его направление и величину. Физический параметр без направления, а только с величиной называется скаляром. Если к скаляру добавить направление, то получим вектор.
Визуально в физических задачах вектор отображается в виде стрелки. Действительно, стрелка имеет величину (т.е. длину) и направление (т.е. острие). Взгляните на рис. 4.1. Эта стрелка и есть вектор с началом в тупом конце и с окончанием — в заостренном конце.
Векторы можно использовать для представления силы, ускорения, скорости и других физических параметров. В физике для обозначения векторов используют полужирное начертание, например A. В некоторых книгах векторы обозначают стрелкой над символом, например ( overrightarrow{A} ) . Стрелка обозначает, что у данного параметра A, помимо величины, есть также направление.
Допустим, какой-то умник предложит вам дать пример вектора. Проще простого! Достаточно сказать, что у некого вектора А есть некая величина и некоторое направление. Убежден, что это произведет на умника оглушительное впечатление! Например, скажите, что вектор А направлен под углом 15° к горизонтали и имеет величину 12 метров в секунду. Итак, любопытный умник получит исчерпывающую информацию о векторе А.
На рис. 4.2 показаны два вектора, А и В. Они очень похожи, поскольку обладают одинаковой длиной и направлением. Фактически оба эти вектора равны. Если два вектора равны по величине и направлению, то они считаются равными, т.е. А = В.
Очень скоро читатель станет настоящим экспертом в области векторов. Уже сейчас нам известно, что, когда мы встречаемся с символом А, это значит, что данный параметр обладает величиной и направлением, т.е. является вектором, а два вектора считаются равными, если они имеют одинаковую величину и направление. Но это еще далеко не все. Допустим, чтобы найти нужный вам отель, нужно проехать 20 миль к северу, а потом 20 миль на восток. Так насколько далеко и в каком направлении находится этот отель?
Комбинируем направления: сложение векторов
Два вектора можно сложить и получить результирующий вектор, который является суммой обоих векторов и определяет расстояние и направление до цели.
Допустим, что прохожий говорит вам, что для достижения пункта назначения вам нужно сначала следовать вектору А, а потом вектору В. Так где же находится в этом случае ваш пункт назначения? Сначала нужно проехать по пути, указанному вектором А, а потом по пути, указанному вектором В, как показано на рис. 4.3.
Когда вы доберетесь до конца вектора В, насколько далеко вы будете находиться от исходной точки? Для ответа на этот вопрос начертим еще один вектор С от исходной точки и до конечной точки путешествия, как показано на рис. 4.4.
Новый вектор С представляет собой результат всего путешествия от начала и до самого конца. Все, что нужно сделать, чтобы получить его, так это начертить оба вектора А и В и соединить новым результирующим вектором С.
Сумма векторов достигается за счет того, что начало одного вектора помещается в конец другого, т.е. суммарный вектор проходит от начала одного до конца другого вектора. Иначе говоря, С = А + В. При этом С называется суммой векторов, результатом сложения векторов, или результирующим вектором. Не думайте, что этим ограничиваются возможности комбинирования векторов, ведь векторы можно и вычитать.
Вычисляем разницу расстояний: разность векторов
А что если некто предложит вам векторы С и А, показанные на рис. 4.4, и попросит найти их разность? Их разностью является вектор В, поскольку при сложении векторов А и В получается вектор С. Чтобы объяснить эту мысль, нужно прояснить смысл вычитания вектора А из вектора С: т.е. смысл операции С — А.
Для вычитания двух векторов нужно расположить вместе основания векторов (т.е. концы векторов без остриев), а не совмещать основание одного вектора и острие другого вектора, как при сложении векторов. Затем нужно провести результирующий вектор, который является разностью двух векторов, от острия вычитающего вектора (А) к острию вычитаемого вектора (С). На рис. 4.5 показан пример вычитания вектора А из вектора С (иначе говоря, приведен пример С — А). Как видите, результат такого вычитания равен вектору В, поскольку С = А + В.
Еще один (и для некоторых более простой) способ вычитания векторов заключается в обращении направления второго вектора (т.е. вектора А в разности С — А) и сложении двух векторов: вектора С и обращенного вектора А (т.е. совмещении острия обращенного вектора А с основанием вектора С с последующим проведением результирующего вектора от основания обращенного вектора А к острию вектора С).
Как видите, сложение и вычитание векторов может происходить с одними и теми же векторами в одной задаче. На самом деле с векторами можно выполнять и некоторые другие математические операции. Изложенный выше материал означает, что с векторами можно оперировать так же, как со скалярами, например С = А + В, С — А = В и т.д. Как видите, векторы очень похожи на числа.
Облекаем векторы в числа
Векторы удобно представлять в виде стрелок, но это не всегда самый точный способ работы с ними. Векторы гораздо точнее можно характеризовать числами. Рассмотрим пример сложения векторов А + В, показанных на рис. 4.6.
Предположим, что измерения на рис. 4.6 даны в метрах. Это значит, что вектор А направлен на 1 метр вверх и на 5 метров вправо, а вектор В направлен на 1 метр вправо и на 4 метра вверх. Для получения параметров результирующего вектора С нужно сложить горизонтальные измерения обоих векторов и отдельно сложить вертикальные измерения обоих векторов.
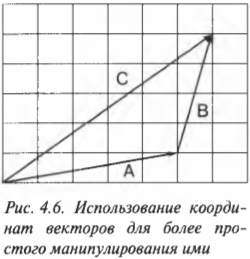
Результирующий вектор С направлен на 6 метров вправо и на 5 метров вверх. Как видите, для получения вертикального измерения вектора С нужно сложить вертикальное измерение вектора А и вертикальное измерение вектора В. А для получения горизонтального измерения вектора С нужно сложить горизонтальное измерение вектора А и горизонтальное измерение вектора В.
Если процедура сложения векторов все еще очень туманна для вас, то тогда можно использовать другую систему обозначений векторов. Поскольку вектор А “простирается” на 5 метров вправо (в положительном направлении оси X) и на 1 метр вверх (в положительном направлении оси Y), то его можно выразить в координатах (х,у), например А = (5;1). Аналогично, поскольку вектор В “простирается” на 1 метр вверх (в положительном направлении оси X) и на 4 метра вправо (в положительном направлении оси Y), то его можно выразить в координатах (х,у), например В = (1;4).
С помощью такой системы обозначений сложение векторов существенно упрощается. Итак, для сложения двух векторов достаточно сложить их координаты по осям X и Y, чтобы получить координаты результирующего вектора по осям X и Y:

Получается, что весь секрет сложения векторов заключается в разбиении каждого вектора на координаты по осям X и Y с последующим их сложением, чтобы соответственно получить координаты X и Y результирующего вектора? Конечно, работа с этими числами для получения координат X и Y результирующего вектора требует некоторых усилий, но они достаточно просты, чтобы с успехом их выполнить.
Допустим, что нужный вам отель находится на расстоянии 20 миль к северу и на расстоянии 20 миль на восток. Как будет выглядеть вектор, направленный из исходной точки к этому отелю? С помощью координатного представления эта задача решается очень легко. Допустим, что положительное направление оси X направлено на восток, а положительное направление оси Y — на север. На первом этапе нужно проехать 20 миль на север, а на втором этапе — 20 миль на восток. В векторном представлении эта задача формулируется следующим образом (восток [X]; север [Y]):
Чтобы сложить эти два вектора, нужно сложить их координаты по соответствующим осям:

Результирующий вектор, который указывает на отель, имеет вид (20; 20).
Рассмотрим еще один пример удачного применения такого представления векторов. Допустим, что вы едете на гоночном автомобиле со скоростью 150 миль в час на восток и видите в зеркало заднего вида приближающегося соперника. Нет проблем, нужно лишь удвоить скорость:

Теперь вы уже не едете, а почти “летите” со скоростью 300 миль в час, но в том же направлении. Итак, в этой задаче демонстрируется процедура умножения вектора на скаляр.
Разбиение вектора на компоненты
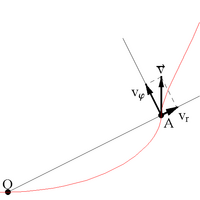
Формулировки задач по физике с использованием векторов не всегда так просты, как предыдущие примеры с манипуляциями векторов. Рассмотрим первый вектор на рис. 4.1 с координатами (4; 1) и сравним его со следующей типичной формулировкой физической задачи: найти время перемещения шара со скоростью 7 метров в секунду по наклонной плоскости с длиной основания 1 м, расположенной под углом 15°. С помощью дальнейшей информации в этом разделе вы научитесь находить компоненты векторов и легко и просто манипулировать ими.
Ищем компоненты вектора по заданной величине и углу
Чтобы определить координаты вектора, нужно научиться разбивать векторы на части, которые называются компонентами. Например для вектора (4; 1) Х-компонентой является число 4, а Y-компонентой — число 1.
Часто в физической задаче задается угол и величина вектора, а его компоненты нужно определить. В предыдущем примере известно, что шар катится со скоростью 7 метров в секунду по наклонной плоскости с длиной основания 1 м, расположенной под углом 15°. Для определения времени перемещения шара от одного конца плоскости к другому нам потребуется разобраться только с Х-компонентой. То есть, задача сводится к определению времени перемещения на расстояние 1 метр вдоль оси X. Для ответа на этот вопрос нужно определить скорость перемещения шара по оси X.
Итак, нам известно, что шар движется со скоростью 7 метров в секунду под углом 15° к горизонтали (т.е. положительного направления оси X). В данной формулировке скорость является вектором ( mathbf{v} ) с величиной 7 метров в секунду и направлением 15° к горизонтали.
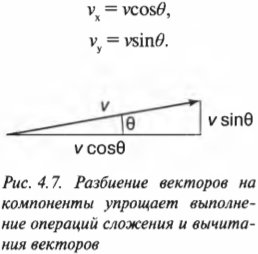
Теперь нам нужно определить Х-компоненту вектора скорости шара, чтобы определить скорость перемещения шара вдоль основания наклонной плоскости. Х-компонента скорости является скаляром (т.е. имеет только значение, а не значение, направление и точку приложения, как вектор) и обозначается как ( v_x ). Аналогично, Y-компонента скорости шара также является скаляром и обозначается как ( v_y ). Итак, вектор скорости можно выразить через его компоненты:

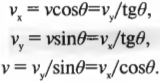
Именно так выражается разложение вектора на компоненты. Так чему же равны компонента ( v_x ) и компонента ( v_y )? Скорость имеет величину ( v ) (7 метров в секунду) и направление ( theta ) (угол 15° к горизонтали). Также нам известна длина основания наклонной плоскости (1,0 метр). На рис. 4.7 показана схема тригонометрических функций (о, Боже, только не это!), которые описывают направление вектора скорости и помогут нам определить его компоненты. Не стоит волноваться: тригонометрические соотношения не так уж и сложны, если известен угол ( theta ), показанный на рис. 4.7. Величина (или модуль) вектора ( mathbf{v} ) равна ( v ) (иногда если вектор обозначается символом ( v ), то его модуль обозначают символом ( overline{v} )), а его компоненты определяются с помощью рис. 4.7:
Рекомендуется хорошенько запомнить указанные выше выражения для компонент вектора, поскольку нам придется довольно часто встречаться с ними в курсе физики.
Теперь можно пойти немного дальше и попробовать связать отдельные стороны треугольника на рис. 4.7. Это можно легко сделать, если вспомнить соотношение для тангенса ( tg,theta=sintheta/costheta ) и воспользоваться соотношениями для компонент скорости:
Зная соотношение ( v_x=vcostheta ), можно найти величину Х-компоненты скорости шара ( v_x=vcostheta ):

Подставляя числа, получим

Итак, теперь мы знаем, что горизонтальная скорость шара равна 6,7 метров в секунду. Поскольку длина основания наклонной плоскости равна 1,0 метра, то это расстояние шар преодолеет за время:

Таким образом, благодаря тому, что мы научились определять компоненту скорости, нам удалось легко найти решение все задачи: шару потребуется 0,15 секунды для перемещения вдоль наклонной плоскости. А чему равна Y-компонента скорости? Это можно очень легко определить, поступая аналогично:

Находим величину и направление вектора по его компонентам
Иногда требуется определить угол наклона вектора, если известны его компоненты. Например, предположим, что вы ищите отель, расположенный на 20 миль к северу и на 20 миль к востоку. Под каким углом нужно двигаться к нему и насколько далеко он находится? Условия этой задачи можно записать с помощью уже известных нам векторных обозначений (см. предыдущий раздел):
После сложения этих двух векторов получим следующий результат:

Результирующий вектор, который указывает на отель, имеет вид (20; 20). Это еще один способ указания вектора с помощью его компонент. Итак, вернемся к прежнему вопросу: под каким углом нужно двигаться к отелю и насколько далеко он находится от текущего положения? Иначе говоря, глядя на рис. 4.8, прежний вопрос теперь звучит так: “Чему равны ( h ) и ( theta )?”
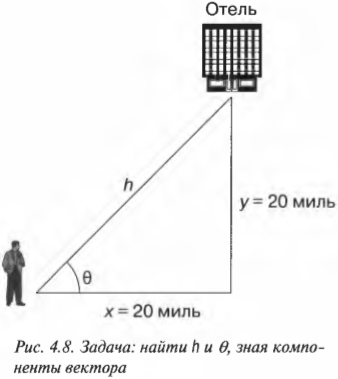
Найти ( h ) не так уж и трудно, пользуясь теоремой Пифагора:
Подставляя численные значения, получим:

Итак, отель находится на расстоянии 28,3 мили. А под каким углом ( theta ) нужно ехать к нему по прямой? Пользуясь основными тригонометрическими соотношениями, можно записать:

Иначе говоря:

Теперь для определения угла нужно использовать функции, обратные синусу и косинусу:
(Строго говоря, обратной синусу функцией является функция “арксинус”, или ( arcsin(x) ), а обратной косинусу — “арккосинус”, или ( arccos(x) ). Обозначения ( sin^{-1}(x) ) и ( cos^{-1}(x) ) часто используются для обозначения функций “арксинус” и “арккосинус”, но их не рекомендуется употреблять, чтобы не путать с функциями ( 1/sin(x) ) и ( 1/cos(x) ). — Примеч. ред.)
Как вычислить значения функций, обратных синусу (( sin^{-1} )) и косинусу (( cos^{-1} ))? Очень просто, ведь в любом инженерном калькуляторе есть кнопки для таких функций! (Например, в программе Калькулятор операционной системы Windows достаточно ввести число, установить флажок параметра Inv (Обратная) и щелкнуть на кнопке sin (Синус). — Примеч. ред.) Достаточно ввести число и нажать соответствующую кнопку, если таковая имеется, например с надписью arcsin (арксинус). В данном случае для угла ( theta ) получим следующий результат вычислений:

Итак, отель находится на расстоянии 28,3 мили и под углом 45°. Вот так, легко и просто мы успешно решили еще одну физическую задачу!
Аналогично, можно определить угол ( theta ) без необходимости промежуточного вычисления ( h ) с помощью других сведений из тригонометрии:
(Строго говоря, обратной тангенсу функцией является функция “арктангенс”, или ( arctg(x) ). Обозначение ( tg^{-1}(x) ) часто используется для обозначения функции “арктангенс”, но его не рекомендуется употреблять, чтобы не путать с функцией ( 1/tg(x) ). — Примеч. ред.)
Срываем покров с векторов
У нас есть два способа описания векторов для решения физических задач. Первый основан на использовании компонент по осям X и Y, а второй — на величине (модуле) и направлении вектора (угол обычно задается в градусах от 0° до 360°, где угол 0° соответствует направлению вдоль положительного направления оси X). Знание правил взаимного преобразования этих двух способов описания имеет очень большое значение, поскольку для операций с векторами удобно использовать компоненты вектора, а в формулировке физических задач обычно задаются величины и углы векторов.
Вот как выглядит формула преобразования двух способов описания векторов:

В этом уравнении предполагается, что ( theta ) — это угол между горизонтальной компонентой и гипотенузой ( h ) (т.е. самой длинной стороной прямоугольного треугольника, расположенного напротив прямого угла), как показано на рис. 4.8. Если угол не известен, то его можно вывести, если запомнить, что сумма всех углов треугольника равна 180°, а в прямоугольном треугольнике, если вычесть величину прямого угла 90°, то сумма остальных двух углов равна 90°.
Если вам известны компоненты (х,у), то его величину и направление можно определить по следующим формулам:

Такого рода преобразования нужно уметь легко выполнять, поскольку они довольно часто встречаются в задачах. На этом месте часто многие приходят в растерянность и не могут освоить дальнейший материал именно потому, что не овладели простыми правилами разложения вектора на компоненты.
Перемещение — тоже вектор
Перемещение ( s ) следует обозначать ( mathbf{s} ), как вектор с определенной величиной и направлением (для обозначения векторов иногда используют стрелку, которая располагается над именем переменной, например ( overrightarrow{s} ) ). В реальном мире очень важно знать не только величину, но и направление перемещения.
Допустим, что сбылись ваши детские мечты и вы стали звездой бейсбола. Вот вам нужно стремглав бежать к первой базе на расстоянии 90 футов по прямой. Но в каком направлении находится первая база? Допустим, что она находится под углом 45°, как показано на рис. 4.9. Тогда вектор вашего перемещения ( mathbf{s} ) имеет величину 90 футов и направление 45°. А какими будут компоненты этого вектора? Это очень просто:

Скорость — еще один вектор
Представьте себе, что вы бежите к первой базе с вектором перемещения s с величиной 90 футов и направлением 45° по отношению к оси X. Тут стоило бы задаться вопросом: “Позволит мне моя скорость опередить игрока на первой базе?” Хороший вопрос. Достанем калькулятор и подсчитаем скорость, если известно, что для достижения первой базы вам требуется 3 секунды. Для определения скорости нужно поделить величину вектора ( mathbf{s} ) на это время:

В этом выражении вектор перемещения делится на скаляр времени. Результатом такого деления является тоже вектор, а именно вектор скорости:

Итак, ваша скорость равна 30 футам в секунду под углом 45° и эта скорость является вектором ( mathbf{v} ). Деление вектора на скаляр дает вектор другой величины, но такого же направления. В данном примере деление вектора перемещения ( mathbf{s} ) на скаляр времени дает в результате вектор ( mathbf{v} ). Он имеет такую же величину, что и величина перемещения, деленная на величину времени, но теперь вектор ( mathbf{v} ) также имеет определенное направление, которое определяется направлением вектора перемещения ( mathbf{s} ). Итак, в данном примере мы научились манипулировать с векторами, как со скалярами в главе 3, и получать вектор в результате этих манипуляций.
Допустим, что после этих вычислений вы пришли к выводу, что такой скорости недостаточно, чтобы опередить соперника. Ну что ж, нужно срочно изменить направление!
Ускорение — еще один вектор
Что произойдет, если в процессе движения внезапно изменить направление? Вы сразу же почувствуете изменение скорости, а значит, ощутите ускорение. Как и скорость, ускорение ( mathbf{a} ) является вектором.
Предположим, что в предыдущем примере нужно изменить скорость Y-компоненты скорости до величины 25 футов в секунду, чтобы избежать встречи с соперником, причем вам известно, что вы способны отклониться от курса на 90° с ускорением 60 футов в секунду в квадрате (в отчаянной попытке увильнуть от соперника). Достаточно ли этого ускорения для изменения скорости за ту долю секунды, которая отделяет вас от встречи с соперником?
Разница конечного ( t_1 ) и начального ( t_0 ) момента времени равняется изменению времени ( Delta t ). Теперь изменение скорости легко найти по следующей формуле:

Теперь попробуем вычислить изменение скорости от исходной скорости на основе данных на рис. 4.10.
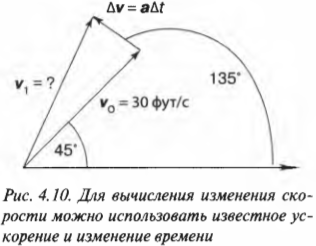
Для поиска конечного значения скорости ( mathbf{v_1} ) нужно выполнить операцию сложения векторов. Это значит, что нужно разложить на компоненты вектор исходной скорости ( mathbf{v_0} ) и вектор изменения скорости ( Delta v ). Вот как выглядят компоненты исходной скорости ( mathbf{v_0} ):

Полпути пройдено. Итак, чему равно изменение скорости ( Delta!mathbf{v} )? Известно, что ( Delta!mathbf{v}=mathbf{a}Deltamathbf{t} ), а ( mathbf{a} ) = 60 футов в секунду2 под углом 90° к прежнему направлению движения, как показано на рис. 4.10. Итак, подсчитаем величину изменения скорости ( Delta!mathbf{v} ) по формуле ( Delta!mathbf{v}=mathbf{a}Deltamathbf{t} ):

Но что можно сказать о направлении ( Delta!mathbf{v} )? Если взглянуть на рис. 4.10, то можно увидеть, что изменение скорости ( Delta!mathbf{v} ) направлено под углом 90° к текущему направлению движения, которое ориентировано под углом 45° к положительному направлению оси X. Следовательно, изменение скорости ( Delta!mathbf{v} ) направлено под углом 135° к положительному направлению оси X. Теперь можно получить выражение для компонент вектора изменения скорости ( Delta!mathbf{v} ):

Теперь остается только выполнить сложение векторов для поиска конечной скорости:

Итак, получен результат ( mathbf{v_1} ) = (17,0 фута в секунду; 25,4 фута в секунду). Y-компонента конечной скорости больше необходимой величины, которая равна 25,0 фута в секунду. После завершения этих вычислений можно спрятать калькулятор и смело выполнить запланированный вираж. Представьте себе, что к изумлению окружающих вам удалось уклониться от соперника и успешно достигнуть места назначения — первой базы (какой крутой поворот вам пришлось для этого выполнить!). Болельщики изумлены и приветствуют вас, а вы, небрежно касаясь кепки кончиками пальцев, отдаете им честь, зная, что все это стало возможным благодаря превосходному знанию физики. После затишья вы украдкой бросаете взгляд на вторую базу: а не закрепить ли успех и попробовать добежать до второй базы? Для этого снова придется достать калькулятор и определить компоненты векторов.
Именно так нужно работать с векторами разных физических параметров: перемещения, скорости и ускорения. Теперь, обладая такими знаниями, можно перевести скалярные уравнения из главы 3 в векторную форму, например, вот так:

Обратите внимание, что полный вектор перемещения — это комбинация перемещения с начальной скоростью и перемещения с постоянным ускорением.
Упражнение со скоростью: скользим по радуге
Хотя сила гравитации подробно описывается в главе 6, но здесь мы рассмотрим результат действия этой силы на небольшом примере с векторами в двух измерениях. Представьте себе, что мячик для игры в гольф движется по горизонтальной вершине скалы со скоростью 1,0 м/с и вскоре сорвется с края скалы на высоте 5 метров от поверхности Земли, как показано на рис. 4.11. Насколько далеко улетит мячик и с какой скоростью он столкнется с поверхностью Земли? В этой задаче прежде всего нужно определить время движения мячика.

Приступим к сбору фактов. Нам известно, что компоненты скорости мячика равны (1; 0), и он находится на высоте 5 метров от поверхности Земли. В процессе падения под действием силы тяготения Земли он движется с постоянным ускорением, ( g ), величина которого равна около 9,8 м/с2.
Итак, как определить, насколько далеко он упадет от края скалы? Один из способов решения этой задачи основан на определении времени движения мячика до столкновения с поверхностью Земли. Поскольку мячик ускоряется только в направлении оси Y (т.е. вертикально вниз), а его компонента скорости по оси X, ( v_x ), не меняется, то пройденное по горизонтали расстояние до столкновения будет равно ( v_xt ), где ( t ) — время движения мячика до столкновения. Сила тяготения ускоряет мячик по вертикали, а значит, перемещение по вертикали (т.е. вдоль оси Y) равно:

В данном случае перемещение по вертикали ( s_y ) = 5 метров, а ускорение ( a_y ) = ( g ) = 9,8 м/с2. Поэтому предыдущее уравнение принимает вид:

Это значит, что время движения мячика до столкновения равно:
Итак, мы вычислили, что мячик будет находиться в полете 1,0 секунды. Отлично, явный прогресс! Поскольку компонента скорости мячика по оси X не изменялась в течение этого времени, то можно легко вычислить расстояние, которое пролетит мячик по горизонтали (т.е. вдоль оси X) за это время:

Подставляем числа и получаем:

Итак, мячик столкнется с поверхностью Земли на расстоянии 1,0 метра по горизонтали.
Теперь можно приступать ко второму вопросу задачи: попробуем определить скорость мячика в момент столкновения с поверхностью Земли. Частично ответ на этот вопрос мы уже знаем, поскольку компонента скорости мячика по оси X не изменялась. Однако по вертикали сила тяготения ускорила мячик по вертикали (т.е. вдоль оси Y), а потому компоненты конечной скорости имеют следующий вид: (1,0; ?). Итак, нам нужно определить величину компоненты скорости мячика по оси Y, обозначенной вопросительным знаком. Воспользуемся следующим соотношением для компоненты скорости по вертикали:
В данном случае начальная скорость ( v_{y0} ) = 0, постоянное ускорение ( a_y=g ) и нужно определить только конечную скорость ( v_{y1} ). Поэтому предыдущее уравнение приобретает следующий вид:

Подставляем числа и получаем:

Ускорение свободного падения, ( g ), также является вектором ( mathbf{g} ). Он направлен к центру Земли, т.е. в отрицательном направлении оси Y, а на поверхности Земли его величина равна около -9,8 м/с2.
Отрицательный знак здесь обозначает направление вниз вектора ( mathbf{g} ), т.е. в отрицательном направлении оси Y. Итак, подставляем обновленное значение ускорения и получаем:

Итак, компоненты конечной скорости мячика равны (1,0; -9,8) м/с. Чтобы найти величину вектора скорости (а не его отдельных компонент) в момент столкновения с поверхностью Земли, выполним следующие вычисления:

Триумфальный финал! Мячик пролетит 1,0 метра по горизонтали и столкнется с поверхностью Земли со скоростью 9,9 м/с. Совсем неплохо для начала.
Глава 4. Едем по указателям
3.8 (75%) 8 votes
