 Что делать, если вы купили или достали каким-то образом эл.двигатель, на котором отсутствует бирка или шильдик с обозначением его мощности, частоты вращения и т.п.?
Что делать, если вы купили или достали каким-то образом эл.двигатель, на котором отсутствует бирка или шильдик с обозначением его мощности, частоты вращения и т.п.?
Либо на старом движке эти данные стерлись и стали нечитабельны.
При этом паспорта или какой-то другой технической документации у вас под рукой нет. Можно ли в этом случае узнать параметры двигателя самостоятельно?
Конечно же да, причем несколькими способами. Давайте рассмотрим самые популярные из них.
Первоначально для точного определения мощности потребуется выяснить синхронную частоту вращения вала, а перед этим узнать, где у нас начало каждой обмотки, а где ее конец.
Обозначение — маркировка обмоток двигателя
Обозначение — маркировка обмоток двигателя
По ГОСТ 26772-85 обмотки трехфазных асинхронных двигателей должны маркироваться буквами: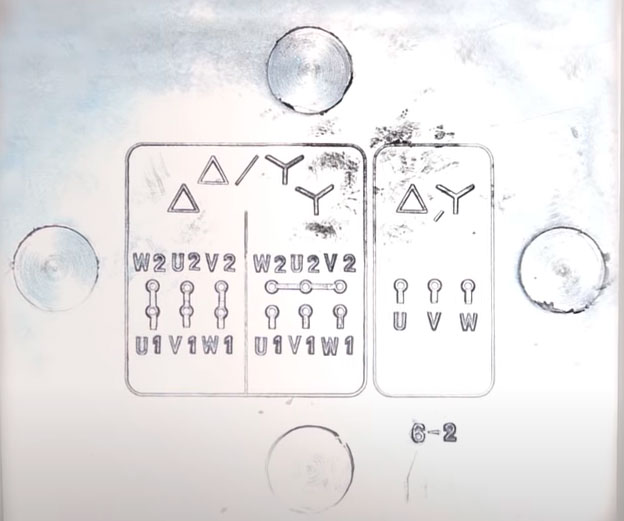
- U1-U2
- V1-V2
- W1-W2
По старому госту обозначение было несколько иным:
- С1-С4
- С2-С5
- С3-С6

Еще раньше можно было встретить надписи Н1-К1 (начало-конец обмотки №1), Н2-К2, Н3-К3.
На некоторых движках для облегчения распознавания концов обмоток их выводят из разных отверстий на одну или другую сторону. Как например на фото снизу.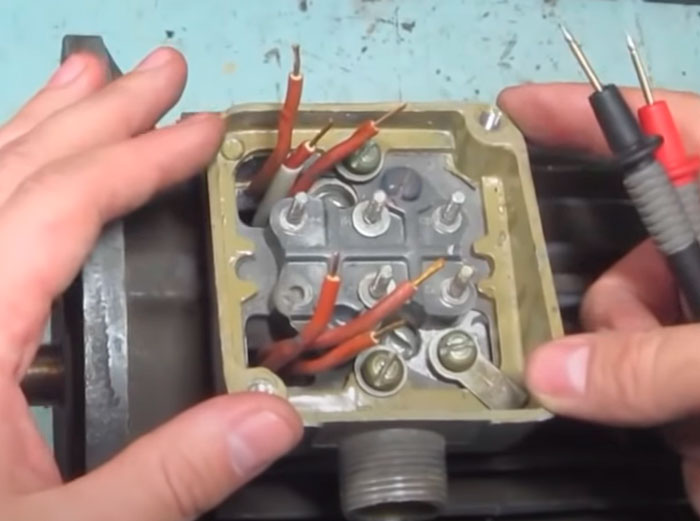
Но не всегда можно доверять таким выводам. Поэтому проверить все вручную никогда не помешает.
Если никаких обозначений и букв на барно нет, и вы не знаете, где у вас начало, а где конец обмотки, читайте инструкцию под спойлером.
2 метода определения начала и конца обмоток двигателя (для раскрытия нажмите на плюсик)
В помощники берете мультиметр и устанавливаете его в режим замера сопротивления.
Одним щупом дотрагиваетесь до любого из шести выводов, а другим поочередно прикасаетесь к остальным пяти проводам, тем самым, ища соответствующую пару.
При ее нахождении на табло мультиметра должна высветиться цифра, показывающее некое сопротивление в Омах.
В остальных случаях с другими проводами сопротивление будет равняться бесконечности (обрыв).
Отмечаете данную обмотку бирками и переходите к оставшимся проводам. Таким нехитрым способом буквально за одну минуту можно «вызвонить» концы всех обмоток.
Однако это еще не все. Главная проблема заключается в том, что вы пока не знаете, какой из двух выводов является началом обмотки, а какой ее концом.
Для того, чтобы это выяснить, соединяете между собой по два вывода от разных обмоток. То есть, условное начало V1 первой обмотки, соединяем с условным концом второй обмотки — U2.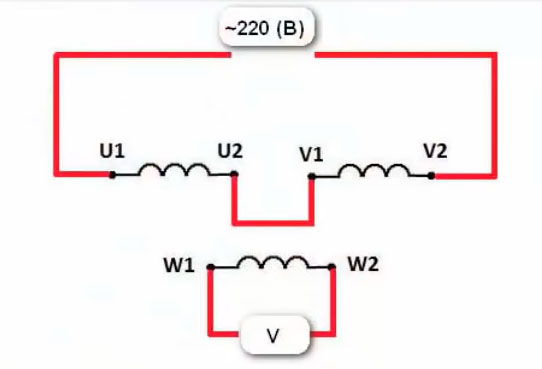
При этом у вас пока нет точной информации начало это или конец. Вы их сами так промаркировали для себя, чтобы сделать последующие замеры.
На другие концы этих двух обмоток (U1 и V2) подаете переменное напряжение 220В или меньше. Зависит это от того, на какое напряжение рассчитан ваш движок.
Смысл всего этого действия – замерить какое напряжение появится на концах третьей обмотки W1-W2. Это так называемый метод трансформации.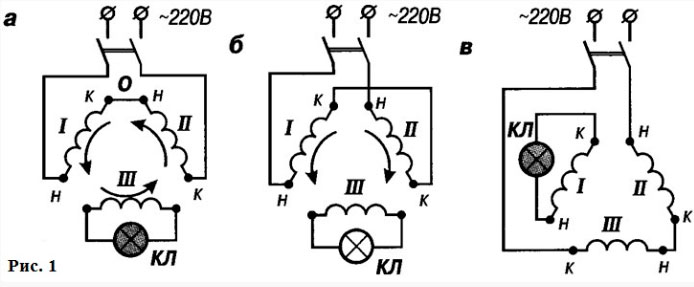
Если между W1-W2 будет какое-то значение (10-15В или больше), значит первые две обмотки у вас включены согласовано, то есть правильно. Все подписанные концы V1-V2, U1-U2 вы угадали верно.
Бирки на них менять не нужно.
Если же напряжение между W1-W2 будет очень маленьким или его вообще не будет, то получается, что первые две обмотки вы включили по встречной схеме (неправильно). Бирки на одной из обмоток придется поменять местами.
Разобравшись с двумя фазами переходим к третьей. Здесь процедура та же самая. Соединяете между собой условные начало и конец W1 и U2, а на U1 и W2 подаете 220V.
Замеры делаете между выводами V1 и V2. Если угадали, то двигатель может даже запуститься на двух фазах, ну или по крайней мере между V1 и V2 будет несколько вольт.
Если нет, то просто поменяйте местами бирки W1 и W2.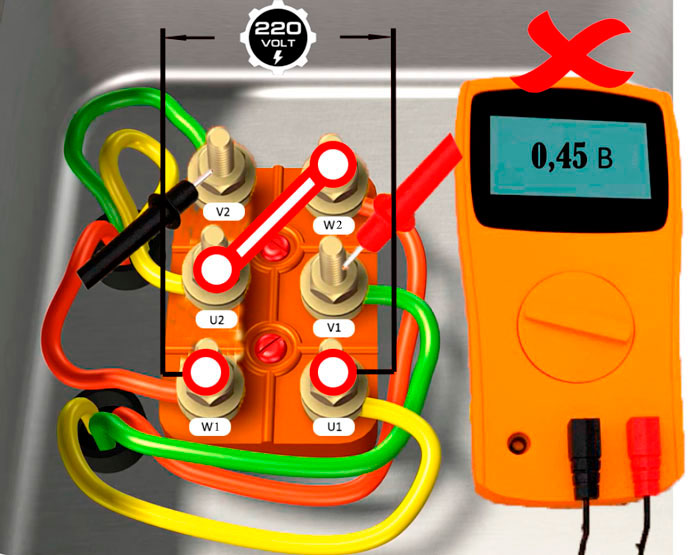
Второй метод определения начала и конца обмоток еще более простой.
Сперва находите три разные обмотки, как было указано выше. Соединяете их последовательно (условный конец первой с началом второй U2-V1, а конец второй с началом третье V2-W1).
На два оставшихся вывода U1-W2 подаете напряжение 220В. После этого поочередно подносите лампочку к концам каждой из обмоток (U1-U2, V1-V2, W1-W2).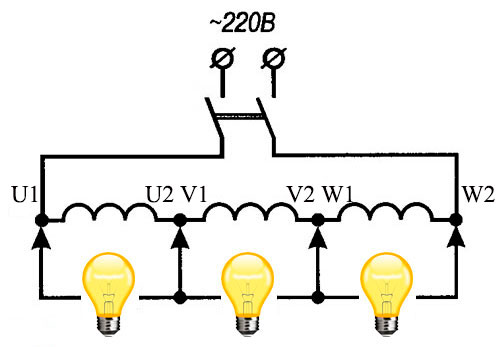
Если она горит везде с одинаковой яркостью, то вы угадали со всеми выводами.
Если яркость будет отличаться, это говорит о том, что данная обмотка перевернута по отношению к двум другим.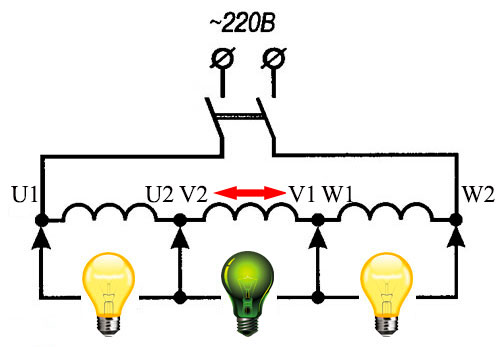
На ней бирки нужно поменять местами. Вообще-то по ТБ с лампочкой в качестве контрольки уже давно запрещено работать, поэтому вместо нее лучше используйте мультиметр с функцией замера напряжения.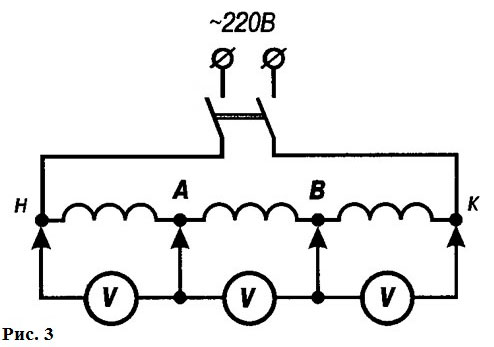
Как узнать частоту вращения вала двигателя
Как узнать частоту вращения вала двигателя
Для определения частоты по первому способу вам потребуется обычный китайский стрелочный мультиметр (аналоговый, не электронный!).
Определять частоту нужно при положении переключателя мультиметра в режиме измерения тока (100мА). Далее подключаете измерительные щупы в соответствующие разъемы:
- один в COM (общий)
- другой в V, Ом, мА (замер напряжения, сопротивления, тока)

Вскрываете распредкоробку БРНО (блок расключения начала обмоток движка).
Обязательно отключаете питание и проверяете на клеммах отсутствие напряжения!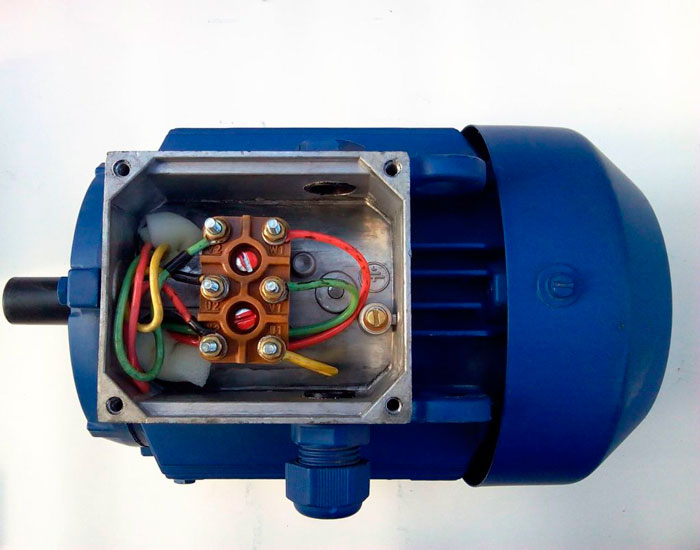
После этого одним щупом дотрагиваетесь до начала обмотки (любой), а другим до провода, являющегося концом этой же обмотки. Чтобы ничего не перепутать ориентируйтесь по обозначениям на бирках.
Вручную медленно проворачиваете вал на один оборот. В этот момент стрелка на мультиметре начнет отклоняться от своего нулевого значения.
Причем несколько раз. Вам нужно посчитать количество таких отклонений. Что это в итоге дает?
Дело в том, что количество отклонений на один оборот вала соответствует количеству полюсов и напрямую связано с синхронной частотой вращения двигателя (1500 об/мин, 3000 об/мин и т.д.)
Вот таблица такой зависимости:
Помимо такого простейшего есть и более технологичный способ определения частоты вращения вала.
Определение числа оборотов двигателя по диктофону на смартфоне
Определение числа оборотов двигателя по диктофону на смартфоне
Для этого вам понадобится современный смартфон с установленной на нем программой диктофона.
При этом запись должна сохраняться и отображаться в графическом виде. Такое к примеру умеет делать прога TapeMachine.
Если у вас подобной нет, придется записать файл в формате mp3, после чего открыть его на компьютере в аудиоредакторе. Дабы ничего не скачивать, воспользуйтесь популярными онлайн сервисами.
Кладете смартфон рядом с двигателем и запускаете движок на холостом ходу. После чего к валу, где должна стоять шпонка, прикладываете жало отвертки.
Диктофон в этот момент должен фиксировать и записывать исходящие звуки ударов отвертки о ребра прорези под шпонку. Если у вас на валу установлен ролик, то можно на конец вала накрутить медную проволоку, а вместо отвертки взять кусок плотного картона (наждачку).
Удары в этом случае будут передаваться от проволоки к картонке. Поработав секунд десять, двигатель можно выключать.
После чего приступаете к анализу графической записи. Тонкая полоса — это звук работы вала.
Большие пики – моменты ударов отвертки. Выберите из всей записи наиболее удачный отрезок и посчитайте количество пиков в 1-ой секунде.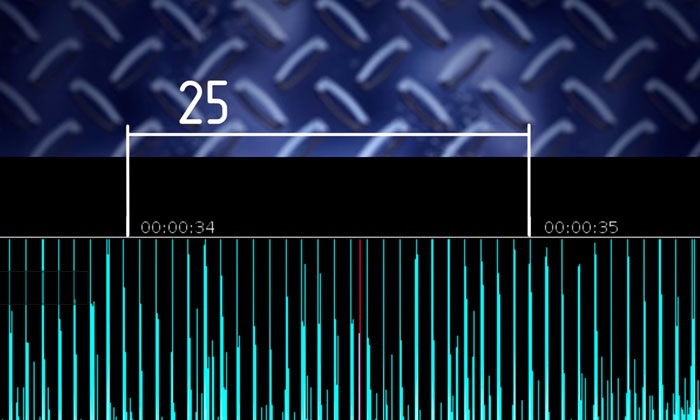
Допустим, их получилось 25шт. В минуту это дает 25*60=1500 оборотов.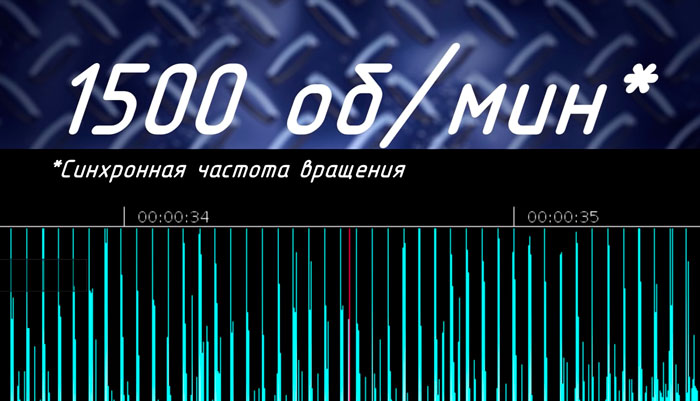
Это и есть ваша синхронная частота вращения вала.
Определение мощности по габаритам
Определение мощности по габаритам
Итак, частоту вращения мы узнали, переходим к самой мощности. Для этого вам нужно измерить габаритные размеры движка.
Что сюда входит?
- диаметр вала
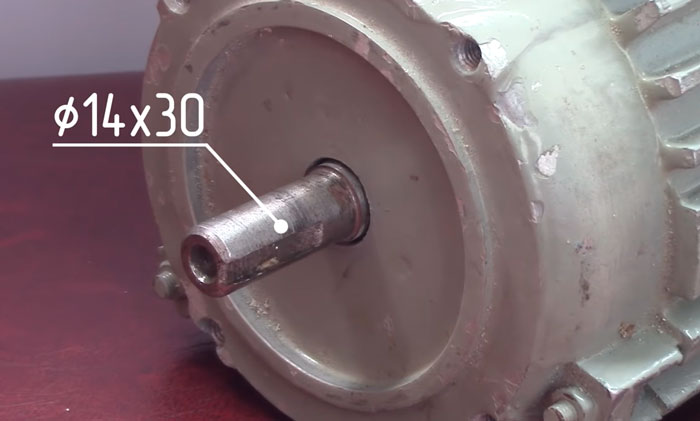
- длина вылета вала
- его высота над лапами (высота оси вращения)
- расстояние между лапами (длина, ширина)
Если у вас движок фланцевый, в этом случае необходимо сделать: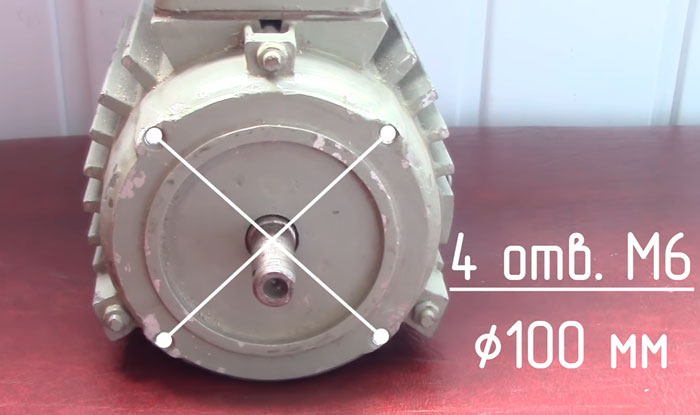
- замер диаметра фланца
- а также диаметр самих отверстий на фланце
Для более точных замеров используйте штангенциркуль, а не линейку. Получив и записав результаты, переходим к заводским табличным данным. Вот эти параметры:
Таблица 1 – Определение мощности по валу двигателя
Таблица 2 – Определение мощности по расстоянию между лапами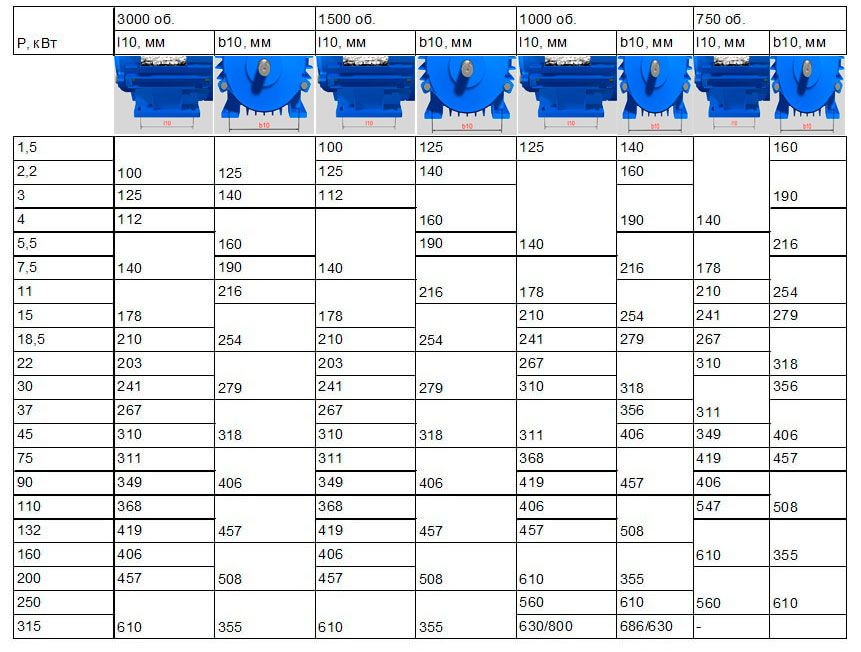
Таблица 3 – Определение мощности по диаметру фланца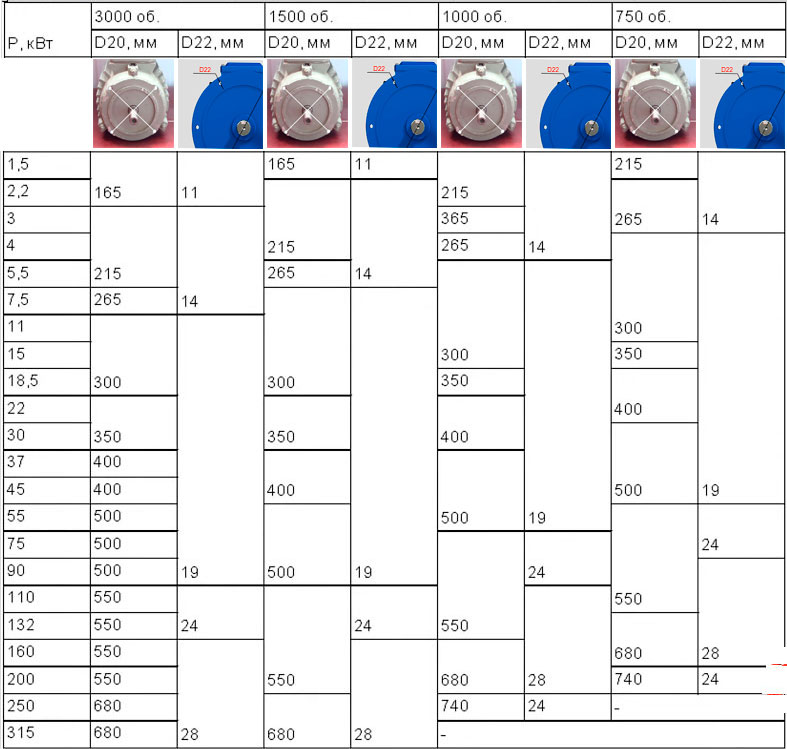
Сравнив полученные цифры с табличными данными, вы без какого-либо подключения к эл.сети узнаете мощность вашего движка.
Определение мощности по току
Определение мощности по току
Если у вас “в поле” нет под рукой вышеуказанных таблиц, зато имеются токоизмерительные клещи, рассчитать мощность электродвигателя можно по результатам замеров при его работе под напряжением.
Для этого отключаете рубильник питания агрегата и вскрываете брно. Провода в нем уложены как правило очень плотно, чтобы подлезть к ним клещами, придется их временно распрямить и развести между собой.
С самих клемм ничего откидывать не нужно. После этого включаете эл.двигатель под напряжение и даете ему несколько минут поработать под нагрузкой (не на холостом ходу!)
Токоизмерительными клещами обхватываете одну из фаз и записываете данные замера.
Помимо тока нужно знать еще и фактическое напряжение. Измерение делаете между фаз приходящего кабеля питания.
Далее, чтобы вычислить мощность, воспользуйтесь известной формулой:

Подставив в нее данные (U в киловольтах!, а ток в амперах) вы узнаете полную мощность движка в кВа. При этом следует учесть, что мощность эл.двигателя не зависит от схемы соединения обмоток статора, будь то треугольник или звезда.
Просто вы получите другие данные по току и напряжению, значение же самой мощности останется прежним.
Дабы узнать мощность электродвигателя в кВт, т.е. на валу, достаточно умножить полученное значение на cosϕ (коэфф. мощности=0,75-0,85) и на КПД (0,75-0,95).

Если у вас нет точных данных этих величин (что чаще всего и наблюдается), подставьте усредненные параметры:
- cosϕ=0,8
- ⴄ=0,85
Полученный результат округляете до целого и узнаете искомую мощность.
Источники – //cable.ru, Кабель.РФ
Судя по комментариям, у меня на канале собралось много профессионалов-электриков. Вот практический вопрос – как определить обороты разобранного двигателя?

Понятно, что это можно оценить по диаметру вала и в сравнении с другими аналогичными движками. Можно, в конце концов, посмотреть на шильдик .
Но если эти способы не подходят, и перед нами разобранный движок, как на фото?
Немного теории
Согласно известной формуле, скорость вращения двигателя равна 60F/P, где F = 50 Гц – частота питающей сети, Р – количество пар полюсов статора.
Увидеть и посчитать полюса двигателя можно, сняв переднюю или заднюю крышку.
Но как их посчитать?! Вот главный вопрос!
Подскажите с комментариях, прошу помощи!
Если посчитать пары полюсов обмотки
Если их посчитать, то дальше по теории:
Если Р = 1, то на каждую фазу будет одна обмотка, содержащая по 2 катушки, итого для трех фаз – 6 катушек.
При количестве пар полюсов Р = 2 скорость вращения будет 1500 об/мин, и так далее.
Реально – не так
Стоит сказать, что реальная скорость вращения отличается от расчетной за счет механических потерь и скольжения электромагнитного поля. У маломощных двигателей под нагрузкой рабочая скорость может быть ниже на 10-15 % от расчетной.
P.S. Фото шильда этого движка у меня есть, и скорость я знаю. Но хочется услышать ваши ответы)))
Статьи в тему производства:
Некоторые мои статьи на Дзене про электродвигатели и пром.оборудование:
Минутка Юмора
Картинку прислал читатель. Как важно в рекламе привлечь внимание!
Если интересно – подписывайтесь, лайкайте, пишите комменты – я всё читаю, на всё реагирую!
Если интересны темы канала, заходите также на мой сайт – https://samelectric.ru/ и в группу ВК – https://vk.com/samelectric
Как рассчитать скорость в зависимости от оборотов двигателя и выбранной передачи

Немного из школьного курса математики и геометрии — как рассчитать скорость в зависимости от оборотов двигателя и выбранной передачи.
Для этого необходимо знать размерность шин и передаточные отношения главной пары и передач в коробке передач…
Формулы:
Диаметр колеса: Ширина шины, м х Профиль, % х 2 + Диаметр обода, дюймов х 2,54/100
Пример: шина 195/65R15: 0,195 х 0,65 х 2 + 15 х (2,54 / 100) = 0,63 м
Используя формулу диаметра колеса, можно посчитать на сколько изменится клиренс, поделив изменение диаметра на 2
Окружность колеса: Диаметр колеса х число Пи (3,14)
Пример: 0,63 м х 3,14 = 1,98 м
Используя формулу окружности колеса, можно посчитать на сколько процентов изменятся показания одометра и спидометра при замене дисков и/или резины, поделив новое значение окружности на старое и отняв единицу, и умножив полученное значение на сто
Скорость автомобиля при 1 000 об/мин на выбранной передаче: Окружность колеса делим на произведение передаточного отношения главной пары и передаточного отношения выбранной передачи, полученное число умножаем на 60 (минут в часе) и делим на 1 000 (метров в километре), далее полученное число умножаем на число оборотов двигателя в минуту (в нашем случае 1 000 об/мин)
Пример: [1,98 / (3,8 х 1 (пятая передача))] х (60 / 1 000) х 1 000 = 31 км/ч
Технические данные для расчетов (Hyundai Elantra MD 1.6 MPi 6AT на шинах 195/65R15):

Непосредственно сами расчеты (Hyundai Elantra MD 1.6 MPi 6AT на шинах 195/65R15):

* Максимальная мощность на этом двигателе достигается при 6 300 об/мин, максимальный крутящий момент — при 4 850 об/мин
Источник
Расчет максимальной скорости автомобиля
Это будет не информационный пост как обычно, а некий мануал, калькулятор, который в зависимости от заданных типоразмеров шин, оборотов мотора и указанных передаточных чисел коробки рассчитает, какая будет скорость движения у автомобиля на передачи.

Конечно, калькулятор скорости автомобиля по передаточным числам и шинам производит расчет в идеальных (лабораторных) условиях. В реальных же условиях на конечную скорость автомобиля влияет очень много факторов, начиная от климатических условий и состояния дорожного полотна, и заканчивая настройкой мотора. Другими словами, калькулятор показывает потенциал коробки передач, до какой максимальной скорости она способна разогнать автомобиль.
Калькулятор расчет максимальной скорости автомобиля и КПП
| КПП #1 | КПП #2 |
| Диаметр (R) колеса * : | |
| Ширина колеса: | |
| Профиль колеса: | |
| Обороты двигателя: | |
| Передаточное число главной пары: | |
| Передаточное число 1 й передачи: | |
| Передаточное число 2 й передачи: | |
| Передаточное число 3 й передачи: | |
| Передаточное число 4 й передачи: | |
| Передаточное число 5 й передачи: | |
| Передаточное число 6 й передачи: |
Прогноз максимальной скорости движения авто на передаче:
| 1 я передача: | 23.68 | км/ч | 24.43 | км/ч |
| 2 я передача: | 36.34 | км/ч | 41.52 | км/ч |
| 3 я передача: | 52.47 | км/ч | 58.01 | км/ч |
| 4 я передача: | 69.1 | км/ч | 73.3 | км/ч |
| 5 я передача: | 90.21 | км/ч | 93.04 | км/ч |
| 6 я передача: | нет | км/ч | нет | км/ч |
* Для сликов маркированных в дюймах вводите только R колеса (вводить ширину и профиль не надо).
По умолчанию в калькуляторе расчета передаточных чисел КПП указаны характеристики коробок S4C (КПП #1) и S9B (КПП #2). Выбрал эти коробки не случайно, т.к. первая устанавливалась на Civic EK9, а вторая считается самой длинной МКПП для Б-моторов.
На форуме есть несколько тем, посвященных Honda коробкам, из которых Вы можете узнать передаточные числа для калькулятора. Информация еще не полная, но со временем, усилиями сообщества обновим топики и сделаем полную подборку характеристик:
 — КПП и передаточные числа для моторов B серии;
— КПП и передаточные числа для моторов B серии;
— КПП и передаточные числа для моторов K серии;
— КПП и передаточные числа для моторов H серии;
— КПП и передаточные числа для моторов F серии.
—
В завершении поста, хочу заметить, что при установке на автомобиль дисков большего диаметра или шин отличных от стокового типоразмера, спидометр будет выдавать не совсем корректные данные. Единицы отдают его на калибровку, чтобы снимать точные показания, в 99.999% случаев автовладельцы оставляют все как есть. Чтобы узнать, насколько спидометр «обманывает» Вас, в блоге есть еще один полезный инструмент:
Источник
#Про максимальные скорости. Немного матчасти для сказочников и интересующихся.

нет, сколько можно читать одно и то-же:
» у меня 1,6 115 лс, едет 220 км/ч»
» Opel Astra GTC Z18XER 140 лс, валит 230 км/ч, дальше не разгонялся, страшно»
» Гольфы вообще валят, у бати 170 лс дизель, прёт 250″.
Подобные высказывания очень часто встречаются в интернете и на драйве. Из-за неправильно запрограммированного периметра колёс в ЭБУ и забегающего вперед спидометра.
Что из этого правда?
Огорчу всех, ни-че-го.

Для того, почему к сожалению собственное эго придется немного поубавить и некоторым придется все-же подойти поближе к писсуару, поскольку у них не такой длиный хер пенис как им кажется, попытаюсь вам немного рассказать сегодня.

Сперва заявим, что как правило заявленая мощность и момент производителя соответствуют действительности.
Правило R85 министерства автотранстпорта, сроительства и развития (Германия):
«при окончательной проверки продукции мощность обязана мерится при друх различных оборотах двигателя S1 +S2, которые служили как эталон замера мощности и макс. момента при контрольного образца допуска транспортного средства к эксплуатации. При этих оборотах S1 +S2 как минимум в одной точке измереные значения не имеют превышать или быть ниже показателей образца допуска дтс на 5%».
То есть показания мощности и момента с завода уже не могуть превышать заявленные на более чем 5 %.
Во вторых заявим, что спидометры никогда, никогда не имеют права показывать меньшую скорость чем настоящую. Но бОльшую могут- и показывают, так положено.
При скорости в 250 км/ч скорость может отличатся от реальной на до 30 км/ч!
Особенно негативно влияет неправильный индекс в эбу приборки. Ведь чем МЕНЬШЕ периметр колес, чем запрограммировано, тем бОльшую скорость показывает спидометр. На Астре H например есть 4 группы, которые программируются. Но никто из моих знакомых не парится с ними.

Проверяйте скорость по GPS. Это в данный момент более точный метод чем приборка. P-Box например делает очень точные замеры, основанные на GPS- для беглого взгляда хватит просто мобильного навигатора.

Но ведь есть еще много влияющих на скорость фактов.
Сопротивление воздуха.

Fl — сопротивление воздуха (N)
Cw — коэффициент лобового сопротивления
A- площадь лобовой поверхности
p — плотность воздуха (кг/м³)
v — скорость (м/с)
Дорожное сопротивление
На этом месте я упущу полное описание дорожного сопротивления. Кто хочет знать об этом точно, погуглите лекцию профессора Отта «Kraftfahrzeuge 1». Тут я лишь укажу примерно точную формулу коэффициента дорожного сопротивления на сухой дороге.
Коэффициент дорожного сопротивления fr:

Дорожное сопротивление FR — исходное от коэффициента и давления на ДП, которое производит ТС из-за своего веса.
FR — сила дорожного сопротивления (N)
Fn — сила давления ДП
fr — коэффициент дорожного сопротивления, бездименсионный.
Это сумма дорожного и воздушного сопротивления.
Диаграмма общего сопротивления:

С помощью этих даных и знания диаграммы КПП и момента мотора является возможным вычислить макс. допустимую скорость автомобиля.
Следующая диаграмма показывает Audi A3 1.8 T (8L). Автомобиль заявлен с 217 км/ч.
Линии сопротивления перекрещивается с линией силы тяги (нм) на 216 км/ч. Так что эта форма вычисления довольно точна.

И учитывайте — коэффициент сопротивления после 40 км/ч растет почти в квадрате к скорости!
С помощью так называемого short-cut- метода это можно вычислить быстрее и почти так-же точно. При этом методе используются уже известные данные автомобиля, чтобы вычислить неизвестные. С этой помощью можно просто вычислить фиктивную возможную скорость или нужную мощность для набора определённой скорости.
Силу воздушного сопротивления я уже описывал:
FL — сопротивление воздуха
Сw — коэффициент лобового сопротивления
A- площадь лобовой поверхности
pho — плотность воздуха (кг/м³)
v — скорость
Необходимая мощность — это сила F * расстояние s / время t
Cкорость v — это расстояние s / время t


Теперь можно вывести значения мозности для 2 разных скоростей:

Если сейчас поделить мощность1 на мощность2, то получим формулу для высчета фиктивной макс. скорости.

И как её использовать и вообще о чем это в реальной жизни?
А вот так оно выглядит:
Исходное ТС- ауди а3 (8L), 1.6, 102лс, Vmax — 189 км/ч
-Сколько мощности необходимо, чтобы она поехала 202 км/ч?
-По формуле 125 лс.
Ауди а3 1.8/125 лс заявлена с 202 км/ч
-Сколько мощности необходимо, чтобы она поехала 217 км/ч?
-По формуле 154 лс.
Ауди а3 1.8Т/150 лс заявлена с 217 км/ч
-Сколько мощности необходимо, чтобы она поехала 228 км/ч?
-По формуле 179 лс.
Ауди а3 1.8/180 лс заявлена с 228 км/ч
Как видите, довольно точно…
Кому этого всего много и голова пухнет от формул, и с математикой и физикой возится не хочется, выкладываю готовую таблицу exсel, любезно предоставленную клубом kaoscrew.
Просто задавайте площадь сопротивления, коэффициент и желаемую скорость или мощность и вы увидите, сколько лошадей необходимо иметь для достижения определенной скорости или какую скорость можно достичь. Для площади сопротивления, если она не известна, можете примерно помножить высоту*ширину авто.
И помните — подойдите поближе… Он не такой длинный как вам кажется )
Я надеюсь, что помог чуть развеять миф о валящих 240 км/ч гольфах и фокусах с 140 лс. ) )
Источник
Максимальная скорость, аэродинамика, мощность и момент (мат. часть)

Доброго времени суток, в прошлой записи Максималки Astra G на которую меня сподвигло большое количество сказочников я пропустил мимо практически всю физику. Видимо зря. Не то, чтобы меня это сильно беспокоило, но ввиду свободного времени в выходной и плохой погоды — решил состряпать статейку из нескольких копи-паст (источники вконце) и немножко отсебятины.
Всем остальным для общего развития не помешает почитать и подчерпнуть какие-то знания, или уточнить что-то, что вызывало сомнения. Возможно пригодится кому-то, чтобы объяснить своему товарищу, что » вы, батенька, пиздите » он не прав и немножко привирает. Потому что, даже грамотные и уважаемые люди после прошлой записи немного недопонимали основного. Цитата » Тебя сейчас бомбанет если я напишу что мой нексиевский 8миклоп с длинным коробасом 200 поедет, только скорость буду набирать примерно минут 20» Не бомбануло, он поедет столько-же сколько и с «коротким коробасом», почему? читаем про мощность и момент.
Часть 1. Коэффициент аэродинамического сопротивления Cx
Наверное, каждый слышал о том, что сила сопротивления воздуха пропорциональна квадрату скорости – столь быстро нарастает противодействие движению в процессе разгона. Впечатляет, но как это соотнести с параметрами автомобиля? Для этого нужно лишь перейти в термины механической работы, и тогда получится, что отбираемая от двигателя мощность находится аж в кубической зависимости от скорости! Только представьте, с каким трудом даются автомобилю последние десятки километров в час. В таких условиях даже значительная прибавка мощности мотора не в состоянии существенно увеличить максимальную скорость.
Таким образом, задача снижения лобового сопротивления – приоритетная задача не только для аэродинамики, но, в свете борьбы за экологию, и для всего автомобилестроения в целом.

Решение можно искать по двум направлениям. Первое – это уменьшение площади поперечного сечения автомобиля, иными словами, создание более узкого и низкого кузова. Путь весьма эффективный, ибо сопротивление воздуха напрямую зависит от размеров объекта, но, к сожалению, совершенно расходящийся с нынешней тенденцией к увеличению габаритов автомобилей. И увеличению, стоит отметить, немалому, ведь в моду активно входят кроссоверы, вторгающиеся даже в совершенно чуждый им сегмент спортивных, скоростных автомобилей, где требования к аэродинамике предельно высоки.
А значит остается второй и единственный вариант – оптимизация процесса обтекания кузова, критерием совершенства которого как раз и является коэффициент аэродинамического сопротивления Cx (или Cw, как иногда встречается в литературе).
Величина Cx определяется опытным путем. Факторов, влияющих на Cx автомобиля, несколько: во-первых, это внутреннее сопротивление, возникающее при прохождении воздуха через подкапотное пространство и салон, во-вторых, сопротивление трения между воздушным потоком и поверхностью кузова, и, в-третьих, сопротивление формы, проявляющееся главным образом в избыточном давлении перед автомобилем и разряжением позади него.
Внутреннее сопротивление составляет около 12% от общей величины, и пока особых успехов в этой области не наблюдается: напротив, все более и более мощные моторы современных автомобилей требуют все больше воздуха для охлаждения. Например, в пределе 300-сильный бензиновый двигатель выделяет в виде тепла около 450кВт – этого хватило бы для отопления нескольких особняков! Соответственно, растут размеры радиаторов, уплотняются моторные отсеки, увеличивается сопротивление воздуха… Существенные же улучшения здесь возможны лишь при переходе на более эффективные электродвигатели, но пока они так и остаются технологией будущего.
Сопротивление поверхностного трения так же вносит свой 10-процентный вклад в величину Cx. Вообще, наличие столь ощутимого трения между воздухом и кузовом может показаться странным, но оно действительно имеет место: прилегающий к поверхности слой воздуха сталкивается с микронеровностями покрытия и тормозиться — образуется так называемый пограничный слой. Пока это течение находится в ламинарном состоянии, то есть все его частицы движутся в одном направлении, толщина пограничного слоя невелика (около нескольких миллиметров) и сопротивление трения небольшое. Но с переходом в турбулентное состояние, когда поток «спотыкается» о более крупное препятствие, и траектории его частиц становятся хаотичными, пограничный слой расширяется, а вместе с ним увеличивается и трение – воздух словно становится более вязким. Таким образом, от разработчиков в данном случае требуется обеспечение гладкости кузова, дабы пограничный слой дольше оставался ламинарым. А для этого нужно уменьшать зазоры кузовных элементов, закрывать уплотнителями щели между деталями. Помогает и придание поверхностям небольшой кривизны – прилегающий поток ускоряется, давление в нем падает, и траектории частиц упорядочиваются. К сожалению, в целях экономии этими мерами в последнее время частично пренебрегают, например, уплотнители по периметру лобового стекла или вокруг фар сейчас встретишь нечасто.
И, наконец, сопротивление формы или сопротивление давления – главный фактор, определяющий значение Cx. Причина его возникновения понятна – спереди на автомобиль давит набегающий поток воздуха, а позади его «оттягивает» назад зона разряжения, образующаяся в результате отрыва потока от резко заканчивающегося кузова. Решение проблемы тоже, казалось бы, очевидно – нужно придать автомобилю такую форму, чтобы он плавно рассекал воздух и опять-таки плавно, без отрыва потока от поверхности, позволял ему сойтись позади себя. Но загвоздка в том, что в соответствии с такими требованиями автомобиль должен напоминать дирижабль (точнее, его половину, отрезанную в продольной плоскости), то есть иметь минимум граней и, главное, очень длинную, постепенно сужающуюся заднюю часть. Разумеется, о рациональной компоновке в данном случае говорить трудно.
Немножко о Cx ВАЗов.
Что может стандартный ВАЗовский двигатель и чего он не может.
Скоростные характеристики.
ВАЗ 2108-09-99-2115: Cx — 0,468; S (площадь лобового сопротивления) — 1,8
1100 карб. (39,7 кВт/54,4 л.с.) — 139, 35 км/ч.
1300 карб. (47 кВт/64,4 л.с.) — 147,42 км/ч.
1500 карб. (51,5 кВт/71,6 л.с.) — 152 км/ч.
1500 инж. (60 кВт/82,2 л.с) — 159,92 км/ч.
ВАЗ 2110: Cx — 0,348; S (площадь лобового сопротивления) — 1,93
1500 инж. 8-кл. (56 кВт/76,7 л.с.) — 168,54 км/ч.
1500 инж. 16-кл. (69 кВт/94,5 л.с.) — 180,69 км/ч
Для достижения «зубилом» скоростного барьера в 200 км/ч. необходима мощность двигателя 160 л.с, «десятке» потребуется поменьше — 130 л.с. Другие «контрольные точки» —
170 км/ч — 100 л.с (2108)/ 80 л.с (2110)
180 км/ч — 120 л.с (2108)/ 95 л.с (2110)
190 км/ч — 140 л.с (2108)/110 л.с (2110)
Будьте реалистами. Законы физики обмануть невозможно. Для преодоления каждых «лишних» 10 км/ч на максимальных скоростях «зубилкам» требуется около 20 л.с, «матрешкам» — 15 (Дальше — еще больше: сопротивление растет пропорционально квадрату скорости) Хвастливые утверждения о достижении на стандартных авто ВАЗ скорости 200 (300) км/ч. могут вызвать лишь улыбку. Cx Нивы 0.536 поэтому я дико ржал с мифического родственника одного из коментаторов, который 170 на ней ехал. 137 максималка НИВЫ.

Барьер 300 км/час требует от двигателя минимум 390 лошадиных сил и двигаться на таких скоростях могут только спортивные авто либо седаны огромной по 600+лс мощности.
400 км/час. Даже имея двигатель мощностью 1000 лошадиных сил не каждый суперкар может развить эту скорость ведь сопротивление воздуха на таких скоростях так велико что для преодоления каждых 10 км/час приходиться добавлять к мощности двигателя около 100 лошадей.

Часть 2. Мощность и крутящий момент
Часто эксперты автомобильных изданий, рассказывая о выдающейся динамике машины, в первую очередь превозносит огромный крутящий момент двигателя, оставляя мощности роль второго плана. Мол, благодаря именно моменту машина ровно и напористо разгоняется в широком диапазоне оборотов и скоростей. Особенно востребовано это качество на высших передачах, – ведь тяговые силы и ускорения на них в любом случае не столь велики, как на первой или второй передаче. А для безаварийного движения в потоке транспорта возможность быстро прибавить скорость зачастую играет судьбоносную роль. Ездить на таком автомобиле даже психологически легче. И все же, когда нужно быстрей разогнаться, что важней – мощность или крутящий момент?
Сразу отметим: чаще всего эти два параметра «конфликтуют»… в головах журналистов, охотно повторяющих признанные публикой «истины» без какого-либо их анализа. На самом же деле смешно рассматривать мощность в отрыве от крутящего момента и наоборот. Первая показывает энергию, ежесекундно вырабатываемую двигателем, тогда как крутящий момент – всего лишь силовой фактор, показывающий, как нагружен при работе коленчатый вал.
Тут впору вспомнить школьную физику. Нарисуйте круг радиуса R – это будет сечение вала – и приложите к нему «касательную» силу F.

Крутящий момент этой силы М = F • R. За один оборот вала сила F пройдет путь 2πR – и выполнит работу: А = F • R • 2π = М • 2π. А работа за n оборотов: А = М • 2π • n. Если n – число оборотов в минуту, то работа за одну секунду – то есть, мощность – составит N = М • 2πn /60.
Выражение 2π n /60 = 0,1047 n = ω – угловая скорость вала. Итак, N = М • 0,1047 n (Формула [1]).
Но мы имеем дело не только с вращающимися деталями, но и движущимися линейно. В этом случае в формуле (1) момент М заменим силой F, а угловую скорость ω – линейной v. Получим: N = F • v (Формула [2]).
Эти формулы равноправны. Замерив, например, тяговую силу колес, умножим на достигнутую машиной скорость – и найдем затрачиваемую мощность. Но если крутящий момент на ведущей оси умножить на угловую скорость колес, получим то же самое.
Итак, мощность – это работа (или энергия) израсходованная или произведенная за 1 секунду. Конечно, о «законе сохранения энергии» знает каждый. Говоря по пионерски, она «не возникает из ничего», но и не исчезает, не оставив следа. Так, лишь около четверти тепловой энергии, получаемой двигателем от сгорания топлива, превращается в механическую, соответствующая мощность (эффективная) тратится на движение машины. Большая же часть полученной в цилиндрах двигателя теплоты идет на «обогрев» окружающего нас мира.
Эффективная мощность тоже доходит до ведущих колес не вся – до 15 % ее может рассеять в виде тепла трение в узлах и агрегатах трансмиссии. Но для нас важней другое: если при открытом дросселе (или при полной подаче топлива в дизель) двигатель выдает на колеса сколько-то киловатт, то это – его «потолок». Никакими простыми механизмами вроде коробок передач, редукторов и т. п. превысить эту величину невозможно – этого «закон сохранения» не допустит.
Итак, крутящий момент – это удобный для нас «инструмент», связывающий процессы в двигателе с трансмиссией машины и ведущими колесами. Но не более того
Из формулы (1) видно, что для получения достаточной мощности вовсе не обязателен огромный крутящий момент, ведь в произведении два сомножителя. Почему бы, например, не увеличивать мощность при постоянном моменте, наращивая угловую скорость в каком-то диапазоне оборотов? При этом мощность растет по оборотам линейно. А постоянство момента в заданном диапазоне – не чудо, которым некоторые почему-то восторгаются, а всего лишь признак постоянства тяговых сил. Если пренебречь сопротивлением воздуха (к примеру, на первой передаче оно невелико), то и ускорение машины в этом диапазоне постоянное. Это довольно удобно для водителя. Но спросим себя: если бы в начале диапазона момент был таким же, а ближе к пресловутым «верхам» стал больше, стал бы с таким «подхватом» автомобиль хуже? – Вряд ли. Разве только что-нибудь нарушилось бы в смысле экологии.
Мощность можно менять и при постоянных оборотах. Пример: мы ехали со скоростью 90 км/ч по горизонтальному шоссе, а с началом подъема, дабы сохранить скорость, пришлось больше открыть дроссель. Это увеличение момента в чистом виде.
Если пренебречь разницей в КПД передач (она невелика), то на любой передаче машину движут одни и те же киловатты. Но движут по-разному. Момент и тяговая сила на ведущих колесах подчиняются «золотому правилу»: сколько процентов выиграешь в скорости, столько потеряешь в силе. Это показывают рис. 1 и 2. Если двигатель заведомо слаб, с ним сильно не разгонишься.

Величины мощности N1 … N5 на ведущей оси не зависят от включенной передачи. Точки пересечения кривой Nсопр с кривыми N3, N4 и N5 дают информацию о максимальных скоростях автомобиля на этих передачах. Здесь самая скоростная на горизонтальной дороге в безветрие – четвертая.
Главные враги любителя скорости – не гаишники, а силы, тормозящие движение, – от этих не откупишься! Мощность сопротивления воздуха вкупе с мощностью шинных потерь показаны на рис. 1 линией Nсопр.
(Желающие посчитать, могут воспользоваться следующими формулами. Nсопр. = Nw + Nf. Мощность аэродинамических потерь Nw для автомобиля весом 15000 Н при плотности воздуха 1,25 кг/м3, Сх = 0,3 и лобовой площади S = 2 • м2 составляет: Nw = (0,3 • 2 • 1,25)/2 • v3 = 0,375 v3 Вт. А мощность шинных потерь Nf = 0,015 • 15000 • v = 225 v Вт. При 100 км/ч Nсопр составляет лишь 14,5 кВт. А при 200 км/ч – 77 кВт. Разница впечатляет?)
Колеса автомобиля, борясь с мощностями сил сопротивления, при максимальной скорости полностью расходуют мощность, получаемую от двигателя. Но ее характеристика (например, показанная кривой N4 на рис.1) при полностью открытом дросселе похожа на гору с округлой макушкой, тогда как характеристика мощности сопротивлений Nсопр. поднимается как крутая парабола. Чтобы полностью использовать арсенал мощности двигателя – и получить максимум скорости V4 (на горизонтальной трассе, без ветра), передаточное число трансмиссии и размер шин подбирают так, чтобы кривая Nсопр пересекла кривую N4 возле вершины. Максимальные скорости на третьей и пятой передачах (V3 и V5) существенно ниже. Но на спуске или с ветром вдогон выгодней может стать пятая передача, а на подъеме или с ветром в лоб – третья.
Другие враги скорости – подъем дороги и встречный ветер. Подъем с углом всего 1,5% добавит к потерям в шинах еще столько же. Но еще коварней ветер. Его скорость сложится со скоростью машины относительно дороги, – и уже эту сумму в расчете затрат мощности надо возвести в куб! При скорости по спидометру 36 км/ч (10 м/сек) и ровном встречном ветре 5 м/сек мощность Nсопр вырастет лишь на 0,9 кВт, а вот при 180 км/ч (50 м/сек) – аж на 15,5 кВт

Так зависит крутящий момент (М1…М5) или тяговая сила (Fтяг 1 …Fтяг 5) на ведущей оси от включенной передачи. При коэффициенте сцепления шин с дорогой 0,7 ведущая ось, нагруженная половиной веса машины (Gавтом = 15000 н), может создать реальную тяговую силу не больше Fмакс. доп. = 5250 Н.
На рис.2 величины крутящего момента М1…М5, а заодно и теоретические тяговые силы F1…F5 на ведущей оси, показаны одними и теми же кривыми, – ведь тяговые силы пропорциональны моментам. Величины сил – на вертикальной оси справа. Но тут важно учесть следующее.
Разгоняет машину не вся тяговая сила, а лишь избыточная – то есть разница между полной тяговой силой колес и сопротивлением воздуха. Отношение этой силы к весу машины академик Чудаков назвал динамическим фактором D. На первой передаче сопротивление воздуха мало, его можно не учитывать – считать, что машину разгоняет полная сила Fтяг.1. Но отталкиваться от дороги сильней, чем позволяет сцепление шин, невозможно! Если, например, ведущая ось несет половину веса машины – 7500 Н, то при коэффициенте сцепления φ = 0,7 тяговая сила не может превысить 35% ее веса. Это неплохо согласуется с такой официальной характеристикой любого автомобиля как предельно возможный угол подъема. С «моноприводом» трудно получить больше. Правда, у машины с задним приводом на подъемах ведущие колеса несколько догружаются весом машины, а вот передний тут невыгоден. Лучшая схема, но сложная и дорогая, – полный привод (конечно, не с такой скромной мощностью, как у «Нивы» или УАЗа!).
Если избыточная сила (на первой передаче, например) слишком велика, машина «шлифует» дорогу. Дело нелепое, нужно перейти на следующую передачу. А вот при разработке нового авто конструктор учитывает высокую мощность двигателя и ее следствие – тяговые силы в передаточных числах трансмиссии. Передачи проектируются как достаточно «длинные», расширяющие диапазон скоростей при достаточных ускорениях. А это значит, что и при более высоких скоростях действуют нужные тяговые силы (или моменты) на колесах. Иначе говоря, реализуется весь арсенал мощности! Значит, она все же важнее.
Споры на тему влияния мощности-момента ведутся давно, и конца им не видно. Вроде бы сто раз уже объясняли самыми разными способами, что тут к чему, а воз и ныне там. Вызывает неподдельный интерес, откуда все же берется заблуждение и почему оно такое устойчивое?
Причин видится две. Одна из них в том, что мощность есть функция от момента. Зависимость мощности от момента стоит барьером, который преодолеть оказывается непросто. Что странно. Поскольку очевидность того, что мощность есть функция не только от момента, но и от оборотов, не оспаривается, и тот факт, что у разных двигателей бывает весьма большой разброс по соотношению мощности к моменту, также не подвергается сомнению. То есть существует молчаливое согласие с тем, что мощность есть функция от двух аргументов — оборотов и момента, но при этом зависимость от оборотов как бы игнорируется. Почему?
А в этом и есть вторая, главная причина заблуждения. И ключевая фраза здесь: «Человек совершенно может не иметь понятие про мощность.А вот разницу в ускорении на 3 и 4 передаче он вполне способен почувствовать.» Ясно, что на динамику автомобиля оказывают большое влияние и передаточные числа КПП. На графике 1 видны кривые мощности двигателя, смещенные в зависимости от разных передаточных чисел и кривая сопротивлений. Видно, что с ростом передаточного числа динамика резко возрастает. Это очевидно и вопросов не вызывает. Странно, что не менее очевидный факт, что бОльшая часть времени при разгоне приходится вовсе не на 1 и 2 передачи, а на 3-4, при этом упускается из виду.
При разгоне здравомыслящий водитель пользуется всеми четырьмя передачами и весьма широким диапазоном частот вращения двигателя. При этом редко задумывается о том, что динамика разгона на высокой скорости мала и плохо ощущается, но именно на нее и приходится львиная доля времени разгона (по той простой причине, повторю, что на высших передачах динамика хуже и потому занимает больше времени). Хорошо ощущается динамика разгона на низших передачах, в диапазоне низких и средних оборотов (дальше водитель двигатель раскручивает редко). И что выходит? А выходит, что «низовой», моментный двигатель дает ощущение уверенного и бодрого разгона по той простой причине, что легко и весело страгивает и начинает разгонять автомобиль. А по достижении скорости ощущения становятся слабыми, и оценить разницу в разгоне 100- и 120 сильного моторов на 4-5 передачах, способен не каждый. Потому и кажется, что момент определяет динамику. По ощущениям. А ощущениям человек склонен верить очень сильно, даже вопреки логике и здравому смыслу.
Проповедующие формулировку «скорость определяется мощностью, а динамика разгона — моментом двигателя» могут убедиться в своем заблуждении, решив простую задачу.
Вводные
1. Равномерный подъем на некоторую высоту равносилен равномерному ускорению, поскольку увеличивает потенциальную энергию тела mgh*. (что можно объяснить — чем с большей высоты упадет, тем сильней ударится).
2. Поднимаем равномерно груз весом 75 кг на высоту 1 м за 1 с.
3. Имеется черный ящик, в котором спрятан мотор неизвестной природы и, возможно, редуктор с КПД=1.
Вопросы.
1. Какая мощность должна быть в моторе, спрятанном внутри черного ящика?
2. Какой момент должен быть в моторе, спрятанном внутри черного ящика?
Подъем указанного груз на нужную высоту за время аналогичен разгону по горизонтали той же массы с ускорением g в 0.5 степени или корень из g.
Если ускорение определяется моментом — просто назовите цифру
Если ускорение определяется мощностью — тоже просто назовите цифру
Если цифру назвать не удается, значит параметр может быть самым разным и роли не играет.
Вы можете разгонять тело с заданным ускорением (или поднимать его вверх), меняя крутящий момент по своей прихоти (и устанавливая каждый раз соответствующий редуктор). Вы можете отталкиваться от параметров редуктора, и всякий раз требуемый момент будет меняться и зависеть от передаточного отношения этого редуктора. Но всегда мощность будет оставаться одной и той же, неизменной величиной — для подъема груза 75 кг на 1 м за 1с понадобится ровно одна лошадиная сила или 0,73549875 кВт
Это практически ответ на цитату про «длинный коробас».
Касаемо тех-же астр, если воткнуть коробку F18 с 2.0 вместо F13 на какой-нибудь 1.2 или 1.4 двигатель, максималка не увеличится, а скорее даже и снизится, потому что передаточные числа подобраны оптимально для более мощного двигателя и с ними не будет достигнута оптимальная мощность на более слабом двигателе.
Повторюсь: будьте реалистами. Законы физики обмануть невозможно.
Если дочитали до конца, то молодцы. Надеюсь кому-нибудь когда нибудь пригодится этот материал. Можно кидать на него ссылку особо упёртым в своей правоте гонщикам))) Хотя таких людей ничего не переубедит.
Источник
Содержание
- Частота вращения: формула
- Синхронные и асинхронные электромашины
- Синхронная скорость
- Скольжение
- Регулировка частоты вращения
- Двигатели постоянного тока
- Номинальная скорость вращения
- Регулировка скорости
- Видео
- Электрический двигатель постоянного тока
- Устройство и описание ДПТ
- Статор (индуктор)
- Ротор (якорь)
- Коллектор
- Принцип работы
- Типы ДПТ
- По наличию щеточно-коллекторного узла
- По виду конструкции магнитной системы статора
- Управление
- Механическая характеристика
- Регулировочная характеристика
- Области применения
- Преимущества и недостатки
- Видео в дополнение к написанному
- Регулирование скорости оборотов двигателя постоянного тока
- Методы регулировки
- Заключение
- Электроника для всех
- Блог о электронике
- Двигатель постоянного тока. Характеристики и регулирование
- 106 thoughts on “Двигатель постоянного тока. Характеристики и регулирование”
Частота вращения: формула
При проектировании оборудования необходимо знать число оборотов электродвигателя. Для расчёта частоты вращения есть специальные формулы, различные для двигателей переменного и постоянного напряжения.

Синхронные и асинхронные электромашины
Двигатели переменного напряжения есть трёх типов: синхронные, угловая скорость ротора которых совпадает с угловой частотой магнитного поля статора; асинхронные – в них вращение ротора отстаёт от вращения поля; коллекторные, конструкция и принцип действия которых аналогичны двигателям постоянного напряжения.
Синхронная скорость
Скорость вращения электромашины переменного тока зависит от угловой частоты магнитного поля статора. Эта скорость называется синхронной. В синхронных двигателях вал вращается с той же быстротой, что является преимуществом этих электромашин.
Для этого в роторе машин большой мощности есть обмотка, на которую подаётся постоянное напряжение, создающее магнитное поле. В устройствах малой мощности в ротор вставлены постоянные магниты, или есть явно выраженные полюса.
Скольжение
В асинхронных машинах число оборотов вала меньше синхронной угловой частоты. Эта разница называется скольжение «S». Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- f – частота сети,
- p – число пар полюсов,
- s – скольжение.

Формула расчёта скорости асинхронного двигателя
Такие устройства есть двух типов:
- С короткозамкнутым ротором. Обмотка в нём отливается из алюминия в процессе изготовления;
- С фазным ротором. Обмотки выполнены из провода и подключаются к дополнительным сопротивлениям.
Регулировка частоты вращения
В процессе работы появляется необходимость регулировки числа оборотов электрических машин. Она осуществляется тремя способами:
- Увеличение добавочного сопротивления в цепи ротора электродвигателей с фазным ротором. При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений;
- Подключение дополнительных сопротивлений в цепи статора. Применяется для запуска электрических машин большой мощности и для регулировки скорости маленьких электродвигателей. Например, число оборотов настольного вентилятора можно уменьшить, включив последовательно с ним лампу накаливания или конденсатор. Такой же результат даёт уменьшение питающего напряжения;
- Изменение частоты сети. Подходит для синхронных и асинхронных двигателей.
Внимание! Скорость вращения коллекторных электродвигателей, работающих от сети переменного тока, не зависит от частоты сети.
Двигатели постоянного тока
Кроме машин переменного напряжения есть электродвигатели, подключающиеся к сети постоянного тока. Число оборотов таких устройств рассчитывается по совершенно другим формулам.
Номинальная скорость вращения
Число оборотов аппарата постоянного тока рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- U – напряжение сети,
- Rя и Iя – сопротивление и ток якоря,
- Ce – константа двигателя (зависит от типа электромашины),
- Ф – магнитное поле статора.
Эти данные соответствуют номинальным значениям параметров электромашины, напряжению на обмотке возбуждения и якоре или вращательному моменту на валу двигателя. Их изменение позволяет регулировать частоту вращения. Определить магнитный поток в реальном двигателе очень сложно, поэтому для расчетов пользуются силой тока, протекающего через обмотку возбуждения или напряжения на якоре.

Формула расчёта числа оборотов двигателя постоянного тока
Число оборотов коллекторных электродвигателей переменного тока можно найти по той же формуле.
Регулировка скорости
Регулировка скорости электродвигателя, работающего от сети постоянного тока, возможна в широких пределах. Она возможна в двух диапазонах:
- Вверх от номинальной. Для этого уменьшается магнитный поток при помощи добавочных сопротивлений или регулятора напряжения;
- Вниз от номинальной. Для этого необходимо уменьшить напряжение на якоре электромотора или включить последовательно с ним сопротивление. Кроме снижения числа оборотов это делается при запуске электродвигателя.
Знание того, по каким формулам вычисляется скорость вращения электродвигателя, необходимо при проектировании и наладке оборудования.
Видео
Источник
Электрический двигатель постоянного тока
Эра электродвигателей берёт своё начало с 30-х годов XIX века, когда Фарадей на опытах доказал способность вращения проводника, по которому проходит ток, вокруг постоянного магнита. На этом принципе Томасом Девенпортом был сконструирован и испытан первый электродвигатель постоянного тока. Изобретатель установил своё устройство на действующую модель поезда, доказав тем самым работоспособность электромотора.
Практическое применение ДПТ нашёл Б. С. Якоби, установив его на лодке для вращения лопастей. Источником тока учёному послужили 320 гальванических элементов. Несмотря на громоздкость оборудования, лодка могла плыть против течения, транспортируя 12 пассажиров на борту.
Лишь в конце XIX столетия синхронными электродвигателями начали оснащать промышленные машины. Этому способствовало осознание принципа преобразования электродвигателем постоянного тока механической энергии в электричество. То есть, используя электродвигатель в режиме генератора, удалось получать электроэнергию, производство которой оказалось существенно дешевле от затрат на выпуск гальванических элементов. С тех пор электродвигатели совершенствовались и стали завоёвывать прочные позиции во всех сферах нашей жизнедеятельности.
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:

- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.
Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока.
Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.

Рисунок 2. Схемы подключения обмоток статора ДПТ
У каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.
 Рисунок 3. Ротор с тремя обмотками
Рисунок 3. Ротор с тремя обмотками  Рисунок 4. Якорь со многими обмотками
Рисунок 4. Якорь со многими обмотками
Подобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.

Рисунок 5. Схема электромотора с многообмоточным якорем
Коллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Самый простой коллектор состоит из двух, изолированных полукруглых пластин. Каждая из них в определённый момент контактирует со щёткой, с которой снимается напряжение. Одна ламель всегда подсоединена к плюсу, а вторая – к минусу. При повороте вала на 180º пластины коллектора меняются местами, вследствие чего происходит новая коммутация со сменой полярности.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.

Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Типы ДПТ
Существующие электродвигатели постоянного тока можно классифицировать по двум основным признакам: по наличию или отсутствию в конструкции мотора щеточно-коллекторного узла и по типу магнитной системы статора.
Рассмотрим основные отличия.
По наличию щеточно-коллекторного узла
Двигатели постоянного тока для коммутации обмоток, которых используются щёточно-коллекторные узлы, называются коллекторными. Они охватывают большой спектр линейки моделей электромоторов. Существуют двигатели, в конструкции которых применяется до 8 щёточно-коллекторных узлов.
Функции ротора может выполнять постоянный магнит, а ток от электрической сети подаётся непосредственно на обмотки статора. В таком варианте отпадает надобность в коллекторе, а проблемы, связанные с коммутацией, решаются с помощью электроники.
В таких бесколлекторных двигателях устранён один из недостатков –искрение, приводящее к интенсивному износу пластин коллектора и щёток. Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
По виду конструкции магнитной системы статора
В конструкциях синхронных двигателей существуют модели с постоянными магнитами и ДПТ с обмотками возбуждения. Электродвигатели серий, в которых применяются статоры с потоком возбуждения от обмоток, довольно распространены. Они обеспечивают стабильную скорость вращения валов, высокую номинальную механическую мощность.
О способах подключения статорных обмоток шла речь выше. Ещё раз подчеркнём, что от выбора схемы подключения зависят электрические и тяговые характеристики двигателей постоянного тока. Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Управление
Не трудно понять, что если изменить полярность напряжения, то направление вращения якоря также изменится. Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
Механическая характеристика
Рассмотрим график зависимости частоты от момента силы на валу. Мы видим прямую с отрицательным наклоном. Эта прямая выражает механическую характеристику электродвигателя постоянного тока. Для её построения выбирают определённое фиксированное напряжение, подведённое для питания обмоток ротора.

Примеры механических характеристик ДПТ независимого возбуждения
Регулировочная характеристика
Такая же прямая, но идущая с положительным наклоном, является графиком зависимости частоты вращения якоря от напряжения питания. Это и есть регулировочная характеристика синхронного двигателя.
Построение указанного графика осуществляется при определённом моменте развиваемом ДПТ.

Пример регулировочных характеристик двигателя с якорным управлением
Благодаря линейности характеристик упрощается управление электродвигателями постоянного тока. Поскольку сила F пропорциональна току, то изменяя его величину, например переменным сопротивлением, можно регулировать параметры работы электродвигателя.
Регулирование частоты вращения ротора легко осуществляется путём изменения напряжения. В коллекторных двигателях с помощью пусковых реостатов добиваются плавности увеличения оборотов, что особенно важно для тяговых двигателей. Это также один из эффективных способов торможения. Мало того, в режиме торможения синхронный электродвигатель вырабатывает электрическую энергию, которую можно возвращать в энергосеть.
Области применения
Перечислять все области применения электродвигателей можно бесконечно долго. Для примера назовём лишь несколько из них:
- бытовые и промышленные электроинструменты;
- автомобилестроение – стеклоподъёмники, вентиляторы и другая автоматика;
- трамваи, троллейбусы, электрокары, подъёмные краны и другие механизмы, для которых важны высокие параметры тяговых характеристик.
Преимущества и недостатки
К достоинствам относится:
- Линейная зависимость характеристик электродвигателей постоянного тока (прямые линии) упрощающие управление;
- Легко регулируемая частота вращения;
- хорошие пусковые характеристики;
- компактные размеры.
У асинхронных электродвигателей, являющихся двигателями переменного тока очень трудно достичь таких характеристик.
Недостатки:
- ограниченный ресурс коллектора и щёток;
- дополнительная трата времени на профилактическое обслуживание, связанное с поддержанием коллекторно-щёточных узлов;
- ввиду того, что мы пользуемся сетями с переменным напряжением, возникает необходимость выпрямления тока;
- дороговизна в изготовлении якорей.
По перечисленным параметрам из недостатков в выигрыше оказываются модели асинхронных двигателей. Однако во многих случаях применение электродвигателя постоянного тока является единственно возможным вариантом, не требующим усложнения электрической схемы.
Видео в дополнение к написанному
Источник
Регулирование скорости оборотов двигателя постоянного тока
С точки зрения регулирования скоростью вращения электродвигателей, интересно уравнение для электромеханических характеристик, соответствующее Второму закону Кирхгофа:
ω = U/C×Φ – ΥЯ /( C×Φ) 3 ×M
При описании технических характеристик электродвигателя скорость, выражаемая оборотами в минуту, зачастую называется частотой вращения ν по известному соотношению:
ω = 2p/T = 2pn
Поэтому эти две разноименные величины часто применяются в одном и том же смысле. Скорость w (частота ν) находится в прямой зависимости от напряжения питания U и в обратной от магнитного потока Ф. Исходя из приведенной выше формулы, возникает вывод, что скоростью можно управлять, регулируя сопротивление якоря, магнитный поток и напряжение питания.

Методы регулировки
Итак, различают три основных варианта регулирования скоростью:
- Изменением напряжения сети. Меняя подводимое питание можно управлять частотой вращения двигателя;
- Добавлением пускового реостата в цепь якоря. Регулируя сопротивление, можно уменьшить скорость вращения;
- Управлением магнитного потока. Двигатели с электромагнитами дают возможность регулировать поток путем изменения тока возбуждения. Однако нижний предел ν min ограничен насыщением магнитной цепи двигателя, что не позволяет увеличивать в большой степени магнитный поток.
К каждому из вариантов соответствует определённая зависимость механических характеристик.
Методы регулирования применительны к двигателям с различными:
- типами возбуждения;
- величиной мощности.
На практике в современных электрических моторах, в связи с недостатками и ограниченности диапазонов, рассмотренные методы не всегда применяются.
Это еще связано с тем, что машины отличаются довольно небольшими КПД, и к тому же не позволяют плавно увеличивать или уменьшать частоту вращения.
Электронные же схемы управления с регуляторами частоты, работающими от аккумуляторной батареи на 12 В, напротив, широко используются. Например, они очень актуальны для управления низковольтными электродвигателями 12 вольт в приборах автоматики, детских игрушках, электрических велосипедах, аккумуляторных детских автомобилях.

Принципиальной особенностью метода является то, что ток в цепи якоря и момент, развиваемый электродвигателем, зависят лишь от величины нагрузки на его валу. Регулировка осуществляется с помощью регулятора оборотов электродвигателя.
В течение очень долгого времени тиристорные преобразователи являлись единственным коммерчески доступными регуляторами двигателей. К слову сказать, они по-прежнему самые распространенные на сегодняшний день. Однако с появлением силовых транзисторов стали наиболее популярными регуляторы оборотов двигателя постоянного тока с широтно-импульсной модуляцией. Приведём для примера ниже схему, работающую от источника постоянного тока 12 В.
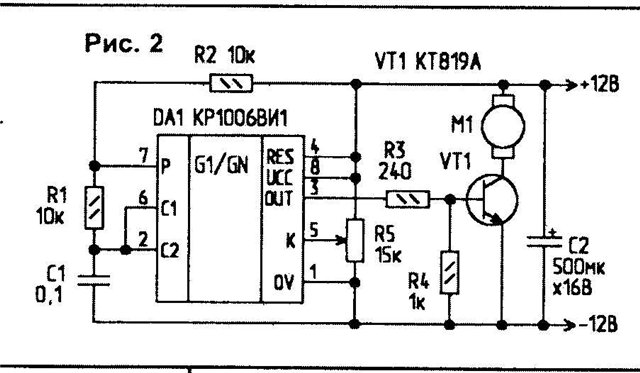
Схема на практике даёт возможность, к примеру, увеличивать либо уменьшать яркость свечения ламп накаливания на 12 вольт.
Последовательно-параллельное управление используется в ситуациях, когда два или более агрегата постоянного тока соединены механически. Схема с последовательным соединением электродвигателей, в которой общее напряжение делится на всех, используется для низкоскоростных приложений. Схема с параллельным соединением машин, имеющих одинаковое напряжение, используется в высокоскоростных применениях.
Заключение
Рассмотренный метод регулировки напряжения сети считается самым эффективным и экономичным вариантом, так как:
- им обеспечивается широкий диапазон изменения скоростей (wmin / wmax) и лучшие энергетические характеристики (КПД);
- он работает без каких-либо потерь мощности в силовой цепи якоря.
Управление осуществляется плавно, и по точности регулировка частоты вращения является весьма высокой.
Источник
Электроника для всех
Блог о электронике
Двигатель постоянного тока. Характеристики и регулирование
После предыдущего поста о мотор-редукторе мне пришло несколько вопросов по регулированию двигателя постоянного тока. Так что пора написать очередной пост 🙂 
Двигатель постоянного тока (ДПТ) это один из самых привычных и понятных электродвигателей, он изучается даже в школе, на физике. Он используется практически везде, где нужен малогабаритный моторчик, а также не спешит сдавать своих позиций и там, где мощность измеряется десятками киловатт. О нем и поговорим.
▌Конструктив и базовый принцип
Не буду тут особо распинаться, покажу картинку из википедии и укажу ряд основных узлов. Все остальное вы и так знаете и трогали своими руками.
1. Статор состоит из источника магнитного поля. Далеко не всегда это постоянный магнит, более того, постоянный магнит это скорей исключение, чем правило. Обычно все же это обмотка возбуждения. По крайней мере на всем, что больше кулака по размерам.
Работает все очень и очень просто. Обмотка якоря отталкивается от магнитного поля статора силой Ампера и совершает пол оборота, стремясь вывести эту силу на ноль и таки вывела бы если бы не коллектор, который ловко всех обламывает переключает полярность катушки и сила вновь становится максимальной. И так по кругу. Т.е. коллектор служит механическим инвертором напряжения в якоре. Запомните этот момент, он нам еще пригодится 🙂
Обычно в мелких моторчиках всего два полюса обмотки возбуждения (одна пара) и трехзубцовый якорь. Три зуба это минимум для запуска из любого положения, но чем больше зубцов тем более эффективно используется обмотка, меньше токи и более плавный момент, т.к сила является проекцией на угол, а активный участок обмотки проворачивается на меньший угол
▌Происходящие в двигателе процессы
Думаю многие из вас кто баловался с движками могли заметить, что у них есть ярко выраженный пусковой ток, когда мотор на старте может рвануть стрелку амперметра, например, до ампера, а после разгона ток падает до каких-нибудь 200мА.
Почему это происходит? Это работает противоэдс. Когда двигатель стоит, то ток который через него может пройти зависит только лишь от двух параметров — напряжения питания и сопротивления якорной обмотки. Так что предельный ток который может развить движок и на который следует рассчитывать схему узнать несложно. Достаточно замерить сопротивление обмотки двигателя и поделить на это значение напряжение питания. Просто по закону Ома. Это и будет максимальный ток, пусковой.
Но по мере разгона начинается забавная вещь, обмотка якоря движется поперек магнитного поля статора и в ней наводится ЭДС, как в генераторе, но направлена она встречно той, что вращает двигатель. И в результате, ток через якорь резко снижается, тем больше, чем выше скорость.
А если движок дополнительно еще подкручивать по ходу, то противоэдс будет выше питания и движок начнет вкачивать энергию в систему, став генератором.
▌Немного формул
Не буду грузить никого выводами, их найдете сами если захотите. Чтобы было поменьше матана рекомендую найти учебник по электроприводу для средних учебных заведений и годом выпуска подревней. От 50х-60х годов самое то 🙂 Там и картинки винтажные и расписано для вчерашнего выпускника сельской семилетки. Много букв и никакого грузилова, все четко и по делу.
Самая главная формула коллекторного двигателя постоянного тока:
- U — напряжение подаваемое на якорь
- Rя — сопротивление якорной цепи. Обычно за этот символ считают только сопротивление обмотки, хотя можно снаружи навесить резистор какой и он к ней приплюсуется. Тогда пишут как (Rя+Rд)
- Iя — ток в якорной цепи. Тот самый который замеряется амперметром при попытке измерять потребление движка 🙂
- Е — это противоэдс или ЭДС генератора, в генераторном режиме. Она зависит от конструкции двигателя, оборотов и описывается вот такой вот простой формулой
- Ce — одна из конструктивных констант. Они зависят от конструкции двигателя, числа полюсов, количества витков, толщин зазоров между якорем и статором. Нам она не особо нужна, при желании ее можно вычислить экспериментально. Главное, что она константа и на форму кривых не влияет 🙂
- Ф — поток возбуждения. Т.е. сила магнитного поля статора. В мелких моторчиках, где оно задается постоянным магнитом это тоже константа. Но бывает под возбуждение выведена отдельная обмотка и тогда мы можем ее менять.
- n — обороты якоря.
Ну и зависимость момента от тока и потока:
См — конструктивная констатнта.
Вот тут стоит обратить внимание, что зависимость момента от тока совершенно прямая. Т.е. просто замеряя ток, при неизменном потоке возбуждения, мы можем совершенно точно узнать величину момента. Это может быть важно, например, чтобы не сломать привод, когда двигло может развить такое усилие, что легко поломает то, что оно там вращает. Особенно с редуктором.
Ну и из этого же следует, что момент у машины постоянного тока зависит только от способности источника снабжать его током. Так что идеальный нерушимый сверхпроводящий движок вам на раз лом в узел завяжет, пусть даже он сам с ноготок будет. Только энергию подавай.
А теперь смешаем все это в кучу и получим зависимость оборотов от момента — механическую характеристику двигателя.

Если ее построить, то будет нечто следующее:

n — это обороты идеального холостого хода сферического двигателя в вакууме. Т.е. когда наш движок ну ваще халявит, момент равен нулю. Ток потребления тоже, естественно, ноль. Т.к. противоэдс равна напряжению. Чисто теоретический вариант. А вторая точка строится уже с каким-либо моментом на валу. Получается прямая зависимость оборотов от момента. А наклон характеристики определяется сопротивлением якорной цепи. Если никаких добавочных резисторов там нет, то это зовут естественной характеристикой.
Обороты идеального холостого хода зависят от напряжения и потока. Больше ни от чего. А если поток константа (постоянный магнит), то только от напряжения. Снижая напряжение вся наша характеристика параллельно смещается вниз. Уменьшили напряжение в два раза — скорость упала в два раза.
Если есть возможность менять поток возбуждения, то можно поднимать скорость выше номинальной. Тут зависимость обратная. Ослабляем поток — двигатель разгоняется, но либо падает момент, либо ему надо жрать больше тока.
Иной двигатель со снятием возбуждения может и в разнос пойти. Помнится сдавал я затянувшийся курсач по электроприводу, уже хрен знает спустя сколько времени после сессии. Вломы мне его делать было, ага 🙂 Ну и сидел в лаборатории, ждал препода. А там какие то балбесы, на курс ниже, лабу делали. Крутили движок вхолостую, а возбуждение к стенду приверчено было на соплях и слетело с клеммы. Движок в разнос пошел. У нас в лаборатории ЭПА ЮУРГУ все серьезно было, машины стояли нешуточные, по десятку киловатт и под сотню другую кг каждый. Все на суровом напряжении в 380 вольт.
В общем, когда эта дура взревела как монстр и стала рваться с креплений, я только и успел крикнуть, что все нахер от машины, вырубай к черту. Не успели, двигло сорвало с креплений, обмотка повылетала с пазов и движку пришел кирдык. Ладно никого не покалечило.
Впрочем, лабы привода это то еще развлечение было. У нас там и горело и взрывалось. Там я приобрел замечательные навыки чинить что угодно, чем угодно в сжатые сроки. В среднем, каждый успел по разу убить стенд наглухо, а лаба часто начиналась с починки паяльника, которым чинили осциллограф с помощью которого реанимировали убитый стенд.
Добавляя резисторы в якорную цепь мы можем увеличить наклон, т.е. чем больше грузим тем больше падает скорость. 
Метод плох тем, что резисторы в цепи якоря должны быть расчитаны на ток двигателя, т.е. быть мощными и будут греться зря. Ну и момент резко падает, что плохо.
Есть еще двигатели не независимого, а последовательного возбуждения. Это когда обмотка статора включена последовательно якорю. Не каждый двигатель так можно включить, обмотка возбуждения должна выдерживать ток якоря. Но у них возникает одно интересное свойство. При пуске возникает большой пусковой ток и этот пусковой ток является же током возбуждения, обеспечивая огромный пусковой момент. Механическая характеристика напоминает гиперболу с максимумом в районе нулевых оборотов.
А дальше, по мере разгона, момент падает, а обороты наоборот растут. И если нагрузку убрать с вала, то движок сразу же уходит в разнос. Такие движки ставят на тягловый привод в основном. По крайней мере ставили раньше, до развития силовой электроники. С места эта хрень рвет так, что все стритсракеры нервно закуривают.
▌Режимы работы двигателя постоянного тока
Направление вращения движка зависит от направления тока якоря или направления потока возбуждения. Так что если взять коллекторный двигатель и подключить обмотку возбуждения параллельно якорю, то он будет прекрасно вращаться и на переменном токе (универсальные двигатели, их в кухонную технику часто ставят). Т.к. ток будет одновременно меняться и в якоре и в возбуждении. Момент правда будет пульсирующим, но это мелочи. А для реверса там надо будет поменять полярность включения якоря или возбуждения.
Если нарисовать механическую характеристику в четырех квадрантах, то у нас будет нечто похожее на это:

Вот, например, характеристика 1 на I участке у нас машина работает как двигатель. Нагрузка растет и в определенный момент двигатель останавливается и начинает вращаться в обратную сторону, т.е. нагрузка обращает его вспять. Это тормозной режим, противовключение. Режим очень тяжелый, двигло греется просто зверски, но для торможения очень эффективный. Если же момент на валу сменит направление и пойдет вращать навстречу движку, то мотор сразу же выйдет на генерацию (IV участок).
Характеристика 2 это то же самое, только с обратной полярностью питающего напряжения двигателя.
А характеристика 3 это динамическое торможение. Оно же реостатное. Т.е. когда мы берем и просто коротим наш двигатель на резистор или сам на себя. Можете сами проверить, возьмите любой моторчик и покрутите его, а потом закоротите ему якорь и покрутите снова. На валу будет ощутимое усилие, тем больше, чем качественнее движок.
Кстати, драйвера двигателей вроде L293 или L297 имеют возможность включить реостатное торможение, подачей обоих ключей вверх или вниз. При этом якорь коротится через драйвер на шину земли или питания.
▌Бесколлекторные двигатели постоянного тока
Коллекторный движок он очень хорош. Он чертовски легко и гибко регулируется. Можно повышать обороты, понижать, механическая характеристика жесткая, момент он держит на ура. Зависимость прямая. Ну сказка, а не мотор. Если бы не одна ложка говна во всей этой вкусняшке — коллектор.
Это сложный, дорогой и очень ненадежный узел. Он искрит, создает помехи, забивается проводящей пылью от щеток. А при большой нагрузке может полыхнуть, образовав круговой огонь и тогда все, капец движку. Закоротит все дугой наглухо.
Но что такое коллектор вообще? Нафига он нужен? Выше я говорил, что коллектор это механический инвертор. Его задача переключать напряжение якоря туда сюда, подставляя обмотку под поток.
А на дворе то уже 21 век и дешевые и мощные полупроводники сейчас на каждом шагу. Так зачем нам нужен механический инвертор если мы можем сделать его электронным? Правильно, незачем! Так что берем и заменяем коллектор силовыми ключами, а еще добавляем датчики положения ротора, чтобы знать в какой момент переключать обмотки.
А для пущего удобства выворачиваем двигатель наизнанку — гораздо проще вращать магнит или простенькую обмотку возбуждения, чем якорь со всей этой тряхомудией на борту. В качестве ротора тут выступает либо мощный постоянный магнит, либо обмотка питаемая с контактных колец. Что хоть и смахивает на коллектор, но не в пример надежней его.
И получаем что? Правильно! Бесщеточный двигатель постоянного тока aka BLDC. Все те же няшные и удобные характеристики ДПТ, но без этого мерзкого коллектора. И не надо путать BLDC с синхронными двигателями. Это совсем разные машины и разным принципом действия и управления, хотя конструктивно они ОЧЕНЬ схожи и тот же синхронник вполне может работать как BLDC, добавить ему только датчиков да систему управления. Но это уже совсем другая история.
106 thoughts on “Двигатель постоянного тока. Характеристики и регулирование”
Я очень ждал статей про двигатели. Специалист по электроприводу научил нас как работать с AVR, а про моторчики нифига не написал. Еще будут статьи на эту тему?
Мне порвала шаблон обратная зависимость между магнитным потоком возбуждения и скоростью вращения. По формуле я вижу, что это так, но понять не могу. Особенно удивил уход вразнос при отключении обмотки возбуждения. Если нет магнитного потока статора, то от чего «отталкивается» ротор? Как двигатель может вообще работать в таком режиме?
Отталкивается от остаточного возбуждения. Намагниченности полюсов. Но ты обрати внимание, что момент там тоже уходит в ноль. Так что либо отталкиваться бешеным током, либо снижать момент до нуля.
Да, про момент я заметил. Понятно, что разгон будет происходить только без нагрузки и только, если источник питания способен выдать нужный ток.
Статьи может быть будут еще, не скажу. Я, на самом деле, за 7 лет изрядно эту тему подзабыл за неиспользованием. Особенно касаемо всякого продвинутого регулирования и динамики привода. Так что не такой я уж специалист по приводу 🙂
Можно и без продвинутого регулирования для начала. Меня совсем базовые вещи интересуют. Типа, какие бывают способы управления и, соответственно, какие драйверы их реализуют, чем отличаются, плюсы, минусы, подводные камни. Для коллекторных и бесколлекторных двигателей постоянного тока. На что следует обратить внимание при разработке схем с электродвигателями, чтобы не сжечь все нафиг. В общем, такая статья в раздел «Начинающим». Но и более емкие статьи я бы с удовольствием прочитал.
Ну базовые вещи я уже описал 🙂 А дальше додумываешь сам. Напряжение можно рулить ШИМом. Можно обратную связь по току-моменту замутить. Обращаться с ними также как с любой индуктивностью, о чем я тоже уже писал. Не расписывал только H-мосты самодельные. Но тут тема такая, на всех не угодишь, слишком они разные бывают.
Он используется практически везде, где нужен малогабаритный моторчик
То-то все авиамодели, квадкоптеры и прочая летучая нечисть — на бесколлекторниках, кроме совсем позорного Китая за $100.
Я БУДУ ЧИТАТЬ ДО КОНЦА, ПРЕЖДЕ ЧЕМ КОММЕНТИРОВАТЬ. Я БУДУ ЧИТАТЬ ДО КОНЦА, ПРЕЖДЕ ЧЕМ КОММЕНТИРОВАТЬ. Я БУДУ ЧИТАТЬ ДО КОНЦА, ПРЕЖДЕ ЧЕМ КОММЕНТИРОВАТЬ. Я БУДУ ЧИТАТЬ ДО КОНЦА, ПРЕЖДЕ ЧЕМ КОММЕНТИРОВАТЬ. Я БУДУ ЧИТАТЬ ДО КОНЦА, ПРЕЖДЕ ЧЕМ КОММЕНТИРОВАТЬ.
Модели — не игрушки. Совсем другие требования, и другие цены.
А в дешевых игрушках, — как правило, дешевые коллекторные движки с проволочными щетками. Да и в самых дешевых моделях вертолета с соосными винтами (по сути, те же игрушки) — тоже коллекторные.
Имеется двигатель постоянного тока мощностью 60Вт, напряжение питания 48В. Как его можно переделать чтобы питать от 12В не потеряв в мощности?
Источник
Скорость вращения ротора асинхронного двигателя
Скорость вращения магнитного поля двигателя (синхронная скорость):
- n = 60f / p [об/мин]
Где:
- p – число пар полюсов двигателя;
- f – частота сети (50 Гц);
Скорость вращения двигателя онлайн калькулятор
Число пар полюсов двигателя:
Скорость вращения магнитного поля двигателя
:
Скорость вращения ротора асинхронного двигателя меньше скорости вращения магнитного поля:
n2 = n1(1 – s),
Где:
- s – скольжение.
Поделиться в соц сетях:
Популярные сообщения из этого блога
Найти тангенс фи , если известен косинус фи
Калькулятор коэффициент мощности cos fi в tg fi Как найти тангенс фи, если известен косинус фи формула: tg φ = (√(1-cos²φ))/cos φ Калькулятор онлайн – косинус в тангенс cos φ: tg φ: Поделиться в соц сетях: Найти синус φ, если известен тангенс φ Найти косинус φ, если известен тангенс φ
Индекс Руфье калькулятор
Проба Руфье калькулятор онлайн. Первые упоминания теста относиться к 1950 году. Именно в это время мы находим первое упоминание доктора Диксона о “Использование сердечного индекса Руфье в медико-спортивном контроле”. Проба Руфье – представляет собой нагрузочный комплекс, предназначенный для оценки работоспособности сердца при физической нагрузке. Индекс Руфье для школьников и студентов. У испытуемого, находящегося в положении лежа на спине в течение 5 мин, определяют число пульсаций за 15 сек (P1); После чего в течение 45 сек испытуемый выполняет 30 приседаний. После окончания нагрузки испытуемый ложится, и у него вновь подсчитывается число пульсаций за первые 15 с (Р2); И в завершении за последние 15 сек первой минуты периода восстановления (Р3); Оценку работоспособности сердца производят по формуле: Индекс Руфье = (4(P1+P2+P3)-200)/10; Индекс Руфье для спортсменов Измеряют пульс в положении сидя (Р1); Спортсмен выполняет 30 глубоких приседаний в
Найти косинус фи (cos φ), через тангенс фи (tg φ)
tg фи=… чему равен cos фи? Как перевести тангенс в косинус формула: cos(a)=(+-)1/sqrt(1+(tg(a))^2) Косинус через тангенс, перевести tg в cos, калькулятор – онлайн tg φ: cos φ: ± Поделиться в соц сетях:
