Содержание
Кривизна и кручение. Натуральные уравнения кривой
Краткие теоретические сведения
Кривизна кривой
Кривизной $k$ кривой в данной точке называют модуль скорости вращения касательной по отношению к длине дуги.
Регулярная дважды дифференцируемая без особых точек кривая $gamma$, заданная векторной функцией $vec{r}=vec{r}(t)$, имеет в каждой точке определенную кривизну, причем
$$
|k(t)|=frac{|vec{r’}(t)times vec{r”}(t)|}{|vec{r'(t)}|^3}.
$$
Для кривой, заданной параметрически
$$ x=x(t), ,, y=y(t), ,, z=z(t), $$
кривизна в точке $P(t=t_0)$ находится по формуле:
$$
k^2(t_0)=frac{left| begin{array}{cc}
y’ & z’ \
y”& z” \
end{array}
right|^2+left| begin{array}{cc}
z’ & x’ \
z”& x” \
end{array}
right|^2+left| begin{array}{cc}
x’ & y’ \
x” & y” \
end{array}
right|^2}{Bigl((x’)^2+(y’)^2+(z’)^2Bigr)^3},
$$
где все производные вычисляются при $t=t_0$.
Если кривая задана естественной параметризацией $vec{r}=vec{r}(s)$, то векторы $vec{r’}(s)$ и $vec{r”}(s)$ перпендикулярны, причем $|vec{r’}(s)|=1$. Тогда выражение для кривизны принимает вид:
$$
k(s)= |vec{r”}(s)|.
$$
?
Что вы скажете о кривой, которая в каждой свой точке имеет нулевую кривизну?
Для плоской кривой, лежащей в плоскости $(xy)$, кривизну можно найти по формулам:
$$
begin{array}{rl}
x=x(t), y=y(t):& k = displaystylefrac{|x’y”-x”y’|}{left((x’)^2+(y’)^2right)^{3/2}}, \
y=y(x):& k = displaystylefrac{|y”|}{left(1+(y’)^2right)^{3/2}}, \
rho=rho(varphi):& k = displaystylefrac{|rho^2+2(rho’)^2-rhorho”|}{left(rho^2+(rho’)^2right)^{3/2}}.\
end{array}
$$
Кручение
Абсолютным кручением $varkappa$ кривой называют скорость вращения соприкасающейся плоскости вокруг касательной.
$$
|varkappa (t)|=frac{|(vec{r’}(t), vec{r”}(t), vec{r”’}(t))|}{|vec{r’}(t)times vec{r”}(t)|^2}.
$$
В случае естественной параметризации
$$
|varkappa(s)|=frac{|(vec{r’}(s), vec{r”}(s), vec{r”’}(s))|}{k^2(s)}
$$
Для плоской кривой кручение равно нулю: $varkappa=0$!
Натуральные уравнения кривой
Если кривая задана естественной параметризацией $vec{r}=vec{r}(s)$, то кривизна и кручение будут являться функциями длины дуги
$$
k=k(s), quad varkappa=varkappa(s).
$$
Система этих двух соотношений называется натуральными уравнениями кривой.
Натуральные уравнения полностью определяют форму кривой, ибо связывают инварианты, которые не меняются при преобразовании координат (при изменении положения указанной кривой в пространстве относительно системы координат).
Решение задач
Задача 1 (Феденко №351)
Найдите кривизну кривой:
$$
x=a,mbox{cos}^3t,,,y=a,mbox{sin}^3t.
$$
Задача 2 (Феденко №380)
Найдите параболу $y=ax^2+bx+c$, имеющую с синусоидой $y=mbox{sin}x$ в точке $A(pi/2,1)$ общие касательную и кривизну.
Задача 3 (Феденко №405)
Составьте натуральные уравнения кривой:
$$
x=a(mbox{cos},t+t,mbox{sin},t), ,, y=a(mbox{sin},t-t,mbox{cos},t).
$$
Краткое решение задачи 3
$$
s=frac{at^2}{2}.
$$
$$
k=frac{1}{at}.
$$
$$
t=frac{1}{ak} Rightarrow s= frac{1}{2ak^2}.
$$
Натуральные уравнения:
$$
k=frac{1}{at},,,s=frac{at^2}{2}
$$
или
$$
k^2=frac{1}{2as}.
$$
Феденко записывает ответы через радиус кривизны:
$R=frac{1}{k}$.
Задача 4 (Феденко №486, №514)
Найдите кривизну и кручение, составьте натуральные уравнения кривой:
$$
x=a,mbox{ch}t, , y=a,mbox{sh}t, , z=a, t.
$$
Решение задачи 4
Задачу можно решать двумя способами:
1 способ. Найти $k(t), varkappa(t), s(t)$.
2 способ. Сначала найти выразить $t$ через $s$ и записать естественную параметризацию кривой $vec{r}=vec{r}(s)$. А далее найти $k(s)$ и $varkappa(s)$.
Воспользуемся первым способом.
begin{gather*}
vec{r}(t_0)={a,mbox{ch}t, , a,mbox{sh}t, , at},\
vec{r’}(t_0)={a,mbox{sh}t, , a,mbox{ch}t, , a},\
vec{r”}(t_0)={a,mbox{ch}t, , a,mbox{sh}t, , 0}\
vec{r”’}(t_0)={a,mbox{sh}t, , a,mbox{ch}t, , 0}.
end{gather*}
$$
Rightarrow quad k^2(t) = frac{1}{4a^2mbox{ch}^4t}.
$$
$$
Rightarrow quad k(t) = frac{1}{2a,mbox{ch}^2t}.
$$
begin{equation*}
varkappa(t) = frac{ left|
begin{array}{ccc}
a,mbox{sh}t & a,mbox{ch}t & a \
a,mbox{ch}t & a,mbox{sh}t & 0 \
a,mbox{sh}t & a,mbox{ch}t & 0 \
end{array}
right|}{a^4cdot 2mbox{ch}^2t} = frac{1}{2a,mbox{ch}^2t}.
end{equation*}
В задаче №473 была та же кривая и мы получили, что
$$s=asqrt{2},mbox{sh},t.$$
Используя тождества для гиперболических функций, выразим $t$ через $s$ и подставим их в выражения для кривизны и кручения:
begin{equation*}
s=asqrt{2},mbox{sh}t=asqrt{2},sqrt{mbox{ch}^2t-1} ,, Rightarrow ,, mbox{ch}^2t=frac{s^2}{2a^2}+1 ,, Rightarrow
end{equation*}
begin{equation*}
k(s)=varkappa(s)=frac{1}{2a,mbox{ch}^2t} = frac{a}{s^2+2a^2}.
end{equation*}
Вычисления сделаны для $a>0$.
Задача 5 (Феденко №496)
Найдите функцию $f(t)$, для которой данная кривая — плоская:
$$
vec{r}(t)={a,mbox{cos}t, , a,mbox{sin}t, , f(t)}
$$
Решение задачи 5
$$
begin{array}{lll}
x=a,mbox{cos}t,, &y=a,mbox{sin}t, , &z=f(t),\
x’=-a,mbox{sin}t, , &y’=a,mbox{cos}t, , &z’=f'(t),\
x”=-a,mbox{cos}t, , &y”=-a,mbox{sin}t, , &z”=f”(t),\
x”’=a,mbox{sin}t, , &y”’=-a,mbox{cos}t, , &z”’=f”'(t).
end{array}
$$
Для плоской кривой кручение равно нулю:
begin{equation*}
varkappa(t) = left|
begin{array}{rrr}
-a,mbox{sin}t & a,mbox{cos}t & f'(t) \
-a,mbox{cos}t & -a,mbox{sin}t & f”(t) \
a,mbox{sin}t & -a,mbox{cos}t & f”'(t) \
end{array}
right| = left( f'(t) + f”'(t) right)cdot2a^2=0.
end{equation*}
begin{equation*}
f'(t)=-f”'(t) quad Rightarrow quad f(t)=c_1+c_2,mbox{sin}t+c_3,mbox{cos}t.
end{equation*}
?
Как найти уравнение плоскости, в которой лежит кривая?
Известно, что плоская кривая лежит в своей соприкасающейся плоскости!
Второй способ — составить уравнение плоскости по трем точкам.
Натуральные уравнения — соотношения на кривизну и кручение бирегулярных кривых. Замечательное свойство натуральных уравнений в том, что по ним можно однозначно восстановить кривую.
Натуральные уравнения, уравнения, выражающие кривизну  и кручение
и кручение  кривой как функции её дуги:
кривой как функции её дуги:  ,
,  . Наименование «Натуральные уравнения» объясняется тем обстоятельством, что функции
. Наименование «Натуральные уравнения» объясняется тем обстоятельством, что функции  и
и  не зависят от положения кривой в пространстве (от выбора системы координат), а зависят только от формы кривой. Две трижды непрерывно дифференцируемые кривые, имеющие одинаковые натуральные уравнения, могут отличаться друг от друга только положением в пространстве. Иначе говоря, форма кривой однозначно определяется её натуральными уравнениями. Если заданы две непрерывные функции и , из которых первая положительная, то всегда существует кривая, для которой данные функции являются соответственно кривизной и кручением.
не зависят от положения кривой в пространстве (от выбора системы координат), а зависят только от формы кривой. Две трижды непрерывно дифференцируемые кривые, имеющие одинаковые натуральные уравнения, могут отличаться друг от друга только положением в пространстве. Иначе говоря, форма кривой однозначно определяется её натуральными уравнениями. Если заданы две непрерывные функции и , из которых первая положительная, то всегда существует кривая, для которой данные функции являются соответственно кривизной и кручением.
Натуральные уравнения плоских кривых[править | править код]
Пусть  — произвольная гладкая функция. В таком случае существует кривая
— произвольная гладкая функция. В таком случае существует кривая  , единственная с точностью до сохраняющего ориентацию движения плоскости, параметризованная натуральным параметром
, единственная с точностью до сохраняющего ориентацию движения плоскости, параметризованная натуральным параметром  и такая, что
и такая, что  во всех точках кривой. Здесь величина
во всех точках кривой. Здесь величина  — ориентированная кривизна кривой .
— ориентированная кривизна кривой .
Натуральные уравнения в трехмерном пространстве[править | править код]
Пусть и  — две произвольные гладкие функции, причём положительна. Тогда существует кривая , параметризованная натуральным параметром , кривизна и кручение которой равны в каждой точке и соответственно. Такая кривая единственна с точностью до движения пространства, сохраняющего ориентацию.
— две произвольные гладкие функции, причём положительна. Тогда существует кривая , параметризованная натуральным параметром , кривизна и кручение которой равны в каждой точке и соответственно. Такая кривая единственна с точностью до движения пространства, сохраняющего ориентацию.
Мы видели, что если кривизна и кручение кривой в ![]() постоянны, то можно восстановить кривую (винтовую линию ) с данными
постоянны, то можно восстановить кривую (винтовую линию ) с данными ![]() С точностью до движения в пространстве. Оказывается, этот факт справедлив и в общей ситуации, когда кривизна и кручение не являются постоянными.
С точностью до движения в пространстве. Оказывается, этот факт справедлив и в общей ситуации, когда кривизна и кручение не являются постоянными.
Теорема. Пусть ![]() – любые регулярные функции, причем
– любые регулярные функции, причем ![]() . Тогда существует и притом единственная, с точностью до движения в пространстве, кривая, для которой
. Тогда существует и притом единственная, с точностью до движения в пространстве, кривая, для которой ![]() является кривизной, а
является кривизной, а ![]() – кручением в точке, соответствующей дуге
– кручением в точке, соответствующей дуге ![]() .
.
1). Докажем сначала существование кривой. Рассмотрим систему уравнений, которой должны удовлетворять в силу формул Френе векторы касательной ![]() , главной нормали
, главной нормали ![]() , и бинормали
, и бинормали ![]() искомой кривой.
искомой кривой.
 .
.
Пусть ![]() – начальные условия, причем векторы
– начальные условия, причем векторы ![]() образуют ортонормированный правый репер в точке кривой, отвечающей значению
образуют ортонормированный правый репер в точке кривой, отвечающей значению ![]() . Поскольку функции
. Поскольку функции ![]() регулярны, то из общей теории ODE следует, что существует и единственно решение данной системы дифференциальных уравнений первого порядка с данными начальными условиями. Покажем, что решение
регулярны, то из общей теории ODE следует, что существует и единственно решение данной системы дифференциальных уравнений первого порядка с данными начальными условиями. Покажем, что решение ![]() образует ортонормированный правый репер при любом
образует ортонормированный правый репер при любом ![]() . Для этого вычислим
. Для этого вычислим ![]() . Используя уравнения системы Френе, получим
. Используя уравнения системы Френе, получим 
Анализируя эту систему уравнений видим, что она удовлетворяется значениями ![]() С другой стороны, она удовлетворяется значениями
С другой стороны, она удовлетворяется значениями ![]() . Оба решения совпадают при
. Оба решения совпадают при![]() , следовательно, по теореме единственности, решения совпадают тождественно. Кроме того,
, следовательно, по теореме единственности, решения совпадают тождественно. Кроме того, ![]() при всех
при всех ![]() образуют правую тройку, так как детерминант, составленный из них, является непрерывной функцией и может принимать значения
образуют правую тройку, так как детерминант, составленный из них, является непрерывной функцией и может принимать значения ![]() или –1. Но в точке
или –1. Но в точке ![]() он равен
он равен ![]() , следовательно, и при всех
, следовательно, и при всех ![]() он должен быть равен +1.
он должен быть равен +1.
После того, как восстановлен сопровождающий репер Френе искомой кривой, нетрудно восстановить и саму кривую :  .
.
Проверим, что эта кривая имеет в качестве натуральных уравнений функции ![]() . Во-первых, ясно, что
. Во-первых, ясно, что ![]() является дугой на
является дугой на ![]() , т. к.
, т. к. ![]() Кривизна найденной линии равна
Кривизна найденной линии равна ![]() Кручение равно
Кручение равно
![]()
2). Докажем единственность (с точностью до движения в ![]() ) найденной кривой. Пусть кривые
) найденной кривой. Пусть кривые ![]() и
и ![]() имеют одинаковые натуральные уравнения
имеют одинаковые натуральные уравнения ![]() и их сопровождающие реперы Френе кривых при
и их сопровождающие реперы Френе кривых при ![]() таковы :
таковы : ![]() и
и ![]() . Существует матрица
. Существует матрица ![]() , такая, что
, такая, что ![]() Кроме того, нетрудно проверить, что если
Кроме того, нетрудно проверить, что если ![]() – решение системы уравнений Френе, то
– решение системы уравнений Френе, то ![]() есть другое решение той же системы. В силу единственности решения,
есть другое решение той же системы. В силу единственности решения, ![]()
![]() при всех
при всех ![]() . Интегрируя первое из этих уравнений, получим
. Интегрируя первое из этих уравнений, получим ![]() , где
, где ![]() . Таким образом, кривая
. Таким образом, кривая ![]() получается из
получается из ![]() движением в
движением в ![]() ,ч. т.д.
,ч. т.д.
Литература. А. В. Погорелов. гл. 3, параграф 4.
| < Предыдущая | Следующая > |
|---|
Лекция 3
Формулы Френе.
Кривизна и кручение кривой в произвольной
параметризации. Винтовая линия.
Р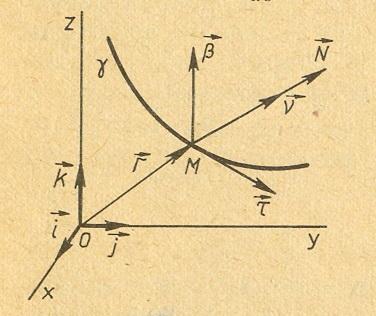 ассмотрим
ассмотрим
векторы
![]()
гладкой линии
![]()
заданной естественной параметризацией
![]() .
.
1). Так как
![]() то
то
![]() (1)
(1)
2). Вектор
![]()
– единичный вектор гладкой нормали
![]()
параллелен
спрямляющей плоскости
![]()
3).
![]() .
.
В (1) заменяем
![]()
и
![]()
по формулам (3) и (2). Получим
![]()
Подставим выражение
![]()
в (2).
![]()
4).
![]() .
.
Дифференцируем по s:
![]()
=
![]() .
.
Заменим
![]()
и
![]()
их выражениями по (3) и (4):
![]()
![]()
Формулы (3),(4),(5)
называются формулами Френе, которые
рассматривают связь между базисными
векторами сопровождающими треугольниками,
кручением и кривизной линии.
Определение 3.1.
Число
![]()
называется кручением линии
![]()
в точке М
на всей линии
![]() .
.
Кручение есть функция параметра S.
Исходя из (5) и так
как
![]() –
–
единичный вектор, то
![]() .
.
Кручение больше 0 тогда и только тогда,
когда
![]() и
и
![]()
противоположно направлены.
Геометрический
смысл кручения.
Модуль кручения
в данной точке кривой есть скорость
изменения направления функции b(S)
по отношению к естественному параметру
S.
Так как вектор b=b(S)
перпендикулярен соприкасающейся
плоскости, то абсолютная величина
кручения характеризует скорость
изменения положения соприкасающейся
плоскости по отношению к параметру S.
Если линия задана
в естественной параметризации, то
кривизна и кручение есть функция по
параметру S:
![]()
![]() .Уравнения
.Уравнения
такого вида называются натуральными
уравнениями кривой и характеризуют
кривую с точностью до движения, так как
если у двух кривых натуральные уравнение
совпадают, то кривые отличны только
положением в пространстве. Если у двух
кривых натуральные уравнения совпадают,
то на каждой из них существует естественная
параметризация, такая что в точках с
одинаковыми параметрами кривизна и
кручение одинаковы.
Вычислительная
формула для кручения линии заданной в
естественной параметризации.
![]() –
–
продифференцируем
это равенство. Используем (5).
![]()
В
ыразим смешанное произведение
векторов производных:
![]()
![]() формула
формула
кручения (6)
Определение 3.2.
Линия называется плоской, если все её
точки принадлежат некоторой плоскости
![]() .
.
Если во всех точках
гладкой плоской линии кручение равно
нулю.
Произвольная
параметризация.
Пусть кривая
![]()
задана произвольной параметризацией
своими параметрическими уравнениями:
![]()
Рассмотрим возможную
замену параметра t
на s,
причем функция s=h(t)
является допустимой заменой параметра
![]() -1
-1![]()
![]()
![]() :
:
![]() -1
-1
![]()
Найдем
![]()

![]() Вектор
Вектор
второй производной
![]() параллелен
параллелен
соприкасающейся плоскости, так как он
выражен через вектор
![]()
и
![]() .
.
Рассмотрим векторное
произведение первой и второй производной.

Винтовая линия
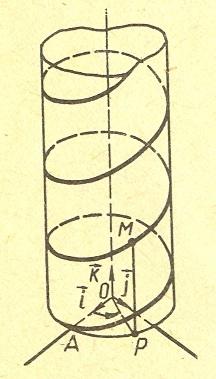 Винтовая
Винтовая
линия получена путем равномерного
вращения М
(х,у,z)
![]()
около оси Оz
и равномерного движения параллельно
оси Оz.
Является гладкой линией класса
![]() .
.
Параметрические
уравнения винтовой линии:
![]()
Направляющая винтовой линии совпадает
с направляющей кругового цилиндра (ОХУ:
![]() ,
,
значит, винтовая линия лежит на прямом
круговом цилиндре с осью Оz.
Векторное уравнение
винтовой линии:
![]() .
.
Используя формулу
![]() ,
,
имеем:
![]() .
.
Таким образом,
![]() .
.
Через М![]()
проходит прямолинейная образующая МР
цилиндра, имеющая направляющий вектор
![]()
Так как
![]() ,
,
то винтовая линия пересекает все
образующие под постоянным углом (углом
между кривой и прямой называется угол
между касательной к этой кривой и данной
прямой).
Длина дуги винтовой
линии равна
![]() .
.
Вектор главной
нормали:
![]()
Так как
![]()
(по формуле Френе), то
![]()
(k
– кривизна винтовой линии).
Главная нормаль
винтовой линии в точке М
есть
перпендикуляр к оси цилиндра, проведенный
через точку М,
т.к.
![]()
где Р
– проекция М
на ОХУ.
Вектор главной нормали направлен
противоположно вектору
![]()
Кручение винтовой
линии:
![]() .
.
Знак кручения совпадает со знаком числа
b.
Винтовая линия
является частным случаем достаточно
широкого класса линий, называемых
кривыми Бертрана. Гладкая линия
![]()
называется кривой Бертрана, если для
нее существует другая гладкая линия
![]()
и такое отображение
![]() ,
,
что в каждой паре соответствующих точек
линии
![]()
и
![]()
имеют общую главную нормаль.
Соседние файлы в папке вопрос 14
- #
- #
- #
VMath
Инструменты сайта
Основное
Навигация
Информация
Действия
Содержание
Кривизна и кручение. Натуральные уравнения кривой
Краткие теоретические сведения
Кривизна кривой
Кривизной $k$ кривой в данной точке называют модуль скорости вращения касательной по отношению к длине дуги.
Регулярная дважды дифференцируемая без особых точек кривая $gamma$, заданная векторной функцией $vec=vec(t)$, имеет в каждой точке определенную кривизну, причем $$ |k(t)|=frac<|vec(t)times vec(t)|><|vec|^3>. $$
Для кривой, заданной параметрически $$ x=x(t), ,, y=y(t), ,, z=z(t), $$ кривизна в точке $P(t=t_0)$ находится по формуле: $$ k^2(t_0)=frac<left| begin y’ & z’ \ y”& z” \ end right|^2+left| begin z’ & x’ \ z”& x” \ end right|^2+left| begin x’ & y’ \ x” & y” \ end right|^2><Bigl((x’)^2+(y’)^2+(z’)^2Bigr)^3>, $$ где все производные вычисляются при $t=t_0$.
Если кривая задана естественной параметризацией $vec=vec(s)$, то векторы $vec(s)$ и $vec(s)$ перпендикулярны, причем $|vec(s)|=1$. Тогда выражение для кривизны принимает вид: $$ k(s)= |vec(s)|. $$
Что вы скажете о кривой, которая в каждой свой точке имеет нулевую кривизну?
Кручение
Абсолютным кручением $varkappa$ кривой называют скорость вращения соприкасающейся плоскости вокруг касательной. $$ |varkappa (t)|=frac<|(vec(t), vec(t), vec(t))|><|vec(t)times vec(t)|^2>. $$
В случае естественной параметризации $$ |varkappa(s)|=frac<|(vec(s), vec(s), vec(s))|> $$
Натуральные уравнения кривой
Если кривая задана естественной параметризацией $vec=vec(s)$, то кривизна и кручение будут являться функциями длины дуги $$ k=k(s), quad varkappa=varkappa(s). $$ Система этих двух соотношений называется натуральными уравнениями кривой.
Натуральные уравнения полностью определяют форму кривой, ибо связывают инварианты, которые не меняются при преобразовании координат (при изменении положения указанной кривой в пространстве относительно системы координат).
Решение задач
Задача 1 (Феденко №351)
Найдите кривизну кривой: $$ x=a,mbox^3t,,,y=a,mbox^3t. $$
Задача 2 (Феденко №380)
Найдите параболу $y=ax^2+bx+c$, имеющую с синусоидой $y=mboxx$ в точке $A(pi/2,1)$ общие касательную и кривизну.
Задача 3 (Феденко №405)
Составьте натуральные уравнения кривой: $$ x=a(mbox,t+t,mbox,t), ,, y=a(mbox,t-t,mbox,t). $$
Краткое решение задачи 3
Натуральные уравнения: $$ k=frac<1>,,,s=frac <2>$$ или $$ k^2=frac<1><2as>. $$
Феденко записывает ответы через радиус кривизны: $R=frac<1>$.
Задача 4 (Феденко №486, №514)
Найдите кривизну и кручение, составьте натуральные уравнения кривой: $$ x=a,mboxt, , y=a,mboxt, , z=a, t. $$
Решение задачи 4
Задачу можно решать двумя способами:
1 способ. Найти $k(t), varkappa(t), s(t)$.
2 способ. Сначала найти выразить $t$ через $s$ и записать естественную параметризацию кривой $vec=vec(s)$. А далее найти $k(s)$ и $varkappa(s)$.
В задаче №473 была та же кривая и мы получили, что $$s=asqrt<2>,mbox,t.$$ Используя тождества для гиперболических функций, выразим $t$ через $s$ и подставим их в выражения для кривизны и кручения: begin s=asqrt<2>,mboxt=asqrt<2>,sqrt<mbox^2t-1> ,, Rightarrow ,, mbox^2t=frac<2a^2>+1 ,, Rightarrow end begin k(s)=varkappa(s)=frac<1><2a,mbox^2t> = frac. end
Вычисления сделаны для $a>0$.
Задача 5 (Феденко №496)
Найдите функцию $f(t)$, для которой данная кривая — плоская: $$ vec(t)=t, , a,mboxt, , f(t)> $$
Решение задачи 5
Для плоской кривой кручение равно нулю: begin varkappa(t) = left| begin -a,mboxt & a,mboxt & f'(t) \ -a,mboxt & -a,mboxt & f”(t) \ a,mboxt & -a,mboxt & f”'(t) \ end right| = left( f'(t) + f”'(t) right)cdot2a^2=0. end begin f'(t)=-f”'(t) quad Rightarrow quad f(t)=c_1+c_2,mboxt+c_3,mboxt. end
Как найти уравнение плоскости, в которой лежит кривая?
Известно, что плоская кривая лежит в своей соприкасающейся плоскости! Второй способ — составить уравнение плоскости по трем точкам.
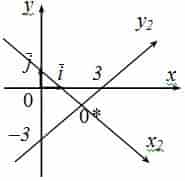
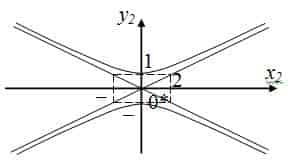
Приведение кривой второго порядка к каноническому виду
Пример №1 . Привести уравнение второго порядка к каноническому виду с помощью поворота и параллельного переноса осей координат. Построить кривую.
Пример №2 . Выполнив последовательно преобразования координат: поворот, а затем параллельный перенос координатных осей, преобразовать к каноническому виду уравнение кривой второго порядка и построить ее в исходной системе координат, а также найти параметры кривой.
Алгоритм перехода кривой второго порядка к каноническому виду

Пример №1 . 4y=-6-sqrt(4x-x 2 )
sqrt(4x-x 2 ) = -(4y+6)
Возведем в квадрат
4x-x 2 = (4y+6) 2
Раскрывая скобки, получаем:
16y 2 +48y + 36 +x 2 -4x = 0
Далее решается калькулятором. Если самостоятельно решать, то получим:
4x-x 2 = (4y+6) 2
-(x 2 – 4x) = 2(y+3/2) 2
-(x 2 – 4x + 4) = (y+3/2) 2
-(x – 2) 2 = (y+3/2) 2
(y+3/2) 2 + (x – 2) 2 = 0
Пример №2 . x=1-2/3 sqrt(y 2 -4y-5)
Здесь надо сначала привести к нормальному виду.
3/2(x-1)=sqrt(y 2 -4y-5)
Возводим в квадрат
9/4(x-1) 2 =y 2 -4y-5
9/4x 2 -9/4*2x+9/4-y 2 +4y+5=0
9/4x 2 -9/2x-y 2 +4y+29/4=0
Далее можно решать как с калькулятором, так и без него:
9/4(x-1) 2 =y 2 -4y-5
9/4(x-1) 2 =y 2 -4y+4-4-5
9/4(x-1) 2 =(y 2 -2)-9
9/4(x-1) 2 -(y 2 -2) = -9
-1/4(x-1) 2 +1/9(y 2 -2) = 1
Калькулятор Обыкновенных Дифференциальных Уравнений (ОДУ) и Систем (СОДУ)
Порядок производной указывается штрихами — y”’ или числом после одного штриха — y’5
Ввод распознает различные синонимы функций, как asin , arsin , arcsin
Знак умножения и скобки расставляются дополнительно — запись 2sinx сходна 2*sin(x)
Список математических функций и констант :
• ln(x) — натуральный логарифм
• sh(x) — гиперболический синус
• ch(x) — гиперболический косинус
• th(x) — гиперболический тангенс
• cth(x) — гиперболический котангенс
• sch(x) — гиперболический секанс
• csch(x) — гиперболический косеканс
• arsh(x) — обратный гиперболический синус
• arch(x) — обратный гиперболический косинус
• arth(x) — обратный гиперболический тангенс
• arcth(x) — обратный гиперболический котангенс
• arsch(x) — обратный гиперболический секанс
• arcsch(x) — обратный гиперболический косеканс
[spoiler title=”источники:”]
http://math.semestr.ru/line/curve.php
http://mathdf.com/dif/ru/
[/spoiler]
