Содержание:
Пружинные и математические маятники:
Тело или система тел, совершающие периодические колебательные движения, называются маятниками. Большинство колебательных движений, встречающихся в природе, напоминают движение пружинных и математических маятников.
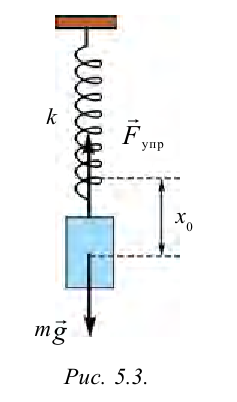
Система, состоящая из груза массой 

Если немножко растянуть пружину и отпустить, то груз придет в колебательное движение в вертикальном направлении.
С помощью опытов мы определили, что смещение груза в зависимости от времени изменяется следующbм образом:
Если учесть, что ускорение тела, совершающего гармонические колебания  , то уравнение (5.10) примет вид:
, то уравнение (5.10) примет вид:
Из этого уравнения мы имеем:

Значит, частота циклического колебания тела, совершающего гармоническое колебание, зависит от параметров тел, входящих в систему колебания. Формула (5.12) называется формулой для
определения циклической (периодической) частоты пружинного маятника .
.
Период колебания пружинного маятника прямо пропорционален выведенному из-под квадратного корня значению массы груза и обратно пропорционален выведенному из-под квадратного корня значению упругости пружины.
Рассмотрим обмен энергиями в пружинном маятнике. Кинетическая энергия маятника, если не учитывать массу пружины, равна кинетической энергии груза,  . В предыдущих темах было показано, что скорость можно выразить формулой
. В предыдущих темах было показано, что скорость можно выразить формулой  . В таком случае кинетическая энергия маятника равна
. В таком случае кинетическая энергия маятника равна

Потенциальная энергия пружинного маятника равна энергии деформации пружины, т.е.:

В большинстве случаев важно знать полную энергию системы:

Если учесть, что  ,
,


Обратите внимание, что полная энергия пружинного маятника является постоянной величиной, не зависящей от времени, т.е. соблюдается выполнение закона сохранения механической энергии.
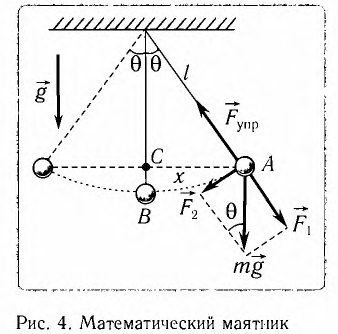
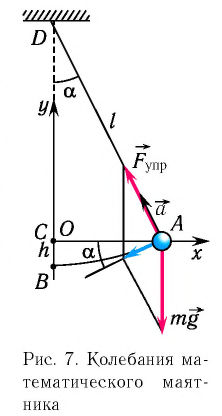
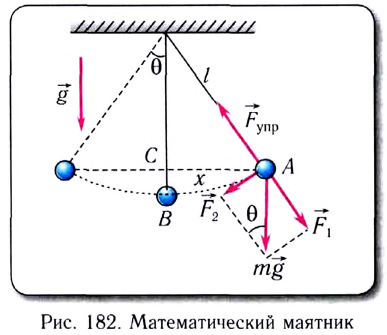
Материальная точка, подвешенная на нерастяжимой и невесомой нити и совершающая периодическое колебательное движение вокруг равновесного состояния, называется математическим маятником.
Когда маятник находится в устойчивом равновесном состоянии, вес материальной точки  уравновешивает силу натяжения
уравновешивает силу натяжения  (рис. 5.4), так как их модули равны и направлены по одной линии в противоположные стороны. Если наклонить маятник на угол
(рис. 5.4), так как их модули равны и направлены по одной линии в противоположные стороны. Если наклонить маятник на угол  , силы
, силы  и не смогут уравновесить друг друга из-за взаимного расположения под углом. В результате сложения таких сил появится возвращающая сила, которая вернет маятник в равновесное состояние. Если отпустить маятник, то под воздействием возвращающей силы он начинает двигаться в сторону равновесного состояния.
и не смогут уравновесить друг друга из-за взаимного расположения под углом. В результате сложения таких сил появится возвращающая сила, которая вернет маятник в равновесное состояние. Если отпустить маятник, то под воздействием возвращающей силы он начинает двигаться в сторону равновесного состояния.
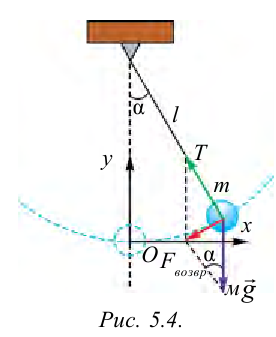
Из рис. 5.4. видим, что:

Согласно второму закону Ньютона, сила  придает материальной точке ускорение
придает материальной точке ускорение  , поэтому
, поэтому

Из-за того, что угол наклона очень маленький  , а сила
, а сила  направлена противоположно смещению, формулу (5.19) можно записать в виде
направлена противоположно смещению, формулу (5.19) можно записать в виде

Если смещение материальной точки (шарика) во время колебательного процесса отметить буквой  и учитывать соотношение
и учитывать соотношение  , получим
, получим 
Следовательно 
Исходя из смысла периода колебания и учитывая, что  получаем
получаем

Эта формула, определяющая период колебания математического маятника, называется формулой Гюйгенса. Отсюда вытекают следующие законы математического маятника:
- при маленьких углах наклона (а) математического маятника, его период колебания не зависит от амплитуды колебания.
- период колебания математического маятника также не зависит от массы подвешенного на него груза;
- период колебания математического маятника прямо пропорционален выведенному из-под квадратного корня значению длины маятника и обратно пропорционален выведенному из-под квадратного корня значению ускорения свободного падения.
Отсюда колебание математического маятника записывается следующим выражением:
Следует отметить, что когда амплитуда колебания или угол наклона велики, колебания математического маятника не являются гармоническим. В этом случае нельзя считать  и для решения уравнения движения не применяется закон синусов или косинусов.
и для решения уравнения движения не применяется закон синусов или косинусов.
Пример:
Период колебания первого маятника равен 3 сек, второго – 4 сек. Найдите период колебания маятника с длиной, равной сумме длин этих маятников.
Дано:
Найти:

Формула:
Решение:
Ответ: 5 cек.
Пружинный и математический маятники
Второй закон Ньютона (основной закон динамики): ускорение, приобретаемое материальной точкой, прямо пропорционально равнодействующей всех сил, действующих на нее, и обратно пропорционально массе материальной точки:
Закон Гука: модуль силы упругости  , возникающей в теле при упругих деформациях, прямо пропорционален его абсолютному удлинению (сжатию)
, возникающей в теле при упругих деформациях, прямо пропорционален его абсолютному удлинению (сжатию)  :
:

где k — жесткость тела,  — длина недеформированного тела, l — длина деформированного тела.
— длина недеформированного тела, l — длина деформированного тела.
Рассмотрим пружинный маятник, представляющий собой колебательную систему, образованную грузом на пружине.
Пусть груз массой т, лежащий на гладкой горизонтальной поверхности, прикреплен к свободному концу невесомой пружины жесткостью k (рис. 3). Второй конец пружины закреплен относительно данной инерциальной системы отсчета (ИСО).
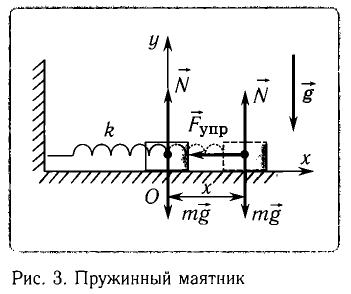
Выведем груз из положения равновесия, сместив его на расстояние х вправо. В пружине возникнет сила упругости  направленная влево.
направленная влево.
Запишем второй закон Ньютона для движения груза:

В проекции на ось Ох действующих на груз сил с учетом закона Гука получаем
 или
или 
Следовательно,
Это уравнение аналогично уравнению гармонических колебаний
Сравнивая эти два уравнения, находим циклическую частоту колебаний пружинного маятника:
Тогда период колебаний пружинного маятника можно найти по формуле
Как следует из полученной формулы, период колебаний пружинного маятника не зависит от амплитуды его колебаний (в пределах выполнимости закона Гука).
Свойство независимости периода колебаний маятника от амплитуды называется изохронностью (от греческих слов  , — равный и
, — равный и  — время). Таким образом, колебания пружинного маятника обладают свойством изохронности.
— время). Таким образом, колебания пружинного маятника обладают свойством изохронности.
Изохронность колебаний маятника была открыта Галилео Галилеем в 1583 г. при изучении движения грузика, подвешенного на нити. Моделью данной колебательной системы является математический маятник.
Математическим маятником называется материальная точка массой т, подвешенная на невесомой нерастяжимой нити длиной l в поле каких-либо сил, например силы тяжести Земли (рис. 4).
Математический маятник — это идеализированная модель реального маятника при условии, что длина нити намного больше размеров подвешенного на ней тела и масса нити намного меньше массы тела. Кроме того, деформацией нити можно пренебречь.
Галилео Галилей экспериментально определил, что период малых колебаний (9 < 10°) математического маятника в поле силы тяжести не зависит от его массы и амплитуды колебаний (угла начального отклонения  ). Он установил также, что период этих колебаний прямо пропорционален
). Он установил также, что период этих колебаний прямо пропорционален  .
.
Период малых колебаний математического маятника в поле силы тяжести Земли определяется по формуле Гюйгенса:
При углах отклонения математического маятника  20° погрешность расчета периода колебаний математического маятника по формуле Гюйгенса не превышает 1 %.
20° погрешность расчета периода колебаний математического маятника по формуле Гюйгенса не превышает 1 %.
Отклонение маятника от положения равновесия будем характеризовать углом (см. рис. 4), который нить образует с вертикалью.
Согласно второму закону Ньютона для движения шарика можем записать:

Смещение маятника вдоль дуги х = l, где угол выражен в радианах. Возвращающей силой в данном случае является проекция  силы тяжести на касательную к дуге (см. рис. 4), которая определяется по формуле:
силы тяжести на касательную к дуге (см. рис. 4), которая определяется по формуле:
Заметим, что при малых углах и длина дуги
и длина дуги
 очень мало отличается от длины хорды
очень мало отличается от длины хорды  Для небольших углов (до 10°) значения и sin различаются меньше чем на I %. Поэтому для таких углов равенство
Для небольших углов (до 10°) значения и sin различаются меньше чем на I %. Поэтому для таких углов равенство
 (1)
(1)
является очень хорошим приближением.
Подставляя в выражение (1) значение , получим
, получим
Таким образом, уравнение движения маятника запишется в виде

Поскольку полученное уравнение совпадает с уравнением гармонических колебаний  , то можно сделать вывод, что при малых отклонениях маятник совершает гармонические колебания с циклической частотой
, то можно сделать вывод, что при малых отклонениях маятник совершает гармонические колебания с циклической частотой
Как видно из этой формулы, циклическая частота не зависит от массы маятника и амплитуды его колебаний, а определяется только его длиной и ускорением свободного падения.
В общем случае, когда маятник находится в однородных полях нескольких сил, для определения периода колебаний следует ввести «эффективное ускорение»  , характеризующее результирующее действие этих полей, и период колебаний маятника будет определяться по формуле
, характеризующее результирующее действие этих полей, и период колебаний маятника будет определяться по формуле
Пример:
Определите амплитуду А, циклическую частоту  , период Т и начальную фазу
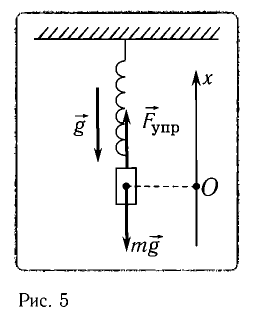
, период Т и начальную фазу  колебаний тела массой m = 0,50 кг, подвешенного к вертикальной пружине (рис. 5). Известно, что в состоянии покоя тело растягивает пружину на
колебаний тела массой m = 0,50 кг, подвешенного к вертикальной пружине (рис. 5). Известно, что в состоянии покоя тело растягивает пружину на  = 10 мм и для возбуждения колебаний его смещают вниз на x = 30 мм и отпускают.
= 10 мм и для возбуждения колебаний его смещают вниз на x = 30 мм и отпускают.
Решение
Циклическая частота колебаний «вертикального» пружинного маятника также определяется по формуле
Найдем жесткость k пружины. Из условия равновесия тела следует
По закону Гука
В проекции на ось Ох условие равновесия запишется в виде:
Отсюда для циклической частоты  получаем
получаем

Так как по условию задачи тело сместили на расстояние х = 30 мм от положения равновесия, то амплитуда его колебаний

Период колебаний находим из соотношения
Поскольку в начальный момент времени тело было смещено на максимальную величину, то начальная фаза колебаний 
Ответ: 
Пример:
Металлический шарик, подвешенный на длинной легкой нерастяжимой нити, поднимают по вертикали до точки подвеса и отпускают. Затем нить маятника отклоняют на небольшой угол от вертикали и также отпускают. В каком из этих случаев шарик быстрее возвратится в начальное положение?
Решение
В первом случае шарик свободно падает без начальной скорости с высоты h = l, следовательно,
Отсюда находим промежуток времени  , необходимый для возвращения шарика в начальное положение:
, необходимый для возвращения шарика в начальное положение:
Во втором случае промежуток времени  , необходимый шарику для возвращения из отклоненного положения в положение равновесия, найдем из уравнения гармонических колебаний
, необходимый шарику для возвращения из отклоненного положения в положение равновесия, найдем из уравнения гармонических колебаний

Поскольку в начальный момент времени t = 0 маятник имеет максимальное
отклонение от положения равновесия, то начальная фаза колебаний  Так как в положении равновесия x = 0, то
Так как в положении равновесия x = 0, то

Используя формулу для периода колебаний математического маятника
 находим
находим 
Разделив почленно уравнения для промежутков времени  получим
получим
Ответ: шарик быстрее возвратится в начальное положение в случае, когда он движется вертикально вниз.
Пример:
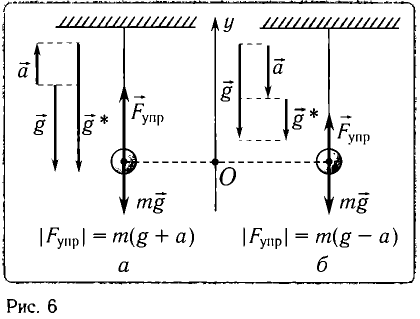
Найдите периоды колебаний математического маятника длиной l= 1,0 м при перемещении его точки подвеса с ускорением, модуль которого а =  , направленным: а) вертикально вверх; б) вертикально вниз.
, направленным: а) вертикально вверх; б) вертикально вниз.
Решение
Период колебаний математического маятника в поле силы тяжести Земли
а) При движении маятника с ускорением  , направленным вверх (рис. 6, а), уравнение движения вдоль оси Оу
, направленным вверх (рис. 6, а), уравнение движения вдоль оси Оу
где Fy — проекция силы упругости нити.
Откуда находим

где g* = g + а — «эффективное ускорение».
Период колебаний определяется по формуле
б) При движении точки подвеса маятника с ускорением  , направленным вниз (рис. 6, б), уравнение движения вдоль оси Оу
, направленным вниз (рис. 6, б), уравнение движения вдоль оси Оу
где Fy — проекция силы упругости нити. Откуда находим

где g*=g-a — «эффективное ускорение». Период колебаний
Ответ: 
Что такое пружинный и математический маятники
Второй закон Ньютона (основной закон динамики): ускорение тела прямо пропорционально результирующей силе и обратно пропорционально массе тела:
Закон Гука: при упругих деформациях сжатия и растяжения модуль силы упругости прямо пропорционален модулю изменения длины тела:

где  — жесткость тела,
— жесткость тела,  — длина недеформированного тела,
— длина недеформированного тела,  -длина деформированного тела.
-длина деформированного тела.
Колебательная система, состоящая из тела с прикрепленной к нему пружиной, называется пружинным маятником. Пружина может располагаться как вертикально (вертикальный пружинный маятник), так и горизонтально (горизонтальный пружинный маятник).
Рассмотрим колебания горизонтального пружинного маятника. Пусть груз массой  лежащий на гладкой горизонтальной поверхности, прикреплен к свободному концу легкой (невесомой) пружины жесткостью
лежащий на гладкой горизонтальной поверхности, прикреплен к свободному концу легкой (невесомой) пружины жесткостью  (рис. 6). Второй конец пружины неподвижен относительно данной инерциальной системы отсчета (ИСО).
(рис. 6). Второй конец пружины неподвижен относительно данной инерциальной системы отсчета (ИСО).
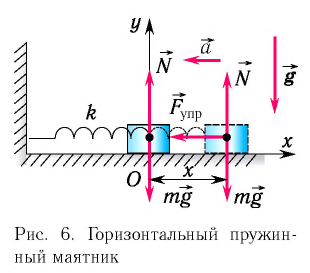
Выведем груз из положения равновесия, сместив его на расстояние  вправо (см. рис. 6). Тогда в пружине возникнет сила упругости
вправо (см. рис. 6). Тогда в пружине возникнет сила упругости  действующая на груз и направленная влево.
действующая на груз и направленная влево.
Согласно второму закону Ньютона для движения груза

В проекции на ось  действующих на груз сил (см. рис. 6) с учетом закона Гука получаем:
действующих на груз сил (см. рис. 6) с учетом закона Гука получаем:

или
Перепишем полученное соотношение в виде:
которое является уравнением гармонических колебаний пружинного маятника.
Сравнивая (1) с уравнением гармонических колебаний  находим циклическую частоту колебаний горизонтального пружинного маятника
находим циклическую частоту колебаний горизонтального пружинного маятника

которая определяется массой  груза и жесткостью
груза и жесткостью  пружины.
пружины.
Для нахождения периода колебаний пружинного маятника воспользуемся формулой  подставив в нее выражение (2):
подставив в нее выражение (2):
Как следует из формул (2) и (3), период и частота колебаний пружинного маятника не зависят от амплитуды его колебаний (в пределах выполнимости закона Гука).
Свойство независимости периода колебаний маятника от амплитуды называется изохронностью (от греч.  (изос) — равный и
(изос) — равный и  (хронос) — время). Следовательно, колебания пружинного маятника обладают свойством изохронности.
(хронос) — время). Следовательно, колебания пружинного маятника обладают свойством изохронности.
Изохронность колебаний маятника была открыта Гали-лео Галилеем в 1583 г. при изучении движения груза, подвешенного на нити. Моделью данной колебательной системы является математический маятник.
Колебательная система, состоящая из находящегося в поле силы тяжести тела, подвешенного на легкой нерастяжимой нити, размеры которого малы по сравнению с длиной нити, а его масса значительно больше массы нити, называется математическим маятником. При таких условиях тело можно считать материальной точкой, а нить — легкой нерастяжимой (рис. 7).
Рассмотрим колебания математического маятника.
Отклонение маятника от положения равновесия будем характеризовать углом  (см. рис. 7), который нить образует с вертикалью.
(см. рис. 7), который нить образует с вертикалью.
После отклонения маятника на него действуют две силы: направленная вертикально вниз сила тяжести  и направленная вдоль нити сила упругости
и направленная вдоль нити сила упругости  Под действием этих сил тело движется по дуге окружности к устойчивому положению равновесия.
Под действием этих сил тело движется по дуге окружности к устойчивому положению равновесия.
Согласно второму закону Ньютона для движения маятника можем записать:
В проекциях на выбранные оси координат  (см. рис. 7) получаем:
(см. рис. 7) получаем:
Для углов отклонения  значения
значения  различаются меньше чем на 1 %. Поэтому при малых углах отклонения
различаются меньше чем на 1 %. Поэтому при малых углах отклонения  и длина дуги
и длина дуги  очень мало отличается от длины хорды
очень мало отличается от длины хорды  где угол
где угол  выражен в радианах. Тогда смещение маятника вдоль дуги
выражен в радианах. Тогда смещение маятника вдоль дуги  Но практически маятник движется вдоль оси
Но практически маятник движется вдоль оси  Из
Из  находим
находим  и, подставив это выражение в (5), получим:
и, подставив это выражение в (5), получим:

Таким образом, силой, возвращающей маятник к устойчивому положению равновесия, является сила упругости его нити.
При малых углах отклонения маятника проекция вектора ускорения  и ею можно пренебречь, а
и ею можно пренебречь, а  тогда из уравнения (6) следует, что
тогда из уравнения (6) следует, что 
Следовательно, уравнение движения маятника вдоль оси  запишется в виде:
запишется в виде:
где  — ускорение, сообщаемое грузу маятника силой упругости нити.
— ускорение, сообщаемое грузу маятника силой упругости нити.
Отсюда получаем уравнение гармонических колебаний математического маятника:
При сравнении уравнения (8) с уравнением гармонических колебаний  можно сделать вывод, что при малых отклонениях математический маятник совершает гармонические колебания с циклической частотой
можно сделать вывод, что при малых отклонениях математический маятник совершает гармонические колебания с циклической частотой

Тогда период малых колебаний математического маятника в поле тяжести Земли определяется по формуле Гюйгенса:
которую впервые получил ученик И. Ньютона Христиан Гюйгенс.
При углах отклонения математического маятника  погрешность рас-чета периода колебаний математического маятника по формуле Гюйгенса не превышает 1 %.
погрешность рас-чета периода колебаний математического маятника по формуле Гюйгенса не превышает 1 %.
Как видно из формул (9) и (10), циклическая частота и период математического маятника не зависят от массы маятника и амплитуды его колебаний, а определяются только его длиной  и модулем ускорения свободного падения
и модулем ускорения свободного падения 
Галилео Галилей первый экспериментально определил, что период малых колебаний  математического маятника длиной
математического маятника длиной  в поле силы тяжести не зависит от его массы
в поле силы тяжести не зависит от его массы  и амплитуды колебаний (угла начального отклонения
и амплитуды колебаний (угла начального отклонения  Он установил также, что период этих колебаний прямо пропорционален
Он установил также, что период этих колебаний прямо пропорционален 
Если маятник приобретает дополнительное ускорение  обусловленное, например, ускоренным движением точки подвеса, то при этом будет изменяться сила упругости нити. В таком случае период колебаний маятника будет определяться по формуле:
обусловленное, например, ускоренным движением точки подвеса, то при этом будет изменяться сила упругости нити. В таком случае период колебаний маятника будет определяться по формуле:
где  — «эффективное ускорение», равное векторной разности
— «эффективное ускорение», равное векторной разности 
- Заказать решение задач по физике
Пример:
Выведите формулу для периода колебаний вертикального пружинного маятника, если масса груза  и жесткость пружины
и жесткость пружины 
Решение
Рассмотрим вертикальное движение груза, происходящее под действием силы упругости пружины и силы тяжести груза после толчка. Начало координат поместим в точку, соответствующую равновесному положению тела (рис. 8). В этом положении пружина растянута на величину  определяемую соотношением:
определяемую соотношением:

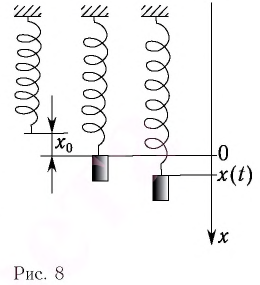
При смещении груза на величину  из положения равновесия сила, действующая со стороны пружины на груз, равна
из положения равновесия сила, действующая со стороны пружины на груз, равна 
Тогда по второму закону Ньютона

С учетом соотношения (1) это уравнение перепишем в виде:
Если ввести обозначение  то уравнение движения груза запишется в виде:
то уравнение движения груза запишется в виде:
Оно описывает гармонические колебания вертикального пружинного маятника с частотой такой же, как у горизонтального пружинного маятника. Следовательно, период колебаний вертикального пружинного маятника такой же, как и горизонтального:
Ответ: 
Таким образом, действующая в колебательной системе постоянная сила только смещает положения равновесия, но не изменяет частоту колебаний.
Пример:
Определите амплитуду  циклическую частоту
циклическую частоту  период
период  и начальную фазу
и начальную фазу  колебаний тела массой
колебаний тела массой  г подвешенного к вертикальной пружине (рис. 9). Известно, что в состоянии покоя тело растягивает пружину на расстояние
г подвешенного к вертикальной пружине (рис. 9). Известно, что в состоянии покоя тело растягивает пружину на расстояние  мм и для возбуждения колебаний его смещают вниз на расстояние
мм и для возбуждения колебаний его смещают вниз на расстояние  мм от положения равновесия и отпускают.
мм от положения равновесия и отпускают.
Дано:
Решение
Циклическая частота колебаний вертикального пружинного маятника так же, как и горизонтального, определяется по формуле (см. пример 1):

Для нахождения жесткости к пружины запишем условие равновесия тела:
По закону Гука
В проекции на ось  условие равновесия запишется:
условие равновесия запишется:
Отсюда для циклической частоты  получаем:
получаем:

Амплитуда колебаний маятника определяется начальным смешением:

Период колебаний находим из соотношения:
Поскольку в начальный момент времени тело было смещено на максимальную величину, то начальная фаза колебаний 
Ответ: 
Подробное объяснение пружинного и математического маятника
Второй закон Ньютона (основной закон динамики): ускорение, приобретаемое материальной точкой, прямо пропорционально равнодействующей всех сил, действующих на нее, и обратно пропорционально массе материальной точки:
Закон Гука: модуль силы упругости  возникающей в теле при упругих деформациях, прямо пропорционален его абсолютному удлинению (сжатию)
возникающей в теле при упругих деформациях, прямо пропорционален его абсолютному удлинению (сжатию) 

где k — жесткость тела,  — длина недеформированного тела, l — длина деформированного тела.
— длина недеформированного тела, l — длина деформированного тела.
Простейшая колебательная система может быть получена с использованием груза и пружины.
Прикрепим груз массой m, лежащий на гладкой горизонтальной поверхности, к невесомой упругой пружине жесткостью k, второй конец которой зафиксирован (рис. 181). Такая система называется пружинным маятником.
Запишем второй закон Ньютона для этой системы

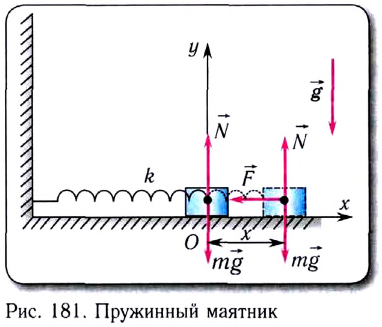
В проекции на ось Ох с учетом закона Гука получаем
 или
или
Запишем это уравнение в форме, аналогичной уравнению движения гармонического осциллятора:
Сравнивая полученное выражение с уравнением гармонических колебаний
находим циклическую частоту колебаний пружинного маятника
Тогда период колебаний пружинного маятника можно найти по формуле
Свойство независимости периода колебаний маятника от амплитуды, открытое Галилеем, называется изохронностью (от греческих слов  — равный и
— равный и  — время).
— время).
Как видим, пружинный маятник обладает свойством изохронности, поскольку период его колебаний не зависит от амплитуды.
Одной из наиболее распространенных колебательных систем является математический маятник.
Математическим маятником называется материальная точка массой m, подвешенная на невесомой нерастяжимой нити длиной l в поле каких-либо сил, например силы тяжести Земли (рис. 182).
Галилео Галилей экспериментально установил, что период колебаний математического маятника в поле силы тяжести не зависит от его массы и амплитуды колебаний (угла начального отклонения). Он установил также, что период колебаний прямо пропорционален 
Период малых колебаний математического маятника в поле силы тяжести Земли определяется по формуле Гюйгенса:
При углах отклонения математического маятника  погрешность формулы Гюйгенса не превышает 1 %.
погрешность формулы Гюйгенса не превышает 1 %.
Отклонение маятника от положения равновесия будем характеризовать углом  который нить образует с вертикалью.
который нить образует с вертикалью.
Из второго закона Ньютона следует (см. рис. 182):
Смещение маятника вдоль дуги  где угол
где угол  выражен в радианах.
выражен в радианах.
Возвращающей силой в данном случае является проекция на касательную к дуге силы тяжести  (см. рис. 182), которая определяется по формуле
(см. рис. 182), которая определяется по формуле
Заметим, что при малых углах  длина дуги АВ = х =
длина дуги АВ = х =  очень мало отличается от длины хорды
очень мало отличается от длины хорды  так как при малых
так как при малых 
Для небольших углов (до 10°) значения  различаются меньше чем на 1 %. Поэтому для таких углов равенство
различаются меньше чем на 1 %. Поэтому для таких углов равенство
 является очень хорошим приближением.
является очень хорошим приближением.
Используя полученное соотношение между координатой х и углом  находим
находим  Подставляем его в выражение для проекции силы:
Подставляем его в выражение для проекции силы:
Таким образом, уравнение движения маятника запишется в виде 
Поскольку полученное уравнение совпадает с уравнением гармонических колебаний  то можно сделать вывод, что при малых отклонениях маятник совершает гармонические колебания с циклической частотой
то можно сделать вывод, что при малых отклонениях маятник совершает гармонические колебания с циклической частотой

Как видно из этой формулы, циклическая частота не зависит от массы маятника и амплитуды его колебаний, а определяется только его длиной и ускорением свободного падения.
В общем случае, когда маятник находится в однородных полях нескольких сил, для определения периода колебаний следует ввести «эффективное ускорение»  характеризующее результирующее действие этих полей, и период колебаний маятника будет определяться по формуле
характеризующее результирующее действие этих полей, и период колебаний маятника будет определяться по формуле
Математический и пружинный маятники и энергия колебаний
Колебательные движения очень разнообразны. При этом существует «классика» колебательных движений — они описаны сотни лет назад, их изучением занимались Галилео Галилей (1564– 1642) и Христиан Гюйгенс (1629–1695). Это колебания пружинного и математического маятников.
Колебания пружинного маятника
Пружинный маятник — это колебательная система, представляющая собой закрепленное на пружине тело.
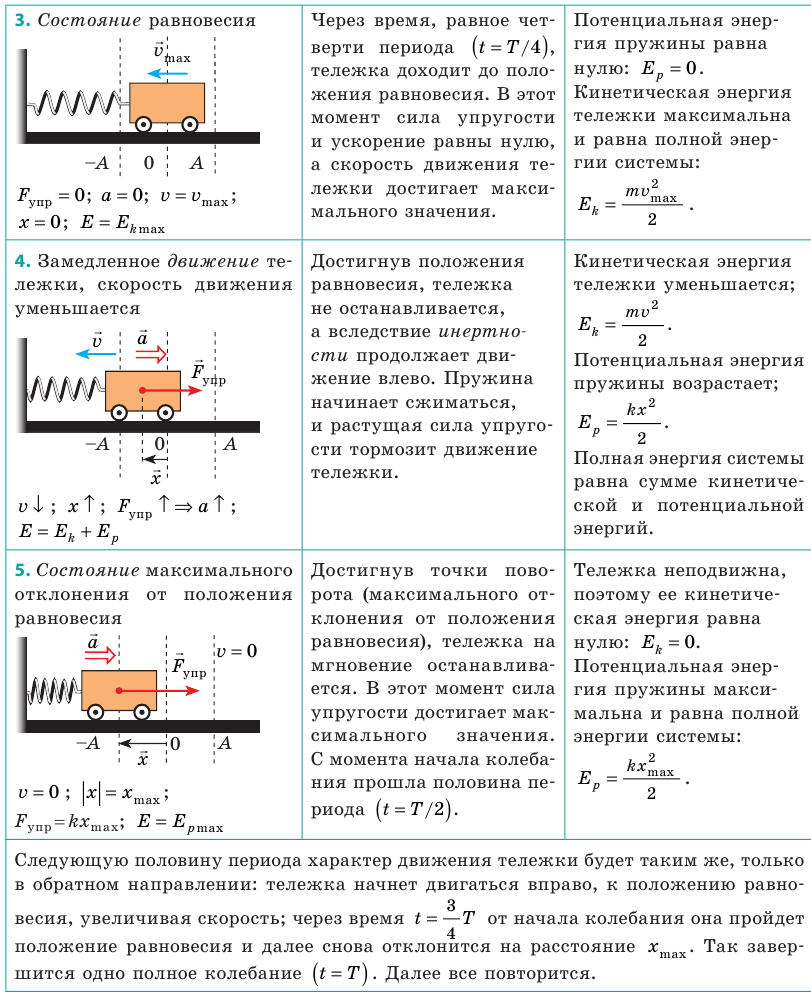
Рассмотрим колебания горизонтального пружинного маятника — тележки массой m, закрепленной на пружине жесткостью k. Будем считать, что силы трения, действующие в системе, пренебрежимо малы, а значит, колебания маятника незатухающие (их амплитуда с течением времени не изменяется, а полная механическая энергия системы сохраняется). При этом потенциальная энергия деформированной пружины будет превращаться в кинетическую энергию движения тележки, и наоборот.
Колебания пружинного маятника:
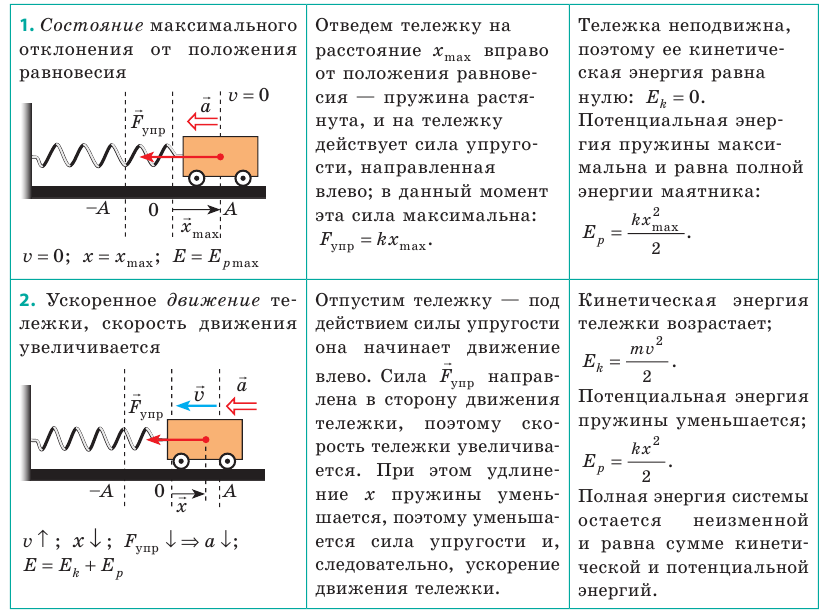
Обратите внимание! В течение всего времени колебания сила упругости направлена в сторону, противоположную смещению тележки, — сила упругости все время «толкает» тележку к положению равновесия.
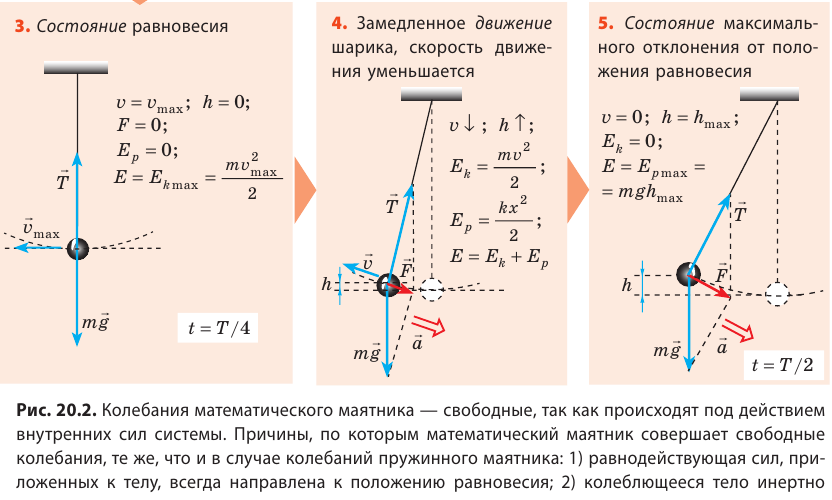
Итак, причины свободных колебаний пружинного маятника: 1) действующая на тело сила всегда направлена к положению равновесия; 2) колеблющееся тело инертно, поэтому оно не останавливается в положении равновесия (когда равнодействующая сил становится равной нулю), а продолжает движение в том же направлении.
Как вычислить период колебаний пружинного маятника
Рассмотрим колебания тележки, закрепленной на горизонтальной пружине, с точки зрения второго закона Ньютона (рис. 20.1). Запишем уравнение второго закона Ньютона в векторном виде: 
Сила тяжести и сила нормальной реакции опоры уравновешивают друг друга, поэтому  . Спроецировав это уравнение на ось ОХ
. Спроецировав это уравнение на ось ОХ  и воспользовавшись законом Гука
и воспользовавшись законом Гука  получим:
получим:  .
.
Последнее уравнение можно записать в виде  Таким образом, колебания тележки на пружине являются гармоническими колебаниями, а циклическая частота этих колебаний равна:
Таким образом, колебания тележки на пружине являются гармоническими колебаниями, а циклическая частота этих колебаний равна: 
Приняв во внимание, что  , получим формулу для вычисления периода колебаний пружинного маятника:
, получим формулу для вычисления периода колебаний пружинного маятника:
Обратите внимание! Период колебаний пружинного маятника не зависит ни от амплитуды колебаний, ни от места расположения маятника (на поверхности Земли или Луны, в космическом корабле и т. д.), — он определяется только характеристиками самой колебательной системы «тело — пружина». Если период Т колебаний тела и жесткость k пружины известны, можно найти массу m тела. Такой способ определения массы используют в состоянии невесомости, когда обычные весы не работают.
Что называют математическим маятником
Любое твердое тело, которое совершает или может совершать колебания относительно оси, проходящей через точку подвеса, называют физическим маятником. Примером может быть игрушка, подвешенная на нити в салоне автомобиля. Если игрушку вывести из положения равновесия, она начнет колебаться. Однако изучать такие колебания сложно: их характер определяется размерами и формой игрушки, свойствами нити и другими факторами.
Чтобы размеры тела не влияли на характер его колебаний, следует взять нить, длина которой намного больше размеров тела, а масса незначительна по сравнению с его массой. В таком случае тело можно считать материальной точкой. А чтобы во время колебаний тело все время находилось на одинаковом расстоянии от точки подвеса, нить должна быть нерастяжимой. Таким образом будет получена физическая модель — математический маятник.
Математический маятник — это физическая модель колебательной системы, состоящая из материальной точки, подвешенной на невесомой и нерастяжимой нити, и гравитационного поля.
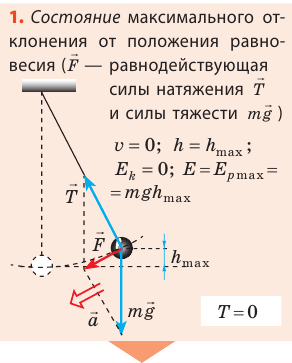
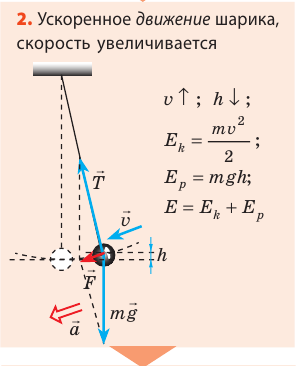
Колебания математического маятника
Возьмем небольшой, но достаточно тяжелый шарик и подвесим его на длинной нерастяжимой нити — такой маятник можно считать математическим. Если отклонить шарик от положения равновесия и отпустить, то в результате действия гравитационного поля Земли (силы тяжести) и силы натяжения нити шарик начнет колебаться около положения равновесия. Поскольку сопротивление воздуха пренебрежимо мало, а силы, действующие в системе, являются консервативными, полная механическая энергия шарика будет сохраняться: потенциальная энергия шарика будет превращаться в его кинетическую энергию, и наоборот.
Рассмотрите колебательное движение шарика (рис. 20.2). Объясните причины его движения. Какие происходят превращения энергии?
Как вычислить период колебаний математического маятника
Математический маятник, отклоненный от положения равновесия на небольшой угол (3–5°), будет совершать гармонические колебания, то есть ускорение его движения все время будет прямо пропорционально смещению и направлено в сторону, противоположную смещению: 
Для математического маятника:  . Поскольку
. Поскольку  , имеем формулу для периода колебаний математического маятника:
, имеем формулу для периода колебаний математического маятника:
где l — длина маятника; g — ускорение свободного падения.
Данную формулу впервые получил в XVII в. голландский ученый Христиан Гюйгенс, поэтому ее называют формулой Гюйгенса.
Период колебаний математического маятника не зависит от массы маятника, а определяется только длиной нити и ускорением свободного падения в том месте, где расположен маятник. Поэтому, измерив длину нити и период колебаний маятника, можно определить ускорение свободного падения в данной местности.
Пример:
Уравнение колебаний груза массой 1 кг на пружине имеет вид: (cм). Найдите полную механическую энергию колебаний; наибольшую скорость груза; кинетическую и потенциальную энергии системы через
(cм). Найдите полную механическую энергию колебаний; наибольшую скорость груза; кинетическую и потенциальную энергии системы через  с после начала отсчета времени. Трением пренебречь.
с после начала отсчета времени. Трением пренебречь.
Решение:
Трение отсутствует, поэтому полная механическая энергия сохраняется:

Сравним уравнение колебаний в общем виде с уравнением, приведенным в задаче:

Поскольку

Определив удлинение пружины через , вычислим потенциальную и кинетическую энергии пружины:
, вычислим потенциальную и кинетическую энергии пружины: 

Выводы:
- Скалярные и векторные величины и действия над ними
- Проекция вектора на ось
- Путь и перемещение
- Равномерное прямолинейное движение
- Вращательное движение тела
- Равномерное движение материальной точки по окружности
- Колебательное движение
- Физический и математический маятники
|
Груз, подвешенный на нити, колеблющийся в поле тяжести Земли, а также груз, прикрепленный к пружине — примеры наиболее простых механических колебательных систем. Рассмотрим физические процессы, происходящие в таких системах. |
![]()
Совокупность нескольких тел образуют механическую систему. Тела, не входящие в систему, называются внешними.
Второй закон Ньютона (основной закон динамики): ускорение, приобретаемое телом под действием приложенных к нему сил, обратно пропорционально массе тела, направлено по результирующей этих сил и прямо пропорционально ее модулю:
Закон Гука: при упругих деформациях сжатия и растяжения модуль силы упругости прямо пропорционален модулю изменения длины тела:
![]()
где k — жесткость тела, ![]() — длина недеформированного тела, l — длина деформированного тела. Направление силы упругости всегда противоположно направлению смещения при деформации.
— длина недеформированного тела, l — длина деформированного тела. Направление силы упругости всегда противоположно направлению смещения при деформации.
Какие условия необходимы для возникновения колебаний?
Результаты опытов показывают, что для возникновения и существования механических колебаний тело изначально необходимо привести в движение. Это можно сделать, отклоняя его от положения равновесия или придавая ему начальную скорость посредством толчка. Этим отклонением или толчком определяется амплитуда колебаний. Кроме того, при выведении тела из положения равновесия в колеблющейся системе должна возникать результирующая сила, стремящаяся возвратить тело в положение равновесия.
Простейшая колебательная система, состоящая из тела с прикрепленной к нему пружиной, связывающей тело и опору, называется пружинным маятником. Пружина может располагаться как горизонтально (горизонтальный пружинный маятник), так и вертикально (вертикальный пружинный маятник).
Рассмотрим колебания горизонтального пружинного маятника.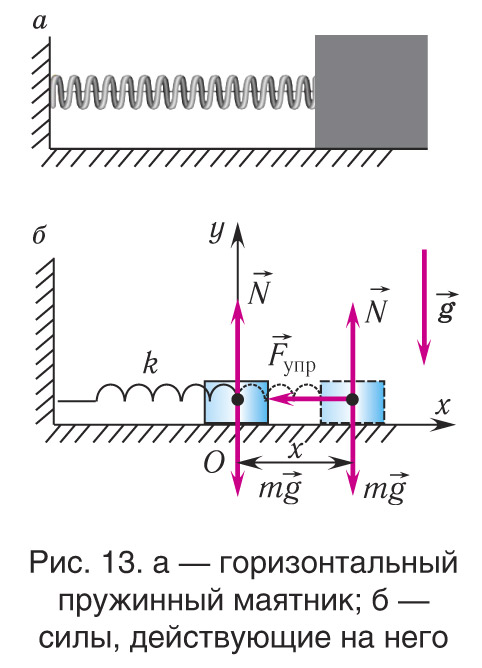
Пусть тело массой m, лежащее на гладкой горизонтальной поверхности, прикреплено к свободному концу невесомой пружины жесткостью k (рис. 13, а). Второй конец пружины прикреплен к неподвижной опоре. Выведем тело из положения равновесия, сместив его, например, вправо на расстояние x (см. рис. 13, б). При этом согласно закону Гука возникнет сила упругости ![]() приложенная к телу и направленная влево.
приложенная к телу и направленная влево.
Согласно второму закону Ньютона будет выполняться равенство:
|
|
(1) |
С учетом закона Гука из (1) получаем уравнение для проекций величин на ось Ox (см. рис. 13, б):
|
|
(2) |
Согласно (2) ускорение тела массой m пропорционально действующей силе и направлено к положению равновесия. При этом возникают колебания тела. Каждые полпериода направление движения меняется на противоположное. Смещение груза происходит то вправо, то влево относительно положения равновесия, т. е. оно меняет знак. Следовательно, и сила согласно (2) тоже меняет знак.
Перепишем полученное соотношение (2) в виде:
|
|
(3) |
Уравнение (3) называется уравнением гармонических колебаний пружинного маятника.
Следовательно, необходимым условием возникновения гармонических колебаний является действие возвращающей силы, направленной к положению равновесия и прямо пропорциональной смещению тела от положения равновесия. Эта возвращающая сила всегда направлена к положению равновесия, о чем «говорит» минус в уравнении (2).
В положении равновесия возвращающая сила равна нулю (![]() = 0), так как x = 0. Поэтому если в этом положении колеблющееся тело остановить, то колебания исчезнут.
= 0), так как x = 0. Поэтому если в этом положении колеблющееся тело остановить, то колебания исчезнут.
Расчеты показывают, а результаты экспериментов подтверждают, что при описанных условиях тело будет совершать колебания с периодом:
|
(4) |
С учетом того, что период связан с циклической частотой соотношением , находим:
| (5) |
Из формул (4) и (5) следует, что период и частота гармонических колебаний пружинного маятника определяются массой груза m и жесткостью пружины k и не зависят от амплитуды его колебаний.
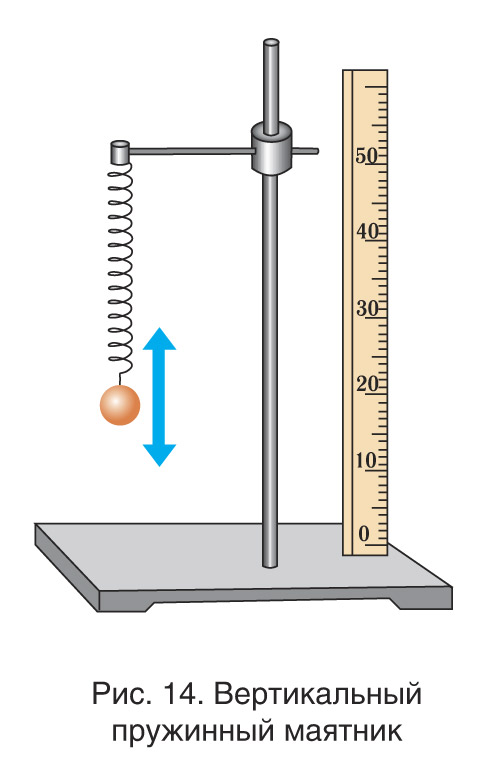
Отметим, что период и циклическая частота колебаний вертикального пружинного маятника (рис. 14) также определяются по формулам (4) и (5).
Одной из наиболее распространенных колебательных систем является математический маятник.
Математическим маятником называется небольшое тело массой m, подвешенное на невесомой нерастяжимой нити длиной l, находящееся в поле силы тяжести (рис. 15).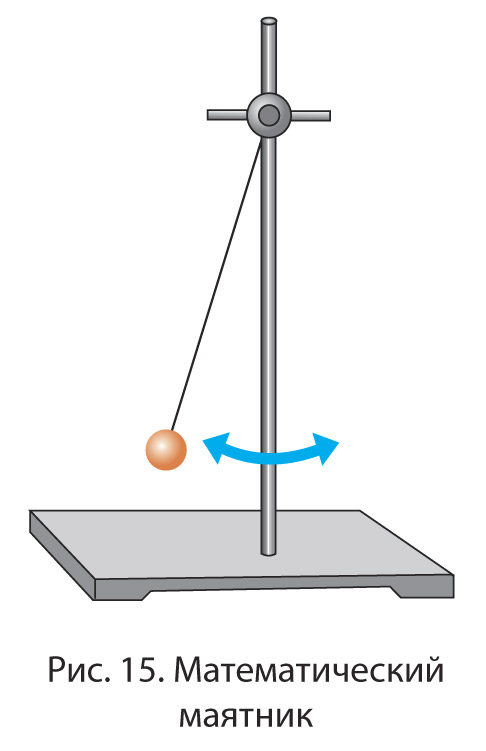
Рассмотрим колебания математического маятника.
Отклонение маятника от положения равновесия будем характеризовать углом α (рис. 16), который нить образует с вертикалью. После отклонения маятника от положения равновесия на него действуют две силы: направленная вертикально вниз сила тяжести ![]() и направленная вдоль нити сила упругости
и направленная вдоль нити сила упругости . Под действием этих сил тело движется ускоренно к положению равновесия (точка B). Пройдя точку B, тело продолжает двигаться, но его скорость постепенно уменьшается, обращаясь в нуль в точке, симметричной точке А относительно вертикали. После этого оно начинает двигаться обратно к точке B.
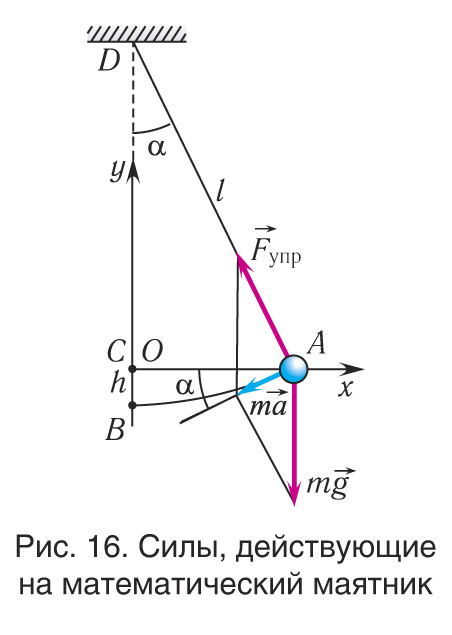
Согласно второму закону Ньютона для движения маятника можем записать:
| (6) |
В проекциях на выбранные оси координат Ox и Oy (см. рис. 16) получаем:
| (7) |
| (8) |
Поскольку при малых углах отклонения длина дуги АВ ≈ х, то из ΔAOD находим:
,
где х — отклонение маятника от положения равновесия, l — длина маятника. Подставляя выражение для синуса в (7), получим:
| (9) |
Таким образом, силой, возвращающей маятник к устойчивому положению равновесия при колебаниях, являются силы упругости его нити и силы тяжести.
При малых углах отклонения маятника проекция вектора ускорения и ей можно пренебречь, а
![]() , тогда из уравнения (8) следует
, тогда из уравнения (8) следует ![]() Следовательно, уравнение движения маятника вдоль оси Ox запишется в виде:
Следовательно, уравнение движения маятника вдоль оси Ox запишется в виде:
где ![]() — проекция ускорения, сообщаемого грузу маятника силой упругости нити.
— проекция ускорения, сообщаемого грузу маятника силой упругости нити.
Откуда получаем уравнение колебаний математического маятника:
|
|
(10) |
Сравнивая соотношения (10), (3) и (5), легко получить формулу для циклической частоты математического маятника в поле тяжести Земли:
| (11) |
Период малых колебаний математического маятника в поле тяжести Земли определяется по формуле Гюйгенса:
|
(12) |

Используя соотношения (5) и (11), уравнение колебаний пружинного маятника и математического маятника
![]() можно записать в одинаковом виде:
можно записать в одинаковом виде:
|
(13) |
Таким образом, зависимости координат от времени x(t), описываемые уравнениями (5) и (6) из § 1, удовлетворяют уравнению (13), которое называется уравнением гармонических колебаний.
Как видно из формул (11), (12), период и циклическая частота малых колебаний математического маятника не зависят от массы маятника и амплитуды его колебаний, а определяются только его длиной и ускорением свободного падения.
Галилео Галилей первый экспериментально определил, что период малых колебаний () математического маятника длиной l в поле силы тяжести не зависит от его массы m и амплитуды колебаний (угла начального отклонения a).
Одним из важнейших достижений Х. Гюйгенса было изобретение часов с маятником. Он запатентовал свое изобретение 16 июля 1657 г. В 1673 г. вышло в свет его сочинение «Маятниковые часы», в котором были изложены теоретические основы его изобретения. Именно постоянство периода (частоты) колебаний маятника позволило использовать его для создания часов.
Если маятник приобретает дополнительное ускорение , обусловленное, например, ускоренным движением точки подвеса, то при этом будет изменяться сила упругости нити. В таком случае период колебаний маятника будет определяться по формуле:
где — «эффективное ускорение», равное векторной разности
.
Повышенный интерес к гармоническим колебаниям объясняется тем, что они широко распространены в науке и технике (маятники, музыкальные инструменты, свет, переменные токи и т. д.). Кроме того, гармонические колебания имеют простое математическое описание, а их период не зависит от амплитуды. Подчеркнем, что любое периодическое движение можно рассматривать как результат наложения простых гармонических составляющих.
Свойство независимости периода колебаний маятника от амплитуды называется изохронностью (от греческих слов εσος (изос) — равный и χρονος (хронос) — время). Следовательно, колебания пружинного маятника обладают свойством изохронности. Изохронность колебаний маятника была открыта Галилео Галилеем в 1583 г. при изучении движения груза, подвешенного на нити.
|
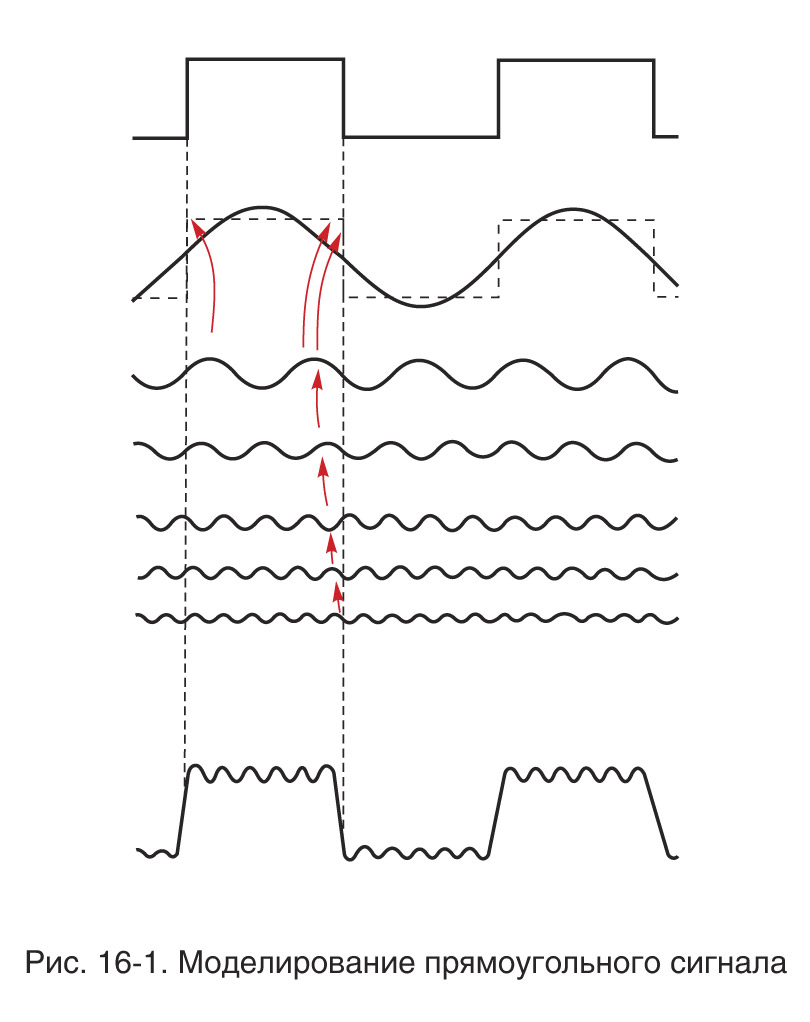
В 1807 г. французский физик Жан Батист Жозеф Фурье (1768—1830) показал, что любой периодический процесс, каким бы сложным он ни был, может быть разложен на составляющие его гармонические сигналы. В качестве примера приведем моделирование прямоугольного сигнала в виде суммы гармонических сигналов с кратными частотами в отношении 1:3:5:7…. (рис. 16-1). Чем больше сигналов разных частот складываются, тем точнее форма конечного сигнала будет соответствовать исходной прямоугольного сигнала. Сигналы прямоугольной формы широко используются для проверки динамиков, микрофонов. |
 |
Вопросы к параграфу
![]()
1. Какой маятник называют пружинным? Запишите кинематический закон движения пружинного маятника.
2. По какой формуле определяется циклическая частота колебаний пружинного маятника? Период его колебаний?
3. Изменится ли период колебаний пружинного маятника, если его «перенести» с поверхности Земли на поверхность Луны? Привести в состояние невесомости?
4. Какой маятник называют математическим? Запишите кинематический закон движения математического маятника.
5. Как направлена равнодействующая сил, приложенных к грузу маятника, в моменты, когда он находится в крайних положениях? Когда проходит через положение равновесия?
6. Маятниковые часы спешат. Как надо изменить длину подвеса, чтобы они шли точно?
7. Каким образом, используя математический маятник, можно определить ускорение свободного падения в данном месте?
8. Влияет ли изменение температуры на точность хода маятниковых часов?
Примеры решения задач
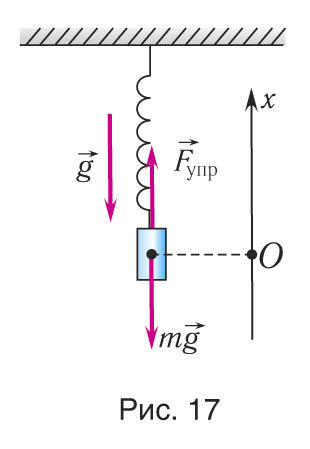
1. Определите циклическую частоту и период T колебаний тела, массой m = 500 г, прикрепленного к вертикальной пружине (рис. 17). Известно, что в состоянии покоя тело растягивает пружину на расстояние х0 = 10 мм и для возбуждения колебаний его смещают вниз на расстояние х = 30 мм и отпускают.
Дано:
m = 500 г = 0,500 кг
х = 30 мм = 3,0 · 10−2 м
х0 = 10 мм = 1,0 · 10−2 м
– ?, T – ?
Решение
Циклическая частота колебаний вертикального пружинного маятника, так же как и горизонтального, определяется по формуле:
Найдем жесткость k пружины. Из условия равновесия тела следует:
По закону Гука в проекции на ось Ох имеем:
Тогда в проекции на ось Ox условие равновесия запишется:
Отсюда для циклической частоты получаем:
Период колебаний находим из соотношения:
Ответ: .
2. Выведите формулу для периода T колебаний вертикального пружинного маятника, если масса груза m и жесткость пружины k.
Решение
Рассмотрим вертикальное движение груза, происходящее под действием силы упругости пружины и силы тяжести груза после толчка (рис. 17-1). Начало координат поместим в точку, соответствующую равновесному положению тела (рис. 17-2). В этом положении пружина растянута на величину , определяемую соотношением:
| (1) |
При смещении груза на величину x из положения равновесия сила, действующая со стороны пружины на груз, равна .
Тогда по второму закону Ньютона
С учетом соотношения (1) это уравнение перепишем в виде:
Если ввести обозначение , то уравнение движения груза запишется в виде:
Оно описывает гармонические колебания вертикального пружинного маятника с частотой такой же, как у горизонтального пружинного маятника. Следовательно, период колебаний вертикального пружинного маятника определяется по такой же формуле, как и горизонтального. Это подтверждается и записью осциллограммы колебаний вертикального пружинного маятника (рис. 17-1):
Ответ: . Таким образом, действующая в колебательной системе постоянная сила только смещает положения равновесия, но не изменяет частоту колебаний.
Упражнение 2
1. Определите период Т и частоту колебаний груза массой m = 200 г, подвешенного на пружине жесткостью
2. Определите длину l математического маятника вблизи поверхности Земли, если частота его колебаний = 1,0 Гц.
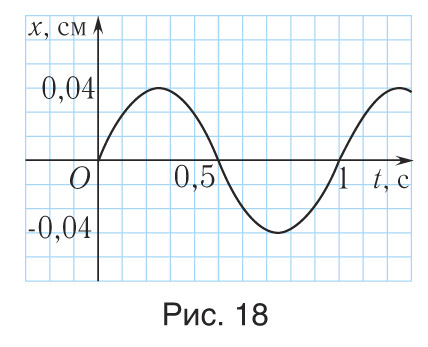
3. Определите жесткость k пружины маятника массой m = 400 г, совершающего колебания, представленные на рисунке 18.
4. Груз, подвешенный к пружине, вызывает ее удлинение на величину Δl. Определите Δl пружины, если циклическая частота вертикальных колебаний такой системы
5. Два тела с одинаковыми массами подвешены к двум одинаковым пружинам. Тела смещают вниз: одно на расстояние x1 = 10 см, другое — на расстояние х2 = 20 см от положения равновесия, затем одновременно отпускают. Какое из них первым пройдет положение равновесия?
6. Один математический маятник совершил за некоторое время N1= 20 колебаний, а второй за то же время совершил N2 = 16 колебаний. Определите длину l2 второго маятника, если известно, что разность длин маятников Δl = 10 см.
7. Период малых колебаний математического маятника на поверхности Земли равен Т = 0,80 с. Каким будет период Т1 его колебаний на поверхности Марса, если ускорение свободного падения gм = 0,37g3?
8. Определите длину l секундного маятника, установленного в Минске, где ускорение свободного падения . Найдите относительную погрешность расчета, в котором ускорение свободного падения было бы принято равным
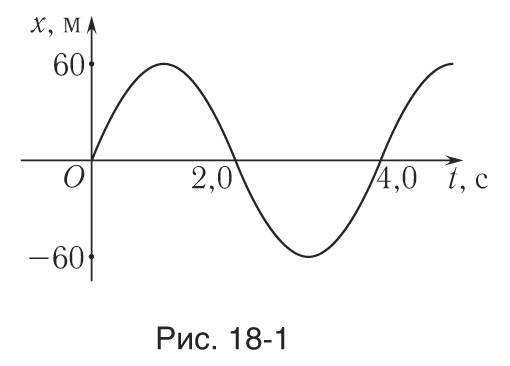
9.* Определите длину l математического маятника, совершающего колебания, представленные на рисунке 18-1.
10.* На пружине колеблется груз с частотой = 0,620 Гц. Когда к нему прикрепили дополнительный груз массой
, частота колебаний стала
1 = 480 Гц . Найдите массу m начального груза
11.* Тело массой m подвешено на пружине жесткостью k. Пружину разрезали пополам и прикрепили к ее одной половине то же тело. Во сколько раз n изменилась частота колебаний этого тела?
12.* Две невесомые пружины жесткостями и
соединены один раз последовательно, другой — параллельно. Во сколько раз n будут отличаться периоды колебаний груза на таких пружинах?
Механические колебания.
-
Гармонические колебания.
-
Уравнение гармонических колебаний.
-
Пружинный маятник.
-
Математический маятник.
-
Свободные и вынужденные колебания.
Автор — профессиональный репетитор, автор учебных пособий для подготовки к ЕГЭ Игорь Вячеславович Яковлев
Темы кодификатора ЕГЭ : гармонические колебания; амплитуда, период, частота, фаза колебаний; свободные колебания, вынужденные колебания, резонанс.
Колебания – это повторяющиеся во времени изменения состояния системы. Понятие колебаний охватывает очень широкий круг явлений.
Колебания механических систем, или механические колебания – это механическое движение тела или системы тел, которое обладает повторяемостью во времени и происходит в окрестности положения равновесия. Положением равновесия называется такое состояние системы, в котором она может оставаться сколь угодно долго, не испытывая внешних воздействий.
Например, если маятник отклонить и отпустить, то начнутся колебания. Положение равновесия – это положение маятника при отсутствии отклонения. В этом положении маятник, если его не трогать, может пребывать сколь угодно долго. При колебаниях маятник много раз проходит положение равновесия.
Сразу после того, как отклонённый маятник отпустили, он начал двигаться, прошёл положение равновесия, достиг противоположного крайнего положения, на мгновение остановился в нём, двинулся в обратном направлении, снова прошёл положение равновесия и вернулся назад. Совершилось одно полное колебание. Дальше этот процесс будет периодически повторяться.
Амплитуда колебаний тела – это величина его наибольшего отклонения от положения равновесия.
Период колебаний  – это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды.
– это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды.
Частота колебаний  – это величина, обратная периоду:
– это величина, обратная периоду:  . Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
. Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
к оглавлению ▴
Гармонические колебания.
Будем считать, что положение колеблющегося тела определяется одной-единственной координатой  . Положению равновесия отвечает значение
. Положению равновесия отвечает значение  . Основная задача механики в данном случае состоит в нахождении функции
. Основная задача механики в данном случае состоит в нахождении функции ") , дающей координату тела в любой момент времени.
, дающей координату тела в любой момент времени.
Для математического описания колебаний естественно использовать периодические функции. Таких функций много, но две из них – синус и косинус – являются самыми важными. У них много хороших свойств, и они тесно связаны с широким кругом физических явлений.
Поскольку функции синус и косинус получаются друг из друга сдвигом аргумента на  , можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
, можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
Гармонические колебания – это колебания, при которых координата зависит от времени по гармоническому закону:
") (1)
(1)
Выясним смысл входящих в эту формулу величин.
Положительная величина  является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому – амплитуда колебаний.
является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому – амплитуда колебаний.
Аргумент косинуса  называется фазой колебаний. Величина
называется фазой колебаний. Величина  , равная значению фазы при
, равная значению фазы при  , называется начальной фазой. Начальная фаза отвечает начальной координате тела:
, называется начальной фазой. Начальная фаза отвечает начальной координате тела:  .
.
Величина называется  циклической частотой. Найдём её связь с периодом колебаний и частотой
циклической частотой. Найдём её связь с периодом колебаний и частотой  . Одному полному колебанию отвечает приращение фазы, равное
. Одному полному колебанию отвечает приращение фазы, равное  радиан:
радиан:  , откуда
, откуда
 (2)
(2)
 (3)
(3)
Измеряется циклическая частота в рад/с (радиан в секунду).
В соответствии с выражениями (2) и (3) получаем ещё две формы записи гармонического закона (1):
, x=Acos(2 pi nu t + alpha)") .
.
График функции (1), выражающей зависимость координаты от времени при гармонических колебаниях, приведён на рис. 1.
 |
| Рис. 1. График гармонических колебаний |
Гармонический закон вида (1) носит самый общий характер. Он отвечает, например, ситуации, когда с маятником совершили одновременно два начальных действия: отклонили на величину  и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.
и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.
Пусть маятник отклонили, но начальной скорости не сообщали (отпустили без начальной скорости). Ясно, что в этом случае  , поэтому можно положить
, поэтому можно положить  . Мы получаем закон косинуса:
. Мы получаем закон косинуса:
 .
.
График гармонических колебаний в этом случае представлен на рис. 2.
 |
| Рис. 2. Закон косинуса |
Допустим теперь, что маятник не отклоняли, но ударом сообщили ему начальную скорость из положения равновесия. В этом случае  , так что можно положить
, так что можно положить  . Получаем закон синуса:
. Получаем закон синуса:
 .
.
График колебаний представлен на рис. 3.
 |
| Рис. 3. Закон синуса |
к оглавлению ▴
Уравнение гармонических колебаний.
Вернёмся к общему гармоническому закону (1). Дифференцируем это равенство:
") . (4)
. (4)
Теперь дифференцируем полученное равенство (4):
") . (5)
. (5)
Давайте сопоставим выражение (1) для координаты и выражение (5) для проекции ускорения. Мы видим, что проекция ускорения отличается от координаты лишь множителем  :
:
 . (6)
. (6)
Это соотношение называется уравнением гармонических колебаний. Его можно переписать и в таком виде:
 . (7)
. (7)
C математической точки зрения уравнение (7) является дифференциальным уравнением. Решениями дифференциальных уравнений служат функции (а не числа, как в обычной алгебре).
Так вот, можно доказать, что:
-решением уравнения (7) является всякая функция вида (1) с произвольными  ;
;
-никакая другая функция решением данного уравнения не является.
Иными словами, соотношения (6), (7) описывают гармонические колебания с циклической частотой  и только их. Две константы определяются из начальных условий – по начальным значениям координаты и скорости.
и только их. Две константы определяются из начальных условий – по начальным значениям координаты и скорости.
к оглавлению ▴
Пружинный маятник.
Пружинный маятник – это закреплённый на пружине груз, способный совершать колебания в горизонтальном или вертикальном направлении.
Найдём период малых горизонтальных колебаний пружинного маятника (рис. 4). Колебания будут малыми, если величина деформации пружины много меньше её размеров. При малых деформациях мы можем пользоваться законом Гука. Это приведёт к тому, что колебания окажутся гармоническими.
Трением пренебрегаем. Груз имеет массу  , жёсткость пружины равна
, жёсткость пружины равна  .
.
Координате отвечает положение равновесия, в котором пружина не деформирована. Следовательно, величина деформации пружины равна модулю координаты груза.
 |
| Рис. 4. Пружинный маятник |
В горизонтальном направлении на груз действует только сила упругости  со стороны пружины. Второй закон Ньютона для груза в проекции на ось
со стороны пружины. Второй закон Ньютона для груза в проекции на ось  имеет вид:
имеет вид:
 . (8)
. (8)
Если  (груз смещён вправо, как на рисунке), то сила упругости направлена в противоположную сторону, и
(груз смещён вправо, как на рисунке), то сила упругости направлена в противоположную сторону, и  . Наоборот, если
. Наоборот, если  , то
, то  . Знаки и
. Знаки и  всё время противоположны, поэтому закон Гука можно записать так:
всё время противоположны, поэтому закон Гука можно записать так:

Тогда соотношение (8) принимает вид:

или
 .
.
Мы получили уравнение гармонических колебаний вида (6), в котором
 .
.
Циклическая частота колебаний пружинного маятника, таким образом, равна:
 . (9)
. (9)
Отсюда и из соотношения  находим период горизонтальных колебаний пружинного маятника:
находим период горизонтальных колебаний пружинного маятника:
 . (10)
. (10)
Если подвесить груз на пружине, то получится пружинный маятник, совершающий колебания в вертикальном направлении. Можно показать, что и в этом случае для периода колебаний справедлива формула (10).
к оглавлению ▴
Математический маятник.
Математический маятник – это небольшое тело, подвешенное на невесомой нерастяжимой нити (рис. 5). Математический маятник может совершать колебания в вертикальной плоскости в поле силы тяжести.
 |
| Рис. 5. Математический маятник |
Найдём период малых колебаний математического маятника. Длина нити равна  . Сопротивлением воздуха пренебрегаем.
. Сопротивлением воздуха пренебрегаем.
Запишем для маятника второй закон Ньютона:
 ,
,
и спроектируем его на ось :
 .
.
Если маятник занимает положение как на рисунке (т. е. ), то:
 .
.
Если же маятник находится по другую сторону от положения равновесия (т. е. ), то:
 .
.
Итак, при любом положении маятника имеем:
 . (11)
. (11)
Когда маятник покоится в положении равновесия, выполнено равенство  . При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство
. При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство  . Воспользуемся им в формуле (11):
. Воспользуемся им в формуле (11):
 ,
,
или
 .
.
Это – уравнение гармонических колебаний вида (6), в котором
 .
.
Следовательно, циклическая частота колебаний математического маятника равна:
 . (12)
. (12)
Отсюда период колебаний математического маятника:
 . (13)
. (13)
Обратите внимание, что в формулу (13) не входит масса груза. В отличие от пружинного маятника, период колебаний математического маятника не зависит от его массы.
к оглавлению ▴
Свободные и вынужденные колебания.
Говорят, что система совершает свободные колебания, если она однократно выведена из положения равновесия и в дальнейшем предоставлена сама себе. Никаких периодических внешних
воздействий система при этом не испытывает, и никаких внутренних источников энергии, поддерживающих колебания, в системе нет.
Рассмотренные выше колебания пружинного и математического маятников являются примерами свободных колебаний.
Частота, с которой совершаются свободные колебания, называется собственной частотой колебательной системы. Так, формулы (9) и (12) дают собственные (циклические) частоты колебаний пружинного и математического маятников.
В идеализированной ситуации при отсутствии трения свободные колебания являются незатухающими, т. е. имеют постоянную амплитуду и длятся неограниченно долго. В реальных колебательных системах всегда присутствует трение, поэтому свободные колебания постепенно затухают (рис. 6).
 |
| Рис. 6. Затухающие колебания |
Вынужденные колебания – это колебания, совершаемые системой под воздействием внешней силы ") , периодически изменяющейся во времени (так называемой вынуждающей силы).
, периодически изменяющейся во времени (так называемой вынуждающей силы).
Предположим, что собственная частота колебаний системы равна  , а вынуждающая сила зависит от времени по гармоническому закону:
, а вынуждающая сила зависит от времени по гармоническому закону:
=F_{0}cos omega t") .
.
В течение некоторого времени происходит установление вынужденных колебаний: система совершает сложное движение, которое является наложением выужденных и свободных колебаний. Свободные колебания постепенно затухают, и в установившемся режиме система совершает вынужденные колебания, которые также оказываются гармоническими. Частота установившихся вынужденных колебаний совпадает с частотой
вынуждающей силы (внешняя сила как бы навязывает системе свою частоту).
Амплитуда установившихся вынужденных колебаний зависит от частоты вынуждающей силы. График этой зависимости показан на рис. 7.
 |
| Рис. 7. Резонанс |
Мы видим, что вблизи частоты  наступает резонанс – явление возрастания амплитуды вынужденных колебаний. Резонансная частота приближённо равна собственной частоте колебаний системы:
наступает резонанс – явление возрастания амплитуды вынужденных колебаний. Резонансная частота приближённо равна собственной частоте колебаний системы:  , и это равенство выполняется тем точнее, чем меньше трение в системе. При отсутствии трения резонансная частота совпадает с собственной частотой колебаний,
, и это равенство выполняется тем точнее, чем меньше трение в системе. При отсутствии трения резонансная частота совпадает с собственной частотой колебаний,  , а амплитуда колебаний возрастает до бесконечности при
, а амплитуда колебаний возрастает до бесконечности при  .
.
Благодарим за то, что пользуйтесь нашими материалами.
Информация на странице «Механические колебания.» подготовлена нашими редакторами специально, чтобы помочь вам в освоении предмета и подготовке к экзаменам.
Чтобы успешно сдать нужные и поступить в высшее учебное заведение или колледж нужно использовать все инструменты: учеба, контрольные, олимпиады, онлайн-лекции, видеоуроки, сборники заданий.
Также вы можете воспользоваться другими статьями из разделов нашего сайта.
Публикация обновлена:
08.05.2023
Существуют две простые колебательные системы, которые решены и рассматриваются в школьной программе, — это пружинный и математический маятник. Рассмотрим каждую из них:
- Пружинный маятник
Пружинным маятником называется система, состоящая из тела массы  и пружины, жёсткостью
и пружины, жёсткостью (рис. 1).

Рис. 1. Пружинный маятник
Для такой системы выведены следующие соотношения:
(1)
- где
— собственная частота колебаний системы
Также можем ввести период такого маятника:
(2)
- где
— период колебаний пружинного маятника.
2. Математический маятник

Рис. 2. Математический маятник
Математическим маятником называется малое тело (материальная точка) массы  , подвешенная на нити длиной
, подвешенная на нити длиной .
Для такой системы выведены следующие соотношения:
(3)
- где
— собственная частота колебаний системы
Также можем ввести период такого маятника:
(4)
- где
— период колебаний пружинного маятника.
Вывод: реальные колебательные системы в курсе школьной физики представлены только пружинным и математическим маятником, которые описываются соотношениями (1) — (4). Достаточно определить необходимый параметр и решить систему.
Пружинный маятник .
Пружинный маятник представляет из себя груз на пружине.
(T=2 pi sqrt{dfrac{m}{k}} )
(k) – жесткость пружины маятника
(m) – масса груза
Задача 1.
Вычислить период (T) пружинного маятника, если жесткость его пружины (k=8 Н/м ), а масса его груза
(m=0,5 кг ) ,
(pi=3,14 )
Показать ответ
Показать решение
Видеорешение
Задача 2.
Вычислить период (T) пружинного маятника, если жесткость его пружины (k=81 Н/м ), а масса его груза
(m=1 кг ) ,
(pi=3,14 )
Ответ округлить до десятых
Показать ответ
Показать решение
Видеорешение
Задача 3.
Вычислить период (T) пружинного маятника, если жесткость его пружины (k=400 Н/м ), а масса его груза
(m=0,25 кг ) ,
(pi=3,14 )
Ответ округлить до сотых
Показать ответ
Показать решение
Видеорешение
Задача 4.
Найти массу груза пружинного маятника, если его период ( T=1 с )
, а коэффициент жесткости пружины ( k=400 Н/м ; )
(pi=3,14 ).
Ответ округлить до целых.
Показать ответ
Показать решение
Видеорешение
Задача 5.
Найти массу груза пружинного маятника, если его период ( T=0,3 с )
, а коэффициент жесткости пружины ( k=350 Н/м ; )
(pi=3,14 ).
Ответ округлить до десятых.
Показать ответ
Показать решение
Видеорешение
Задача 6.
Найти массу груза пружинного маятника, если его период ( T=0,07 с )
, а коэффициент жесткости пружины ( k=150 Н/м ; )
(pi=3,14 ).
Ответ округлить до сотых.
Показать ответ
Показать решение
Видеорешение
Задача 7.
Найти коэффициент жесткости пружины пружинного маятника, если его период ( T=0,07 с )
, а масса груза ( m=0,0186 кг )
(pi=3,14 ).
Ответ округлить до целых.
Показать ответ
Показать решение
Видеорешение
Задача 8.
Найти коэффициент жесткости пружины пружинного маятника, если его период ( T=0,32 с )
, а масса груза ( m=0,8 кг )
(pi=3,14 ).
Ответ округлить до целых.
Показать ответ
Показать решение
Видеорешение
Задача 9.
Найти коэффициент жесткости пружины пружинного маятника, если его период ( T=0,6 с )
, а масса груза ( m=4 кг )
(pi=3,14 ).
Ответ округлить до целых.
Показать ответ
Показать решение
Видеорешение
Задача 10.
Найти частоту колебаний ( nu ) пружинного маятника, если жесткость его пружины (k=400 Н/м ), а масса его груза
(m=0,25 кг ) ,
(pi=3,14 )
Ответ округлить до сотых
Показать ответ
Показать решение
Видеорешение
Задача 15.
Массу груза пружинного маятника увеличили в 4 раза. Во сколько раз увеличился период колебаний этого
пружинного маятника?
Показать ответ
Показать решение
Видеорешение
Задача 16.
Массу груза пружинного маятника увеличили в 25 раза. Во сколько раз увеличился период колебаний этого
пружинного маятника?
Показать ответ
Показать решение
Видеорешение
Задача 25.
Пружинный маятник совершает гармонические колебания с периодом (T_1=0,4 с. ;; )
Масса его груза (m_1=1 кг ).
В какой-то момент
к грузу пружинного маятника жестко прикрепили дополнительный груз массой (m_2=3 кг. ; )
Вычислить период колебаний пружинного маятника после присоединения дополнительного груза.
Показать ответ
Показать решение
Видеорешение
Задача 30.
Пружинный маятник совершает гармонические колебания с периодом (T_1=0,15 с. ;; )
Масса его груза (m_1= 0,6 кг ).
В какой-то момент
к грузу пружинного маятника жестко прикрепили дополнительный груз , после чего
его период стал равен (T_2=0,45 с )
Найти массу (m_2 ) дополнительного груза.
Показать ответ
Показать решение
Видеорешение
