Траектория движения в физике, теория и онлайн калькуляторы
Траектория движения
Определение и основные понятия траектории движения
Во многих задачах интерес представлю не только перемещения материальных точек в пространстве, но и траектории их движения.
Определение
Линию, которую описывает частица при своем движении, называется траекторией движения.
В зависимости от формы траектории механическое движение можно разделить на:
- прямолинейное движение, траекторией движения точки в этом случае является прямая линия;
- и криволинейное перемещение (траектория – кривая линия).
Форма траектории зависит от выбора системы отсчета. В разных системах отсчета траектории могут быть представлены разными линиями, могут быть прямыми и кривыми.
При движении точки с постоянным ускорением, которое описывает уравнение:
[overline{r}left(tright)={overline{r}}_0+{overline{v}}_0t+frac{overline{a}t^2}{2}left(1right),]
(где $overline{r}left(tright)$ – радиус-вектор точки в момент времени $t$; ${overline{v}}_0$ – начальная скорость движения точки; $overline{a}$ – ускорение точки,) траектория движения представляет собой плоскую кривую, что означает все точки этой кривой находятся в одной плоскости. Положение этой плоскости в пространстве задают векторы ускорения и начальной скорости. Ориентацию координатных осей чаще всего выбирают так, чтобы плоскость движения совпадала с одной из координатных плоскостей. В этом случае векторное уравнение (1) можно свести к двум скалярным уравнениям.
Уравнение траектории движения
Рассмотрим свободное движение тела около поверхности Земли. Начало координат разместим в точке бросания тела (рис.1). Оси координат направим так, как изображено на рис.1.
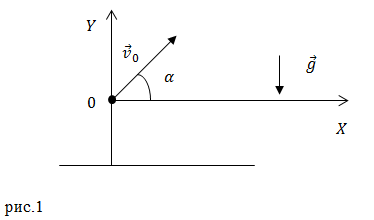
Тогда уравнение движения тела (1) в проекциях на координатные оси декартовой системы координат принимает вид системы из двух уравнений:
[left{ begin{array}{c}
x=v_0t{cos alpha left(2right), } \
y=v_0t{sin alpha }-frac{gt^2}{2}left(3right). end{array}
right.]
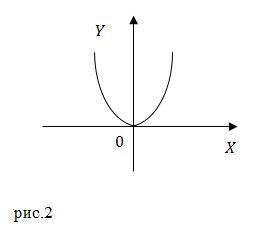
Для того чтобы получить уравнение траектории движения тела ($y=y(x)$) следует исключить время движения тела из уравнений (2) и (3). Выразим из уравнения (2) $t$ и подставим его в выражение (3), получим:
[t=frac{x}{v_0{cos alpha }}; y=v_0frac{x}{v_0{cos alpha }}{sin alpha }-frac{g}{2}{left(frac{x}{v_0{cos alpha }}right)}^2to y=x tg alpha -frac{gx^2}{2v^2_0{cos}^2alpha }left(4right).]
Выражение (4) это уравнение параболы, проходящей через начало координат. Ее верви направлены вниз, так как коэффициент при $x^2$ меньше нуля.
Вершина этой параболы находится в точке с координатами:
[left{ begin{array}{c}
x=frac{v^2_0{sin alpha {cos alpha } }}{g} \
y=frac{v^2_0{sin}^2alpha }{2g} end{array}
right.left(5right).]
Найти координаты вершины траектории можно при помощи известных правил исследования функций на экстремум. Так, положение максимума функции $y(x)$ определяют, приравнивая к нулю первую производную ($frac{dy}{dx}$) от нее по $x$.
Обратимость движения
Из представления о траектории можно конкретизировать смысл обратимости механического движения.
Пусть частица движется в силовом поле таком, что ее ускорение в любой точке обладает определенной величиной, не зависящей от скорости. Как будет двигаться эта частица, если, в какой то точке ее траектории направление скорости заменить противоположным? С точки зрения математики это эквивалентно замене $t $ на $-t$ для всех уравнений. Уравнение траектории время не содержит, получается, что частица будет перемещаться «вспять» по той же самой траектории. При этом отрезки времени между любыми точками траектории будут одинаковы при прямом и обратном движении. Всякой точке траектории ставится в соответствие определенное значение величины скорости независимо от направления движения по данной траектории. Данные свойства наглядны в колебательных движениях маятника.
Все сказанное выше справедливо тогда, когда можно пренебречь любым сопротивлением движению. Обратимость движения существует, когда выполняется закон сохранения механической энергии.
Параметры траектории движения
Положение точек системы отсчета можно определять при помощи разных способов. В соответствии с этими способами описывают и движение точки или тела:
- Координатная форма описания движения. Выбирается система координат, в ней положение точки характеризуют тремя координатами (в трехмерном пространстве). Это могут быть координаты $x_1=x,x_2=y,x_3=z$, в декартовой системе координат. $x_1=rho ,x_2=varphi ,x_3= z$ в цилиндрической системе и т.д. При перемещении точки координаты являются функциями времени. Описать движение точки – это значит указать эти функции:
- При описании движения в векторной форме положение материальной точки задает радиус-вектор ($overline{r}$) по отношению к точке, которую принимают начальной. В этом случае вводят точку (тело) отсчета. При перемещении точки вектор $overline{r}$ постоянно изменяется. Конец этого вектора описывает траекторию. Движение задает выражение:
- Третьим способом описания движения является описание с помощью параметров траектории.
[x_1=x_1left(tright);; x_2=x_2left(tright);; x_3=x_3left(tright)left(6right).]
[overline{r}=overline{r}left(tright)left(7right).]
Путь – это скалярная величина, равная длине траектории.
Если траектория задана, то задачу описания движения сводят к определению закона движения вдоль нее. При этом выбирается начальная точка траектории. Любая другая точка характеризуется расстоянием $s$ по траектории от начальной точки. В таком случае движение описывают выражением:
[s=sleft(tright)left(8right).]
Пусть по окружности радиуса R равномерно перемещается точка. Закон движения точки по окружности в рассматриваемом методе запишем как:
[s=Atleft(9right),]
где $s$ – путь точки по траектории; $t$ – время движения; $A$ – коэффициент пропорциональности. Известными являются окружность и точка начала движения. Отсчет положительных величин $s$ совпадает с направлением перемещения точки по траектории.
Знание траектории движения тела во многих случаях существенно упрощает процесс описания движения тела.
Примеры задач с решением
Пример 1
Задание: Точка движется в плоскости XOY из начала координат со скоростью $overline{v}=Aoverline{i}+Bxoverline{j} , $где $overline{i}$, $overline{j}$ – орты осей X и Y; $A$,B – постоянные величины. Запишите уравнение траектории движения точки ($y(x)$). Изобразите траекторию. textit{}
Решение: Рассмотрим уравнение изменения скорости частицы:
[overline{v}=Aoverline{i}+Bxoverline{j} left(1.1right).]
Из этого уравнения следует, что:
[left{ begin{array}{c}
v_x=A, \
v_y=Bx end{array}
right.left(1.2right).]
Из (1.2) имеем:
[dx=v_xdt=Adtto dt=frac{dx}{A};;dy=v_ydt=Bxdtto dy=Bxfrac{dx}{A} left(1.3right).]
Для получения уравнения траектории следует решить дифференциальное уравнение (1.3):
[y=intlimits^x_0{frac{B}{A}}xdx=frac{B}{2A}x^2.]
Мы получили уравнение параболы, ветви которой направлены вверх. Эта парабола проходит через начало координат. Минимум этой функции находится в точке с координатами:
[left{ begin{array}{c}
x=0 \
y=0. end{array}
right.]
Пример 2
Задание: Движение материальной точки в плоскости описывает система уравнений: $left{ begin{array}{c}
x=At. \
y=At(1+Bt) end{array}
right.$, где $A$ и $B$ – положительные постоянные. Запишите уравнение траектории точки.
Решение: Рассмотрим систему уравнений, которая задана в условии задачи:
[left{ begin{array}{c}
x=At. \
y=Atleft(1+Btright) end{array}
right.left(2.1right).]
Исключим время из уравнений системы. Для этого из первого уравнения системы выразим время, получим:
[t=frac{x}{A}left(2.2right).]
Подставим вместо $t$ правую (2.2) часть во второе уравнение системы (2.1), имеем:
[y=Atleft(1+Btright)=At+ABt^2=Afrac{x}{A}+AB{(frac{x}{A})}^2=x+frac{B}{A}x^2.]
Ответ: $y=x+frac{B}{A}x^2$
Читать дальше: ускорение тела.

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 396 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
Траектория движения тела – это линия, которая была описана материальной точкой при перемещении из одной точки в другую с течением времени.
Виды движений тела
Существуют несколько видов движений и траекторий твердого тела:
- поступательное;
- вращательное, то есть движение по окружности;
- плоское, то есть перемещение по плоскости;
- сферическое, характеризующее движение по поверхности сферы;
- свободное, иначе говоря, произвольное.

Рисунок 1. Определение точки при помощи координат x=x(t), y=y(t), z=z(t) и радиус-вектора r→(t), r0→ является радиус-вектором точки в начальный момент времени
Положение материальной точки в пространстве в любой момент времени может быть задано при помощи закона движения, определенный координатным способом, через зависимость координат от времени x=x(t), y=y(t), z=z(t) или от времени радиус-вектора r→=r→(t), проведенного из начала координат к заданной точке. Это показано на рисунке 1.
Перемещение тела
Перемещение тела s→=∆r12→=r2→-r1→ – направленный отрезок прямой, соединяющий начальную с конечной точкой траектории тела. Значение пройденного пути l равняется длине траектории, пройденной телом за определенный промежуток времени t.

Рисунок 2. Пройденный путь l и вектор перемещения s→ при криволинейном движении тела, a и b – начальная и конечная точки пути, принятые в физике
По рисунку 2 видно, что при движении тела по криволинейной траектории модуль вектора перемещения всегда меньше пройденного пути.
Перемещение принято считать векторной величиной. Этот отрезок имеет направление.
Путь – скалярная величина. Считается числом.
Сумма двух последовательных перемещений из точки 1 в точку 2 и из токи 2 в точку 3 является перемещением из точки 1 в точку 3, как показано на рисунке 3.

Рисунок 3. Сумма двух последовательных перемещений ∆r→13=∆r→12+∆r→23=r→2-r→1+r→3-r→2=r→3-r→1
Когда радиус-вектор материальной точки в определенный момент времени t является r→(t), в момент t+∆t есть r→(t+∆t), тогда ее перемещение ∆r→ за время ∆t равняется ∆r→=r→(t+∆t)-r→(t).
Перемещение ∆r→ считается функцией времени t: ∆r→=∆r→(t).
По условию дан движущийся самолет, представленный на рисунке 4. Определить вид траектории точки М.

Рисунок 4
Решение
Необходимо рассмотреть систему отсчета I, называемую «Самолет» с траекторией движения точки М виде окружности.

Будет задана система отсчета II «Земля» с траекторией движения имеющейся точки М по спирали.

Дана материальная точка, которая совершает движение из А в В. Значение радиуса окружности R=1 м. Произвести нахождение S, ∆r→.

Решение
Во время движения из А в В точка проходит путь, который равен половине окружности, записываемой формулой:
S=πR.
Подставляем числовые значения и получаем:
S=3,14·1 м=3,14 м.
Перемещением ∆r→ в физике считается вектор, соединяющий начальное положение материальной точки с конечным, то есть А с В.
Подставив числовые значения, вычислим:
∆r→=2R=2·1=2 м.
Ответ: S=3,14 м; ∆r→=2 м.

Траектории трёх объектов (угол запуска — 70°, Distance — расстояние, Height — высота), разное лобовое сопротивление
Траекто́рия материа́льной то́чки — линия в пространстве, являющаяся множеством геометрических точек, где можно найти материальную точку, в физической задаче[1]. Вид траектории свободной материальной точки зависит от действующих на точку сил, начальных условий движения и от выбора системы отсчёта, а несвободной — также от наложенных связей[2].
Понятие о траектории имеет смысл и в отрыве от какого-либо реального движения. Но траектория, изображаемая в некоторой системе координат, сама по себе не даёт информации о причинах движения тела по ней, пока не выполнен анализ конфигурации поля действующих на тело сил в той же координатной системе[3].
Способы задания траектории[править | править код]
Вид траектории не зависит от особенностей её прохождения материальной точкой, поэтому для задания траектории могут применяться не физические законы или модели, а средства дифференциальной геометрии.
Так, траектория иногда задаётся функцией/функциями, связывающ-ей/-ими координаты на линии движения точки:
в случае движения по прямой,
для плоского случая,
в объёмном случае.
Но здесь необходимы взаимная однозначность связи координат и отсутствие повторного прохождения материальной точкой каких-либо участков. Например, если тело двигалось по отрезку от 

В общем случае движение материальной точки в кинематике описывается зависимостью радиус-вектора от времени:
.
Такая зависимость представляет траекторию, давая избыток информации — кроме формы прочерчиваемой точкой геометрической линии, имея 
,
где 








В выбранной системе отсчета, кривая, описываемая концом радиус-вектора в пространстве, может быть представлена в виде сопряжённых дуг различной кривизны, находящихся в общем случае в пересекающихся плоскостях. При этом кривизна каждой дуги определяется её радиусом кривизны (не путать с радиус-вектором 
Траектория и смежные понятия[править | править код]
,
- где цифры 1 и 2 маркируют начальное и конечное положения точки, соответственно;
- Перемещение — вектор из начального положения точки в конечное
,
- при этом всегда
;
- Радиус кривизны — радиус дуги окружности, наилучшим образом аппроксимирующей траекторию в заданной точке.
Скорость материальной точки всегда направлена по касательной к дуге, используемой для описания траектории. При этом существует связь между величиной скорости 


.
Не всякое движение с известной скоростью по кривой известного радиуса и найденное по приведённой выше формуле нормальное (центростремительное) ускорение связано с проявлением силы, направленной по нормали к траектории (центростремительной силы). Так, найденное по данным фотографии суточного движения светил ускорение любой из звёзд отнюдь не говорит о существовании вызывающей это ускорение силы, притягивающей её к Полярной звезде как центру вращения.
Траектория и уравнения динамики[править | править код]
Представление траектории как следа, оставляемого движением материальной точки, связывает чисто кинематическое понятие о траектории, как геометрической проблеме, с динамикой движения материальной точки, то есть проблемой определения причин её движения. Фактически, решение уравнений Ньютона (при наличии полного набора исходных данных) даёт траекторию материальной точки.
Движение свободной материальной точки[править | править код]
В соответствии с первым законом Ньютона, иногда называемым законом инерции, должна существовать такая система, в которой свободное тело сохраняет (как вектор) свою скорость. Такая система отсчёта называется инерциальной. Траекторией такого движения является прямая линия, а само движение называется равномерным и прямолинейным.
Движение под действием внешних сил[править | править код]
- в инерциальной системе отсчёта
Если в инерциальной системе скорость 

,
где 

В общем случае тело не бывает свободно в своём движении, и на его положение, а в некоторых случаях и на скорость, налагаются ограничения — связи. Если связи накладывают ограничения только на координаты тела, то такие связи называются геометрическими. Если же они распространяются и на скорости, то они называются кинематическими. Если уравнение связи может быть проинтегрировано во времени, то такая связь называется голономной.
Действие связей на систему движущихся тел описывается силами, называемыми реакциями связей. В таком случае сила, входящая в левую часть выражения закона Ньютона, есть векторная сумма активных (внешних) сил и реакции связей.
Существенно, что в случае голономных связей становится возможным описать движение механических систем в обобщённых координатах, входящих в уравнения Лагранжа. Число этих уравнений зависит лишь от числа степеней свободы системы и не зависит от количества входящих в систему тел, положение которых необходимо определять для полного описания движения.
Если же связи, действующие в системе идеальны, то есть в них не происходит переход энергии движения в другие виды энергии, то при решении уравнений Лагранжа автоматически исключаются все неизвестные реакции связей.
Наконец, если действующие силы принадлежат к классу потенциальных, то при соответствующем обобщении понятий становится возможным использования уравнений Лагранжа не только в механике, но и других областях физики.[5]
Действующие на материальную точку силы в этом понимании однозначно определяют форму траектории её движения (при известных начальных условиях). Обратное утверждение в общем случае несправедливо, поскольку одна и та же траектория может иметь место при различных комбинациях активных сил и реакций связи.
- в неинерциальной системе отсчёта
Если система отсчёта неинерциальна (то есть движется с неким ускорением относительно инерциальной системы отсчёта), то в ней также возможно использование закона Ньютона, однако в левой части необходимо учесть так называемые силы инерции (в том числе, центробежную силу и силу Кориолиса, связанные с вращением неинерциальной системы отсчёта)[4].
Значимость выбора системы отсчёта[править | править код]
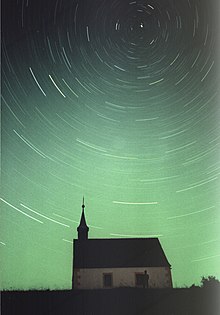
Суточное движение светил в системе отсчёта, связанной с фотоаппаратом в проекции на плоскость рисунка
Уточнение о «привязке» траектории к выбору координатной системы принципиально, так как форма траектории зависит от этого выбора[6]. Качественные и количественные различия траекторий возникают и между инерциальными системами, и если одна или обе системы неинерциальны.
Наблюдаемость траектории[править | править код]
Возможно наблюдение траектории при неподвижности объекта, но при движении системы отсчёта. Так, звёздное небо может послужить хорошей моделью инерциальной и неподвижной системы отсчёта. Однако при длительной экспозиции эти звёзды представляются движущимися по круговым траекториям.
Возможен и противоположный случай, когда тело явно движется, но траектория в проекции на плоскость наблюдения является одной неподвижной точкой. Это, например, случай летящей прямо в глаз наблюдателя пули или уходящего от него поезда.
Модификация формы траектории[править | править код]

Прямолинейное равномерно ускоряющееся движение в одной инерциальной системе в общем случае будет параболическим в другой равномерно двигающейся инерциальной системе отсчёта.
Нередко оказывается, что форма траектории зависит от системы отсчёта, избранной для описания движения материальной точки радикальным образом. Так, прямолинейное равноускоренное движение (скажем, свободое падение) в одной инерциальной системе в общем случае будет параболическим в другой равномерно двигающейся инерциальной системе отсчёта (см. рис.).
В соответствии с принципом относительности Галилея, существует бесконечное множество равноправных инерциальных систем (ИСО), движение которых одна относительно другой не может быть установлено никаким образом путём наблюдения любых процессов и явлений, происходящих только в этих системах. Прямая траектория равномерного движения объекта в одной системе будет выглядеть также прямой в любой другой инерциальной системе, хотя величина и направление скорости будут зависеть от выбора системы, то есть от величины и направления их относительной скорости.
Вместе с тем Принцип Галилея не утверждает, что одно и то же явление, наблюдаемое из двух разных ИСО, будут выглядеть одинаково. Поэтому рисунок предупреждает о двух типичных ошибках, связанных с забвением того, что:
1. Истинно, что любой вектор (в том числе вектор силы) может быть разложен по крайней мере на две составляющие. Но это разложение совершенно произвольно и не значит, что такие компоненты существуют в действительности. Для подтверждения их реальности должна привлекаться дополнительная информация, в любом случае не взятая из анализа формы траектории. Например, по рисунку 2 невозможно определить природу силы F, так же как невозможно утверждать, что она сама является или не является суммой сил разной природы. Можно лишь утверждать, что на изображённом участке она постоянна, и что для формирования наблюдаемой в данной СО криволинейности траектории служит вполне определённая в данной СО центростремительная часть этой силы. Зная лишь траекторию материальной точки в какой-либо инерциальной системе отсчёта и её скорость в каждый момент времени, нельзя определить природу сил, действовавших на неё.
2. Даже в случае наблюдения из ИСО, форма траектории ускоренно движущегося тела будет определяться не только действующими на него силами, но и выбором этой ИСО, никак на эти силы не влияющим. Центростремительная сила, показанная на рисунке 2, получена формально, и её величина непосредственно зависит от выбора ИСО.
Пример для вращающейся системы[править | править код]

Траектории одного и того же движения в неподвижной и вращающейся системах отсчёта. Вверху в инерциальной системе видно, что тело двигается по прямой. Внизу в неинерциальной видно, что тело повернуло в сторону от наблюдателя по кривой.
Представим себе работника театра, передвигающегося в колосниковом пространстве над сценой по отношению к зданию театра равномерно и прямолинейно и несущего над вращающейся сценой дырявое ведро с краской. Он будет оставлять на ней след от падающей краски в форме раскручивающейся спирали (если движется от центра вращения сцены) и закручивающейся — в противоположном случае. В это время его коллега, отвечающий за чистоту вращающейся сцены и на ней находящийся, будет поэтому вынужден нести под первым недырявое ведро, постоянно находясь под первым. И его движение по отношению к зданию также будет равномерным и прямолинейным, хотя по отношению к сцене, которая является неинерциальной системой, его движение будет искривлённым и неравномерным . Более того, для того, чтобы противодействовать сносу в направлении вращения, он должен мышечным усилием преодолевать действие силы Кориолиса, которое не испытывает его верхний коллега над сценой, хотя траектории обоих в инерциальной системе здания театра будут представлять прямые линии.
Но можно себе представить, что задачей рассматривающихся здесь коллег является именно нанесение прямой линии на вращающейся сцене. В этом случае нижний должен потребовать от верхнего движения по кривой, являющейся зеркальным отражением следа от ранее пролитой краски,оставаясь при этом над любой точкой прямой, проходящей в избранном радиальном направлении. Следовательно, прямолинейное движение в неинерциальной системе отсчёта не будет являться таковым для наблюдателя в инерциальной системе.
Более того, равномерное движение тела в одной системе, может быть неравномерным в другой. Так, две капли краски, упавшие в разные моменты времени из дырявого ведра, как в собственной системе отсчёта, так и в системе неподвижного по отношению к зданию нижнего коллеги (на уже прекратившей вращение сцене), будут двигаться по прямой (к центру Земли). Различие будет заключаться в том, что для нижнего наблюдателя это движение будет ускоренным, а для верхнего его коллеги, если он, оступившись, будет падать, двигаясь вместе с любой из капель, расстояние между каплями будет увеличиваться пропорционально первой степени времени, то есть взаимное движение капель и их наблюдателя в его ускоренной системе координат будет равномерным со скоростью 


Поэтому форма траектории и скорость движения по ней тела, рассматриваемая в некоторой системе отсчёта, о которой заранее ничего не известно, не даёт однозначного представления о силах, действующих на тело. Решить вопрос о том, является ли эта система в достаточной степени инерциальной, можно лишь на основе анализа причин возникновения действующих сил.
Таким образом, в неинерциальной системе, во-первых, кривизна траектории и/или непостоянство скорости являются недостаточным аргументом в пользу утверждения о том, что на движущееся по ней тело действуют внешние силы, которые в конечном случае могут быть объяснены гравитационными или электромагнитными полями, а во-вторых, прямолинейность траектории является недостаточным аргументом в пользу утверждения о том, что на движущееся по ней тело не действуют никакие силы.
Бестраекторное движение[править | править код]
Согласно квантовомеханическим представлениям, в отношении движения микрочастицы (электрона или другой) в ограниченном пространстве следует говорить не о траектории 


См. также[править | править код]
- Сложное движение
Примечания[править | править код]
- ↑ Понятие траектории достаточно наглядно может быть проиллюстрировано трассой бобслея (если по условиям задачи можно пренебречь её шириной). И именно трассой, а не самим бобом.
- ↑ Физический энциклопедический словарь, статья Траектория, стр. 764 / гл. ред. А. М. Прохоров — М.: Советская энциклопедия (1984).
- ↑ Так улица, в начале которой висит знак «кирпич» останется в принципе траекторией движения по ней. А поезда разной массы, движущиеся под различными тяговыми усилиями на сцепных крюках локомотивов и потому с разной скоростью, будут двигаться по одной и той же траектории, определяемой формой рельсового пути, налагающего на движение несвободного тела (поезда) конкретные связи, интенсивность которых будет в каждом случае различной
- ↑ 1 2 С. Э. Хайкин. Силы инерции и невесомость. М., 1967 г. Изд-во «Наука». Главная редакция физико-математической литературы.
- ↑ Физический энциклопедический словарь/ Гл. ред. А. М. Прохоров. Ред.кол. Д. М. Алексеев, А. М. Бонч-Бруевич, А. С. Боровик-Романов и др. М.: Сов.энциклопедия, 1983. — 323 с.,ил, 2 л.цв.ил. страница 282.
- ↑ Так, Луна обращается вокруг Земли только в системе отсчёта, связанной с их общим центром гравитации (находится внутри Земного шар). В системе же отсчёта, началом которой является Солнце, Луна обращается вокруг него по той же эллиптической орбите, что и Земля, но с периодическими отклонениями от неё на величину расстояния от Луны до Земли. Никакого взаимного обращения этих небесных тел в этом случае просто нет.
Наличие земного притяжения для объяснения формы траектории Луны в системе координат, связанной с Солнцем, вообще не обязательно. Так, исчезни Земля, Луна могла бы продолжать двигаться, как самостоятельное небесное тело, по той же самой старой траектории, а её периодические возмущения можно было бы тогда в качестве гипотезы объяснить изменением силы тяготения, скажем, за счёт вариации массы Солнца по причине пульсации его светимости (что, кстати, и наблюдается в определённых пределах в действительности).
И обе упомянутые формы траектории истинны и оба объяснения их формы на основании правильно проведённого анализа действующих сил справедливы. Но они исключают друг друга, как исключается возможность одновременного рассмотрения при выборе той или иной системы координат.
- ↑ ВОЛНОВА́Я ФУ́НКЦИЯ : [арх. 10 августа 2022] / Д. В. Гальцов // Великий князь — Восходящий узел орбиты. — М. : Большая российская энциклопедия, 2006. — С. 641-642. — (Большая российская энциклопедия : [в 35 т.] / гл. ред. Ю. С. Осипов ; 2004—2017, т. 5). — ISBN 5-85270-334-6.
В физике есть ещё одна формула измерения траектории (пути): s=4Atv, где A – амплитуда, t – время, v – частота колебаний
Литература[править | править код]
- Ньютон И. Математические начала натуральной философии. Пер. и прим. А. Н. Крылова. М.: Наука, 1989
- Фриш С. А. и Тиморева А. В. Курс общей физики, Учебник для физико-математических и физико-технических факультетов государственных университетов, Том I. М.: ГИТТЛ, 1957
Ссылки[править | править код]
- Траектория и вектор перемещения, раздел учебника по физике[неавторитетный источник?]
Содержание:
Координатный способ определения движения точки:
При координатном способе определения движения точки должны быть даны уравнения движения, т. е. заданы координаты точки как функции времени:

Задание движения точки в прямоугольных координатах
Как известно из курса аналитической геометрии, положение точки M в пространстве может быть определено положением ее проекций P, Q и R на три взаимно перпендикулярные оси (рис. 84), называемые осями координат.
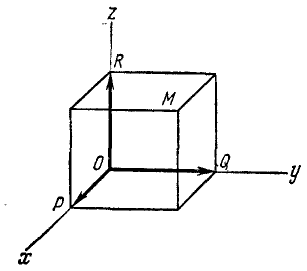
Рис. 84
Положение точки P на оси Ox вполне определяют абсциссой х. Совершенно так же положение точек Q и R определяют ординатой у и аппликатой z.
Если точка M движется относительно осей xOyz, то проекции Р, Q и R перемещаются по осям и координаты точки M изменяются.
Для определения движения точки M нужно знать ее координаты для каждого мгновения, выразить их в функциях времени.
x = x(t), (58′)
y = y(t), (58″)
z = z(t), (58″‘)
Эти функции непрерывны, так как точка не может из одного положения перейти в другое, минуя промежуточные. Они должны быть однозначны, так как точка занимает в пространстве в каждое мгновение только одно положение.
Соотношения (58) называют кинематическими уравнениями движения точки в прямоугольных координатах, а способ определения движения точки посредством соотношений (58) называют координатным способом определения движения точки. Это название неточно, потому что, кроме прямолинейных прямоугольных координат, существует множество других координатных систем.
Если траектория точки лежит в одной плоскости, то движение точки определяют двумя уравнениями в системе координат xОy: x=x(t), y=y(t).
Следовательно, при координатном способе задания движения точки в пространстве нужно задать ее три координаты, а на плоскости—две координаты как функции времени. Если точка движется прямолинейно, то, приняв прямую, по которой она движется, за ось абсцисс, мы определим движение точки одним уравнением
x = x(t).
Если движение точки задано в координатной форме, то для определения ее траектории надо из уравнений движения исключить время
Уравнение траектории
Можно определить траекторию точки, если в уравнениях движения (58) давать аргументу t различные значения и, вычислив соответствующие значения функций, отмечать положения точки по ее координатам. Следовательно. кинематические уравнения движения точки (58) можно
рассматривать как уравнения ее траектории в параметрической форме, а время — как независимый переменный параметр.
Однако более удобно получить уравнение траектории, исключив время из уравнений (58). В самом деле, траекторией называют геометрическое место всех положений движущейся точки, но в геометрии нет понятия времени, а поэтому для получения уравнения траектории нужно из кинематических уравнений движения (58) исключить время t. Если точка движется в плоскости, то, исключив время из уравнений (58′) и (58″), мы получим соотношение, связывающее х и у:
f(x, у) = 0. (59)
Это уравнение плоской кривой—траектории точки. Если же движение задано тремя уравнениями (58), то, исключив время, получим два уравнения между тремя координатами:
 (59/)
(59/)
выражающие, как известно из аналитической геометрии, кривую (траекторию) в пространстве. Точнее говоря, уравнения (59) или (59′) выражают кривую, которая полностью или в некоторой своей части является геометрическим местом всех положений движущейся точки.
Иногда бывает нужно выразить в естественной форме движение точки, заданное в прямоугольных координатах уравнениями (58), и, кроме уравнения траектории, дать также уравнение (51) движения точки по траектории. Чтобы его получить, надо продифференцировать уравнения (58) и полученные дифференциалы координат точки подставить в известную из курса высшей математики формулу, выражающую абсолютную величину элемента дуги:
 (60)
(60)
Проинтегрировав (60), мы получим уравнение (51), выражающее длину дуги s как функцию времени, или, что то же, закон движения точки по траектории.
Задача №1
По заданным уравнениям движения точки в координатной форме найти уравнение траектории и уравнение движения по траектории:
1) х = 5 cos 2t, y = 3+5sin 2t;
2) x=21,2 sin2 t, у = 21,2 cos 2t.
В обоих примерах за единицу длины принят сантиметр, за единицу времени — секунда.
Решение. Чтобы определить уравнение траектории по уравнениям движения, перенесем во втором из заданных уравнений 3 влево, возведем оба уравнения в квадрат и, сложив, получим
x2 + (y-3)2 = 25.
Это уравнение окружности с центром в точке: x = 0, y = +3.
Чтобы получить закон движения, продифференцируем заданные уравнения: dx=—10 sin 2t dt, dy = 10 cos 2t dt.
Возводя в квадрат, складывая, извлекая квадратный корень и интегрируя, находим закон движения по траектории:
s=10t + C, где C = s0.
2) Исключим время из уравнений движения во втором примере:
x+y = 21,2.
Это уравнение первого порядка относительно х и у, следовательно, траектория-прямая линия. Прямая отсекает на положительных направлениях осей координат отрезки по 21,2 см. Однако не вся прямая служит траекторией точки: из заданных уравнений видно, что х и у должны быть всегда положительны и не могут быть больше 21,2 см каждый, поэтому траекторией точки является лишь отрезок прямой x+y = 21,2, лежащей в первом квадранте (рис. 85).
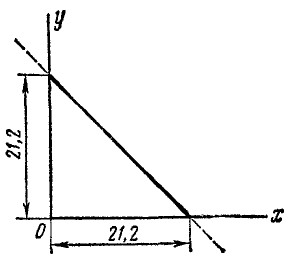
Рис. 85
На этом примере мы видим, что траекторией точки иногда является лишь часть линии, выражаемой уравнением траектории.
Продифференцируем уравнения движения:
dx = 21,2 ∙ 2 sin t cos t dt,
dy = 21,2 ∙ 2 sin t cos t dt.
Теперь no формуле (60) нетрудно найти элемент дуги траектории:

ля получения уравнения (51) движения точки по траектории остается лишь проинтегрировать найденное выражение. Интегрируем и подставляем начальные условия (при t= 0, s0 = 0):

Ответ. Уравнения траекторий x2+(y-3)2= 25 и x+y=21,2; уравнения движения по траектории s=10t+s0 и s = 30 sin 2t.
Задача №2
Движение точки задано уравнениями:
х = x’ cos φ (t)—y’ sin φ (t),
y = x’ sin φ (t) + y’ cos φ (t),
где х’ и у’ — некоторые постоянные величины, a φ(t)— любая функция времени. Определить траекторию точки.
Решение. Возведем каждое из уравнений в квадрат, а затем сложим их:
x2 + y2 = χ‘2 + y‘2.
По условию, х’ и у’ — постоянные. Обозначая сумму их квадратов через r2, получим
x2 + y2 = r2.
Ответ. Окружность с центром в начале координат радиуса  .
.
Задача №3
Поезд длиной l м сначала идет по горизонтальному пути (рис. 86, а), а потом поднимается в гору под углом 2α к горизонту. Считая поезд однородной лентой, найти траекторию его центра тяжести.
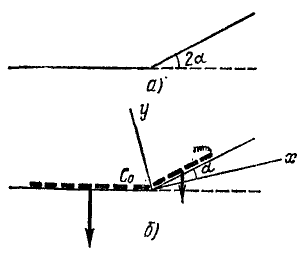
Рис. 86
Решение. Для решения задачи нужно определить координаты центра тяжести поезда, найти уравнения движения центра тяжести и исключить из них время.
Направим оси координат по внутренней и внешней равиоделяшнм угла 2α (рис. 86, б). Траектория центра тяжести поезда не зависит от скорости поезда. Для простоты подсчетов предположим, что он идет равномерно со скоростью υ м/сек и в начальное мгновение t=0 подошел к горе.
Тогда за время t сек на гору поднимется υt м состава поезда и останется на горизонтальном пути l — υt м. Будем считать, что единица длины поезда весит γ.
Применяя формулы (48), найдем координаты центра тяжести поезда:



Координаты центра тяжести представлены здесь как функции времени, следовательно, полученные соотношения являются уравнениями движения центра тяжести поезда. Определяя t (или υt) из первого уравнения и подставляя во второе, найдем уравнение траектории:

Ответ. Парабола.
Задача №4
Мостовой кран движется вдоль цеха согласно уравнению х = t; по крану катится в поперечном направлении тележка согласно уравнению у = 1,5t (х и у—в м, t — в сек). Цепь укорачивается со скоростью t>=0,5. Определить траекторию центра тяжести груза (в начальном положении центр тяжести груза находился в горизонтальной плоскости хОу, ось Oz направлена вертикально вверх).
Решение. В условии задачи даны лишь два уравнения движения и вертикальная скорость груза:

откуда dz = 0,5dt, и легко получаем третье уравнение:
z = 0,5t
Определив t из первого уравнения, подставим во второе и в третье:
y= 1,5x, z = 0,5x
Координаты груза должны удовлетворять одновременно обоим уравнениям, т. е. траектория лежит одновременно в обеих плоскостях и является линией их пересечения.
Ответ. Прямая.
Алгебраическая величина скорости проекции точки на координатную ось равна первой производной от текущей координаты по времени:

Алгебраическая величина скорости проекции точки на ось
Пусть движение точки M определяется тремя уравнениями:
x =x(t), (58′)
y = y(t), (58″)
z = z(t). (58″‘)
По мере движения точки M в пространстве ее проекции P, Q и R движутся по своим прямолинейным траекториям, т. е. по осям координат, и их движения вполне соответствуют движению точки М.
Так, координата (абсцисса) точки P всегда равна абсциссе точки М, а координаты точек QnR всегда равны ординате и аппликате точки М. Следовательно, при движении точки M в пространстве согласно уравнениям (58) точка P движется по оси Ox согласно уравнению (58′), а точки Q и R— соответственно по осям Oy и Oz согласно уравнениям (58″) и (58″‘).
Таким образом, движение точки M в пространстве можно разложить на три прямолинейных движения ее проекций P, Q и R.
Определим скорость υp точки P при движении этой точки по ее прямолинейной траектории Ох, иными словами, определим скорость проекции точки M на ось Ох.
Алгебраическая величина скорости выражается по формуле (53), причем дифференциалом расстояния точки P является дифференциал абсциссы х, а поэтому
 (61)
(61)
Следовательно, алгебраическая величина скорости проекции P точки M на координатную ось равна первой производной от текущей координаты х по времени t. Она положительна, если точка P движется в положительном направлении оси Ох, и отрицательна, если точка P движется в отрицательном направлении.
Аналогично получаем алгебраические скорости проекций Q и R на ось Oy и на ось Oz:
 (61″)
(61″)
 (61″‘)
(61″‘)
Чтобы получить векторы скоростей проекций, надо умножить величины (61) на единичные векторы:
 (61)
(61)
Алгебраическая величина скорости проекции точки на ось равна проекции скорости той же точки на туже ось:
Скорость проекции и проекция скорости
Пусть точка М за бесконечно малый отрезок времени dt передвинулась по своей траектории на элемент дуги ds, абсолютную величину которого выразим формулой (60):

где dx, dy и dz — проекции элемента дуги на оси координат, или, Что то же, элементарные приращения координат точки М.
На рис. 87 эти элементы условно изображены конечными отрезками. Как видно из чертежа, косинусы углов, составляемых элементарным перемещением (а следовательно, и скоростью точки), с осями х, у и z соответственно равны
 (62)
(62)
Величина скорости точки M может быть определена по (53):

Чтобы определить проекцию скорости  на какую-либо ось, надо умножить абсолютную величину скорости на косинус угла между направлением скорости и направлением этой оси. Таким образом, для проекций скорости точки M на оси координат имеем:
на какую-либо ось, надо умножить абсолютную величину скорости на косинус угла между направлением скорости и направлением этой оси. Таким образом, для проекций скорости точки M на оси координат имеем:
 (63′)
(63′)
 (63″)
(63″)
 (63″‘)
(63″‘)
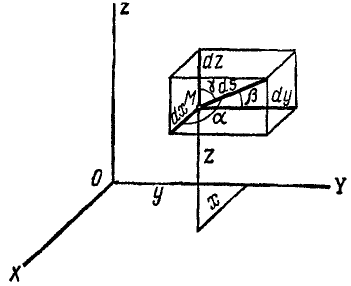
Рис. 87
Равенства (63) словами нужно читать так: проекция скорости точки на ось равна алгебраической скорости проекции точки на ту же ось.
Задача №5
Доказать, что проекция  скорости
скорости  точки M (х, у, z) иа плоскость хОу равняется скорости
точки M (х, у, z) иа плоскость хОу равняется скорости  , с которой движется по плоскости проекция M1 (х, у, О) точки M на ту же плоскость.
, с которой движется по плоскости проекция M1 (х, у, О) точки M на ту же плоскость.
Решение. Скорость точки M составляет с осью Oz угол γυ, следовательно, угол, составляемый ею с плоскостью хОу, равен 90° — yυ п косинус этого угла равен sinγυ. Поэтому модуль проекции скорости точки M на плоскость хОу
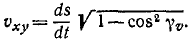
Подводя  под радикал и выражая cosγυ, по формуле (62), мы убедимся, что проекция скорости на плоскость равна по величине скорости проекции:
под радикал и выражая cosγυ, по формуле (62), мы убедимся, что проекция скорости на плоскость равна по величине скорости проекции:

Направления векторов  и
и  тоже совпадают, так как направляющие косинусы их одинаковы. Теорема доказана.
тоже совпадают, так как направляющие косинусы их одинаковы. Теорема доказана.
Модуль скорости точки равен квадратному корню из суммы квадратов проекций скорости на оси координат:
Модуль скорости. Возведем в квадрат каждое из равенств:
 (63)
(63)
и сложим их:

Сумма квадратов направляющих косинусов равна единице и

или
 (64)
(64)
Перед радикалом взят положительный знак, так как величина скорости (ее модуль) всегда положительна. В этом ее существенное отличие от алгебраической величины скорости (53), характеризующей скорость точки при движении по заданной траектории и имеющей знак « + » или «—» в зависимости от направления движения. Величину (64) иногда называют полной скоростью.
Направление скорости можно определить по направляющим косинусам скорости:

Направляющие косинусы скорости
Равенство (64) позволяет определить модуль скорости точки, движение которой задано уравнениями (58). Направление скорости определяется по косинусам углов, составляемых положительными направлениями осей координат с направлением скорости. Значения этих косинусов, называемых направляющими косинусами скорости, мы получим из уравнений (63):
 (62′)
(62′)
где  ,
,  и
и  — производные от х, у и z по t.
— производные от х, у и z по t.
Если точка движется в плоскости хОу, то γυ = 90o, cosγυ = 0 и cos αυ = sin βυ.
Задача №6
Уравнения движения суть

Определить траекторию и скорость.
Решение. Из уравнений движения следует, что х и у всегда больше нуля.
Для определения уравнения траектории возведем каждое из уравнений движения в квадрат и составим разность
x2 – у2 = a2
Для определения скорости найдем сначала ее проекции:


а затем уже и полную скорость.
Ответ. Траектория — ветвь гиперболы x2 – у2 = a2 — расположена в области положительных значений х; скорость  .
.
Задача №7
Движение точки задано уравнениями

причем ось Ox горизонтальна, ось Oy направлена по вертикали вверх, υ0, g и  —величины постоянные. Найти траекторию точки, координаты наивысшего ее положения, проекции скорости на координатные оси в тот момент, когда точка находится на оси Ох.
—величины постоянные. Найти траекторию точки, координаты наивысшего ее положения, проекции скорости на координатные оси в тот момент, когда точка находится на оси Ох.
Решение. Уравнения описывают движение тела, брошенного со скоростью υ0 под углом α0 к горизонту (к оси Ох).
Чтобы найти уравнение траектории, определим время из первого уравнения и подставим найденное значение во второе; получим
уравнение параболы, проходящей через начало координат (рис. 88).
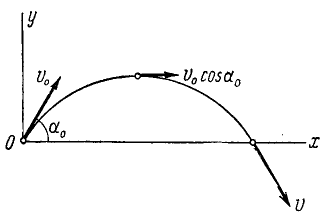
Рис. 88
Чтобы определить координаты наивысшего положения, мы можем применить известные из дифференциального исчисления правила нахождения максимума функции, т. е. взять производную  , приравняв ее нулю, определить значение х и, подставив его в уравнение траектории, определить соответствующее значение у, убедившись при этом, что вторая производная
, приравняв ее нулю, определить значение х и, подставив его в уравнение траектории, определить соответствующее значение у, убедившись при этом, что вторая производная  . Однако мы найдем координаты наивысшего положения точки другим методом, для чего, продифференцировав по времени уравнения движения точки, найдем проекции ее скорости:
. Однако мы найдем координаты наивысшего положения точки другим методом, для чего, продифференцировав по времени уравнения движения точки, найдем проекции ее скорости:

Первое из этих уравнений показывает, что проекция скорости на горизонтальную ось постоянна и равна проекции начальной скорости.
Исследование второго уравнения убеждает, что проекция скорости на вертикальную ось в начальное мгновение положительна и равна υ0 sin α0; затем, по мере увеличения t, проекция υy уменьшается, оставаясь положительной до мгновения  , когда υy обращается в нуль, после чего υy становится отрицательной, возрастая по абсолютной величине с течением времени t.
, когда υy обращается в нуль, после чего υy становится отрицательной, возрастая по абсолютной величине с течением времени t.
Таким образом, точка движется вправо, сначала поднимаясь, затем опускаясь. Мгновение  , при котором точка кончила подниматься, но еще не начала опускаться, соответствует максимальному подъему точки. В это мгновение скорость горизонтальна и
, при котором точка кончила подниматься, но еще не начала опускаться, соответствует максимальному подъему точки. В это мгновение скорость горизонтальна и  . Подставляя найденное значение t в уравнения движения, найдем координаты наивысшей точки траектории:
. Подставляя найденное значение t в уравнения движения, найдем координаты наивысшей точки траектории:

Определим проекции скорости в мгновение, когда точка находится на оси Ох. В это мгновение ордината точки равна нулю. Приравняем пулю второе из уравнений движения:

Точка находится на оси Ox два раза: при t=0 при 
Первое значение t соответствует началу движения, второе —падению точки на ось Ох. Второе значение равно времени всего полета, и оно вдвое больше полученного нами ранее времени наивысшего подъема: время падения равно времени подъема.
Подставляя значение t=0 в уравнения, определяющие проекции скорости, найдем проекции скорости в начальное мгновение:
υx = + υ0 cos α0, υy = + υ0 sin α0.
Подставляя второе из найденных значений t, найдем скорости в момент падения:
υx = + υ0 cos α0, υy = – υ0 sin α0.
Ответ: 1) Парабола 
2) 
3) υx = υ0 cos α0, υy =  υ0 sin α0.
υ0 sin α0.
причем верхний знак соответствует началу движения, а нижний—концу.
Задача №8
По осям координат (рис. 89) скользят две муфты A и B, соединенные стержнем AB длиной l. Скорость В равна υB.
При каком положении муфт скорость муфты А вдвое больше υB?
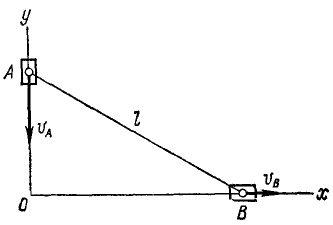
Рис. 89
Решение. Координата точки А связана с координатой точки В соотношением
Считая х и у функциями времени и продифференцировав это равенство по времени, найдем зависимость между скоростями обеих точек:
Но  и по условию надо, чтобы величина
и по условию надо, чтобы величина  была равна 2υB, т. е.
была равна 2υB, т. е.
откуда после алгебраических преобразований получаем ответ.
Ответ:  (см. задачи № 57 и 89, где даны другие решения).
(см. задачи № 57 и 89, где даны другие решения).
Проекция ускорения точки на координатную ось равна первой производной по времени от проекции скорости на ту же ось или второй производной от текущей координаты по времени:

Ускорение проекции и проекция ускорения
Ускорение характеризует изменение скорости точки в данное мгновение. Оно выражается пределом отношения изменения вектора скорости к соответствующему промежутку времени при стремлении этого промежутка времени к нулю.
Для того чтобы определить ускорение точки M при ее движении в пространстве, рассмотрим сначала движение по оси Ox точки Р, являющейся проекцией точки M на эту ось.
Пусть в некоторое мгновение t алгебраическая величина скорости точки P была υх, а в мгновение tl = t + Δt стала υx+∆υx. Тогда ускорение точки P по величине и по знаку выразится пределом
Если знаки υx и ap одинаковы, то движение точки P ускоренное, а если различны, то замедленное.
Аналогично выразятся ускорения проекций Q и R точки M на другие координатные оси:
Проекции υx, υy и υz сами являются производными по времени от координат точки, поэтому ускорения проекций можно выразить вторыми производными по времени от координат точки. Эти равенства характеризуют не только величины, но и знаки ускорений проекций. Иными словами, они выражают изменение алгебраических скоростей проекций P, Q и R в мгновение t.
Только что доказанная теорема о равенстве алгебраической скорости проекции точки на ось и проекции скорости той же точки на ту же ось справедлива для любого момента времени. Следовательно, эта теорема относится не только к скорости, но и к ее изменению в любое мгновение, т. е. к ускорению. Это значит, что написанные выше равенства выражают также проекции ax, ау и аz ускорения а точки M на оси координат Ox, Oy и Oz:
 (65)
(65)
где cosαa, cosβa и cosγa—направляющие косинусы ускорения.
Можно рассматривать эти величины (65) как векторы, направленные по осям координат:
 (65′)
(65′)
Модуль ускорения точки равен квадратному корню из суммы квадратов проекций ускорения на оси координат:
Величина ускорения при координатном способе задания движения точки
Возведем в квадрат каждое из равенств:
и затем сложим их:

откуда
 (66)
(66)
Перед радикалом взят знак плюс, так как модуль вектора—величина положительная. Ускорение точки в отличие от проекций ускорения на оси координат или на другие направления обычно называют полным ускорением. Поэтому равенство (66) можно прочитать так: величина полного ускорения точки равна квадратному корню из суммы квадратов его проекций на оси координат.
Направление ускорения можно определить по направляющим косинусам ускорения:
 ,
, 
Направляющие косинусы ускорения
Направление ускорения определяют по косинусам углов, составляемых положительными направлениями осей координат с вектором ускорения. Формулы направляющих косинусов получаем из уравнений (65):
 (67′)
(67′)
 (67”)
(67”)
 (67”’)
(67”’)
Для определения направления ускорения в каждом конкретном случае надо сначала найти ускорение проекций по (65), для чего необходимо дважды продифференцировать уравнения движения (58), затем найти величину ускорения по (66), а потом определить направляющие косинусы ускорения по (67).
Направление ускорения обычно не совпадает с направлением скорости, и направляющие косинусы (67) ускорения только при прямолинейном ускоренном движении точки постоянно равны направляющим косинусам (62) скорости.
Если точка движется в плоскости хОу, то γa = 90o, cosγa = 0, cosα0 = sin βa.
Задача №9
Точка M движется в системе координат хОу согласно уравнениям х= r cos πt, y=r sinπt, где х и у—в см, a t — в сек. Найти уравнение траектории точки М, ее скорость, направляющие косинусы скорости, ускорение, направляющие косинусы ускорения. Для значений времени t=0; 0,25; 0,5; 0,75, …. 2 сек дать чертежи положений точки M, вектора скорости и вектора ускорения.
Решение. Из уравнения движения видно, что координаты точки M являются проекциями на соответствующие оси радиуса-вектора r, составляющего с осью абсцисс угол πt:

Для определения траектории точки исключаем время из уравнений движения. Получаем уравнение окружности
x2 + y2 = r2
Найдем теперь проекции скорости на оси координат, для чего продифференцируем по времени уравнения движения:
откуда по (64) получаем модуль скорости
Величина скорости точки M постоянна.
Направляющие косинусы скорости определим по формуле (62′):
Эти соотношения показывают, что направление скорости непрерывно меняется и что скорость перпендикулярна радиусу-вектору, проведенному из центра О в точку М.
Ускорение точки M найдем по его проекциям, для чего продифференцируем выражения, полученные для проекций скорости:

откуда по (66) получаем величину ускорения

Ускорение характеризует быстроту изменения вектора скорости не только по величине, но и по направлению, поэтому, несмотря на постоянство модуля скорости точки М, ускорение этой точки не равно нулю. Как видно из полученного
Рис. 90
равенства, величина полного ускорения постоянна. Направление ускорения определим по направляющим косинусам согласно (67):

Направление ускорения точки M противоположно направлению радиуса-вектора.
Положения точки M в различные мгновения показаны на рис. 90, а, векторы скорости — на рис. 90,6 и векторы ускорения — на рис. 90, в.
Ответ. Точка M движется по окружности радиуса r против часовой стрелки с постоянной по величине скоростью υ = rπ и с постоянным по величине ускорением a = rπ2.
Задача №10
Снаряд выбрасывается из орудия с начальной скоростью υ=1600 м/сек под утлом α0 = 55o к горизонту. Определить теоретическую дальность и высоту обстрела, учитывая, что ускорение свободно падающих тел g = 9,81 м/сек2.
Решение. Сначала составим уравнения движения снаряда в координатной форме, направив оси, как показано на чертеже (см. рис. 88), для этого определим проекции ускорения:

Разделив переменные, интегрируем:
υх= С1, υy = – gt + С2
Подставляя вместо переменных величин их начальные значения, увидим, что C1 и C2 равны проекциям начальной скорости:
1600 cos 55o = C1, 1600 sin 55o = – gt + C2.
Подставим их в уравнения, полученные для проекций скорости:
Разделяя переменные и интегрируя, найдем


При t = 0 координаты снаряда были: х =0, у = 0. Подставляя эти данные, найдем, что C3 = O и C4 = O. Значения cos 55° и sin 55° найдем в тригонометрических таблицах. Уравнения движения снаряда примут вид:

Далее поступим, как при решении задачи № 42: приравняв вертикальную скорость нулю, найдем время подъема снаряда (t= 133,7 сек); подставляя это значение t в уравнение движения по оси Оу, найдем теоретическую высоту обстрела (h = 87 636 м); удваивая время /, найдем время полета снаряда (t = 267,4 сек); подставляя это значение- в уравнение движения по оси Ох, найдем теоретическую дальность обстрела (l = 245 393 м).
Ответ. l = 245 км; h = 87,5κм.
- Касательное и нормальное ускорения точки
- Основные законы динамики
- Колебания материальной точки
- Количество движения
- Пара сил в теоретической механике
- Приведение системы сил к данной точке
- Система сил на плоскости
- Естественный и векторный способы определения движения точки
