Время на прочтение
3 мин
Количество просмотров 9.6K
Немного теории.
Для начала разберемся с тем, что такое лошадиные силы и устроим небольшой экскурс в школьную физику.
1 л.с. – это мощность, затрачиваемая при вертикальном подъёме груза массой 75 кг со скоростью 1 м/с.
![]()
Как известно, мощность показывает, какую работу совершает тело в единицу времени:
![]()
Работа равна произведению силы на перемещение: A = F*S. Учитывая, что скорость V=S/t, получим:
![]()
Получаем формулу для перевода лошадиных сил в принятую в международной системе СИ единицу измерения мощности – Ватт:
![]()
Перейдем к основной части, а именно – к техническим характеристикам автомобиля.
Некоторые характеристики и расчёты будут приводиться приближенно, поскольку мы не претендуем на умопомрачительную точность расчетов, важнее понять физику и математику процесса.
m = 2 тонны = 2000 кг – масса автомобиля (масса авто 1940 кг, считаем что в ней водитель массой 60 кг и больше ничего/никого).
P = 670 л.с. (по паспорту 625 л.с., но реально мощность выше – измерено на динамометрическом стенде в ролике DSC OFF https://www.youtube.com/watch?v=ysg0Depmyjc. В этой статье мы ещё обратимся к замерам отсюда.)
Разгон 0-100 км/ч: 3.2-3.3 с (по паспорту, замерам)
Разгон 100-200 км/ч: 7.5-7.6 с (по паспорту, замерам)
Мощность двигателя генерируется на маховике, потом через сцепление передается в КПП, далее через дифференциалы, привода, карданный вал передается на колёса. В результате эти механизмы поглощают часть мощности и итоговая мощность, поставляемая к колесам, оказывается меньше на 18-28%. Именно мощность на колесах определяет динамические характеристики автомобиля.
У меня нет сомнений в гениальности инженеров БМВ, но, для начала, возьмем для удобства потери мощности 20%.
Вернемся к нашим физическим баранам. Для вычисления разгона нам нужно связать мощность со скоростью и временем разгона. Для этого воспользуемся вторым законом Ньютона:

Вооружившись этими знаниями, получим конечную формулу:

Выражая отсюда t, получим итоговую формулу для вычисления разгона:
![]()
На самом деле в паспорте автомобиля указывается максимальная мощность, достигаемая двигателем при определенном числе оборотов. Ниже приведена зависимость мощности двигателя от числа оборотов (синяя линия). Строго говоря, параметры этой кривой зависят от номера передачи, так что для определенности скажем, что график для 5й передачи.
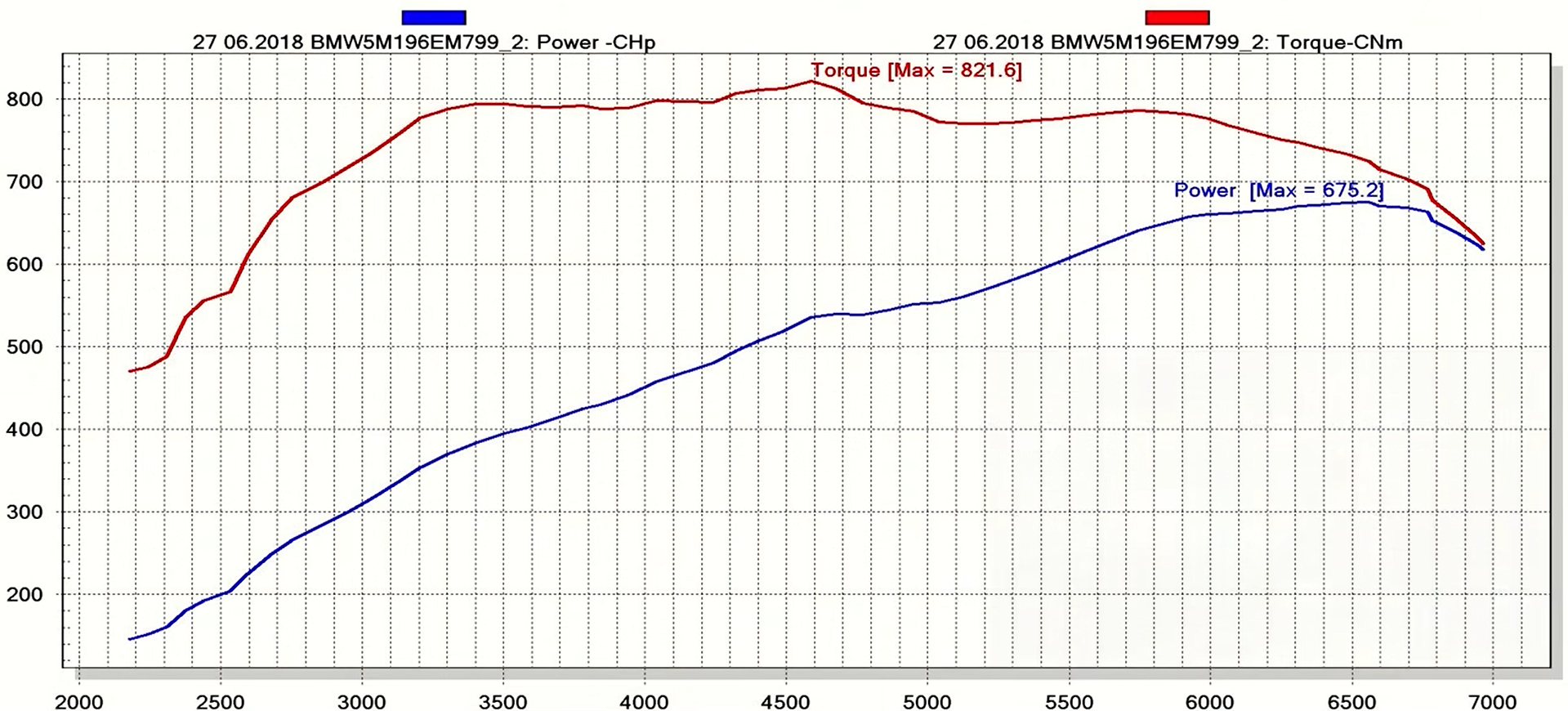
Главное, что мы должны усвоить из этого графика – мощность автомобиля не постоянна во время движения, а увеличивается по мере роста оборотов двигателя.
Перейдем к расчету разгона от 0 до 100 км/ч. Переведем скорость в м/с:
![]()
При разгоне от 0 до 100 км/ч автомобиль практически сразу переключается с первой передачи на вторую, и при достижении около 90 км/ч переключается на третью. Будем считать, что на всём протяжении разгона автомобиль разгоняется на второй передаче, причем максимальная мощность будет меньше 670 л.с., поскольку передача ниже пятой. Возьмём в качестве начальной мощности при 0 км/ч мощность 150 л.с. (при 2000 об/мин), конечную – 600 л.с. (7000 об/мин):
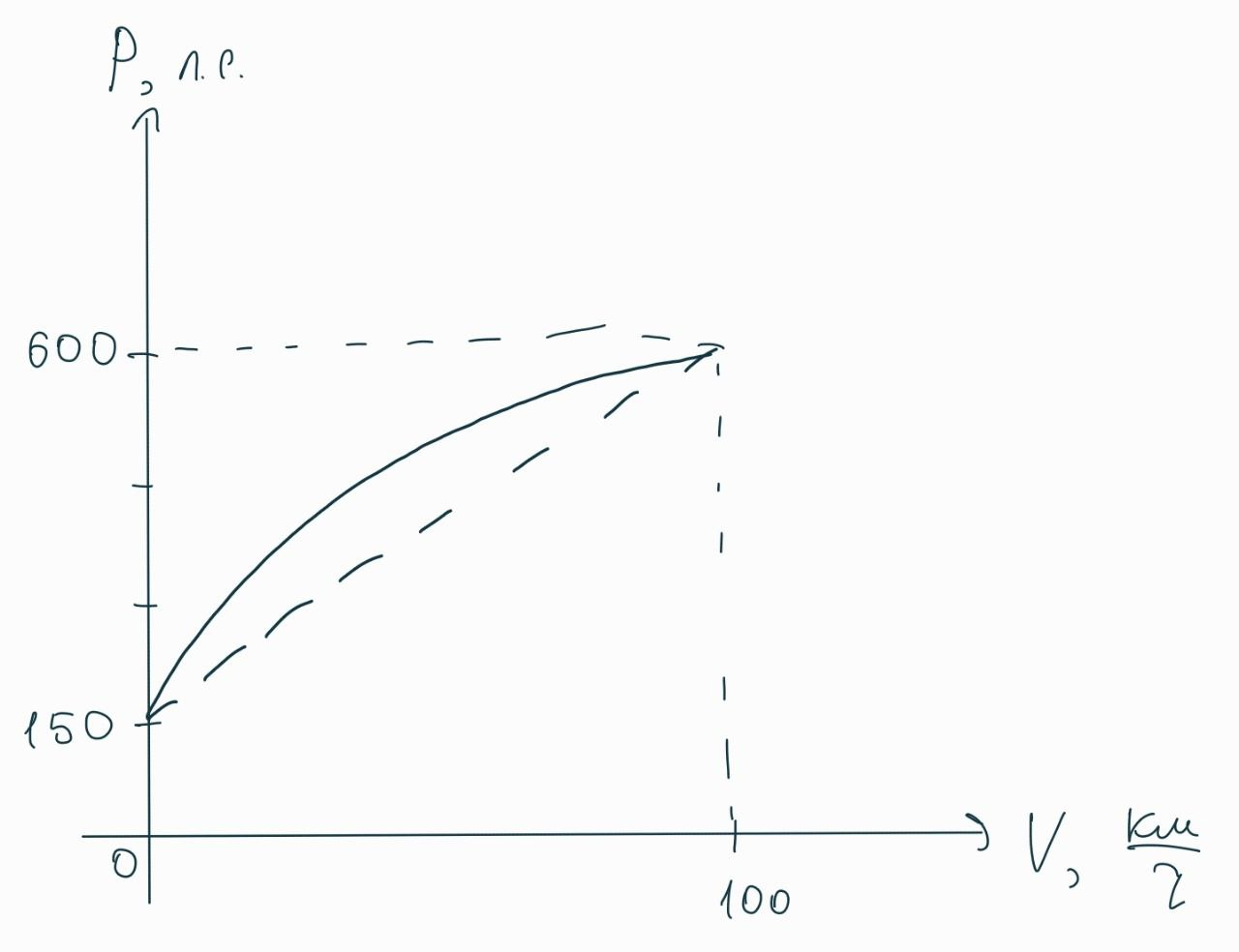
Чтобы не считать сложные интегралы для вычисления средней мощности, скажем следующие слова: учитывая приближенный характер наших расчетов, проскальзывание авто при ускорении, а также сопротивление воздуха (хотя при разгоне от 0 до 100 оно играет не такую большую роль, как при разгоне до 200 км/ч), будем считать, что мощность зависит от скорости линейно, тогда средняя мощность при разгоне от 0 до 100 км/ч составляет:
![]()
Пришло время учесть потери мощности, о которых было сказано ранее, а заодно перевести мощность в кВт (1 кВт = 1000 Вт) для удобства. Потери мощности 20%, значит эффективность 80%=0.8:
![]()
Теперь подставляем всё в конечную формулу:

Получили довольно близкий к “паспортным” 3.3 с результат, ура! Специально не стал ничего дополнительно подгонять, дабы подчеркнуть приближенный характер расчёта, хотя это было довольно просто сделать, взяв, например, чуть больше мощность.
Теперь, ради интереса и проверки самих себя, вычислим разгон 100-200 км/ч.
С ростом скорости растёт трение воздуха, для движения используются более высокие передачи КПП (3-я, 4-я, 5-я), но при этом уменьшается проскальзывание колес. Так что оставим среднюю мощность 375 л.с.
Так делать конечно же нельзя! После 2-й передачи двигатель работает на “комфортных” для себя оборотах 4000-7000 об/мин, поэтому средняя мощность будет гораздо выше, поскольку выше будет начальная мощность для каждой передачи. Здесь уже не получится считать, что автомобиль едет только на 4-й передаче на всем протяжении разгона, но можно считать, что он проехал одинаковые промежутки времени на 3-й, 4-й и 5-й передаче, и пусть график зависимости мощности от числа оборотов для них одинаков, поэтому построим общую условную кривую зависимости мощности от скорости:
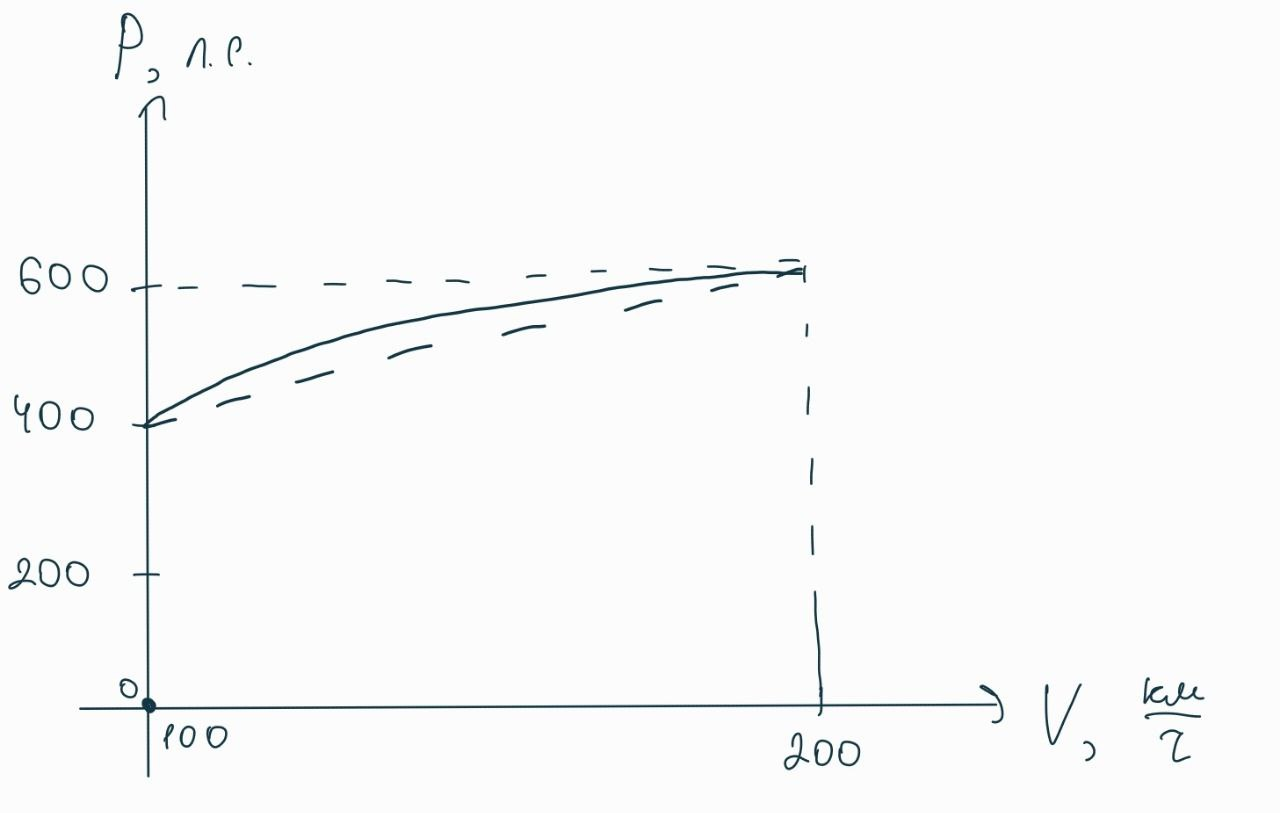
Опять же, считаем для простоты зависимость мощности от скорости линейной, тогда получаем среднюю и реальную мощность:

Тогда итоговое время разгона 100-200 км/ч:
![t = dfrac{m (V^2 - V_0^2)}{2P} = dfrac{2 cdot 10^3 text{ кг}cdot left[left(56 dfrac{м}{с} right)^2 - left(28 dfrac{м}{с} right)^2 right]}{2cdot 300 cdot 10^3 text{ Вт}} simeq 7.8 text{ с}](https://habrastorage.org/getpro/habr/upload_files/6d8/4d4/6ae/6d84d46ae2709c0005f27dea37f6fecc.svg)
Время разгона “по паспорту” 7.6 с. И снова мы оказались близко к истине!
P.S. не хочу объяснять, откуда взялось (V^2 – V_0^2), можете повыводить на досуге 🙂
Ну и в общем-то всё. Приведенные рассуждения и вычисления не претендуют на истину в последней инстанции и большую точность, но показывают, что зная “школьные” формулы по физике, можно решать такие интересные задачки, связанные с жизнью.
На написание данной статьи меня подтолкнуло следующее видео:
Используемые в нём расчёты основаны на школьном курсе физики.
Начнём с того, что время t разгона до заданной скорости v (например, до 100 км/ч) определяется по формуле
t = v/a, (1)
где
a — ускорение.
Вообще говоря, в силу разных причин ускорение меняется по мере разгона, но мы можем оценить его максимальную величину a_max, тем самым найдя минимально возможное время разгона t_min.
Согласно второму закону Ньютона ускорение a любого тела прямо пропорционально приложенной к телу силе F и обратно пропорционально его массе m:
a = F/m. (2)
Как известно, на ровной дороге автомобиль ускоряется за счёт силы трения между шинами и поверхностью дороги. Максимальная величина силы трения F_max определяется по формуле
F_max = μ∙N, (3)
где
μ — коэффициент трения покоя (для большинства летних гражданских шин μ ≈ 1);
N — нормальная сила давления.
Заметим, что при пробуксовке ведущих колёс коэффициент трения покоя меняется на коэффициент трения скольжения, который приблизительно вдвое меньше. Поэтому при пробуксовке тяга, а в след за ней и ускорение, падают не менее чем вдвое.
Таким образом, зная силу N, приходящуюся на ведущие колёса автомобиля, можно определить максимальную тягу, создаваемую шинами, а уже по ней найти ускорение и время разгона.
1 ПОЛНОПРИВОДНЫЕ АВТОМОБИЛИ
Для полноприводных автомобилей эта сила N равна весу P автомобиля:
N = P = m∙g, (4)
где
m — масса автомобиля, кг;
g — ускорение свободного падения (9.81 м/с²).
Если подставить (2), (3) и (4) в (1), то получится
t_min = v/(μ∙g), (5)
что для v = 100 км/ч = 27.78 м/c даёт
t_min ≈ 27.78/9.81 = 2.83 с
2 МОНОПРИВОДНЫЕ АВТОМОБИЛИ
С моноприводными автомобилями ситуация иная. У них за счёт продольного переноса веса во время разгона сила N будет определяться по формуле
N = δ∙P ± m∙a∙H/B = m∙(δ∙g ± a∙H/B), (6)
где
δ — статическая доля веса автомобиля, приходящаяся на ведущую ось;
a — ускорение (2), с которым разгоняется автомобиль, м/с²;
H — высота центра тяжести автомобиля, мм;
B — колёсная база, мм.
При этом в случае заднеприводных автомобилей в формуле (6) используется знак “+”, а в случае переднеприводных — знак “−”.
Если подставить (3) и (6) в (2), то получится
a_max = μ∙(δ∙g ± a_max∙H/B),
откуда находим максимально возможное ускорение автомобиля:
a_max = δ∙μ∙g/(1 −+ μ∙H/B). (7)
Осталось подставить (7) в (1):
t_min = (1 −+ μ∙H/B)∙v/(δ∙μ∙g). (8)
В формулах (7) и (8) знак “−” уже используется для заднеприводных автомобилей, а знак “+” — для переднеприводных.
Из выражения (8) видно, что при равномерной загрузке осей заднеприводный автомобиль потенциально будет разгоняться быстрее переднеприводного.
Пример
Оценим минимально возможное время разгона а/м Lada Granta. Для этого автомобиля известно, что статическая развесовка составляет 60/40, а база равна 2476 мм. В качестве высоты центра тяжести примем ⅓ от полной высоты автомобиля, т.е. 500 мм. Тогда по формуле (8) получаем
t_min ≈ (1 + 500/2476)∙27.78/(0.6∙9.81) = 5.67 с
Видно, что по сравнению с полноприводным автомобилем это время оказалось вдвое дольше.
Теперь занизим центр тяжести нашей Гранты на 100 мм:
t_min ≈ (1 + 400/2476)∙27.78/(0.6∙9.81) = 5.48 с
С помощью такого занижения время разгона удалось сократить всего на 0.2 с
Посмотрим, что будет, если мы поставим гоночные шины с коэффициентом трения μ = 1.2:
t_min = (1 + 1.2∙400/2476)∙27.78/(0.6∙1.2∙9.81) = 4.70 с
Разница с исходным вариантом составляет уже почти 1 с, т.е. такая модификация сильнее влияет на сокращение времени разгона.
P.S. Дополнение по просьбе RomanSmirnov
Найдём оценку минимальной мощности, выдаваемой двигателем, при которой рассчитанное время разгона становится достижимым.
Кинетическая энергия T автомобиля (как и любого другого тела) определяется по формуле
T = m∙v²/2. (9)
Тогда мощность с колёс во время разгона не должна быть меньше:
W_min ≥ T/t_min. (10)
Здесь мы пренебрегли силами сопротивления качения и сопротивления воздуха.
Для рассмотренной выше Гранты со снаряженной массой 1160 кг на штатных шинах получается
W_min ≥ 1160∙27.78²/(2∙5.48) = 81.7 кВт = 110 л.с.
Обычно потери в трансмиссии составляют около 25%, что даёт оценку на минимальную мощность двигателя почти 140 л.с. К этому надо добавить мощность сил сопротивления, которые можно оценить в 10% от рассчитанной минимальной мощности с колёс.
Таким образом, если во время разгона мощность с колёс не будет падать ниже 120 л.с. (а мощность двигателя не будет падать ниже 150 л.с.), то минимально возможное время разгона становится достижимым.
Обычно во время разгона обороты двигателя не опускаются ниже 3000 об/мин. При таких оборотах мощность мотора составляет приблизительно половину от максимальной. Следовательно, минимально возможное время разгона можно ожидать на Гранте с двигателем не менее 300 л.с.
P.P.S. Дополнение, касающееся минимально возможного времени заезда на четверть мили
При равноускоренном движении пройденный путь S вычисляется по формуле
S = a∙t²/2,
откуда легко выражается время
t = √[2S/a]. (11)
По этой формуле для полноприводного автомобиля получается
t ≈ √[2∙402/9.81] = 9.05 c,
а для Гранты на штатных шинах —
t ≈ √[2∙402∙(1 + 500/2476)/(0.6∙9.81)] = 12.81 c.
____________________________________________________
Радиус качения шины, скорость и КПП
Степень сжатия, бензин и избыточное давление
Оценка влияния R/S на работу мотора
Турбулизаторы или вихревые генераторы
Расчёт минимально возможного времени разгона
Фаза впрыска
Почему нельзя крутить мотор на заводских прошивках?
Оптимальные формы каналов ГБЦ. Часть 1
Оптимальные формы каналов ГБЦ. Часть 2
Влияние перекрытия распредвалов на ВСХ мотора
Влияние состава смеси на мощность мотора
Влияние угла опережения зажигания на мощность мотора
Расчёт ряда КПП
[an error occurred while processing this directive]
Глава двенадцатая
ЭЛЕКТРОПРИВОД, ВЫБОР ДВИГАТЕЛЯ, АППАРАТУРА УПРАВЛЕНИЯ,
ЭЛЕКТРОСНАБЖЕНИЕ, ВОПРОСЫ ТЕХНИКИ БЕЗОПАСНОСТИ
Определение времени разгона и торможения электропривода производится путем решения уравнения движения. Однако аналитический расчет связан с рядом трудностей, обусловленных тем, что момент сил сопротивления и движущий момент в большинстве случаев являются сложной функцией скорости. На практике широко используются приближенные графоаналитические методы расчета, в основе которых лежат графические решения уравнения движения. Рассмотрим один из этих методов.
В уравнении движения (12.2) бесконечно малые приращения dω, dt заменяют малыми конечными приращениями Δω, Δt, а М и Мс — средними значениями в пределах участка скорости Δω:
(12,3)
Мср – Мс,ср = J Δω/Δt,
откуда
| Подставив ω = | πn | , получим |
| 30 |
(12.5)
| Δt = | JπΔn | = | J Δn | , |
| 30(Mcp – Mc,cp) | 9,55 (Mcp – Mc,cp) |
где Δt— время разгона электропривода на участке частоты вращения Δn; J— момент инерции системы; Мср — средний момент на участке частоты вращения Δn; Мс,ср — средний момент сил сопротивления на участке частоты вращения Δn.
Исходными для расчета являются механическая характеристика двигателя и график момента сил сопротивления (рис. 12.1, б).
Графики разбивают на участки Δn, определяют средние значения М и Мс на каждом из участков, а затем по формуле (12.5) оценивают время на каждом из участков. Время разгона электропривода равно сумме времен на каждом из участков:
(12.6)
tp = Δt1 + Δt2 + … + Δtk .
Пример 12.2. Определить время разгона электропривода. Механическая характеристика двигателя и график момента сил сопротивления на валу двигателя изображены на рис. 12.1, б. Момент инерции привода J= 0,4 кг•м2.
Решение. Установившаяся частота вращения определяется точкой пересечения графиков
n = f(M), n= f(Мс) и составляет nуст = = 700 об/мин. График делится на семь (в данном случае) участков скорости с Δn = 100 об/мин.
Определяем средние значения М и Мс на каждом из участков. Подсчитываем время Δt на каждом из участков.
На первом участке
| Δt1 = | J Δn | = | 0,4•100 | = 0,131 с. |
| 9,55(Mcpl – Mc,cpl) | 9,55(52 – 20) |
Таблица 12.1
| № участка | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| Мср, Н • м Мс, ср, Н • м Δt, с |
50 20 0,131 |
55 22 0,127 |
64 24 0,105 |
72 26 0,091 |
86 30 0,075 |
94 32 0,067 |
56 38 0,232 |
Результаты расчета на остальных участках сведены в табл. 12.1
| 7 | ||
| Время разгона электропривода t = | ∑ | Δt = 0,828 с |
| 1 |
Время торможения электропривода определяется так же, как и время разгона, разница в том, что момент двигателя тормозной и действует так же, как и момент сил сопротивления,— против движения.
| Δt = | J Δn | . |
| 9,55(Mcp + Mc,cp) |
[an error occurred while processing this directive]
Процесс разгона
после восстановления питания анализируется
с помощью уравнения движения (3.9)
![]() ,
,
где
∆m
– избыточный момент на валу двигателя.
Время самозапуска
может, быть определено интегрированием
уравнения (3.9) методом Эйлера, который
основан на замене уравнения движения
соотношением
![]() ,
,
(6.1)
где
![]() – конечные приращения скольжения и
– конечные приращения скольжения и
времени;
![]() –
–
значение избыточного момента в
рассматриваемом интервале частоты
вращения.
Расчет
процесса разгона электродвигателей с
момента восстановления питания связан
с решением системы дифференциальных
уравнений, является принципиально
групповым и производится в следующей
последовательности [3]:
1. Определяются
индуктивные сопротивления трансформатора
и других элементов, расположенных
между источником питания и сборными
шинами, к которым подключены рассматриваемые
двигатели, а так же находятся сопротивления
двигателей в зависимости от скольжения,
приведенные к базисным условиям (смотри
разделы 5.1, 5.2).
2. Определяется
эквивалентное сопротивление двигателей,
участвующих в самозапуске при
![]() (смотри
(смотри
раздел 5.2):
![]() .
.
(6.2)
3. Находится
напряжение двигателей в момент подачи
питания, т.е. в момент начала самозапуска
(смотри раздел 5.2):
 .
.
(6.3)
4. Рассчитываются
вращающий момент и момент сопротивления
каждого двигателя, участвующего в
самозапуске при этом можно использовать
формулы (3.3, 3.13).
5. Определяется
избыточный момент на валу каждого
двигателя:
![]() .
.
(6.4)
Быстрее
всех запустится двигатель, у которого
больше отношение
![]() .
.
6. Находится
приращение скольжения
![]() на интервале ∆t:
на интервале ∆t:
![]() .
.
(6.5)
Скольжение в начале
следующего интервала времени будет
определяться так:
![]() .
.
(6.6)
На каждом
последующем интервале времени процесс
повторяется начиная с пункта 2 при новом
значении скольжения. При этом напряжение
на шинах электродвигателей повышается,
что облегчает самозапуск.
По
достижению одним из двигателей
номинального скольжения двигатель
вводится в расчет своим
![]() .
.
Если избыточный момент на валу одного
или нескольких двигателей получается
отрицательным, то самозапуск оказывается
или затянутым, или
невозможным
вообще. В этом случае необходимо выяснить
условия, при которых самозапуск будет
обеспечен. То есть
необходимо
решить вопрос о возможности
уменьшения
времени перерыва питания, целесообразности
отключения части электродвигателей
или их разгрузки и снова рассчитать
процесс
самозапуска.
Расчет заканчивается при достижении
всеми двигателями установившегося
значения скольжения.
Полное
время самозапуска двигателей определяют
как сумму
отдельных интервалов времени.
Блок-схема программы
расчета разгона асинхронного двигателя
приведена на
рис.
6.1
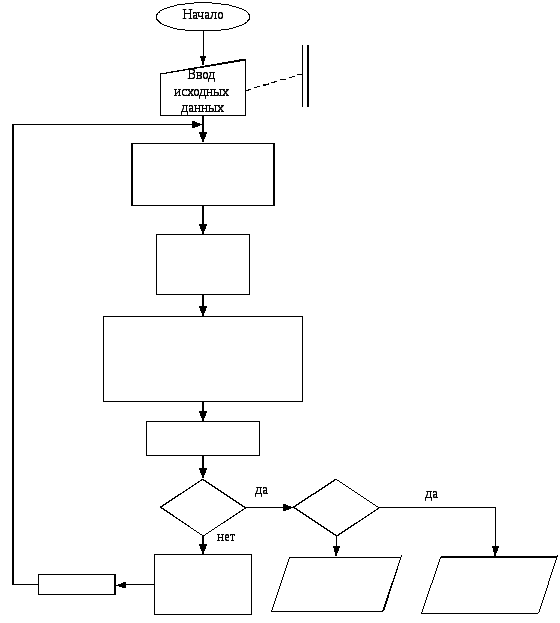
Рисунок 6.1 –
Блок-схема программы расчета разгона
асинхронного двигателя
Для
пояснения
изложенного рассмотрим пример расчета
разгона электродвигателей.
Пример 7. Расчет
разгона электродвигателей
Алгоритм
расчета разгона электродвигателей
представлен выше. Эквивалентное
сопротивление системы
![]() ,
,
её эквивалентная эдс![]() ,
,
а также эквивалентное сопротивление
электродвигателей![]() и
и
остаточное напряжение в начале самозапуска![]() было
было
определено ранее в разделе 5.
Избыточный
момент первого двигателя на первом шаге
![]() .
.
Приращение
скольжения первого двигателя на первом
шаге
![]() при интервале
при интервале![]() с
с
![]() .
.
Скольжение в
начале следующего интервала времени
![]() .
.
Аналогично
производится расчет для двух других
двигателей, определяются их скольжение
и напряжение на шинах в начале следующего
шага. Результаты численного расчета
сведены в табл. 6.1. В табл. 6.1 результаты
расчета приведены через один шаг.
При
достижения всеми двигателями номинального
момента расчет прекращается. По
результатам расчета строятся
характеристики зависимостей
![]()
По
результатам расчетов видно, что время
разгона двигателей соответственно
составляет
![]() ,
,![]() ,
,![]() .
.
Характеристики
![]() при
при
самозапуске представлены на рисунках
(4.3-4.5).
Результаты
расчета изменения напряжения на шинах
![]() даны на рис. 6.2.
даны на рис. 6.2.
Таблица
6.1 – Результаты расчета разгона
асинхронных двигателей
|
|
|
|
|
|
|
|
|
|
|
|
|
0,595 |
4,354 |
0,186 |
4,358 |
0,639 |
0,248 |
0,391 |
0,046 |
|||
|
0 |
0,642 |
4,263 |
0,172 |
4,267 |
1,411 |
0,751 |
0,615 |
0,303 |
0,313 |
0,037 |
|
0,751 |
4,083 |
0,147 |
4,085 |
0,567 |
0,437 |
0,129 |
0,015 |
|||
|
0,549 |
4,451 |
0,201 |
4,455 |
0,668 |
0,283 |
0,386 |
0,045 |
|||
|
0,2 |
0,605 |
4,333 |
0,183 |
4,337 |
1,432 |
0,754 |
0,638 |
0,325 |
0,313 |
0,037 |
|
0,736 |
4,106 |
0,150 |
4,108 |
0,577 |
0,442 |
0,135 |
0,016 |
|||
|
0,460 |
4,674 |
0,240 |
4,680 |
0,735 |
0,363 |
0,372 |
0,044 |
|||
|
0,6 |
0,532 |
4,490 |
0,208 |
4,495 |
1,478 |
0,760 |
0,689 |
0,375 |
0,314 |
0,037 |
|
0,703 |
4,157 |
0,157 |
4,160 |
0,600 |
0,453 |
0,148 |
0,017 |
|||
|
0,373 |
4,948 |
0,296 |
4,957 |
0,812 |
0,454 |
0,358 |
0,042 |
|||
|
1 |
0,458 |
4,678 |
0,241 |
4,684 |
1,533 |
0,767 |
0,748 |
0,435 |
0,314 |
0,037 |
|
0,668 |
4,217 |
0,165 |
4,220 |
0,627 |
0,466 |
0,161 |
0,019 |
|||
|
0,290 |
5,300 |
0,381 |
5,314 |
0,902 |
0,554 |
0,349 |
0,041 |
|||
|
1,4 |
0,385 |
4,907 |
0,287 |
4,916 |
1,601 |
0,774 |
0,819 |
0,503 |
0,316 |
0,037 |
|
0,629 |
4,287 |
0,176 |
4,290 |
0,660 |
0,482 |
0,177 |
0,021 |
|||
|
0,208 |
5,795 |
0,530 |
5,819 |
1,012 |
0,664 |
0,348 |
0,041 |
|||
|
1,8 |
0,310 |
5,203 |
0,356 |
5,215 |
1,689 |
0,783 |
0,904 |
0,581 |
0,324 |
0,038 |
|
0,587 |
4,371 |
0,188 |
4,375 |
0,699 |
0,502 |
0,197 |
0,023 |
|||
|
0,126 |
6,629 |
0,877 |
6,687 |
1,153 |
0,788 |
0,365 |
0,043 |
|||
|
2,2 |
0,233 |
5,620 |
0,473 |
5,640 |
1,818 |
0,796 |
1,014 |
0,670 |
0,344 |
0,040 |
|
0,539 |
4,473 |
0,205 |
4,478 |
0,751 |
0,527 |
0,223 |
0,026 |
|||
|
0,038 |
9,045 |
2,894 |
9,496 |
1,334 |
0,933 |
0,402 |
0,047 |
|||
|
2,6 |
0,150 |
6,325 |
0,735 |
6,368 |
2,087 |
0,817 |
1,181 |
0,778 |
0,403 |
0,047 |
|
0,485 |
4,606 |
0,228 |
4,612 |
0,830 |
0,559 |
0,271 |
0,032 |
|||
|
0,009 |
12,913 |
12,277 |
17,818 |
1,318 |
0,984 |
0,334 |
0,039 |
|||
|
3 |
0,047 |
8,562 |
2,335 |
8,874 |
2,656 |
0,850 |
1,438 |
0,926 |
0,512 |
0,060 |
|
0,415 |
4,806 |
0,266 |
4,813 |
0,959 |
0,605 |
0,354 |
0,042 |
|||
|
0,009 |
12,913 |
12,277 |
17,818 |
1,395 |
0,984 |
0,411 |
0,048 |
|||
|
3,4 |
0,009 |
12,913 |
12,277 |
17,818 |
3,263 |
0,875 |
1,395 |
0,986 |
0,409 |
0,048 |
|
0,325 |
5,138 |
0,340 |
5,149 |
1,110 |
0,673 |
0,437 |
0,051 |
|||
|
0,009 |
12,913 |
12,277 |
17,818 |
1,418 |
0,984 |
0,434 |
0,051 |
|||
|
3,8 |
0,009 |
12,913 |
12,277 |
17,818 |
3,490 |
0,882 |
1,418 |
0,986 |
0,432 |
0,051 |
|
0,219 |
5,716 |
0,504 |
5,738 |
1,267 |
0,766 |
0,501 |
0,059 |
|||
|
0,009 |
12,913 |
12,277 |
17,818 |
1,460 |
0,984 |
0,477 |
0,056 |
|||
|
4,2 |
0,009 |
12,913 |
12,277 |
17,818 |
3,988 |
0,895 |
1,460 |
0,986 |
0,475 |
0,056 |
|
0,096 |
7,126 |
1,153 |
7,219 |
1,514 |
0,891 |
0,624 |
0,073 |
|||
|
0,009 |
12,913 |
12,277 |
17,818 |
1,566 |
0,984 |
0,583 |
0,068 |
|||
|
4,6 |
0,009 |
12,913 |
12,277 |
17,818 |
5,939 |
0,927 |
1,566 |
0,986 |
0,581 |
0,068 |
|
0,009 |
12,913 |
12,277 |
17,818 |
1,566 |
0,989 |
0,577 |
0,068 |
Рисунок
6.2 – Характеристика зависимости
![]()
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
30.03.2015971.32 Кб61учебник под ред. А.А.Столяра.pdf
![Калькулятор мощности и динамики разгона [ v 2.2 ]](https://www.tech-drive.ru/wp-content/uploads/2014/05/Draggraising__LabSkir_0002.jpg)

Масса автомобиля кг.
Время разгона без учета сцепления с дорогой сек.
Мощность двигателя л.с.
Привод:***
передний
задний.
Коэффициент сцепления резины с дорогой Примечание: выбрать из таблицы (столбец замедление) или рассчитать здесь.
Величина потерь в трансмиссии %. (3% — МКПП и РКПП, 5% — АКПП, Моно-привод — 2%, Полный привод — 5%. В сумме: от 6% до 10% )
Время переключения передач сек.(МКПП — 0.5 с., АКПП — 0,3 с., РКПП — 0,1 с., DSG/PDK 0,0 c.)
Средняя мощность на преодоление сопротивления воздуха л.с.**
Разгон от 0 до км/ч
Результат:
Сравнительная таблица с техническими данными:
| Марка | Модель | Год Начала Выпуска | Масса, кг. | Мощ-ть, лс. | КПП и привод. | 0-100 км/ч, с. (офиц.) | Примечания. |
|---|---|---|---|---|---|---|---|
| BMW | M5 | 2013 | 1945 | 560 | РКПП, задний | 4,3 | Для разгона до 100 км/ч требуется 3 передачи, необходимо увеличивать время на переключение передач. Видео |
| BMW | 1M | 2011 | 1495 | 340 | МКПП, задний | 4,9 | Фактическая мощность двигателя 360-380 л.с. в стоке |
| BMW | M3 | 2000 | 1570 | 343 | МКПП, задний | 5,2 | |
| BMW | M3 | 2013 | 1520 | 431 | РКПП, задний | 4,1 | |
| Porsche | Cayenne Turbo S | 2013 | 2170 | 550 | АКПП, полный | 4,5 | |
| Corvette | ZR1 | 2008 | 1508 | 647 | МКПП, задний | 3,4 | Разгоняется до 110 км/ч на 1 передаче. По расчетам, для разгона за 3,4 сек. требуется не более 350 л.с. на колесах. При идеальном сцеплении с дорогой, на гоночных сликах должен разгоняться за 2,1 сек. ! |
| Porsche | 911 Turbo S | 2014 | 1605 | 560 | DSG, полный | 3,1 | |
| Nissan | GT-R | 2012 | 1750 | 550 | РКПП, полный | 2,7 | Хаха, Nissan, спасибо класным ребятам из отдела маркетинга за такой впечатляющий разгон! Законы физики? Не, не слышали. Реальный результат 3,3-3,5 сек. Видео |
Примечания:
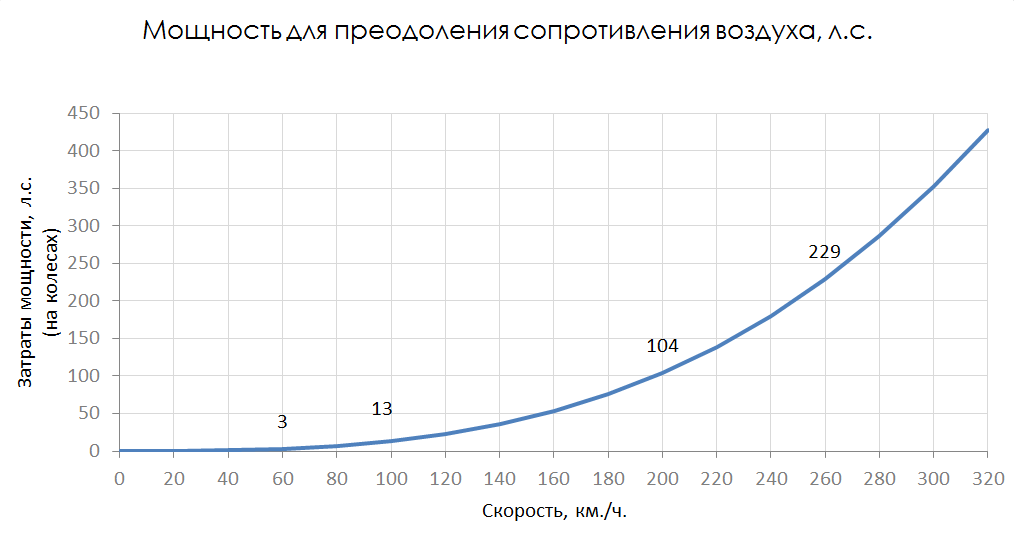
Зависимость мощность теряющейся на сопростивление воздуху в зависимости от скорости легкового автомобиля. Плотность воздуха принята при температуре 20 градусов, площадь автомобиля 2,65 м2 (легковой), коэффициент лобового сопротивления 0,28.
* На одно переключение (с 1 на 2 передачу) тратится: у АКПП: 0,3 сек., у МКПП в среднем 0.5 сек. У некоторых автомобилей, например BMW M5 F10 2012, для достижения 100 км/ч требуется еще одно переключение на 3 передачу. В очень редких случаях, например Corvette ZR-1, разгон до 100 км/ч возможен без переключений, на 1 передаче. В случае с роботизированными коробками с двумя сцеплениями (PDK, DSG) переключения происходят без прекращения передачи крутящего момента.
** на 100 км/ч у легковых автомобилей потери от сопротивления воздуху около 13 л.с. , среднее значение при разгона от 0 до 100 км/ч — 5 л.с., для внедорожников средние потери — 10 л.с. Сопротивление воздуху растет нелинейно. На скорости 200 км/ч потери уже порядка 100 л.с.
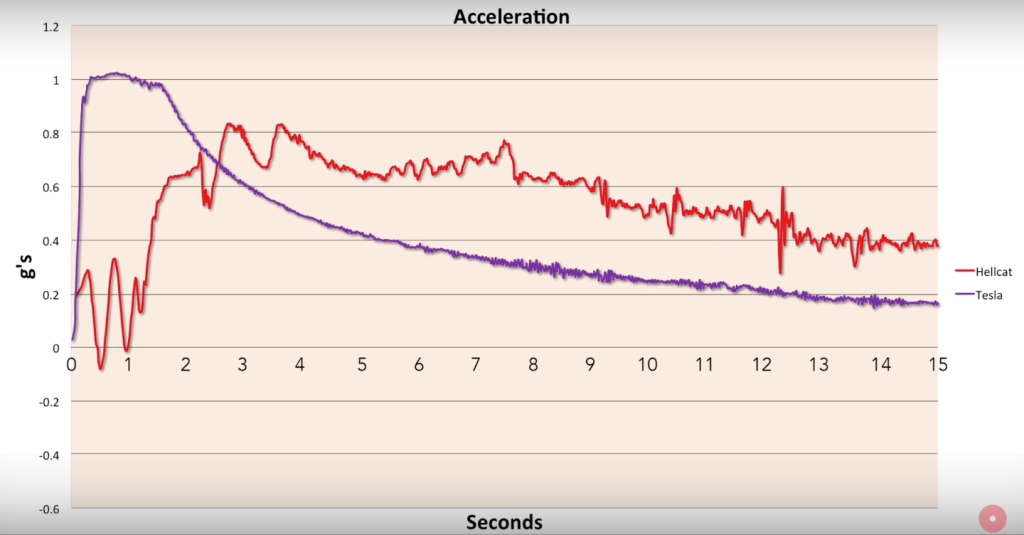
На полном приводе ускорение, на гражданской резине, достигает 1g, а на заднем только 0,8g. По личным замерам — задняя ось загружается на 75% при разгоне. [Источник: motrolix.com ]
*** Итоговое ускорение не может превышать коэффициент сцепления колес с дорогой. В свою очередь, коэффициент сцепления необходимо корректировать, учитывая привод автомобиля и загрузку ведущих колес. При использовании полного привода итоговый коэффициент равен коэффициенту трения резины. При использовании заднего или переднего привода итоговый коэффициент сокращается на 25 или 50%, в зависимости от того, какой вес приходится на ведущие колеса.

