4.1. Базовые понятия
Линейная
модель
описывает
процессы в
линейной
физической системе.
Линейная
система
вида, представленного на рис. 4.1, может
быть описана линейным
дифференциальным уравнением
 (4.1)
(4.1)
где
у(t)
– искомая функция – выходной процесс;
x(t)
– заданная функция – входной процесс;
t
– независимая переменная.
Линейным
называется
дифференциальное уравнение, коэффициенты
которого не зависят от искомой функции
у и в которое функция у и ее производные
входят линейно (в первой степени).
 Основным
Основным
свойством линейных систем является
применимостьпринципа
суперпозиции (наложения):
сумме воздействий на систему соответствует
сумма ее реакций на эти воздействия.
В
качестве примера линейной системы
рассмотрим электрическую цепь с
несколькими источниками. Токи от каждого
источника независимы, поэтому проводится
расчет токов отдельно для каждого
источника. Результирующие токи получаются
суммированием частных токов.
Принцип
суперпозиции существенно облегчает
исследование линейных систем, так как
позволяет ограничиться исследованием
объекта только по одному входу.
Линейная
стационарная модель
формируется на основе обыкновенных
дифференциальных уравнений с постоянными
коэффициентами (а0,
а1,
а2,
… , b0,
b1,
b2,
…– const).
Такая модель описывает линейную систему,
параметры
которой не зависят
от времени.
ПРИМЕР
4.1.
Моделируемый объект (оригинал)
– электрическая цепь (рис. 4.2): R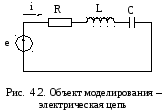 ,
,
L,
C
– const.
По
второму закону
Кирхгофа
![]() .
.
(4.2)
Выразим
ток
 (4.3)
(4.3)
и
сделаем подстановку в уравнение (4.2):

(4.4)
это
линейная
стационарная
модель
– дифференциальное уравнение 2-го
порядка относительно uC
(y→uC;
x→e).
Для
системы (рис. 4.2) можно составить еще
одну модель. Продифференцируем уравнение
(4.2):
![]() (4.5)
(4.5)
и
умножим обе части уравнения (4.5)
на С:
(4.6)
это
линейная
стационарная модель
относительно
i
(y→i;
x→e).
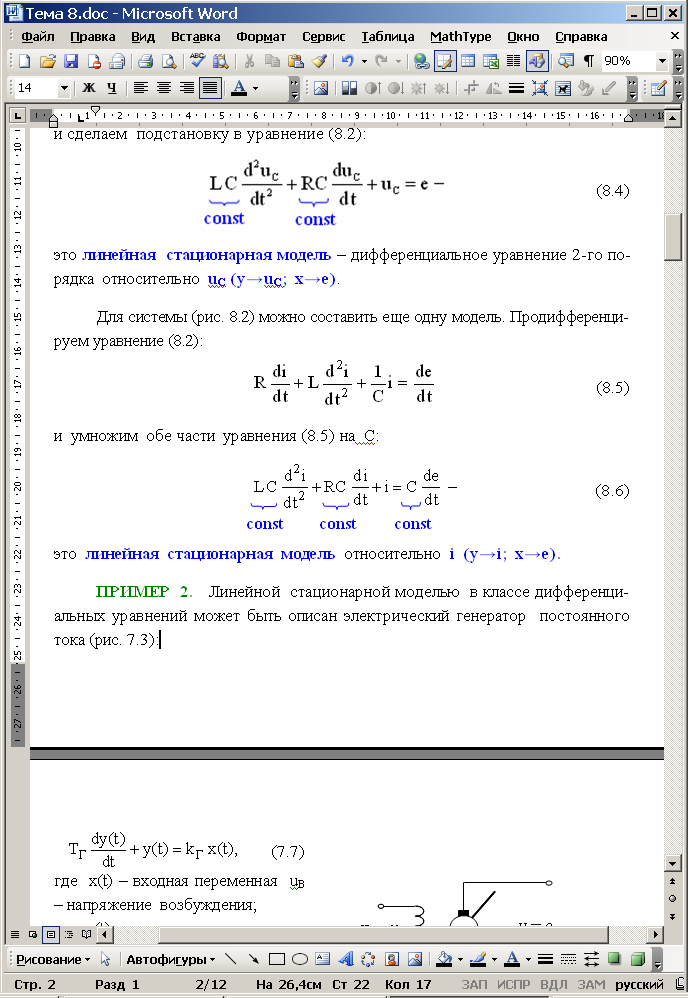
ПРИМЕР
4.2.
Линейной
стационарной моделью в классе
дифференциальных уравнений может быть
описан электрический генератор
постоянного тока (рис. 4.3):
![]() (4.7)
(4.7)
г деx(t)
деx(t)
– входная переменная uВ
– напряжение возбуждения;
у(t)
– выходная
переменная eг
–
ЭДС, наводимая в обмотке якоря
генератора;
ТГ
– постоянная времени генератора;
kГ
– передаточный
коэффициент генератора;
n
– частота вращения якоря.
Линейная
нестационарная модель
описывает
линейную систему, у которой параметры
(или хотя бы один параметр) являются
функцией времени. Такая модель может
быть представлена
линейным
дифференциальным уравнением с
коэффициентами, зависящими от времени.
ПРИМЕР
4.3.
Моделируемый
объект – электрическая цепь (рис. 4.4):
И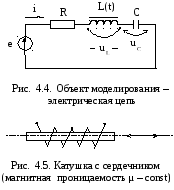 ндуктивность
ндуктивность
обеспечивается катушкой с ферромагнитным
сердечником. Сердечник периодически
перемещается вдоль оси катушки каким-либо
устройством (рис. 4.5). Перемещение
сердечника относительно катушки вызывает
изменение магнитной проводимости путей
замыкания магнитного потока катушки.
В результате изменяется потокосцепление
Ψ, т. е. Ψ(t).
Индуктивность
принято рассматривать как коэффициент
пропорциональности между потокосцеплением
Ψ и током i:
![]() ,
,
(4.8)
откуда
![]() .
.
(4.9)
Cледовательно,
L
= L(t).
(4.10)
Согласно второму
закону Кирхгофа
![]() ,
,
(4.11)
где
![]() (4.12)
(4.12)
Сделаем
подстановку соотношения (4.12)
в уравнение (4.11):
![]() (4.13)
(4.13)
Выразим
ток i
через uC:
![]() .
.
(4.14)
Сделаем
подстановку соотношения (4.14)
в уравнение (4.13):
![]() ,
,
(4.15)
получим:
 (4.16)
(4.16)
Дифференциальное
уравнение (4.16)
2-го порядка
относительно uC
представляет собой (при определенных
допущениях) нестационарную
линейную модель
(y→uC;
x→e).
Нелинейные
математические модели
формируются
на основе дифференциальных уравнений,
коэффициенты которых (или хотя бы один
коэффициент) зависят от искомой
переменной y
либо
искомая переменная
y
входит
в дифференциальное
уравнение в n-й степени (n
≠1).
Нелинейная
модель
описывает
нелинейные
системы.
Нелинейной
считается система,
которая содержит хотя бы один нелинейный
элемент.
Нелинейным
считается элемент,
параметры которого зависят от входных
и выходных сигналов.
Н елинейными
елинейными
характеристиками обладают диоды,
транзисторы, катушки с ферромагнитными
сердечниками, трансформаторы, магнитные
усилители, преобразователи и т. д.
Е сли
сли
для линейного элемента вольт-амперная
характеристика (ВАХ) представляет собой
прямую, проходящую через начало
координат
(рис. 4.6), то для нелинейного элемента
R
≠
const;
R
= R(i).
(4.17)
Примеры
ВАХ
нелинейных элементов приведены на рис.
4.7.
Нелинейная
модель
может быть
сформирована в виде нелинейного
дифференциального уравнения.
ПРИМЕР
4.4.
Моделируемый
объект – нелинейная электрическая
система (рис. 4.8): R(i)
–
нелинейный
элемент.
Аппроксимируем
ВАХ
нелинейного резистора выражением:
i
= au2.
(4.18)
Согласно
второму закону Кирхгофа
![]() .
.
(4.19)
Сделаем подстановку
выражения (4.18)
в уравнение (4.19):
![]() (4.20)
(4.20)
В
итоге получаем
 (4.21)
(4.21)
э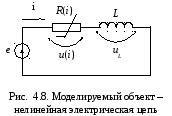 томатематическая
томатематическая
модель
в форме дифференциального уравнения
1-го порядка относительно напряжения
u,
нелинейная,
так как
один из ее коэффициентов зависит от
искомой функции
u.
При других видах
аппроксимирующего выражения получаются
другие математические модели.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
2.5. Математическая модель в виде обыкновенных дифференциальных уравнений
Математическая модель в виде одного или нескольких обыкновенных дифференциальных уравнений (ОДУ) широко используются при изучении переходных процессов в системах автоматического регулирования (САР), при описании баллистики летательных аппаратов, а также при описании процессов движения (потоки, частицы, механические элементы).
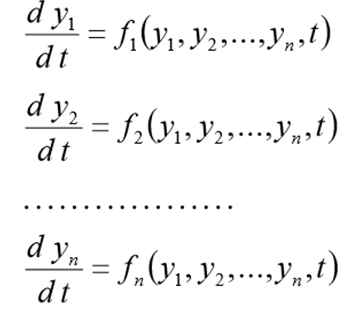
В простейшем случае модель может иметь вид линейного дифференциального уравнения n-го порядка:

или системы дифференциальных уравнений 1-го порядка


Часто встречаются смешанные задачи, а также нелинейные ОДУ.
Модель, заданная в виде дифференциальных уравнений, должна включать в себя необходимый набор начальных условий:

Рекомендуемые материалы
или x1(0) = C1, x2(0) = C2,…, xn(0) = Cn .
Исследование моделей, заданных в виде обыкновенных дифференциальных уравнений, осуществляется аналитическими и численными методами. Наиболее полными являются аналитические решения, обеспечивающие всесторонний анализ полученных результатов. Но такие решения получены лишь для ограниченного числа дифференциальных уравнений. Численные методы решения позволяют найти лишь конкретные значения изучаемой функции при заданной комбинации исходных данных. Для анализа модели можно использовать некоторую совокупность решений. Однако, очевидно, что результаты анализа в этом случае могут зависеть от выбора этой совокупности.
 |
В качестве простейшего примера математической модели механической системы может быть рассмотрена модель движения груза массой m, закрепленного на вертикальной стенке с помощью пружины жесткостью С и совершающего колебательное движение вдоль оси х в среде с вязкостью n (Рис. 2.10).
Возмущающая сила, вызывающая колебания, зависит от времени f(t). Наряду с возмущающей силой f(t) на груз действует сила инерции  , сила вязкого трения
, сила вязкого трения  , усилие пружины
, усилие пружины  . Все эти силы тормозят движение груза.
. Все эти силы тормозят движение груза.
Согласно принципу Даламбера сумма всех сил, действующих на груз должна равняться нулю:
 . (2.18)
. (2.18)
Начальные условия характеризуют начальное положение и начальную скорость груза:
x(0) = x0;  . (2.19)
. (2.19)
Уравнение (2.18) совместно с начальными условиями (2.19) представляет собой математическую модель рассматриваемой механической системы.
2.6. Модели, заданные в виде уравнений в частных производных
Ряд задач, связанных с использованием физических полей, приводит к моделям в виде дифференциальных уравнений в частных производных.
Особенностью таких задач является то, что изучаемые параметры изменяются не только во времени, но и зависят от координат x, y, z рассматриваемого пространства. Такие модели называются нестационарными. Модели, в которых параметры не зависят от времени, называются стационарными.
К таким моделям сводятся описания полей температур в элементах конструкции двигателя и полей скоростей при течении жидкости (газа). Уравнениями в частных производных описываются колебания элементов конструкции и поля напряжений, возникающих при работе этих элементов.
Линейное дифференциальное уравнение в частных производных имеет вид
 .
.
Математическая модель, описанная дифференциальными уравнениями в частных производных, должна включать в себя необходимые для решения задачи краевые условия:
1. Должна быть задана область D, ограниченная поверхностью (на плоскости – кривой) G , в которой определяется решение.
2. Должны быть заданы условия на границе G этой области.
В случае нестационарного поля эти граничные условия, так же как и сама область могут меняться во времени.
Граничные условия могут быть 1-го, 2-го и 3-го рода:
а) Граничные условия 1-го рода предусматривают задание на границе величины искомой функции:
 – для стационарного поля;
– для стационарного поля;
 – для нестационарного поля.
– для нестационарного поля.
б) Граничные условия 2-го рода – предусматривают задание производной искомой функции:
 – для стационарного поля;
– для стационарного поля;
 – для нестационарного поля.
– для нестационарного поля.
в) Граничные условия 3-го рода – предусматривают комбинации функции и ее производной:
 – для стационарного поля;
– для стационарного поля;
 – для нестационарного поля.
– для нестационарного поля.
3. Для нестационарных полей должны быть заданы одно или два начальных условия, характеризующих состояние поля в начальный момент времени:
 (i = 1, 2, 3).
(i = 1, 2, 3).
Здесь xi – координаты пространства.
Совокупность уравнений и краевых (и начальных) условий полностью определяет модель и позволяет провести ее исследование.
Решение часто задается в виде семейств изолиний F = const (Рис. 2.11).
 |
В качестве примера рассмотрим хорошо изолированный металлический пруток, нагреваемый с одной стороны. С другой стороны помещен измеритель температуры (Рис. 2.12). Величина подогрева x(t) в момент времени t является входным сигналом, а измеряемая на другом конце температура y(t) – выходным сигналом.
 Обозначим через x расстояние от измерителя до точки прутка. Температура в этой точке z будет описываться функцией вида
Обозначим через x расстояние от измерителя до точки прутка. Температура в этой точке z будет описываться функцией вида
z = z(t, x).
Уравнение теплопроводности для одномерного случая для определения функции z будет иметь вид:
 ,
,
где K – коэффициент теплопроводности.
Начальным условием в данном случае является начальное распределение температуры (при t = 0) по прутку: z(0, x) = j(x).
Граничные условия определяются двумя условиями:
а) Нагрев прутка на правом конце
 .
.
б) На левом конце подвод тепла отсутствует
 .
.
в) Показания на измерителе температур (x = 0) в момент времени t определяется следующим выражением
 .
.
Таким образом, для вычисления температуры на расстоянии L от измерителя по формуле для y(t) необходимо проинтегрировать дифференциальное уравнение с учетом начальных и граничных условий, т.е. получить функцию z(t,x). Затем следует проградуировать измеритель температуры, т.е. определить соответствие между x(t) и y(t), задавая различные значения x(t) и вычисляя  .
.
Контрольные вопросы к лекции 5
1. Где используются математические модели в виде обыкновенных дифференциальных уравнений?
2. Что должна включать в себя математическая модель в виде обыкновенных дифференциальных уравнений?
3. Какими методами осуществляется исследование моделей, заданных в виде обыкновенных дифференциальных уравнений?
4. Запишите математическую модель движения груза массой m, закрепленного на вертикальной стенке с помощью пружины жесткостью С и совершающего колебательное движение вдоль оси х в среде с вязкостью n.
5. Какой принцип используется при построении этой модели?
Кадровое, информационное, техническое и правовое обеспечение системы управления персоналом – лекция, которая пользуется популярностью у тех, кто читал эту лекцию.
6. К какому типу относится эта модель?
7. Где используются математические модели в виде дифференциальных уравнений в частных производных?
8. Что является особенностью математических моделей в виде дифференциальных уравнений в частных производных?
9. Что должна включать в себя математическая модель в виде дифференциальных уравнений в частных производных?
10. Какого типа бывают граничные условия?
11. Приведите математическую модель распределения температурного поля в металлическом прутке, нагреваемом с одной стороны.
Дифференциальные уравнения и математическое моделирование

ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ И МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
научный руководитель канд. физ.-мат. наук, проф.
Лесосибирский педагогический институт – филиал ФГАОУ «Сибирский федеральный университет»
Для изучения объектов или процессов, протекающих в окружающем нас мире, широко используются методы математического моделирования. Математические модели являются мощным средством познания окружающего мира. При этом следует заметить, что построенная математическая модель не может отразить все многообразные и сложные черты изучаемого явления. При моделировании что-то является главным, а что-то – второстепенным, чем можно пренебречь.
Изучение большого круга задач естествознания, техники и механики, биологии, медицины и других отраслей научных знаний показывает, что решение многих из них сводится к математическому моделированию процессов в виде формулы, т. е. в виде функциональной зависимости.
Так, например, некоторые процессы в радиотехнике, кинетика химических реакций, динамика биологических популяций, движение космических объектов, модели экономического развития исследуются с помощью уравнений, в которых кроме независимых переменных и неизвестных функций этих переменных, содержатся производные неизвестных функций (или их дифференциалы). Такие уравнения называются дифференциальными.
Вот почему возможности применения дифференциальных уравнений для решения задач по дисциплинам естественно – научного цикла довольно широки. Обыкновенные дифференциальные уравнения моделируют явления и процессы, которые описываются одной функцией или вектор-функцией одного переменного.
В математическое исследование любой задачи реального мира можно выделить три основных этапа:
1. построение математической модели явления;
2. изучение этой математической модели и получение решения соответствующей математической задачи;
3. приложение полученных результатов к практическому вопросу, из разрешения которого возникла данная математическая модель, и отыскание других вопросов, к которым она применима.
В таблице представлены основные области наук, в которых какое-либо явление или процесс можно записать в виде дифференциального уравнения.
Характеристика составления математической модели
Пример математической модели
1. Установить величины, изменяющиеся в данном явлении, и выявить физические законы, связывающие их.
2. Выбрать независимую переменную и функцию этой искомой переменной.
3. Исходя из условий задачи, определить начальные или краевые условия.
4. Выразить все фигурирующие в условии задачи величины через независимую переменную, искомую функцию и производные этой функции.
5. Исходя из условий задачи и физического закона, которому подчиняется данное явление, составить дифференциальное уравнение.
6. Найти общее решение или общий интеграл дифференциального уравнения.
7. По начальным или краевым условиям найти частное решение.
8. Исследовать полученное решение.
А) Первый закон Ньютона:

Б) Уравнение показательного роста и показательного убывания:

где  – некоторая константа.
– некоторая константа.
В) Уравнение гармонического колебания:

где  – положительная постоянная.
– положительная постоянная.

где  – радиус Земли,
– радиус Земли,  – расстояние между центрами метеороида и Земли,
– расстояние между центрами метеороида и Земли,  – ускорение свободного падения.
– ускорение свободного падения.
1. Сделать чертёж и ввести обозначения;
2. Отделить условия. Имеющие место в произвольной точке искомой линии, от условий, выполняющихся лишь в отдельных точках;
3. Выразить все упомянутые в задаче величины через координаты произвольной точки и через значение производной в этой точке, учитывая геометрический смысл производной;
4. По условию задачи составить дифференциальное уравнение;
5. Найти общее решение этого уравнения и получить из него с помощью начальных условий уравнение искомой линии.
Формула зеркала, собирающего все параллельные лучи в одну точку:

При создании математической модели используют физические закономерности, выявленные при экспериментальном изучении объекта моделирования. Так, например, математическая модель кровообращения основано на законах гидродинамики.
Модель хищник – жертва:

где  – положительные константы,
– положительные константы,  – число хищников,
– число хищников,  – число жертв.
– число жертв.
Сущность химических реакций сводится к разрыву связей в исходных веществах и возникновению новых связей в продуктах реакции. При этом общее число атомов каждого элемента до и после реакции остаётся постоянным.
Закон действующих масс:

где  – концентрации веществ
– концентрации веществ 

 – коэффициент пропорциональности.
– коэффициент пропорциональности.
Базовая математическая модель в области финансов формулируется в терминах стохастических процессов, приводящих, таким образом, к стохастическим дифференциальным уравнениям. Время и недостоверность являются главными элементами моделирования финансового поведения экономических агентов.
Модель фондового (биржевого) ценообразования:

где  и
и  – постоянные коэффициенты, связанные с характеристиками модели.
– постоянные коэффициенты, связанные с характеристиками модели.
Компартментальное моделирование распространено в медицине и биологии. Согласно определению американского фармаколога и биохимика Шеппарда компартмент — это некоторое количество вещества, выделяемое в биологической системе и обладающее свойством единства, поэтому в процессах транспорта и химических преобразований его можно рассматривать как целое. Например, в качестве особых компартментов рассматривают весь кислород в легких, всю углекислоту в венозной крови, количество введенного препарата в межклеточной жидкости, запас гликогена в печени и т. п. Модели, в которых исследуемая система представляется в виде совокупности компартментов, потоков вещества между ними, а также источников и стоков всех веществ, называются компартментальными.
Модель роста опухоли:

где  – концентрация опухолевых клеток,
– концентрация опухолевых клеток,  – внеклеточная матрица (например, IV тип коллагена).
– внеклеточная матрица (например, IV тип коллагена).
В заключение отметим, что математическая модель является основой математически оформленной теории того или иного явления, а аппарат дифференциальных уравнений нашел большое применение в математическом моделировании.
Результативность математического моделирования подтверждена всей человеческой практикой, это сильное средство научного исследования, которое используют в каждой конкретной области науки.
Уравнение как математическая модель в школьном курсе математики
Разделы: Математика
Класс: 9
Практически все изучаемые математическими представлениями явления и процессы в конечном итоге сводятся к нахождению решений уравнений или систем уравнений различной степени сложности. Учащиеся школ с самого начала изучения математики решают уравнения даже в самых простых ситуациях. Любая математическая задача представляет собой проблему нахождения неизвестной величины, зависящей от набора параметров с известными значениями. Простые арифметические задачи предполагают определение какого-либо значения путём выполнения основных арифметических действий с известными величинами, что означает решение уравнений.
На современном этапе развития информационных технологий с самых азов обучения совершенно необходимо развивать у обучаемых способности создавать абстрактные представления конкретных явлений и процессов в виде математических формул (по сути уравнений) с последующим определением способов вычисления значений параметров этих формул путём решения соответствующих уравнений методами программирования. То есть для решения даже самых простых задач в современных условиях надо научить школьников разрабатывать рабочие программы. Хорошо известно, что в основе разработки любой программы лежит алгоритм, моделирующий то или иное явление или процесс. Причём это заключение распространяется не только на математические области исследований, но и на все другие научные дисциплины.
Таким образом, для решения любого уравнения в самом начале надо разработать алгоритм процесса этого решения.
При разработке алгоритма решения задач прежде всего необходимо обозначить заключения и направления рассуждений, известные значения данных и искомые значения переменных, находить в базе данных признаки индивидуальные и общие, уделить достаточное внимание противопоставлению и сопоставлению фактов.
На начальном этапе изучения математических дисциплин учащимся обычно предлагаются для решения задачи в текстовом виде, преобразование условий которых в вид аналитических формул является достаточно эффективным средством для усвоения школьниками понятий, методов и даже математических теорий как строго формализованных построений. Такой приём является наиболее действенным средством развития логического мышления учеников и открывает возможности для воспитания математического восприятия изучаемых явлений и даёт возможность учащимся развивать умения и навыки применениях математики на практике [1].
На школьном этапе математического образования для большей наглядности учащимся полезно предлагать применение математического моделирования для решения задач, условия которых описывает конкретные жизненные ситуации, так как соответствующие уравнения наиболее просто ассоциировать с алгебраической или аналитической моделью изучаемых явлений. Подобные задачи позволяют, помимо перечисленного выше, усвоить учащимся понятия таких логических операций, как обобщение, классификация, анализ через синтез, сравнение, которые способствуют его развитию логического мышления.
На более поздних этапах обучения можно начинать создание математических моделей не только обычных алгебраических уравнений, а перейти к моделированию процессов, которые описываются в аналитическом виде с использованием понятий функций одной или нескольких переменных, а в выпускных классах даже дифференциальных уравнений. Наиболее интересующимся математикой ученикам можно предлагать моделировать неравенства, а также системы уравнений и системы неравенств и т.п. Таким образом, разработка математических моделей сопровождается приобретением школьниками навыков в умении перевода условий практических задач на язык алгебры или математического анализа [2, 3].
Для углубления знаний школьников полезно изучить процессы моделирования математических объектов, представленных самыми разными математическими формами, такими, как таблицы объектные и числовые, формулы числовые и буквенные, функции, уравнения алгебраические и дифференциальные и их системы, неравенства, системы неравенств, математические ряды, геометрические формы, различные схемы, диаграммы, графы и пр.
При разработках математических моделей используются алгоритмы явлений и процессов, изображаемые в виде отрезков, направленных отрезков, ломаных и кривых линий, геометрических фигур, числовых лучей, схем, значков и т.п. Такие представления алгоритмов называются блок-схемами алгоритмов. Существует перечень специальных знаков элементов блок-схем, унифицированный в математической литературе. Эти знаки обозначают постоянные параметры, переменные, базы данных, математические действия, логические операторы, последовательность и направления расчётов, функционалы и т.п. операции. Такая унификация позволяет наглядным образом представлять блок-схемы алгоритмов в виде, понятном специалистам.
Согласно [4], математическое моделирование представляет собой «способ, инструмент, научный прием изучения окружающего мира».
Как указывалось выше, этот процесс заключается в описании исследуемых явлений, процессов, объектов и систем самой разной природы на математическом языке с применением соответствующих понятий, обозначений и функционалов. При этом важно показать зависимость степени сложности разрабатываемых математических моделей от предполагаемой детализации исследования поставленной задачи, поставленной цели исследования, и, конечно же, степени математической подготовки и уровня знаний школьника о моделируемом объекте.
В самом простом виде процесс моделирования выглядит следующим образом: реальный объект замещается моделью. Затем строится алгоритм процесса или явления, на его основе разрабатывается компьютерная программа, и уже эта программа служит объектом проведения экспериментов и исследований, результаты которых ложатся в основу выводов о проведённых исследованиях самого оригинального объекта.
Очень важно показать и добиться твёрдого усвоения школьниками того факта, что математическое моделирование в определённых ситуациях является единственным способом изучения сложных объектов, аналитические представления которых не имеют числовых решений, или таких, с которыми невозможно проводить прямые эксперименты в силу их размеров (мегаобъекты и нано-объекты), невозможности или опасности последствий вмешательства в их функционирование (экономические процессы и экологические системы). Необходимо продемонстрировать возможность математического моделирования существенно сокращать время исследования реального объекта, принимая время как переменный параметр.
Кроме этого, в результате обучения ученики должны усвоить основные приёмы математического моделирования явлений, объектов и процессов, типы, этапы, классификации решаемых задач, научиться преобразовывать математические модели одного класса в модели другого класса и т.п.
В качестве примера разработки математической модели уравнения рассмотрим решение несложной алгебраической задачи согласно рекомендациям работы [5].
Задача. Необходимо определить скорость моторной лодки, если известно, что она двигалась равномерно параллельно направлению равномерного движения теплохода, при этом её скорость в три раза превышала скорость теплохода и, стартовав на один час позже теплохода с того же причала, моторная лодка за два часа пути проплыла расстояние на 24 км больше, чем теплоход.
Создадим математическую модель задачи:

Теперь осталось решить уравнение, составленное на основе математической модели:
х = 8, и скорость моторной лодки:
Ответ: скорость моторной лодки равна 24 км/ч.
Таким образом, показано практическое применение процесса решения задачи с помощью разработки математической модели движения моторной лодки и теплохода путём разработки блок-схемы алгоритма процесса, который может быть основой для написания компьютерной программы решения этой задачи при различных значениях параметров движения этих судов.
Математическая модель в виде обыкновенных дифференциальных уравнений
2.5. Математическая модель в виде обыкновенных дифференциальных уравнений
Математическая модель в виде одного или нескольких обыкновенных дифференциальных уравнений (ОДУ) широко используются при изучении переходных процессов в системах автоматического регулирования (САР), при описании баллистики летательных аппаратов, а также при описании процессов движения (потоки, частицы, механические элементы).
В простейшем случае модель может иметь вид линейного дифференциального уравнения n-го порядка:

или системы дифференциальных уравнений 1-го порядка


Часто встречаются смешанные задачи, а также нелинейные ОДУ.
Модель, заданная в виде дифференциальных уравнений, должна включать в себя необходимый набор начальных условий:

Рекомендуемые файлы
Исследование моделей, заданных в виде обыкновенных дифференциальных уравнений, осуществляется аналитическими и численными методами. Наиболее полными являются аналитические решения, обеспечивающие всесторонний анализ полученных результатов. Но такие решения получены лишь для ограниченного числа дифференциальных уравнений. Численные методы решения позволяют найти лишь конкретные значения изучаемой функции при заданной комбинации исходных данных. Для анализа модели можно использовать некоторую совокупность решений. Однако, очевидно, что результаты анализа в этом случае могут зависеть от выбора этой совокупности.

Возмущающая сила, вызывающая колебания, зависит от времени f(t). Наряду с возмущающей силой f(t) на груз действует сила инерции  , сила вязкого трения
, сила вязкого трения  , усилие пружины
, усилие пружины  . Все эти силы тормозят движение груза.
. Все эти силы тормозят движение груза.
Согласно принципу Даламбера сумма всех сил, действующих на груз должна равняться нулю:
 . (2.18)
. (2.18)
Начальные условия характеризуют начальное положение и начальную скорость груза:
x(0) = x0;  . (2.19)
. (2.19)
Уравнение (2.18) совместно с начальными условиями (2.19) представляет собой математическую модель рассматриваемой механической системы.
2.6. Модели, заданные в виде уравнений в частных производных
Ряд задач, связанных с использованием физических полей, приводит к моделям в виде дифференциальных уравнений в частных производных.
Особенностью таких задач является то, что изучаемые параметры изменяются не только во времени, но и зависят от координат x, y, z рассматриваемого пространства. Такие модели называются нестационарными. Модели, в которых параметры не зависят от времени, называются стационарными.
К таким моделям сводятся описания полей температур в элементах конструкции двигателя и полей скоростей при течении жидкости (газа). Уравнениями в частных производных описываются колебания элементов конструкции и поля напряжений, возникающих при работе этих элементов.
Линейное дифференциальное уравнение в частных производных имеет вид
 .
.
Математическая модель, описанная дифференциальными уравнениями в частных производных, должна включать в себя необходимые для решения задачи краевые условия:
1. Должна быть задана область D, ограниченная поверхностью (на плоскости – кривой) G , в которой определяется решение.
2. Должны быть заданы условия на границе G этой области.
В случае нестационарного поля эти граничные условия, так же как и сама область могут меняться во времени.
Граничные условия могут быть 1-го, 2-го и 3-го рода:
а) Граничные условия 1-го рода предусматривают задание на границе величины искомой функции:
 – для стационарного поля;
– для стационарного поля;
 – для нестационарного поля.
– для нестационарного поля.
б) Граничные условия 2-го рода – предусматривают задание производной искомой функции:
 – для стационарного поля;
– для стационарного поля;
 – для нестационарного поля.
– для нестационарного поля.
в) Граничные условия 3-го рода – предусматривают комбинации функции и ее производной:
 – для стационарного поля;
– для стационарного поля;
 – для нестационарного поля.
– для нестационарного поля.
3. Для нестационарных полей должны быть заданы одно или два начальных условия, характеризующих состояние поля в начальный момент времени:
 (i = 1, 2, 3).
(i = 1, 2, 3).
Здесь xi – координаты пространства.
Совокупность уравнений и краевых (и начальных) условий полностью определяет модель и позволяет провести ее исследование.
Решение часто задается в виде семейств изолиний F = const (Рис. 2.11).

В качестве примера рассмотрим хорошо изолированный металлический пруток, нагреваемый с одной стороны. С другой стороны помещен измеритель температуры (Рис. 2.12). Величина подогрева x(t) в момент времени t является входным сигналом, а измеряемая на другом конце температура y(t) – выходным сигналом.
 Обозначим через x расстояние от измерителя до точки прутка. Температура в этой точке z будет описываться функцией вида
Обозначим через x расстояние от измерителя до точки прутка. Температура в этой точке z будет описываться функцией вида
Уравнение теплопроводности для одномерного случая для определения функции z будет иметь вид:
 ,
,
где K – коэффициент теплопроводности.
Начальным условием в данном случае является начальное распределение температуры (при t = 0) по прутку: z(0, x) = j(x).
Граничные условия определяются двумя условиями:
а) Нагрев прутка на правом конце
 .
.
б) На левом конце подвод тепла отсутствует
 .
.
в) Показания на измерителе температур (x = 0) в момент времени t определяется следующим выражением
 .
.
Таким образом, для вычисления температуры на расстоянии L от измерителя по формуле для y(t) необходимо проинтегрировать дифференциальное уравнение с учетом начальных и граничных условий, т.е. получить функцию z(t,x). Затем следует проградуировать измеритель температуры, т.е. определить соответствие между x(t) и y(t), задавая различные значения x(t) и вычисляя  .
.
Контрольные вопросы к лекции 5
1. Где используются математические модели в виде обыкновенных дифференциальных уравнений?
2. Что должна включать в себя математическая модель в виде обыкновенных дифференциальных уравнений?
3. Какими методами осуществляется исследование моделей, заданных в виде обыкновенных дифференциальных уравнений?
4. Запишите математическую модель движения груза массой m, закрепленного на вертикальной стенке с помощью пружины жесткостью С и совершающего колебательное движение вдоль оси х в среде с вязкостью n.
5. Какой принцип используется при построении этой модели?
6. К какому типу относится эта модель?
7. Где используются математические модели в виде дифференциальных уравнений в частных производных?
8. Что является особенностью математических моделей в виде дифференциальных уравнений в частных производных?
9. Что должна включать в себя математическая модель в виде дифференциальных уравнений в частных производных?
10. Какого типа бывают граничные условия?
11. Приведите математическую модель распределения температурного поля в металлическом прутке, нагреваемом с одной стороны.
[spoiler title=”источники:”]
http://urok.1sept.ru/articles/679580
http://studizba.com/lectures/129-inzhenerija/1910-matematicheskoe-modelirovanie-processov/37307-9-matematicheskaja-model-v-vide-obyknovennyh-differencialnyh-uravnenij.html
[/spoiler]
СОДЕРЖАНИЕ
ВВЕДЕНИЕ
1.ДИФФЕРЕНЦИАЛЬНЫЕ
УРАВНЕНИЯ ПЕРВОГО И ВТОРОГО ПОРЯДКА
1.1.Дифференциальные
уравнения первого порядка
1.1.1.Общие
понятия и определения
1.1.2.Дифференциальные
уравнения с разделяющимися переменными
1.1.3.Линейные
уравнения первого порядка. Уравнение Бернулли
1.2.Линейные
дифференциальные уравнения второго порядка
1.2.1.Основные
понятия, структура общего решения
1.2.2.Линейные
однородные дифференциальные уравнения второго порядка с постоянными
коэффициентами
1.2.3.Системы
дифференциальных уравнений
2.ДИФФЕРЕНЦИАЛЬНЫЕ
УРАВНЕНИЯ ПЕРВОГО И ВТОРОГО ПОРЯДКА КАК МАТЕМАТИЧЕСКИЕ МОДЕЛИ.
2.1.Математическое
моделирование некоторых задач химии.
2.2.Математическое
моделирование некоторых задач сопротивления материалов
2.3.Математическое
моделирование некоторых задач динамики
2.4.Математическое
моделирование некоторых задач радиотехники
2.5.Математическое
моделирование некоторых задач биологии
ЗАКЛЮЧЕНИЕ
СПИСОК
ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
ВВЕДЕНИЕ
Исследование поведения различных
систем (сопротивления материалов, динамики,
биологии, химии и других отраслей научных знаний) часто
приводит к анализу и решению уравнений, включающих как параметры системы, так и
скорости их изменения, аналитическим выражением которых являются производные.
Такие уравнения, содержащие производные, называются дифференциальными.
Дифференциальные уравнения являются фундаментом для построения научных трудов и
функционально используется в производстве, что не маловажно для современной
экономики и других отраслей производства.
Теория дифференциальных уравнений (ДУ)
является одним из самых больших разделов современной математики. Чтобы
охарактеризовать ее место в современной математической науке, прежде всего необходимо
подчеркнуть основные особенности теории дифференциальных уравнений, состоящей
из двух обширных областей математики: теории обыкновенных дифференциальных
уравнений и теории уравнений с частными производными.
Первая особенность
–
это непосредственная связь теории дифференциальных уравнений с приложениями.
Характеризуя математику как метод проникновения в тайны природы, можно сказать,
что основным путем применения этого метода является формирование и изучение
математических моделей реального мира. Изучая какие –
либо
физические явления, исследователь прежде всего создает его математическую
идеализацию или, другими словами, математическую модель, то есть, пренебрегая
второстепенными характеристиками явления, он записывает основные законы,
управляющие этим явлением, в математической форме. Очень часто эти законы можно
выразить в виде дифференциальных уравнений. Такими оказываются модели различных
явлений механики сплошной среды, химических реакций, электрических и магнитных
явлений и др.
Второй особенностью
теории дифференциальных уравнений является ее связь с другими разделами
математики, такими, как функциональный анализ, алгебра и теория вероятностей.
Теория дифференциальных уравнений и особенно теория уравнений с частными
производными широко используют основные понятия, идеи и методы этих областей
математики и, более того, влияют на их проблематику и характер исследований.
Некоторые большие и важные разделы математики были вызваны к жизни задачами
теории дифференциальных уравнений.
Таким образом, теория
дифференциальных уравнений в настоящее время представляет собой исключительно
богатый содержанием, быстро развивающийся раздел математики, тесно связанный с
другими областями математики и с ее приложениями. Исходя из этого, цель курсовой
работы состоит в изучении практических приложений дифференциальных уравнений к
решению задач математической модели.
Поставленная цель достигается путем решения следующих задач:
1. Изучение ДУ
первого порядка, теоретические основы дифференциальных уравнений, ДУ с
разделяющимися переменными;
2. Изучение
линейных ДУ второго порядка с постоянными коэффициентами.
3. Решение задач
математического моделирования, химии, динамики, сопротивления материалов,
радиотехники и биологии.
Объект исследования – основные понятия теории дифференциального уравнения I и II
порядка.
Предмет исследования – способы реализации решения задач с
помощью математического моделирования на основе дифференциальных уравнений.
Методы
исследования:
1.Анализ
учебной и научной литературы; 2.Изучение способов и методов реализации
математических моделей; 3.Обобщение результатов.
В соответствии с целью, задачами и логикой исследования работа состоит
из введения, двух глав, заключения, списка использованной литературы.
1. ДИФФЕРЕНЦИАЛЬНЫЕ
УРАВНЕНИЯ ПЕРВОГО И ВТОРОГО ПОРЯДКА
1.1.Дифференциальные
уравнения первого порядка
1.1.1. Общие
понятия и определения
Обыкновенным дифференциальным
уравнением называется соотношение, связывающее независимую переменную,
неизвестную функцию этой переменной и её производные (или дифференциалы).
Порядком дифференциального уравнения
называется наивысший порядок входящей в него производной (или дифференциала).
Дифференциальным уравнением первого
порядка называется соотношение вида
F (x, y, y´)
= 0, (1.1)
где
x – независимая переменная; y = y(x) – искомая
функция; y´(x)
= ![]() –
–
её производная.
Если уравнение (1.1) можно записать в
виде
y´
= f (x, y) , (1.2)
то
говорят, что оно разрешимо относительно производной.
Часто встречается дифференциальная форма
записи уравнения первого порядка
P
(x,
y)dx + Q (x, y)dy = 0 ,
которая
удобна тем, что в качестве искомой функции может быть как x = x(y)
, так и y = y(x).
Решением (интегралом) дифференциального
уравнения первого порядка называется любая функция y = y(x),
превращающая это уравнение в тождество.
График функции y = y(x)
называется интегральной кривой.
Процесс решения дифференциального
уравнения называется его интегрированием.
На самом деле в процессе интегрирования
определится целый класс решений:
y = y (x, C), (1.3)
где
C – произвольная постоянная.
Класс (1.3) называется общим
решением дифференциального уравнения;
В некоторых случаях общее решение
дифференциального уравнения определяется в неявном виде: Ф (x, y, C)
= 0.
Геометрически общее решение представляет
собой семейство интегральных кривых на плоскости xOy .
При каждом конкретном значении С
= ![]() получают частное решение
получают частное решение
y = y (x,![]() ).
).
Задача о нахождении решения дифференциального
уравнения (1.2), удовлетворяющего начальному условию y (![]() ) =
) = ![]() , называется задачей Коши.
, называется задачей Коши.
Геометрически, такая задача предполагает
поиск интегральной кривой, которая проходит через заданную точку с координатами
(![]() ,
, ![]() ).
).
Решение дифференциального уравнения,
которое не может быть получено из общего решения ни при одном частном значении
произвольной постоянной (включая «предельные» случаи C = ±∞), называется его особым
решением.
При интегрировании дифференциального
уравнения надо стремиться к тому, чтобы наряду с общим решением были найдены
также и особые решения.
Среди всех дифференциальных уравнений
особый интерес представляют некоторые классы уравнений, для которых существуют
стандартные способы аналитического решения.
1.1.2. Дифференциальные уравнения с разделяющимися
переменными
Дифференциальное уравнение вида:
y´
= f (x) g(y) (1.4)
называется
уравнением с разделяющимися переменными.
Разделим переменные, учитывая, что y´(x)
= ![]() .
.
При этом уравнение (1.4)
преобразуется к виду ![]() = f
= f
(x)
dx.
Интегрируя, получим общее решение: ʃ
![]()
Замечания.
1. Характерный признак дифференциальных
уравнений с разделяющимися переменными – это наличие произведений (или частных)
«блоков», зависящих только от «х» или только от «у».
2. Если обе части уравнения делим на
переменную величину, то необходимо отдельно рассмотреть также случай, когда она
обращается в ноль. Так, постоянные у = ![]() , для которых g(
, для которых g(![]() ) = 0 , являются, очевидно,
) = 0 , являются, очевидно,
решениями уравнения (1.4).
3. Произвольная постоянная, возникающая
при интегрировании, может быть записана в виде kC или klnC, где k
– любой постоянный (ненулевой) множитель. В некоторых случаях такая запись
удобна для упрощения ответа.
1.1.3. Линейные уравнения первого порядка. Уравнение Бернулли
Линейным дифференциальным уравнением
первого порядка называется уравнение вида
![]() + p(x)
+ p(x)
y
= q(x),
(1.5)
где
p(x), q(x) – непрерывные (на данном интервале)
функции.
Характерный признак таких уравнений –
функция y и её производная ![]() содержатся в уравнении в
содержатся в уравнении в
первой степени.
Уравнение Бернулли имеет
вид
![]() + p(x) y = q(x)
+ p(x) y = q(x)
![]() , n ≠ 0, n ≠
, n ≠ 0, n ≠
1. (1.6)
Существует несколько методов решения
уравнений данных видов: метод вариации произвольных постоянных, метод
интегрирующего множителя, метод Бернулли.
Рассмотрим метод Бернулли. При
этом решение каждого из уравнений (1.5), (1.6) будем искать в виде
y
= uv ,
где
u = u(x), v = v(x) – неизвестные
функции.
По правилу дифференцирования
произведения получим ![]() =
= ![]() v + u
v + u![]()
(аргумент
«x» в дальнейшем опускаем).
В этом случае линейное уравнение
(1.6), например, записывается следующим образом
![]() v
v
+ u(![]() + pv)
+ pv)
= q
.
Множитель v =
v(x)
можно выбрать как некоторое решение уравнения ![]() + pv
+ pv
= 0 .
Тогда исходное уравнение оказывается эквивалентным
уравнению с разделяющимися переменными ![]() v
v
= q,
общее решение которого есть некоторая u
= u(x,
C).
Окончательно общий интеграл линейного
дифференциального уравнения примет вид
y
= v(x)
u (x,
C).
Таким образом, в процессе решения приходится
дважды решать уравнения с разделяющимися переменными.
По той же схеме решается и уравнение
Бернулли.
1.2. Линейные дифференциальные уравнения второго порядка
1.2.1. Основные понятия, структура общего решения
Линейным дифференциальным уравнением
(ЛДУ) второго порядка называется уравнение вида
y´´
+ p(x)y´ + q(x)y = f (x),
(2.1)
где
функции p(x), q(x), f (x) непрерывны
на некотором интервале (a; b).
Если f (x) ≡ 0, то
уравнение (2.1) называется линейным однородным дифференциальным
уравнением (ЛОДУ):
y´´
+ p(x)y´ + q(x)y = 0 , (2.2)
а
в противном случае – линейным неоднородным (ЛНДУ).
Общее решение
![]() линейного однородного
линейного однородного
дифференциального уравнения имеет вид
![]() =
= ![]()
![]() (x)
(x)
+
![]()
![]() (x),
(x),
(2.3)
где
![]() (x),
(x), ![]() (x) – линейно
(x) – линейно
независимые решения этого уравнения (фундаментальная система решений), ![]() ,
, ![]() – произвольные
– произвольные
постоянные.
При этом функции ![]() (x) и
(x) и ![]() (x) называются линейно
(x) называются линейно
независимыми в промежутке (a; b), если их отношение ![]() (в этом промежутке) не является
(в этом промежутке) не является
постоянной величиной. В противном случае функции называются линейно зависимыми.
Для того, чтобы частные решения
уравнения (2.2) ![]() (x) и
(x) и ![]() (x) были линейно
(x) были линейно
независимы в промежутке (a; b), необходимо и достаточно, чтобы их
определитель Вронского

был
отличен от нуля хотя бы в одной точке ![]()
![]() (a;
(a;
b).
Общее решение н y линейного
неоднородного дифференциального уравнения представляет собой сумму
![]() =
= ![]() +
+ ![]() ,
,
(2.4)
где
![]() – общее решение
– общее решение
соответствующего однородного уравнения (2.2);
![]() – некоторое частное
– некоторое частное
решение неоднородного уравнения (2.1).
Остановимся подробнее на линейных
уравнениях с постоянными коэффициентами, для которых существуют стандартные
алгоритмы решения.
1.2.2. Линейные однородные дифференциальные уравнения второго
порядка с постоянными коэффициентами
Если в уравнении (2.2) все коэффициенты
постоянны, то оно называется линейным однородным уравнением с постоянными
коэффициентами
y´´
+ py´ + qy = 0 , (2.5)
где
p, q – действительные числа.
Решение этого уравнения будем искать
в виде y = ![]() . Значения параметра λ
. Значения параметра λ
определяются как решения квадратного уравнения
![]() + pλ +
+ pλ +
q=
0 , (2.6)
которое
называется характеристическим уравнением.
Чтобы получить общее решение уравнения
(2.5), следует воспользоваться следующим алгоритмом:
– найти корни соответствующего
характеристического уравнения
![]() =
= ![]() ,
,
где
D
= ![]() – 4q;
– 4q;
– записать фундаментальную систему
решений (ФСР);
– использовать формулу (2.3) для записи
![]() .
.
При нахождении корней характеристического
уравнения (2.6) и построении ФСР возникают следующие случаи, приведённые в табл.1.
Таким образом, решение линейного
однородного дифференциального уравнения с постоянными коэффициентами сводится к
вышеуказанной простой последовательности действий.
Таблица.
1. – нахождении корней характеристического уравнения

1.2.3. Системы дифференциальных уравнений
В нашей курсовой работе ограничимся
рассмотрением систем двух дифференциальных уравнений. С подобными системами
приходится встречаться часто в теоретической механике, сопротивлении материалов
и в других приложениях математики.
Система дифференциальных уравнений первого
порядка вида

(2.7)
где
t – независимая переменная; x(t), y(t) –
неизвестные функции, называется нормальной.
Пара функций x = x(t),
y = y(t) является решением системы (2.7), если
каждое из уравнений системы они обращают в тождество.
Класс функций вида

называется
общим решением системы (2.7), если при всех значениях произвольных
постоянных ![]() ,
, ![]() , соответствующая пара
, соответствующая пара
функций {x, y} является решением системы.
Для системы дифференциальных уравнений
(2.7) можно сформулировать задачу Коши: найти решение

удовлетворяющее
начальным условиям

С точки зрения механики, решить систему
– значит восстановить закон движения точки по известному вектору скорости

Иногда нормальную систему дифференциальных
уравнений удаётся свести к одному уравнению второго порядка, содержащему одну
неизвестную функцию. Это может быть достигнуто дифференцированием одного из
уравнений системы и исключением всех неизвестных, кроме одной (метод
исключения).
Если правые части уравнений системы
(2.7) являются линейными функциями, то система называется линейной.
Ограничимся рассмотрением линейной
однородной системы с постоянными коэффициентами

(2.8)
где
a, b, p, q – некоторые числа.
Переобозначим производные: ![]() =
=
![]()
Тогда система (2.13) примет вид
 (2.9)
(2.9)
Пусть для определённости p ≠ 0
.
Выразим х из второго уравнения
системы (2.14):
![]() (2.10)
(2.10)
Дифференцируем второе уравнение
системы (2.14) по переменной t:
![]()
Затем подставляем в него
![]() из
из
первого уравнения системы:
![]()
В полученное равенство вместо x
подставим выражение (2.10):
![]()
или
![]() (2.11)
(2.11)
Соотношение (2.16) – это линейное
однородное дифференциальное уравнение второго порядка с постоянными
коэффициентами, его характеристическое уравнение можно записать с помощью
определителя
![]() = 0
= 0
В соответствии с корнями ![]() ,
, ![]() найдём фундаментальную
найдём фундаментальную
систему решений ![]() и
и ![]() , а затем и общее
, а затем и общее
решение уравнения (2.11):
![]()
Затем из равенства (2.15) находим
функцию x (t,
![]() ,
, ![]() ). В результате будет
). В результате будет
получено общее решение системы (2.14).
2. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПЕРВОГО И ВТОРОГО ПОРЯДКА КАК
МАТЕМАТИЧЕСКИЕ МОДЕЛИ.
В различных областях человеческой
деятельности возникает большое число задач, которые сводятся к решению
дифференциальных уравнений. Характер этих задач и методику их решения можно
схематически описать примерно так. Происходит некоторый процесс, например
физический, химический, биологический. Нас интересует определенная функциональная
характеристика этого процесса, например закон изменения со временем температуры
или давления, массы, положения в пространстве.
Если имеется достаточно полная информация
о течении этого процесса, то можно попытаться построить его математическую
модель. Во многих случаях такой моделью служит дифференциальное уравнение,
одним из решений которого является искомая функциональная характеристика процесса.
Дифференциальное уравнение моделирует
процесс в том смысле, что оно описывает эволюцию процесса, характер
происходящих с материальной системой изменений, возможные варианты этих
изменений в зависимости от первоначального состояния системы.
2.1. Математическое моделирование некоторых задач химии.
Задача 1.
В результате химической реакции между веществами А и B образуется
вещество C. Установить зависимость количества вещества C от времени,
если в момент вступления в реакцию количества веществ A и B были
равны соответственно a и b. Скорость реакции пропорциональна
произведению реагирующих масс.
Решение.
Пусть x = x (t) – количество вещества C через время
t после начала реакции;
![]() – скорость образования
– скорость образования
вещества (скорость реакции). По условию
![]() = k (a
= k (a
– x)
(b
– x),
где k > 0 – коэффициент пропорциональности. Разделяем переменные и
решаем уравнение:
![]() .
.
Из
начального условия x(0) = 0 находим ![]() , тогда
, тогда
![]()
Выразим из этого равенства x,
получим:
![]()
Если b
> a , то x(t)
→ a при t
→ ∞; если b
< a , то x(t)
→ b при t
→ ∞.
Если количества веществ A и B
равны, т.е. a = b, то уравнение реакции примет вид:
![]() .
.
С учётом начального условия процесс
реакции описывается зависимостью x(t)
= ![]()
Таким образом, x(t) → a
при t → ∞.
2.2. Математическое моделирование некоторых задач
сопротивления материалов
Задача 2.
В сопротивлении материалов доказывается, что дифференциальное уравнение
изогнутой оси простой балки постоянного сечения, несущей сплошную равномерно
распределённую нагрузку интенсивностью q, имеет вид
![]()
(3.1)
где
ω – прогиб балки в сечении с абсциссой x; EI – постоянная
величина, так называемая «жёсткость на изгиб сечения балки»; l – длина
балки.
Найти решение этого уравнения,
удовлетворяющее краевым (граничным) условиям ω(0) = 0, ω(l) = 0, т.е. в
том случае, когда на концах балки прогиб равен нулю.
Решение.
Уравнение (3.7) – это уравнение второго порядка, которое допускает понижение
порядка. Решим его, последовательно (дважды) интегрируя:
![]()
Первое краевое условие даёт значение ![]() = 0 , второе – значение
= 0 , второе – значение
![]() Искомое
Искомое
решение краевой задачи есть

2.3.
Математическое моделирование некоторых задач динамики

Задача 3.
В последовательном контуре наблюдаются свободные колебания, если отсутствует внешний
источник, и конденсатор был заряжен к моменту замыкания ключа S.
После замыкания ключа S
в момент времени t
= 0 конденсатор разряжается через цепь с коэффициентом самоиндукции L
и сопротивлением R
(рис. 1). Определить напряжение ![]() на обкладках
на обкладках
конденсатора, если в начальный момент времени
![]()
Решение.
На основании законов Кирхгофа имеем:
![]() .
.
Таким образом, получаем дифференциальное
уравнение, описывающее процессы в цепи:
![]() (3.2)
(3.2)
где
α
= ![]() –
–
коэффициент затухания; ![]() –
–
частота собственных колебаний.
Уравнение (3.2)
– это линейное однородное дифференциальное уравнение с постоянными
коэффициентами. Поскольку в задании даны ещё начальные условия, то мы имеем
задачу Коши.
Характеристическое уравнение,
соответствующее (3.2):
![]()
Рассмотрим три случая для корней
характеристического уравнения:
а) D
= 4![]() < 0. Тогда уравнение
< 0. Тогда уравнение
(3.2) имеет комплексные корни: ![]() ,
, ![]() =
= ![]() 1 (часто в инженерных
1 (часто в инженерных
приложениях и физике мнимая единица обозначается через j).
С учётом начальных условий ![]() решение задачи
решение задачи
Коши
в этом случае будет иметь вид:

Если ![]() > 0 , то напряжение
> 0 , то напряжение ![]() стремится к нулю. В
стремится к нулю. В
контуре наблюдаются периодические, с периодом  ,
,
затухающие по экспоненциальному закону колебания. Если R = 0 (т.е.
отсутствует активная составляющая цепи), то напряжение на обкладках
конденсатора изменяется периодически по гармоническому закону с периодом ![]() :
:
![]() (гармонический
(гармонический
колебательный процесс).
б) D
= 4![]() Решение задачи Коши в
Решение задачи Коши в
данном случае имеет
вид:
![]()
Напряжение ![]() (t) стремится к
(t) стремится к
нулю при t → +∞ и изменяется без колебаний (затухающий апериодический процесс).
в) D = 4![]() Тогда
Тогда

Напряжение ![]() (t) стремится к
(t) стремится к
нулю при t → +∞ , колебаний нет, и конденсатор апериодически
разряжается.
2.4. Математическое
моделирование некоторых задач радиотехники
Задача 4.
Найти решение системы дифференциальных уравнений

удовлетворяющее
начальным условиям x(0) = y(0) = 0 , x´(0) = μ , y´(0)
= ƞ (здесь k и g – постоянные величины).
Решение.
Предложенная система описывает движение снаряда с учётом сопротивления среды. Каждое
уравнение системы содержит только одну неизвестную функцию. Из первого
уравнения системы имеем

Это линейное однородное уравнение
второго порядка с постоянными коэффициентами. Его общее решение есть x(t)
= ![]() +
+ ![]()
![]() .
.
Для вычисления констант ![]() ,
, ![]() используем начальные
используем начальные
условия, в результате чего получим:
![]()
Итак, частное решение первого
уравнения системы принимает вид:

Второе уравнение системы – это линейное
неоднородное уравнение второго порядка с правой частью специального вида:
![]()
Общее решение второго уравнения
системы:
![]()
Используя начальные условия, найдём
значения ![]() ,
, ![]() :
:

Тогда решение второго уравнения
системы:

Окончательно получим параметрические
уравнения траектории снаряда:

Если исключить параметр t из
этих уравнений, то окажется, что:

Отсюда при y = 0 можно найти
горизонтальную дальность стрельбы:

2.5. Математическое моделирование некоторых задач биологии
Живой
организм представляет собой слишком сложную систему, чтобы его можно было
рассматривать сразу во всех подробностях; поэтому исследователь всегда выбирает
упрощённую точку зрения, подходящую для решения конкретно поставленной задачи.
Это сознательное упрощение реальных биосистем и лежит в основе метода
моделирования.
Обычно, модели, используемые в
биологии, делят на три категории:
1.Биологические предметные модели, на
которых изучаются общие закономерности, патологические процессы, действие
различных препаратов и т. д. К этому классу моделей относят, например,
лабораторных животных, изолированные органы. Культуры клеток, суспензии
органелл и пр.
2.Физические (аналоговые)
модели, т. е. физические модели, обладающие аналогичным с моделируемым объектом
поведением. Например, деформации, возникающие в кости при различных нагрузках,
могут быть изучены на специально подготовленном макете кости. Движение крови по
крупным сосудам моделируется цепочкой резисторов, конденсаторов и индуктивных катушек.
3.Математические модели представляют
собой системы математических выражений – формул, функций, уравнений и т. д.,
описывающих те или иные свойства изучаемого объекта, явления, процесса. При
создании математической модели используют физические закономерности, выявленные
при экспериментальном изучении объекта моделирования. Так, например,
математическая модель кровообращения основано на законах гидродинамики.
Математическое моделирование, как
метод исследования обладает рядом несомненных достоинств.
Во–первых,
сам метод изложения количественных закономерностей математическим языком точен
и экономичен.
Во–вторых, проверка гипотез,
сформулированных на основе опытных данных, может быть осуществлена путём испытания
математической модели, созданной на основе этой гипотезы. Наконец,
математическая модель позволяет судить о поведении таких систем и в таких
условиях, которые трудно создать в эксперименте или в клинике, изучать работу
исследуемой системы целиком или работу её любой отдельной части.
Задача 5. Определить
во сколько раз увеличится количество бактерий за 9 часов, если в течение 3
часов их количество изменилось от 100 да 200.
Решение. Опытным
путём установлено, что скорость размножения бактерий, если для них имеется
достаточный запас пищи и созданы другие необходимые внешние условия (например,
отсутствие подавления бактерий другими видами), пропорциональна их количеству.
![]() Пусть х –
Пусть х –
количество бактерий, имеющееся в данный момент, тогда скорость изменения их
количества:
 Так как скорость размножения бактерий
Так как скорость размножения бактерий
пропорциональна их количеству, то существует такая k, что:
 Разделяем в дифференциальном уравнении
Разделяем в дифференциальном уравнении
переменные:
 Интегрируя,
Интегрируя,
получаем:
что
после потенцирования даёт:
Для нахождения С используем
начальное условие: при t
= 0 х = 100. Имеем: Се˚ = 100, С = 100, и,
значит, х = 100 еkt.
Коэффициент е k находим
из условия: при t
= 3 х = 200. Имеем:
Искомая
функция:
При t
= 9 х = 800.
Ответ: Количество
бактерий за 9 часов увеличится в 8 раз.
Заметим, что закон, при котором
скорость увеличения вещества пропорциональна наличному количеству вещества это,
так называемый, закон «естественного роста».
Эта математическая модель процесса
изменения количества микроорганизмов в колонии в зависимости от времени
получена при очень больших предположениях (при неограниченных ресурсах питания
и пространства для обитания и отсутствии межвидовой борьбы). В природе же, ни в
одной из реально существующих колоний такой рост наблюдаться не может.
Ответ на вопрос, насколько закон
«естественного роста» отвечает реальному процессу, даёт опытная проверка.
Очевидно, что на каком-то подмножестве данные будут хорошо согласованы с
моделью, а саму модель можно использовать для прогноза.
В 1845 году Ферхюлст –
Перл получил уравнение, учитывающее внутривидовую борьбу микроорганизмов. В
результате конкурентной борьбы внутри вида за пищу и место распространения, а
так же за счёт болезней скорость роста снижается. В общем виде уменьшение
прироста является некоторой новой функцией от х и Δх, которую
обозначим через b(х,
Δх). Уменьшение количества особей в результате конкуренции тем
больше, чем больше число встреч между особями, т. е. пропорционально
произведению х-х т. е. х2. Таким образом,
b(х,
Δх) = δ х2 Δt.
Тогда
Δх = ε х
Δt –
δ
х2Δt.
 |
Здесь
ε – специфическая (врождённая) скорость размножения популяции, δ –
коэффициент внутривидовой конкуренции. Разделим обе
части последнего уравнения на Δt и переходя к пределу, получим
 |
Это
и есть уравнение Ферхюлста –
Перла. Решением этого уравнения после математических преобразований и
обозначения ε/δ
= h при
t0
= 0 и х(0) = х0 является:
ЗАКЛЮЧЕНИЕ
Изучение большого круга задач
сопротивления материалов, динамики, биологии и других отраслей научных знаний
показывает, что решение многих из них сводится к математическому моделированию
процессов в виде формулы, т.е. в виде функциональной зависимости.
Так, например, некоторые процессы в
радиотехнике, кинетика химических реакций, динамика биологических популяций,
движение космических объектов, модели экономического развития исследуются с
помощью уравнений, в которых кроме независимых переменных и неизвестных функций
этих переменных, содержатся производные неизвестных функций (или их
дифференциалы).
Такие уравнения называются дифференциальными.
Вот почему возможности применения
дифференциальных уравнений для решения задач по дисциплинам естественно –
научного цикла довольно широки.
В представленной работе:
– описаны
теоретические основы дифференциальных уравнений;
–
рассмотрены некоторые приёмы решения задач с помощью дифференциальных уравнений
по химии, радиотехники, биологии, сопротивления материалов и динамики.
В ходе работы, возникла необходимость
более полного, чем предполагалось, изучения основ моделирования реальных
объектов.
Практическая ценность метода
математического моделирования заключается в следующем:
– правильно
составленная и всесторонне использованная математическая модель позволяет
оптимизировать изучение реальной системы по времени;
– математическая
модель позволяет облегчить прогнозирование хода и результатов экспериментов,
проводимых в реальных системах.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Агафонов, С.А. Дифференциальные
уравнения / С.А. Агафонов, А.Д. Герман, Т.В. Муратова. – МГТУ им. Н.Э. Баумана,
2004. (Сер. Математика в техническом университете; Вып. VII).
2. Берман, Г.Н. Сборник задач по курсу
математического анализа: учебное пособие / Г.Н. Берман. – 22-е изд., перераб. –
Спб. : Профессия, 2005.
3. Данко, П.Е. Высшая математика в
упражнениях и задачах : учебное пособие для вузов. В 2 ч. Ч. 2 / П. Е. Данко,
А.Г. Попов, Т.Я. Кожевникова. – 6-е изд. – М.: ООО «Издательство Оникс»; ООО
Издательство «Мир и образование», 2006.
4. Каплан, И.А. Практикум по высшей
математике : учебное пособие. В 2 т. Т. 2 / И.А. Каплан, В.И. Пустынников ; под
общей ред. проф. В.И. Пустынникова. – 6-е изд., испр. и доп. – М. : Эксмо,
2008. (Образовательный стандарт XXI).
5. Мышкис, А.Д. Прикладная математика
для инженеров. Специальные курсы / А.Д. Мышкис. – 3-е изд., доп. – М. :
ФИЗМАТЛИТ, 2007.
6. Нахман, А.Д. Сборник задач по
дифференциальным уравнениям и их приложениям : учебное пособие / А.Д. Нахман,
С.В. Плотникова. – Тамбов : Издательство Тамб. гос. техн. ун-та, 2005.
7. Нахман, А.Д. Дифференциальные
уравнения : методическое пособие / А.Д. Нахман. – Тамбов : ТОИПКРО, 2007.
8. Сборник задач по высшей математике.
2 курс / К.Н. Лунгу и др.; под ред. С.Н. Федина. – 5-е изд. – М. : Айрис-пресс,
2007.
9. Самойленко, А.М. Дифференциальные
уравнения: примеры и задачи : учебное пособие / А.М. Самойленко, С.А. Кривошея,
Н.А. Перестюк. – 2-е изд., перераб. – М. : Высшая школа, 1989.
Численное решение математических моделей объектов заданных системами дифференциальных уравнений
Время на прочтение
13 мин
Количество просмотров 65K
Введение:
При математическом моделировании ряда технических устройств используются системы дифференциальных нелинейных уравнений. Такие модели используются не только в технике, они находят применение в экономике, химии, биологии, медицине, управлении.
Исследование функционирования таких устройств требуют решения указанных систем уравнений. Поскольку основная часть таких уравнений являются нелинейными и нестационарными, часто невозможно получить их аналитическое решение.
Возникает необходимость использовать численные методы, наиболее известным из которых является метод Рунге — Кутты [1]. Что касается Python, то в публикациях по численным методам, например [2,3], данных по применение Рунге — Кутты крайне мало, а по его модификации — методу Рунге-Кутта-Фельберга вообще нет.
В настоящее время, благодаря простому интерфейсу, наибольшее распространение в Python имеет функцию odeint из модуля scipy.integrate. Вторая функция ode из этого модуля реализует несколько методов, в том числе и упомянутый пятиранговый метод Рунге-Кутта-Фельберга, но, вследствие универсальности, имеет ограниченное быстродействие.
Целью настоящей публикации является сравнительный анализ перечисленных средств численного решения систем дифференциальных уравнений с модифицированным автором под Python методом Рунге-Кутта-Фельберга. В публикации так же приведены решения по краевым задачам для систем дифференциальных уравнений (СДУ).
Краткие теоретические и фактические данные по рассматриваемым методам и программным средствам для численного решения СДУ
Задача Коши
Для одного дифференциального уравнения n – го порядка, задача Коши состоит в нахождении функции, удовлетворяющей равенству:

и начальным условиям

Перед решением эта задача должна быть переписана в виде следующей СДУ
 (1)
(1)
с начальными условиями

Модуль scipy.integrate
Модуль имеет две функции ode() и odeint(), предназначенные для решения систем обыкновенных дифференциальных уравнений (ОДУ) первого порядка с начальными условиями в одной точке (задача Коши). Функция ode() более универсальная, а функция odeint() (ODE integrator) имеет более простой интерфейс и хорошо решает большинство задач.
Функция odeint()
Функция odeint() имеет три обязательных аргумента и много опций. Она имеет следующий формат odeint(func, y0, t[,args=(), …]) Аргумент func – это имя Python функции двух переменных, первой из которых является список y=[y1,y2,…,yn], а второй – имя независимой переменной.
Функция func должна возвращать список из n значений функций  при заданном значении независимого аргумента t. Фактически функция func(y,t) реализует вычисление правых частей системы (1).
при заданном значении независимого аргумента t. Фактически функция func(y,t) реализует вычисление правых частей системы (1).
Второй аргумент y0 функции odeint() является массивом (или списком) начальных значений  при t=t0.
при t=t0.
Третий аргумент является массивом моментов времени, в которые вы хотите получить решение задачи. При этом первый элемент этого массива рассматривается как t0.
Функция odeint() возвращает массив размера len(t) x len(y0). Функция odeint() имеет много опций, управляющих ее работой. Опции rtol (относительная погрешность) и atol (абсолютная погрешность) определяют погрешность вычислений ei для каждого значения yi по формуле

Они могут быть векторами или скалярами. По умолчанию

Функция ode()
Вторая функция модуля scipy.integrate, которая предназначена для решения дифференциальных уравнений и систем, называется ode(). Она создает объект ОДУ (тип scipy.integrate._ode.ode). Имея ссылку на такой объект, для решения дифференциальных уравнений следует использовать его методы. Аналогично функции odeint(), функция ode(func) предполагает приведение задачи к системе дифференциальных уравнений вида (1) и использовании ее функции правых частей.
Отличие только в том, что функция правых частей func(t,y) первым аргументом принимает независимую переменную, а вторым – список значений искомых функций. Например, следующая последовательность инструкций создает объект ODE, представляющий задачу Коши.
Метод Рунге—Кутта
При построении численных алгоритмов будем считать, что решение этой дифференциальной задачи существует, оно единственно и обладает необходимыми свойствами гладкости.
При численном решении задачи Коши
 (2)
(2)
 (3)
(3)
по известному решению в точке t =0 необходимо найти из уравнения (3) решение при других t. При численном решении задачи (2),(3) будем использовать равномерную, для простоты, сетку по переменной t с шагом т > 0.
Приближенное решение задачи (2), (3) в точке  обозначим
обозначим  . Метод сходится в точке
. Метод сходится в точке  если
если  при
при  . Метод имеет р-й порядок точности, если
. Метод имеет р-й порядок точности, если  , р > 0 при . Простейшая разностная схема для приближенного решения задачи (2),(3) есть
, р > 0 при . Простейшая разностная схема для приближенного решения задачи (2),(3) есть
 (4)
(4)
При  имеем явный метод и в этом случае разностная схема аппроксимирует уравнение (2) с первым порядком. Симметричная схема
имеем явный метод и в этом случае разностная схема аппроксимирует уравнение (2) с первым порядком. Симметричная схема  в (4) имеет второй порядок аппроксимации. Эта схема относится к классу неявных — для определения приближенного решения на новом слое необходимо решать нелинейную задачу.
в (4) имеет второй порядок аппроксимации. Эта схема относится к классу неявных — для определения приближенного решения на новом слое необходимо решать нелинейную задачу.
Явные схемы второго и более высокого порядка аппроксимации удобно строить, ориентируясь на метод предиктор-корректор. На этапе предиктора (предсказания) используется явная схема
 (5)
(5)
а на этапе корректора (уточнения) — схема

В одношаговых методах Рунге—Кутта идеи предиктора-корректора реализуются наиболее полно. Этот метод записывается в общем виде:
 (6),
(6),
где

Формула (6) основана на s вычислениях функции f и называется s-стадийной. Если  при
при  имеем явный метод Рунге—Кутта. Если при j>1 и
имеем явный метод Рунге—Кутта. Если при j>1 и  то
то  определяется неявно из уравнения:
определяется неявно из уравнения:
 (7)
(7)
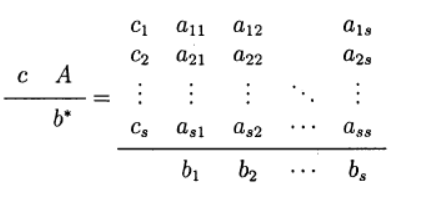
О таком методе Рунге—Кутта говорят как о диагонально-неявном. Параметры  определяют вариант метода Рунге—Кутта. Используется следующее представление метода (таблица Бутчера)
определяют вариант метода Рунге—Кутта. Используется следующее представление метода (таблица Бутчера)
Одним из наиболее распространенных является явный метод Рунге—Кутта четвертого порядка
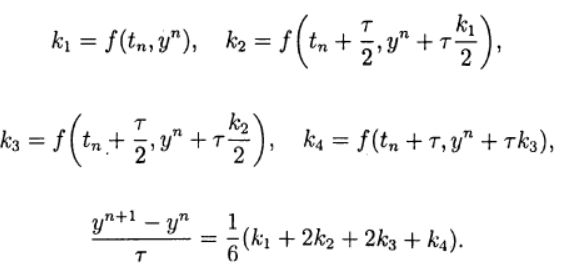 (8)
(8)
Метод Рунге—Кутта— Фельберга
Привожу значение расчётных коэффициентов метода
 (9)
(9)
С учётом(9) общее решение имеет вид:
 (10)
(10)
Это решение обеспечивает пятый порядок точности, остаётся его адаптировать к Python.
Вычислительный эксперимент по определению абсолютной погрешности численного решения нелинейного дифференциального уравнения 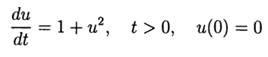 с использованием обеих функций def odein(),def oden() модуля scipy.integrate и адаптированного к Python методов Рунге—Кутта и Рунге—Кутта— Фельберга
с использованием обеих функций def odein(),def oden() модуля scipy.integrate и адаптированного к Python методов Рунге—Кутта и Рунге—Кутта— Фельберга
Листинг программы
from numpy import*
import matplotlib.pyplot as plt
from scipy.integrate import *
def odein():
#dy1/dt=y2
#dy2/dt=y1**2+1:
def f(y,t):
return y**2+1
t =arange(0,1,0.01)
y0 =0.0
y=odeint(f, y0,t)
y = array(y).flatten()
return y,t
def oden():
f = lambda t, y: y**2+1
ODE=ode(f)
ODE.set_integrator('dopri5')
ODE.set_initial_value(0, 0)
t=arange(0,1,0.01)
z=[]
t=arange(0,1,0.01)
for i in arange(0,1,0.01):
ODE.integrate(i)
q=ODE.y
z.append(q[0])
return z,t
def rungeKutta(f, to, yo, tEnd, tau):
def increment(f, t, y, tau):
if z==1:
k0 =tau* f(t,y)
k1 =tau* f(t+tau/2.,y+k0/2.)
k2 =tau* f(t+tau/2.,y+k1/2.)
k3 =tau* f(t+tau, y + k2)
return (k0 + 2.*k1 + 2.*k2 + k3) / 6.
elif z==0:
k1=tau*f(t,y)
k2=tau*f(t+(1/4)*tau,y+(1/4)*k1)
k3 =tau *f(t+(3/8)*tau,y+(3/32)*k1+(9/32)*k2)
k4=tau*f(t+(12/13)*tau,y+(1932/2197)*k1-(7200/2197)*k2+(7296/2197)*k3)
k5=tau*f(t+tau,y+(439/216)*k1-8*k2+(3680/513)*k3 -(845/4104)*k4)
k6=tau*f(t+(1/2)*tau,y-(8/27)*k1+2*k2-(3544/2565)*k3 +(1859/4104)*k4-(11/40)*k5)
return (16/135)*k1+(6656/12825)*k3+(28561/56430)*k4-(9/50)*k5+(2/55)*k6
t = []
y= []
t.append(to)
y.append(yo)
while to < tEnd:
tau = min(tau, tEnd - to)
yo = yo + increment(f, to, yo, tau)
to = to + tau
t.append(to)
y.append(yo)
return array(t), array(y)
def f(t, y):
f = zeros([1])
f[0] = y[0]**2+1
return f
to = 0.
tEnd = 1
yo = array([0.])
tau = 0.01
z=1
t, yn = rungeKutta(f, to, yo, tEnd, tau)
y1n=[i[0] for i in yn]
plt.figure()
plt.title("Абсолютная погрешность численного решения(т.р.- u(t)=tan(t)) ДУn
du/dt=u**2+1 c u(0)=0 при t>0")
plt.plot(t,abs(array(y1n)-array(tan(t))),label='Метод Рунге—Кутта n
четвертого порядка - расчёт по алгоритму')
plt.xlabel('Время')
plt.ylabel('Абсолютная погрешность.')
plt.legend(loc='best')
plt.grid(True)
z=0
t, ym = rungeKutta(f, to, yo, tEnd, tau)
y1m=[i[0] for i in ym]
plt.figure()
plt.title("Абсолютная погрешность численного решения(т.р.- u(t)=tan(t)) ДУn
du/dt=u**2+1 c u(0)=0 при t>0")
plt.plot(t,abs(array(y1m)-array(tan(t))),label='Метод Рунге—Кутта— Фельберга n
пятого порядка - расчёт по алгоритму')
plt.xlabel('Время')
plt.ylabel('Абсолютная погрешность.')
plt.legend(loc='best')
plt.grid(True)
plt.figure()
plt.title("Абсолютная погрешность численного решения (т.р.- u(t)=tan(t)) ДУn
du/dt=u**2+1 c u(0)=0 при t>0")
y,t=odein()
plt.plot(t,abs(array(tan(t))-array(y)),label='Функция odein')
plt.xlabel('Время')
plt.ylabel('Абсолютная погрешность.')
plt.legend(loc='best')
plt.grid(True)
plt.figure()
plt.title("Абсолютная погрешность численного решения (т.р.- u(t)=tan(t)) ДУn
du/dt=u**2+1 c u(0)=0 при t>0")
z,t=oden()
plt.plot(t,abs(tan(t)-z),label='Функция ode метод Рунге—Кутта— Фельберга n
пятого порядка')
plt.xlabel('Время')
plt.ylabel('Абсолютная погрешность.')
plt.legend(loc='best')
plt.grid(True)
plt.show()
Получим:
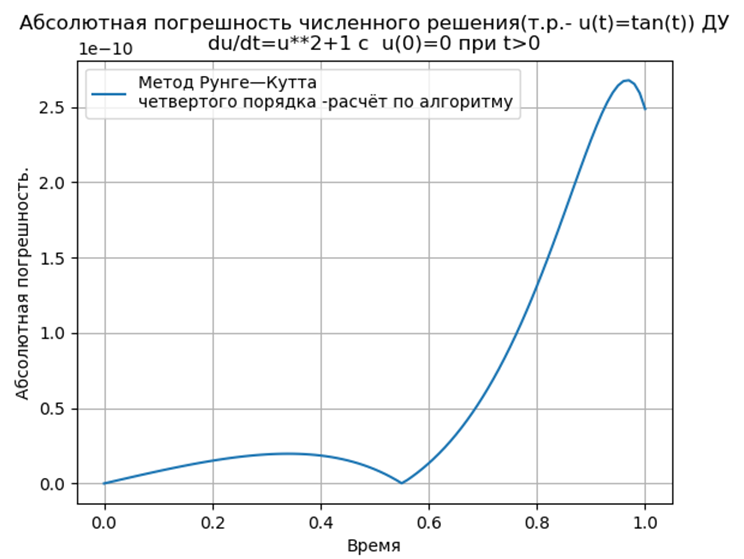
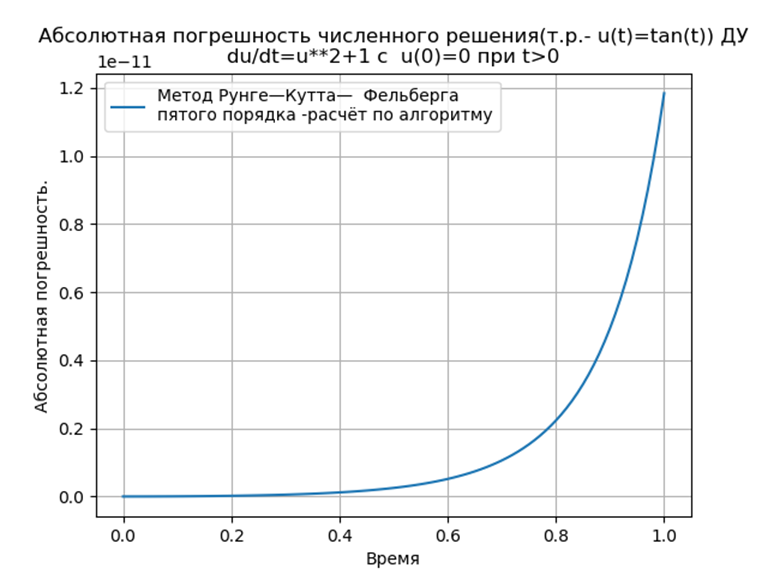
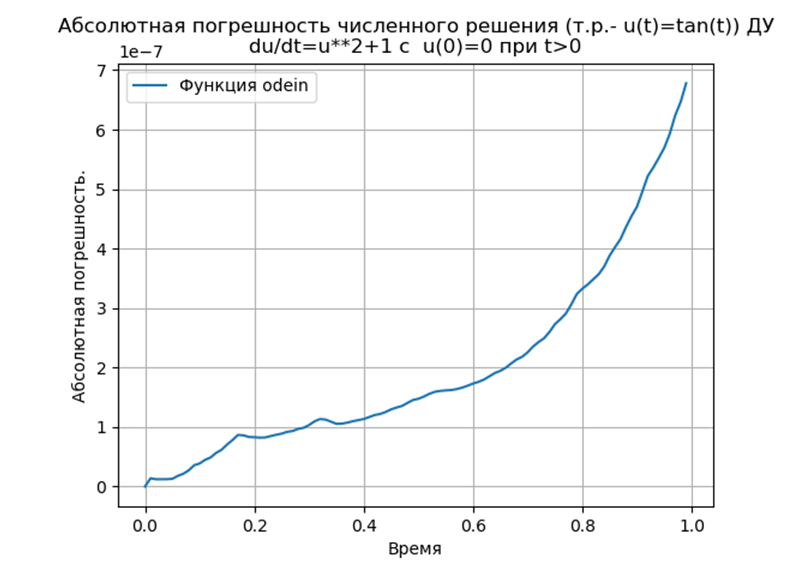
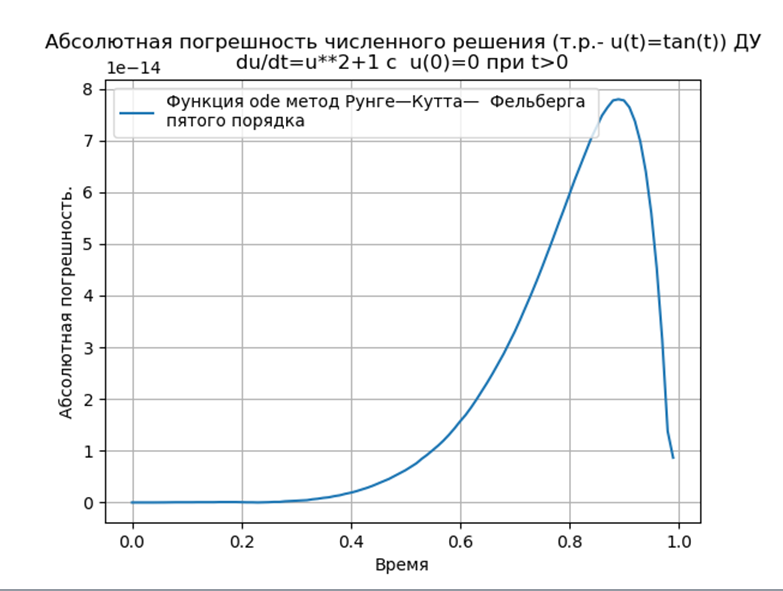
Вывод:
Адаптированные к Python методы Рунге—Кутта и Рунге—Кутта— Фельберга имеют меньшую абсолютную, чем решение с применением функции odeint, но большую, чем с использованием функции edu. Необходимо провести исследование быстродействия.
Численный эксперимент по сравнению быстродействия численного решения СДУ при использовании функции ode с атрибутом dopri5 (метод Рунге – Кутты 5 порядка) и с использованием адаптированного к Python метода Рунге—Кутта— Фельберга
Сравнительный анализ проведём на примере модельной задачи, приведенной в [2]. Чтобы не повторять источник, приведу постановку и решение модельной задачи из [2].
Решим задачу Коши, описывающую движение тела, брошенного с начальной скоростью v0 под углом α к горизонту в предположении, что сопротивление воздуха пропорционально квадрату скорости. В векторной форме уравнение движения имеет вид

где  – радиус вектор движущегося тела,
– радиус вектор движущегося тела,  – вектор скорости тела,
– вектор скорости тела,  – коэффициент сопротивления, вектор
– коэффициент сопротивления, вектор  силы веса тела массы m, g – ускорение свободного падения.
силы веса тела массы m, g – ускорение свободного падения.
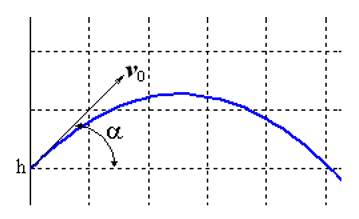
Особенность этой задачи состоит в том, что движение заканчивается в заранее неизвестный момент времени, когда тело падает на землю. Если обозначить  , то в координатной форме мы имеем систему уравнений:
, то в координатной форме мы имеем систему уравнений:
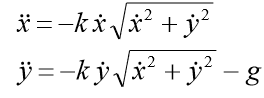
К системе следует добавить начальные условия:  (h начальная высота),
(h начальная высота),  . Положим
. Положим  . Тогда соответствующая система ОДУ 1 – го порядка примет вид:
. Тогда соответствующая система ОДУ 1 – го порядка примет вид:
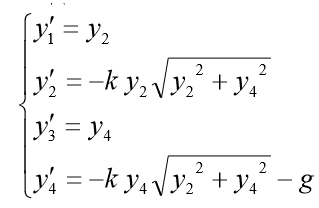
Для модельной задачи положим  . Опуская довольно обширное описание программы, приведу только листинг из комментариев к которому, думаю, будет ясен принцип её работы. В программу добавлен отсчёт времени работы для сравнительного анализа.
. Опуская довольно обширное описание программы, приведу только листинг из комментариев к которому, думаю, будет ясен принцип её работы. В программу добавлен отсчёт времени работы для сравнительного анализа.
Листинг программы
import numpy as np
import matplotlib.pyplot as plt
import time
start = time.time()
from scipy.integrate import ode
ts = [ ]
ys = [ ]
FlightTime, Distance, Height =0,0,0
y4old=0
def fout(t, y):# обработчик шага
global FlightTime, Distance, Height,y4old
ts.append(t)
ys.append(list(y.copy()))
y1, y2, y3, y4 = y
if y4*y4old<=0: # достигнута точка максимума
Height=y3
if y4<0 and y3<=0.0: # тело достигло поверхности
FlightTime=t
Distance=y1
return -1
y4old=y4
# функция правых частей системы ОДУ
def f(t, y, k): # имеется дополнительный аргумент k
g=9.81
y1, y2, y3, y4 = y
return [y2,-k*y2*np.sqrt(y2**2+y4**2), y4,-k*y4*np.sqrt(y2**2+y4**2)-g]
tmax=1.41 # максимально допустимый момент времени
alph=np.pi/4 # угол бросания тела
v0=10.0 # начальная скорость
K=[0.1,0.2,0.3,0.5] # анализируемые коэффициенты сопротивления
y0,t0=[0, v0*np.cos(alph), 0, v0*np.sin(alph)], 0 # начальные условия
ODE=ode(f)
ODE.set_integrator('dopri5', max_step=0.01)
ODE.set_solout(fout)
fig, ax = plt.subplots()
fig.set_facecolor('white')
for k in K: # перебор значений коэффициента сопротивления
ts, ys = [ ],[ ]
ODE.set_initial_value(y0, t0) # задание начальных значений
ODE.set_f_params(k) # передача дополнительного аргумента k # в функцию f(t,y,k) правых частей системы ОДУ
ODE.integrate(tmax) # решение ОДУ
print('Flight time = %.4f Distance = %.4f Height =%.4f '% (FlightTime,Distance,Height))
Y=np.array(ys)
plt.plot(Y[:,0],Y[:,2],linewidth=3,label='k=%.1f'% k)
stop = time.time()
plt.title("Результаты численного решения системы четырёх ОДУ n с использованием функци ode с атрибутом dopri5 ")
print ("Время на модельную задачу: %f"%(stop-start))
plt.grid(True)
plt.xlim(0,8)
plt.ylim(-0.1,2)
plt.legend(loc='best')
plt.show()
Получим:
Flight time = 1.2316 Distance = 5.9829 Height =1.8542
Flight time = 1.1016 Distance = 4.3830 Height =1.5088
Flight time = 1.0197 Distance = 3.5265 Height =1.2912
Flight time = 0.9068 Distance = 2.5842 Height =1.0240
Время на модельную задачу: 0.454787
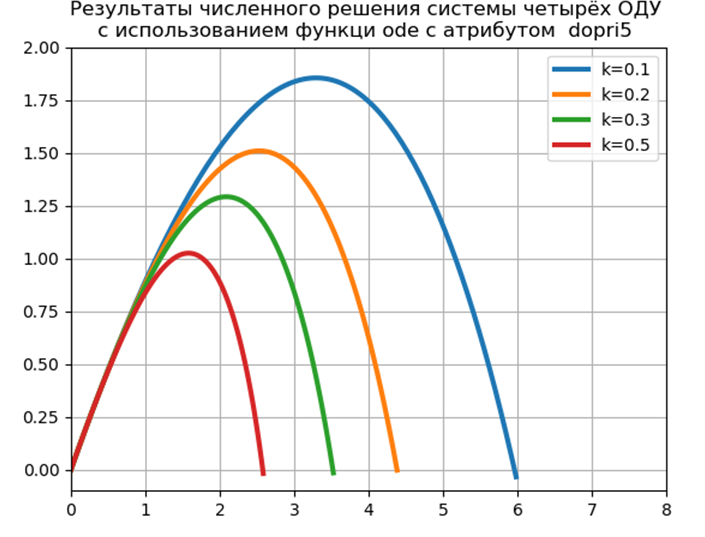
Для реализации средствами Python численного решения СДУ без использования специальных модулей, мною была предложена и исследована следующая функция:
def increment(f, t, y, tau
k1=tau*f(t,y)
k2=tau*f(t+(1/4)*tau,y+(1/4)*k1)
k3 =tau *f(t+(3/8)*tau,y+(3/32)*k1+(9/32)*k2)
k4=tau*f(t+(12/13)*tau,y+(1932/2197)*k1-(7200/2197)*k2+(7296/2197)*k3)
k5=tau*f(t+tau,y+(439/216)*k1-8*k2+(3680/513)*k3 -(845/4104)*k4)
k6=tau*f(t+(1/2)*tau,y-(8/27)*k1+2*k2-(3544/2565)*k3 +(1859/4104)*k4-(11/40)*k5)
return (16/135)*k1+(6656/12825)*k3+(28561/56430)*k4-(9/50)*k5+(2/55)*k6
Функция increment(f, t, y, tau) обеспечивает пятый порядок численного метода решения. Остальные особенности программы можно посмотреть в следующем листинге:
Листинг программы
from numpy import*
import matplotlib.pyplot as plt
import time
start = time.time()
def rungeKutta(f, to, yo, tEnd, tau):
def increment(f, t, y, tau):# поиск приближённого решения методом Рунге—Кутта—Фельберга.
k1=tau*f(t,y)
k2=tau*f(t+(1/4)*tau,y+(1/4)*k1)
k3 =tau *f(t+(3/8)*tau,y+(3/32)*k1+(9/32)*k2)
k4=tau*f(t+(12/13)*tau,y+(1932/2197)*k1-(7200/2197)*k2+(7296/2197)*k3)
k5=tau*f(t+tau,y+(439/216)*k1-8*k2+(3680/513)*k3 -(845/4104)*k4)
k6=tau*f(t+(1/2)*tau,y-(8/27)*k1+2*k2-(3544/2565)*k3 +(1859/4104)*k4-(11/40)*k5)
return (16/135)*k1+(6656/12825)*k3+(28561/56430)*k4-(9/50)*k5+(2/55)*k6
t = []#подготовка пустого списка t
y= []#подготовка пустого списка y
t.append(to)#внесение в список t начального значения to
y.append(yo)#внесение в список y начального значения yo
while to < tEnd:#внесение результатов расчёта в массивы t,y
tau = min(tau, tEnd - to)#определение минимального шага tau
yo = yo + increment(f, to, yo, tau) # расчёт значения в точке t0,y0 для задачи Коши
to = to + tau # приращение времени
t.append(to) # заполнение массива t
y.append(yo) # заполнение массива y
return array(t), array(y)
def f(t, y): # функция правых частей системы ОДУ
f = zeros([4])
f[0]=y[1]
f[1]=-k*y[1]*sqrt(y[1]**2+y[3]**2)
f[2]=y[3]
f[3]=-k*y[3]*sqrt(y[1]**2+y[3]**2) -g
if y[3]<0 and y[2]<=0.0: # тело достигло поверхности
return -1
return f
to = 0# начальный момент отсчёта времени
tEnd = 1.41# конечный момент отсчёта времени
alph=pi/4# угол бросания тела
v0=10.0 # начальная скорость
K=[0.1,0.2,0.3,0.5]# анализируемые коэффициенты сопротивления среды
g=9.81
yo = array([0.,v0*cos(alph),0.,v0*sin(alph)]) # начальные условия
tau =0.01# шаг
for i in K: # перебор значений коэффициента сопротивления среды
k=i
t, y = rungeKutta(f, to, yo, tEnd, tau)
y1=array([i[0] for i in y]) # извлечение переменных из массива y
y3=array([i[2] for i in y])
# визуализация сопротивление среды "к" и расчёт и визуализация s,h,t
plt.plot(y1,y3,linewidth=2,label='k=%.1f h=%.3f s=%.2f t=%s' % (k,max(y3),max(y1),round(t[list(y1).index(max(y1))],3)))
stop = time.time()
plt.title("Результаты численного решения системы четырёх ОДУ n с использованием адаптированного для Pythonn метода Рунге—Кутта—Фельберга ")
print ("Время на модельную задачу: %f"%(stop-start))
plt.xlabel('Высота h')
plt.ylabel('Расстояние s')
plt.legend(loc='best')
plt.xlim(0,8)
plt.ylim(-0.1,2)
plt.grid(True)
plt.show()
Получим:
Время на модельную задачу: 0.259927
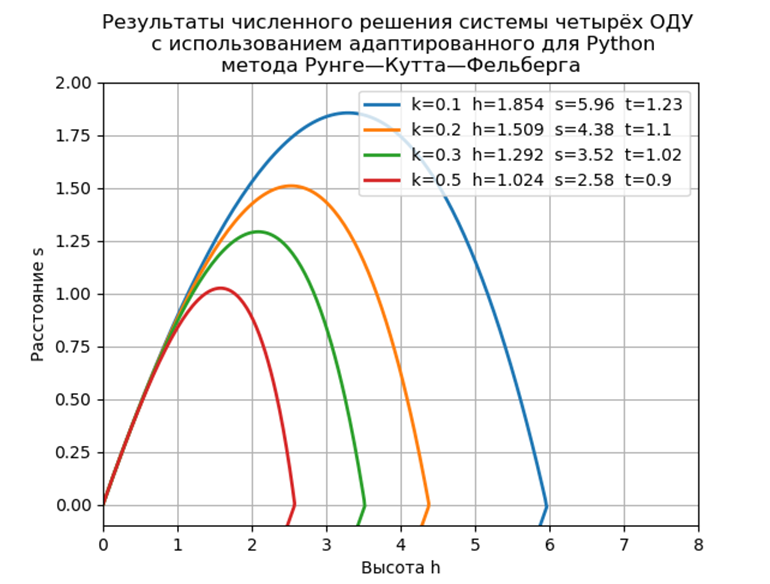
Вывод
Предложенная программная реализация модельной задачи без использования специальных модулей имеет почти в двое большее быстродействие, чем с функцией ode, однако нельзя забывать, что ode имеет более высокую точность численного решения и возможности выбора метода решения.
Решение краевой задачи с поточно разделёнными краевыми условиями
Приведем пример некоторой конкретной краевой задачи с поточно разделенными краевыми условиями:
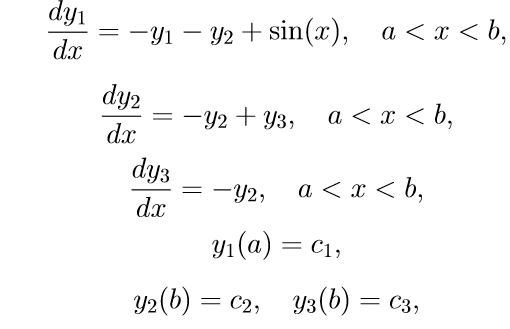 (11)
(11)
Для решения задачи (11) используем следующий алгоритм:
1. Решаем первые три неоднородные уравнения системы (11) с начальными условиями

Введем обозначение для решения задачи Коши:

2. Решаем первые три однородные уравнения системы (11) с начальными условиями

Введем обозначение для решения задачи Коши:

3. Решаем первые три однородные уравнения системы (11) с начальными условиями

Введем обозначение для решения задачи Коши:

4. Общее решение краевой задачи (11) при помощи решений задач Коши записывается в виде линейной комбинации решений:

где p2, p3 — некоторые неизвестные параметры.
5. Для определения параметров p2, p3, используем краевые условия последних двух уравнений (11), то есть условия при x = b. Подставляя, получим систему линейных уравнений относительно неизвестных p2, p3:
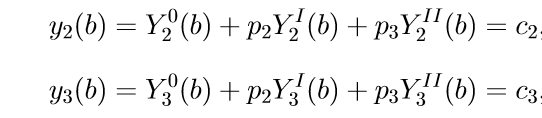 (12)
(12)
Решая (12), получим соотношения для p2, p3.
По приведенному алгоритму с применением метода Рунге—Кутта—Фельберга получим следующую программу:
Листинг программы
# Метод пристрелки
from numpy import*
import matplotlib.pyplot as plt
import matplotlib.font_manager as fm,os
import matplotlib.patches as mpatches
import matplotlib.lines as mlines
from scipy.integrate import odeint
from scipy import linalg
import time
start = time.time()
c1 = 1.0
c2 = 0.8
c3 = 0.5
a =0.0
b = 1.0
nn =100
initial_state_0 =array( [a, c1, 0.0, 0.0])
initial_state_I =array( [a, 0.0, 1.0, 0.0])
initial_state_II =array( [a, 0.0, 0.0, 1.0])
to = a
tEnd =b
N = int(nn)
tau=(b-a)/N
def rungeKutta(f, to, yo, tEnd, tau):
def increment(f, t, y, tau):
k1=tau*f(t,y)
k2=tau*f(t+(1/4)*tau,y+(1/4)*k1)
k3 =tau *f(t+(3/8)*tau,y+(3/32)*k1+(9/32)*k2)
k4=tau*f(t+(12/13)*tau,y+(1932/2197)*k1-(7200/2197)*k2+(7296/2197)*k3)
k5=tau*f(t+tau,y+(439/216)*k1-8*k2+(3680/513)*k3 -(845/4104)*k4)
k6=tau*f(t+(1/2)*tau,y-(8/27)*k1+2*k2-(3544/2565)*k3 +(1859/4104)*k4-(11/40)*k5)
return (16/135)*k1+(6656/12825)*k3+(28561/56430)*k4-(9/50)*k5+(2/55)*k6
t = []
y= []
t.append(to)
y.append(yo)
while to < tEnd:
tau = min(tau, tEnd - to)
yo = yo + increment(f, to, yo, tau)
to = to + tau
t.append(to)
y.append(yo)
return array(t), array(y)
def f(t, y):
global theta
f = zeros([4])
f[0] = 1
f[1] = -y [1]-y[2] +theta* sin(y[0])
f[2] = -y[2]+y[3]
f[3] = -y[2]
return f
# Решение НЕОДНОРОДНОЙ системы -- theta = 1
theta = 1.0
yo =initial_state_0
t, y = rungeKutta(f, to, yo, tEnd, tau)
y2=[i[2] for i in y]
y3=[i[3] for i in y]
# Извлечение требуемых для решения задачи значений
# Y20 = Y2(b), Y30 = Y3(b)
Y20 = y2[N-1]
Y30 = y3[N-1]
# Решение ОДНОРОДНОЙ системы -- theta = 0, задача I
theta = 0.0
yo= initial_state_I
t, y = rungeKutta(f, to, yo, tEnd, tau)
y2=[i[2] for i in y]
y3=[i[3] for i in y]
# Извлечение требуемых для решения задачи значений
# Y21= Y2(b), Y31 = Y3(b)
Y21= y2[N-1]
Y31 = y3[N-1]
# Решение ОДНОРОДНОЙ системы -- theta = 0, задача II
theta = 0.0
yo =initial_state_II
t, y = rungeKutta(f, to, yo, tEnd, tau)
y2=[i[2] for i in y]
y3=[i[3] for i in y]
# Извлечение требуемых для решения задачи значений
# Y211= Y2(b), Y311 = Y3(b)
Y211= y2[N-1]
Y311 = y3[N-1]
# Формирование системы линейных
# АЛГЕБРАИЧЕСКИХ уравнений для определния p2, p3
b1 = c2 - Y20
b2 = c3 - Y30
A = array([[Y21, Y211], [Y31, Y311]])
bb = array([[b1], [b2]])
# Решение системы
p2, p3 = linalg.solve(A, bb)
# Окончательное решение краевой
# НЕОДНОРОДНОЙ задачи, theta = 1
theta = 1.0
yo = array([a, c1, p2, p3])
t, y = rungeKutta(f, to, yo, tEnd, tau)
y0=[i[0] for i in y]
y1=[i[1] for i in y]
y2=[i[2] for i in y]
y3=[i[3] for i in y]
# Проверка
print('y0[0]=', y0[0])
print('y1[0]=', y1[0])
print('y2[0]=', y2[0])
print('y3[0]=', y3[0])
print('y0[N-1]=', y0[N-1])
print('y1[N-1]=', y1[N-1])
print('y2[N-1]=', y2[N-1])
print('y3[N-1]=', y3[N-1])
j = N
xx = y0[:j]
yy1 = y1[:j]
yy2 = y2[:j]
yy3 = y3[:j]
stop = time.time()
print ("Время на модельную задачу: %f"%(stop-start))
plt.subplot(2, 1, 1)
plt.plot([a], [c1], 'ro')
plt.plot([b], [c2], 'go')
plt.plot([b], [c3], 'bo')
plt.plot(xx, yy1, color='r') #Построение графика
plt.plot(xx, yy2, color='g') #Построение графика
plt.plot(xx, yy3, color='b') #Построение графика
plt.xlabel(r'$x$') #Метка по оси x в формате TeX
plt.ylabel(r'$y_k(x)$') #Метка по оси y в формате TeX
plt.title(r'Метод пристрелки ', color='blue')
plt.grid(True) #Сетка
patch_y1 = mpatches.Patch(color='red',
label='$y_1$')
patch_y2 = mpatches.Patch(color='green',
label='$y_2$')
patch_y3 = mpatches.Patch(color='blue',
label='$y_3$')
plt.legend(handles=[patch_y1, patch_y2, patch_y3])
ymin, ymax = plt.ylim()
xmin, xmax = plt.xlim()
plt.subplot(2, 1, 2)
font = {'family': 'serif',
'color': 'blue',
'weight': 'normal',
'size': 12,
}
plt.text(0.2, 0.8, r'$frac{dy_1}{dx}= - y_1 - y_2 + sin(x),$',
fontdict=font)
plt.text(0.2, 0.6,r'$frac{dy_2}{dx}= - y_1 + y_3,$',
fontdict=font)
plt.text(0.2, 0.4, r'$frac{dy_3}{dx}= - y_2 - y_2,$',
fontdict=font)
plt.text(0.2, 0.2, r'$y_1(a)=c_1, '
r'quad y_2(b)=c_2, quad y_3(b)=c_3.$',
fontdict=font)
plt.subplots_adjust(left=0.15)
plt.show()
Получим:
y0[0]= 0.0
y1[0]= 1.0
y2[0]= 0.7156448588231397
y3[0]= 1.324566562303714
y0[N-1]= 0.9900000000000007
y1[N-1]= 0.1747719838716767
y2[N-1]= 0.8
y3[N-1]= 0.5000000000000001
Время на модельную задачу: 0.070878
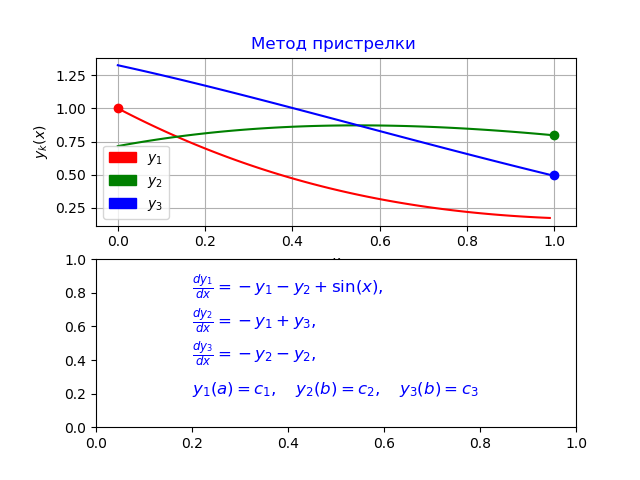
Вывод
Разработанная мною программа отличается от приведенной в [3] меньшей погрешностью, что подтверждает приведенный в начале статьи сравнительный анализ функции odeint с реализованным на Python метода Рунге—Кутта—Фельберга.
Ссылки:
1. Численное решение математических моделей объектов, заданных составными системами дифференциальных уравнений.
2. Введение в научный Python.
3. Н.М. Полякова, Е.В. Ширяева Python 3. Создание графического интерфейса пользователя (на примере решения методом пристрелки краевой задачи для линейных обыкновенных дифференциальных уравнений). Ростов-на-Дону 2017.
