
Содержание
Введение 3
1 Структурно-кинематическая
схема объекта управления 4
2 Таблица
включений 6
3 Начальная
циклограмма работы механизма 8
4 Ввод элементов
памяти в систему 9
5 Реализуемая
циклограмма работы механизма 10
6 Минимизация
логических функций с помощью программы
MINWIN-Professional 13
7 Построение
функциональной схемы дискретного
автомата 15
8 Моделирование
работы дискретного автомата с помощью
системы ISaGRAF 16
9 Система управления
на элементах «И-НЕ» 17
10 Разработка
принципиальной электрической схемы
устройства в системе P-CAD 18
Заключение 19
Список литературы 21
Приложение А (обязательное) Результаты
моделирования 21
Приложение Б (обязательное) Функциональная
схема 22
Приложение В (обязательное) Функциональная
схема в базисе «И-НЕ» 23
Приложение Г (справочное) Справочный
данные выбранных микросхем 24
Приложение Д (обязательное) Схема
электрическая принципиальная и перечень
элементов 25
Введение
В настоящее время возрос интерес к
проблемам проектирования дискретно-логических
систем управления промышленной
электроавтоматики, реализуемой на
различной элементной базе: релейно-контактных
схемах, бесконтактных интегральных
микросхемах и на основе программируемых
логических контроллеров (ПЛК). Это
сложная техническая задача, для решения
которой разработчик должен хорошо
владеть теорией устройств дискретного
действия и математическим аппаратом
алгебры логики.
Большинство практических примеров
доказывают, что в современных станках
автоматизированы многочисленные
операции технологического обеспечения:
управление автоматической сменой
инструмента, управление переключениями
в приводах главного движения, управление
зажимными приспособлениями, охлаждением,
смазкой, перемещением ограждений и др.
В данной курсовой работе производится
синтез дискретной системы управления
автоматом-перекладчиком с использованием
прерывистых логических функций. На
основании выданного задания разрабатывается
структурно-кинематическая схема объекта
управления, составляются таблицы
включений. На основании таких таблиц
строится начальная циклограмма, а после
введения элемента памяти в подсистемы
получается реализуемая циклограмма.
Минимизация логических функций
производится с помощью программы
MINWIN-Professional.
В процессе построения функциональной
схемы устройства можно сделать вывод
о целесообразности выбора. Выбранная
схема реализуется с помощью системыISaGRAF, после чего
разрабатывается принципиальная
электрическая схема устройства в системеP-CAD.
1 Структурно-кинематическая схема объекта управления
Синтез дискретной системы управления
автоматом-перекладчиком будем производить
с использованием прерывистых логических
функций.
Система
управления автоматом-перекладчиком
состоит из двух приводов Д1
и Д2,
которые включаются и выключаются
попеременно, реализуя цикл работы
механизма, который представлен
на рисунке 1.1.

Рисунок 1.1 – Цикл работы механизма
Структурно-кинематическая схема ОУ
представлена на рисунке 1.2.

Рисунок 1.2 – Структурно-кинематическая
схема автомата
Положения захвата манипулятора с
приводом Д1контролируются путевыми
переключателямиАиB,
а положение каретки манипулятора с
приводомД2– путевыми переключателямиC1, С2иС3.Сигналы с этих переключателей являются
переменными дискретного автомата
(рисунок 1.3).
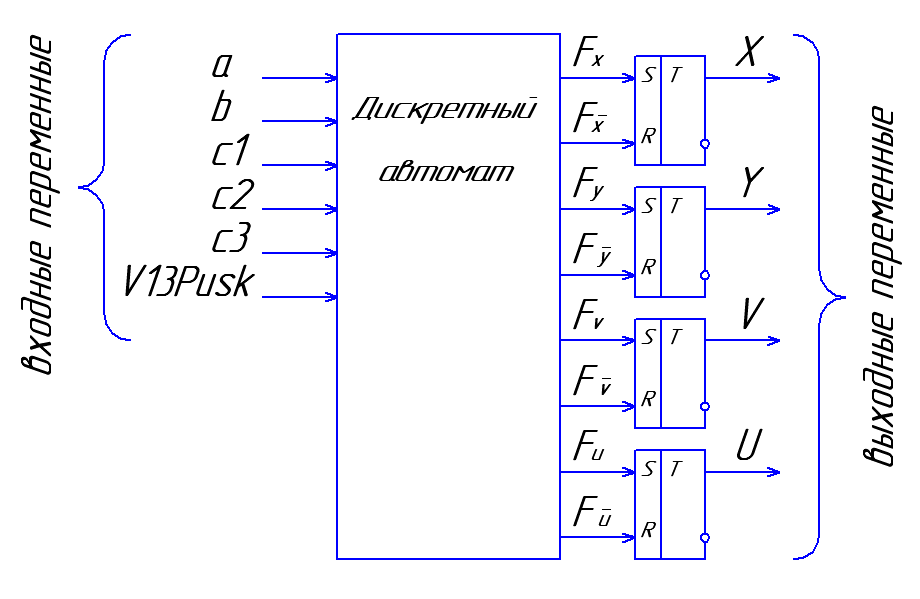
Рисунок
1.3 – Схема внешних связей дискретного
автомата
2 Таблица включений
Составим
таблицу включений с учетом сигнала
блокировки P
(Pusk).
Если Рusk=0,
то запуск автоматического цикла запрещен.
Первое действие автоматического цикла
(FX
= 1) разрешается
только при Рusk=1.
Этот сигнал может поступать от кнопки
«ПУСК»,
т.е. с пульта оператора, или от какой-либо
другой подсистемы, являющейся частью
общей системы управления.
Таблица 2.1 – Таблица включений дискретного
автомата
|
Такт |
Изменения
входных |
Изменения
выходных |
|
1 |
c1=1 |
Если |
|
2 |
a=0 |
|
|
3 |
b=1 |
|
|
4 |
b=0 |
|
|
5 |
a=1 |
|
|
6 |
c1=0 |
|
|
7 |
c2=1 |
|
|
8 |
с2=0 |
|
|
9 |
с3=1 |
|
|
10 |
а=0 |
|
|
11 |
b=1 |
|
|
12 |
b=0 |
|
|
13 |
a=1 |
|
|
14 |
c3=0 |
|
|
15 |
c2=1 |
|
|
16 |
c2=0 |
|
|
17 |
c1=1 |
|
|
18 |
a=0 |
|
|
19 |
b=1 |
|
|
20 |
b=0 |
|
|
21 |
a=1 |
|
|
22 |
c1=0 |
|
|
23 |
c2=1 |
|
|
24 |
a=0 |
|
|
25 |
b=1 |
|









Окончание таблицы 2.1
|
26 |
b=0 |
|
|
27 |
a=1 |
|
|
28 |
c2=0 |
|
|
29 |
c1=1 |
|


На
рисунке 2.1 в скобках обозначены виртуальные
переключатели, благодаря которым две
реальные переменные a
и b
можно заменить одним виртуальным
переключателем a.
В сложных системах замена реальных
переменных виртуальными сокращает
общее число переменных, что упрощает
процедуру минимизации логических
функций. В результате таблица включений
будет иметь вид представленный в таблице
2.2.
Таблица 2.2 – Таблица включений с
виртуальными переключателями
|
Такт |
Изменения входных |
Изменения выходных |
|
1 |
c1=1 |
|
|
2 |
a=1 |
|
|
3 |
a=0 |
|
|
4 |
c2=1 |
|
|
5 |
c3=1 |
|
|
6 |
a=1 |
|
|
7 |
a=0 |
|
|
8 |
c2=1 |
|
|
9 |
c1=1 |
|
|
10 |
a=1 |
|
|
11 |
a=0 |
|
|
12 |
c2=1 |
|
|
13 |
a=1 |
|
|
14 |
a=0 |
|














Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Таблица включений, в каждом из адресов которой замкнуты два контакта, имеет вид [c.486]
Таблица включений. Первый этап синтеза систем управления по пути состоит в установлении функциональной связи между входными и выходными сигналами в виде таблицы включения, в которой аргументами являются сигналы от конечных выключателей и элементов памяти, а функциями — сигналы к движению исполнительных органов и к включению и выключению памяти. [c.251]
Первый этап — составление таблицы включений по условиям действия системы управления. В нашем примере таблица включений имеет один и тот же вид (см. рис. 144, б) как для системы управления контрольно-сортировочным автоматом, так и для системы управления бункерами двух автоматов. [c.260]
Третий этап — упрощение формул включения. В нашем примере согласно таблице включений выходной сигнал /1 равен единице в рабочем состоянии 1 и нулю в запрещенных состояниях 2 и 3. Такие же значения, как и /1, имеет в этих состояниях сигнал х . Поэтому можно упростить формулу включения для сигнала , подавая только входной сигнал Хз. Тогда [c.260]
Таблица включений 251 Такт движения 244 [c.278]
Таблица включений. Первый этап синтеза систем управления по пути состоит в установлении функциональной связи между входными и выходными сигналами в виде таблицы состояний, в которой аргументами являются сигналы от конечных выключателей и элементов памяти, а функциями — сигналы к движению исполнительных органов и к включению и выключению памяти. Таблица состояний системы управления по пути с указанием рабочих, запрещенных и безразличных состояний для каждой функции называется таблицей включения, так как по ней устанавливается последовательность включения элементов системы. [c.533]
В нашем примере (см. рис. 197) таблица включений (табл. 13) содержит 8 состояний (логических тактов) при шести [c.534]
Подобные таблицы перевода, составленные для важнейших рассматриваемых величин и приведенные в конце книги, могут оказаться полезными при решении самых различных задач. В эти таблицы, наряду с единицами разных систем, включен ряд наиболее употребительных внесистемных единиц. Кроме того, учитывая, ПО некоторые из исключенных стандартами единиц до недавнего времени широко использовались на практике, а некоторые из них фактически существуют и сейчас (например, лошадиная сила), в таблицы включен также и ряд подобных единиц. [c.89]
Контакторы — Таблица включения 13—425 [c.355]
Этот случай может быть сведен к пункту 2, причем функция f задается таблицей включения, приведенной на рис. 3, а. [c.238]
Вопрос. Можно ли таблицы, включенные в документ, располагать бдс длинной стороны формата А4 [c.36]
Было бы интересно проследить за систематичностью экспериментальной логики Кулона, однако за отсутствием здесь для этого места, а также потому, что мемуар Кулона легко получить в библиотеках, ограничимся сведением всех данных в табл. 35. В эту таблицу включен также эксперимент № 13, в котором длина латунной проволоки 7 с подвешенным свинцовым цилиндром, весом 2 фунта, была увеличена в 4 раза, с 9 парижских дюймов до 36 (97,45 см), с целью изучить влияние изменения длины на крутильные колебания. При обсуждении эксперимента № 13 Кулон вновь отмечает, что он провел много аналогичных опытов, в точности подтверждающих полученные результаты, и поэтому он не видит необходимости включать их в свой трактат. [c.232]
Схемы управления лифтами рекомендуется строить с применением циклограмм, дающих более наглядное представление о работе схемы по сравнению с таблицами включения. [c.18]
Таблица включении элементов гидросхемы [c.204]
Последовательность замыкания и размыкания кон-т.актов, приводимых в действие от вала с кулачковыми шайбами, в функции угла поворота вала, называется диаграммой включений. Диаграмма включений, изображенная в виде таблицы, называется таблицей включений. Несколько контакторов и реле, а также различные устройства защиты, объединенные в законченное комплектное устройство для управления электроприводом, именуются магнитными контроллерами. [c.13]
| Таблица 3-13 Исполнения контроллеров по таблицам включения контактов | 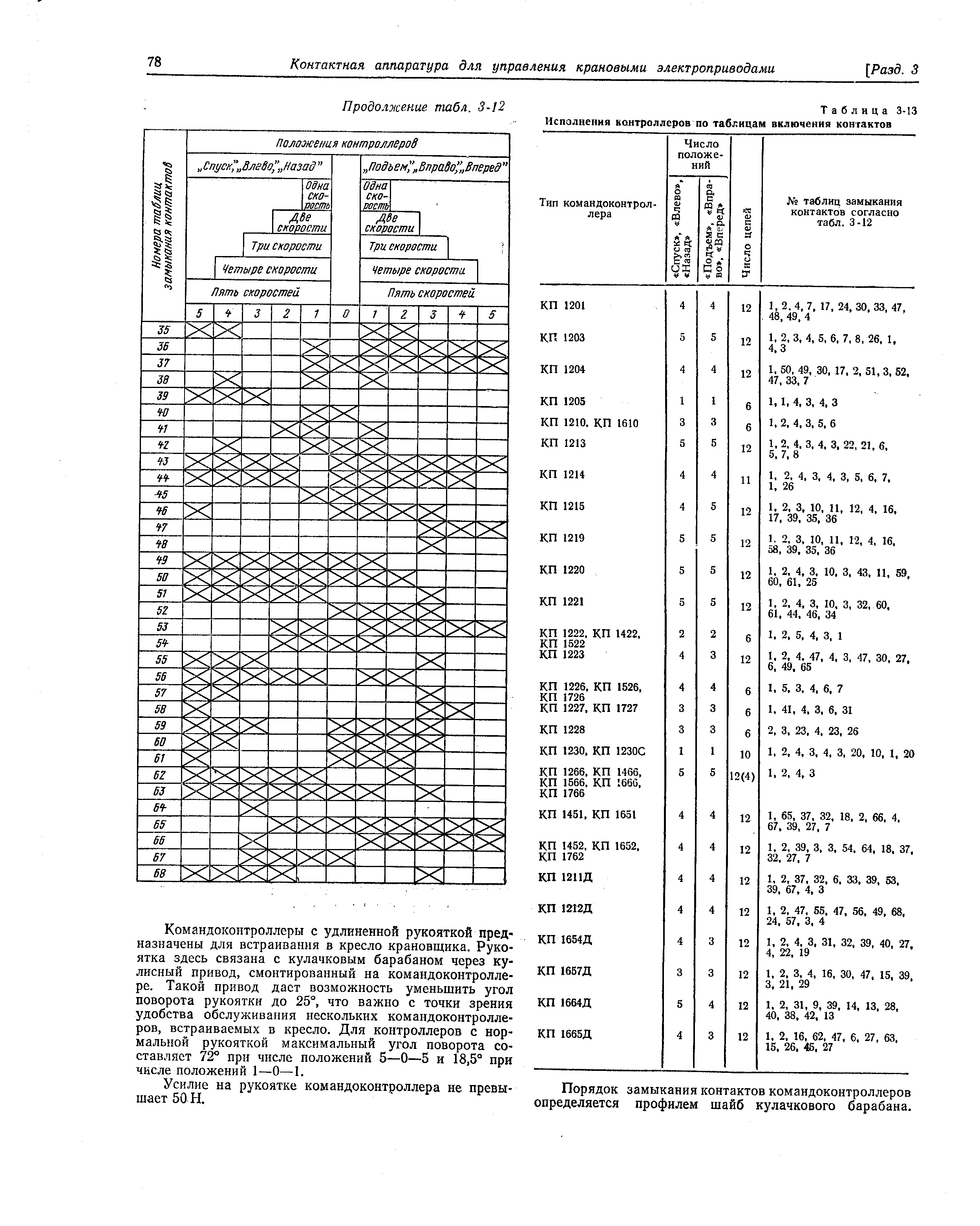 |
Нормализация БД. Характеристики реляционной БД во многом зависят от организации таблиц. Если число кортежей определяется конкретным наполнением БД, то распределение атрибутов по таблицам, определение количества таблиц, включение дополнительных атрибутов и другие вопросы решаются при организации БНД. От их решения зависят затраты памяти и времени на поиск, удобство пополнения БД новыми отношениями и данными. [c.275]
Два крайних положения, соответствующие последовательному С и параллельному П соединению двигателей, получаются при впуске сжатого воздуха в камеру А или Б цилиндра I или П. Среднее положение, соответствующее последовательно-параллельному СП соединению двигателей, получается при впуске сжатого воздуха в камеры В и Г. Как видно из таблицы включения вентилей, необходима такая последовательность на позиции С все вентили выключены, на позиции СП включены вентили 7, 2, и на позиции П — 1 я 4. [c.37]
Приведенная таблица этих значений показывает, что для большинства металлов (в таблицу включен также и Не , являющийся в жидком состоянии вырожденной ферми-системой) эффективная масса т порядка электронной (крайние случаи приведены хшя демонстрации максимально возможных отклонений). [c.164]
Последовательность включения реостатных контакторов для обоих напряжений в контактной сети одинакова. Работа силовой схемы подробно здесь не рассматривается желающие могут разобрать её по изложенному выше описанию, пользуясь таблицами включения контакторов. [c.398]
Щж наличии сжатого воздуха в главных резервуарах и резервуаре управления давление не ииже 5 кгс/с машинист включает рубильник аккумуляторной батареи, автоматические выключатели Управление , Масляный насос , Прожектор , “Освещение буферных фонарей , “Освещение тепловоза , ставит рукоятку переключателя управления в положение “Один тепловоз , отключатели тяговых двигателей в положение “Включено , реверсивную рукоятку контроллера машиниста в положение “Вперед , затем поворотом ключа включает автостоп и нажимает рукой кнопку блокировки открытой двери аппаратной камеры. После этого машинист, переводя главную рукоятку контроллера по позициям, проверяет включение аппаратов, последовательность срабатывания которых должна соответствовать таблице включений. [c.249]
Тактом релейного устройства называют интервал времени между двумя соседними изменениями его полного состояния. Графическое изображение последовательности изменений полного состояния релейного устройства называют таблицей включений или тактогрпм.иой и часто совмещают с циклограммой. [c.601]
Выписать условия работы системы в виде таблицы соответ- Tnjii i значений входа и выхода (таблицы логических условий), таблицы включений, или тактограммы. [c.602]
Для синтеза последовательностной (многотактной) системы управления необходимо построить тактограмму машины с указанием наличия или отсутствия сигналов от конечных выключателей в начале каждого такта движения, проверить реализуемость тактограммы, в случае необходимости определить число элементов памяти и выбрать такты для их включения и выключения, составить таблицу включений с указанием тактирующих сигналов, рабочих, запрещенных и безразличных состояний, получить исходные формулы включения и упростить их. На основании выполненного синтеза построить функциональную и принципиальную схему управления на пневматических или электромагнитных элементах и проверить ее действие. [c.200]
При составлении таблицы включений систем управления с элементами памяти необходимо иметь в виду, что сначала изменяется комбинация сигналов от конечных выключателей, а затем включается или выключается элемент памяти. Например, для тактограм-мы (рис. 140) в начале второго такта движения сначала появляется набор (Х)=0, Х2=1, Хз=1, 2 = 0), вызывающий включение памяти, а уже затем появляется набор (л = 0, Х2=1, Хз=1, 2=1), вызывающий обратный ход механизма М1. Отсюда следует, что число различных наборов входных сигналов (число состояний) в системах управления с памятью больще числа тактов движения. Поэтому будем различать такты движения и логические такты. Логическим тактом называется промежуток времени, в течение которого не меняется состояние ни одного из логических элементов, включая II элементы памяти. Логические такты и наборы входных [c.251]
В нашем примере таблица включений (табл. 9) содержит 8 состояний (логических тактов) при 6 тактах движения, так как в начале тактов движения 2 и 6 имеется по два логических такта 2а (включение элемента памяти), 26 (сигнал к обратному ходу механизма М/) и 6а (выключение элемента памяти), 66 (сигнал к обратному ходу механизма М3). Верхняя часть таблицы включения повторяет входные сигналы, указанные ранее при определении реализуемости тактограммы. Нижняя часть таблицы содержит сигналы на включение /г и выключение fг элемента памяти, а также выходные сигналы к движению исполнительных органов механизмов М1, М2 и М3 вперед (по тактограмме — вверх) и назад . Сигналы вперед обозначены через /ь /г, г, сигналы назад — через [c.252]
Указанные условия разделения всех изделий на три группы представляют собой программу действия системы управления тремя механизмами М1, М2 и М3 от двух выключателей и могут быть представлены в виде таблицы включений (рис. 144, б). Такую же таблицу включений имеют и некоторые другие однотактные системы управления. На рис. 144, в показана принципиальная схема управления механизмами подачи изделий, обрабатываемых машинами-автоматами А1 и А2, в большой бункер Б1 ев малый Б2. Если работают оба автомата (х] = 1, Х2=1), то изделия направляются посредством механизма М1 в бункер Б1 (выходной сигнал р). Если работает только автомат А1 (х = 1, Х2 = 0), то изделия направлякзтся механизмом М2 в бункер Б2 (выходной сигнал 2). При неработающих [c.259]
Цикловое управление используется на тех роботах, которые предназначены для подъемно-транспортных операций, связанных с об-, служпванием металлорежущих станков, прессов, молотов и т. п. Входные сигналы подаются в блок управления от путевых (иначе конечных) выключателей, на которые нажимают сменные упоры, установленные на подвижных звеньях манипулятора. Вместо сменных упоров могут быть использованы передвижные магниты. Одновременно для точной фиксации устанавливаются фиксирующие упоры, жестко определяющие конец перемещения по каждой координате. Для реализации циклового управления применяется релейная схема, так как все входные и выходные сигналы управления имеют только по два значения. Построение релейной схемы управления по значениям этих сигналов производится по таблице включений и ничем не отличается от построений, изложенных в 30. [c.271]
При составлении таблицы включений систем управления с элементами памяти необходимо иметь в виду, что сначала изменяется комбинация сигналов от конечных выключателей, а затем включается или выключается элемент памяти. Например, для тактограммы, показ.анной на рис. 197, в начале второго такта движения сначала появляется набор (.<1 =0, xi = 1, Кг = I, 2 = 0), вызывающий включение памяти, а уже затем появляется набор (xi О, Х2 = I, Хз= I, Z = I), вызывающий обратный ход механизма Ml. Отсюда следует, что число различных набэ-. [c.533]
В течение этого периода был разработан язык таблиц включения для записи условий работы многотактных релейных устройств и равносильности для преобразования структур при заданной последовательности действия элементов предложен новый язык и разработана система равносильностей для преобразования структур (в том числе мостиковых) с различным образом замкнутыми и разомкнутыми соединениями разработан метод синтеза мостиковых структур при помощи выделения начальных и конечных эле- [c.250]
Технические данные КК серии ККП 1000 приведены в табл. II. 1.31. Сель-синные КК используются в бесконтактных системах регулирования и для управления грузовыми магнитами выполняются с выходом на постоянном и переменном токе (рис. И.1.38). Таблицы включения контактов КК приведены в каталоге 07.52.02—81 .Командоконтроллеры крановые серии ККП 1000 , [c.283]
Введение элементов памяти продолжают до тех пор, пока любой комбинации основных входных сигналов Xi, Хо, х ) и дополнительных входных сигналов t/i, у ,. .., у ) не будет соответствовать одно значение выхода, ибо только в последнем случае таблица включений, или тактограмма, реализуема. В частности, такто-грамма, приведенная выше (см. таблицу 14), реализуема. [c.604]
Таблица включений основных элементов гидравлической схемы приведена на рис. 133. Знак + соответствует положению поршня гидроцилиндров 5—12 клапанов и запорного конуса, при котором они открыты гидроцилиндр 13 перемещается вниз и производит срез осадка поршень гидроцилиндра 14 повернул нож в положение среза гидроцилиндр 16 фрикционной муфты включен гидравлические конечные выключатели 3(1) — 3 (7) нажгты распределители 2 (1) — 2 (5) включены. Знаку О соответствует противоположное состояние перечисленных элементов. [c.206]
Если частота вращенця дизеля по позициям контроллера не соответствует установленной, то необходимо отрегулировать частоту вращения. Регулируют при снятом колпаке и установленной фишке штепсельного разъема пробками А электромагнитов MPJ МР2, МРЗ пробкой Б электромагнита МР4 и гайкой Л (рис. 90). Таблица включения электромагнитов и соответствующее положение контроллера приведены в табл. 8. [c.130]
При решении задачи синтеза определяются условия работы Р. у. путем изучения подлежащего автоматизации технологич. процесса затем формулируются (обычно в виде словесного описания) завмстмости между требуемой последовательностью значений выходных сигналов и заданной последопательгюстью значений сигналов на входах. Полученное словесное задание записывается в форме к.-л, таблиц (напр., таблиц включений или переходов) [1, 2], [c.417]
Существуют два основных способа введения элементов обратной связи. При первом способе [41] берется нереализуемая система с одним внутренним состоянием, т. е. без элементов памяти, а затем производится увеличение числа ее внутренних состояний до тех пор, пока она не станет реализуемой. Введение элементов обратной связи таким способом осуществляется посредством таблицы включений. При втором способе берется заведомо реализуемая система с каким-то числом внутренних состояний, а затем производится сокращение числа внутренних состояний. Это осуществляется посредством сжатия так называемой таблицы переходов, предложенной американским исследователем Хафмэном [115]. Первый способ введения элементов памяти не всегда дает получение их минимального числа. Кроме того, таблицы включений могут быть практически использованы только в том случае, когда задается не более двух-трех последовательностей состояний входа и выхода, причем для каждой составляется отдельная таблица включений. [c.307]
Таблица включения контакторов и защитных элементов на электропоезде ЭР22 [c.278]
c.251
]
Пневматические приводы (1969) — [
c.307
]
Таблица – включение
Cтраница 1
Таблица включений состоит из отдельных этапов, которые отличаются состоянием приемных реле. Этапы, на которых происходит изменение состояния промежуточных реле, подразделяются на такты, соответствующие различным состояниям этих реле. Так, если промежуточное реле срабатывает на каком-либо этапе, то этот этап делится на два такта.
[1]
Таблица включения, характеризующая работу станка по вышеописанному циклу, изображена на рис. 11, о. При переходе от одного такта к другому меняется состояние хотя бы одного из электрических элементов. Знаком обозначается включение элемента ( попадание под напряжение катушки реле, пускателя, электромагнита или нажатие кнопки управления или конечного выключателя), а знаком – – их выключение. Нулевой такт характеризует состояние всех элементов в начале цикла.
[2]
Таблица включения для параллельно-последовательного цикла изображена на рис. 11, б; из нее видно, что в тактах 8, 9, 10 и 11 одновременно работают несколько исполнительных элементов, а в остальных тактах работает только по одному элементу.
[3]
Таблица включения с проставленными таким образом весами элементов и состояний приведена на рис. 12 а. Из нее видно, что повторяющихся цифр, характеризующих веса состояний, нет и, следовательно, цикл, описанный данной таблицей включения, может быть реализован без применения цикловых промежуточных элементов.
[4]
Таблица включения, в которую для реализации цикла введены вышеописанным способом промежуточные элементы, называется общей таблицей включения схемы.
[5]
Таблица включений представляет собой таблицу. Каждое изменение состояния какого-либо элемента или одновременное изменение состояния нескольких элементов носит название такта работы схемы. Непрерывный ряд тактов, в течение которого какой-либо элемент схемы находится во включенном состоянии, называется периодом включения этого элемента, а непрерывный ряд тактов, в течение которого элемент находится в отключенном состоянии, – периодом отключения этого элемента.
[6]
Таблица включений, выполненная так, как указано выше, позволяет непосредственно найти общие решения для выходов и промежуточных реле. Соответствующие выражения могут быть получены как сумма конститу-ентов ( набор номеров) тех состояний, в которых цепь должна быть замкнута ( в таблице включений обозначаются сплошной чертой для выходных цепей и знаками – и для промежуточных реле) или может быть замкнута ( отмечены пунктиром), причем последние берутся как условные. В качестве условных могут быть взяты и конституенты, соответствующие неиспользуемым состояниям.
[7]
Составляетсяреализуемая таблица включений, для чего сначала вносятся в нее все требуемые по условиям последовательности входных и выходных сигналов и по этим условиям определяется число и порядок работы промежуточных реле.
[8]
Из таблицы включений, так же, как из таблицы истинности, мы могли бы определить как СДНФ, так и СКНФ, но так как получать СДНФ более удобно, то будем из таблицы включений получать только СДНФ, а СКНФ определять по СДНФ по правилам, рассмотренным в гл. Очевидно, что, как было отмечено в предыдущей главе, от реализуемой таблицы включений можно было – бы перейти к таблице соответствия однотактного эквивалента такой многотактной схемы.
[9]
Из таблицы включения рис. 11, а видно, что в каждом такте срабатывает всего один элемент. Цикл, соответствующий такой таблице включения, называется последовательным циклом.
[10]
Из таблицы включений находятся формулы работы для отдельных исполнительных цепей ( выходных сигналов) и промежуточных элементов.
[11]
Из таблицы включений, записанной указанным выше способом, можно видеть, какие такты соответствуют устойчивым состояниям, а какие – неустойчивым.
[12]
Из таблицы включений могут быть найдены выражения для любой исполнительной цепи в виде суммы обязательных консти-туентов, соответствующих тем состояниям ( тактам), в которых данная цепь должна быть замкнута ( отмечены в таблице сплош – 1ной линией), и условных конституентов, соответствующих состояниям, в которых цепь может быть замкнута ( отмечены пунктиром), или неиспользуемым состояниям.
[13]
Использование таблиц включения в качестве исходного материала для составления алгоритма управления, выражаемого в терминах алгебры логики, оказывается не всегда возможным. Применение этих таблиц оправдано тогда, когда зависимость между сигналами относительно проста. При большом числе независимых переменных указанный метод становится неудобным, так как составление таблиц связано с перебором всех возможных сочетаний значений аргументов.
[15]
Страницы:
1
2
3
4
Циклограмма показывает последовательность
включения рабочих органов машины.
Состояния рабочих органов в установившемся
режиме изображают на циклограмме горизонтальными линиями. Для каждого рабочего
органа, а также для каждого элемента памяти проводится своя линия [5, 7].
Переход от одного состояния к другому
происходит почти мгновенно, поэтому он на циклограмме изображается вертикальной
линией.
Таким образом, вертикальные линии
соответствуют моментам изменения входных сигналов. Расстояние между соседними
вертикальными линиями на циклограмме
есть такт работы дискретного автомата.
По циклограмме легко определить суммарные
веса входных переменных в каждом такте. С этой целью входным переменным
(каналам) в порядке сверху вниз приписывают веса 20, 21, 22,…
2n и в каждом такте вес канала умножают на
значение сигнала в нем, т.е. на 0
или на 1 , а полученные величины суммируют.
Построение циклограммы рассмотрим на примере
относительно простой схемы, которая управляет двумя гидравлическими
цилиндрами Х и Y, обслуживающими участок автоматической линии
(рис. 5.2).
Цилиндры работают в следующей последовательности: X, Y, Y (с отрицанием – палка горизонтальная над буквой), Х (с отрицанием).
Каждое последующее действие начинается только после окончания
предыдущего. Сначала включается цилиндр Х
и его шток, связанный с устройством, которое зажимает обрабатываемую
деталь на рабочей позиции, идет вперед. После окончания его хода включается
цилиндр Y, шток которого соединен со сверлильной
головкой. После завершения обработки отверстий сверлильная головка возвращается
в исходное положение, а затем возвращается и шток цилиндра Х ,
освобождая деталь.

Рис. 5.2. Схема управления двумя
гидроцилиндрами
Для контроля положений
штоков цилиндров служат путевые переключатели
А1, А2 и В1, В2 . Сигналы с этих переключателей (а1, а2 и b1, b2) являются
переменными дискретного автомата (рис. 5.3).
К выходу дискретного автомата подключены выходные элементы памяти
(триггеры), с которых поступают выходные сигналы (переменные) х и у.
Они через усилители (на схеме не показано) управляют электрогидравлическими
кранами цилиндров Х и Y.
Значения логических функций
на включение и
на выключение выходных элементов памяти зависят от состояний дискретного
автомата.
Рассмотрим
последовательность включений и выключений входных и выходных переменных в каждом
такте.

Рис. 5.3.
Схема внешних связей дискретного автомата
Последовательная
запись изменения состояний входных и выходных переменных называется таблицей включений.
3) Начинают запись алгоритма, отмечая изменение выходной переменной в
первом такте (в нашем примере FX = 1). При этом вначале строка состояния входной
переменной в первом такте остается пустой. В эту строку записывают последнее
изменение одной из входных переменных в конце цикла.
