ИСТИННЫЙ КУРС, ИСТИННЫЙ ПЕЛЕНГ И КУРСОВОЙ УГОЛ
Основные задачи навигации: определение направления движения судна и определение направлений на ориентиры, наблюдаемые с судна. Обычно направление движения судна определяется положением его диаметральной плоскости (ДП) относительно истинного меридиана.
Истинный курс (ИК) — угол в плоскости истинного горизонта, заключенный между нордовой (Nи) частью истинного меридиана и линией курса (рис. 9). Линия курса — линия пересечения диаметральной плоскости судна с плоскостью истинного горизонта.
Истинный курс судна измеряется углом в горизонтальной плоскости, отсчитываемым от линии истинного меридиана по часовой стрелке от 0° до 360°.
Истинный пеленг (ИП) —угол между плоскостью истинного меридиана и вертикальной плоскостью, проходящий через наблюдателя и ориентир. Линия пересечения вертикальной плоскости, проходящей через ориентир, с плоскостью истинного горизонта называется линией пеленга.
Истинный пеленг измеряется в горизонтальной плоскости от линии истинного меридиана до линии пеленга по часовой стрелке от 0° до 360°.
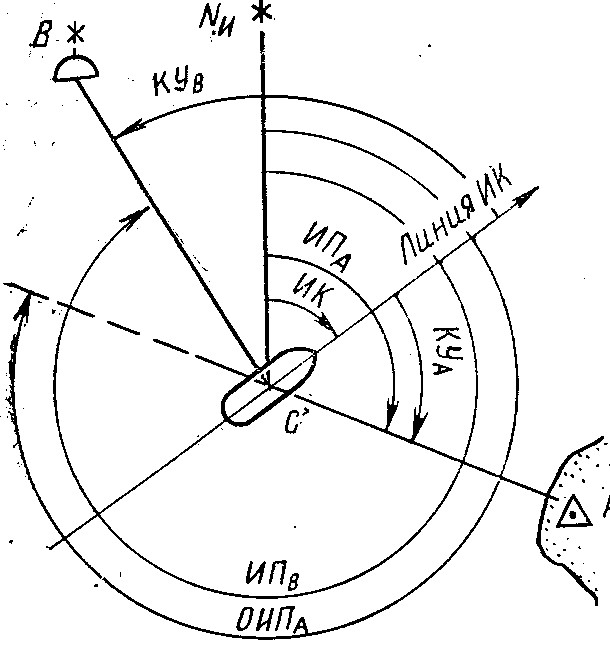
Рис. 9. Истинные направления:
С — судно; А в В — ориентиры; КУА и КУВ — соответственно курсовые углы на ориентиры А и В; ИПА и ИПВ — истинные пеленги соответственно на ориентиры А и В; ОИП — обратный истинный пеленг на ориентир А
____________________________
Угол, отличающийся от истинного пеленга на 180°, называется обратным истинным пеленгом (ОИП), т. е. ОИП=ИП±180°.
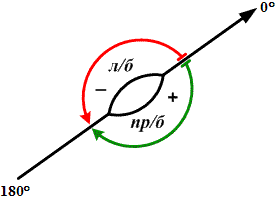
Курсовой угол (КУ) — угол, заключенный между диаметральной плоскостью судна и вертикальной плоскостью, проходящей через наблюдателя и ориентир. Курсовые углы отсчитываются от носовой части диаметральной плоскости (ДП) вправо и влево от 0° до 180°, и в зависимости от этого называются курсовыми углами правого (п/б) и левого (л/б) борта.
Если курсовой угол на ориентир составляет 90° правого или левого борта, то говорят, что ориентир находится на траверзе судна.
Условно курсовым углам правого борта приписывается знак плюс (+), а левого борта – знак минус (—).
В судовождении применяется также счет курсовых углов от носовой части диаметральной плоскости по часовой стрелке от 0° до 360°, в этом случае борт судна не указывают.
Зависимость между ИК, ИП и КУ выражается формулами:
ИП=ИК+КУ; КУ=ИП-ИК; ИК=ИП-КУ.
Указанные формулы алгебраические, и курсовой угол входит в них со своим знаком.
Истинный курс, истинный пеленг, курсовой угол

Рис. 3.6.
Истинный курс судна
Направление
движения судна характеризуется его
истинным курсом.
Покажем
это на рис. 3.6. для чего:
-
проведем
северную часть истинного меридиана
наблюдателя, находящегося на судне С
→ С-NИ; -
продолжим носовую
часть продольной оси симметрии судна
→ С-К, тогда:
–
истинный курс
судна естьничто иное, какнаправление продольной оси судна,
измеряемое горизонтальным углом между
северной частью истинного меридиана и
носовой частью продольной оси судна.
Истинный
курс судна измеряется в круговой системе
счета направлений от 0° до 360°(по
часовой стрелке) и обозначается – какИК.
Направление
на объект наблюдения определяется или
относительно носовой части продольной
оси судна (курсовой угол), или
относительно северной части истинного
меридиана наблюдателя (истинный
пеленг).
Истинным
пеленгом называется горизонтальный
угол в плоскости истинного горизонта
наблюдателя между северной частью
истинного меридиана наблюдателя и
направлением из точки наблюдения на
объект(рис. 3.7.).

Рис.
3.7. Истинный пеленг на ориентир
Истинный
пеленг, также как и истинный курс,
измеряется в круговой системе счета
направлений от 0° до 360°по часовой
стрелке и обозначается какИП.
Обратный
истинный пеленг(ОИП) – это
направление, отличающееся от истинного
пеленга на 180°.
Если
ИП на маяк95°, то ОИП (с маяка на судно) 275° (рис.
3.7.).
|
ОИП |
Курсовым
углом называется горизонтальный
угол в плоскости истинного горизонта
наблюдателя между носовой частью
продольной оси судна (ДП судна) и
направлением из точки наблюдения на
объект (ориентир).
Курсовой
угол измеряется в полукруговой системе
счета направлений от 0° до 180° левого
(л/б) и правого (пр/б) бортов (рис.
3.8).
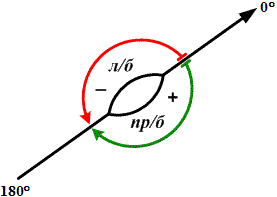
Рис.
3.8. Курсовой угол
Курсовой
угол обозначается – как КУилиq.
При
вычислениях курсовому углу правого
борта (КУ пр/б) придается знак «+», а
курсовому углу левого борта (КУ л/б) –
знак «–».
Курсовые
углы, равные 90° (90° пр/б, 90° л/б) получили
название «траверзных»
курсовых углов.
Курсовые
углы, равные 45° (45° пр/б, 45° л/б) –
«крамбола».
Курсовые
углы, равные 135° (135° пр/б, 135° л/б) –
«раковина»
или «подзор».
Все
истинные направления (ИК, ИП, КУ) связаны
между собой соотношениями, которые
легко установить из рис. 3.9.

Рис.
3.9. Истинные направления
|
ИП |
|
ИК |
|
КУ |
Формулы
алгебраические.
При
решении задач по данным формулам
необходимо знать, что:
-
Еслипри вычислениях ИК или ИП получаетсярезультат более 360°, то из полученного
результата необходимо вычесть 360°.Например:
ИК
= 270°, КУ = 130° пр/б, ИП = ?
ИП = ИК + КУ =
270° + 130° = 400° – 360° = 40°Ответ:
ИП
= 40°. -
Еслипри вычислениях ИК или ИП получитсяотрицательный результат, необходимок полученному результату прибавить
360°.Например:
ИК
= 40°, КУ = 70° л/б, ИП = ?
ИП = ИК + КУ = 40°
+ (–70°) = 40° – 70° = –30° + 360° = 330°Ответ:
ИП
= 330°. -
Если при вычислениях
значение курсового угла (КУ) получается
более 180°, то необходимо полученный
результат отнять от 360°, а наименование
КУ изменить на противоположное.
-
Например:
ИП
= 340°, ИК = 40°, КУ = ?
КУ = ИП – ИК = 340° –
40° = 300° пр/б, 360° – 300° = 60° л/бОтвет:
КУ
= 60° л/б.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Для обеспечения безопасности плавания корабля и определения его места в море необходимо уметь определять направление движения корабля и направления на видимые с корабля ориентиры.
Направления в море определяется относительно истинного меридиана и называется истинными направлениями
.
Направления движения корабля определяется истинным курсом (ИК). Истинным курсом
называются горизонтальный угол между северной (нордовой) частью истинного меридиана и диаметральной плоскостью корабля по направлению его движения, измеренный по ходу часовой стрелки (Рис. 11).
(Рис. 11)
Диаметральной плоскостью
корабля называются вертикальная плоскость проходящая через продольную ось симметрии корабля. Диаметральная плоскость, пересекаясь с плоскостью истинного горизонта, образует линию курса корабля. Таким образом, истинным курсом (ИК) является угол между северной часть истинного меридиана и линией курса.
Истинный курс измеряется от северной (нордовой) части истинного меридиана вправо от 0º до 360º, истинный курс отрицательного курса не имеет.
Направления на видимый с корабля ориентир определяется истинным пеленгом (ИП).
Истинным пеленгом
называются горизонтальный угол между северной часть истинного меридиана и направлением из точки наблюдения на объект. Истинный пеленг измеряется от северной части истинного меридиана вправо от 0º до 360º. Истинный пеленг всегда имеет положительное значение.
При решении отдельных задач используется направление, противоположное истинному пеленгу. Это направление называется обратным истинным пеленгом
(ОИП):
ОИП = ИП ±180º
(6)
(+180º, если ИП <180º; -180º, если ИП >180º)
При решении определенных задач, для которых важное, значение имеет взаимное расположение корабля и видимого с него ориентира, направление определяется относительно диаметральной плоскости корабля, т.е. определяется курсовой угол (КУ).
Курсовым углом
называется угол между диаметральной плоскостью корабля и направлением на предмет. Курсовой угол измеряется от носовой части диаметральной плоскости корабля вправо или влево от 0º до 180º.
Курсовым углом придается наименование правого борта (КУ п.б.) или (КУ л.б.)
При решении задач курсовые углы правого борта считаются положительными и имеют знак «плюс» (+), а курсовые углы левого борта считаются отрицательными и имеют знак «минус» (−).
При решении ряда задач, особенно с применением счетно-решающих к приборов, курсовой угол измеряется в круговом счете. Счет ведется от носовой части диаметральной плоскости корабля вправо от 0º до 360º (Рис. 12)
.
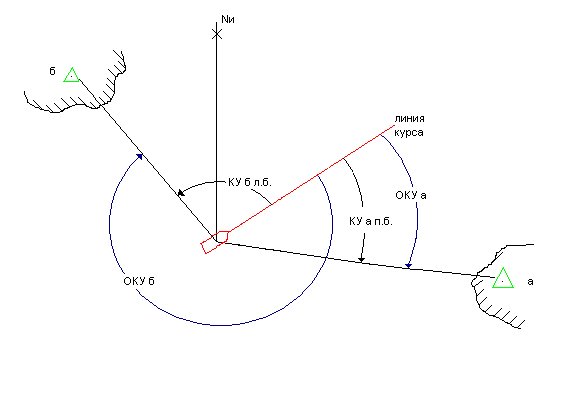 (Рис. 12)
(Рис. 12)
Курсовой угол в круговом счете получил название отсчета курсового угла (ОКУ). Связь между отсчетом курсового угла и курсовыми углами определяется выражениями:
ОКУ = КУ п.б.
(7)
ОКУ = 360º – КУ л.б.
Направление, перпендикулярное диаметральной плоскости корабля, называются траверзом
. Предметы, находящиеся на КУ = 90º правого или левого борта, находятся на траверзе корабля.
Можно вывести зависимость между ИП, ИК и КУ:
ИП = ИК + КУ
; (8)
ИК = ИП – КУ
;
КУ = ИП – ИК
;
При решении задач по формулам (1) следует понимать, что эти формулы алгебраические. В них курсовой угол КУ берется со своим знаком. При этом необходимо учитывать, что ИК и ИП не имеют отрицательное значение ИК и ИП, то его нужно вычесть из 360º, полученный результат считать положительным.
При решении практических задач кораблевождение нередко используется положение траверза предмета как правило, момент траверза фиксируется истинным пеленгом на этот предмет, который рассчитывается по формуле:
ИП 1 = ИК ± 90º п.б./л.б.
(9)
1. Пример
ИК = 240,0º, КУ = 60º п.б. Определить ИП и ОИП.
Решение:
ИП = ИК + КУ: ИП = 240,0º + 60º = 300,0º
ОИП = ИП ± 180º, ОИП = 300,0º – 180,0º = 120,0º
2. Пример
ИК 50,0º, ИП = 150,0º. Определить КУ и ОКУ
Решение:
КУ = ИП – ИК; КУ = 150,0º – 50,0º = 100º п.б.
ОКУ = КУ п.б.; ОКУ = 100º
3. Пример
ИП = 240,0º, КУ = 30º п.б. Определить ИК.
Решение:
ИК = 240,0я – 30,0º = 210,0º
PAGE_BREAK–Истинный курс (ИК)
– угол между северной частью истинного меридиана и диаметральной плоскостью судна.
Истинный пеленг (ИП)
– угол между северной частью истинного меридиана и направлением на объект.
Обратный истинный пеленг (ОИП)
– отличается от ИП на 180°.
Курсовой угол (КУ)
– угол между носовой частью диаметральной плоскости судна и направлением на объект; измеряется от 0 до 180° в сторону правого и левого борта или по часовой стрелке от 0 до 360°. КУ правого борта имеет знак «плюс», КУ левого борта – знак «минус».
Зависимости между ИК, ИП и КУ:
ИК= ИП – КУ; ИП = ИК+КУ; КУ = ИП – ИК.
Компасный, гирокомпасный курс (КК, ГКК)
– угол между северной частью компасного (гироскопического) меридиана и носовой частью диаметральной плоскости судна.
Компасный, гирокомпасный пеленг (КП, ГКП)
– угол между северной частью компасного (гироскопического) меридиана и направлением на объект.
Поправка компаса (гирокомпаса)
D
К (
D
ГК)
– угол между истинным и компасным (гироскопическим) меридианами.
Восточная (остовая) D
К (D
ГК) имеет знак «плюс», западная (вестовая) – «минус».
Магнитное склонение
(d) – угол между истинным и магнитным меридианами и (меняется от 0 до 180°). Восточное имеет знак «плюс», западное – «минус»; снимается с карты в районе плавания и приводится к году плавания. Годовое увеличение (уменьшение) а относится к абсолютной величине склонения, т. е. к углу, а не к его знаку.
При уменьшении склонения, если значение его небольшое, а изменение за несколько лет превосходит уникальное на карте, при переходе через ноль склонение начинает возрастать с противоположным знаком.
Магнитный курс (МК)
– угол между северной частью магнитного меридиана и носовой частью диаметральной плоскости судна.
Магнитный пеленг (МП)
– угол между северной частью магнитного меридиана и направлением на объект.
Обратный магнитный пеленг (ОМП)
– отличается от МП на 180°.
Девиация магнитного компаса (d) – угол между магнитным и компасным меридианами, изменяется от 0 до 180°. Восточной (остовой) – приписывается знак «плюс», западной (вестовой) – «минус».
ИК = КК + DМК = МК + d
D=11оW; КК=34°; ИП=351°; ОКП=176°
Определить:
D; DМК; ОМП; КУ; ИК
Решение:
ИП = КП+DМК = ОИП +/- 1800= МП + d= ИК + КУ
ИК = КК + DМК = МК + d
КУ = 3220п/б
КУ = 380л/б
КК= 1З0°; ОИП=335°; ОМП=355°; КУ=50°;ветер NE; a= 8°
Определить:
D; d; DМК; КП; ПУa
Решение:
ОИП = 3350
ОМП = 355°
ОИП = 3350
ПУa=181°; ветер ESE; a= 9°; КУ= 101о; ОМП = 89°; КП = 276°; DГК=+3°.
Определить:
D; d; КК; ОИП; ГКК; DМК
Решение:
Определение девиации и поправки главного компаса по створу, девиации и поправки путевого компаса по сличению курсов
Определить:
Продолжение
–PAGE_BREAK–Определение поправки по пеленгу створа.
1. Снимаем с карты истинный пеленг створа ИП, получаем ОИП.
2. На ходу в момент пересечения створа берем ОКПмк по магнитному компасу.
3. Взятый ОКПк сопоставляем с ОИП:
DМКгл = ОИП – ОКПмггл
DМКгл = d+ dгл
По данным задания имеем, ОИП, ОКПмггл, d, тогда расчитаем:
Перед выходом на линию створа судно удерживают на данном курсе не менее 3 мин. Точность пеленгования повышается при КУ
створа, близких к траверзным, при меньших расстояниях до переднего створного знака, при большем разносе створных знаков.
Определение по сличению с другим компасом, поправка которого известна:
1. Одновременно по команде замечают показания курсов по компасу, поправка которого известна ККглмк (главный магнитный компас),
и по компасу, поправка которого определяется ККмкп (путевой компас).
2.
По формулам рассчитывают ИК
по показаниям компаса, поправка которого известна
ИК= ККмкгл+ DМКгл
(DМКгл для данного задания рассчитана, методом пеленгования створа)
3. Рассчитываем искомую поправку другого компаса:
DМКмкп = ИК – ККмгп
DМКп = d+ dп
По данным задания имеем, ККмкгл, DМКгл, ККмгп, тогда расчитаем:
Результаты сводим в таблицу:
Масштаб карты 1:1000000. Определить предельную точность масштаба.
Точность масштаба (карты)
(scale accuracy) – расстояние на местности, соответствующее наименьшему делению линейногомасштаба
карты. Расстояние на местности, соответствующее 0,1 мм в масштабе карты, называется предельной точностью масштаба
(scale accuracy limit) карты.
Масштаб карты – одна из важнейших её характеристик. Он определяет степень уменьшения линий на карте относительно горизонтальных положений соответствующих им линий на местности. Масштаб указан на каждом листе карты.
Численный масштаб в общем виде, т.е. безотносительно к какой-либо определённой системе линейных мер, обозначается на картах в виде отношения 1: М, где М – число, указывающее, во сколько раз уменьшены длины линий на местности при изображении их на карте. Так, масштаб 1:1000000 означает, что любой единице длины на карте соответствует 1000000 таких же единиц на местности.
Для практического использования при измерениях по карте численный масштаб, кроме того, представляют именованным числом, указывая непосредственно величину масштаба, т.е. расстояние на местности, соответствующее 1 см карты. Так, для 1:1000000 карты величина масштаба равна 10000 м.
В зависимости от масштаба карты в конечный результат определения места вносятся ошибки графических построений, точность которых характеризуется следующими экспериментальными данными (для советских морских карт):
Предельной точностью масштаба оригиналов морских карт называется линейное расстояние на местности, соответствующее 0,2 мм на карте данного масштаба,
следовательно имея расстояние на местности, соответствующее 1 см карты масштабом 1:1000000 равное 10000 м, тогда расстояние в 1 мм карты масштабом 1:1000000 равно 1000 м, а 0,1 мм равно 100 м, т.е. п
редельная точность масштаба для карты масштаба 1: 1000000 будет 200 метров.
По каким предметам и как корректируются карты. Виды корректур.
Судовая коллекция карт и руководств для плавания делится на три группы:
Первая группа
включает комплекты карт и руководств для плавания, предназначенные для обеспечения плавания:
По судоходной линии, на которой закреплено судно, традиционные районы промысла;
Между определёнными портами, а для нелинейных судов в соответствии с очередным рейсовым заданием.
К первой группе относятся также каталоги карт и книги.
Вторая группа
включает карты, и руководства для плавания, которые могут быть использованы в предстоящем плавании в случаях отклонения судна от намеченного пути, непредвиденного захода в порт-убежище и т.д.
Третья группа
включает все остальные карты и руководства для плавания, входящие в судовую коллекцию.
Комплекты первой группы корректируются с получением ИМ и других корректурных документов. Корректура их должна быть закончена до выхода в рейс.
Если стоянка в порту кратковременная и корректуру невозможно выполнить до выхода судна в рейс, разрешается, по усмотрению капитана, производить корректуру раздельно, по этапам перехода. До выхода из порта необходимо закончить корректуру в таком объёме, чтобы обеспечить плавание судна не менее чем на первые трое суток. Корректура остальных карт первой группы выполняется на переходе и во время стоянки в промежуточных портах.
Комплекты второй группы корректируется после завершения корректуры первой группы. Комплекты третьей группы на судне в рейсе, как правило, не корректируются, однако корректурный материал для них систематизируется в последовательности его поступления, хранится на и используется по необходимости при изменении рейсового задания.
На судах рыбной промышленности в период меж рейсовых стоянок корректуру карт и руководств для плавания производят, как правило, ЭРНК по заявке, подаваемой капитаном судна.
По своему характеру ИМ подразделяются на постоянные, временные
и предварительные
.
Постоянные ИМ
содержат сведения о навигационной обстановке, не подвергающейся частым изменениям.
Временные ИМ
содержат сведения о непродолжительных изменениях в навигационной обстановке. В тексте, которых указан срок их действия, автоматически утрачивают своё значение по истечении указанного срока.
Предварительные ИМ
содержат сведения о наиболее важных предполагаемых или планируемых в ближайшее время изменений в навигационной обстановке.
Корректуру карт следует начинать с последнего номера ИМ и выполнять её в последовательности убывания номеров.
Из карт, подобранных на предстоящий рейс, в первую очередь корректируются наиболее крупного масштаба.
Корректура на картах выполняется следующим образом:
По постоянным ИМ новые данные наносятся красной тушью (чернилами) чертёжным пером; прежние перечёркиваются крестиком, а текстовая часть зачёркивается тонкой линией.
По временным и предварительным ИМ, а также по НАВИП корректура карт выполняется аналогично, но простым карандашом.
Корректура карт первой группы по радионавигационным сообщениям выполняется немедленно
.
Определить поправку и коэффициент лага, если S= 40,3 м.миль, РОЛ=37,3.
Имеем:
Лаговое расстояние:
Поправка лага:
, где РОЛ = (ОЛ2 – ОЛ1)
Коэффициент лага:
Тогда:
D
Л = 8,04%
Кл = 1,08
Решить графически, если дано:
ПУc=305,0°, Vл;=18 узлов; течение 100 – 3,0 узла, a=13° пр/б; d= +6,0о; d= +2,0°.
Определить:
B; ПУa; ИК; DМК; МК; V.
Имеем обратную задачу. Порядок решения.
Из начальной точки проложим линию заданного ПУС
;
От начальной точки отложить вектор течения v
т
;
Из конца вектора v
т
раствором измерителя, равным v
л
,
сделаем засечку на линии ПУС
, полученная точка является концом векторов v
л
, последний указывает направление ПУ
a
;
Параллельной линейкой перенесем вектор v
л
в начальную точку и проложим найденный ПУа
;
Рассчитаем ИК = ПУ
a
–
a
, т.к. по условию задачи
a
=13° пр/б
Рассчитаем S
Л
и отложим по линии ПУа
;
Из полученной точки проведем линию до пересечения с линией ПУс
длина вектора S
т
показывает, на какое расстояние судно снесено течением.
Далее рассчитываем:
Определить радиус круга Мс, внутри которого находится вероятное место судна, если возможная ошибка в поправке компаса mк=2,5° и в поправке лага mл=± 0,5%. Судно прошло расстояние S=190 м.миль.
Международная морская организация ИМО разработала для цели предупреждения посадок на мели стандарт точности судовождения “Accuracy Standard for Navigation
” и приняла его резолюцией А.529(13) от 17.11.1983 г.
Названный стандарт ИМО содержит требования к точности текущего места судна в зависимости от его скорости и расстояния до ближайшей опасности независимо от средств и способов, обеспечивающих эту требуемую точность. Под навигационной опасностью подразумеваются нанесенные на карту или обнаруженные препятствия и несудоходные глубины, а также границы опасных и запретных районов. Для радиальной погрешности места судна с вероятностью Р = 0,95 введено обозначение “R”, и дается «Критерий для оценки точности места судна (ИМО)» R = 2Мс, где
Mk= среднеквадратичная погрешность компаса
Mл= среднеквадратичная погрешность лага
Следует иметь в виду при навигационных расчетах точности счисления, обсерваций, что все методики в навигации, астронавигации даны для расчета радиальной средней квадратической погрешности (РСКП) счисления, обсервации (Мс, Мо). РСКП накрывает истинное место судна с вероятностью Р = 0,63 – 0,68.
,
Т.е. судно находится внутри окружности данным радиусом, с вероятностью Р = 0,63 – 0,68, согласно требованиям ИМО необходимо увеличить этот радиус в два раза.
Из точки с координатами
J1 = 690 16,5¢N
Судно следовало переменными курсами и было подвержено дрейфу от ветра N – 6 баллов и течению Кт=100°, Vt= 1 узел в течение 64 часов, причем плавание совершалось так:
Угол дрейфа, a
Плавание, S(м.мили)
Определить:
J2; l2; Ген К; Ген S
Составим таблицу расчета. При расчете используем таблицы МТ-75 (Таблицы 24, 25), причем течение будем учитывать как отдельный путь. Данный вид задачи относится к виду аналитического счисления.
Так как плавание в высоких широтах, то поэтому РД будем считать по средним широтам для каждого курса и отшествию используя таблицу 25 МТ-75, затем найдем Ген К и Ген S, используя формулы:
Продолжение
–PAGE_BREAK–
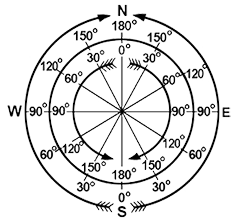
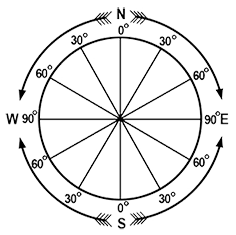
Рис. 3.4. Четвертая
система счета направлений
В
четвертной системе счета
направлений
(рис. 3.4) счет направлений ведется от
северной (N
) и южной (S
) части ИМН
в сторону востока (Е
) и в сторону
запада (W
) в пределах от 0° до 90°.
В
данной системе счета числовому значению
направления дается наименование,
соответствующее наименованию четверти.
Например
:
т.1
10°NE
;т.2
10°SE
;
т.3
30°SW
;т.4
70°NW
.
Четвертная
система счета направлений также будет
нам встречаться при решении задач
мореходной астрономии.
Переход
от четвертной системы счета к круговой
аналогичен изложенному в п. Б
, т.е.:
Если
наименование NE
→ оставь величину
угла без изменений (10°) → т. 1;
Если
наименование SЕ
→ взять дополнение
величины угла до 180° (170°) → т. 2;
Если
наименование SW
→ к величине угла
прибавь 180°(210°) → т. 3;
Если наименование
NW
→ взять дополнение величины угла
до 360° (290°) → т. 4.
Румбовая система счета
Была
основной системой счета направлений
во времена парусного флота.
Всего
32 румба
-направления.1 румб = 11
1/4
°
(111/4° · 32 = 360°).
![]()
Рис.
3.5. Румбовая система счета направлений
Румбы в градусной мере (т. 41 «мт-75», т. 5.13 «мт-2000»)
|
NE |
SE |
||||
|
Обозначение |
Число |
Обозначение |
Число |
||
|
SW |
NW |
||||
Главные
румбы:
N
(0°),E
(90°),S
(180°),W
(270°).
Четвертные
румбы:
NЕ
(45°),SE
(135°),SW
(225°),NW
(315°).
Вторые
румбы
:
N
N
Е
(22,5°), S
SE
(157,5°), S
SW
(202,5°), N
NW
(337,5°).
Шестые
румбы
:
E
N
Е
(67,5°), E
SE
(112,5°), W
SW
(247,5°), W
NW
(292,5°).
-
Истинные направления
Для обеспечения
навигационной безопасности плавания
судна в море необходимо уметь определять
направление его движения относительно
заданного пути, а также направления на
навигационные опасности и видимые с
судна ориентиры.
Если учитывать
движение судна только под действием
движителей, то направление его перемещения
по водной поверхности совпадает с
направлением его диаметральной плоскости,
поэтому положения судна принято
фиксировать углом, который составляет
его диаметральная плоскость с плоскостью
истинного меридиана.
Направления,
определяемые относительно истинного
меридиана и называются истинными
направлениями
.
Диаметральная
плоскость судна
(ДП
) – условная
вертикальная плоскость, делящая судно
в продольном направлении на две равные
части.
Диаметральная
плоскость судна, плоскости меридианов
и вертикалов, пересекаясь с плоскостью
истинного горизонта, образуют прямые
линии. Поэтому истинный курс, истинный
пеленг, курсовой угол в плоскости
истинного горизонта представляются
плоскими углами.
Прямая линия,
совпадающая с направлением диаметральной
плоскости судна, называется линией
курса
, а совпадающая с направлением
на ориентир –линией пеленга
.
Основным условием безопасности плавания корабля является безошибочное определение направления движения судна относительно заданной линии пути и направлений на навигационные опасности.
Основой для определения направлений движения судна и на окружающие судно объекты являются главные направления: N, S, Е,W. Любое из этих главных направлений может быть принято за начало счета направлений. В судовождении традиционно за начало счета направлений принимают или северную или южную часть линии истинного меридиана (полуденной линии). Определение направлений относительно полуденной линии производится по различным системам счета в зависимости от характера решаемых навигационных задач с точностью до 0,1′
.
Для определения направления в плоскости истинного горизонта используются три системы деления горизонта: круговая, полукруговая и четвертная.
Круговая система счета направлений
В круговой системе за начало счета направлений принята северная (нордовая) часть линии истинного меридиана. В этой системе вся плоскость истинного горизонта разделена на 360°. Счет направлений ведется от северной части истинного меридиана по часовой стрелке от 0° до 360°. Отрицательных значений система не предусматривает.
Форма записи: 37,4°.
В навигации круговая система счета направлений является основной и применяется для определения направления движения судна, а также направлений на видимые с судна предметы.
В соответствии с этой системой на суднах разбиты шкалы всех курсоуказателей и приборов, служащих для определения направлений в море.
Круговая система счета направлений проще и нагляднее других, но судоводитель должен уметь переводить направления, данные по одной системе, в направления по другой системе, так как при решении многих навигационных и астрономических задач получаются результаты с указанием наименования четверти.
Полукруговая система счета направлений
 В полукруговой системе плоскость истинного горизонта линией NS разделена на две части по 180° каждая. За начало счета направлений (0°) принимают как северную (N) часть, так и южную (S) часть линии истинного меридиана. Во всех случаях счет ведут к осту (Е) или весту (W) от 0° до 180°.
В полукруговой системе плоскость истинного горизонта линией NS разделена на две части по 180° каждая. За начало счета направлений (0°) принимают как северную (N) часть, так и южную (S) часть линии истинного меридиана. Во всех случаях счет ведут к осту (Е) или весту (W) от 0° до 180°.
Для исключения многозначности направлениям в полукруговой системе счета придают наименования:
Вначале буквами N или S обозначают ту часть истинного меридиана, от которой отсчитывают направление;
– затем цифрами показывают значение угла в градусах;
– в конце записи буквой E или W показывают направление, в сторону которого ведут счет.
Например: N65°Е, S135° W.
Четвертная система счета направлений
 В четвертной системе плоскость истинного горизонта линиями NS и EW делится на четыре четверти: NE, SE, SW и NW.
В четвертной системе плоскость истинного горизонта линиями NS и EW делится на четыре четверти: NE, SE, SW и NW.
За начало счета направлений (0°) принимают северную (N) или южную (S) часть истинного меридиана. Счет ведут от N или S в сторону Е или W от 0° до 90° в каждой четверти:
В NE четверти от N к Е (по часовой стрелке) от 0° до 90°;
– в SE четверти от S к Е (против часовой стрелки) от 0° до 90°;
– в SW четверти от S к W (по часовой стрелке) от 0° до 90°;
– в NW четверти от N к W (против часовой стрелки) от 0° до 90°.
Для исключения многозначности при записи четвертных направлений указывают наименование четверти, в которой это направление расположено.
 Например: NE70,1°; SW38,3°; NW76,9°; SE70,0°.
Например: NE70,1°; SW38,3°; NW76,9°; SE70,0°.
На практике, если заданные направления указаны в разных системах счета, то их предварительно приводят к какой-либо одной системе. При этом используют различные схемы пересчета направлений, одна из которых показана на рисунке.
ИСТИННЫЕ КУРСЫ И ПЕЛЕНГИ. КУРСОВОЙ УГОЛ.
 Для обеспечения безопасности плавания судна в море необходимо уметь определять направление его движения относительно заданного пути, а также направления на навигационные опасности и видимые с судна ориентиры.
Для обеспечения безопасности плавания судна в море необходимо уметь определять направление его движения относительно заданного пути, а также направления на навигационные опасности и видимые с судна ориентиры.
Направления в море определяются относительно Истинный меридиан
– меридиан, проходящий через место нахождения наблюдателя” style=”cursor: help; font-weight:800; font-style:italic; color:#2e44b7;
text-decoration:none”> истинного меридиана
(N и) и называются истинными направлениями
. Зная положение истинного меридиана любое направление на поверхности земли (моря) можно определить углом между нордовой частью этого меридиана и направлением на предмет. При этом величина этого угла измеряется в градусах по круговой системе, т.е. от 0° до 360°.
Направление движения судна определяется истинным курсом.
Истинным курсом
(ИК) называется горизонтальный угол между северной частью истинного меридиана и Диаметральная плоскость
– вертикальная продольная плоскость симметрии корпуса судна” style=”cursor: help; font-weight:800; font-style:italic; color:#2e44b7;
text-decoration:none”> диаметральной плоскостью
судна по направлению его движения, измеренный по ходу часовой стрелки.
Диаметральная плоскость, пересекаясь с плоскостью Истинный горизонт
– горизонтальная плоскость. проходящая через глаз наблюдателя” style=”cursor: help; font-weight:800; font-style:italic; color:#2e44b7;
text-decoration:none”> истинного горизонта
, образует линию курса судна. Таким образом, истинным курсом ИК является угол между северной частью истинного меридиана и линией курса. Отсчитывается истинный курс в круговой системе счета.
Направлением из точки наблюдения на объект называется линией пеленга
.
Направление с судна на естественные и искусственные объекты определяется истинным пеленгом.
Истинным пеленгом
(ИП) называется горизонтальный угол между северной частью истинного меридиана и направлением из точки наблюдения на объект, измеряемый по часовой стрелке.
Вертикальная плоскость, проходящая через место наблюдателя и место наблюдаемого объект, называется визирной плоскостью
.
Пересечение визирной плоскости с плоскостью истинного горизонта образует линию пеленга
, которая и является направлением на объект. Таким образом, истинным пеленгом
(ИП) является угол между северной частью истинного меридиана и линией пеленга. Отсчитывается истинный пеленг в круговой системе счета.
При решении отдельных задач используется направление, противоположное истинному пеленгу. Это направление называется обратным истинным пеленгом
(ОИП):
ОИП = ИП + 180°, если ИП
ОИП = ИП – 180°, если ИП > 180°.
ОИП является углом, который отсчитывается по часовой стрелке от нордовой части истинного меридиана, проходящего через ориентир, до направления с ориентира на судно
.
При решении задач, для которых особое значение имеет взаимное расположение курса судна и наблюдаемого объекта, измеряют курсовой угол
(КУ) – горизонтальный угол между диаметральной плоскостью судна и направлением на наблюдаемый объект, т.е. угол между носовой частью диаметральной плоскости судна и линией пеленга. Курсовой угол измеряется в круговой или полукруговой системе счета направлений.
В основном курсовые углы измеряют в полукруговой системе и для исключения многозначности им придают наименования, указывающие в сторону какого борта судна (правого или левого) вели счет.
Например: КУ= 15° л/б, КУ= 78° п/б.
При решении задач курсовые углы правого борта считают положительными
, а курсовые углы левого борта считают отрицательными
.
При решении некоторых задач требуется, чтобы курсовой угол был измерен в круговом счете. Счет при этом ведут от носовой части диаметральной плоскости судна вправо от 0° до 360°. Курсовой угол, измеренный в круговом счете, получил название отсчета курсового угла
(ОКУ). Связь между отсчетом курсового угла и курсовыми углами определяется выражениями:
Связь между отсчетом курсового угла и курсовыми углами определяется выражениями:
ОКУ = КУ п/б;
ОКУ = 360° – КУ л/б
Некоторым значениям курсовых углов традиционно присвоены наименования. Например, КУ = 90° – направление, перпендикулярное диаметральной плоскости корабля – называют траверзом
.
Математическая зависимость между истинными направлениями:
ИП = ИК + КУ;
ИК = ИП – КУ;
КУ = ИП – ИК.
При расчетах по этим формулам следует помнить о необходимости учитывать знак курсового угла. Другая особенность заключается в том, что истинный курс и истинный пеленг не могут иметь отрицательных значений. Если все же при решении задач будет получено отрицательное значение ИК или ИП, то его следует вычесть из 360°, а полученный результат считать положительным.
Двугранный угол между нордовой частью плоскости истинного меридиана и вертикальной плоскостью, совпадающей с линией перемещения судна называется путевым углом
(ПУ).
ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ
|
Пример 1: ИК = 270°, Решение: ИП=ИК+КУ=270°+130°= 400° Т.к. результат получился более 360°, то из полученного результата необходимо вычесть 360°: 400° – 360° = 40° Ответ: ИП = 40°. |
Пример 2: ИК = 40°, Решение: Т.к. углы левого борта считаются отрицательными, то ИП=ИК+КУ=40°+ (-70°)= -30° Т.к. получится отрицательный результат, необходимо к полученному значению необходимо прибавить 360°: –30° + 360° = 330° Ответ: ИП = 330°. |
Пример 3: ИП = 340°, Решение: КУ=ИП-ИК=340°- 40°=300°пр/б Т.к. значение КУ получилось более 180°, то необходимо от полученного результата отнять от 360°, а наименование КУ (пр/б) изменить на противоположное (л/б). 360° – 300° = 60° л/б Ответ: КУ = 60° л/б. |
МАГНИТНОЕ СКЛОНЕНИЕ. МАГНИТНЫЕ КУРСЫ И ПЕЛЕНГИ.
Магнитные полюсы Земли располагаются сравнительно недалеко от географических, но с ними не совпадают. Кроме того, они постепенно изменяют свое положение.
Вертикальная плоскость, проходящая через ось свободно подвешенной магнитной стрелки, находящейся под действием только сил земного магнетизма, называется плоскостью магнитного меридиана
, а линия от пересечения этой плоскости с плоскостью истинного горизонта – магнитным меридианом
.
Горизонтальный угол, на который в данной точке Земли плоскость магнитного меридиана отклоняется от плоскости истинного меридиана, называется магнитным склонением d
. Оно отсчитывается от северной части истинного меридиана N и к Е или к W от 0 до 180°. Если северная часть магнитного меридиана N м отклонена от N и к востоку, то склонение имеет наименование Е (восточное) и ему приписывается знак плюс (+), если к западу, то W (западное) со знаком “минус” (-).
В отдельных точках Земли магнитное склонение отличается как по значению, так и по наименованию. В большей части судоходных районов склонение не превышает 25°Е или W. Исключением являются высокие широты, где склонение может достигнуть десятков градусов, а между одноименными магнитными и географическими полюсами даже 180°.
Чтобы правильно использовать магнитный компас, необходимо знать значение магнитного склонения в районе плавания. С этой целью на навигационные карты наносят значение и наименование склонения. Однако наблюдениями установлено, что значение склонения не остается постоянным даже в одном и том же месте. В отдельных районах за год склонение может изменяться до 0,2-0,3°. Поэтому на навигационных картах указывают также год, к которому отнесено склонение, и значение его годового изменения.
Величина изменения магнитного склонения за один год называется годовым изменением магнитного склонения
и составляет, в среднем, от 0,0° до 0,2°.
В процессе любой работы с навигационной картой необходимо приводить магнитное склонение к году плавания. Для этого к значению магнитного склонения (cо своим знаком), указанному на карте прибавляют произведение величины годового изменения (также со своим знаком) и количества лет, прошедших от года, к которому отнесено склонение, до года фактического плавания, например:
На карте указано:
Магнитное склонение 5,7°Е, приведено к 2000 г. Годовое изменение 0,1° к W.
Тогда для плавания в 2014 г. магнитое склонение будет составлять:
d 2004 = + 5,7 + [(- 0,1 × (2014 – 2000)] = + 5,7 – 0,1 × 14 = 5,7 – 1,4 = 4,3°.
 Магнитным курсом
Магнитным курсом
(МК) называется угол в плоскости истинного горизонта, отсчитываемый от нордовой части магнитного меридиана по часовой стрелке до носовой части диаметральной плоскости судна.
Магнитным пеленгом
(МП) называется угол в плоскости истинного горизонта, отсчитываемый от нордовой части магнитного меридиана по часовой стрелке до направления на ориентир.
Угол, отличающийся от МП на 180°, называется обратным магнитным пеленгом
(ОМП): ОМП = МП ± 180° или МП = ОМП ± 180°.
Магнитные курсы и пеленги могут лежать в пределах от 0 до 360°.
Зная магнитное склонение в данном месте Земли, можно по известным магнитным направлениям получить истинные, а также решить обратную задачу. Зависимость между магнитными и истинными направлениями выражается формулами:
ИК = МК + d; ИП = МП + d; ОИП = ОМП + d;
МК = ИК – d; МП = ИП – d; ОМП = ОИП – d.
ДЕВИАЦИЯ МАГНИТНОГО КОМПАСА. КОМПАСНЫЕ КУРСЫ И ПЕЛЕНГИ.
Линия пересечения плоскости истинного горизонта с вертикальной плоскостью, проходящей через ось магнитной стрелки, находящейся под действием силы земного магнетизма и магнитных сил судового железа, называется компасным меридианом
.
Находящиеся в магнитном поле Земли детали набора и другие стальные и железные части судна постепенно намагничиваются и приобретают свойства магнита. В результате этого в окружающем судно пространстве возникает собственное магнитное поле, действие которого складывается с магнитным полем Земли. Магнитная стрелка судового компаса устанавливается по равнодействующей сил обоих полей, вследствие чего отклоняется от направления магнитного меридиана.
Горизонтальный угол, на который плоскость компасного меридиана отклоняется от плоскости магнитного меридиана, называется девиацией магнитного компаса d
.
Девиация отсчитывается от северной части магнитного меридиана N м к Е (со знаком “+”) или W (со знаком “-“) от 0 до 180°.
На каждом курсе девиация у судовых компасов различна. Это объясняется тем, что при изменении курса меняется положение судового железа относительно магнитных стрелок компаса. Кроме того, после поворота судна судовое железо частично перемагничивается, что также приводит к изменению магнитного поля судна.
 Компасным курсом (КК)
Компасным курсом (КК)
называется угол в плоскости истинного горизонта, отсчитываемый от нордовой части компасного меридиана по часовой стрелке до носовой части диаметральной плоскости судна.
Компасным пеленгом (КП)
называется угол в плоскости истинного горизонта, отсчитываемый от нордовой части компасного меридиана по часовой стрелке до направления на ориентир.
Угол, отличающийся от КП на 180°, называется обратным компасным пеленгом ОКП
:
ОКП = КП ± 180° или КП = ОКП ± 180°
Компасные курсы и пеленги могут быть в пределах от 0 до 360°.
Зависимость между компасными и магнитными направлениями:
МК = КК + d
; МП = КП + d
; ОМП = ОКП + d
;
КК = МК – d
; КП = МП – d
; ОКП = ОМП – d
.
Между КК, КП и КУ ориентиров при круговом счете сохраняется следующая зависимость:
КП = КК + КУ;
КК = КП – КУ;
КУ = КП – КК.
ПОПРАВКА МАГНИТНОГО КОМПАСА.

Алгебраическая сумма девиации и магнитного склонения, на величину которой компасные направления отличаются от истинных, называется поправкой магнитного компаса:
Δ
К = d
+ d
Девиацию и склонение берут со своими знаками, а именно:
Если северный конец магнитной стрелки отклонен от истинного меридиана вправо (к востоку), то склонение и девиация называются восточными и считаются положительными, т.е. в формулы подставляются со знаком “+”.
Если же северный конец магнитной стрелки отклонен от истинного меридиана влево (к западу), то склонение и девиация называются западными и считаются отрицательными, т.е. в формулы подставляются со знаком “-“.
Задачи, связанные с переходом от компасных курсов и пеленгов к истинным, называются исправлением румбов
, а задачи, связанные с переходом от снятых с карты истинных кусов и пеленгов к компасным – переводом румбов
.
Формулы исправления румбов:
ИК = КК + d
+ d или ИК = КК + Δ
К
ИП = КП + d
+ d или ИП = КП + Δ
К
ОИП = ОКП + d
+ d или ОИП = ОКП + Δ
К
Формулы перевода румбов:
КК = ИК – d
– d или КК = ИК – Δ
К
КП = ИП – d
– d или КП = ИП – Δ
К
ОКП = ОИП – d
– d или ОКП = ОИП – Δ
К
Условные обозначения, используемые в навигационных задачах
N и – Истиный меридиан
– линия пересечения вертикальной плоскости, проходящей через географические полюсы Земли и место наблюдателя, с поверхностью Земли.
N м – Магнитный меридиан
– линия пересечения плоскости истинного горизонта с вертикальной плоскостью, проходящей через ось свободно подвешенной магнитной стрелки, находящейся под действием только силы земного магнетизма.
N к – Компасный меридиан
– линия пересечения плоскости истинного горизонта с вертикальной плоскостью, проходящей через ось магнитной стрелки, находящейся под действием силы земного магнетизма и магнитных сил судового железа.
КК – Компасный курс
–
угол между линией компасного меридиана N к и линией курса.
КП – Компасный пеленг
–
угол между линией компасного меридиана N к и линией пеленга.
МК – Магнитный курс
–
угол между магнитным меридианом N м и линией курса.
МП – Магнитный пеленг
–
угол между линией магнитного меридиана N м и линией пеленга.
ИК – Истинный курс
–
угол между линией истинного меридиана N и и линией курса.
ИП – Истинный пеленг
–
угол между линией истинного меридиана и линией пеленга.
d
– Девиация
–
угол между линией компасного меридиана N к и линией магнитного меридиана N м.
d
– Склонение
–
угол между линией магнитного меридиана N м и линией истинного меридиана N и.
Δ
К – Поправка компаса
–
угол между линией истинного меридиана N и и линией компасного меридиана N к.
ПУ – Путевой угол
–
угол между линией истинного меридиана и линией, совпадающей с направлением курса судна.
Истинные направления
.
Зная положение истинного
меридиана (NS) любое направление на поверхности земли (моря) можно определить
углом между нордовой частью этого меридиана и направлением на предмет. При этом
величина этого угла измеряется в градусах по круговой системе, т.е. от 0° до
360°.
Направление движения судна
определяется
положением его диаметральной плоскости (ДП). относительно нордовой части
истинного меридиана. Истинный курс судна (ИК). Угол между нордовой частью
истинного меридиана и диаметральной плоскостью судна называется истинным курсом
судна (рис. 165
).
Рис. 165.
Истинные направления
Истинный пеленг
(ИП). Угол между нордовой частью
истинного меридиана и направлением на наблюдаемый предмет называется истинным
пеленгом (рис. 165
). На практике судоводителю приходится иметь
дело с обратным истинным пеленгом (ОИП). ОИП = ИП ± 180°.
Курсовой угол.
(КУ). Угол между диаметральной плоскостью
судна и направлением на на блюдаемый пред мет называется курсовым углом
(рис. 165
). Курсовой угол с считывается от 0о до 180° и имеет
на менование: лево борта (л/б) или npавого борта (п/б), в зависимости от
нахождения предмета относительно ДП. В том случае, когда КУ = 90°, т.е.
направление на предмет перпендикулярно ДП, то этот КУ называется траверзом (┴).
Для расчета истинных направлений используются формулы:
ИП =
ИК+ КУ
КУ = ИП – ИК
ИК = ИП – КУ
При этом КУ п/б имеет знак “+”, а КУ л/б – знак ” – “. В связи
с тем, что Земля представляет собой огромный магнит с полюсами NM и SM, силы
магнетизма располагают стрелку компаса в плоскости магнитного меридиана. Эта
стрелка направлена одним концом на северный полюс, а другим на южный. Таким
образом, магнитный меридиан, проходящий через ось магнитной стрелки, не
совпадает с истинным меридианом и составляет с ним некоторый угол, который
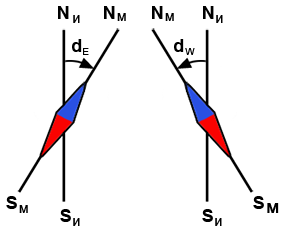
называется магнитным склонением (рис. 166
).
Рис.166
. Магнитное склонение
Магнитное склонение
(d) – угол между нордовыми частями
истинного и магнитного меридианов. Если d направлено к востоку, то оно
называется остовым (Е) и имеет знак”+”, если к западу – вестовым (W) и имеет
знак Магнитное склонение имеет различные значения для разных мест на земной
поверхности и, кроме того, это значение носит переменный характер. Конкретные
величины d и его годового изменения даны для данного района плавания на
навигационной морской карте. Учитывая, что карты издаются периодически,
судоводитель должен учесть изменение склонения за годы, прошедшие с года издания
карты до настоящего времени. Например, на карте указано, что магнитное склонение
(d 0) приведено к 1990 г. и в данном районе его значение равно 2°,5Е,
годовое уменьшение D d = 0°,1. Плавание осуществляется в 2000г.
Требуется привести склонение к году плавания.
где d – склонение, приведенное к году плавания;
n – число
лет (разность между годом плавания и годом, к которому приведено склонение на
карте);
∆d – годовое изменение склонения (имеет знак”+”, если увеличение,
знакесли уменьшение).
Примечание
: знак “+” ставится перед n, если d –
восточное и «-», если d – западное.
d 2000 = 2°,5 +
10(-0°,1) = + 1°,5
Ответ
: d 2000 = 1°,5Е.
Другой пример.
Зная величину магнитного склонения, легко рассчитать магнитные
направления при известных истинных направлениях:
МК = ИК-d,
МП = ИП-d
Эти формулы алгебраические, поэтому при расчетах нужно
учитывать знак склонения.
Примеры.
Решение
(рис. 167
): МК=45°
,0-(-5°,0)=50°,0;
МП=90°,0-(-5°,0)=95°,0;
КУ=ИП-ИК=МП-МК=90°,0-45°,0=95°,0-50°,0=+45°,0=45° п/б
Ответы
:
МК = 50°,0; МП=95°,0; КУ=45°п/б
Кроме земного магнетизма на магнитную стрелку компаса
действует судовое железо, которое имеет свойство намагничиваться от
Земли. В связи с этим стрелка компаса под воздействием судового железа
отклоняется от плоскости магнитного меридиана и направление, в котором
располагается ось стрелки на судне, называется компасным меридианом. Отклонение
стрелки компаса на судне от магнитного меридиана называется девиацией.
Девиация
(δ) – угол между нордовыми частями
магнитного и компасного меридианов (рис. 169
).
Рис.169
. Девиация
При отклонении N K к востоку от N M
девиация
имеет знак “+”, при отклонении N K к западу
от Nm девиация имеет знак ” – “. Величина девиации зависит от курса
судна
, а точнее от его положения относительно земных магнитных силовых
линий, и является величиной переменной. Если величина 8 путевого компаса на
судне превышает воспринимаются меры по ее уничтожению. Уничтожение девиации
производится специалистами с помощью магнитов и мягкой стали, помещаемых вблизи
от магнитного компаса. Однако уничтожить девиацию полностью невозможно. Поэтому
остаточную девиацию определяют на различных курсах и вносят в таблицу.
Существует достаточное количество способов определения остаточной девиации, но
все они основываются на том, что необходимо установить разность между известными
магнитными и взятыми по компасу пеленгами на маяк, створ, знак и т.п.
δ = МП – КП = ОМП –
ОКП;
δ = ИП – КП – d
Для определения остаточной девиации возле портов есть специально
оборудованные полигоны, имеющие по несколько (веера) створов с известными
магнитными пеленгами. Пересекая створы на главных и четвертных румбах (8
курсах), по компасу
берутся компасные пеленги (КП). Затем по
известной формуле рассчитываются значения δ
на этих курсах. Если нет веера
створов, то девиацию можно определить и по одному створу, магнитное направление
которого либо известно, либо рассчитывается по известному магнитному склонению
(d) и истинному направлению (ИП) створа. Принцип определения тот же, что и в
предыдущем случае.
Для определения девиации приемлем и такой способ:
Берется отдаленный предмет на расстоянии не менее 300 радиусов
циркуляции; судно (катер) на якоре разворачивается и через каждые 45° берется 8
КП; средний КП ()
принимается за МП;разница между рассчитанным МП и снятыми на 8 курсах КП покажет
значение 8 на каждом курсе. При определении девиации судоводителю необходимо
помнить, что при изменении курса картушка приходит в меридиан не сразу, поэтому
пеленгование после изменения курса следует производить спустя 3-5 минут. Для
получения значения девиации в любом районе плавания можно использовать
деревянную или резиновую лодку. Взятые с лодки, изготовленной из немагнитного
материала, пеленги на разных курсах будут соответствовать МП, а пеленги на те же
предметы с моторной лодки, катера, яхты из этой же точки дадут КП. Применяя уже
известную формулу, определяются значения 8, которые оформляются в табличной
форме.
Таблица девиации магнитного компаса
В таблицу вносятся сначала рассчитанные значения 8 на 8 румбах
(N, NE, Е, SE, S, SW, W, NW), а затем с помощью линейной интерполяции
определяются ее значения для остальных курсов. Нередко таблица составляется для
КК через каждые 10°, но для маломерных судов
достаточно
составить более укрупненную таблицу через 15°. При использовании табличных
данных для КК, не указанных в таблице, значения 8 рассчитываются с помощью
интерполяции. Например, нужно определить значение 8 для КК 25°. Из таблицы для
КК 15° δ = + 0°,5, для КК 30° δ = + 0°,8, т.е. на 15°(30° – 15°) Δδ = + 0°,3
(0°,8 – 0°,5). Таким образом, на 1° изменения КК в данном случае приходится
0,02° (0°,3: 15), а на 5° – 0°,1, на 10° – 0°,2. Значит, для КК= 25° значение δ
составит 0°,7(0°,5 + 0°,2; 0°,8 – 0°,1). В процессе эксплуатации судна,
определение девиации компаса следует производить как можно чаще.
Поправка компаса
. Алгебраическая сумма магнитного
склонения и девиации называется поправкой компаса. (ДК).
Другими словами, поправка магнитного компаса – это угол
заключенный между нордовыми частями истинного и компасного меридианов
(рис. 170
).
Рис. 170
. Поправка компаса.а
Исправление и перевод румбов.
Переход от компасных
направлений к истинным называется исправлением румбов, а переход от истинных к
компасным – переводом румбов.
В тех случаях, когда d и d известны, решение
задач по исправлению и переводу румбов не представляет сложности.
Примеры.
№ 1
. Дано:
КК = 45°
d = 10°,
0Е 8 = – 2°,0
ИК = ?
Решение:
(рис. 171
)
Δ
К = d +
8
Δ
К = +10о,0 + (-2о;0) =
+8°,0
Δ
К = КК + ДК = 45°,0 +
8°,0 = 53°,0
Рис.171.
№2. Дано:
ИП =
125°,0
d = 15°,0W
8 = – 5°,0
КП = ?
Решение: (рис. 172
)
Δ
К = d + 8 = -15°,0 + (-5°,0) = –
20°,0
Δ
П = ИП – ДК = 125°,0 –
(-20°) = 145°,0
Ответ:
Δ
К = 53°,0
Ответ
: Δ
П = 145°,0
Рис. 172
.
Для решения задач при помощи графического способа рекомендуется
использовать рис. 173
, а для исправления компасных и перевода
истинных направлений следующие схемы:
|
Наименование направлений |
Порядок определения |
|
|
Известен |
||
|
Снимается с компаса при пеленговании |
||
|
Из таблицы девиации |
||
|
Рассчитывается по алгебраической формуле DK |
||
|
Рассчитывается по формуле ИК = КК + ΔК |
||
|
Рассчитывается по формуле КП = ОКП ± 180° |
||
|
Рассчитывается по формуле ИП = КП + ΔК |
||
|
ФОРМУЛЫ (алгебраические) |
ИК = МК + d |
|
|
Снимается с карты |
||
|
Снимается с карты |
||
|
Снимается с карты и приводится к году плавания (d |
||
|
Рассчитывается по формуле МК = ИК – d |
||
|
Рассчитывается по формуле МП = ИП – d |
||
|
Из таблицы девиации для МК |
||
|
DK |
||
|
По формуле КК = ИК – ДК |
||
|
По формуле КК = ИК – ДК |
||
|
ФОРМУЛЫ (алгебраические |
КК = МК – δ; КП = МП – 8 ; |
Истинный пеленг на ориентир.
Дата добавления: 2014-09-05 | Просмотров: 2762
Румбовая система счета направлений <== предыдущая страница | Следующая страница ==> Проведение на карте линии заданного направления.
Для плоскости карты определение может звучать так – истинный пеленг – угол между направлением на север и направлением на предмет, отсчитываемый из точки местоположения нашего судна.
Истинный пеленг, также как и истинный курс, измеряется в круговой системе счета направлений от 0° до 360° по часовой стрелке и обозначается как ИП.
Говоря об истинном пеленге мы должны также помнить, что существует такое понятие, как обратный истинный пеленг. Обратный истинный пеленг – это угол, отличающийся от истинного пеленга на 180 градусов. И только. Следовательно, чтобы узнать величину обратного истинного пеленга (ОИП), нужно к величине истинного пеленга прибавить, если она меньше 180º (или отнять от неё, если она больше 180º) эти самые 180 градусов.
ОИП = ИП ± 180°
Существует ещё один вид направлений – это курсовые углы (КУ). Это очень употребительное в практике понятие.
Курсовым углом называется горизонтальный угол в плоскости истинного горизонта наблюдателя между носовой частью продольной оси судна (ДП судна) и направлением из точки наблюдения на объект (ориентир).
Здесь отсчёт производится от диаметральной плоскости судна в обе стороны, правую и левую, от нуля до 180 градусов.
 Курсовой угол.
Курсовой угол.
Кстати уже несколько раз мы употребили выражение диаметральная плоскость судна. Это плоскость, проходящая вдоль судна вертикально и условно делящая его на две одинаковые продольные половинки. Другими словами это – плоскость симметрии судна.
А для лучшего уяснения значения термина курсовой угол, мы разберём пример. Идём мы, скажем, где-то в море. Видим остров. Где? Например, слева . Значит, курсовой угол будет левого борта. (Понятно, что если справа – то правого борта).

Мысленно делим горизонт снова на градусы. Но только начало отсчёта – ноль градусов, будет не на севере, как мы делали до сих пор, а прямо по носу нашего судна. Мы также помним, что если прямо у нас – ноль, то точно слева и точно справа – по 90 градусов. А точно сзади – 180 градусов. Так вот направление на наш остров, отсчитываемое в градусах от нуля до 180 с указанием стороны отсчёта – это и есть курсовой угол. При вычислениях курсовому углу правого борта (КУ пр/б) придается знак «+», а курсовому углу левого борта (КУ л/б) – знак «–».
Если наш остров точно слева, то курсовой угол на него будет 90 градусов левого борта. Кстати говоря, состояние, когда предмет находится точно справа или точно слева на курсовых углах 90 градусов, называется, соответственно, траверзом правого или левого борта (обозначается – ┴). То есть остров – на траверзе левого борта.
Курсовые углы, равные 45° (45° пр/б, 45° л/б) – «крамбола».
Курсовые углы, равные 135° (135° пр/б, 135° л/б) – «раковина» или «подзор».
Важные сокращения, применяемые в навигации и математические соотношения, существующие между ними.
ИК – истинный курс судна
ИП – истинный пеленг
ОИП – обратный истинный пеленг
КУ – курсовой угол
пр/б – правый борт (правого борта)
л/б. – левый борт (левого борта),
Все истинные направления (ИК, ИП, КУ) связаны между собой соотношениями, которые легко установить из рисунка.
 Истинные направления
Истинные направления
ИП = ИК + КУ
ИК = ИП − КУ
КУ = ИП – ИК Формулы алгебраические (учитываются знаки КУ).
При решении задач по данным формулам необходимо знать, что:
Если при вычислениях ИК или ИП получается результатболее 360°, то из полученного результата необходимо вычесть 360°.
| Например: | ИК = 270°, КУ = 130° пр/б, ИП = ? ИП = ИК + КУ = 270° + 130° = 400° – 360° = 40° |
| Ответ: | ИП = 40°. |
Если при вычислениях ИК или ИП получится отрицательный результат, необходимо к полученному результатуприбавить 360°.
| Например: | ИК = 40°, КУ = 70° л/б, ИП = ? ИП = ИК + КУ = 40° + (–70°) = 40° – 70° = –30° + 360° = 330° |
| Ответ: | ИП = 330°. |
Если при вычислениях значение курсового угла (КУ) получается более 180°, то необходимо полученный результат отнять от 360°, а наименование КУ изменить на противоположное.
| Например: | ИП = 340°, ИК = 40°, КУ = ? КУ = ИП – ИК = 340° – 40° = 300° пр/б, 360° – 300° = 60° л/б |
| Ответ: | КУ = 60° л/б. |
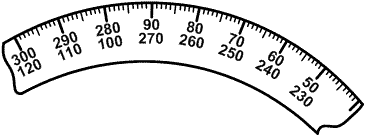
2.5.4. Устройство штурманского транспортира.
Транспортир штурманский служит для измерения направлений в море на карте относительно истинного меридиана и представляет из себя полукруг, разделенный на 180° с линейкой, расположенной по диаметру круга. На середину внутреннего среза линейки нанесен центральный штрих, являющийся центром транспортира. Полукруг транспортира разбит на градусные деления. Надписи десятков градусов сделаны двойными цифрами, обозначающими взаимно противоположные направления.
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 | 25 | 26 | 27 | 28 | 29 | 30 | 31 | 32 | 33 | 34 | 35 | 36 | 37 | 38 | 39 | 40 | 41 | 42 | 43 | 44 | 45 | 46 | 47 | 48 | 49 | 50 | 51 | 52 | 53 | 54 | 55 | 56 | 57 | 58 | 59 | 60 | 61 | 62 | 63 | 64 | 65 | 66 | 67 | 68 | 69 | 70 | 71 | 72 |
