Структурная
схема станка с автоматическим управлением
представляет собой упрощенное изображение
кинематической схемы и системы управления.
На ней должны быть представлены
кинематические группы, необходимые для
осуществления рассмотренных переходов
обработки. Особенностью такой структуры
является возможность реализации простых
и сложных исполнительных движений.
При этом механические
связи (зубчатые и ременные передачи)
указываются одинарными пунктирными
линиями, а немеханические связи
(электрические, оптические и др.) –
двойными. На схеме показываются все
датчики, управляющие и информационные
связи. Датчики могут использоваться
для контроля параметров движений или
показателей качества деталей, диагностики
и управления приводами станка.
Для
решения практических задач целесообразно
параллельно проводить также анализ
другой современной модели аналогичного
типоразмера, сравнивая между собой
основные отличия станков.
При анализе
структуры применительно к рассматриваемому
переходу обработки для каждой
кинематической группы определяются
внутренние и внешние структурные связи,
которые должны включать необходимую
совокупность механических и немеханических
связей.
Следует
выявить элементы связей, обеспечивающих
требуемые параметры исполнительных
движений для изготовления заданной
детали (или ее поверхности) Каждое
исполнительное движение характеризуется
параметрами пространства (координаты
исходной и конечных точек, направление,
скорость, траектория, длина пути) и
времени (момент начала и характер
движения в смысле его непрерывности).
Особое
внимание следует обратить на структурные
связи, определяющие показатели точности
формы и размеров обработанной детали.
Нужно установить факторы механических
связей, оказывающие влияние на эти
показатели.
При
последующем анализе конструкции станка
может анализироваться баланс отклонений
параметров движений, обусловленных
данными факторами.
4. Методика расчета настройки станков
Кинематическая
настройка станков с ЧПУ для выполнения
перехода обработки, как правило,
осуществляется в автоматическом режиме
с помощью системы управления с учетом
заранее составленной программы.
Расчет
кинематической настройки [1] предусматривает
определение параметров органов станка,
обеспечивающих необходимые исполнительные
движения. Для этого рекомендуется
использование приведенной ниже методики,
позволяющей определить формулы настройки
кинематических цепей и выявить особенности
их расчета.
4.1 Определение исходных данных и их приведение
к
виду, возможному для настройки
К исходным
данным относятся элементы режима резания
для переходов обработки [7], конструктивные
параметры заготовки, детали и инструмента,
необходимые для расчета настройки
станка.
При выводе
формул настройки учитываются требуемые
параметры исполнительных движений и
их размерности. В случае необходимости
сложного исполнительного движения
следует уточнить настраиваемый параметр,
определяющий его траекторию.
При
обработке фасонных поверхностей
возникает необходимость обеспечения
определенной и направленной по касательной
к обрабатываемой поверхности результирующей
подачи, которая реализуется за счет
составляющих движений. При этом нужно
выразить функциональные зависимости
подач этих движений от требуемого
контура детали.
Рекомендуется
составить схему цикла относительных
перемещений инструмента и детали (см.
п. 5), которая позволяет установить
необходимые рабочие и наладочные
движения и их последовательность.
На
этом этапе скорость резания приводится
к частоте вращения детали или инструмента,
а подача – к виду возможному для настройки.
Если на станке предусмотрено ступенчатое
регулирование частот вращения шпинделя
и подач, указывается необходимость
определения их ближайших меньших
значений с учетом значений, обеспечиваемых
станком.
Соседние файлы в папке МРС для студентов
- #
- #
- #
- #
- #
Автоматизированные станки и агрегаты с приводом рабочих органов ходовыми винтами можно распределить в зависимости от движения винта и гайки на три группы:
- вращается гайка при неподвижно закрепленном винте;
- вращается винт при неподвижно закрепленной гайке;
- вращаются и винт, и гайка.
Примером устройств первой группы может служить резьбонарезная силовая головка (рис. 1). Цикл движений головки простой: рабочий ход вперед – обратный ход (вывод метчиков) с повышенной скоростью при двухскоростном электродвигателе главного привода. Привод подач кинематически жестко связан с приводом шпинделя. Головка работает по полуавтоматическому циклу, которым управляют кулачки, закрепленные на корпусе головки и действующие на переключатели, расположенные в коробке 7.

Рис. 1. Резьбонарезная силовая головка с подачей по винту вращающейся гайкой. Настройка подач шестернями 1-2 и 3-4 (сменные); 5 – предохранительная муфта; 6 – коробка с переключателями; 7 – упорный предохранительный болт; 8 – насос для смазки; 9 – кулачок; 10 – уплотнение; 11 – срезной предохранительный штифт
Схема привода в направляющей плите
При большой длине быстрого подвода и отвода силовой головки с плоским кулачком применяются направляющие плиты с независимым приводом ходового винта (рис. 2).
В конце быстрого подвода силовой головки один из ее командных кулачков-упоров действует на конечный выключатель, выключающий электродвигатель 1 и параллельно с ним электромагнит 7. Пружина 9 включает кулачковую муфту 4, сцепляя привод винта с барабаном колодочного тормоза 3, тормозной момент которого значительно выше момента тормозной фрикционной муфты 2. Винт останавливается тотчас же по включении кулачковой муфты 4, а электродвигатель 1 затормаживается фрикционной тормозной муфтой через некоторое время, не вызывая перебега головки 5 при выбеге ротора.

Рис. 2. Схема привода в направляющей плите: 1 – электродвигатель направляющей плиты; 2 – тормозная муфта; 3 – колодочный тормоз; 4 – кулачковая муфта для включения тормоза: 5 – силовая головка с плоским кулачком; 6 – направляющая плита; 7 – электромагнит, выключающий кулачковую муфту; 8 – профиль зубьев муфты 4; 9 – пружина, включающая кулачковую муфту 4 тормоза
Токарный многорезцовый полуавтомат модели 1730 (рис. 3) в отношении вращения винта и гайки является переходной конструкцией. Полуавтоматический рабочий цикл совершается при неподвижной гайке, а ручное перемещение суппортов при наладочном цикле – вращением гайки. Это отразилось на конструкции гайки и привода ее вращения, но кинематическая схема построена так же, как для неподвижной гайки.уфты.

Рис. 3. Кинематическая схема токарного многорезцового полуавтомата модели 1730
Поперечный суппорт приводится от продольного (рис. 4) и работает параллельно с ним. Цикл движений суппортов не сложен. Отскок резцов после рабочего хода и взвод их после отвода производится кулачковой линейкой (см. рис. 7).

Рис. 4. Структурная схема станка модели 1730: Э1 – главный электродвигатель; Э2 – электродвигатель быстрого (ускоренного) хода; Ш – шпиндель; Н1 – наладочная настройка привода шпинделя; Н2 – наладочная настройка привода подач; Н3 – наладочная настройка подач поперечного суппорта; 1 – продольный суппорт; 2 – поперечный суппорт; 3 – реечные передачи к командоаппарату К; С – сопряжение цепей быстрого (ускоренного) и рабочего ходов суппортов в односторонней реверсивной муфте обгона; М – муфта для включения привода подач
Цикловая настройка привода суппортов Кц производится переключением электродвигателя ускоренного хода Э2 и муфты М (рис. 4) при наличии реверсивной односторонней муфты обгона C (см. рис. 5). Выключение и включение главного электродвигателя связаны со съемом детали и установкой следующей заготовки.
Командоаппарат конструктивно связан с коробкой подач (рис. 5), соединенной с цепью привода рабочих подач предохранительной зубчатой муфтой 1. Зубчатая муфта 2 включает цепь рабочей подачи при подъеме рукояткой 12 люльки 3, сидящей на валу 13. Реверсивная муфта обгона служит для сопряжения цепей рабочей подачи и ускоренного хода от реверсивного электродвигателя.
Рейка 7, закрепленная на продольном суппорте, вращает через зубчатое колесо вал 8, передающий через втулочную муфту 9 движение коробке передач поперечного суппорта. На другом конце вала 8 сидит колесо 6, передающее движение рейке командоаппарата, несущей командные кулачки (упоры).
Люлька 3 удерживается в поднятом положении фиксатором 5. Фиксатор может быть выведен из гнезда 4 при повороте вниз рукоятки 12 около оси люльки или при повороте около той же оси рычага люльки 10 с винтом-упором при воздействии одного из командных кулачков на ролик 11, смонтированный на корпусе рычага.

Рис. 5. Коробка подач токарного многорезцового полуавтомата 1730
Продольный суппорт полуавтомата (рис. 6) снабжен копирной линейкой 6 со скосом, по которому производится косой поперечный отвод суппорта при обратном ускоренном отводе и косое врезание на глубину до 10 мм после окончания ускоренного продольного подвода.

Рис. 6. Передний суппорт полуавтомата модели 1730: 1 – винт для установки салазок; 2 – гайка; 3 – поперечные салазки; 4 – каретка; 5 – ролик; 6 – копирная линейка; 7 – пружина; 8 – рейка со скосами, подвижная в поперечном направлении; 9 – рейка со скосами, подвижная в продольном направлении; 10 – упор; 11 – обойма; 12 – крестовина; 13 – втулка; 14 – ролики; 15 – коническое колесо; 16 – маховик
В конце рабочего хода механизм отскока (рис. 7) производит отвод резцов на 1 мм от заготовки, так как дойдя до левого упора 6, линейка 7 сдвинется вправо относительно линейки 3, кулачки одной линейки совместятся со впадинами другой и под действием пружины 7 (см. рис. 6) линейки 3 и 4 (рис. 7), ролик 2, его палец и поперечные салазки отойдут от заготовки. В конце обратного ускоренного отвода линейка 7 упрется в правый упор 6, произойдет «взвод» линеек в положение, показанное на рис. 7, линейка 4, ролик 2 и поперечные салазки сдвинутся вместе с резцами в сторону заготовки – произойдет «прискок» резцов.
Ручное перемещение переднего суппорта производится вращением гайки через зубчатую передачу от маховичка 16 (рис. 6). Втулка 13, сидящая на шпонке на валу маховичка, своими выступами прижимает ролики 14 к крестовине 12 двусторонней реверсивной муфты обгона. Крестовина 12 заклинена шпонкой на втулке конического колеса 15.
При работе по ходовому винту гайка затормаживается обгонной муфтой 12, два ролика 14 которой заклиниваются между крестовиной и неподвижной обоймой 11.

Рис. 7. Схема механизма «отскока»: 1 – каретка суппорта; 2 – палец с роликом, связанный с поперечными салазками, отжимаемыми пружиной; 3 – линейка со скошенными кулачками, подвижная в поперечном направлении: 4 – копирная – линейка, подвижная в поперечном направлении; 5 – кронштейн с поперечным направляющим сухарем для линейки; 6 – два упора линейки 7; 7 – линейка со скошенными кулачками, подвижная в продольном направлении; 8 – штифт, удерживающий линейку от продольного смещения
Полуавтоматический цикл станка
Исходное положение. Рейка 3 – в верхнем положении (рис. 8), люлька занимает положение Б. Кулачок 1 через рычаг 2 нажимает шток выключателя KB3, контакты 1α-2 (рис. 9) замкнуты, контакты 1-5 – разомкнуты. Кулачок 9 люльки (рис. 8) нажимает на шток выключателя КВ2, его контакты 6-7 (рис. 9) замкнуты, контакты 1-5 разомкнуты. Нормально открытый конечный выключатель КВ1, разомкнут.

Рис. 8. Командоаппарат токарного многорезцового полуавтомата модели 1730
Быстрый подвод суппортов. При подъеме люльки за рукоятку управления винт 8 (рис. 8) рычага 7 люльки нажимает на шток конечного выключателя KB1, а кулачок 9 люльки освобождает шток выключателя КВ2, его контакты 6-7 размыкаются, а контакты 1-5 замыкаются (рис. 9). Катушка контактора КБВ получает питание по цепи 1, 1α, 2, 3, 4, и контакты КБВ замыкаются, электродвигатель ДБ быстрых ходов включается на ход вперед. Одновременно срабатывает реле РП-1, затем РП-2, замыкаются контакты контактора КГ, включается главный электродвигатель ДГ, электродвигатель ДН насоса охлаждения и электромагнит ЭМТ, растормаживающий ленточный тормоз привода главного движения. Питание КБВ идет по линии 1 (РП-1), 5,5 (РП-2), 6, (РП-1), 2.
При подъеме люльки включается кулачковая муфта цепи привода рабочих подач, но благодаря муфте обгона суппортам передается движение быстрого подвода от электродвигателя быстрых ходов.
При подводе рейка з (рис. 8) с командными кулачками 1, 4 и 5 идет вниз. Кулачок 1 отходит от рычага 2, размыкаются контакты 1а, 2 выключателя КВ3.

Рис. 9. Принципиальная электросхема полуавтомата модели 1730
Рабочая подача суппортов. Кулачок 5 (рис. 8), опускаясь и действуя передним скосом на ролик 6, поворачивает рычаг 7 с винтом 8 около оси люльки и отводит винт 8 от штока выключателя КВ1, в сторону; размыкаются контакты 2, 3 выключателя КВ1, (рис. 9), цепь катушки КБВ и РП-1 не получает тока, двигатель ДБ быстрых ходов останавливается, начинается рабочая подача. Катушка КГ получает ток по цепи 1 (КВ-2), 5 (РП-2), 9 и 1 (КВ-3), 5; 5; 5 (РП-2), 9.
Быстрый отвод. В конце рабочего хода кулачок 4 (рис. 8), действуя своим передним скосом на ролик 6, поворачивает рычаг 7 около оси люльки еще дальше и выводит фиксатор Люльки из гнезда (рис. 5); люлька падает, выключая муфту привода рабочих подач, а затем действует кулачком она штифт 10 (рис. 8) и через него – на шток выключателя KB, (рис. 9), замыкает контакты 6-7, вследствие чего срабатывает контактор КБH, который включает двигатель быстрых ходов на реверсирование для быстрого отвода суппортов в исходное положение.
В конце отвода кулачок 1, двигаясь с рейкой 3 вверх (рис. 8), поворачивает рычаг 2, который нажимает на шток выключателя КВ3, размыкает цепь питания катушки РП-2 и тем самым выключает питание катушек КГ и КБН. В результате этого выключаются главный двигатель, электродвигатель быстрых ходов, насос и электромагнит ленточного тормоза. Станок останавливается.
Схемы с вращением ходового винта и гайки (см. Устройство передачи ходовой винт-гайка) применяются в силовых головках (рис. 10). Рабочая подача производится вращением гайки с приводом от вала шпиндельной коробки через шариковую предохранительную муфту, проскальзывающую при работе на мертвый упор.

Рис. 10. Схема силовой головки с вращением гайки при рабочей подаче и винта – при быстрых (ускоренных) ходах
Быстрый (ускоренный) подвод и отвод силовой головки по направляющей плите производится ходовым винтом, который приводится от электродвигателя быстрых ходов через двустороннюю реверсивную муфту обгона, крестовина которой заклинена шпонкой на ходовом винте. При вращении винта его гайка тормозится червячной передачей. При вращении гайки два ролика муфты обгона заклиниваются между крестовиной и неподвижно закрепленной наружной обоймой муфты и затормаживают винт.
Головка работает по полуавтоматическому циклу. Управление – кулачками-упорами, которые закреплены на головке и действуют на переключатели, смонтированные на направляющей плите.
Для уменьшения выбега головки при быстром подводе двигатель ускоренных ходов оснащается электротормозом или реле времени при торможении противотоком.
Сопряжение цепей ускоренного хода и рабочей подачи производится при помощи муфт, самой пары винт-гайка (рис. 10), муфты обгона – как правило, реверсивной (в отличие от муфт обгона кулачковых автоматов и полуавтоматов). Вследствие постоянства шага ходового винта при включении цепи быстрого хода и ее реверсировании возникают значительные ускорения и большие силы инерции, если массы стола и обрабатываемых заготовок велики (продольно-фрезерные полуавтоматы). В таких случаях для сопряжения цепей ускоренного и рабочего ходов предпочитают применять эпициклические механизмы, более приспособленные к восприятию больших инерционных моментов, чем муфты обгона.
Минский завод автоматических линий и агрегатных станков (МЗАЛ) выпускал ранее самодействующие силовые головки с подачей ходовым винтом (рис. 11). От главного двигателя 1 через вал 2 и зубчатые колеса 4 и 5 движение передается валу 6, соединенному со шпиндельной коробкой. От вала 2 через червячную передачу 3 вращение сообщается валу 8, несущему электромагнитные муфты 7 и 9. При включении муфты 7 движение рабочей подачи передается валу 12 через сменные колеса e-f, а при включении муфты 9 – через сменные колеса с-d. Вал 12 через предохранительную муфту 10 и червячную передачу 11 вращает гильзу 14, в которой закреплена гайка 15 ходового винта 13.
При рабочей подаче, настраиваемой при наладке сменными колесами e-f и с-d, а во время цикла – переключением муфт 7 и 9, привод ходового винта заторможен электромагнитным тормозом 16, который используется также при выключении ускоренного хода головки. Ускоренный подвод и отвод головки производится от реверсивного электродвигателя 17, вращающего ходовой винт 13 при неподвижных гайке 15 и гильзе 14, удерживаемых самотормозящейся червячной передачей 11.

Рис. 11. Силовая головка Минского завода автоматических линий и агрегатных станков МЗАЛ: а – кинематическая схема; б – внешний вид
Работа на «мертвый упор». Условия работы на «мертвый упор» при приводе суппорта ходовым винтом значительно сложнее, чем при кулачковом приводе, осуществляющем уменьшение подачи, выстой неподвижного инструмента необходимой длительности, реверсирование и отвод суппорта за счет соответствующего профилирования кулачка. Все эти элементы цикла при применении ходового винта получаются за счет конструкции его привода и системы управления. Для получения точных и стабильных размеров сила на упоре и вызванные ею отжимы в суппорте должны быть постоянными при возможности независимой регулировки силы отжима. Особое значение это имеет для точной обработки по диаметру с поперечных суппортов. При кулачковом приводе это достигается регулировкой упора, длины хода суппорта и положения инструмента. При ходовом винте возможность регулирования силы отжима регулировкой установки упора и длины хода суппорта исключена. Сила отжима при выстое остается постоянной не при всех конструкциях.
Выстой суппорта на мертвом упоре при ходовом винте осуществляется двумя способами: 1) использованием предохранительных муфт, проскальзывающих при выстое суппорта на мертвом упоре; 2) монтажом продольных опор ходового винта на пружинах.
Применяются предохранительные шариковые муфты, а при больших крутящих моментах – кулачковые муфты с неравномерным распределением кулачков для облегчения проскальзывания и «прощелкивания» один раз за оборот.
Для выстоя на мертвом упоре электродвигатель ускоренного хода переключается в конце рабочего хода конечным выключателем на отвод через реле времени.
Преимущество этого способа – постоянство нагрузки на привод винта при выстое суппорта на упоре. Если не учитывать влияния промежуточных звеньев привода, то можно полагать, что это обеспечивает постоянство силы отжима на упоре, а это имеет решающее значение.
Регулировка силы отжима ограничена условиями работы муфты как предохранительного звена. Наименьшая сила отжима не может быть меньше максимально возможной тяговой силы подачи при резании. Однако этот недостаток не является решающим, и применение проскальзывающих предохранительных муфт является основным способом получения выстоя суппорта на мертвом упоре при приводе суппорта ходовым винтом (см. рис. 5, 10, 11).
Другой способ получения выстоя суппорта на мертвом упоре показан на схеме привода продольного суппорта полуавтомата (рис. 12). Двигатель постоянного тока, сопряженный с ЭМУ, используется для цикловой настройки скоростей рабочих и холостых ходов при управлении циклом от командоаппарата.
Для работы на мертвом упоре и предохранения от перегрузки продольная опора винта опирается на тарельчатые пружины. Для выстоя на мертвом упоре винт, смещаясь с подпружиненной опорой, действует на конечный выключатель, переключающий электродвигатель через реле времени.
Недостатки этого способа выстоя на мертвом упоре следующие:
- неплавный ход рабочей подачи при подпружиненной опоре ходового винта;
- переменная сила отжима суппорта на мертвом упоре, возрастающая по мере выстоя, что влияет на точность обработки;
- излишняя перегрузка механизма при выстое суппорта, что может привести к поломке при его отладке.
Эти недостатки заставляют предпочитать для обеспечения на мертвом упоре предохранительные проскальзывающие муфты.

Рис. 12. Схема привода продольного суппорта полуавтомата: И – исходное положение; К – конец цикла; П1, П2, П3 – переключение скорости передач
Общая схема
В данном проекте разрабатывается агрегатный станок по нарезанию гаек с мелкими шагами. Данный станок предназначен для обработки из шестигранных заготовок серии одинаковых деталей диаметром до 25 мм и длиной до 15 мм из материала сталь 20Х.
Данный станок позволяет осуществить сверление, зенкерование, развертывание в диапазоне диаметров 25…10 мм, а также нарезание резьбы с мелкими шагами в зависимости от установленного метчика.
Станок имеет самодействующую четырехшпиндельную силовую головку, а также пятипозиционный поворотный делительный стол, имеющий следующие позиции:
1 позиция – загрузочная;
2 позиция – сверление;
3 позиция – зенкерование.
4 позиция – развертывание.
5 позиция – нарезание резьбы.
Технические характеристики данного станка приведены в таблице 1.
Таблица 1 – Технические характеристики станка
|
Характеристика |
Величина |
|
Максимальный диметр сверления |
25 мм |
|
Минимальный диаметр сверления |
10 мм |
|
Пределы оборотов шпинделя силовой головки для сверления |
250-800 об/мин |
|
Число ступеней коробки скоростей силовой головки для сверления |
6 |
|
Число позиций поворотного стола |
4 |
|
Мощность привода силовой головки для сверления |
1,3 кВт |
Структурная схема данного станка приведена на рисунке 2.1 Силовая головка и поворотный делительный стол связаны электрической схемой. На данном рисунке показаны движения: П1 – главное; В3 – движение подачи; В5 – вспомогательное движение.
Рис.2.1 – Структурная схема агрегатного станка
Разработка кинематической схемы станка
На все элементы данного станка наложены электрические связи, что обеспечивает синхронность работы оборудования.
Станок работает следующим образом.
Вал I коробки скоростей связан с валом электродвигателя М1 мощностью 1,3 кВт. От электродвигателя через зубчатые колеса 1 и 2 вращение сообщается валу II, на котором жестко закреплены зубчатые колеса 3, 4,5. Вращение на вал III может доставляться по трем путям: при зацеплении колес 3 и 6, при зацеплении колес 4-7 или через колеса 5-8. Движение подачи осуществляется перемещением корпуса силовой головки при передачи вращения от вала III через колеса 11-13 на ходовой винт V. На шпиндель вращение передается от вала III двумя путями: при зацеплении колес 9-11 или колес 10-12 шпинделю.
После произведенной обработки, производится отвод силовых головок и поворот стола.
Движение поворотного делительного стола осуществляется следующим образом.
К корпусу стола прикреплены электродвигатели М3 и М4. Электродвигатель М3 через пару зубчатых колес 30 и 31 и самотормозящую червячную передачу 29 осуществляет вращение зубчатого колеса 28, которое находиться в зацеплении с зубчатым венцом 27, прикрепленным к планшайбе стола. Планшайба центрируется подшипником. При прохождение фиксаторного пальца мимо упора посредством рычажной системы переключаются муфта М1, выключающая электродвигатель М3 и включающая электродвигатель М4. Происходит реверсирование планшайбы. После устранения зазоров во всей кинематической цепи сила тока в электродвигателе выключает его, при этом червячная пара оказывается заклиненной.
Проектирование токарного станка
Содержание
Введение
. Описание служебного назначения
станка
. Расчет режимов резания и выбор
электродвигателя привода станка
. Разработка структурной схемы
станка
. Разработка кинематической схемы
станка
. Силовой расчет привода и выбор
геометрических параметров элементов привода
. Проектирование шпиндельного узла
Заключение
Литература
Введение
Современные металлорежущие станки – это весьма
развитые машины, включающие большое число механизмов и использующие
механические, электрические, гидравлические и другие методы осуществления
движений и управления целиком.
По конструкции и назначению трудно найти более
разнообразные машины, чем металлорежущие станки. На них обрабатывают
всевозможные детали – от мельчайших осей, шестерёнок и рычажков для часов и приборов
до громадных деталей, размеры которых достигают многих метров, для турбин,
прокатных станов. Поэтому габариты станков различны.
На станках обрабатывают и такие простые детали,
как гладкий валик, и детали, имеющие очень сложные поверхности, описываемые
математическими уравнениями или задаваемые графически,- криволинейные кулачки,
турбинные лопатки, штампы, лопасти авиационных винтов и др. При этом
достигается высокая точность обработки, измеряемые нередко микронами и даже
долями микрона.
Высокую производительность современные станки
обеспечивают за счёт быстроходности, мощности и широкой автоматизации. При
конструктивном оформлении для придания станку требуемых качеств и функций
используют разнообразные механизмы с применением гидравлики, электрики, пневматики;
применяют также детали сложных конструктивных форм с высокими требованиями к их
качественным показателям, внедряют прогрессивные принципы проектирования
(агрегативные, унификация); изыскивают наиболее рациональные компоновки
станков, разрабатывают новые системы управления целиком.
Таким образом, станки, которые называют
металлорежущими, включают более широкую группу машин-орудий, обрабатывающих не
только металлы, но другие материалы различными способами.
Металлорежущие станки подразделяют на следующие
группы: токарные, сверлильные и расточные, шлифовальные и доводочные,
комбинированные (зубо- и резьбообрабатывающие), фрезерные, строгальные,
долбёжные и протяжные, разрезные, разные.
Токарные станки делятся на универсальные и
специализированные. Универсальные станки предназначены для выполнения самых
разнообразных операций: обработки наружных и внутренних цилиндрических,
конических, фасонных и торцевых поверхностей; нарезания наружных и внутренних
резьб; отрезки, сверления, зенкерования и развёртывания отверстий. На
специализированных станках выполняют более узкий круг операций, например
обтачивание гладких и ступенчатых валов, прокатных валков, осей колёсных пар
железнодорожного транспорта, различного рода муфт, труб и т.п. Универсальные
станки подразделяются на токарно-винторезные и токарные.
станок клиноременной привод
шпиндельный
1. Описание служебного назначения станка
Согласно исходных данных задания,
максимальный диаметр обработки Dmax=350 мм,![]()
![]() , эффективная мощность резанья Nv=4,5 кВт.
, эффективная мощность резанья Nv=4,5 кВт.
Принимаем за прототип токарно-винторезный станок модели 1А12П.
Станок является универсальным. Он
предназначен для выполнения разнообразных токарных работ: для нарезания
метрической, модульной, правой и левой, с нормальным и увеличенным шагом, одно-
и многозаходной резьб, для нарезания торцевой резьбы и для копировальных работ
(с помощью прилагаемого к станку гидрокопировального устройства). Станок
применяется в условиях индивидуального и мелкосерийного производства.
К основным узлам станка относят:
гитара сменных колёс, передняя бабка с коробкой скоростей, суппорт, задняя
бабка, шкаф с электрооборудованием, привод быстрых перемещений суппорта, фартук,
станина, коробка подач.
К органам управления относят:
рукоятки коробкой скоростей, рукоятка переключения звена увеличения шага,
грибок управления реверсом для нарезания правых и левых резьб, маховичок
ручного продольного перемещения суппорта, ползунок с пуговкой для включения и
выключения реечной шестерни фартука, рукоятка ручного поперечного перемещения
суппорта, кнопочная станция, рукоятка ручного перемещения верхней части
суппорта, кнопка включения быстрых перемещений суппорта, рукоятка включения (выключения)
и реверсирования продольной и поперечной подач суппорта, рукоятки включения
(выключения) и реверсирования вращения шпинделя, рукоятка включения маточной
гайки фартука, рукоятки управления коробкой подач.
Движения в станке. Движение резания
– вращение шпинделя с обрабатываемой деталью. Движение подач – перемещение
суппорта в продольном и поперечном направлениях. Все движения подач являются
прямолинейными поступательными движениями. Вспомогательные движения – быстрые
перемещения суппорта в продольном и поперечном направлениях от отдельного
привода, ручные установочные перемещения суппорта в продольном и поперечном
направлениях, а верхней части суппорта – под любым углом к оси вращения детали;
перемещения и зажим пиноли задней бабки. Перемещение и закрепление задней бабки
и поворот четырёхпозиционного резцедержателя осуществляется вручную.
Принцип работы. Обрабатываемая
деталь устанавливается в центрах или закрепляется в патроне. В резцедержателе
могут быть закреплены четыре резца. Поворотом резцедержателя каждый из четырех
резцов может быть установлен в рабочее положение. Инструменты для обработки
отверстий вставляются в пиноль задней бабки. Прилагаемый к станку
гидрокопировальный суппорт благодаря наличию следящей системы позволяет
обрабатывать партии ступенчатых и фасонных деталей по шаблону или эталонной
детали, без промеров и ручного управления станком в процессе обработки.
Включение механической подачи
суппорта в любом направлении производиться одной мнемонической рукояткой.
Термин «мнемоническая» означает, что направление поворота рукоятки совпадает с
направлением выбранной подачи.
В станке предусмотрена возможность
быстрых перемещений суппорта в продольном и поперечном направлениях. При этом
включение быстрых перемещений производиться той же мнемонической рукояткой, но
с дополнительным нажимом кнопки, расположенной в верхней части рукоятки.
Закрепление задней бабки на
направляющих станины и её освобождение также осуществляется одной рукояткой,
которая приводит в действие эксцентриковый зажим
2. Расчет режимов резания и выбор
электродвигателя привода станка
Черновое точение. Характеризуется большими
значениями глубины резания и подачи, а также работой по загрязненной
поверхности или поверхности с коркой.
Скорость резания
![]()
![]()
где ![]()
![]() – коэффициент при точении;
– коэффициент при точении;
Т – период стойкости резца, мин;
t-глубина
резания, мм;
s – подача,
мм/об;
![]()
![]() -поправочный коэффициент.
-поправочный коэффициент.
![]()
![]()
где ![]()
![]() – коэффициент, учитывающий качество
– коэффициент, учитывающий качество
обрабатываемого материала;
![]()
![]() – коэффициент, отражающий состояние
– коэффициент, отражающий состояние
поверхности заготовки;
![]()
![]() – коэффициент, учитывающий качество
– коэффициент, учитывающий качество
материала инструмента.
При обработке стали
![]()
![]()
где ![]()
![]() – коэффициент, характеризующий
– коэффициент, характеризующий
группу стали по обрабатываемости;
![]()
![]() – предел прочности материала
– предел прочности материала
заготовки.
![]()
![]() ;
;
![]()
![]()
Сила резания
![]()
![]()
где ![]()
![]() – коэффициент при силе резания.
– коэффициент при силе резания.
![]()
Мощность резания
![]()
![]()
Частота вращения шпинделя
![]()
![]()
где D – диаметр
обрабатываемой заготовки, мм.
![]()
Чистовое точение. Характеризуется
малыми значениями глубины резания и подачи, а также работой по чистой
поверхности.
Скорость резания
![]()
Для стали ![]()
![]()
Сила резания
![]()
Мощность резания
![]()
Частота вращения шпинделя
![]()
Скорость резания для чугунов и цветных металлов
определяется:
KV
– поправочный коэффициент,
KV
= KМV×KПV×KИV,
где
KМV – коэффициент, учитывающий
качество обрабатываемого материала,ПV – коэффициент, учитывающий
состояние поверхности заготовки,ИV – коэффициент, учитывающий износ
инструментального материала.
серый чугун:
![]()
Медные сплавы:![]()
![]()
Так как скорости резанья чугунов и
цветных металлов меньше чем у стали, то дальнейший расчёт не имеет смысла,
так как на выбор параметров станка влиять не будет.
Предварительно выберем
электродвигатель для привода главного движения. Необходимо, чтобы мощность
двигателя превышала максимально требуемую мощность для осуществления процесса
резания, т.е. ![]()
![]() . Выберем двигатель А52-4, для
. Выберем двигатель А52-4, для
которого n=1440
об/мин, N=4.5 кВт.
3. Разработка структурной схемы станка
Составление кинематической структуры станка
Составление кинематической структуры станка при
точении
Наносим схему обработки и элементарные движения
В1 и П2. На схеме условно показывается закрепление детали
(в центрах станка) и резца в резцедержателе суппорта с учетом обеспечения
последующего движения врезания (поперечное перемещение). Далее наносится
внутренняя связь 3 – 4 (шпиндель – опоры качения) кинематической группы,
создающей движение скорости резания Фv(В1),
внешняя связь с органом настройки ivи
источник движения – электродвигатель М. Внешняя связьсодержит реверсивное
устройство Р2.
Внутренняя связь кинематической группы,
создающей движение подачи Фs(П2),
представляет собой кинематическую пару скольжения 5 – 6 (суппорт – направляющие
станины). Источником движения является шпиндель.
Рисунок 1 – Кинематическая структура станка при
точении
Конечным звеном, обеспечивающим перемещение
суппорта при точении, является передача шестерня – рейка, преобразующая
вращательное движение через ходовой вал и червячную передачу в поступательное.
Внешней связью рассматриваемой кинематической группы является связь 2 – 7
включая червячную и реечную передачи. Органом настройки является коробка подач is.В
цепи 2 – 7 применяется реверсивное устройство Р1.На станке имеет
место движение врезания Вр(П3) – поперечное перемещение каретки
суппорта с резцом, обеспечивающее установку вершины резца в заданное положение
на расстояние радиуса детали R
от оси центров станка.
Составление кинематической структуры станка
нарезании резьбы резцом
Порядок составления кинематической структуры
станка при нарезании резьбы аналогичен составлению кинематической структуры
станка при точении, только при нарезании резьбы используется ходовой винт,
обеспечивающий точное перемещение суппорта на каждый оборот шпинделя.
Рисунок 2 – Кинематическая структура станка при
нарезании резьбы резцом
Компоновка станка
Компоновочная формула: СhOZХвwd,
где Сh
-горизонтальный шпиндель, О – стационарный блок – станина, Z
– суппорт, Х – каретка суппорта, в – пово-ротные салазки суппорта, w
– верхняя каретка суппорта, d
– четырехпозиционный резцедержатель.
Рисунок 3 – Компоновка токарного станка модели
1А12П
. Разработка кинематической схемы станка
Определение числа скоростей привода главного
движения
Частоты вращения шпинделя ![]()
![]() образуют отрезок геометрического
образуют отрезок геометрического
ряда со знаменателем ц. Число ступеней частот – z.
Число ступеней частоты вращения шпинделя
определяется по формуле
![]()
![]()
где ц – знаменатель геометрического
ряда, равный для токарных станков 1.26.
![]()
![]() .
.
Определим значения частот вращения
шпинделя
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Построение графика частот вращения
Для возможности передачи шпинделю
16-ти частот вращений примем привод главного движения со сложенной структурой,
так как использование множительной структуры не позволяет реализовать коробку
скоростей с 16-ю скоростями. Сложенная структура получается из двух
определенным образом соединенных структур с последовательно соединенными групповыми
передачами. Первая структура называется основной, вторая – дополнительной.
Структурная формула привода главного будет иметь вид
![]()
Исходя из структурной формулы
построим структурную сетку. Вертикальными линиями обозначим валы привода,
горизонтальными -частоты вращения шпинделя. Точки пересечения вертикальных
линий с горизонтальными соответствуют частотам вращения валов, представленным в
логарифмическом масштабе. Луч с наклоном вверх изображает повышающую передачу, луч
с наклонно вниз – понижающую, горизонтальный луч – передачу с передаточным
отношением, равным 1. Параллельные лучи изображают одну и ту же передачу. Для
обеспечения приемлемых радиальных размеров коробок скоростей вводя ограничения
на передаточные отношения передач ![]()
![]() , т.е для ц=1.26 луч, изображающий
, т.е для ц=1.26 луч, изображающий
передаточное отношение передачи, может опускаться вниз максимум на 6 интервалов
и подыматься вверх на 2.
Рисунок 4.1 – Структурная сетка
основной группы
Опираясь на кинематическую схему
привода главного движения станка-аналога и используя структурную сетку построим
кинематическую схему. Так как числа зубьев зубчатых колес пока неизвестны, все
зубчатые колеса на кинематической схеме изобразим одинакового размера.
Рисунок 4.2 – Структурная сетка
дополнительной группы
Рисунок 5 – Кинематическая схема
привода главного движения
Используя кинематическую схему и
структурные сетки построим график частот вращения шпинделя. Для его построения
необходимо задаться передаточными отношениями передач. Условием для задания
передаточных отношений является предпочтительность передач 1:1. С другой
стороны, средством уменьшения радиальных размеров служит равенство ![]()
![]() , что приводит к симметричному
, что приводит к симметричному
расположению лучей.
Рисунок 6 – График частот вращения
Определяем передаточные отношения
передач
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Определение чисел зубьев зубчатых
колес
Числа зубьев зубчатых колес
подбираем по таблицам 4.2 – 4.5 [6] исходя из найденных передаточных отношений
передач.
![]()
. Силовой расчет привода
Предварительный расчет валов
Расчет второго вала
Крутящий момент на валу
![]()
![]()
где ![]()
![]() – мощность на i-валу, кВт;
– мощность на i-валу, кВт;
![]()
![]() -минимальная частота вращения i-вала,
-минимальная частота вращения i-вала,
об/мин.
![]()
![]()
где ![]()
![]() – КПД ременной передачи;
– КПД ременной передачи;
![]()
![]() – КПД пары подшипников;
– КПД пары подшипников;
![]()
![]() – КПД зубчатой передачи;
– КПД зубчатой передачи;
х – показатель степени, равный
количеству соответствующих передач.
![]()
![]()
Диаметр вала
![]()
![]()
где ф – предел прочности материала
вала при кручении, МПа. Для стали ф=15…20 МПа.
Значение d округляем
до ближайшего стандартного.
Остальные валы рассчитываются
аналогично. Результаты расчетов:
![]()
![]()
![]()
![]()
![]()
![]()
Расчет модулей зубчатых передач
Модуль рассчитаем для первой и последней
зубчатых передач, т.е. найдем его минимальное и максимальное значение, для
промежуточной передачи возьмем промежуточное значение модуля.
Расчет модуля первой зубчатой передачи
![]()
![]()
где ![]()
![]() – модуль, необходимый для
– модуль, необходимый для
обеспечения изгибной прочности зубьев зубчатых колес i-передачи;
![]()
![]() – минимальное число зубьев
– минимальное число зубьев
зубчатого колеса в передаче;
![]()
![]() – коэффициент, равный отношению
– коэффициент, равный отношению
ширины зубчатого колеса к модулю, ![]()
![]() ;
;
![]()
![]() ;
;
![]()
![]() – допускаемое напряжение изгиба
– допускаемое напряжение изгиба
материала зубчатых колес.
При термической обработке материла
зубчатых колес – улучшении – ![]()
![]() определяется по формуле
определяется по формуле
![]()
![]()
где – ![]()
![]() твердость материала зубчатых колес.
твердость материала зубчатых колес.
![]()
![]()
![]() ,
,
где ![]()
![]() – коэффициент динамичности
– коэффициент динамичности
нагрузки;
![]()
![]() – коэффициент концентрации
– коэффициент концентрации
нагрузки. Учитывается только при определении ![]()
![]() .
.
Коэффициент К определяется только
при окружной скорости большего колеса ![]()
![]()
![]()
![]()
где z – число
зубьев большего колеса в передаче.
Для определения ![]()
![]() необходимо знать значение модуля,
необходимо знать значение модуля,
который мы и пытаемся найти. Чтобы все-таки определить окружную скорость
колеса, для расчетов возьмем значение модуля зубчатых передач станка-аналога,
которое для станка 1А12П равно 2.

![]()

![]()
![]()
где ![]()
![]() – модуль, необходимый для
– модуль, необходимый для
обеспечения прочности по нормальным напряжениям зубьев зубчатых колес i-передачи;
![]()
![]() – допускаемое контактные напряжение
– допускаемое контактные напряжение
материала шестерни;
![]()
![]() – минимальное передаточное
– минимальное передаточное
отношение зубчатой передачи.
При термической обработке материла
зубчатых колес – улучшении – ![]()
![]() определяется по формуле
определяется по формуле
![]()
![]()
![]()

Из найденных двух значений модуля
выбираем наибольшее, т.еm1=2 мм.
Расчет модуля последней зубчатой
передачи
Для уменьшения модуля последней
зубчатой передачи изменим вид термообработки зубчатых колес на закалку ТВЧ по
контуру зубьев. Тогда
![]()
![]()
![]()

![]()
![]() .
.
Модуль последней зубчатой передачи m3=4 мм. Для
промежуточной передачи примем m2=2.5 мм.
Определение размеров зубчатых колес
Для примера рассчитаем параметры
зубчатого колеса z1, для
которого z=43, m=2 мм.
![]()
![]()
Диаметр окружности вершин колеса
![]()
![]()
Диаметр окружности впадин колеса
![]()
![]()
Ширина колеса
![]()
![]()
Остальные зубчатые колеса
рассчитываются аналогично.
Расчет клиноременной передачи
В приводе главного движения станка
применяются две клиноременные передачи. Для примера рассчитаем первую передачу.
Частота вращения меньшего шкива ![]()
![]()
По рисунку 7.3 [1, с.134] определяем
сечение ремня – А.
Вращающий момент
![]()
![]()
Диаметр меньшего шкива
![]()
![]()
Полученное значение диаметра
округляем по ГОСТ 17383-73 до ближайшего стандартного. ![]()
![]() .
.
Диаметр большего шкива
![]()
![]()
Полученное значение округляем по
ГОСТ 17383-73 до ближайшего значения. ![]()
![]() .
.
Уточненное передаточное отношение
![]()
![]()
Межосевое расстояние, в интервале
![]()
![]()
где ![]()
![]() – толщина клинового ремня, мм.
– толщина клинового ремня, мм.
![]()
![]()
![]()
Длина ремня

Полученное значение округляем до
ближайшего стандартного. ![]()
![]() .
.
Уточненное межосевое расстояние
![]()
![]()
![]()
![]()
![]()
Угол обхвата ремнем меньшего шкива
![]()
![]()
Число ремней
![]()
![]()
где ![]()
![]() – коэффициент режима работы;
– коэффициент режима работы;
![]()
![]() – мощность, допускаемая для
– мощность, допускаемая для
передачи одним ремнем, кВт;
![]()
![]() – коэффициент, учитывающий влияние
– коэффициент, учитывающий влияние
длины ремня;
![]()
![]() – коэффициент угла обхвата;
– коэффициент угла обхвата;
![]()
![]() – коэффициент, учитывающий число
– коэффициент, учитывающий число
ремней в передаче.
![]()
Натяжение ветви ремня
![]()
![]()
где ![]()
![]() – окружная скорость ремня, м/с;
– окружная скорость ремня, м/с;
![]()
![]() – коэффициент, учитывающий
– коэффициент, учитывающий
центробежную силу, ![]()
![]()
![]()
![]()
![]()
Сила, действующая на вал
![]()
![]()
6. Проектирование шпиндельного узла
Обоснование конструкции шпинделя, выбор
материала и термообработки.
Согласно принятого прототипа станка
модели 1А12Пконец шпинделя по ГОСТ 12593-72-61С (условный номер). Это означает,
что диаметр конической поверхности шпинделя для базирования токарного патрона Ш
106,375 мм, угол ![]()
![]() , диаметр шпонки, передающий
, диаметр шпонки, передающий
крутящий момент от шпинделя к патрону Ш 19 мм. Диаметр расположения шпонки
резьбовых отверстий М12-7Н для крепления патрона Ш 133,4 мм.
В передней опоре шпинделя установим
один двухрядный роликовый подшипник четвертого класса точности, условное
обозначение 4-3182 116 ГОСТ 7634-75 с размерами dЧDЧВ=80Ч125Ч32
(мм) и два упорных подшипника пятого класса точности, условное обозначение
5-8118 ГОСТ 6874-75. Эта опора защемлена, она воспринимает осевые и радиальные
усилия, действующие на шпиндель в процессе резания металлов.
В передней опоре шпинделя установлен
один шариковый однорядный радиальный подшипник пятого класса точности, условное
обозначение подшипника 5-312 ГОСТ 8338-75 с размерами dЧDЧВ=60Ч130Ч31
(мм). Эта опора плавающая, она воспринимает только радиальную нагрузку.
Материал для изготовления шпинделя
принимаем легированную сталь 20Х ГОСТ 4543-74 с цементацией посадочных
поверхностей под подшипники, зубчатые колеса, передний торец шпинделя и
внутреннее отверстие Морзе 5. Твердость термообработанных поверхностей HRC 56…62 на
глубину 1,2…2 мм.
Описание системы смазки шпиндельного
узла и привода главного движения в целом.
Смазка шпиндельного узла, коробки
скоростей и привода подач осуществляется циркуляционной системой смазки.
Лопастной насос системы смазки приводится от первого вала коробки скоростей.
Масло из масляного бака 1, расположенного в тумбе станка (см. рис. 8), насосом
4, через сетчатый фильтр 5, подается в маслопровод 8 и используется для смазки
механизмов коробки подач 9, шпиндельной передней бабки 11 и коробки скоростей
6.
Часть масла, пройдя через
смазывающие части коробки подач, собирается на дне корпуса и по сливном
маслопроводу 7 через сливной фильтр 16 возвращается в масленый резервуар.
Остальная часть масла по
маслопроводу подается для смазки заднего подшипника 10 шпинделя, а также для
смазки зубчатых колес шпиндельной бабки. Для этого маслопровод проходит в
верхней части корпуса шпиндельной бабки и упирается в контрольный глазок 13. В маслопроводе
имеются несколько отверстий, из которых разбрызгивается масло на зубчатые
колеса, а из конца маслопровода масло попадает на контрольный глазок 13,
указывая о работе насоса, и стекает в распределительную ванну 12, откуда
подается на передний подшипник 14 шпинделя. Пройдя через смазываемые части
шпиндельной бабки, масло собирается на дне корпуса и через сливной маслопровод
15 и фильтр 16 попадает в коробку скоростей 6. В коробке скоростей маслопровод
проходит в верхней части и через отверстия в маслопроводе масло смазывает
трущиеся поверхности дисков электромагнитных муфт, вращающимися частями
электромагнитных муфт масло разбрызгивается, смазывая зубчатые колеса и
подшипники валов. Собирается масло на дне корпуса коробки скоростей, откуда по
маслопроводу и фильтру 16 сливается в масляный резервуар.
Контроль за уровнем масла в
резервуаре осуществляется прозрачным глазком 2, слив масла через отверстие 17,
залив через отверстие 3.
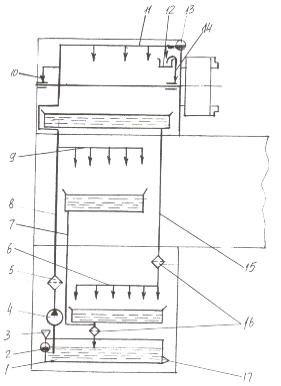
Рисунок 7 – Схема смазки привода главного
движения
Расчет шпиндельного узла на жесткость.
Составим расчетную схему шпинделя. Из сборочного
шпиндельного узла определяем расстояния:
![]()
Расчет шпинделя на жесткость произведем по
формулам 12[5]; определение рабочего прогиба и угла наклона и(рад):
![]()
![]() ,
,
где ![]()
![]() и
и ![]()
![]() – радиальная жесткость подшипников
– радиальная жесткость подшипников
передней и задней опоры, по диаграмме ориентировочной жесткости шпиндельных
опор рис.225[5]:
для передней опоры принимаем ![]()
![]() ;
;
для задней опоры ![]()
![]() .
.
![]()
![]() – модуль упругости материала
– модуль упругости материала
шпинделя сталь 20Х.
![]()
![]() – окружная сила резания
– окружная сила резания
По заданию эффективная мощность
резания ![]()
![]()
Окружная сила резания (стр.229[6]),
![]()
![]() ,где
,где
![]()
![]() – скорость резания,
– скорость резания, ![]()
![]() , где
, где
![]()
![]() – максимальный диаметр
– максимальный диаметр
обрабатываемой заготовки;
![]()
![]() – число оборотов шпинделя.
– число оборотов шпинделя.
Составляющие силы: радиальную ![]()
![]() и осевую
и осевую ![]()
![]() определим, пользуясь приближенным
определим, пользуясь приближенным
соотношением (стр.229[6]):
![]()
![]()
![]() .
.
![]()
![]() – окружное усилие, действующие на
– окружное усилие, действующие на
шпиндель от зубчатого зацепления ![]()
![]() ;
;
![]()
![]() – радиальное усилие в этом
– радиальное усилие в этом
зацеплении;
![]()
![]() ,
, ![]()
![]() – момент инерции сечения шпинделя и
– момент инерции сечения шпинделя и
пролета между опорами.
![]()
![]() ;
; ![]()
![]() ,
,
где ![]()
![]() – средний диаметр шпинделя
– средний диаметр шпинделя
консольного участка;
![]()
![]() – средний диаметр шпинделя участка
– средний диаметр шпинделя участка
между опорами.
![]()

![]()
![]() – см. расчетную схему шпинделя.
– см. расчетную схему шпинделя.
Тогда ![]()
![]()
![]()
![]() .
.
Прогиб в вертикальной плоскости:
Прогиб в горизонтальной плоскости:
Суммарный прогиб:
![]()
Допустимый прогиб равен:
![]()
Угол наклона в передней опоре в
вертикальной плоскости:
в горизонтальной плоскости:
Суммарный угол поворота:
![]()
![]()
![]() , где
, где
![]()
![]() – допустимый угол наклона шпинделя
– допустимый угол наклона шпинделя
в передней опоре (стр.335[5]). Следовательно, шпиндель по жесткости соответствует
заданным режимам работы.
Расчет шпиндельного узла на точность
В результате этого расчета выбирают класс
точности подшипников шпиндельного узла в зависимости от допускаемого
радиального биения Д. Для токарных станков нормальной точности величина Д=10
мкм.
![]()
![]()
![]()
![]()
Зная величины ДА и ДВ
определяем требуемые величины полей допусков отверстий под подшипники
передней и задней опор
![]()
![]()
![]()
![]()
Таким образом, для передней опоры
примем подшипники класса точности 5, для задней опоры – на класс грубее, т.е.
6.
Заключение
Курсовое проектирование – важная
составная часть учебного процесса. В ходе курсового проектирования студенты
приобретают опыт самостоятельного решения практических задач, изучают
современные конструкции технических устройств и тенденции их развития,
приобретают навыки использования средств вычислительной техники при решении
задач. Работа над курсовым проектом является тем процессом, который дает
возможность студентам проявить свои творческие способности, интуицию и
фантазию, поскольку принятие решений в проектах мало связано с применяемостью
материалов и комплектующих изделий.
При выполнении курсовой работы
применялись пособия по курсовому проектированию металлорежущих станков многих
технических вузов России. Изложенный в них материал может быть использован при
выполнении индивидуальных и комплексных, чисто учебных и реальных проектов. В
пособиях даны основы конструирования главных приводов, приводов подачи, тяговых
механизмов, направляющих и других механизмов и устройств современных станков и
станочных комплексов.
Эффективными инструментами
инженера-конструктора являются средства вычислительной техники и системы
автоматизированного проектирования; естественно, их применение при выполнении
курсовых проектов обязательно. Используя знания в области вычислительной
техники, программирования и математического моделирования, а также изложенные в
данном пособии алгоритмы расчета и проектирования узлов станков и станочных
комплексов, студент разрабатывает одну-две программы расчета на ЭВМ и
производит соответствующие расчеты в диалоговом или пакетном режимах.
Список использованной литературы
1. Анурьев В.И. Справочник
конструктора-машиностроителя: В 3-х т. Т. 1. – 8-е изд., перераб. и доп. Под
ред. И.Н. Жестковой. – М.: Машиностроение, 2001. -920 с.: ил.
. Анурьев В.И. Справочник
конструктора-машиностроителя: В 3-х т. Т. 2. – 8-е изд., перераб. и доп. Под
ред. И.Н. Жестковой. – М.: Машиностроение, 2001. -920 с.: ил.
. Дунаев П.Ф., Леликов О.П. Детали
машин. Курсовое проектирование: Учеб. Пособие для машиностроит. спец. техникумов.
– М.: Высш. Шк., 1984. -336 с.: ил.
. Зайцев Б.Г., Шевченко А.С.
Справочник молодого токаря. – М.: Высш. Школа, 1979. -397 с.; ил.
. Колев Н.С., Красниченко Л.В.,
Никулин Н.С. и др. Металлорежущие станки. Учеб. Пособие для вузов. -2-е изд.,
перераб. и доп. – М.: Машиностроение, 1980. -500 с.: ил.
. Кочергин А.И. Конструирование и
расчет металлорежущих станков и станочных комплексов. Курсовое проектирование:
Учеб. Пособие для вузов. -Мн.: Выш. Шк., 1991. -382 с.: ил.
. Кучер А.М., Киватицкий М.М.,
Покровский А.А. Металлорежущие станки (альбом общих видов, кинематических схем
и узлов). Машиностроение, 1972 г. – 308 с.: ил.
. Проников А.С., Аверьянов О.И.,
Аполлонов Ю.С. и др. Проектирование металлорежущих станков и станочных систем:
Справочник-учебник. В 3-х т. Т. I:
Проектирование станков; Под общ. ред. А.С. Проникова. – М.: МГТУ им. Н.Э.
Баумана: Машиностроение, 1994. – 444 с.: ил.
. Свирщевский Ю.И., Макейчик Н.Н.
Расчет и конструирование коробок скоростей и подач. Минск, Вышейш. школа, 1976.
. Справочник
технолога-машиностроителя. В 2-х т. Т.1/под ред. А.М. Дальского, А.Г.
Косиловой, Р.К. Мещерякова, А.Г. Суслова. -5-е изд., перераб. и доп. -М.:
Машиностроение-1, 2001. -912 с.: ил.
. Справочник
технолога-машиностроителя. В 2-х т. Т.2/под ред. А.М. Дальского, А.Г.
Косиловой, Р.К. Мещерякова, А.Г. Суслова. -5-е изд., перераб. и доп. – М.:
Машиностроение-1, 2001. -912 с.: ил.
. Чернавский С.А., Боков К.Н.,
Чернин И.М., Ицкович Г.М., Козинцов В.П. Курсовое проектирование деталей машин.
– М.: ООО ТИД «Альянс», 2005. -416 с.
. Шумейко И.А.. Методические
указания к выполнению практического занятия № 1 «Составление шифра модели
станка и определение технологических возможностей» по дисциплине
«Металлорежущие станки» для студентов специальности 050712 – Машиностроение.
Павлодар. ПГУ имени С. Торайгырова. 2008.- 15 с.
. Шумейко И.А. Методические указания
к выполнению практического занятия № 2 «Определение структуры станков» по
дисциплине «Металлорежущие станки» для студентов специальности 050712 –
Машиностроение и 050732 – Стандартизация, метрология и сертификация. Павлодар.
ПГУ имени С. Торайгырова. 2008.- 20 с.
. Шумейко И.А. Методические указания
к выполнению практического занятия № 3 «Составление кинематической структуры
станка и его компоновки» по дисциплине «Металлорежущие станки» для студентов
специальности 050712 – Машиностроение и 050732 – Стандартизация, метрология и
сертификация. Павлодар. ПГУ имени С. Торайгырова. 2008.- 17 с.
