Предыдущие лекции по теории автоматического управления можно посмотреть здесь:
1. Введение в теорию автоматического управления.2. Математическое описание систем автоматического управления 2.1 — 2.3, 2.3 — 2.8, 2.9 — 2.13.
3. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ЗВЕНЬЕВ И СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕГУЛИРОВАНИЯ. 3.1. Амплитудно-фазовая частотная характеристика: годограф, АФЧХ, ЛАХ, ФЧХ. 3.2. Типовые звенья систем автоматического управления регулирования. Классификация типовых звеньев. Простейшие типовые звенья. 3.3. Апериодическое звено 1–го порядка инерционное звено. На примере входной камеры ядерного реактора. 3.4. Апериодическое звено 2-го порядка. 3.5. Колебательное звено. 3.6. Инерционно-дифференцирующее звено. 3.7. Форсирующее звено. 3.8. Инерционно-интегрирующее звено (интегрирующее звено с замедлением). 3.9. Изодромное звено (изодром). 3.10 Минимально-фазовые и не минимально-фазовые звенья. 3.11 Математическая модель кинетики нейтронов в «точечном» реакторе «нулевой» мощности.
4. Структурные преобразования систем автоматического регулирования.
5. Передаточные функции и уравнения динамики замкнутых систем автоматического регулирования (САР).
6.1. Понятие об устойчивости САР. Теоремы Ляпунова.
В теории «Управления техническими системами» общепринято понятие качество управления, состоящее из трех основных составляющих:
-
устойчивость САР (или запасы устойчивости);
-
точность САР;
-
качество переходного процесса.
Необходимо заметить, что если не обеспечена устойчивость замкнутой САР, то говорить о точности и, тем более, о качестве переходного процесса – бессмысленно.
Поэтому понятие «устойчивость» – важнейшее понятие для САР.
Приведем «механическую» аналогию понятия «устойчивость»
 абсолютно устойчивое положение, б) неустойчивое положение, в) нейтральное (безразличное) положение.")
В положении а) при отклонении шарика от нижнего положения он обязательно вернется в свое устойчивое положение (низ «воронки»).
В положении б) малейшее отклонение шара от состояния равновесия приведет к «скатыванию» его вниз; т.е. шар не вернется сам назад на вершине «горки».
В положении в) при воздействии на шар он начнет перемещаться в горизонтальном направлении и, если нет трения, то шар будет двигаться с постоянной скоростью.
Если реальная замкнутая САР имеет свойства, аналогичные а), то она «хорошая», если б) – «совсем плохая». Нужно так проектировать САР, чтобы ее свойства были похожи на а), т.е. если какое-то возмущающее воздействие отклонит систему от равновесия, то система управления обязана вернуть техническую систему в состояние равновесия.
Ранее мы водили передаточную функуию для по возмущающему воздействию для замкнутой САР (см. формулу 5.4 в предыдущей лекции). Уравнения динамики замкнутой САР, описываемую в переменных «вход-выход»:
![]()
Решения для такого уравнения будет являтся суммой двух функций:![]() , где
, где ![]() – собственное решение, при
– собственное решение, при ![]() и вынужденное
и вынужденное ![]() решение вызванное воздействием.
решение вызванное воздействием.
Решим характеристическое уравнение (подробнее смотри здесь…)
![]()
![]()
Решая уравнение (6.1.2), которое является типичным степенным уравнением, каким-либо способом (в том числе и с помощью стандартных подпрограмм на компьютере) находим корни характеристического уравнения ![]() , тогда собственное решение примет вид:
, тогда собственное решение примет вид:

В зависимости от значения ![]() возможно несколько вариантов вида функуции. На рисунке 6.1.2 представлены варинаты поведения функции вида
возможно несколько вариантов вида функуции. На рисунке 6.1.2 представлены варинаты поведения функции вида ![]() в случае когда
в случае когда ![]() является реальными числом или комплексным числом
является реальными числом или комплексным числом ![]() .
.

Анализ вышеприведенных рисунков показывает, что система может вернуться в исходное состояние, если все составляющие ![]() при
при ![]() будут стремиться к нулю. А для этого показатель степени должен быть отрицательным. Поэтому условием устойчивости является отрицательное значение реальной части корней
будут стремиться к нулю. А для этого показатель степени должен быть отрицательным. Поэтому условием устойчивости является отрицательное значение реальной части корней ![]() т.е. необходимо чтобы корни характеристического уравнения лежали в левой полуплоскости.
т.е. необходимо чтобы корни характеристического уравнения лежали в левой полуплоскости.

Если корни комплексные, то процесс колебательный, если корни реальные, то процес аперодический (затухающий). Причем ось ординат соответствует границам устойчивости ![]() (апериодической или колебательной). Таким образом, вопрос об устойчивости или неустойчивости замкнутой (и разомкнутой) САР определяется по расположению корней соответствующего характеристического уравнения.
(апериодической или колебательной). Таким образом, вопрос об устойчивости или неустойчивости замкнутой (и разомкнутой) САР определяется по расположению корней соответствующего характеристического уравнения.
Для не замкнутой САР вместо ![]() устойчивость определяется корнями характеристического уравнения знаменателя передаточной функции
устойчивость определяется корнями характеристического уравнения знаменателя передаточной функции ![]() в предыдущей лекции мы выводили формулу рассчета передаточной фунции замкунутой САР, по предаточной функции разомкнутоф САР:
в предыдущей лекции мы выводили формулу рассчета передаточной фунции замкунутой САР, по предаточной функции разомкнутоф САР: ![]()
Таким образом, вопрос об устойчивости или неустойчивости замкнутой и разомкнутой САР определяется по расположению корней соответствующего характеристического уравнения.

Если все корни характеристического уравнения лежат (расположены) в левой полуплоскости – линейная (или линеаризованная) САР устойчива.
Необходимо заметить, что коэффициенты уравнения ![]() совпадают с коэффициентами многочлена (полинома)
совпадают с коэффициентами многочлена (полинома) ![]() следовательно полюса замкнутой САР тождественно совпадают с корнями характеристического уравнения
следовательно полюса замкнутой САР тождественно совпадают с корнями характеристического уравнения ![]() , где
, где ![]() – корни характеристического уравнения;
– корни характеристического уравнения; ![]() – полюса перредаточной функции.
– полюса перредаточной функции.
Напомним, полюсом передаточной функции называется значение её аргумента, при котором знаменатель функции обращается в ноль.
Используя приблизительно такие же рассуждения сходимости степенных функций Ляпуновым были сформулированы 3 теоремы об устойчивости линейных САР:
-
Если все корни характеристического уравнения или полюса передаточной функции САР расположены в левой полуплоскости, то линеаризованная САР обязательно вернется в исходное состояние при снятии внешнего воздействия, выведшего эту САР из состояния равновесия. Следовательно САР – устойчива.
-
Если хотя бы один полюс (или корень характеристического уравнения) передаточной функции САР расположен в правой полуплоскости (при всех остальных в левой полуплоскости), линейная (линеаризованная) САР никогда не вернется в исходное (равновесное) состояние при снятии внешнего воздействия, которое вывело данную САР из исходного состояния равновесия. Следовательно САР – неустойчива.
-
Если хотя бы один из полюсов передаточной функции САР (корней характеристического уравнения) находится на мнимой оси (при всех остальных в левой полуплоскости) об устойчивости линеаризованной САР ничего сказать нельзя, т.к. учет нелинейных (отброшенных) членов в динамике САР может дать любой результат (устойчива или неустойчива).
Резюмируя вышесказанное, отметим, что:
Наиболее простым способом определения устойчива или неустойчива САР (как замкнутая, так и разомкнутая) является решение уравнения ![]() для замкнутой САР (или
для замкнутой САР (или ![]() для разомкнутой САР) или решение характеристического уравнения
для разомкнутой САР) или решение характеристического уравнения ![]() или
или![]() – для разомкнутой САР).
– для разомкнутой САР).
Если САР задана в переменных состояния, то вопрос об устойчивости САР определяется матрицей А – собственной матрицей:

Если собственные числа матрицы А лежат в левой полуплоскости – САР устойчива; если хотя бы одно собственное число лежит в правой полуплоскости – линейная САР неустойчива.
Собственные числа (согласно разделу «Линейная алгебра») находятся из уравнения:
![]()
где: ![]() – матрица размера
– матрица размера ![]() ;
; ![]() – единичная матрица
– единичная матрица

Это означает, что уравнение принимает:

решая, находим ![]()
Фактически уравнения (6.1.6) и (6.1.7) – характеристические уравнения САР. Поэтому, если САР задана в переменных состояния, то характеристический полином ![]() при задании САР в переменных «вход-выход» может быть определен как:
при задании САР в переменных «вход-выход» может быть определен как:
![D(s)=left [ begin{align} det[A -E cdot s] = 0 - если размерность матрицы A четная \det[Ecdot s -A]=0 - если размерность матрицы A нечетная end{align} right.](https://habrastorage.org/getpro/habr/upload_files/cba/cf2/25f/cbacf225fc910e93dc60e4c1daff2cbe.svg)
Чисто математически задача определения устойчивости сводится к решению степенного уравнения ![]() или к проблеме нахождения собственных чисел матрицы А.
или к проблеме нахождения собственных чисел матрицы А.
6.2. Необходимые условия устойчивости линейных и линеаризованных САР.
Наиболее просто необходимое условие устойчивости линейных (линеаризованных) САР формулируется для систем, записанных в переменных «вход-выход», причем оно применяется в одинаковой «редакции» как для замкнутых, так и для разомкнутых САР. Это условие доказывается с использованием характеристического полинома D(s) – для замкнутых САР, или L(s) – для разомкнутых САР. Сделаем вывод на основании D(s)
Разложим многочлен D(s) на элементарные линейные сомножители :
![]()
![]()
где: ![]() – полюса передаточной функции замкнутой САР.
– полюса передаточной функции замкнутой САР.
Предположим, что ![]() и что все полюса
и что все полюса ![]() расположены в левой полуплоскости:
расположены в левой полуплоскости:

где: ![]() – действительный полюс;
– действительный полюс; ![]() – – комплексно-сопряженные полюса.
– – комплексно-сопряженные полюса.
Подставим значения ![]() в выражение 6.2.1 заметим, что если перемножать любые две скобки в выражении 6.2.1, которые содержат комплексно сопряженные скобки например
в выражение 6.2.1 заметим, что если перемножать любые две скобки в выражении 6.2.1, которые содержат комплексно сопряженные скобки например ![]() мы получим выражение типа:
мы получим выражение типа: ![]() .
.
В первой скобке мы получим выражение: ![]() Таким образом мы получаем только полжительные коэффициенты полинома
Таким образом мы получаем только полжительные коэффициенты полинома ![]() Таким образом можно сформулировать необходимое условие устойчивости линейных САР:
Таким образом можно сформулировать необходимое условие устойчивости линейных САР:
Необходимым условием устойчивости линейных САР является положительность всех коэффициентов в полиноме ![]() – для замкнутых САР, или в
– для замкнутых САР, или в ![]() – для разомкнутых САР.
– для разомкнутых САР.
Для систем 1-го и 2-го порядка необходимое условие является и достаточным.
Но для систем, имеющих порядок , выполнение необходимого условия невсегда является достаточным.
Тем не менее, необходимое условие «очень удобно», т.е. если хотя бы один коэффициент в D(s) отрицателен, то однозначно – САР неустойчива.
Если необходимое условие выполнено ![]() , то если порядок матрицы больше 2
, то если порядок матрицы больше 2 ![]() необходимо либо вычислить корни характеристического уравнения (полюса передаточной функции), либо используя какой-либо из критериев устойчивости сделать соответствующий вывод об устойчивости САР.
необходимо либо вычислить корни характеристического уравнения (полюса передаточной функции), либо используя какой-либо из критериев устойчивости сделать соответствующий вывод об устойчивости САР.
6.3. Алгебраический критерий устойчивости Гурвица.
Как отмечалось выше, устойчивость любой САР можно определить, вычислив значение всех полюсов (или корней соответствующего характеристического уравнения). Однако далеко не все способны без компьютера (калькулятора) решить степенное уравнение выше квадратного (кубическое и т.д.).
Критерий Гурвица, являющийся частным случаем критерия Раусса, позволяет не решая уравнений типа ![]() или
или ![]() сделать вывод об устойчивости САР на основании «несложных» вычислений с использованием коэффициентов характеристического полинома.
сделать вывод об устойчивости САР на основании «несложных» вычислений с использованием коэффициентов характеристического полинома.
Представим полином ![]() в измененном виде:
в измененном виде:
![]()
Данное выражение полинома позволяет соcтавить матрицу Гурвица, для этого:
-
по главной диагонале по главной диагонали слева направо выставляются коэффициенты характеристического уравнения от
 до
до  ;
; -
от каждого элемента диагонали вверх и вниз достраиваются столбцы определителя так, чтобы индексы убывали сверху вниз;
-
на место коэффициентов с индексами меньше нуля или больше
 ставатся нули:
ставатся нули:

Составив эту матрицу можно сфомулировать критерий:
Для того, чтобы замкнутая САР (или разомкнутая) была устойчивой, необходимо и достаточно, чтобы были положительны все n главных определителей Гурвицевой матрицы Г.

Если все определители больше нуля, то линейная САР устойчива.
Если все определители больше нуля и ![]() то САР находится на апереодической границе устойчивости.
то САР находится на апереодической границе устойчивости.
Если все определители, кроме ![]() больше нуля, а опеределитель
больше нуля, а опеределитель ![]() и
и ![]() Р , то САР находится на колебательного границы устойчивости.
Р , то САР находится на колебательного границы устойчивости.
Пример 1
Определить, устойчива или нет следующая система САР:

Найдем главную передаточную функцию замкнутой САР:
![Ф(s)=frac{W(s)}{W_{oc}(s)}=frac{10cdot s+1}{(4cdot s^2+s+1)cdot left [1+frac{10cdot s+1}{4cdot s^2+s+1}cdot frac{1}{s+1} right]}=\ =frac{(10cdot s+1)cdot(s+1)}{(s+1)cdot(4cdot s^2+s+1)+(10cdot s+1)}=frac{(10cdot s+1)cdot(s+1)}{underbrace{4cdot s^3+5cdot s^2+12cdot s+2}_{D(s)}}](https://habrastorage.org/getpro/habr/upload_files/c0e/fdd/cb4/c0efddcb49caaab7c6e49ee2dbf3dff4.svg)
Все коэффициенты полинома ![]() – положительные:
– положительные:

А значит САР может быть устойчива. Составим матрицу Гурвица, и найдем ее определители:

Все определители матрицы Гурвица больше нуля, следовательно САР устойчива.
Пример 2
Используя критерий Гурвица, выполнить анализ устойчивости следующей САР:

Общая передаточная функция разомкнутой системы САР:

Корни знаменателя передаточной функцийй размкнутой САР:
![]()
Поскольку ![]() разомкнутая САР находится на границе устойчивости.
разомкнутая САР находится на границе устойчивости.
Передаточная функция замкнутой САР:



Выражения для матрицы Гурвица:

Главные определители матрицы Гурвица:

Очевидно из формулы для определиттеля ![]() следует что для устойчивости САР необходимо чтобы
следует что для устойчивости САР необходимо чтобы ![]()

В случае когда постоянные времени положительны ![]() условие устойчивости можно вычислить получить из выражения для второго определителя:
условие устойчивости можно вычислить получить из выражения для второго определителя:
![]()

Полученный результат свидетельствует, что если ![]() , то для того, чтобы САР была устойчивой, необходимо, чтобы выполнит следующие условия:
, то для того, чтобы САР была устойчивой, необходимо, чтобы выполнит следующие условия:
![]()
Усложним задачу: предположим, что в системе САР изображенной на рис. 6.3.2 возможно варьировать (изменять) коэффициент усиления ![]() и постоянную времени, например,
и постоянную времени, например, ![]() В этом случае область устойчивости может быть отображена в виде фигуры в координатах
В этом случае область устойчивости может быть отображена в виде фигуры в координатах ![]()

Система неравенств такая же, что и выше, для определителей матрицы Гурвица:




Примеры из видео можно взять здесь..
Продолжение темы устойчивости:
6.4 Частотный критерий устойчивости Михайлова.
6.5. Частотный критерий Найквиста
6.6. Понятие об областях устойчивости
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 24 октября 2021 года; проверки требуют 6 правок.
Критерий устойчивости Гурвица — один из способов анализа линейной стационарной динамической системы на устойчивость, разработанный немецким математиком Адольфом Гурвицом. Наряду с критерием Рауса является представителем семейства алгебраических критериев устойчивости, в отличие от частотных критериев, таких, как критерий устойчивости Найквиста — Михайлова. Достоинством метода является принципиальная простота, недостатком — необходимость выполнения операции вычисления определителя, которая связана с определенными вычислительными тонкостями (например, для больших матриц может появиться значительная вычислительная ошибка).
Формулировка[править | править код]
Метод работает с коэффициентами характеристического уравнения системы. Пусть  — передаточная функция системы, а
— передаточная функция системы, а  — характеристическое уравнение системы. Представим характеристический полином
— характеристическое уравнение системы. Представим характеристический полином  в виде
в виде

где  — комплексный аргумент.
— комплексный аргумент.
Из коэффициентов характеристического уравнения строится определитель Гурвица  по алгоритму:
по алгоритму:
- по главной диагонали слева направо выставляются все коэффициенты характеристического уравнения от
 до ;
до ; - от каждого элемента диагонали вверх и вниз достраиваются столбцы определителя так, чтобы индексы убывали сверху вниз;
- на место коэффициентов с индексами меньше нуля или больше ставятся нули.



Размерность матрицы Гурвица определяется максимальной степенью при s в характеристическом уравнении (то есть n).
Или явно[1]

Тогда согласно критерию Гурвица:
Для того, чтобы динамическая система была устойчива, необходимо и достаточно, чтобы все

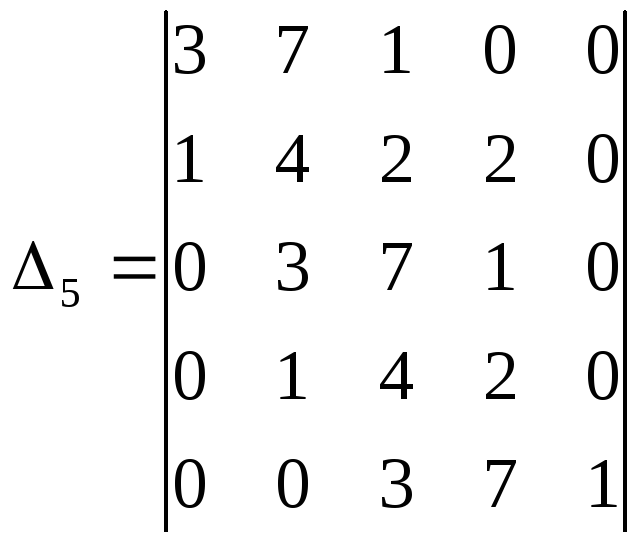
(Пример определителя Гурвица для характеристического уравнения пятой степени.)
Анализируя условие критерия Гурвица, можно заметить его избыточность. Число неравенств можно уменьшить в два раза, используя теорему Льенара — Шипара. Впрочем, в вычислительном отношении сложность критерия уменьшается не существенно, так как при вычислении минора высокого порядка чаще всего необходимо вычисление миноров низших порядков.
Достоинства и недостатки[править | править код]
Недостаток критерия Гурвица — малая наглядность. Достоинство — удобен для реализации на ЭВМ. Его часто используют для определения влияния одного из параметров САУ на ее устойчивость. Так равенство нулю главного определителя  говорит о том, что система находится на границе устойчивости. При этом либо
говорит о том, что система находится на границе устойчивости. При этом либо  — при выполнении остальных условий система находится на границе апериодической устойчивости, либо предпоследний минор
— при выполнении остальных условий система находится на границе апериодической устойчивости, либо предпоследний минор  — при положительности всех остальных миноров система находится на границе колебательной устойчивости. Параметры САУ определяют значения коэффициентов уравнения динамики, следовательно изменение любого параметра
— при положительности всех остальных миноров система находится на границе колебательной устойчивости. Параметры САУ определяют значения коэффициентов уравнения динамики, следовательно изменение любого параметра  влияет на значение определителя
влияет на значение определителя  . Исследуя это влияние можно найти, при каком значении определитель станет равен нулю, а потом — отрицательным. Это и будет предельное значение исследуемого параметра, после которого система становится неустойчивой.
. Исследуя это влияние можно найти, при каком значении определитель станет равен нулю, а потом — отрицательным. Это и будет предельное значение исследуемого параметра, после которого система становится неустойчивой.
К вопросу об автоматизации метода[править | править код]
Метод Гурвица достаточно удобен для определения устойчивости звеньев при помощи ЭВМ. При этом, однако, следует учитывать, что применение критерия для систем с порядком выше 5 может привести к значительным ошибкам, поскольку вычисление определителей высоких порядков является достаточно сложной операцией и приводит к накоплению ошибок вычислений.
Ниже приведён пример автоматизации работы метода с использованием одного из самых распространённых языков для технических вычислений MATLAB версии 5.3 с его синтаксисом.
Представленная ниже функция выполняет все необходимые вычисления. Для работы её необходимо поместить в текстовый файл с расширением .m и именем, совпадающим с именем самой функции, в данном случае имя файла должно быть raus_gur.m.
function [Ust, Mnrs, Mtrx] = raus_gur(D) % Определение устойчивости системы методом Рауса-Гурвица, заданной при % помощи следующей передаточной функции. % % B(s) % W(s) = ----, % D(s) % % Здесь D(s) - характеристический полином. % % D(s) = a0*s^n + a1*s^(n-1) + a2*s^(n-2) + ... + an % % a0, a1, a2, ..., an - коэффициенты полинома D. % % % Обращение к функции RAUS_GUR может быть выполнено двумя способами: % % Способ 1. % % [Ust, Mnrs, Mtrx] = raus_gur(D); % % Входные параметры: % D - вектор коэффициентов знаменателя (характеристический полином) % % Выходные параметры: % Ust - строковое значение, сообщающее устойчива система или неустойчива % % Mnrs - вектор значений миноров от меньшего размера к большему, % которые необходимо вычислить для оценки устойчивости по методу Рауса-Гурвица. % Согласно методу Рауса-Гурвица, система устойчива, если все миноры положительны. % Вычисления значения внешнего минора не имеют смысла, так как его знак % всегда будет совпадать со знаком предыдущего минора. % % Mtrx - полная матрица Рауса-Гурвица для данного полинома. % % Способ 2. % % [Ust, Mnrs, Mtrx] = raus_gur(W); % % Входные параметры: % W - объект класса LTI (см. описание Control System Toolbox) % % Выходные параметры аналогичны вышеописанным. % % % Ориентирована на работу в версии MATLAB 2022a if isa(D,'tf') [~,D]=tfdata(D,'v'); end n=length(D)-2; Dr=[D zeros(1,n)]; A=flipud(reshape(Dr,2,[])); Mtrx=cell2mat(arrayfun(@(x)(circshift(A',x))',(0:n/2)',"UniformOutput",false)); Mnrs=cell2mat(arrayfun(@(x)det(Mtrx(1:x,1:x)),(2:n)',"UniformOutput",false)); Z=''; if any(Mnrs<0) Z='не '; end Ust=['система ',Z,'устойчива']; end
Пример[править | править код]
Пусть дана передаточная функция:

Тогда вызов приведенной выше функции будет выглядеть следующим образом:
format shortG
[A, B, C] = raus_gur([1 16 95 260 324 144])
А результат вычислений:
A =
‘система устойчива’
B =
1260
2.4696e+05
6.3504e+07
C =
16 260 144 0 0
1 95 324 0 0
0 16 260 144 0
0 1 95 324 0
0 0 16 260 144
0 0 1 95 324
A сообщает, что система устойчива.
Вектор В содержит значения диагональных определителей от 2×2 до 4×4, первый элемент не имеет значения, а значение внешнего определителя всегда будет иметь тот же знак, что и предыдущий. Согласно методу Гурвица, чтобы система была устойчива, все эти определители должны оказаться положительными.
Матрица С — сам определитель Гурвица.
Эту функцию вполне можно использовать в математических пакетах, имеющих схожий с MATLAB синтаксис или после небольшой переделки.
Система находится на границе апериодической устойчивости, если  .
.
Система находится на границе колебательной устойчивости, если определитель Гурвица с индексом (n-1) будет равным 0.
См. также[править | править код]
- Критерий устойчивости Рауса
- Критерий устойчивости Найквиста — Михайлова
- Теорема Рауса — Гурвица
- Маркеры устойчивости линейных динамических систем
Примечания[править | править код]
- ↑ Гантмахер Ф. Р. Теория матриц. — 5-е изд. — М.: Физматлит, 2010. — С. 463. — 560 с. — ISBN 978-5-9221-0524-8.
Литература[править | править код]
Четаев Н. Г. Устойчивость движения. — М: Наука, 1965. — 234 с.
Ссылки[править | править код]
Определение устойчивости по критерию Гурвица
Для
устойчивости системы необходимо и
достаточно, чтобы все миноры определителя
Гурвица были положительны.
По
коэффициентам характеристического
уравнения составляется определитель
Гурвица.
![]()
Для
этого по главной диагонали делителя
выписываются все коэффициенты
характеристического уравнения, начиная
со второго (т.е. а1,
а2,
а3,
… ,аn
), затем вверх записываются коэффициенты
с возрастающим индексом, а вниз – с
убывающим индексом.
Например,
для третьего коэффициента в главной
диагонали а3
вверх
записываются а4,
а5
(индекс возрастает), а вниз – а2,
а1,
а0.
На остальные оставшиеся места вписываются
нули.
Д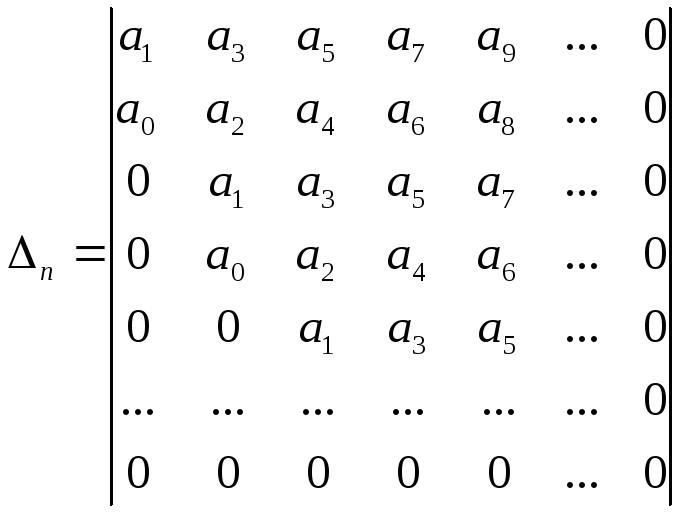 ля
ля
проверки правильности заполнения
определителя Гурвица необходимо
учесть, что по строкам чередуются
коэффициенты с нечётными и чётными
индексами. Так первая строка – нечётные
а1
а3
а5
а7…,
вторая строка – четные а0а2
а4
а6
и т.д.
Покажем
вычисление миноров в определителе
Гурвица для системы 6-го порядка. 




![]()
Последний
определитель обычно не рассчитывается.
В данном случае
![]() .
.
Если выполняется первое необходимое
условие устойчивости (все а>0), то при![]() >0
>0![]() всегда
всегда
положителен.
Пусть
необходимо определить устойчивость
системы пятого порядка. Тогда а6=0
![]() >0
>0
неравенства принимают вид:
![]()
![]()
![]()
![]()
Если
необходимо определить устойчивость
системы четвертого порядка, то
![]()
![]() неравенства принимают вид:
неравенства принимают вид:
![]()
![]()
![]()
Для
устойчивости системы третьего порядка
достаточно
![]() .
.
Для
систем седьмого порядка определение
устойчивости по Гурвицу обычно не делают
из-за громоздкости расчетов.
ПРИМЕР
1. Определить устойчивость САУ по критерию
Гурвица по следующему характеристическому
уравнению:
![]() .
.
Решение.
1. Все коэффициенты характеристического
уравнения положительные. Значит
необходимое условие устойчивости
выполняется.
2.
Составляется определитель Гурвица
Определяют
значения миноров согласно неравенствам:

![]()
Ответ.
Все миноры определителя Гурвица
положительны, значит вещественная часть
корней характеристического уравнения
отрицательна и, согласно теореме
Ляпунова, САУ устойчива.
Критерий устойчивости Рауса
Для
устойчивости систем необходимо и
достаточно, чтобы все коэффициенты
первого столбца таблицы Рауса были
положительны.
Таблица
Рауса составляется по правилам:
а)
в первой строке таблицы Рауса записываются
соответственно коэффициенты а0,а2,а4
….;
б)
во второй строке таблицы Рауса записываются
соответственно коэффициенты а1,а3,а5
….;
в)
коэффициенты третьей строки таблицы
Рауса вычисляются по формулам:

г)
коэффициенты четвертой строки таблицы
Рауса определяются по формулам:
![]()

д)
коэффициенты n-й
строки таблицы Рауса вычисляются по
формулам
![]()
где
i
– номер столбца; j
– номер строки.
ПРИМЕР
2. Определить устойчивость САУ по критерию
Рауса по характеристическому уравнению
примера 1.
![]()
Решение.
1. Вычисляют третью строку таблицы Рауса:

2.
Определяют четвертую строку:

3.
Вычисляют пятую строку:

4.
Определяют шестую строку:
![]()
По
результатам расчета составляют таблицу
Рауса.
Таблица
1
Таблица
Рауса
-
№ строки
R
1
столбец2
столбец3
столбец1
2


3
4
5
6









Ответ:
коэффициенты первого столбца положительны.
Система устойчивая.
Критерии устойчивости Рауса–Гурвица и Михайлова
(геометрический критерий устойчивости)
Пусть имеем линейное дифференциальное уравнение с постоянными вещественными коэффициентами:
(1)
Нулевое решение уравнения (1) асимптотически устойчиво, если все корни характеристического уравнения
(2)
имеют отрицательные вещественные части.
Критерий Рауса—Гурвица. Для того чтобы все корни уравнения (2) имели отрицательные вещественные части, необходимо и достаточно, чтобы были положительными все главные диагональные миноры матрицы Гурвица
(3)
Матрица Гурвица составляется так. По главной диагонали выписываются коэффициенты многочлена (2), начиная с и оканчивая
. Столбцы состоят поочередно из коэффициентов только с нечетными или только с четными индексами, причем в число последних включается коэффициент
. Все остальные элементы матрицы, отвечающие коэффициентам с индексами, большими
или меньшими
, полагаются равными нулю. Главные диагональные миноры матрицы Гурвица имеют вид
Таким образом, условие Гурвица гласит: для устойчивости решения уравнения (1) необходимо и достаточно, чтобы выполнялись соотношения
(4)
Так как , то условие
может быть заменено требованием
.
Пример 1. Исследовать на устойчивость нулевое решение уравнения
(11)
Решение. Составляем характеристическое уравнение
Здесь . Выписываем диагональные миноры Гурвица
Итак, . Следовательно, тривиальное решение
уравнения (5) асимптотически устойчиво.
Вычисление можно, например, организовать так. Составляем сначала старший минор Гурвица . По нему легко выписываются все младшие миноры
. Затем начинаем вычислять последовательно
и т.д. Если встретился отрицательный минор, решение неустойчиво и дальнейший подсчет не нужен.
Геометрический критерий устойчивости (критерий Михайлова)
Рассмотрим линейное дифференциальное уравнение n-го порядка с постоянными вещественными коэффициентами
(1)
Его характеристическое уравнение
(2)
Критерий Михайлова позволяет решить вопрос о расположении корней характеристического уравнения (2) на комплексной плоскости и, следовательно, решить вопрос об устойчивости нулевого решения уравнения (1). Полагая , получаем
где
Величину при заданном значении параметра
можно изобразить в виде вектора на комплексной плоскости
с началом в начале координат.
При изменении в интервале
конец этого вектора опишет некоторую кривую — так называемую кривую Михайлова (рис. 45). Так как функция
четная, то кривая Михайлова симметрична относительно оси
и поэтому достаточно строить часть кривой, отвечающую изменению параметра
от
до
.
Если многочлен степени
имеет
корней с положительной вещественной частью и
корней с отрицательной, то угол
поворота вектора
при изменении
от
до
равен
.
Ясно, что для устойчивости решения уравнения (1) необходимо и достаточно, чтобы .
Критерий Михайлова. Для устойчивости нулевого решения уравнения (1) необходимо и достаточно, чтобы
1) вектор при изменении
от
до
совершил поворот на угол
, т.е. сделал
оборотов против часовой стрелки;
2) годограф при изменении
от
до
не проходил через начало
.
Отсюда следует, что для устойчивости решения уравнения (1) необходимо, чтобы все корни уравнений
были вещественными и перемежающимися друг с другом, т.е. между любыми двумя корнями одного уравнения должен находиться корень другого уравнения.
Пример 1. Исследовать на устойчивость нулевое решение уравнения
Решение. Составляем характеристический многочлен
Далее,
Построим кривую (рис.46)
Угол поворота радиуса-вектора . Отсюда
и так как
, то
, т.е. все корни характеристического уравнения лежат в левой полуплоскости. Значит, тривиальное решение
асимптотически устойчиво.
Математический форум (помощь с решением задач, обсуждение вопросов по математике).
Если заметили ошибку, опечатку или есть предложения, напишите в комментариях.

Демьян Бондарь
Эксперт по предмету «Автоматизация технологических процессов»
преподавательский стаж — 5 лет
Задать вопрос автору статьи
Формулировка, преимущества и недостатки критерия Гурвица
Определение 1
Критерий Гурвица – это способ анализа стационарной динамической системы на устойчивость, который был разработан немецким ученым Адольфом Гурвицем.
Наряду с критерием Рауса, критерий Гурвица представляет семейство алгебраических критериев устойчивости системы. Его главное достоинство – принципиальная простота, а главный недостаток заключается в том, что существует необходимость выполнения операции вычисления определителя, связанной с многочисленными вычислительными тонкостями. Данный метод определения устойчивости связан с коэффициентами характеристического уравнения. Предположим, что:
$W(s) = Y(s)/U(s) $- передаточная функция.
![]()
Сдай на права пока
учишься в ВУЗе
Вся теория в удобном приложении. Выбери инструктора и начни заниматься!
Получить скидку 3 000 ₽
U(s) – характеристическое уравнение рассматриваемой системы.
Теперь представим характеристический полином U(s) в следующем виде:

Рисунок 1.
где, s – комплексный аргумент.
Затем строится определитель Гурвица из коэффициентов характеристического уравнения системы по следующему алгоритму:
- По правой диагонали слева направо выставляются все коэффициенты характеристического уравнения системы.
- От каждого элемента диагонали вверх и вниз достраиваются столбцы определителя таким образом, чтобы индексы убывали сверху вниз.
- На место коэффициентов, у которых индекс меньше нуля или больше n, ставятся нули.
Размерность таблицы Гурвица определяется максимальной степенью s в характеристическом уравнении.

Рисунок 2.
« Устойчивость систем: критерий Гурвица» 👇
Тогда, в соответствии с критерием Гурвица для того, чтобы динамическая система была устойчива, необходимо, чтобы все n главных диагональных миноров определителя Гурвица были положительными, при условии, что a0 > 0. Если проанализировать условия критерия Гурвица, то заметна его избыточность. Количество неравенств может быть уменьшено в два раза, для чего используется теорема Льенара-Шипара.
Еще один недостаток критерия Гурвица – его малая наглядность. А достоинство заключается в том, что он удобен для реализации на электронно-вычислительной машине. Он часто используется для определения влияния одного из параметров системы автоматического управления на уровень ее устойчивости. Например, равенство главного определителя нулю говорит о том, что система находится на границе устойчивости. Параметры автоматической системы управления определяют значения коэффициентов динамического уравнения, таким образом изменение любого параметра системы влияет на значение определителя.
Решение задачи при помощи критерия Гурвица
Допустим задана автоматическая система управления, структурная схема которой изображена на рисунке ниже.

Рисунок 3. Схема автоматической системы управления. Автор24 — интернет-биржа студенческих работ
Сначала необходимо получить для нее передаточные функции и определить соотношение параметров, которые обеспечивают ее устойчивость. По задающему воздействию передаточная функция разомкнутой системы будет иметь следующий вид:

Рисунок 4.
По возмущающему воздействию передаточная функция разомкнутой системы будет выглядеть следующим образом:

Рисунок 5.
Передаточная функция разомкнутой цепи выглядит следующим образом:

Рисунок 6.
Допустим:
$К = К1К2Кос$ – коэффициент передачи разомкнутой цепи.
Тогда:

Рисунок 7.
По задающему воздействию передаточная функция замкнутой системы выглядит следующим образом:

Рисунок 8.
По возмущающему воздействию передаточная функция замкнутой системы имеет следующий вид:

Рисунок 9.
Характеристический полином автоматической системы управления, то есть знаменатель любой из передаточных функций замкнутой системы, выглядит следующим образом:

Рисунок 10.
Где:
- $а0=1+Кр$
- $а1 = Т1+Т2+Тос$
- $а2 = Т1(Т2+Тос)+Т2Тос$
- $а3 = Т1Т2Тос$
Видно, что характеристический полином замкнутой системы автоматического управления равняется сумме числителя и знаменателя передаточной функции разомкнутой цепи. Так как все коэффициенты характеристического полинома больше нуля, то в соответствии с условием устойчивости все сводится к следующему неравенству:

Рисунок 11.
Полученное неравенство показывает, что устойчивость системы автоматического управления в конце нарушится в случае неограниченного увеличения коэффициента передачи при любых положительных значениях постоянных времени. Предельная величина значения коэффициента передачи, при котором автоматическая система управления теряет устойчивость называется граничным, а для рассматриваемого примера рассчитывается следующим образом:

Рисунок 12.
Находи статьи и создавай свой список литературы по ГОСТу
Поиск по теме
