-
Составление и преобразования структурных схем сау
-
Составление структурных схем
-
Под структурной
схемой понимают графическое изображение
САУ, которое определяет основные
функциональные части системы, их
назначение и взаимосвязи и отображает
систему дифференциальных уравнений,
описывающих процессы в элементах
системы. Структурные схемы состоят из
отдельных структурных элементов в виде
прямоугольников, соединённых линиями
связи, дающих представление о взаимосвязи
устройств, функциональных частей и
отдельных элементов САУ. На линиях связи
стрелками обозначается направление
хода процессов. При использовании
структурных схем для анализа и синтеза
САУ внутри прямоугольников, изображающих
динамические звенья, записываются
передаточные функции этих звеньев. В
нелинейных системах внутри прямоугольников
изображаются нелинейные характеристики
функциональных звеньев или их временные
характеристики. При составлении
структурных схем полагают, что звенья
являются однонаправленными, т.е.
представляют собой детектирующие
динамические устройства. Практически
в подавляющем большинстве случаев
структурные схемы САУ представляют
различные комбинации относительно
небольшого числа типовых динамических
звеньев направленного действия.
Обозначения
структурных элементов приведены в
таблице 1.
Таблица
1 – Основные обозначения в структурных
схемах
|
№ n/n |
Наименование |
№ n/n |
Наименование |
|
|
1 |
Элемент |
6 |
Блок |
|
|
2 |
Элемент |
7 |
Блок |
|
|
3 |
Сумматор |
8 |
Линия |
|
|
4 |
Блок
|
9 |
Нелинейные
|
|
|
5 |
Блок
|
10 |
Функция
|










При составлении
структурных схем должны выполняться
следующие основные правила:
-
структурная схема
должна иметь входные и выходные внешние
воздействия (внешние связи), задаваемые
из физических соображений; -
каждое входное
воздействие (входной сигнал), являющееся
независимой функции времени, должно
иметь только вход в систему; -
входной сигнал
может замыкаться внутри структурной
схемы и иметь в виде ответвления
(замкнуться по выходной координате
системы) или не замыкаться внутри
структурной схемы (система, разомкнуться
по выходному сигналу); -
все внутренние
связи, определяемые системой управления,
должны иметь вход и выход.
Составление
структурной схемы САУ по заданной
системе дифференциальных уравнений
целесообразно проводить в следующей
последовательности:
-
система
дифференциальных уравнений записывается
в операторной форме; -
для каждого
уравнения системы условно выбирается
входная и выходная координаты; -
каждое уравнение
решается относительно выходной
координаты или члена, содержащего её
старшую производную; -
строятся графические
модели каждого из дифференциальных
уравнений; -
строиться общая
структурная схема САУ как совокупность
графических отображений каждого
дифференциального уравнения.
Следует отметить,
что задача составления структурных
схем может решаться неоднозначно, т.е.
можно получить несколько вариантов
графического изображения, но после
соответствующих преобразований все
изображения оказываются эквивалентны.
Кроме того,
структурная схема рассматривается как
схема прохождения и преобразования
сигналов в САУ. Поэтому отдельные звенья
структурной схемы не обязательно
соответствуют определённым конструктивным
элементам системы, т.е. отдельный
конструктивный элемент может быть
представлен несколькими типовыми
звеньями, но иногда несколько элементов
системы объединяются в одно типовое
звено.
Пример 3.1.
На рисунке 12 приведена автоматическая
система стабилизации скорости вращения
двигателя постоянного тока независимого
возбуждения:

Рисунок 10.
Автоматическая система стабилизации
скорости вращения двигателя постоянного
тока независимого возбуждения
Элементы схемы:
ОУ1
– задающая обмотка управления ЭМУ;
ОУ2
– управляющая обмотка ЭМУ;
Г – генератор;
ЭМУ – электромашинный
усилитель поперечного поля;
Д – двигатель;
ТГ – тахогенератор;
U0
– задающее напряжение;
Uэ
– напряжение сравнения;
ЭУ – электронный
усилитель.
Составим структурную
схему системы стабилизации, считая:

Решение: для
двигателя уравнение равновесия моментов
(2 закон Ньютона):
 ,
,
(60)
где
 –
–
электромагнитный
момент двигателя;
 –момент нагрузки;
–момент нагрузки;
 –момент инерции
–момент инерции
двигателя;
 –магнитный поток
–магнитный поток
двигателя;
 –конструктивный
–конструктивный
коэффициент двигателя.
Уравнение равновесия
напряжений для якорной цепи двигателя:
 ,
,
(61)
где
 – против ЭДС двигателя;
– против ЭДС двигателя;
Rя,
Lя
– сопротивление и индуктивность якорной
цепи;
 –ЭДС генератора;
–ЭДС генератора;
Сг,
Фг,
г
– конструктивный коэффициент, магнитный
поток и скорость вращения генератора.
 – коэффициент
– коэффициент
передачи генератора.
Генератор. Для
цепи возбуждения генератора:
 ,
,
(62)
где
 ,
,

– сопротивление
и индуктивность обмотки возбуждения
генератора;
Uв,
Iв
– напряжение и ток возбуждения генератора.
ЭМУ. Если нагрузкой
ЭМУ является цепь возбуждения генератора,
то дифференциальное уравнение имеет
вид:
 ,
,
(63)
где Ту,
Ткз
– постоянные времени цепи управления
и К.З. цепи;
Ку
– коэффициент передачи ЭМУ по напряжению.
Электронный
усилитель. Уравнение усилителя (Тэу=0):
 ,
,
(64)
где Кэу
– коэффициент усиления электронного
усилителя.
Тахогенератор.
Уравнение ЭДС якоря тахогенератора:
 ,
,
(65)
где КТГ
– коэффициент передачи тахогенератора.
Уравнение (60)
– (65)
определяют динамический режим работы
системы после появления внешнего
воздействия.
Запишем уравнение
(60)
– (65)
в операторной форме:
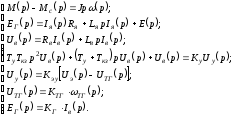 (66)
(66)
Преобразуем систему
(66,
принимая во внимание: М=КФIя,
Мс=КФIс,
Е=КФ:
 (67)
(67)
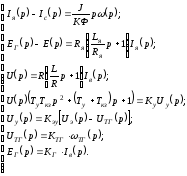
Обозначив:
 ,
, ;
; ,
,
где
 ,
,
получим:
 (68)
(68)
Используя полученную
систему уравнений, составим структурную
схему представленную на рисунке 11.

Рисунок
11. Структурная схема системы стабилизации
Соседние файлы в папке ТАУ
- #
- #
- #
|
|

Макеты страниц
Структурные схемы систем автоматического регулирования в наглядной форме отражают состав систем и связи между их элементами. С помощью структурных схем удается уточнить внутреннее строение системы и найти место включения дополнительных связей, улучшающих качество динамических процессов, происходящих в системе.
Пользуясь представлением устройств и объектов регулирования в виде передаточных функций, можно получить структурные схемы, удобные для расчетов систем автоматического регулирования методами анализа (часть II) и синтеза (часть III). Структурные схемы систем состоят из отдельных структурных элементов, обозначения которых приведены в табл. IX.4.
Рассмотрим способы составления структурных схем для устройств и объектов регулирования. По уравнениям сравнения (IX.6) и передаточным функциям (IX.7) составим структурную схему электромашинного усилителя с поперечным полем возбуждения. Сигналы  управления ЭМУ поступают на первый элемент сравнения 1, на выходе которого получается сигнал
управления ЭМУ поступают на первый элемент сравнения 1, на выходе которого получается сигнал  (рис. IX.1). Сигнал
(рис. IX.1). Сигнал  подается на звено с передаточной функцией
подается на звено с передаточной функцией  [см. первое уравнение (IX.7)]. Далее выходной сигнал
[см. первое уравнение (IX.7)]. Далее выходной сигнал  поступает в звено с передаточной функцией
поступает в звено с передаточной функцией  Образующийся на выходе сигнал
Образующийся на выходе сигнал  подается на второй элемент сравнения 2. Сюда же поступает сигнал Сигнал
подается на второй элемент сравнения 2. Сюда же поступает сигнал Сигнал  на выходе этого элемента сравнения поступает на звено с передаточной функцией
на выходе этого элемента сравнения поступает на звено с передаточной функцией  Выходной сигнал
Выходной сигнал  этого звена подается в звено с передаточной функцией
этого звена подается в звено с передаточной функцией  Образующийся на его выходе сигнал на поступает в звено с передаточной функцией
Образующийся на его выходе сигнал на поступает в звено с передаточной функцией  где образуется выходной сигнал систем
где образуется выходной сигнал систем  Сигнал
Сигнал  проходя через звенья с передаточными функциями
проходя через звенья с передаточными функциями  образует напряжение
образует напряжение  поступающее на элемент сравнения 2, и напряжение
поступающее на элемент сравнения 2, и напряжение  поступающее на элемент сравнения 1. В результате получается структурная схема ЭМУ, образованная двумя контурами (I и II).
поступающее на элемент сравнения 1. В результате получается структурная схема ЭМУ, образованная двумя контурами (I и II).
На основании рис. IX.1 можно установить, что элементы с передаточными функциями  пропускают входной сигнал в одном направлении и являются детектирующими динамическими, а элементы с передаточными функциями
пропускают входной сигнал в одном направлении и являются детектирующими динамическими, а элементы с передаточными функциями  нарушают условие детектирования, так как они пропускают сигнал в обратном направлении; поэтому эти элементы являются недетектирующими.
нарушают условие детектирования, так как они пропускают сигнал в обратном направлении; поэтому эти элементы являются недетектирующими.
Таблица IX.4 (см. скан) Основные обозначения в структурных схемах

Рис. IX.1. Структурная схема электромашинного усилителя с поперечным полем возбуждения, нагруженного омической нагрузкой
Составим структурную схему самолета как объекта регулирования, пользуясь дифференциальными уравнениями (IX. 13). Структурная схема приведена на рис. IX.2, а. Если воспользоваться передаточной функцией (IX.156), то структурная схема самолета существенно упростится и примет вид, изображенный на рис. IX.2, б.
По передаточной функции (IX.15в) можно получить структурную схему самолета в виде, изображенном на рис. IX.2, в.
Определенный интерес представляет структурная схема ядерного энергетического реактора на тепловых нейтронах. Уравнения динамики ядерного реактора запишем в обычной форме (см. гл. III):

Применим к этим линейным дифференциальным уравнениям преобразование Лапласа; тогда


Рис. IX.2. Структурные схемы самолета как объекта регулирования, составленные: а — по уравнениям динамики; б, в — по передаточным функциям

Рис. IX.3. Структурная схема ядерного энергетического реактора на тепловых нейтронах
Из этих уравнений, исключив переменную  можно найти передаточную функцию реактора в виде
можно найти передаточную функцию реактора в виде

или

где

По передаточной функции (IX.48) на рис. IX.3 построена структурная схема ядерного энергетического реактора. Особенность структурной схемы в том, что в цепи обратной связи имеется шесть параллельно соединенных звеньев с передаточными функциями, каждая из которых соответствует одной из шести групп запаздывающих нейтронов.
Рассмотрим систему автоматического регулирования скорости вращения гидротурбины при малой длине водяного канала (см. п. 2 гл. II). На рис. II.6 приведена блок-схема системы управления скоростью вращения гидротурбины. Составим уравнения динамики для некоторых устройств гидротурбины и объекта ее регулирования.
Для тахометрического измерения угловой скорости (см. п. 5 гл. IV) имеем

где  — относительные угловые скорости вращения центробежного регулятора;
— относительные угловые скорости вращения центробежного регулятора;  — перемещение рычага центробежного регулятора;
— перемещение рычага центробежного регулятора;  — постоянная времени центробежного регулятора; — коэффициент демпфирования центробежного регулятора; — коэффициент усиления центробежного регулятора.
— постоянная времени центробежного регулятора; — коэффициент демпфирования центробежного регулятора; — коэффициент усиления центробежного регулятора.
Из рис. II.5 видно, что перемещение  золотника вспомогательного сервомотора представляет собой разность между перемещением рычага центробежного регулятора и штока изодрома:
золотника вспомогательного сервомотора представляет собой разность между перемещением рычага центробежного регулятора и штока изодрома:

где С — перемещение штока изодрома.
Для вспомогательного гидравлического сервомотора уравнение динамики имеет вид

где  — перемещение плунжера золотника главного сервомотора;
— перемещение плунжера золотника главного сервомотора;  — постоянная времени вспомогательного сервомотора;
— постоянная времени вспомогательного сервомотора;  — коэффициент усиления вспомогательного сервомотора.
— коэффициент усиления вспомогательного сервомотора.
Для главного гидравлического серводвигателя уравнение динамики имеет вид

где  — перемещение штока главного серводвигателя, управляющего направляющим аппаратом гидротурбины;
— перемещение штока главного серводвигателя, управляющего направляющим аппаратом гидротурбины;  — постоянная времени главного сервомотора;
— постоянная времени главного сервомотора;  — коэффициент усиления главного сервомотора.
— коэффициент усиления главного сервомотора.
Для гидравлической турбины уравнение динамики было приведено в гл. III [формула (III.48)] в виде

где  — относительная величина открытия направляющего аппарата турбины;
— относительная величина открытия направляющего аппарата турбины;  — постоянная времени гидротурбины;
— постоянная времени гидротурбины;  — изменение нагрузки на гидротурбине.
— изменение нагрузки на гидротурбине.
Для изодромного устройства (см. гл. VIII) имеем

где  — постоянная изодрома;
— постоянная изодрома;  — коэффициент усиления изодрома.
— коэффициент усиления изодрома.
Если считать, что на входе тахометрического измерителя происходит сравнение скоростей вращения гидротурбины и электродвигателя центробежного регулятора (см. рис. II.5), то

Применив к уравнениям  прямое преобразование Лапласа, определим по ним передаточные функции
прямое преобразование Лапласа, определим по ним передаточные функции

и уравнения для элементов сравнения

Пользуясь блок-схемой системы (см. рис. II.6), передаточными функциями (IX.55) и уравнениями (IX.56) и (IX.57), нетрудно составить структурную схему системы автоматического регулирования скорости вращения гидротурбины. Такая структурная схема изображена на рис. IX.4. Она со-состоит из двух контуров: внутреннего и внешнего.

Рис. IX.4. Структурная схема системы автоматического регулирования скоростью вращения гидротурбины при короткой длине водяного канала
Составим структурную схему системы автоматического регулирования гидротурбины при большой длине водяного канала. Для этого воспользуемся дифференциальным уравнением (II 1.39), но будем считать, что в канале имеется неустановившееся движение скорости воды:

где  — установившееся значение скорости движения воды.
— установившееся значение скорости движения воды.
В этом случае линеаризация уравнения (II 1.39) даст

или

Так как

и

то уравнение (IX.60) будет

Подставим уравнение (IX.62) в исходное уравнение (III.24) и с учетом соотношения (111.43) получим

Для установившегося состояния имеем

Тогда уравнение (IX.63) примет вид

Введем в уравнение (IX.65) следующие обозначения:

после чего получим


Рис. IX.5. Структурная схема системы автоматического регулирования гидротурбины при большой длине водяного канала
Применив к полученному выражению преобразование Лапласа, при нулевых начальных условиях найдем

Подставив в уравнение (IX.67) значение  из выражения (IX.45) получим
из выражения (IX.45) получим

При  из уравнения (IX.68) получим передаточную функцию гидротурбины с учетом длинного водяного канала в виде
из уравнения (IX.68) получим передаточную функцию гидротурбины с учетом длинного водяного канала в виде

где выражение в квадратных скобках представляет собой передаточную функцию длинного водяного канала, т. е.

Подставим в выражение (IX.69)

тогда получим

С помощью выражений (IX.56), (IX.57) и заменяя  на
на  [см. (IX.69)], можно составить структурную схему системы автоматического регулирования скорости вращения гидротурбины. Структурная схема, приведенная на рис. IX.5, также является двухконтурной.
[см. (IX.69)], можно составить структурную схему системы автоматического регулирования скорости вращения гидротурбины. Структурная схема, приведенная на рис. IX.5, также является двухконтурной.
Рассмотрим систему автоматической стабилизации самолета по углу тангажа. Блок-схема этой системы приведена на рис. 11.16.
Составим передаточные функции самолета и отдельных устройств системы стабилизации.
Для потенциометрического устройства датчика угла тангажа

где  — коэффициент передачи потенциометрического устройства; для электронного усилителя
— коэффициент передачи потенциометрического устройства; для электронного усилителя

где  коэффициент усиления электронного усилителя;
коэффициент усиления электронного усилителя;
для рулевсй машинки

где  постоянная времени рулевой машинки;
постоянная времени рулевой машинки;  — коэффициент усиления рулевой машинки.
— коэффициент усиления рулевой машинки.
Для самолета передаточная функция была выведена ранее [см. выражение (IX. 15а)].
Рулевая машинка и электронный усилитель охвачены жесткой обратной связью с передаточным коэффициентом  т. е.
т. е.

В систему стабилизации входят также два прибора: дифференцирующий и свободный гироскопы. Передаточную функцию дифференцирующего гироскопа по аналогии с формулой (VIII. 17) запишем в виде

где  — передаточный коэффициент дифференцирующего гироскопа.
— передаточный коэффициент дифференцирующего гироскопа.
Ко входу электронного усилителя (см. рис. II. 16) поступают сигналы  и результирующий сигнал будет
и результирующий сигнал будет

или в операторной форме

Сигнал ошибки образуется как разность двух сигналов: заданного угла тангажа  и отработанного самолетом
и отработанного самолетом 

По передаточным функциям (IX. 15а), (IX.72)-(IX.76) и уравнениям сравнения (IX.78), (IX.79) составим структурную схему системы автоматической стабилизации самолета по углу тангажа (рис. IX.6). Как видно, данная схема является трехконтурной.
Перейдем к рассмотрению системы автоматического регулирования мощности ядерного энергетического реактора на тепловых нейтронах (рис. 11.11). Сначала составим дифференциальные уравнения устройств системы регулирования. Задатчик мощности реактора образует сигнал ошибки по нейтронному потоку  и компенсирует нелинейность, вызываемую зависимостью коэффициента усиления реактора от нейтронного потока. Поэтому сигнал ионизационной камеры
и компенсирует нелинейность, вызываемую зависимостью коэффициента усиления реактора от нейтронного потока. Поэтому сигнал ионизационной камеры  пропорционален выходной мощности реактора.
пропорционален выходной мощности реактора.

Рис. IX.6. Структурная схема системы автоматической стабилизации самолета по углу тангажа
Обозначим  напряжение, пропорциональное заданной мощности реактора, а
напряжение, пропорциональное заданной мощности реактора, а  напряжение питания; тогда
напряжение питания; тогда

где 
При  напряжение
напряжение  откуда
откуда

или

Из рис. 11.11 можно найти, что

т. е.

В полученном выражении будем считать

где  — соответствующие плотности нейтронного потока.
— соответствующие плотности нейтронного потока.
Имея это в виду, получим

где
Уравнение электронного усилителя примем следующим:

где  — коэффициент усиления электронного усилителя.
— коэффициент усиления электронного усилителя.
Дифференциальные уравнения соленоида и гидравлического поршневого привода представим в виде

где  — коэффициент усиления и постоянная времени соленоида;
— коэффициент усиления и постоянная времени соленоида;  — коэффициент демпфирования соленоида;
— коэффициент демпфирования соленоида;  — перемещение якоря;
— перемещение якоря;

где  — коэффициент усиления гидравлического привода;
— коэффициент усиления гидравлического привода;  — постоянная времени гидравлического привода; — степень демпфирования гидравлического привода;
— постоянная времени гидравлического привода; — степень демпфирования гидравлического привода;  — перемещение штока поршня.
— перемещение штока поршня.
Поршень гидравлического привода связан с управляющим стержнем реактора механической передачей с коэффициентом редукции  ; тогда перемещение стержня
; тогда перемещение стержня  Для простоты математических выкладок будем считать, что менаду перемещением стержня
Для простоты математических выкладок будем считать, что менаду перемещением стержня  и реактивностью
и реактивностью  имеется линеиная связь вида
имеется линеиная связь вида

или с учетом редукции механической передачи

где

Тахометрическая обратная связь с четырехполюсником RC описывается следующими уравнениями:

где  — крутизна характеристики тахогенератора, и
— крутизна характеристики тахогенератора, и

здесь  — постоянная времени фазоопережающего четырехполюсника
— постоянная времени фазоопережающего четырехполюсника 
Уравнения сравнивающих устройств при отрицательной обратной связи запишем в виде

К уравнениям (IX.84)-(IX.87), (IX.89), (IX.92) применим преобразования Лапласа; тогда

Передаточную функцию ядерного реактора (IX.48) можно представить в виде

По передаточным функциям (IX.93), (IX.95) и уравнениям сравнения (IX.94) на рис. IX.7 построена структурная схема системы автоматического регулирования мощности ядерного энергетического реактора на тепловых нейтронах.

Рис. IX.7. Структурная схема системы автоматического регулирования мощности ядерного энергетического реактора на тепловых нейтронах
Пример IX.6. Составить структурную схему системы автоматического регулирования концентрации сернистого газа по упрощенной принципиальной схеме (см. рис. II.7).
Передаточные функции отдельных устройств системы будем выполнять, пользуясь данными гл. 
Для анализатора газа

для электронного усилителя

для электромашинного усилителя малой мощности

для электрического двигателя постоянного тока

для гидравлического сервопривода большой мощности

где  — угол поворота заслонки;
— угол поворота заслонки;  — угол поворота электродвигателя постоянного тока; для объекта регулирования с учетом длинного трубопровода
— угол поворота электродвигателя постоянного тока; для объекта регулирования с учетом длинного трубопровода

где  — время «чистого» запаздывания;
— время «чистого» запаздывания;
для корректирующего устройства типа RC

для тахометрической обратной связи

для первого элемента сравнения

для второго элемента сравнения

для сумматора

По полученным передаточным функциям и уравнениям сравнения на рис. IX.8 построена структурная схема системы автоматического регулирования концентрации сернистого газа [69]. Из структурной схемы видно, что рассмотренная система является трехконтурной. Контуры I и II образованы внутренними гибкими обратными связями, а контур III — главной обратной связью системы.
В заключение составим структурную схему следящей системы с перекрещивающимися линиями связей. Принципиальная схема и блок-схема этой системы показаны на рис. II.13 и II.14.
Составим уравнения отдельных устройств:

где  — коэффициент трансформации сельсинной схемы;
— коэффициент трансформации сельсинной схемы;  — угол рассогласования;
— угол рассогласования;
для магнитного усилителя (первый каскад)

где  — коэффициент усиления и постоянная времени первого каскада магнитного усилителя;
— коэффициент усиления и постоянная времени первого каскада магнитного усилителя;  — напряжение на входе магнитного усилителя; их — напряжение на выходе первого каскада магнитного усилителя; для магнитного усилителя (второй каскад)
— напряжение на входе магнитного усилителя; их — напряжение на выходе первого каскада магнитного усилителя; для магнитного усилителя (второй каскад)

где  — коэффициент усиления и постоянная времени второго каскада магнитного усилителя;
— коэффициент усиления и постоянная времени второго каскада магнитного усилителя;  — напряжение на выходе второго каскада магнитного усилителя.
— напряжение на выходе второго каскада магнитного усилителя.
Уравнения динамики электромашинного усилителя, работающего на электрический двигатель, запишем в виде, аналогичном формулам (V.41)-(V.43), т. е.

где  — угол поворота электродвигателя;
— угол поворота электродвигателя;  — постоянная противо-ЭДС электродвигателя.
— постоянная противо-ЭДС электродвигателя.

Рис. IX.8. Структурная схема системы автоматического регулирования концентрации сернистого газа
Уравнения электродвигателя представим в виде

десь  — моментная постоянная электродвигателя;
— моментная постоянная электродвигателя;

где  — передаточное число редуктора.
— передаточное число редуктора.
Наряду с этим имеем следующие уравнения сравнения [см. также формулы (IX.6)]:

Для тахометрической обратной связи имеем

Напряжение  с выхода тахометрической обратной связи (см. рис. 11.13) поступает на вход первого каскада магнитного усилителя, т. е.
с выхода тахометрической обратной связи (см. рис. 11.13) поступает на вход первого каскада магнитного усилителя, т. е.

В соответствии с полученными уравнениями определим передаточные функции в виде


 -Уравнения для сравнивающих элементов:
-Уравнения для сравнивающих элементов:

По передаточным функциям (IX. 104) и уравнениям сравнения (IX. 105) на рис. IX.9, а построена структурная схема следящей системы.
Из схемы видно, что в ней имеется перекрещивающиеся связи по  Перекрещивающиеся внутренние связи затрудняют получение передаточных функций внутренних контуров и всей системы в целом. Для удобства расчетов перекрещивающиеся связи следует устранять (рис. IX.9, б), используя для этой цели структурные преобразования, описываемые ниже.
Перекрещивающиеся внутренние связи затрудняют получение передаточных функций внутренних контуров и всей системы в целом. Для удобства расчетов перекрещивающиеся связи следует устранять (рис. IX.9, б), используя для этой цели структурные преобразования, описываемые ниже.
Рис. IX.9. (см. скан) Структурные схемы следящей системы с перскрещиеакицимися обратными связями: а — исходная схема; б — преобразованная схема
Оглавление
- ПРЕДИСЛОВИЕ
- ВВЕДЕНИЕ
- Глава 1. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
- 1. ПРИНЦИПЫ ДЕЙСТВИЯ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 2. ОСНОВНЫЕ УСТРОЙСТВА СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 3. ВИДЫ УПРАВЛЯЮЩИХ И ВОЗМУЩАЮЩИХ ВОЗДЕЙСТВИЙ
- 4. СТАТИЧЕСКИЕ И АСТАТИЧЕСКИЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- Глава II. ВИДЫ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛТРОВАНИЯ
- 1. КЛАССИФИКАЦИЯ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 2. НЕПРЕРЫВНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 3. ДИСКРЕТНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 4. ДИСКРЕТНО-НЕПРЕРЫВНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 5. ЭКСТРЕМАЛЬНЫЕ И САМОНАСТРАИВАЮЩИЕСЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 6. ПРИМЕНЕНИЕ ЦВМ В СИСТЕМАХ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 7. ПРИМЕНЕНИЕ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДЛЯ УПРАВЛЕНИЯ СЛОЖНЫМИ ПРОИЗВОДСТВЕННЫМИ ПРОЦЕССАМИ. СИСТЕМЫ КОМПЛЕКСНОЙ АВТОМАТИЗАЦИИ ПРОИЗВОДСТВА
- Глава III. ОБЪЕКТЫ РЕГУЛИРОВАНИЯ
- 1. ОСНОВНЫЕ СВОЙСТВА ОБЪЕКТОВ РЕГУЛИРОВАНИЯ
- 2. ОСОБЕННОСТИ МАТЕМАТИЧЕСКОГО ОПИСАНИЯ ОБЪЕКТОВ РЕГУЛИРОВАНИЯ
- 3. ЛИНЕАРИЗАЦИЯ УРАВНЕНИЙ ДИНАМИКИ
- 4. УСТОЙЧИВЫЕ СТАТИЧЕСКИЕ ОБЪЕКТЫ (ДИЗЕЛЬ, ГИДРОТУРБИНА, САМОЛЕТ)
- 5. НЕУСТОЙЧИВЫЕ СТАТИЧЕСКИЕ ОБЪЕКТЫ (РЕСИВЕР, РАКЕТА-НОСИТЕЛЬ КОСМИЧЕСКИХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ)
- 6. АСТАТИЧЕСКИЕ ОБЪЕКТЫ (ТРЕХФАЗНЫЙ ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ, ЯДЕРНЫЙ ЭНЕРГЕТИЧЕСКИЙ РЕАКТОР НА ТЕПЛОВЫХ НЕЙТРОНАХ, КОСМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ)
- 7. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ОБЪЕКТОВ РЕГУЛИРОВАНИЯ
- Глава IV. ИЗМЕРИТЕЛЬНЫЕ УСТРОЙСТВА
- 1. ОПРЕДЕЛЕНИЕ ИНФОРМАТИВНОСТИ ИЗМЕРИТЕЛЬНЫХ УСТРОЙСТВ И ИЗМЕРИТЕЛЬНЫХ ПОДСИСТЕМ
- 2. КЛАССИФИКАЦИЯ ИЗМЕРИТЕЛЬНЫХ УСТРОЙСТВ
- 3. УСТРОЙСТВА ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ, СКОРОСТЕЙ И УСКОРЕНИЙ
- Индуктивные устройства.
- Емкостные устройства.
- Сельсины.
- Дифференциальный сельсин.
- Погрешность сельсинов.
- Устройства для замера угловых скоростей.
- Устройства замера угловых ускорений.
- 4. УСТРОЙСТВА ДЛЯ ИЗМЕРЕНИЯ НАПРЯЖЕНИЯ И ТОКА
- 5. УСТРОЙСТВА ДЛЯ ИЗМЕРЕНИЯ ТЕМПЕРАТУР И ИЗЛУЧЕНИЙ
- 6. УСТРОЙСТВА ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЙ И РАСХОДОВ ЖИДКОСТИ И ГАЗА
- 7. УСТРОЙСТВА ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ВЕЛИЧИН, УГЛОВЫХ СКОРОСТЕЙ И ЛИНЕЙНЫХ УСКОРЕНИЙ ПОДВИЖНЫХ ОБЪЕКТОВ
- Устройства для измерения линейных ускорений подвижных объектов (акселерометры).
- 8. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ИЗМЕРИТЕЛЬНЫХ УСТРОЙСТВ
- Глава V. УСИЛИТЕЛЬНЫЕ УСТРОЙСТВА
- 1. ЭЛЕКТРОННЫЕ УСИЛИТЕЛИ
- 2. МАГНИТНЫЕ УСИЛИТЕЛИ
- 3. ЭЛЕКТРОМАШИННЫЕ УСИЛИТЕЛИ
- 4. ГИДРАВЛИЧЕСКИЕ УСИЛИТЕЛИ
- 5. ПНЕВМАТИЧЕСКИЕ УСИЛИТЕЛИ
- 6. СРАВНИТЕЛЬНЫЕ ХАРАКТЕРИСТИКИ РАЗЛИЧНЫХ УСИЛИТЕЛЕЙ
- ГЛАВА VI. ПРЕОБРАЗУЮЩИЕ УСТРОЙСТВА
- 1. УСИЛИТЕЛИ-ПРЕОБРАЗОВАТЕЛИ
- 2. РЕЛЕ
- 3. ФУНКЦИОНАЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ
- 4. ПРЕОБРАЗОВАТЕЛИ АНАЛОГ—КОД
- 5. ПРЕОБРАЗОВАТЕЛИ КОД—АНАЛОГ
- 6. ЭЛЕКТРОННЫЕ АНАЛОГОВЫЕ ВЫЧИСЛИТЕЛЬНЫЕ УСТРОЙСТВА
- 7. ЭЛЕКТРОННЫЕ ЦИФРОВЫЕ УПРАВЛЯЮЩИЕ ВЫЧИСЛИТЕЛЬНЫЕ МАШИНЫ
- 8. ПНЕВМАТИЧЕСКИЕ АНАЛОГОВЫЕ И ЦИФРОВЫЕ ВЫЧИСЛИТЕЛЬНЫЕ УСТРОЙСТВА
- 9. ТОЧНОСТЬ РАБОТЫ И БЫСТРОДЕЙСТВИЕ УПРАВЛЯЮЩИХ ЦИФРОВЫХ ВЫЧИСЛИТЕЛЬНЫХ МАШИН
- 10. СРАВНИТЕЛЬНАЯ ОЦЕНКА ПРЕОБРАЗУЮЩИХ УСТРОЙСТВ
- Глава VII. ИСПОЛНИТЕЛЬНЫЕ ЭЛЕМЕНТЫ
- 1. ЭЛЕКТРИЧЕСКИЕ СЕРВОДВИГАТЕЛИ
- 2. МЕХАНИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ ЭЛЕМЕНТЫ
- 3. ГИДРАВЛИЧЕСКИЕ СЕРВОДВИГАТЕЛИ
- 4. ПНЕВМАТИЧЕСКИЕ СЕРВОДВИГАТЕЛИ
- 5. МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ
- 6. СРАВНИТЕЛЬНАЯ ОЦЕНКА ИСПОЛНИТЕЛЬНЫХ ЭЛЕМЕНТОВ
- Глава VIII. КОРРЕКТИРУЮЩИЕ УСТРОЙСТВА
- 1. ЛИНЕЙНЫЕ ПАССИВНЫЕ И АКТИВНЫЕ ЭЛЕКТРИЧЕСКИЕ КОРРЕКТИРУЮЩИЕ УСТРОЙСТВА
- 2. НЕЛИНЕЙНЫЕ ПАССИВНЫЕ И АКТИВНЫЕ ЭЛЕКТРИЧЕСКИЕ КОРРЕКТИРУЮЩИЕ УСТРОЙСТВА
- 3. ГИДРАВЛИЧЕСКИЕ И ПНЕВМАТИЧЕСКИЕ КОРРЕКТИРУЮЩИЕ УСТРОЙСТВА
- 4. КОРРЕКТИРУЮЩИЕ УСТРОЙСТВА НА ЛИНИЯХ ЗАДЕРЖЕК И ДИСКРЕТНЫХ ЭЛЕМЕНТАХ
- Глава IX. УРАВНЕНИЯ ДИНАМИКИ ОБЪЕКТОВ, УСТРОЙСТВ И СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И ИХ СТРУКТУРНЫЕ СХЕМЫ
- 1. ПРЕДСТАВЛЕНИЕ ОБЪЕКТОВ И УСТРОЙСТВ СИСТЕМ РЕГУЛИРОВАНИЯ С СОСРЕДОТОЧЕННЫМИ ЭЛЕМЕНТАМИ В ВИДЕ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ
- 2. ПРЕДСТАВЛЕНИЕ УСТРОЙСТВ СИСТЕМ РЕГУЛИРОВАНИЯ С РАСПРЕДЕЛЕННЫМИ ЭЛЕМЕНТАМИ В ВИДЕ ТРАНСЦЕДЕНТНЫХ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ
- 3. СОСТАВЛЕНИЕ СТРУКТУРНЫХ СХЕМ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 4. ПРЕОБРАЗОВАНИЕ СТРУКТУРНЫХ СХЕМ
- 5. ПЕРЕДАТОЧНЫЕ ФУНКЦИИ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 6. ОПИСАНИЕ ОБЪЕКТОВ, УСТРОЙСТВ И СИСТЕМ РЕГУЛИРОВАНИЯ В ВЕКТОРНО-МАТРИЧНОЙ ФОРМЕ
- 7. УРАВНЕНИЯ СОСТОЯНИЯ ЛИНЕЙНЫХ СТАЦИОНАРНЫХ СИСТЕМ РЕГУЛИРОВАНИЯ
- 8. УРАВНЕНИЯ СОСТОЯНИЯ ЛИНЕЙНЫХ НЕСТАЦИОНАРНЫХ СИСТЕМ РЕГУЛИРОВАНИЯ
- 9. РЕШЕНИЕ ЛИНЕЙНЫХ СТАЦИОНАРНЫХ И НЕСТАЦИОНАРНЫХ УРАВНЕНИЙ СОСТОЯНИЯ
- 10. ОПРЕДЕЛЕНИЕ ПЕРЕХОДНЫХ МАТРИЦ ЛИНЕЙНЫХ СТАЦИОНАРНЫХ И НЕСТАЦИОНАРНЫХ СИСТЕМ
- 11. УПРАВЛЯЕМОСТЬ И НАБЛЮДАЕМОСТЬ ЛИНЕЙНЫХ СИСТЕМ
- 12. ПРЕДСТАВЛЕНИЕ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ОБЪЕКТОВ, УСТРОЙСТВ И СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ИМПУЛЬСНЫМИ ПЕРЕХОДНЫМИ ФУНКЦИЯМИ
- Глава X. ДИНАМИЧЕСКИЕ ЗВЕНЬЯ, ИХ АМПЛИТУДНО-ФАЗОВЫЕ И ЛОГАРИФМИЧЕСКИЕ ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ
- 1. АПЕРИОДИЧЕСКОЕ ЗВЕНО
- Логарифмические амплитудная и фазовая частотные характеристики апериодического звена.
- 2. АПЕРИОДИЧЕСКОЕ НЕУСТОЙЧИВОЕ ЗВЕНО
- 4. ИНТЕГРИРУЮЩЕЕ ЗВЕНО
- 5. КОЛЕБАТЕЛЬНЫЕ ЗВЕНЬЯ (УСТОЙЧИВЫЕ И НЕУСТОЙЧИВЫЕ)
- 6. ДИФФЕРЕНЦИРУЮЩЕЕ ЗВЕНО ПЕРВОГО РОДА
- 7. ДИФФЕРЕНЦИРУЮЩЕЕ ЗВЕНО ВТОРОГО РОДА
- 8. ТРАНСЦЕНДЕНТНЫЕ ЗВЕНЬЯ
- 9. ФАЗОВАЯ ЛИНЕЙКА
- 10. ПОСТРОЕНИЕ АМПЛИТУДНО-ФАЗОВЫХ И ЛОГАРИФМИЧЕСКИХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК ПОСЛЕДОВАТЕЛЬНО СОЕДИНЕННЫХ ГРУПП ТИПОВЫХ ЗВЕНЬЕВ
- 11. ЭКСПЕРИМЕНТАЛЬНЫЙ МЕТОД ОПРЕДЕЛЕНИЯ ВИДА ПЕРЕДАТОЧНЫХ ФУНКЦИЙ И ПАРАМЕТРОВ ГРУПП ДИНАМИЧЕСКИХ ЗВЕНЬЕВ
- ГЛАВА XI. ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 1. ОБЩАЯ ПОСТАНОВКА ЗАДАЧИ УСТОЙЧИВОСТИ ПО ЛЯПУНОВУ
- 2. ОПРЕДЕЛЕНИЕ ФУНКЦИЙ ЛЯПУНОВА МЕТОДАМИ Г. СЕГЕ И Д. ШУЛЬЦА
- 3. УСТОЙЧИВОСТЬ ЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 4. АЛГЕБРАИЧЕСКИЕ КРИТЕРИИ УСТОЙЧИВОСТИ
- 5. ЧАСТОТНЫЕ КРИТЕРИИ УСТОЙЧИВОСТИ
- 6. АНАЛИЗ УСТОЙЧИВОСТИ ОДНОКОНТУРНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 7. АНАЛИЗ УСТОЙЧИВОСТИ МНОГОКОНТУРНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 8. АНАЛИЗ УСТОЙЧИВОСТИ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ С ТРАНСЦЕНДЕНТНЫМИ ЗВЕНЬЯМИ
- 9. ВЫДЕЛЕНИЕ ОБЛАСТЕЙ УСТОЙЧИВОСТИ С ПОМОЩЬЮ D-РАЗБИЕНИЯ
- Глава XII. ИССЛЕДОВАНИЕ КАЧЕСТВА СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 1. ОСНОВНЫЕ ПОКАЗАТЕЛИ КАЧЕСТВА ПРОЦЕССОВ РЕГУЛИРОВАНИЯ
- 2. ПОСТРОЕНИЕ ПЕРЕХОДНЫХ ПРОЦЕССОВ ПО ЗАДАННЫМ ПЕРЕДАТОЧНЫМ ФУНКЦИЯМ ЗАМКНУТЫХ СИСТЕМ
- 3. ОПРЕДЕЛЕНИЕ ПОКАЗАТЕЛЕЙ КАЧЕСТВА ПО РАСПОЛОЖЕНИЮ НУЛЕЙ И ПОЛЮСОВ ЛЕРЕДАТОЧНОЙ ФУНКЦИИ ЗАМКНУТОЙ СИСТЕМЫ
- 4. МЕТОД КОРНЕВОГО ГОДОГРАФА
- 5. ИНТЕГРАЛЬНЫЕ ОЦЕНКИ КАЧЕСТВА
- 6. ОБОБЩЕННЫЕ ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ЗАМКНУТЫХ СИСТЕМ РЕГУЛИРОВАНИЯ И ИХ СВЯЗЬ С ХАРАКТЕРИСТИКАМИ ПЕРЕХОДНЫХ ПРОЦЕССОВ
- 7. ОПРЕДЕЛЕНИЕ ВЕЩЕСТВЕННЫХ И МНИМЫХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК ЗАМКНУТЫХ СИСТЕМ ПО АМПЛИТУДНО-ФАЗОВЫМ И ЛОГАРИФМИЧЕСКИМ ЧАСТОТНЫМ ХАРАКТЕРИСТИКАМ РАЗОМКНУТЫХ СИСТЕМ
- 8. ЧАСТОТНЫЕ ОЦЕНКИ КАЧЕСТВА СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 9. ЧАСТОТНЫЕ МЕТОДЫ ПОСТРОЕНИЯ ПЕРЕХОДНЫХ ПРОЦЕССОВ С ПОМОЩЬЮ ТРАПЕЦЕИДАЛЬНЫХ ХАРАКТЕРИСТИК
- 10. УСТАНОВЛЕНИЕ НОРМ ЗАПАСОВ УСТОЙЧИВОСТИ ПО ФАЗЕ И МОДУЛЮ, ОБЕСПЕЧИВАЮЩИХ ТРЕБУЕМЫЕ ПОКАЗАТЕЛИ КАЧЕСТВА СИСТЕМ РЕГУЛИРОВАНИЯ
- ГЛАВА XIII. ДИНАМИЧЕСКАЯ ТОЧНОСТЬ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 2. ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТОВ ОШИБОК В СИСТЕМАХ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ С ПОМОЩЬЮ ЛОГАРИФМИЧЕСКИХ АМПЛИТУДНЫХ ХАРАКТЕРИСТИК
- 3. ПОВЫШЕНИЕ ТОЧНОСТИ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПУТЕМ ПРИМЕНЕНИЯ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ
- 4. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ СЛУЧАЙНЫХ ПРОЦЕССОВ
- 5. СВОЙСТВА КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ СТАЦИОНАРНЫХ ПРОЦЕССОВ
- 6. СВОЙСТВА СПЕКТРАЛЬНОЙ ПЛОТНОСТИ МОЩНОСТИ
- 7. ОПЕРАЦИИ НАД СЛУЧАЙНЫМИ ПРОЦЕССАМИ
- 8. ПРЕОБРАЗОВАНИЕ СЛУЧАЙНЫХ СИГНАЛОВ ЛИНЕЙНЫМИ СИСТЕМАМИ
- 9. РАСЧЕТ ОШИБОК В СИСТЕМЕ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПРИ ДЕЙСТВИИ ШУМОВ
- 10. ОПТИМИЗАЦИЯ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПРИ ВОЗДЕЙСТВИИ СЛУЧАЙНЫХ СИГНАЛОВ И ШУМОВ
- ГЛАВА XIV. НЕЛИНЕЙНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 1. ТИПОВЫЕ НЕЛИНЕЙНЫЕ ЭЛЕМЕНТЫ В СИСТЕМАХ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 2. ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ НЕЛИНЕЙНЫХ СИСТЕМ ПО ВТОРОМУ МЕТОДУ ЛЯПУНОВА
- 3. АНАЛИЗ УСТОЙЧИВОСТИ НЕЛИНЕЙНЫХ СИСТЕМ МЕТОДОМ ФАЗОВОЙ ПЛОСКОСТИ
- 4. ПРИМЕНЕНИЕ МЕТОДА ГАРМОНИЧЕСКОЙ ЛИНЕАРИЗАЦИИ ДЛЯ АНАЛИЗА УСТОЙЧИВОСТИ НЕЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 5. СТРУКТУРНЫЕ ПРЕОБРАЗОВАНИЯ НЕЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 6. АНАЛИЗ АВТОКОЛЕБАНИЙ В СИСТЕМАХ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ С ДВУМЯ НЕЛИНЕЙНОСТЯМИ
- 7. ДВУХКОНТУРНЫЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 8. МЕДЛЕННО ИЗМЕНЯЮЩИЕСЯ ПРОЦЕССЫ В АВТОКОЛЕБАТЕЛЬНЫХ СИСТЕМАХ
- 9. СПОСОБЫ ПОДАВЛЕНИЯ АВТОКОЛЕБАНИЙ В НЕЛИНЕЙНЫХ СИСТЕМАХ
- 10. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ В НЕЛИНЕЙНЫХ СИСТЕМАХ
- 11. КРИТЕРИЙ АБСОЛЮТНОЙ УСТОЙЧИВОСТИ НЕЛИНЕЙНЫХ СИСТЕМ
- 12. СЛУЧАЙНЫЕ ПРОЦЕССЫ В НЕЛИНЕЙНЫХ СИСТЕМАХ
- Глава XIV. ИМПУЛЬСНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 1. МАТЕМАТИЧЕСКИЕ ОСНОВЫ ТЕОРИИ ИМПУЛЬСНЫХ УСТРОЙСТВ
- 2. ПЕРЕДАТОЧНЫЕ ФУНКЦИИ ИМПУЛЬСНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 3. АМПЛИТУДНО-ФАЗОВЫЕ ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ИМПУЛЬСНЫХ СИСТЕМ
- 4. ПРИМЕНЕНИЕ ВЕКТОРНО-МАТРИЧНОГО АППАРАТА К ИМПУЛЬСНЫМ СИСТЕМАМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 5. ОСНОВНЫЕ СВОЙСТВА z-ПРЕОБРАЗОВАНИЯ
- 6. МЕТОДЫ АНАЛИЗА УСТОЙЧИВОСТИ ИМПУЛЬСНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- Критерий устойчивости для импульсных систем на плоскостях z и W(z).
- Критерий устойчивости Шур—Кона.
- Критерии устойчивости, основанные на применении билинейного преобразования.
- 7. МЕТОДЫ АНАЛИЗА КАЧЕСТВА ИМПУЛЬСНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 8. МЕТОДЫ АНАЛИЗА ТОЧНОСТИ ИМПУЛЬСНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПРИ РЕГУЛЯРНЫХ И СЛУЧАЙНЫХ ВОЗДЕЙСТВИЯХ
- 9. СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ С УПРАВЛЯЮЩИМИ ЦВМ
- 10. СПОСОБЫ РЕАЛИЗАЦИИ АЛГОРИТМОВ В УПРАВЛЯЮЩИХ ЦВМ И ОПРЕДЕЛЕНИЕ ИХ ОСНОВНЫХ ПАРАМЕТРОВ
- Глава XVI. ЭКСТРЕМАЛЬНЫЕ И САМОНАСТРАИВАЮЩИЕСЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 1. МЕТОДЫ ПОИСКА ЭКСТРЕМУМА
- 2. СПОСОБЫ ОРГАНИЗАЦИИ ДВИЖЕНИЯ К ЭКСТРЕМУМУ
- 3. МЕТОДЫ РАСЧЕТА ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ЭКСТРЕМАЛЬНЫХ РЕГУЛЯТОРОВ
- 4. ВЫБОР КОРРЕКТИРУЮЩИХ УСТРОЙСТВ В ЭКСТРЕМАЛЬНЫХ РЕГУЛЯТОРАХ
- 5. ЭКСТРЕМАЛЬНЫЕ СИСТЕМЫ С ВЫЧИСЛИТЕЛЬНЫМИ МАШИНАМИ
- Глава XVII. СИНТЕЗ НЕПРЕРЫВНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПРИ РЕГУЛЯРНЫХ ВОЗДЕЙСТВИЯХ
- 2. ВЫБОР ПАРАМЕТРОВ УСТРОЙСТВ НЕИЗМЕНЯЕМОЙ ЧАСТИ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 3. ПОСТРОЕНИЕ ЖЕЛАЕМОЙ АМПЛИТУДНОЙ ХАРАКТЕРИСТИКИ СИСТЕМЫ РЕГУЛИРОВАНИЯ
- 4. СИНТЕЗ ПОСЛЕДОВАТЕЛЬНЫХ КОРРЕКТИРУЮЩИХ УСТРОЙСТВ
- 5. СИНТЕЗ ПАРАЛЛЕЛЬНЫХ КОРРЕКТИРУЮЩИХ УСТРОЙСТВ
- 6. СИНТЕЗ ПОСЛЕДОВАТЕЛЬНЫХ И ПАРАЛЛЕЛЬНЫХ КОРРЕКТИРУЮЩИХ УСТРОЙСТВ
- 7. СПОСОБЫ РЕАЛИЗАЦИИ ПОСЛЕДОВАТЕЛЬНЫХ И ПАРАЛЛЕЛЬНЫХ КОРРЕКТИРУЮЩИХ УСТРОЙСТВ
- Глава XVIII. СИНТЕЗ НЕПРЕРЫВНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПРИ СЛУЧАЙНЫХ ВОЗДЕЙСТВИЯХ
- 1. ПОСТАНОВКА ЗАДАЧИ СИНТЕЗА НА ОСНОВЕ КРИТЕРИЯ МИНИМУМА ИНТЕГРАЛЬНОЙ ОШИБКИ
- 2. СИНТЕЗ СИСТЕМ РЕГУЛИРОВАНИЯ ПРИ НАЛИЧИИ ПОЛЕЗНОГО СИГНАЛА И ПОМЕХИ
- 3. ФОРМУЛЫ ДЛЯ ОПРЕДЕЛЕНИЯ ПЕРЕДАТОЧНОЙ ФУНКЦИИ ЖЕЛАЕМОЙ СИСТЕМЫ
- 4. ПРИМЕР СИНТЕЗА КОРРЕКТИРУЮЩИХ УСТРОЙСТВ СИСТЕМЫ РЕГУЛИРОВАНИЯ ПРИ ДЕЙСТВИИ ПОЛЕЗНОГО СИГНАЛА И ПОМЕХИ
- ГЛАВА XIX. СИНТЕЗ ДИСКРЕТНО-НЕПРЕРЫВНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 1. СИНТЕЗ ДИСКРЕТНЫХ КОРРЕКТИРУЮЩИХ УСТРОЙСТВ, ОСНОВАННЫЙ НА ПРИМЕНЕНИИ БИЛИНЕЙНОГО ПРЕОБРАЗОВАНИЯ
- 2. СИНТЕЗ ДИСКРЕТНО-НЕПРЕРЫВНЫХ СИСТЕМ ПРИ НАЛИЧИИ ПОЛЕЗНОГО СИГНАЛА И ПОМЕХИ
- 3. РЕАЛИЗАЦИЯ ДИСКРЕТНЫХ КОРРЕКТИРУЮЩИХ УСТРОЙСТВ ПРИ ПОМОЩИ RC-ЦЕПЕЙ
- 4. РЕАЛИЗАЦИЯ ПРОГРАММ КОРРЕКЦИИ НА УПРАВЛЯЮЩЕЙ ЦИФРОВОЙ ВЫЧИСЛИТЕЛЬНОЙ МАШИНЕ
- ГЛАВА XX. СИНТЕЗ ОПТИМАЛЬНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
- 2. ПРИНЦИП МАКСИМУМА
- 3. ТЕОРЕМА О ЧИСЛЕ ПЕРЕКЛЮЧЕНИЙ
- 4. ПРИМЕРЫ ПРИМЕНЕНИЯ ПРИНЦИПА МАКСИМУМА
- 5. МЕТОД ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
- 6. СИНТЕЗ НЕПРЕРЫВНЫХ ОПТИМАЛЬНЫХ СИСТЕМ
- ПРИЛОЖЕНИЯ
- СПИСОК ЛИТЕРАТУРЫ
Содержание
- Назначение структурных схем. Виды структурных схем. Элементы алгоритмических структурных схем.
- Что такое структурная схема
- На рис.1 приведена упрощенная структурная схема телефона
- Процессор как правило специализированный и содержит множество дополнительных возможностей.
- Схемы электрические структурные
- Назначение
- Объединенная
- Структурная
- Функциональная
- Монтажная
- Принципиальная
- Описание структурной схемы
- Схемы электрические. Типы схем
Назначение структурных схем. Виды структурных схем. Элементы алгоритмических структурных схем.
Что такое структурная схема
Структурная схема показывает основные функциональные части электронного изделия, назначение электронных блоков и взаимосвязи между ними. Схема отображает принцип действия электронных аппаратов в общем виде.
Действительное расположение компонентов на структурной схеме не учитывают и способ связи не раскрывают. Построение схемы должно давать наглядное представление о
- Электронном изделии,
- последовательности взаимодействия функциональных частей в изделии. Функциональные части на схеме показаны в виде прямоугольников или условных графических обозначений. При изображении функциональных частей в виде прямоугольников их наименования, типы и обозначения вписывают внутрь прямоугольников.
Направление хода процесса, происходящего в изделии, показаны стрелками, соединяющими функциональные части. На схемах простых изделии функциональные части располагают в виде цепочки в соответствии с ходом рабочего процесса в направлении слева направо. Схемы, содержащие несколько основных рабочих каналов, рекомендуется вычерчивать в виде параллельных горизонтальных строк.
Ниже на нескольких примерах показаны правила и особенности построения структурных схем устройств и систем.
На рис.1 приведена упрощенная структурная схема телефона
Мобильный телефон имеет структуру микропроцессорной системы, которая содержит: — ЦП (один или два)
— контролер (зачастую ПЛИС), усилитель, диплексер радиочастотного тракта
Процессор как правило специализированный и содержит множество дополнительных возможностей.
Схемы электрические структурные
6.3.1 Схема электрическая структурная (код Э1) – схема, определяющая основные функциональные части изделия, их назначение и взаимосвязи.
Данные схемы разрабатывают при проектировании изделия на стадиях, предшествующих разработке схем других типов, и пользуются ими для общего ознакомления с изделием.
6.3.2 На схеме электрической структурной изображают все основные функциональные части изделия (элементы, устройства и функциональные группы) и основные взаимосвязи между ними.
Функциональные части изделия в соответствии с ГОСТ 2.721 изображают в виде прямоугольников, с размерами 10х10 или 10х15 мм или УГО, приведенных в соответствующих стандартах.
6.3.3 Графическое построение схемы должно давать наглядное представление о последовательности взаимодействия функциональных частей изделия. На линиях взаимосвязей рекомендуется стрелками обозначать направление хода процессов, происходящих в изделии.
6.3.4 На схеме должны быть указаны наименования каждой функциональной части изделия, если для ее обозначения применен прямоугольник. Наименования в этом случае вписывают внутрь прямоугольников в соответствии с рисунком 6.13.

Рисунок 6.13 – Пример выполнения схемы электрической структурной
При большом количестве функциональных частей допускается взамен наименования проставлять порядковые номера справа от изображения или над ним, как правило, сверху вниз в направлении слева направо, В этом случае наименования указывают в таблице произвольной формы, помещаемой на поле схемы в соответствии с рисунком 6.14.
| Порядковый номер | Наименование |
| 1 | Антенна |
| 2 | Колебательный контур |
| 3 | Детектор |
| 4 | Усилитель |
| 5 | Источник питания |
| 6 | Телефон |
Рисунок 6.14 – Схема электрическая структурная приемника прямого усиления
Следует обратить внимание на то, что при использовании цифровых обозначений вместо наименований функциональных частей наглядность схемы существенно ухудшается, так как назначение каждой функциональной составной части выясняется не только по изображению, но и с помощью перечня, приведенного в таблице.
ВНИМАНИЕ: В СТУДЕНЧЕСКИХ РАБОТАХ И ПРОЕКТАХ ПРИ ВЫПУСКЕ СХЕМ ЭЛЕКТРИЧЕСКИХ СТРУКТУРНЫХ, НАИМЕНОВАНИЯ ФУНКЦИОНАЛЬНЫХ УСТРОЙСТВ РЕКОМЕНДУЕТСЯ ВПИСЫВАТЬ ВНУТРЬ ПРЯМОУГОЛЬНИКОВ.
6.3.5 На схеме допускается помещать технические характеристики функциональных частей, поясняющие надписи, диаграммы или таблицы, определяющие последовательность процессов во времени, а также указывать параметры в характерных точках (величины напряжений, токов, форсы импульсов и т.п.).
6.3.6 На схемах несложных изделий функциональные части располагают в виде прямой цепочки в соответствии с направлением распространения сигнала слева направо.
Схемы изделий, содержащих несколько каналов распространения сигналов, рекомендуется выполнять в виде параллельных горизонтальных цепочек. Дополнительные и вспомогательные цепи при этом необходимо выводить из основных цепей.
Для повышения наглядности основные цепи рекомендуется располагать горизонтально, а дополнительные и вспомогательные – вертикально или горизонтально между основными цепями.
Пример выполнения схемы электрической структурной приведен в приложении М данного пособия.
Назначение
Схемы являются конструкторскими документами и содержат важные сведения для проектирования, разработки, сборки, регулирования и эксплуатации приборов.
Изображения отдельных электроцепей имеют различные предназначения:
- при проектировании позволяют определить конструктивные особенности изделия;
- при производстве — помогают учесть структуру предмета, подобрать технологию изготовления, монтажа и контроля продукта;
- при эксплуатации — поиск неполадок, ремонта и техобслуживания приборов.
Вам это будет интересно Особенности генератора электрической энергии
Для более полного понимания работы электросистем нужно изучить основные виды и назначение схем.
Как читать электросхемы
Объединенная
Схема объединяет несколько видов и типов чертежей, общее изображение позволяет обозначить значимые особенности цепи. Используется в производственных мощах с применением электрических, гидравлических, пневматических и кинематических элементов. Отдельные устройства, их связи изображают на одном объединенном изображении. Допускается также указывать на чертеже элементы и приборы, не включенные в оборудование, но необходимые для пояснения его принципов работы.
Обратите внимание! Графические обозначения дополнительных устройств отделяют на схеме штрих-пунктиром толщиной, аналогичной линиям связи, указывают местоположение деталей, разъяснения.
Наглядный пример общей схемы
Структурная
Структурную схему разрабатывают на старте проектирования с целью определения основных функциональных устройств конструкции, назначения взаимосвязи деталей. Материал отражает принцип действия системы в общих чертах. Функциональные части чертежа представлены прямоугольниками или условными графическими обозначениями. Названия, типы и обозначения вписаны в геометрические фигуры.
Важно! Действительное размещение структурных элементов на схеме не учитывается, способ связи не раскрывается.
Направление процесса, протекающего в системе, обозначено стрелками, соединяющими функциональные детали (прямоугольники с названиями). Структурные элементы простых устройств расположены на схеме в виде цепочки, соответствующей ходу рабочих процессов в направлении слева направо. При наличии нескольких рабочих каналов, их отображают в виде параллельных горизонтальных строк. Порядок чтения со стрелками и поясняющими надписями позволяет разобраться в структурной электрической схеме даже новичку.
Структурный чертеж
Функциональная
Изображение содержит рабочие элементы объекта, функциональные связи деталей, технические характеристики и параметры в характерных точках, письменные пояснения. Для сложных систем требуется несколько функциональных схем с пояснением происходящих процессов в соответствующих режимах работы. Количество функциональных чертежей, уровень детализации и объем информации определяется проектировщиком с учетом особенностей объекта.
Регламента по созданию условных графических обозначений нет (допускается использование прямоугольников с надписями), действуют только общие требования к оформлению конструкторских или технологических документов.
Функциональная электроцепь Э2
Монтажная
Монтажные схемы показывают действительное местоположение компонентов внутри и снаружи объекта. Чертежи создают для создания радиосистем, электрических шкафов, бытовых устройств. Так, электросхема проводки квартиры позволит рассмотреть точки монтажа розеток, светильников, люстры.
Вам это будет интересно Электронный преобразователь напряжения с 12 В на 220 В
Список компонентов монтажного чертежа включает радиодетали, узлы и компоненты, не соединенных между собой дорожками. На выводах устройств указан маршрут (буквенно-цифровые обозначения, указывающие на детали, рекомендуемые для соединения). Разработке монтажного рисунка предшествует принципиальная схема.
Монтажная электросхема квартиры
Принципиальная
Основное назначение принципиальных электросхем — полное и наглядное отображение взаимной связи отдельных приборов, элементов автоматики и дополнительной аппаратуры, оставляющей функциональные узлы автономных систем, с учетом последовательности работы и принципа действия. Использование чертежей упрощает пуско-наладочные работы и эксплуатацию оборудования. Схематические изображения систем также выступают основой для построения монтажных чертежей, таблиц щитов, пультов, наглядного отображения принципа подсоединения внешних проводок, подключения деталей.
Разработка принципиальных изображений согласована с алгоритмами действия отдельных узлов: контрольных, сигнализационных, регулировочных и управленческих. Также учитываются требования, предъявляемые к объекту. Условный вид схем позволяет рассмотреть приборы, аппараты, линии связи отдельных элементов, блоки, модули устройств.
Принципиальная электросхема передатчика радиостанции Р-861 М1
Описание структурной схемы
Автоматическая система регулирования температуры
Источник
Схемы электрические. Типы схем
Привет Хабр!
Чаще в статьях приводят вместо электрических схем красочные картинки, из-за этого возникают споры в комментариях.
В связи с этим, решил написать небольшую статью-ликбез по типам электрических схем, классифицируемых в Единой системе конструкторской документации (ЕСКД).
На протяжении всей статьи буду опираться на ЕСКД.
Рассмотрим ГОСТ 2.701-2008 Единая система конструкторской документации (ЕСКД). Схемы. Виды и типы. Общие требования к выполнению.
Данный ГОСТ вводит понятия:
- вид схемы — классификационная группировка схем, выделяемая по признакам принципа действия, состава изделия и связей между его составными частями;
- тип схемы — классификационная группировка, выделяемая по признаку их основного назначения.
Сразу договоримся, что вид схем у нас будет единственный — схема электрическая (Э).
Разберемся какие типы схем описаны в данном ГОСТе.
| Тип схемы | Определение | Код типа схемы |
|---|---|---|
| Схема структурная | Документ, определяющий основные функциональные части изделия, их назначение и взаимосвязи | 1 |
| Схема функциональная | Документ, разъясняющий процессы, протекающие в отдельных функциональных цепях изделия (установки) или изделия (установки) в целом | 2 |
| Схема принципиальная (полная) | Документ, определяющий полный состав элементов и взаимосвязи между ними и, как правило, дающий полное (детальное) представления о принципах работы изделия (установки) | 3 |
| Схема соединений (монтажная) | Документ, показывающий соединения составных частей изделия (установки) и определяющий провода, жгуты, кабели или трубопроводы, которыми осуществляются эти соединения, а также места их присоединений и ввода (разъемы, платы, зажимы и т.п.) | 4 |
| Схема подключения | Документ, показывающий внешние подключения изделия | 5 |
| Схема общая | Документ, определяющий составные части комплекса и соединения их между собой на месте эксплуатации | 6 |
| Схема расположения | Документ, определяющий относительное расположение составных частей изделия (установки), а при необходимости, также жгутов (проводов, кабелей), трубопроводов, световодов и т.п. | 7 |
| Схема объединенная | Документ, содержащий элементы различных типов схем одного вида | 0 |
| Примечание — Наименования типов схем, указанные в скобках, устанавливают для электрических схем энергетических сооружений. |
Далее рассмотрим каждый тип схем более подробно применительно для электрических схем.
Основной документ: ГОСТ 2.702-2011 Единая система конструкторской документации (ЕСКД). Правила выполнения электрических схем.
Так, что же такое и с чем «едят» эти схемы электрические?
Нам даст ответ ГОСТ 2.702-2011: Схема электрическая — документ, содержащий в виде условных изображений или обозначений составные части изделия, действующие при помощи электрической энергии, и их взаимосвязи.
Источник

Демьян Бондарь
Эксперт по предмету «Автоматизация технологических процессов»
преподавательский стаж — 5 лет
Задать вопрос автору статьи
Структурная схема систем управления. Принципы управления
Определение 1
Структурная схема (автоматика) – это условное изображение, в котором отдельные составляющие систем изображаются прямоугольниками, а связи между ними линиями, показывающими направление передачи сигналов информации.
Пример структурной схемы системы управления напряжением генератора постоянного тока изображен на рисунке ниже.

Рисунок 1. Структурная схема. Автор24 — интернет-биржа студенческих работ
![]()
Сдай на права пока
учишься в ВУЗе
Вся теория в удобном приложении. Выбери инструктора и начни заниматься!
Получить скидку 3 000 ₽
При управлении реализуются два принципа:
- Управление по обратной связи или управление по отклонению.
- Управление по возмущению.
В случае управления по отклонению управляющим элементом изменяется управляющее воздействие при отклонении управляемой координаты от установленного значения, вне зависимости от причин, которые вызвали это отклонение. Система, которая строится по такому принципу является замкнутой. Пример структурной схемы замкнутой системы управления изображен на рисунке ниже.

Рисунок 2. Структурная схема замкнутой системы управления. Автор24 — интернет-биржа студенческих работ
Здесь: Х – регулирующее воздействие; Z – возмущающее воздействие; Y – управляемая координата; 1 – объект управления; 2 – управляющий элемент.
«Структурная схема систем управления» 👇
В случае управления по возмущению управляющее воздействие вырабатывается управляющим устройством в зависимости от величины возмущения. Системы управления по возмущению являются разомкнутыми, потому что в них отсутствует обратная связь. Пример структурной схемы системы управления, в которой реализован принцип управления по возмущению, изображен на рисунке ниже.

Рисунок 3. Структурная схема системы управления. Автор24 — интернет-биржа студенческих работ
Здесь: Х – регулирующее воздействие; Z – возмущающее воздействие; Y – управляемая координата; 1 – управляющий элемент; 2 – объект управления
Управление по возмущению возможно в том случае, когда возмущающее воздействие можно измерить. В основе данного принципа управления содержится компенсация возмущающего воздействия, что обеспечивает независимость управляемой координаты от возмущающего воздействия. Системы, которые построены по принципу компенсации возмущений, не могут компенсировать все возможные возмущения в объекте управления, потому что все измерить невозможно. Системы управления, которые строятся по принципу обратной связи, такого недостатка не имеют, потому что в этом случае управляющее устройство стремится компенсировать отклонения значения управляемой величины от установленного, вне зависимости от причин его возникновения. В таких системах трудно выполнять условия устойчивости, точности и высокого быстродействия одновременно. Самыми эффективными системами управления являются комбинированные, который сочетаются оба принципа управления. В данных системах самое сильное возмущение компенсируется специальным управляющим устройством. Устранение отклонения осуществляется при помощи контура управления с обратной связью. Пример структурной схемы комбинированной системы управления изображен на рисунке ниже.

Рисунок 4. Структурная схема комбинированной системы управления. Автор24 — интернет-биржа студенческих работ
Здесь: Х – регулирующее воздействие; Z – возмущающее воздействие; Y – управляемая координата; 1 – управляющее устройство 1; 2 – объект управления; 3 – управляющее устройств 2.
В зависимости от способа формирования сигнала задания (Y зад) различают три типа комбинированных систем управления:
- Системы стабилизации, где Y = const.
- Системы программного управления, где задание регулятору изменяется по заданной программе.
- Следящие системы, в которых задание управляющего устройства изменяется в зависимости от какого-либо параметра, то есть система следит за его изменением.
Математическое описание элементов системы управления
Математическое описание элемента системы управления составляется в следующей последовательности:
- Принимаются определенные допущения.
- Выбираются входные и выходные переменные.
- Выбирается система отсчета для каждой переменной.
- Применяется физический принцип, который отражает в математической форме закономерности преобразования вещества или энергии.
Самой распространенной формой описания свойств систем управления и их составляющих являются обыкновенные дифференциальные уравнения. По математическому описанию системы управления делятся на линейные, которые описываются линейными уравнениями и нелинейные, которые описываются нелинейными дифференциальными уравнениями. В такой системе закон управления представляет собой нелинейную функцию.
Находи статьи и создавай свой список литературы по ГОСТу
Поиск по теме
|
Тема |
8 |
|
Схемы структурные определяют основные функциональные части изделия, их назначение и взаимосвязи и служат для общего ознакомления с изделием. На структурной схеме раскрывается не принцип работы отдельных функциональных частей изделия, а только взаимодействие между ними. Поэтому составные части изделия изображают упрощенно в виде прямоугольников произвольной формы.
Допускается применять условные графические обозначения.
1. Структура систем управления
При разработке проекта автоматизации в первую очередь необходимо решить, с каких мест те или иные участки объекта будут управляться, где будут размещаться пункты управления, операторские помещения, какова должна быть взаимосвязь между ними, т. е. необходимо решить вопросы выбора структуры управления. Под структурой управления понимается совокупность частей автоматической системы, на которые она может быть разделена по определенному признаку, а также пути передачи воздействий между ними. Графическое изображение структуры управления называется структурной схемой. Хотя исходные данные для выбора структуры управления и ее иерархии с той или иной степенью детализации оговариваются заказчиком при выдаче задания на проектирование, полная структура управления должна разрабатываться проектной организацией.
Выбор структуры управления объектом автоматизации оказывает существенное влияние на эффективность его работы, снижение относительной стоимости системы управления, ее надежности, ремонтоспособности и т.д.
В самом общем виде структурная схема системы автоматизации представлена на рис. 8.1. Система автоматизации состоит из объекта автоматизации и системы управления этим объектом. Благодаря определенному взаимодействию между объектом автоматизации и системой управления система автоматизации в целом обеспечивает требуемый результат функционирования объекта, характеризующийся параметрами х1, х2, …, хn.
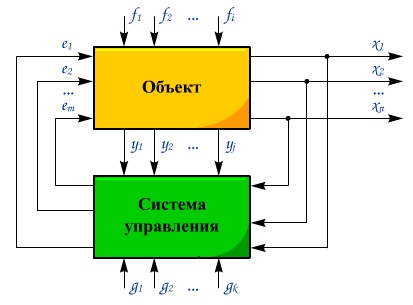
Рис. 8.1. Структурная схема системы автоматизации
К этим параметрам можно отнести, например, величины, характеризующие целесообразный конечный продукт технологического процесса, отдельные параметры, определяющие ход технологического процесса, его экономичность, обеспечение безаварийного режима и т.д.
Кроме этих основных параметров, работа комплексного объекта автоматизации характеризуется рядом вспомогательных параметров y1, y2,… yi, которые также должны контролироваться и регулироваться (например, поддерживаться постоянными). К такого рода параметрам можно отнести, например, величины, характеризующие работу установок подготовки технологического пара, насосных станций оборотного водоснабжения и т. д.
От этих установок требуется только подача на вход технологической установки сырья и энергоносителей с заданными параметрами. При этом необходимая дозировка подачи сырья и энергоносителей осуществляется средствами управления, относящимися к технологической установке.
В процессе работы на объект поступают возмущающие воздействия f1, f2,… fi, вызывающие отклонения параметров x1, х2, …, хn от их требуемых значений. Информация о текущих значениях x1, х2,…, хn, у1, у2, …, yi поступает в систему управления и сравнивается с предписанными им значениями g1, g2,…, gk, в результате чего система управления вырабатывает управляющие воздействия E1, E2,…, Em для компенсации отклонений выходных параметров.
Таким образом, объект автоматизации в общем случае состоит из нескольких в большей или меньшей степени связанных друг с другом участков управления. Участки управления физически могут представляться в виде
отдельных установок, агрегатов и т. д. или в виде локальных каналов управления отдельными параметрами одних и тех же установок, агрегатов и т. д.
В свою очередь, система управления в зависимости от важности регулируемых параметров, круга работников эксплуатационного персонала, которым необходимо знать их значения для осуществления оптимального управления объектом, в общем случае должна обеспечивать разные уровни управления объектом автоматизации, т. е. должна состоять из нескольких пунктов управления, в той или иной степени взаимосвязанных друг с другом.
С учетом изложенного структуры управления объектом автоматизации могут быть в частных случаях одноуровневыми централизованными, одноуровневыми децентрализованными и многоуровневыми. Одноуровневые системы управления, в которых управление объектом осуществляется с одного пункта управления, называются централизованными. Одноуровневые системы, в которых отдельные части сложного объекта управляются из самостоятельных пунктов управления, называются децентрализованными.
Структурные схемы одноуровневых централизованных и децентрализованных систем приведены на рис.8.2, на котором стрелками показаны только основные потоки передачи информации от объекта управления к системе управления и управляющие воздействия системы на объект управления. На рис.8.2 отдельные части сложного объекта управления, управляемые соответственно с пунктов ПУ1 – ПУ3, разделены штриховыми линиями.
Одноуровневые централизованные системы применяются в основном для управления относительно несложными объектами или объектами, расположенными на небольшой территории. Большинство промышленных объектов в настоящее время представляет собой сложные комплексы, отдельные части которых расположены на значительном расстоянии друг от друга.
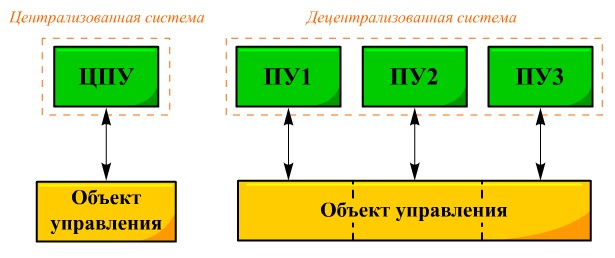
Рис. 8.2. Примеры одноуровневых систем управления
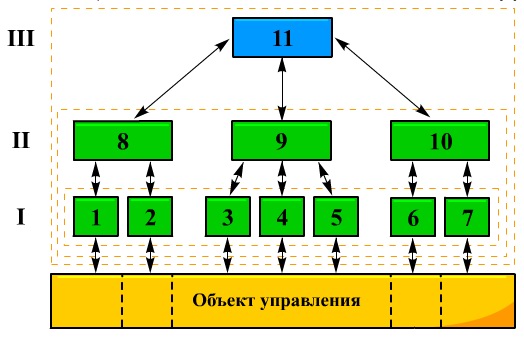
Рис. 8.3. Пример трехуровневой системы управления:
I – III – уровни управления
Кроме основных технологических установок, объекты имеют большое число вспомогательных установок-подобъектов (промышленные котельные, компрессорные, насосные станции оборотного водоснабжения, котлы-утилизаторы, очистные сооружения и т.п.), которые необходимы для обеспечения технологических установок всеми видами энергии, а также для утилизации и нейтрализации остаточных продуктов технологического процесса.
Если управление такого комплексного объекта построить по одноуровневой централизованной системе, то намного усложнятся коммуникации системы управления, резко возрастут затраты на ее сооружения и эксплуатацию, центральный пункт управления получится громоздким. Переработка информации, большая часть которой является ненужной для непосредственного ведения технологического процесса, представляет большие затруднения. Удаленность пункта управления от того или иного вспомогательного подобъекта затрудняет принятие оперативных мер по устранению тех или иных неполадок. В этом случае более приемлемой становится одноуровневая децентрализованная система управления.
Однако с помощью одноуровневых систем не всегда представляется возможным оптимально решить вопросы управления технологическими процессами. Это в первую очередь относится к сложным технологическим процессам. Тогда целесообразно переходить к многоуровневым системам управления. В качестве примера на рис.8.3 представлена трехуровневая система управления сложным объектом с разветвленными технологическими связями между установками. Отдельные технологические установки управляются децентрализованно с пунктов управления 1 – 7. Это первый уровень управления. С пунктов 1 – 7 соответственно управляются объекты, имеющие существенную технологическую взаимосвязь. В связи с этим наиболее ответственные регулируемые параметры установок передаются на пункты управления 8 – 10 второго уровня управления. Основные параметры, определяющие технологический процесс объекта в целом, могут управляться и контролироваться с пункта управления 11 третьего уровня.
Для первого уровня при проектировании целесообразно предусматривать три режима управления:
- командами, поступающими от уровня более высокого ранга;
- командами, формирующимися непосредственно на первом уровне;
- командами, поступающими как с уровня более высокого ранга, так и формирующимися непосредственно на первом уровне.
Для уровня второго ранга и выше возможны четыре режима работы:
- аппаратура данного i-го ранга принимает и реализует в управляющие воздействия команды (i + 1)-го ранга;
- команды формируются непосредственно на аппаратуре i-го ранга;
- все функции управления с i-го ранга передаются на аппаратуру (i – 1)-го ранга;
- часть команд на аппаратуру i-го ранга поступает с (i + 1)-го ранга, часть команд формируется на i-м ранге, часть функций управления передана на аппаратуру (i- 1)-го ранга.
Аппаратура i-го ранга соответственно должна иметь переключатели режимов на три положения с четкой сигнализацией положений.
Перевод аппаратуры с режима 1 на режим 2 осуществляется по команде или с разрешения оператора системы вышестоящего ранга.
Передача функций управления тем или иным параметром на нижестоящий ранг осуществляется только после приема команды о передаче и подтверждения оператора системы нижестоящего ранга о готовности к принятию на себя тех или иных функций управления (формирования команд).
Многоуровневая структура системы управления обеспечивает ее надежность, оперативность, ремонтопригодность. При этом легко решается оптимальный уровень централизации управления с минимальным количеством средств технологического контроля, управления и линий связи между ними.
АСУ ТП классифицируются на уровни классов 1, 2 и 3. К классу 1 (АСУ ТП нижнего уровня) относятся АСУ ТП, управляющие агрегатами, установками, участками производства, не имеющие в своем составе других АСУ ТП. К классу 2 (АСУ ТП верхнего уровня) относятся АСУ ТП, управляющие группами установок, цехами, производствами, в которых отдельные агрегаты (установки) имеют свои локальные системы управления, не оснащенные АСУ ТП класса 1. К классу 3 (АСУ ТП многоуровневые) относятся АСУ ТП, объединяющие в своем составе АСУ ТП классов 1, 2 и реализующие согласованное управление отдельными технологическими установками или их совокупностью (цехом, производством).
Построение систем автоматизации по уровням управления определяется как требованиями снижения трудозатрат на их реализацию, так и целями (критериями) управления технологическими объектами.
Система автоматизации структурно может быть представлена по-разному.
В общем случае любая система может быть представлена конструктивной, функциональной или алгоритмической структурой. В конструктивной структуре системы каждая ее часть представляет собой самостоятельное конструктивное целое. Примерами изображения конструктивных структурных схем системы автоматизации могут служить рис.8.1 – 8.3.
В функциональной структуре каждая часть предназначена для выполнения определенной функции, в алгоритмической – для выполнения определенного алгоритма преобразования входной величины, являющегося частью алгоритма функционирования системы в целом.
В проектах автоматизации изображают конструктивные структурные схемы с элементами функциональных признаков.
Полные сведения о функциональной структуре с указанием локальных контуров регулирования, каналов управления и технологического контроля приводятся в функциональных схемах.
Алгоритмические структурные схемы по контурам регулирования крайне необходимы при производстве наладочных работ систем автоматизации.
2. Выполнение структурных схем автоматизации (схем функциональной структуры)
Структурные схемы автоматизации в проектах автоматизации рекомендуется разрабатывать в соответствии с ГОСТ 24.302-80. Система технической документации на АСУ. Общие требования к выполнению схем (п. 2.1, 2.2, 2.6).
Графическое построение схемы должно давать наиболее наглядное представление о последовательности взаимодействия функциональных частей в изделии. На линиях взаимодействия рекомендуется стрелками (по ГОСТ 2.721-74) обозначать направления хода процессов, происходящих в изделии.
На структурной схеме отображаются в общем виде основные решения проекта по функциональной, организационной и технической структурам автоматизированной системы управления технологическими процессами (АСУ ТП) с соблюдением иерархии системы и взаимосвязей между пунктами контроля и управления, оперативным персоналом и технологическим объектом управления. Принятые при выполнении структурной схемы принципы организации оперативного управления технологическим объектом, состав и обозначения отдельных элементов структурной схемы должны сохраняться во всех проектных документах на АСУ ТП, в которых они конкретизируются и детализируются в функциональных схемах автоматизации, структурной схеме комплекса технических средств (КТС) системы, принципиальных схемах контроля и управления, а также в проектных документах, касающихся организации оперативной связи и организационного обеспечения АСУ ТП.
Исходными материалами для разработки структурных схем являются:
- задание на проектирование АСУ ТП;
- принципиальные технологические схемы основного и вспомогательного производств технологического объекта;
- задание на проектирование оперативной связи подразделений автоматизируемого технологического объекта;
- генплан и титульный список технологического объекта.
Структурная схема разрабатывается на стадиях «проект» и «рабочий проект». На стадии «рабочая документация» при двух – стадийном проектировании структурная схема разрабатывается только в случае изменений технологической части проекта или решений по АСУ ТП, принятых при утверждении проекта автоматизации.
В качестве примера на рис. 8.4 приведена структурная схема управления сернокислотным производством.
На структурной схеме показывают:
- технологические подразделения автоматизируемого объекта (отделения, участки, цехи, производства);
- пункты контроля и управления (местные щиты, операторские и диспетчерские пункты и т.п.), в том числе не входящие в состав разрабатываемого проекта, но имеющие связь с проектируемыми системами контроля и управления;
- технологический (эксплуатационный) персонал и специализированные службы, обеспечивающие оперативное управление и нормальное функционирование технологического объекта;
- основные функции и технические средства (устройства), обеспечивающие их реализацию в каждом пункте контроля и управления;
- взаимосвязь подразделений технологического объекта, пунктов контроля и управления и технологического персонала между собой и с вышестоящей системой управления (АСУ).
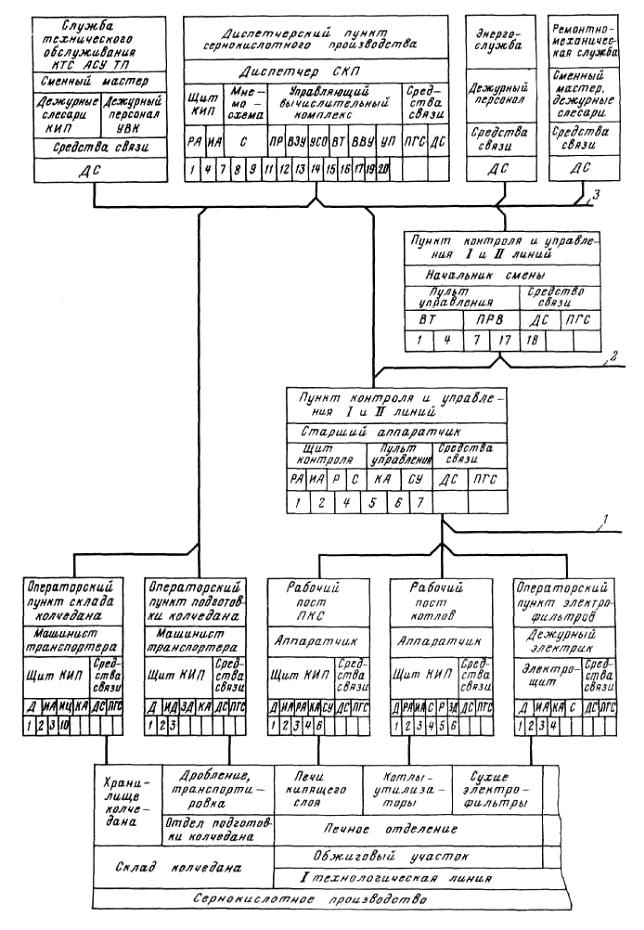
Рис. 8.4. Фрагмент структурной схемы управления и контроля сернокислотным производством:1-линия
связи с цеховой химической лабораторией; 2 – линия связи с пунктами контроля
и управления кислотным участком; 3 – линия связи с пунктом контроля и управления
III и IV технологическими линиями
Функция АСУ ТП и их условные обозначения
на рис. 8.4
Таблица 8.1
|
Условное |
Наименование |
|
1 |
Контроль параметров |
| 2 | Дистанционное управление технологическим оборудованием и исполнительными устройствами |
|
3 |
Измерительное преобразование |
| 4 | Контроль и сигнализация состояния оборудования и отклонения параметров |
|
5 |
Стабилизирующее регулирование |
|
6 |
Выбор режима работы регуляторов и ручное управление задатчиками |
|
7 |
Ручной ввод данных |
|
8 |
Регистрация параметров |
|
9 |
Расчет технико-экономических показателей |
|
10 |
Учет производства и составления данных за смену |
|
11 |
Диагностика технологических линий (агрегатов) |
|
12 |
Распределение нагрузок технологических линий (агрегатов) |
|
13 |
Оптимизация отдельных технологических процессов |
|
14 |
Анализ состояния технологического процесса |
|
15 |
Прогнозирование основных показателей производства |
|
16 |
Оценка работы смены |
|
17 |
Контроль выполнения плановых заданий |
|
18 |
Контроль проведения ремонтов |
|
19 |
Подготовка и выдача оперативной информации в АСУП |
|
20 |
Получение производственных ограничений и заданий от АСУП |
Элементы структурной схемы изображаются, как правило, в виде прямоугольников. Отдельные функциональные службы [отдел главного энергетика (ОГЭ), отдел главного механика (ОГМ), отдел технического контроля (ОТК) и т.п.] и должностные лица (директор, главный инженер, начальник цеха, начальник смены, мастер и т. п. ) допускается изображать на структурной схеме в виде кружков.
Внутри прямоугольников, изображающих участки (подразделения) автоматизируемого объекта, раскрывается их производственная структура. При этом выделяются цехи, участки, технологические линии либо группы агрегатов для выполнения законченного этапа технологического процесса, которые являются существенными для раскрытия в документах проекта всех взаимосвязей между управляемой (технологическим объектом управления) и управляющей системами.
На схеме функции АСУ ТП могут указываться в виде условных обозначений, расшифровка которых дается в таблице на поле чертежа (табл.8.1).
Наименование элементов производственной структуры должны соответствовать технологической части проекта и наименованиям, используемым при выполнении других документов проекта АСУ ТП.
Взаимосвязь между пунктами контроля и управления, технологическим персоналом и объектом управления изображается на схеме сплошными линиями. Слияние и разветвление линий показываются на чертеже линиями с изломом (рис.8.4).
При наличии аналогичных технологических объектов (цехов, отделений, участков и т. д.) допускается раскрывать на схеме структуру управления только для одного объекта. Об этом на схеме даются необходимые пояснения.
Из структурной схемы на рис.8.4 следует, что система управления основными технологическими процессами сернокислотного производства четырехуровневая:
- первый уровень – местное управление агрегатами осуществляемое аппаратчиками с рабочих постов;
- второй уровень – централизованное управление несколькими агрегатами, входящими в тот или иной технологический участок, осуществляемое старшим аппаратчиком;
- третий уровень – централизованное управление несколькими участками, входящими в I и II (или III и IV) технологические линии сернокислотного производства;
- четвертый уровень – управление с диспетчерского пункта всеми технологическими линиями сернокислотного производства, осуществляемое диспетчером.
Структурные схемы выполняются, как правило, на одном листе. Таблица с условными обозначениями (табл.8.1) располагается на поле чертежа схемы над основной надписью. Таблица заполняется сверху вниз. При большом числе условных обозначений продолжение таблицы помещают слева от основной надписи с тем же порядком заполнения. Основную надпись и дополнительные графы к ней выполняют согласно ГОСТ 21.103-78.
Толщину линий на схеме выбирают в соответствии с ГОСТ 2.303-68. Рекомендуется использовать для условных изображений линии толщиной 0, 5 мм; для линий связи – 1 мм; для остальных линий – 0, 2 – 0, 3 мм.
Размеры цифр и букв для надписей выбирают в соответствии с ГОСТ 2.304-81. Пояснительный текст следует выполнять в соответствии с ГОСТ 2.316-68. Текстовую часть, помещенную на поле чертежа, располагают над основной надписью. Между текстовой и основной надписями не допускается помещать изображения, таблицы и т.п. Пункты пояснительного текста должны иметь сквозную нумерацию. Каждый пункт записывают с красной строки. Заголовок «Примечание» не пишут. В тексте и надписях не допускаются сокращения слов, за исключением общепринятых, а также установленных приложениями к ГОСТ 2.316-68 и ГОСТ 2.105-95.
Размеры всех условных изображений не регламентируются и выбираются по усмотрению исполнителя с соблюдением одинаковых размеров для однотипных изображений.
В настоящее время для технологического контроля и автоматического управления широкое применение находят агрегатированные системы средств телемеханики, комплексы технических средств локальных измерительных и управляющих систем, агрегатированные системы контроля и регулирования, электрические централизованные и др.
Агрегатированные комплексы выполняются, как правило, на элементах микроэлектронной техники, имеют развитую и гибкую систему связей между входящими в нее устройствами, а также с объектом управления и обслуживающим персоналом, обеспечивающую достаточно широкие возможности их использования в различных вариантах компоновки и режимах работы.
Персональные ЭВМ и сети ПЭВМ находят широкое применение для компоновки различных структур АСУ ТП в энергетической, химической, нефтехимической, нефтеперерабатывающей, газовой, металлургической, металлообрабатывающей, горнорудной, приборостроительной, целлюлозно-бумажной и других отраслях промышленности.
Они позволяют реализовать следующие информационно-вычислительные функции АСУ ТП:
- сбор, первичную обработку и хранение информации;
- косвенные измерения параметров процесса и состояния технологического оборудования;
- сигнализацию состояния параметров технологического процесса и оборудования;
- расчет технико-экономических и эксплуатационных показателей технологического процесса и технологического оборудования;
- подготовку информации для вышестоящих и смежных систем и уровней управления;
- регистрацию параметров технологического процесса, состояний оборудования и результатов расчета;
- контроль и регистрацию отклонений параметров процесса и состояния оборудования от заданных;
- анализ срабатывания блокировок и защит технологического оборудования;
- диагностику и прогнозирование хода технологического процесса и состояния технологического оборудования;
- оперативное отображение информации и рекомендаций ведения технологического процесса и управления технологическим оборудованием;
- выполнение процедур автоматического обмена информацией с вышестоящими и смежными системами управления.
На базе промышленных УЭВМ реализуются управляющие вычислительные комплексы (УВК), выполняющие различные функции, в том числе:
- регулирование отдельных параметров технологического процесса;
- однотактное логическое управление;
- каскадное регулирование;
- многосвязанное регулирование;
- программные и логические операции дискретного управления процессом и оборудованием;
- оптимальное управление установившимся режимом технологического процесса и работы оборудования;
- оптимальное управление переходным процессом;
- оптимальное управление технологическим объектом в целом.
В проекте автоматизации необходимо произвести выбор и компоновку агрегатированных комплексов технических средств и средств автоматизации, т.е. на базе типовых технических средств разработать структурную схему технологического контроля и управления определенными параметрами данного объекта автоматизации.
На структурной схеме агрегатированные и модульные элементы комплекса технических средств и средств автоматизации изображают в виде прямоугольников с указанием в них условных обозначений. Расшифровка этих обозначений с указанием их функций производится в таблице, помещенной на чертеже схемы. Связь между элементами схемы изображается линиями со стрелками, показывающими направление прохождения сигналов.
В качестве примера на рис.8.5 приведена упрощенная структурная схема технического обеспечения АСУ ТП доменной печи № 9 Криворожского металлургического завода, построенная с использованием средств УВК. Доменная печь имеет конвейерную систему подачи материалов на колошник. Сбор информации о работе доменной печи, конвейерной системы, шихтоподачи и других систем осуществляется датчиками уровня ДУ в шихтовых и датчиками вида материала ДВМ в промежуточных бункерах, сигнализаторами С наличия и вида материалов на конвейерах переполнения течек и промежуточных воронок, датчиками давления и перепада давления ДДПД в отдельных полостях загрузочного устройства, датчиками угла поворота ДУП лотка загрузочного устройства, датчиками температуры ДТ, датчиками расхода ДР и т. п.
Обработка и предоставление информации, стабилизация или изменение по заданной программе технологических параметров, ввод информации в УВМ и вывод рекомендаций по управлению ходом доменной печи и другие операции осуществляются с помощью технических средств централизованного контроля и управления работой доменной печи.
При разработке проектов автоматизации сложных технологических процессов с использованием агрегатированных комплексов вычислительной техники, требующих предварительного проведения научно-исследовательских экспериментальных работ в условиях действующего оборудования в период освоения проектных мощностей, следует предусматривать поэтапное выполнение монтажных работ и включение УВК в работу.
В общем случае можно рекомендовать следующее поэтапное включение УВК в работу:
1) пуск объекта с технологическим контролем и автоматическим управлением от локальных систем регулирования; в этот период уточняются динамические и статические характеристики объекта, устраняются ошибки монтажа и проекта, возможные дефекты технологического оборудования, стабилизируется технологический процесс и т. п.; отрабатываются программы и алгоритмы на УВМ без их подключения к действующему технологическому оборудованию;
2) подключение УВМ к действующему технологическому оборудованию и включение ее в режим «советчика» с выдачей эксплуатационному персоналу рекомендаций по управлению ходом доменной печи;
3) включение УВМ в режим автоматического управления объектом через системы локального регулирования.
При необходимости в проектах автоматизации приводятся структурные схемы отдельных комплексов технических средств и средств автоматизации.
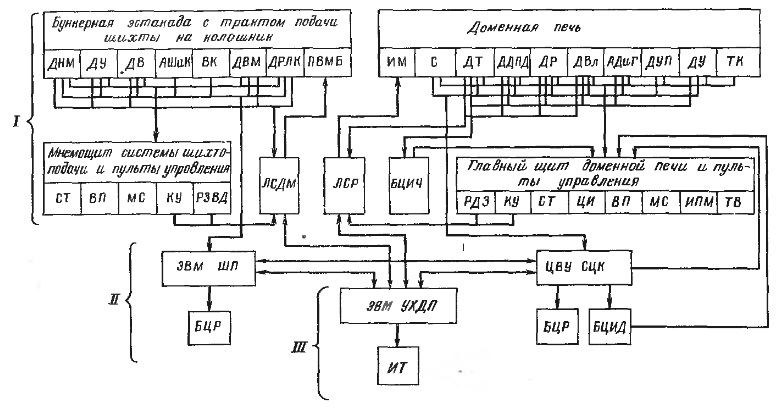
Рис. 8.5. Упрощенная структурная схема АСУ ТП
доменной печи № 9 Криворожского металлургического завода
ДНМ – датчики наличия материалов; ДУ – датчики уровня; ДВ – датчики массы; АШиК – анализаторы шихты и кокса; ВК – влагомер кокса; ДВМ – датчики вида материалов; ДРЛК – датчики разрыва лент конвейеров; ПВМБ – питатели для выдачи материалов из бункеров; ИМ – исполнительные механизмы; ДТ – датчики температуры; ДДПД – датчики давления или перепада давлений; ДР – датчики расхода; ДВл – датчики влажности; АДиГ – анализаторы дутья и газа; ДУП- датчики угла поворота; ТК – телекамеры; СТ – сигнальное табло; ВП – вторичные приборы; МС – мнемосхемы; КУ – ключи управления; РЗВД – ручные задатчики массы дозы; ЛСДМ – локальные системы дозирования материалов; ЛСР – локальные системы регулирования; БЦИЧ – блок цифровой индикации с частотными вводами; РДЗ – ручные дистанционные задатчики; ЦИ – цифровые индикаторы; ИПМ-индикаторы положения механизмов; ТВ – телевизоры; ЭВМ ШП – электронная вычислительная машина шихтоподачи (управляющая взвешиванием материалов и производительностью тракта ШП); ЦВУ СЦК – цифровое вычислительное устройство системы централизованного контроля (осуществляющее сбор и обработку первичной информации, расчет комплексных и удельных показателей работы печи, автоматическое заполнение отчетных документов); БЦР – блок цифровой регистрации; БЦИД- блок цифровой индикации с дискретными вводами; ЭВМ УХДП – электронная вычислительная машина, управляющая тепловым состоянием и ходом печи; ИТ – информационные табло; I – первый этап внедрения (пусковой комплекс); II и III-соответственно второй и третий этапы внедрения.
