Метод множителей Лагранжа, применяемый для решения задач математического программирования (в частности, линейного программирования) — метод нахождения условного экстремума функции  , где
, где  , относительно
, относительно  ограничений
ограничений  , где
, где  меняется от единицы до .
меняется от единицы до .
Описание метода[править | править код]

- где .


Обоснование[править | править код]
Нижеприведенное обоснование метода множителей Лагранжа не является его строгим доказательством. Оно содержит эвристические рассуждения, помогающие понять геометрический смысл метода.
Двумерный случай[править | править код]
Пусть требуется найти экстремум функции  при условии, заданном уравнением
при условии, заданном уравнением  .
.
Будем считать, что
- 1) функция непрерывно дифференцируема,
- 2) функция непрерывно дифференцируема, с частными производными, не равными нулю одновременно, то есть уравнение задаёт гладкую кривую из обыкновенных точек на плоскости .
- 3) кривая не проходит через точки, в которых градиент обращается в .

Нарисуем на плоскости  линии уровня функции
линии уровня функции  (то есть кривые
(то есть кривые  ). Из геометрических соображений следует, что точкой (возможно — точками) условного экстремума функции может быть только точка касания кривой
). Из геометрических соображений следует, что точкой (возможно — точками) условного экстремума функции может быть только точка касания кривой  и некоторой линии уровня, то есть точкой, в которой касательная к и касательная к этой линии уровня — совпадают. Действительно, если в некоторой точке
и некоторой линии уровня, то есть точкой, в которой касательная к и касательная к этой линии уровня — совпадают. Действительно, если в некоторой точке  кривая пересекает линию уровня
кривая пересекает линию уровня  трансверсально (то есть под некоторым ненулевым углом), то при движении по кривой из точки можно попасть как на линии уровня, соответствующие значению, большему
трансверсально (то есть под некоторым ненулевым углом), то при движении по кривой из точки можно попасть как на линии уровня, соответствующие значению, большему  , так и на линии уровня, соответствующие значению, меньшему . Следовательно, такая точка не может быть точкой экстремума.
, так и на линии уровня, соответствующие значению, меньшему . Следовательно, такая точка не может быть точкой экстремума.
Тем самым, необходимым условием экстремума в рассматриваемом случае будет совпадение касательных. Чтобы записать его в аналитической форме, заметим, что оно эквивалентно параллельности градиентов функций и  в данной точке, поскольку вектор градиента перпендикулярен касательной к линии уровня. Это условие выражается в следующей форме:
в данной точке, поскольку вектор градиента перпендикулярен касательной к линии уровня. Это условие выражается в следующей форме:

где  — некоторое число, отличное от нуля, и являющееся множителем Лагранжа.
— некоторое число, отличное от нуля, и являющееся множителем Лагранжа.
Рассмотрим теперь функцию Лагранжа , зависящую от  и :
и :

Необходимым условием её экстремума является равенство нулю градиента  . В соответствии с правилами дифференцирования оно записывается в виде
. В соответствии с правилами дифференцирования оно записывается в виде

В полученной системе первые два уравнения эквивалентны необходимому условию локального экстремума (1), а третье — уравнению . Из неё можно найти  . При этом
. При этом  , поскольку в противном случае градиент функции обращается в нуль в точке
, поскольку в противном случае градиент функции обращается в нуль в точке  , что противоречит предположениям.
, что противоречит предположениям.
Замечание. Найденные таким способом точки могут и не являться точками условного экстремума — записанное дифференциальное условие носит необходимый, но не достаточный характер.
Вышеприведённые рассуждения о нахождении условного экстремума с помощью вспомогательной функции  составляют
составляют
основу метода множителей Лагранжа и обобщаются на случай произвольного числа переменных и уравнений, задающих условия.
На основе метода множителей Лагранжа можно получить достаточные условия условного экстремума, требующие анализа (в простейшем случае) вторых производных функции Лагранжа .
Применение[править | править код]
- Метод множителей Лагранжа применяется при решении задач нелинейного программирования, возникающих во многих областях (например, в экономике).
- Основной метод решения задачи об оптимизации качества кодирования аудио и видео информации при заданном среднем битрейте (см. Оптимизация искажений (англ.) (рус.).
См. также[править | править код]
- Математическое программирование
- Линейное программирование
- Условия Каруша — Куна — Таккера
Литература[править | править код]
- Акулич И.Л. Глава 3. Задачи нелинейного программирования // Математическое программирование в примерах и задачах. — М.: Высшая школа, 1986. — 319 с. — ISBN 5-06-002663-9..
- Зорич В. А. Математический анализ. Часть 1. — изд. 2-е, испр. и доп. — М.: ФАЗИС, 1997.
- Протасов В. Ю. Максимумы и минимумы в геометрии. — М.: МЦНМО. — 56 с. — (Библиотека «Математическое просвещение», выпуск 31).
Приветствую Вас, уважаемые Читатели! В школе каждый из Вас сталкивался с экстремальными задачами на поиск минимумов и максимумов. Все, так или иначе, научились находить производные, приравнивать их к нулю и анализировать полученные точки.

Но что, если мы имеем, например, функцию двух переменных, да еще и с ограничениями, заданными неявно. Например, требуется исследовать на экстремумы следующую конструкцию:
Конечно, можно пытаться выразить одну переменную через другую, но тогда получится не совсем красивая функция, с которой лень возиться. К счастью, у нас есть возможность использовать замечательный метод множителей Лагранжа. Давайте рассмотрим его, так сказать, на пальцах. Для начала запишем следующую вспомогательную функцию:
Теперь необходимо найти частные производные и решить систему уравнений:
Теперь при полученных значениях множителя находим точки, которые будем исследовать дополнительно:
Точки, найденные нами называются стационарными, а дальнейшие изыскания связаны с вычислением знака второй производной функции F в этих точках. Простейшая запись этих условий сводится к вычислению определителя:
Подставляем и вычисляем определитель в общем виде, что значительно удобнее:
Теперь, если определитель больше нуля, мы получим точку максимума, в обратном случае – минимум:
Вычисляем значения функции в найденных экстремальных точках:
Теперь посмотрим на геометрическую интерпретацию:
Как видно из рисунка, нужно найти наибольшее и наименьшее значение аппликаты плоскости z=x+2y для точек ее пересечения с цилиндром. Спасибо за внимание!
- TELEGRAM и Вконтакте– там я публикую не только интересные статьи, но и математический юмор и многое другое!
Функция Лагранжа и метод множителей Лагранжа
Краткая теория
Метод множителей Лагранжа является классическим методом
решения задач математического программирования (в частности выпуклого). К
сожалению, при практическом применении метода могут встретиться значительные
вычислительные трудности, сужающие область его использования. Мы рассматриваем
здесь метод Лагранжа главным образом потому, что он является аппаратом, активно
используемым для обоснования различных современных численных методов, широко
применяемых на практике. Что же касается функции Лагранжа и множителей
Лагранжа, то они играют самостоятельную и исключительно важную роль в теории и
приложениях не только математического программирования.
Рассмотрим классическую задачу оптимизации:
Среди ограничений этой задачи нет
неравенств, нет условий неотрицательности переменных,
их дискретности,
и функции
и
непрерывны и имеют частные производные
по крайней мере второго порядка.
Классический подход к решению задачи дает систему уравнений
(необходимые условия), которым должна удовлетворять точка
,
доставляющая функции
локальный экстремум на множестве точек, удовлетворяющих
ограничениям (для задачи выпуклого программирования найденная точка
будет одновременно и точкой глобального
экстремума).
Предположим, что в точке
функция (1) имеет локальный условный экстремум
и ранг матрицы
равен
.
Тогда необходимые условия запишутся в виде:
где
есть функция Лагранжа;
–
множители Лагранжа.
Существуют также и достаточные условия, при выполнении
которых решение системы уравнений (3) определяет точку экстремума функции
.
Этот вопрос решается на основании исследования знака второго дифференциала
функции Лагранжа. Однако достаточные условия представляют главным образом
теоретический интерес.
Можно указать следующий порядок решения задачи (1), (2)
методом множителей Лагранжа:
1) составить функцию Лагранжа (4);
2) найти частные производные функции Лагранжа по всем
переменным
и приравнять их
нулю. Тем самым будет получена система (3,
состоящая из
уравнений. Решить полученную
систему (если это окажется возможным!) и найти таким
образом все стационарные точки функции Лагранжа;
3) из стационарных точек, взятых без координат
выбрать точки, в которых функция
имеет условные локальные экстремумы при
наличии ограничений (2). Этот выбор осуществляется, например, с применением
достаточных условий локального экстремума. Часто исследование упрощается, если использовать конкретные условия задачи.
Пример решения задачи
Задача
Фирма
реализует автомобили двумя способами: через магазин и через торговых агентов.
При реализации
автомобилей через магазин расходы на
реализацию составляют
у.е., а при продаже
автомобилей через торговых агентов расходы
составляют
у.е. Найти оптимальный способ реализации
автомобилей, минимизирующий суммарные расходы, если общее число предназначенных
для продажи автомобилей составляет 200 штук.
Решение
На сайте можно заказать решение контрольной или самостоятельной работы, домашнего задания, отдельных задач. Для этого вам нужно только связаться со мной:
ВКонтакте
WhatsApp
Telegram
Мгновенная связь в любое время и на любом этапе заказа. Общение без посредников. Удобная и быстрая оплата переводом на карту СберБанка. Опыт работы более 25 лет.
Подробное решение в электронном виде (docx, pdf) получите точно в срок или раньше.
Составим
математическую модель задачи.
Пусть
и
– число автомобилей, реализуемых первым и
вторым способом.
Целевая
функция
(суммарные
издержки минимизируются).
Ограничения
задачи:
Математическая
модель задачи имеет вид:
Для
решения задачи применим метод множителей Лагранжа.
Функция
Лагранжа имеет вид:
Найдем
частные производные по
и
и приравняем их к нулю. Получим следующую
систему уравнений:
Решая
систему, найдем:
Составим
определитель из частных производных 2-го порядка для функции
по
и
:
Следовательно,
в силу достаточного условия существования условного экстремума, функция
в точке
имеет экстремум.
Так как
, то в полученной точке
функция
имеет условный минимум.
Итак,
оптимальное решение:
Экстремальное значение целевой функции:
Ответ: Нужно продать 99 автомобилей через магазин и 101
автомобиль через торговых агентов, при этом расходы минимизируются и составляют
20398 у.е.
Условный экстремум. Метод множителей Лагранжа. Первая часть.
Для начала рассмотрим случай функции двух переменных. Условным экстремумом функции $z=f(x,y)$ в точке $M_0(x_0;y_0)$ называется экстремум этой функции, достигнутый при условии, что переменные $x$ и $y$ в окрестности данной точки удовлетворяют уравнению связи $varphi (x,y)=0$.
Название «условный» экстремум связано с тем, что на переменные наложено дополнительное условие $varphi(x,y)=0$. Если из уравнения связи можно выразить одну переменную через другую, то задача определения условного экстремума сводится к задаче на обычный экстремум функции одной переменной. Например, если из уравнения связи следует $y=psi(x)$, то подставив $y=psi(x)$ в $z=f(x,y)$, получим функцию одной переменной $z=fleft(x,psi(x)right)$. В общем случае, однако, такой метод малопригоден, поэтому требуется введение нового алгоритма.
Метод множителей Лагранжа для функций двух переменных.
Метод множителей Лагранжа состоит в том, что для отыскания условного экстремума составляют функцию Лагранжа: $F(x,y)=f(x,y)+lambdavarphi(x,y)$ (параметр $lambda$ называют множителем Лагранжа). Необходимые условия экстремума задаются системой уравнений, из которой определяются стационарные точки:
$$
left { begin{aligned}
& frac{partial F}{partial x}=0;\
& frac{partial F}{partial y}=0;\
& varphi (x,y)=0.
end{aligned} right.
$$
Достаточным условием, из которого можно выяснить характер экстремума, служит знак $d^2 F=F_{xx}^{”}dx^2+2F_{xy}^{”}dxdy+F_{yy}^{”}dy^2$. Если в стационарной точке $d^2F > 0$, то функция $z=f(x,y)$ имеет в данной точке условный минимум, если же $d^2F < 0$, то условный максимум.
Есть и другой способ для определения характера экстремума. Из уравнения связи получаем: $varphi_{x}^{‘}dx+varphi_{y}^{‘}dy=0$, $dy=-frac{varphi_{x}^{‘}}{varphi_{y}^{‘}}dx$, поэтому в любой стационарной точке имеем:
$$d^2 F=F_{xx}^{”}dx^2+2F_{xy}^{”}dxdy+F_{yy}^{”}dy^2=F_{xx}^{”}dx^2+2F_{xy}^{”}dxleft( -frac{varphi_{x}^{‘}}{varphi_{y}^{‘}}dxright)+F_{yy}^{”}left( -frac{varphi_{x}^{‘}}{varphi_{y}^{‘}}dxright)^2=\
=-frac{dx^2}{left(varphi_{y}^{‘} right)^2}cdotleft( -(varphi_{y}^{‘})^2 F_{xx}^{”}+2varphi_{x}^{‘}varphi_{y}^{‘}F_{xy}^{”}-(varphi_{x}^{‘})^2 F_{yy}^{”} right)$$
Второй сомножитель (расположенный в скобке) можно представить в такой форме:
$$
H=left| begin{array} {ccc}
0 & varphi_{x}^{‘} & varphi_{y}^{‘}\
varphi_{x}^{‘} & normred{F_{xx}^{”}} & normred{F_{xy}^{”}} \
varphi_{y}^{‘} & normred{F_{xy}^{”}} & normred{F_{yy}^{”}} end{array} right|
$$
Красным цветом выделены элементы определителя $left| begin{array} {cc} F_{xx}^{”} & F_{xy}^{”} \ F_{xy}^{”} & F_{yy}^{”} end{array} right|$, который является гессианом функции Лагранжа. Если $H > 0$, то $d^2F < 0$, что указывает на условный максимум. Аналогично, при $H < 0$ имеем $d^2F > 0$, т.е. имеем условный минимум функции $z=f(x,y)$.
Примечание относительно формы записи определителя $H$. показатьскрыть
Алгоритм исследования функции двух переменных на условный экстремум
- Составить функцию Лагранжа $F(x,y)=f(x,y)+lambdavarphi(x,y)$
- Решить систему $
left { begin{aligned}
& frac{partial F}{partial x}=0;\
& frac{partial F}{partial y}=0;\
& varphi (x,y)=0.
end{aligned} right.$ - Определить характер экстремума в каждой из найденных в предыдущем пункте стационарных точек. Для этого применить любой из указанных способов:
- Составить определитель $H$ и выяснить его знак
- С учетом уравнения связи вычислить знак $d^2F$
Метод множителей Лагранжа для функций n переменных
Допустим, мы имеем функцию $n$ переменных $z=f(x_1,x_2,ldots,x_n)$ и $m$ уравнений связи ($n > m$):
$$varphi_1(x_1,x_2,ldots,x_n)=0; ; varphi_2(x_1,x_2,ldots,x_n)=0,ldots,varphi_m(x_1,x_2,ldots,x_n)=0.$$
Обозначив множители Лагранжа как $lambda_1,lambda_2,ldots,lambda_m$, составим функцию Лагранжа:
$$F(x_1,x_2,ldots,x_n,lambda_1,lambda_2,ldots,lambda_m)=f+lambda_1varphi_1+lambda_2varphi_2+ldots+lambda_mvarphi_m$$
Необходимые условия наличия условного экстремума задаются системой уравнений, из которой находятся координаты стационарных точек и значения множителей Лагранжа:
$$left{begin{aligned}
& frac{partial F}{partial x_i}=0; (i=overline{1,n})\
& varphi_j=0; (j=overline{1,m})
end{aligned} right.$$
Выяснить, условный минимум или условный максимум имеет функция в найденной точке, можно, как и ранее, посредством знака $d^2F$. Если в найденной точке $d^2F > 0$, то функция имеет условный минимум, если же $d^2F < 0$, – то условный максимум. Можно пойти иным путем, рассмотрев следующую матрицу:

Определитель матрицы
$$left| begin{array} {ccccc} frac{partial^2F}{partial x_{1}^{2}} & frac{partial^2F}{partial x_{1}partial x_{2}} & frac{partial^2F}{partial x_{1}partial x_{3}} &ldots & frac{partial^2F}{partial x_{1}partial x_{n}}\
frac{partial^2F}{partial x_{2}partial x_1} & frac{partial^2F}{partial x_{2}^{2}} & frac{partial^2F}{partial x_{2}partial x_{3}} &ldots & frac{partial^2F}{partial x_{2}partial x_{n}}\
frac{partial^2F}{partial x_{3} partial x_{1}} & frac{partial^2F}{partial x_{3}partial x_{2}} & frac{partial^2F}{partial x_{3}^{2}} &ldots & frac{partial^2F}{partial x_{3}partial x_{n}}\
ldots & ldots & ldots &ldots & ldots\
frac{partial^2F}{partial x_{n}partial x_{1}} & frac{partial^2F}{partial x_{n}partial x_{2}} & frac{partial^2F}{partial x_{n}partial x_{3}} &ldots & frac{partial^2F}{partial x_{n}^{2}}\
end{array} right|,$$
выделенной в матрице $L$ красным цветом, есть гессиан функции Лагранжа. Используем следующее правило:
- Если знаки угловых миноров $H_{2m+1},; H_{2m+2},ldots,H_{m+n}$ матрицы $L$ совпадают с знаком $(-1)^m$, то исследуемая стационарная точка является точкой условного минимума функции $z=f(x_1,x_2,x_3,ldots,x_n)$.
- Если знаки угловых миноров $H_{2m+1},; H_{2m+2},ldots,H_{m+n}$ чередуются, причём знак минора $H_{2m+1}$ совпадает с знаком числа $(-1)^{m+1}$, то исследуемая стационарная точка является точкой условного максимума функции $z=f(x_1,x_2,x_3,ldots,x_n)$.
Пример №1
Найти условный экстремум функции $z(x,y)=x+3y$ при условии $x^2+y^2=10$.
Решение
Геометрическая интерпретация данной задачи такова: требуется найти наибольшее и наименьшее значение аппликаты плоскости $z=x+3y$ для точек ее пересечения с цилиндром $x^2+y^2=10$.
Выразить одну переменную через другую из уравнения связи и подставить ее в функцию $z(x,y)=x+3y$ несколько затруднительно, поэтому будем использовать метод Лагранжа.
Обозначив $varphi(x,y)=x^2+y^2-10$, составим функцию Лагранжа:
$$
F(x,y)=z(x,y)+lambda varphi(x,y)=x+3y+lambda(x^2+y^2-10);\
frac{partial F}{partial x}=1+2lambda x; frac{partial F}{partial y}=3+2lambda y.
$$
Запишем систему уравнений для определения стационарных точек функции Лагранжа:
$$
left { begin{aligned}
& 1+2lambda x=0;\
& 3+2lambda y=0;\
& x^2+y^2-10=0.
end{aligned} right.
$$
Если предположить $lambda=0$, то первое уравнение станет таким: $1=0$. Полученное противоречие говорит о том, что $lambdaneq 0$. При условии $lambdaneq 0$ из первого и второго уравнений имеем: $x=-frac{1}{2lambda}$, $y=-frac{3}{2lambda}$. Подставляя полученные значения в третье уравнение, получим:
$$
left( -frac{1}{2lambda} right)^2+left( -frac{3}{2lambda} right)^2-10=0;\
frac{1}{4lambda^2}+frac{9}{4lambda^2}=10; lambda^2=frac{1}{4}; left[ begin{aligned} & lambda_1=-frac{1}{2};\ & lambda_2=frac{1}{2}. end{aligned} right.\
begin{aligned}
& lambda_1=-frac{1}{2}; ; x_1=-frac{1}{2lambda_1}=1; ; y_1=-frac{3}{2lambda_1}=3;\
& lambda_2=frac{1}{2}; ; x_2=-frac{1}{2lambda_2}=-1; ; y_2=-frac{3}{2lambda_2}=-3.end{aligned}
$$
Итак, система имеет два решения: $x_1=1;; y_1=3;; lambda_1=-frac{1}{2}$ и $x_2=-1;; y_2=-3;; lambda_2=frac{1}{2}$. Выясним характер экстремума в каждой стационарной точке: $M_1(1;3)$ и $M_2(-1;-3)$. Для этого вычислим определитель $H$ в каждой из точек.
$$
varphi_{x}^{‘}=2x;; varphi_{y}^{‘}=2y;; F_{xx}^{”}=2lambda;; F_{xy}^{”}=0;; F_{yy}^{”}=2lambda.\
H=left| begin{array} {ccc} 0 & varphi_{x}^{‘} & varphi_{y}^{‘}\ varphi_{x}^{‘} & F_{xx}^{”} & F_{xy}^{”} \ varphi_{y}^{‘} & F_{xy}^{”} & F_{yy}^{”} end{array} right|=
left| begin{array} {ccc} 0 & 2x & 2y\ 2x & 2lambda & 0 \ 2y & 0 & 2lambda end{array} right|=
8cdotleft| begin{array} {ccc} 0 & x & y\ x & lambda & 0 \ y & 0 & lambda end{array} right|
$$
В точке $M_1(1;3)$ получим:
$$H=8cdotleft| begin{array} {ccc} 0 & x & y\ x & lambda & 0 \ y & 0 & lambda end{array} right|=
8cdotleft| begin{array} {ccc} 0 & 1 & 3\ 1 & -1/2 & 0 \ 3 & 0 & -1/2 end{array} right|=40 > 0.$$
Следовательно, в точке $M_1(1;3)$ функция $z(x,y)=x+3y$ имеет условный максимум, $z_{max}=z(1;3)=10$.
Аналогично, в точке $M_2(-1;-3)$ найдем:
$$H=8cdotleft| begin{array} {ccc} 0 & x & y\ x & lambda & 0 \ y & 0 & lambda end{array} right|=
8cdotleft| begin{array} {ccc} 0 & -1 & -3\ -1 & 1/2 & 0 \ -3 & 0 & 1/2 end{array} right|=-40$$
Так как $H < 0$, то в точке $M_2(-1;-3)$ имеем условный минимум функции $z(x,y)=x+3y$, а именно: $z_{min}=z(-1;-3)=-10$.
Отмечу, что вместо вычисления значения определителя $H$ в каждой точке, гораздо удобнее раскрыть его в общем виде. Дабы не загромождать текст подробностями, этот способ скрою под примечание.
Запись определителя $H$ в общем виде. показатьскрыть
Вопрос о характере экстремума в стационарных точках $M_1(1;3)$ и $M_2(-1;-3)$ можно решить и без использования определителя $H$. Найдем знак $d^2F$ в каждой стационарной точке:
$$
d^2 F=F_{xx}^{”}dx^2+2F_{xy}^{”}dxdy+F_{yy}^{”}dy^2=2lambda left( dx^2+dy^2right)
$$
Отмечу, что запись $dx^2$ означает именно $dx$, возведённый в вторую степень, т.е. $left( dx right)^2$. Отсюда имеем: $dx^2+dy^2>0$, посему при $lambda_1=-frac{1}{2}$ получим $d^2F < 0$. Следовательно, функция имеет в точке $M_1(1;3)$ условный максимум. Аналогично, в точке $M_2(-1;-3)$ получим условный минимум функции $z(x,y)=x+3y$. Отметим, что для определения знака $d^2F$ не пришлось учитывать связь между $dx$ и $dy$, ибо знак $d^2F$ очевиден без дополнительных преобразований. В следующем примере для определения знака $d^2F$ уже будет необходимо учесть связь между $dx$ и $dy$.
Ответ: в точке $(-1;-3)$ функция имеет условный минимум, $z_{min}=-10$. В точке $(1;3)$ функция имеет условный максимум, $z_{max}=10$.
Пример №2
Найти условный экстремум функции $z(x,y)=3y^3+4x^2-xy$ при условии $x+y=0$.
Решение
Первый способ (метод множителей Лагранжа)
Обозначив $varphi(x,y)=x+y$ составим функцию Лагранжа:
$$F(x,y)=z(x,y)+lambda varphi(x,y)=3y^3+4x^2-xy+lambda(x+y).$$
$$
frac{partial F}{partial x}=8x-y+lambda; ; frac{partial F}{partial y}=9y^2-x+lambda.\
left { begin{aligned} & 8x-y+lambda=0;\ & 9y^2-x+lambda=0; \ & x+y=0. end{aligned} right.
$$
Решив систему, получим: $x_1=0$, $y_1=0$, $lambda_1=0$ и $x_2=frac{10}{9}$, $y_2=-frac{10}{9}$, $lambda_2=-10$. Имеем две стационарные точки: $M_1(0;0)$ и $M_2 left(frac{10}{9};-frac{10}{9} right)$. Выясним характер экстремума в каждой стационарной точке с использованием определителя $H$.
$$
H=left| begin{array} {ccc} 0 & varphi_{x}^{‘} & varphi_{y}^{‘}\ varphi_{x}^{‘} & F_{xx}^{”} & F_{xy}^{”} \ varphi_{y}^{‘} & F_{xy}^{”} & F_{yy}^{”} end{array} right|=
left| begin{array} {ccc} 0 & 1 & 1\ 1 & 8 & -1 \ 1 & -1 & 18y end{array} right|=-10-18y
$$
В точке $M_1(0;0)$ $H=-10-18cdot 0=-10 < 0$, поэтому $M_1(0;0)$ есть точка условного минимума функции $z(x,y)=3y^3+4x^2-xy$, $z_{min}=0$. В точке $M_2left(frac{10}{9};-frac{10}{9}right)$ $H=10 > 0$, посему в данной точке функция имеет условный максимум, $z_{max}=frac{500}{243}$.
Исследуем характер экстремума в каждой из точек иным методом, основываясь на знаке $d^2F$:
$$
d^2 F=F_{xx}^{”}dx^2+2F_{xy}^{”}dxdy+F_{yy}^{”}dy^2=8dx^2-2dxdy+18ydy^2
$$
Из уравнения связи $x+y=0$ имеем: $d(x+y)=0$, $dx+dy=0$, $dy=-dx$.
$$
d^2 F=8dx^2-2dxdy+18ydy^2=8dx^2-2dx(-dx)+18y(-dx)^2=(10+18y)dx^2
$$
Так как $ d^2F Bigr|_{M_1}=10 dx^2 > 0$, то $M_1(0;0)$ является точкой условного минимума функции $z(x,y)=3y^3+4x^2-xy$. Аналогично, $d^2F Bigr|_{M_2}=-10 dx^2 < 0$, т.е. $M_2left(frac{10}{9}; -frac{10}{9} right)$ – точка условного максимума.
Второй способ
Из уравнения связи $x+y=0$ получим: $y=-x$. Подставив $y=-x$ в функцию $z(x,y)=3y^3+4x^2-xy$, получим некоторую функцию переменной $x$. Обозначим эту функцию как $u(x)$:
$$
u(x)=z(x,-x)=3cdot(-x)^3+4x^2-xcdot(-x)=-3x^3+5x^2.
$$
Таким образом задачу о нахождении условного экстремума функции двух переменных мы свели к задаче определения экстремума функции одной переменной.
$$
u_{x}^{‘}=-9x^2+10x;\
-9x^2+10x=0; ; xcdot(-9x+10)=0;\
x_1=0; ; y_1=-x_1=0;\
x_2=frac{10}{9}; ; y_2=-x_2=-frac{10}{9}.
$$
Получили точки $M_1(0;0)$ и $M_2left(frac{10}{9}; -frac{10}{9}right)$. Дальнейшее исследование известно из курса дифференциального исчисления функций одной переменой. Исследуя знак $u_{xx}^{”}$ в каждой стационарной точке или проверяя смену знака $u_{x}^{‘}$ в найденных точках, получим те же выводы, что и при решении первым способом. Например, проверим знак $u_{xx}^{”}$:
$$u_{xx}^{”}=-18x+10;\
u_{xx}^{”}(M_1)=10;;u_{xx}^{”}(M_2)=-10.$$
Так как $u_{xx}^{”}(M_1)>0$, то $M_1$ – точка минимума функции $u(x)$, при этом $u_{min}=u(0)=0$. Так как $u_{xx}^{”}(M_2)<0$, то $M_2$ – точка максимума функции $u(x)$, причём $u_{max}=uleft(frac{10}{9}right)=frac{500}{243}$.
Значения функции $u(x)$ при заданном условии связи совпадают с значениями функции $z(x,y)$, т.е. найденные экстремумы функции $u(x)$ и есть искомые условные экстремумы функции $z(x,y)$.
Ответ: в точке $(0;0)$ функция имеет условный минимум, $z_{min}=0$. В точке $left(frac{10}{9}; -frac{10}{9} right)$ функция имеет условный максимум, $z_{max}=frac{500}{243}$.
Рассмотрим еще один пример, в котором характер экстремума выясним посредством определения знака $d^2F$.
Пример №3
Найти наибольшее и наименьшее значения функции $z=5xy-4$, если переменные $x$ и $y$ положительны и удовлетворяют уравнению связи $frac{x^2}{8}+frac{y^2}{2}-1=0$.
Решение
Составим функцию Лагранжа: $F=5xy-4+lambda left( frac{x^2}{8}+frac{y^2}{2}-1 right)$. Найдем стационарные точки функции Лагранжа:
$$
F_{x}^{‘}=5y+frac{lambda x}{4}; ; F_{y}^{‘}=5x+lambda y.\
left { begin{aligned}
& 5y+frac{lambda x}{4}=0;\
& 5x+lambda y=0;\
& frac{x^2}{8}+frac{y^2}{2}-1=0;\
& x > 0; ; y > 0.
end{aligned} right.
$$
Все дальнейшие преобразования осуществляются с учетом $x > 0; ; y > 0$ (это оговорено в условии задачи). Из второго уравнения выразим $lambda=-frac{5x}{y}$ и подставим найденное значение в первое уравнение: $5y-frac{5x}{y}cdot frac{x}{4}=0$, $4y^2-x^2=0$, $x=2y$. Подставляя $x=2y$ в третье уравнение, получим: $frac{4y^2}{8}+frac{y^2}{2}-1=0$, $y^2=1$, $y=1$.
Так как $y=1$, то $x=2$, $lambda=-10$. Характер экстремума в точке $(2;1)$ определим, исходя из знака $d^2F$.
$$
F_{xx}^{”}=frac{lambda}{4}; ; F_{xy}^{”}=5; ; F_{yy}^{”}=lambda.
$$
Так как $frac{x^2}{8}+frac{y^2}{2}-1=0$, то:
$$
dleft( frac{x^2}{8}+frac{y^2}{2}-1right)=0; ; dleft( frac{x^2}{8} right)+dleft( frac{y^2}{2} right)=0; ; frac{x}{4}dx+ydy=0; ; dy=-frac{xdx}{4y}.
$$
В принципе, здесь можно сразу подставить координаты стационарной точки $x=2$, $y=1$ и параметра $lambda=-10$, получив при этом:
$$
F_{xx}^{”}=frac{-5}{2}; ; F_{xy}^{”}=-10; ; dy=-frac{dx}{2}.\
d^2 F=F_{xx}^{”}dx^2+2F_{xy}^{”}dxdy+F_{yy}^{”}dy^2=-frac{5}{2}dx^2+10dxcdot left(-frac{dx}{2} right)-10cdot left(-frac{dx}{2} right)^2=\
=-frac{5}{2}dx^2-5dx^2-frac{5}{2}dx^2=-10dx^2.
$$
Однако в других задачах на условный экстремум стационарных точек может быть несколько. В таких случаях лучше $d^2F$ представить в общем виде, а потом подставлять в полученное выражение координаты каждой из найденных стационарных точек:
$$
d^2 F=F_{xx}^{”}dx^2+2F_{xy}^{”}dxdy+F_{yy}^{”}dy^2=frac{lambda}{4}dx^2+10cdot dxcdot frac{-xdx}{4y} +lambdacdot left(-frac{xdx}{4y} right)^2=\
=frac{lambda}{4}dx^2-frac{5x}{2y}dx^2+lambda cdot frac{x^2dx^2}{16y^2}=left( frac{lambda}{4}-frac{5x}{2y}+frac{lambda cdot x^2}{16y^2} right)cdot dx^2
$$
Подставляя $x=2$, $y=1$, $lambda=-10$, получим:
$$
d^2 F=left( frac{-10}{4}-frac{10}{2}-frac{10 cdot 4}{16} right)cdot dx^2=-10dx^2.
$$
Так как $d^2F=-10cdot dx^2 < 0$, то точка $(2;1)$ есть точкой условного максимума функции $z=5xy-4$, причём $z_{max}=10-4=6$.
Ответ: в точке $(2;1)$ функция имеет условный максимум, $z_{max}=6$.
В следующей части рассмотрим применение метода Лагранжа для функций большего количества переменных.
In mathematical optimization, the method of Lagrange multipliers is a strategy for finding the local maxima and minima of a function subject to equality constraints (i.e., subject to the condition that one or more equations have to be satisfied exactly by the chosen values of the variables).[1] It is named after the mathematician Joseph-Louis Lagrange. The basic idea is to convert a constrained problem into a form such that the derivative test of an unconstrained problem can still be applied. The relationship between the gradient of the function and gradients of the constraints rather naturally leads to a reformulation of the original problem, known as the Lagrangian function.[2]
The method can be summarized as follows: In order to find the maximum or minimum of a function  subjected to the equality constraint
subjected to the equality constraint  form the Lagrangian function,
form the Lagrangian function,

and find the stationary points of  considered as a function of
considered as a function of  and the Lagrange multiplier
and the Lagrange multiplier  This means that all partial derivatives should be zero, including the partial derivative with respect to [3]
This means that all partial derivatives should be zero, including the partial derivative with respect to [3]
- and


or equivalently
- and


The solution corresponding to the original constrained optimization is always a saddle point of the Lagrangian function,[4][5] which can be identified among the stationary points from the definiteness of the bordered Hessian matrix.[6]
The great advantage of this method is that it allows the optimization to be solved without explicit parameterization in terms of the constraints. As a result, the method of Lagrange multipliers is widely used to solve challenging constrained optimization problems. Further, the method of Lagrange multipliers is generalized by the Karush–Kuhn–Tucker conditions, which can also take into account inequality constraints of the form  for a given constant
for a given constant 
Statement[edit]
The following is known as the Lagrange multiplier theorem.[7]
Let  be the objective function,
be the objective function,  be the constraints function, both belonging to
be the constraints function, both belonging to  (that is, having continuous first derivatives). Let
(that is, having continuous first derivatives). Let  be an optimal solution to the following optimization problem such that
be an optimal solution to the following optimization problem such that  (here
(here  denotes the matrix of partial derivatives,
denotes the matrix of partial derivatives, ![{displaystyle {Bigl [}operatorname {D} g(x_{star }){Bigr ]}_{j,k}=left[{frac { partial g_{j} }{partial x_{k}}}right]{bigg )} }](https://wikimedia.org/api/rest_v1/media/math/render/svg/d4e656034f8dab7e4b30098c730df1eb74bf3e04) :
:


Then there exists a unique Lagrange multiplier  such that
such that 
The Lagrange multiplier theorem states that at any local maximum (or minimum) of the function evaluated under the equality constraints, if constraint qualification applies (explained below), then the gradient of the function (at that point) can be expressed as a linear combination of the gradients of the constraints (at that point), with the Lagrange multipliers acting as coefficients.[8] This is equivalent to saying that any direction perpendicular to all gradients of the constraints is also perpendicular to the gradient of the function. Or still, saying that the directional derivative of the function is 0 in every feasible direction.
Single constraint[edit]
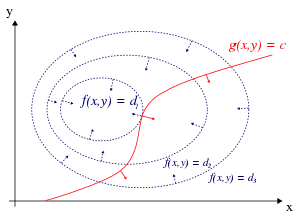
Figure 1: The red curve shows the constraint g(x, y) = c. The blue curves are contours of f(x, y). The point where the red constraint tangentially touches a blue contour is the maximum of f(x, y) along the constraint, since d1 > d2 .
For the case of only one constraint and only two choice variables (as exemplified in Figure 1), consider the optimization problem


(Sometimes an additive constant is shown separately rather than being included in  , in which case the constraint is written
, in which case the constraint is written  as in Figure 1.) We assume that both
as in Figure 1.) We assume that both  and
and  have continuous first partial derivatives. We introduce a new variable () called a Lagrange multiplier (or Lagrange undetermined multiplier) and study the Lagrange function (or Lagrangian or Lagrangian expression) defined by
have continuous first partial derivatives. We introduce a new variable () called a Lagrange multiplier (or Lagrange undetermined multiplier) and study the Lagrange function (or Lagrangian or Lagrangian expression) defined by

where the  term may be either added or subtracted. If
term may be either added or subtracted. If  is a maximum of
is a maximum of  for the original constrained problem and
for the original constrained problem and  then there exists
then there exists  such that (
such that ( ) is a stationary point for the Lagrange function (stationary points are those points where the first partial derivatives of are zero). The assumption
) is a stationary point for the Lagrange function (stationary points are those points where the first partial derivatives of are zero). The assumption  is called constraint qualification. However, not all stationary points yield a solution of the original problem, as the method of Lagrange multipliers yields only a necessary condition for optimality in constrained problems.[9][10][11][12][13] Sufficient conditions for a minimum or maximum also exist, but if a particular candidate solution satisfies the sufficient conditions, it is only guaranteed that that solution is the best one locally – that is, it is better than any permissible nearby points. The global optimum can be found by comparing the values of the original objective function at the points satisfying the necessary and locally sufficient conditions.
is called constraint qualification. However, not all stationary points yield a solution of the original problem, as the method of Lagrange multipliers yields only a necessary condition for optimality in constrained problems.[9][10][11][12][13] Sufficient conditions for a minimum or maximum also exist, but if a particular candidate solution satisfies the sufficient conditions, it is only guaranteed that that solution is the best one locally – that is, it is better than any permissible nearby points. The global optimum can be found by comparing the values of the original objective function at the points satisfying the necessary and locally sufficient conditions.
The method of Lagrange multipliers relies on the intuition that at a maximum, f(x, y) cannot be increasing in the direction of any such neighboring point that also has g = 0. If it were, we could walk along g = 0 to get higher, meaning that the starting point wasn’t actually the maximum. Viewed in this way, it is an exact analogue to testing if the derivative of an unconstrained function is 0, that is, we are verifying that the directional derivative is 0 in any relevant (viable) direction.
We can visualize contours of f given by f(x, y) = d for various values of d, and the contour of g given by g(x, y) = c.
Suppose we walk along the contour line with g = c . We are interested in finding points where f almost does not change as we walk, since these points might be maxima.
There are two ways this could happen:
- We could touch a contour line of f, since by definition f does not change as we walk along its contour lines. This would mean that the tangents to the contour lines of f and g are parallel here.
- We have reached a “level” part of f, meaning that f does not change in any direction.
To check the first possibility (we touch a contour line of f), notice that since the gradient of a function is perpendicular to the contour lines, the tangents to the contour lines of f and g are parallel if and only if the gradients of f and g are parallel. Thus we want points (x, y) where g(x, y) = c and

for some
where

are the respective gradients. The constant is required because although the two gradient vectors are parallel, the magnitudes of the gradient vectors are generally not equal. This constant is called the Lagrange multiplier. (In some conventions is preceded by a minus sign).
Notice that this method also solves the second possibility, that f is level: if f is level, then its gradient is zero, and setting  is a solution regardless of
is a solution regardless of  .
.
To incorporate these conditions into one equation, we introduce an auxiliary function

and solve

Note that this amounts to solving three equations in three unknowns. This is the method of Lagrange multipliers.
Note that  implies
implies  as the partial derivative of
as the partial derivative of  with respect to is
with respect to is  which clearly is zero if and only if
which clearly is zero if and only if 
To summarize

The method generalizes readily to functions on  variables
variables

which amounts to solving n + 1 equations in n + 1 unknowns.
The constrained extrema of f are critical points of the Lagrangian , but they are not necessarily local extrema of (see Example 2 below).
One may reformulate the Lagrangian as a Hamiltonian, in which case the solutions are local minima for the Hamiltonian. This is done in optimal control theory, in the form of Pontryagin’s minimum principle.
The fact that solutions of the Lagrangian are not necessarily extrema also poses difficulties for numerical optimization. This can be addressed by computing the magnitude of the gradient, as the zeros of the magnitude are necessarily local minima, as illustrated in the numerical optimization example.
Multiple constraints[edit]

Figure 2: A paraboloid constrained along two intersecting lines.

Figure 3: Contour map of Figure 2.
The method of Lagrange multipliers can be extended to solve problems with multiple constraints using a similar argument. Consider a paraboloid subject to two line constraints that intersect at a single point. As the only feasible solution, this point is obviously a constrained extremum. However, the level set of is clearly not parallel to either constraint at the intersection point (see Figure 3); instead, it is a linear combination of the two constraints’ gradients. In the case of multiple constraints, that will be what we seek in general: The method of Lagrange seeks points not at which the gradient of is multiple of any single constraint’s gradient necessarily, but in which it is a linear combination of all the constraints’ gradients.
Concretely, suppose we have  constraints and are walking along the set of points satisfying
constraints and are walking along the set of points satisfying  Every point
Every point  on the contour of a given constraint function
on the contour of a given constraint function  has a space of allowable directions: the space of vectors perpendicular to
has a space of allowable directions: the space of vectors perpendicular to  The set of directions that are allowed by all constraints is thus the space of directions perpendicular to all of the constraints’ gradients. Denote this space of allowable moves by
The set of directions that are allowed by all constraints is thus the space of directions perpendicular to all of the constraints’ gradients. Denote this space of allowable moves by  and denote the span of the constraints’ gradients by
and denote the span of the constraints’ gradients by  Then
Then  the space of vectors perpendicular to every element of
the space of vectors perpendicular to every element of
We are still interested in finding points where does not change as we walk, since these points might be (constrained) extrema. We therefore seek such that any allowable direction of movement away from  is perpendicular to
is perpendicular to  (otherwise we could increase by moving along that allowable direction). In other words,
(otherwise we could increase by moving along that allowable direction). In other words,  Thus there are scalars
Thus there are scalars  such that
such that

These scalars are the Lagrange multipliers. We now have of them, one for every constraint.
As before, we introduce an auxiliary function

and solve

which amounts to solving  equations in unknowns.
equations in unknowns.
The constraint qualification assumption when there are multiple constraints is that the constraint gradients at the relevant point are linearly independent.
Modern formulation via differentiable manifolds[edit]
The problem of finding the local maxima and minima subject to constraints can be generalized to finding local maxima and minima on a differentiable manifold  [14] In what follows, it is not necessary that
[14] In what follows, it is not necessary that  be a Euclidean space, or even a Riemannian manifold. All appearances of the gradient
be a Euclidean space, or even a Riemannian manifold. All appearances of the gradient  (which depends on a choice of Riemannian metric) can be replaced with the exterior derivative
(which depends on a choice of Riemannian metric) can be replaced with the exterior derivative 
Single constraint[edit]
Let be a smooth manifold of dimension  Suppose that we wish to find the stationary points of a smooth function
Suppose that we wish to find the stationary points of a smooth function  when restricted to the submanifold
when restricted to the submanifold  defined by where
defined by where  is a smooth function for which 0 is a regular value.
is a smooth function for which 0 is a regular value.
Let  and
and  be the exterior derivatives of and . Stationarity for the restriction
be the exterior derivatives of and . Stationarity for the restriction  at
at  means
means  Equivalently, the kernel
Equivalently, the kernel  contains
contains  In other words,
In other words,  and
and  are proportional 1-forms. For this it is necessary and sufficient that the following system of
are proportional 1-forms. For this it is necessary and sufficient that the following system of  equations holds:
equations holds:

where  denotes the exterior product. The stationary points are the solutions of the above system of equations plus the constraint
denotes the exterior product. The stationary points are the solutions of the above system of equations plus the constraint  Note that the equations are not independent, since the left-hand side of the equation belongs to the subvariety of
Note that the equations are not independent, since the left-hand side of the equation belongs to the subvariety of  consisting of decomposable elements.
consisting of decomposable elements.
In this formulation, it is not necessary to explicitly find the Lagrange multiplier, a number such that 
Multiple constraints[edit]
Let and be as in the above section regarding the case of a single constraint. Rather than the function described there, now consider a smooth function  with component functions
with component functions  for which
for which  is a regular value. Let
is a regular value. Let  be the submanifold of defined by
be the submanifold of defined by 
is a stationary point of  if and only if contains
if and only if contains  For convenience let
For convenience let  and
and  where
where  denotes the tangent map or Jacobian
denotes the tangent map or Jacobian  The subspace
The subspace  has dimension smaller than that of
has dimension smaller than that of  , namely
, namely  and
and  belongs to
belongs to  if and only if
if and only if  belongs to the image of
belongs to the image of  Computationally speaking, the condition is that
Computationally speaking, the condition is that  belongs to the row space of the matrix of
belongs to the row space of the matrix of  or equivalently the column space of the matrix of
or equivalently the column space of the matrix of  (the transpose). If
(the transpose). If  denotes the exterior product of the columns of the matrix of
denotes the exterior product of the columns of the matrix of  the stationary condition for at becomes
the stationary condition for at becomes

Once again, in this formulation it is not necessary to explicitly find the Lagrange multipliers, the numbers  such that
such that

Interpretation of the Lagrange multipliers[edit]
In this section, we modify the constraint equations from the form  to the form
to the form  where the
where the  are m real constants that are considered to be additional arguments of the Lagrangian expression .
are m real constants that are considered to be additional arguments of the Lagrangian expression .
Often the Lagrange multipliers have an interpretation as some quantity of interest. For example, by parametrising the constraint’s contour line, that is, if the Lagrangian expression is
![{displaystyle {begin{aligned}&{mathcal {L}}(x_{1},x_{2},ldots ;lambda _{1},lambda _{2},ldots ;c_{1},c_{2},ldots )\[4pt]={}&f(x_{1},x_{2},ldots )+lambda _{1}(c_{1}-g_{1}(x_{1},x_{2},ldots ))+lambda _{2}(c_{2}-g_{2}(x_{1},x_{2},dots ))+cdots end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1867ddf9118c757c322a3d5c0c94965c64a65d0a)
then

So, λk is the rate of change of the quantity being optimized as a function of the constraint parameter.
As examples, in Lagrangian mechanics the equations of motion are derived by finding stationary points of the action, the time integral of the difference between kinetic and potential energy. Thus, the force on a particle due to a scalar potential, F = −∇V, can be interpreted as a Lagrange multiplier determining the change in action (transfer of potential to kinetic energy) following a variation in the particle’s constrained trajectory.
In control theory this is formulated instead as costate equations.
Moreover, by the envelope theorem the optimal value of a Lagrange multiplier has an interpretation as the marginal effect of the corresponding constraint constant upon the optimal attainable value of the original objective function: If we denote values at the optimum with a star ( ), then it can be shown that
), then it can be shown that

For example, in economics the optimal profit to a player is calculated subject to a constrained space of actions, where a Lagrange multiplier is the change in the optimal value of the objective function (profit) due to the relaxation of a given constraint (e.g. through a change in income); in such a context  is the marginal cost of the constraint, and is referred to as the shadow price.[15]
is the marginal cost of the constraint, and is referred to as the shadow price.[15]
Sufficient conditions[edit]
Sufficient conditions for a constrained local maximum or minimum can be stated in terms of a sequence of principal minors (determinants of upper-left-justified sub-matrices) of the bordered Hessian matrix of second derivatives of the Lagrangian expression.[6][16]
Examples[edit]
Example 1[edit]

Illustration of the constrained optimization problem 1
Suppose we wish to maximize  subject to the constraint
subject to the constraint  The feasible set is the unit circle, and the level sets of f are diagonal lines (with slope −1), so we can see graphically that the maximum occurs at
The feasible set is the unit circle, and the level sets of f are diagonal lines (with slope −1), so we can see graphically that the maximum occurs at  and that the minimum occurs at
and that the minimum occurs at 
For the method of Lagrange multipliers, the constraint is

hence the Lagrangian function,
![{displaystyle {begin{aligned}{mathcal {L}}(x,y,lambda )&=f(x,y)+lambda cdot g(x,y)\[4pt]&=x+y+lambda (x^{2}+y^{2}-1) ,end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/69623e2b0ffebabe351b9e7ed58a76751601bf66)
is a function that is equivalent to when  is set to 0.
is set to 0.
Now we can calculate the gradient:
![{displaystyle {begin{aligned}nabla _{x,y,lambda }{mathcal {L}}(x,y,lambda )&=left({frac {partial {mathcal {L}}}{partial x}},{frac {partial {mathcal {L}}}{partial y}},{frac {partial {mathcal {L}}}{partial lambda }}right)\[4pt]&=left(1+2lambda x,1+2lambda y,x^{2}+y^{2}-1right) color {gray}{,}end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cdf9c05227cba7a2024d2ef806cf55712c1a3073)
and therefore:

Notice that the last equation is the original constraint.
The first two equations yield

By substituting into the last equation we have:

so

which implies that the stationary points of are

Evaluating the objective function f at these points yields

Thus the constrained maximum is  and the constrained minimum is
and the constrained minimum is  .
.
Example 2[edit]

Illustration of the constrained optimization problem 2
Now we modify the objective function of Example 1 so that we minimize  instead of
instead of  again along the circle
again along the circle  Now the level sets of are still lines of slope −1, and the points on the circle tangent to these level sets are again
Now the level sets of are still lines of slope −1, and the points on the circle tangent to these level sets are again  and
and  These tangency points are maxima of
These tangency points are maxima of 
On the other hand, the minima occur on the level set for  (since by its construction cannot take negative values), at
(since by its construction cannot take negative values), at  and
and  where the level curves of are not tangent to the constraint. The condition that
where the level curves of are not tangent to the constraint. The condition that  correctly identifies all four points as extrema; the minima are characterized in by
correctly identifies all four points as extrema; the minima are characterized in by  and the maxima by
and the maxima by 
Example 3[edit]

Illustration of constrained optimization problem 3.
This example deals with more strenuous calculations, but it is still a single constraint problem.
Suppose one wants to find the maximum values of

with the condition that the – and  -coordinates lie on the circle around the origin with radius
-coordinates lie on the circle around the origin with radius  That is, subject to the constraint
That is, subject to the constraint

As there is just a single constraint, there is a single multiplier, say
The constraint is identically zero on the circle of radius Any multiple of may be added to leaving unchanged in the region of interest (on the circle where our original constraint is satisfied).
Applying the ordinary Lagrange multiplier method yields

from which the gradient can be calculated:

And therefore:

(iii) is just the original constraint. (i) implies  or
or  If
If  then
then  by (iii) and consequently from (ii). If
by (iii) and consequently from (ii). If  substituting this into (ii) yields
substituting this into (ii) yields  Substituting this into (iii) and solving for gives
Substituting this into (iii) and solving for gives  Thus there are six critical points of
Thus there are six critical points of 

Evaluating the objective at these points, one finds that

Therefore, the objective function attains the global maximum (subject to the constraints) at  and the global minimum at
and the global minimum at  The point
The point  is a local minimum of and
is a local minimum of and  is a local maximum of
is a local maximum of  as may be determined by consideration of the Hessian matrix of
as may be determined by consideration of the Hessian matrix of 
Note that while  is a critical point of
is a critical point of  it is not a local extremum of
it is not a local extremum of  We have
We have

Given any neighbourhood of  one can choose a small positive
one can choose a small positive  and a small
and a small  of either sign to get
of either sign to get  values both greater and less than
values both greater and less than  This can also be seen from the Hessian matrix of evaluated at this point (or indeed at any of the critical points) which is an indefinite matrix. Each of the critical points of is a saddle point of [4]
This can also be seen from the Hessian matrix of evaluated at this point (or indeed at any of the critical points) which is an indefinite matrix. Each of the critical points of is a saddle point of [4]
Example 4[edit]
- Entropy
Suppose we wish to find the discrete probability distribution on the points  with maximal information entropy. This is the same as saying that we wish to find the least structured probability distribution on the points
with maximal information entropy. This is the same as saying that we wish to find the least structured probability distribution on the points  In other words, we wish to maximize the Shannon entropy equation:
In other words, we wish to maximize the Shannon entropy equation:

For this to be a probability distribution the sum of the probabilities  at each point
at each point  must equal 1, so our constraint is:
must equal 1, so our constraint is:

We use Lagrange multipliers to find the point of maximum entropy,  across all discrete probability distributions
across all discrete probability distributions  on
on  We require that:
We require that:

which gives a system of n equations,  such that:
such that:

Carrying out the differentiation of these n equations, we get

This shows that all  are equal (because they depend on λ only). By using the constraint
are equal (because they depend on λ only). By using the constraint

we find

Hence, the uniform distribution is the distribution with the greatest entropy, among distributions on n points.
Example 5[edit]
- Numerical optimization

Lagrange multipliers cause the critical points to occur at saddle points (Example 5).
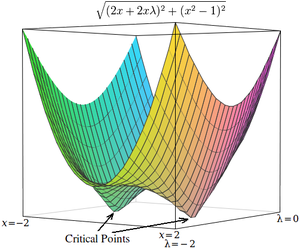
The magnitude of the gradient can be used to force the critical points to occur at local minima (Example 5).
The critical points of Lagrangians occur at saddle points, rather than at local maxima (or minima).[4][17] Unfortunately, many numerical optimization techniques, such as hill climbing, gradient descent, some of the quasi-Newton methods, among others, are designed to find local maxima (or minima) and not saddle points. For this reason, one must either modify the formulation to ensure that it’s a minimization problem (for example, by extremizing the square of the gradient of the Lagrangian as below), or else use an optimization technique that finds stationary points (such as Newton’s method without an extremum seeking line search) and not necessarily extrema.
As a simple example, consider the problem of finding the value of x that minimizes  constrained such that
constrained such that  (This problem is somewhat untypical because there are only two values that satisfy this constraint, but it is useful for illustration purposes because the corresponding unconstrained function can be visualized in three dimensions.)
(This problem is somewhat untypical because there are only two values that satisfy this constraint, but it is useful for illustration purposes because the corresponding unconstrained function can be visualized in three dimensions.)
Using Lagrange multipliers, this problem can be converted into an unconstrained optimization problem:

The two critical points occur at saddle points where x = 1 and x = −1.
In order to solve this problem with a numerical optimization technique, we must first transform this problem such that the critical points occur at local minima. This is done by computing the magnitude of the gradient of the unconstrained optimization problem.
First, we compute the partial derivative of the unconstrained problem with respect to each variable:
![{displaystyle {begin{aligned}&{frac {partial {mathcal {L}}}{partial x}}=2x+2xlambda \[5pt]&{frac {partial {mathcal {L}}}{partial lambda }}=x^{2}-1~.end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/498e5f0200a9e684456385a4d6b121c2274c2737)
If the target function is not easily differentiable, the differential with respect to each variable can be approximated as
![{displaystyle {begin{aligned}{frac { partial {mathcal {L}} }{partial x}}approx {frac {{mathcal {L}}(x+varepsilon ,lambda )-{mathcal {L}}(x,lambda )}{varepsilon }},\[5pt]{frac { partial {mathcal {L}} }{partial lambda }}approx {frac {{mathcal {L}}(x,lambda +varepsilon )-{mathcal {L}}(x,lambda )}{varepsilon }},end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0de4bda576fdb293b9e0b1f0ebe3f93d57c84f06)
where is a small value.
Next, we compute the magnitude of the gradient, which is the square root of the sum of the squares of the partial derivatives:
![{displaystyle {begin{aligned}h(x,lambda )&={sqrt {(2x+2xlambda )^{2}+(x^{2}-1)^{2} }}\[4pt]&approx {sqrt {left({frac { {mathcal {L}}(x+varepsilon ,lambda )-{mathcal {L}}(x,lambda ) }{varepsilon }}right)^{2}+left({frac { {mathcal {L}}(x,lambda +varepsilon )-{mathcal {L}}(x,lambda ) }{varepsilon }}right)^{2} }}~.end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a19179451d91b7f354ff6326de2c76749c3e9f0f)
(Since magnitude is always non-negative, optimizing over the squared-magnitude is equivalent to optimizing over the magnitude. Thus, the “square root” may be omitted from these equations with no expected difference in the results of optimization.)
The critical points of h occur at x = 1 and x = −1, just as in Unlike the critical points in however, the critical points in h occur at local minima, so numerical optimization techniques can be used to find them.
Applications[edit]
Control theory[edit]
In optimal control theory, the Lagrange multipliers are interpreted as costate variables, and Lagrange multipliers are reformulated as the minimization of the Hamiltonian, in Pontryagin’s minimum principle.
Nonlinear programming[edit]
The Lagrange multiplier method has several generalizations. In nonlinear programming there are several multiplier rules, e.g. the Carathéodory–John Multiplier Rule and the Convex Multiplier Rule, for inequality constraints.[18]
Power systems[edit]
Methods based on Lagrange multipliers have applications in power systems, e.g. in distributed-energy-resources (DER) placement and load shedding.[19]
See also[edit]
- Adjustment of observations
- Duality
- Gittins index
- Karush–Kuhn–Tucker conditions: generalization of the method of Lagrange multipliers
- Lagrange multipliers on Banach spaces: another generalization of the method of Lagrange multipliers
- Lagrange multiplier test in maximum likelihood estimation
- Lagrangian relaxation
References[edit]
- ^ Hoffmann, Laurence D.; Bradley, Gerald L. (2004). Calculus for Business, Economics, and the Social and Life Sciences (8th ed.). pp. 575–588. ISBN 0-07-242432-X.
- ^ Beavis, Brian; Dobbs, Ian M. (1990). “Static Optimization”. Optimization and Stability Theory for Economic Analysis. New York: Cambridge University Press. p. 40. ISBN 0-521-33605-8.
- ^ Protter, Murray H.; Morrey, Charles B., Jr. (1985). Intermediate Calculus (2nd ed.). New York, NY: Springer. p. 267. ISBN 0-387-96058-9.
- ^ a b c Walsh, G.R. (1975). “Saddle-point Property of Lagrangian Function”. Methods of Optimization. New York, NY: John Wiley & Sons. pp. 39–44. ISBN 0-471-91922-5.
- ^ Kalman, Dan (2009). “Leveling with Lagrange: An alternate view of constrained optimization”. Mathematics Magazine. 82 (3): 186–196. doi:10.1080/0025570X.2009.11953617. JSTOR 27765899. S2CID 121070192.
- ^ a b Silberberg, Eugene; Suen, Wing (2001). The Structure of Economics : A Mathematical Analysis (Third ed.). Boston: Irwin McGraw-Hill. pp. 134–141. ISBN 0-07-234352-4.
- ^ de la Fuente, Angel (2000). Mathematical Methods and Models for Economists. Cambridge: Cambridge University Press. p. 285. doi:10.1017/CBO9780511810756. ISBN 9780521585125.
- ^ Luenberger, David G. (1969). Optimization by Vector Space Methods. New York: John Wiley & Sons. pp. 188–189.
- ^ Bertsekas, Dimitri P. (1999). Nonlinear Programming (Second ed.). Cambridge, MA: Athena Scientific. ISBN 1-886529-00-0.
- ^ Vapnyarskii, I.B. (2001) [1994], “Lagrange multipliers”, Encyclopedia of Mathematics, EMS Press.
- ^ Lasdon, Leon S. (2002) [1970]. Optimization Theory for Large Systems (reprint ed.). Mineola, New York, NY: Dover. ISBN 0-486-41999-1. MR 1888251.
- ^ Hiriart-Urruty, Jean-Baptiste; Lemaréchal, Claude (1993). “Chapter XII: Abstract duality for practitioners”. Convex analysis and minimization algorithms. Grundlehren der Mathematischen Wissenschaften [Fundamental Principles of Mathematical Sciences]. Vol. 306. Berlin, DE: Springer-Verlag. pp. 136–193 (and Bibliographical comments pp. 334–335). ISBN 3-540-56852-2. MR 1295240. Volume II: Advanced theory and bundle methods.
- ^ Lemaréchal, Claude (15–19 May 2000). “Lagrangian relaxation”. In Jünger, Michael; Naddef, Denis (eds.). Computational combinatorial optimization: Papers from the Spring School held in Schloß Dagstuhl. Spring School held in Schloß Dagstuhl, May 15–19, 2000. Lecture Notes in Computer Science. Vol. 2241. Berlin, DE: Springer-Verlag (published 2001). pp. 112–156. doi:10.1007/3-540-45586-8_4. ISBN 3-540-42877-1. MR 1900016. S2CID 9048698.
- ^ Lafontaine, Jacques (2015). An Introduction to Differential Manifolds. Springer. p. 70. ISBN 9783319207353.
- ^ Dixit, Avinash K. (1990). “Shadow Prices”. Optimization in Economic Theory (2nd ed.). New York: Oxford University Press. pp. 40–54. ISBN 0-19-877210-6.
- ^ Chiang, Alpha C. (1984). Fundamental Methods of Mathematical Economics (Third ed.). McGraw-Hill. p. 386. ISBN 0-07-010813-7.
- ^ Heath, Michael T. (2005). Scientific Computing: An introductory survey. McGraw-Hill. p. 203. ISBN 978-0-07-124489-3.
- ^ Pourciau, Bruce H. (1980). “Modern multiplier rules”. American Mathematical Monthly. 87 (6): 433–452. doi:10.2307/2320250. JSTOR 2320250.
- ^
Gautam, Mukesh; Bhusal, Narayan; Benidris, Mohammed (2020). A sensitivity-based approach to adaptive under-frequency load shedding. 2020 IEEE Texas Power and Energy Conference (TPEC). Institute of Electronic and Electrical Engineers. pp. 1–5. doi:10.1109/TPEC48276.2020.9042569.
Further reading[edit]
- Beavis, Brian; Dobbs, Ian M. (1990). “Static Optimization”. Optimization and Stability Theory for Economic Analysis. New York, NY: Cambridge University Press. pp. 32–72. ISBN 0-521-33605-8.
- Bertsekas, Dimitri P. (1982). Constrained optimization and Lagrange multiplier methods. New York, NY: Academic Press. ISBN 0-12-093480-9.
- Beveridge, Gordon S.G.; Schechter, Robert S. (1970). “Lagrangian multipliers”. Optimization: Theory and Practice. New York, NY: McGraw-Hill. pp. 244–259. ISBN 0-07-005128-3.
- Binger, Brian R.; Hoffman, Elizabeth (1998). “Constrained optimization”. Microeconomics with Calculus (2nd ed.). Reading: Addison-Wesley. pp. 56–91. ISBN 0-321-01225-9.
- Carter, Michael (2001). “Equality constraints”. Foundations of Mathematical Economics. Cambridge, MA: MIT Press. pp. 516–549. ISBN 0-262-53192-5.
- Hestenes, Magnus R. (1966). “Minima of functions subject to equality constraints”. Calculus of Variations and Optimal Control Theory. New York, NY: Wiley. pp. 29–34.
- Wylie, C. Ray; Barrett, Louis C. (1995). “The extrema of integrals under constraint”. Advanced Engineering Mathematics (Sixth ed.). New York, NY: McGraw-Hill. pp. 1096–1103. ISBN 0-07-072206-4.
External links[edit]
![]()
- Exposition
- Kipid. “Method of Lagrange multipliers” (blog).
- Steuard. “Conceptual introduction”. slimy.com. — plus a brief discussion of Lagrange multipliers in the calculus of variations as used in physics.
- Carpenter, Kenneth H. “Lagrange multipliers for quadratic forms with linear constraints” (PDF). Kansas State University.
- Additional text and interactive applets
- Resnik. “Simple explanation with an example of governments using taxes as Lagrange multipliers”. umiacs.umd.edu. University of Maryland.
- Klein, Dan. “Lagrange multipliers without permanent scarring] Explanation with focus on the intuition” (PDF). nlp.cs.berkeley.edu. University of California, Berkeley.
- Sathyanarayana, Shashi. “Geometric representation of method of Lagrange multipliers”. wolfram.com (Mathematica demonstration). Wolfram Research.
Needs Internet Explorer / Firefox / Safari.
— Provides compelling insight in 2 dimensions that at a minimizing point, the direction of steepest descent must be perpendicular to the tangent of the constraint curve at that point. - “Lagrange multipliers – two variables”. MIT Open Courseware (ocw.mit.edu) (Applet). Massachusetts Institute of Technology.
- “Lagrange multipliers”. MIT Open Courseware (ocw.mit.edu) (video lecture). Mathematics 18-02: Multivariable calculus. Massachusetts Institute of Technology. Fall 2007.
- Bertsekas. “Details on Lagrange multipliers” (PDF). athenasc.com (slides / course lecture). Non-Linear Programming. — Course slides accompanying text on nonlinear optimization
- Wyatt, John (7 April 2004) [19 November 2002]. “Legrange multipliers, constrained optimization, and the maximum entropy principle” (PDF). www-mtl.mit.edu. Elec E & C S / Mech E 6.050 – Information, entropy, and computation. — Geometric idea behind Lagrange multipliers
- “Using Lagrange multipliers in optimization”. matlab.cheme.cmu.edu (MATLAB example). Pittsburgh, PA: Carnegie Mellon University. 24 December 2011.
