| Ускорение | |
|---|---|
 |
|
| Размерность | LT−2 |
| Единицы измерения | |
| СИ | м/с² |
| СГС | см/с² |
| Примечания | |
| векторная величина |

Падающий мяч при отсутствии сопротивления воздуха ускоряется, то есть движется все быстрее и быстрее.
Ускоре́ние (обычно обозначается латинскими буквами a (от лат. acceleratio) или w) — физическая величина, определяющая быстроту изменения скорости тела, то есть первая производная от скорости по времени. Ускорение является векторной величиной, показывающей, на сколько изменяется вектор скорости  тела при его движении за единицу времени:
тела при его движении за единицу времени:

Например, тела, свободно падающие вблизи поверхности Земли вдоль вертикали, в случаях, когда испытываемое ими сопротивление воздуха мало, увеличивают свою скорость примерно на 9,8 м/с за секунду, то есть их ускорение примерно равно 9,8 м/с². При непрямолинейном движении учитывается изменение не только величины скорости, но и её направления: скажем, ускорение тела, движущегося по окружности с постоянной по модулю скоростью, не равно нулю: имеется постоянное по модулю (и переменное по направлению) ускорение, направленное к центру окружности.
Единицей ускорения в Международной системе единиц (СИ) служит метр в секунду за секунду (русское обозначение: м/с2; международное: m/s2).
Ускорение в кинематике точки[править | править код]
Наиболее общий случай[править | править код]
Ускорение и связанные величины[править | править код]
Вектор ускорения материальной точки в любой момент времени находится путём однократного дифференцирования по времени вектора скорости материальной точки (или двукратного дифференцирования радиус-вектора):

Если на траектории точки известны координаты  и вектор скорости
и вектор скорости  в какой-либо момент времени t0, а также зависимость ускорения от времени
в какой-либо момент времени t0, а также зависимость ускорения от времени  то, интегрируя это уравнение, можно получить координаты и скорость точки в любой момент времени t (как до, так и после момента t0):
то, интегрируя это уравнение, можно получить координаты и скорость точки в любой момент времени t (как до, так и после момента t0):


Производная ускорения по времени, то есть величина, характеризующая скорость изменения ускорения, называется рывок:
 где — вектор рывка.
где — вектор рывка.


Анализ движения по кривой[править | править код]

Траекторию движения материальной точки на малом участке можно считать плоской. Вектор ускорения  можно разложить по сопутствующему базису
можно разложить по сопутствующему базису 

где
- — величина скорости,
- — единичный касательный к траектории вектор, направленный вдоль скорости (касательный орт),
- — орт главной нормали к траектории, который можно определить как единичный вектор в направлении
- — орт бинормали к траектории, перпендикулярный одновременно ортам и (то есть ортогональный к мгновенной плоскости траектории),
- — радиус кривизны траектории.







Слагаемое  называемое бинормальным ускорением, всегда равно нулю. Это можно считать прямым следствием определения векторов
называемое бинормальным ускорением, всегда равно нулю. Это можно считать прямым следствием определения векторов  можно сказать, что они выбираются именно так, чтобы первый всегда совпадал с нормальным ускорением, второй же был ортогонален первому.
можно сказать, что они выбираются именно так, чтобы первый всегда совпадал с нормальным ускорением, второй же был ортогонален первому.
Векторы  и
и  называются касательным (тангенциальным) и нормальным ускорениями соответственно.
называются касательным (тангенциальным) и нормальным ускорениями соответственно.
Итак, учитывая сказанное выше, вектор ускорения при движении по любой траектории можно записать как:

Важные частные случаи[править | править код]
Равноускоренное движение[править | править код]
Если вектор не меняется со временем, движение называют равноускоренным. При равноускоренном движении вышеприведённые общие формулы упрощаются до следующего вида:


Частным случаем равноускоренного движения является случай, когда ускорение равно нулю в течение всего времени движения. В этом случае скорость постоянна, а движение происходит по прямолинейной траектории (если скорость тоже равна нулю, то тело покоится), поэтому такое движение называют прямолинейным и равномерным.
Равноускоренное движение точки всегда является плоским, а твёрдого тела — плоскопараллельным (поступательным). Обратное, вообще говоря, неверно.
Равноускоренное движение при переходе в другую инерциальную систему отсчёта остаётся равноускоренным.
Случай равноускоренного движения, когда ускорение (постоянное) и скорость направлены по одной прямой, но в разных направлениях, называется равнозамедленным движением. Равнозамедленное движение всегда одномерно. Движение можно рассматривать как равнозамедленное лишь до того момента, пока скорость не станет равной нулю. Кроме того, всегда существуют инерциальные системы отсчёта, в которых движение не является равнозамедленным.
Прямолинейное движение[править | править код]
Важным частным случаем движения с ускорением является прямолинейное движение, когда ускорение в любой момент времени коллинеарно скорости (например, случай падения тела с вертикальной начальной скоростью). В случае прямолинейного движения можно выбрать одну из координатных осей вдоль направления движения и заменить радиус-вектор и векторы ускорения и скорости на скаляры. При этом, при постоянном ускорении из приведённых выше формул вытекает, что

Здесь v0 и v — начальная и конечная скорость тела, a — его ускорение, s — пройденный телом путь.
Ряд практически важных формул связывают затраченное время, пройденный путь, достигнутую скорость и ускорение при равноускоренном прямолинейном движении с нулевой ( ) начальной скоростью:
) начальной скоростью:


так что любые две из этих величин определяют две другие (здесь предполагается, что время отсчитывается от начала движения: t0 = 0).
Движение по окружности[править | править код]

Равномерное движение по окружности. Ускорение всегда перпендикулярно скорости и направлено к центру.
Пример неравномерного движения по окружности (математический маятник). Ускорение, складывающееся из тангенциальной и центростремительной компонент, в разные моменты изменяется от полностью касательного до полностью нормального к траектории.
Вектор ускорения

при движении точки по окружности можно разложить на два слагаемых (компоненты):

Тангенциальное или касательное ускорение  (обозначается иногда
(обозначается иногда  и т. д., в зависимости от того, какой буквой в конкретном тексте принято обозначать ускорение) направлено по касательной к траектории. Является составляющей вектора ускорения
и т. д., в зависимости от того, какой буквой в конкретном тексте принято обозначать ускорение) направлено по касательной к траектории. Является составляющей вектора ускорения  коллинеарной вектору мгновенной скорости. Характеризует изменение скорости по модулю.
коллинеарной вектору мгновенной скорости. Характеризует изменение скорости по модулю.

Центростремительное или нормальное ускорение  (также обозначается иногда
(также обозначается иногда  и т. д.) возникает (не равно нулю) всегда при движении точки не только по окружности, но и по любой траектории с ненулевой кривизной. Является составляющей вектора ускорения перпендикулярной вектору мгновенной скорости. Характеризует изменение скорости по направлению. Вектор нормального ускорения всегда направлен к мгновенной оси вращения,
и т. д.) возникает (не равно нулю) всегда при движении точки не только по окружности, но и по любой траектории с ненулевой кривизной. Является составляющей вектора ускорения перпендикулярной вектору мгновенной скорости. Характеризует изменение скорости по направлению. Вектор нормального ускорения всегда направлен к мгновенной оси вращения,

а модуль равен

где ω — угловая скорость относительно центра вращения, а r — радиус окружности.
Кроме этих двух компонент, используется также понятие угловое ускорение, показывающее, на сколько изменилась угловая скорость за единицу времени, и, аналогично линейному ускорению, вычисляемое следующим образом:

Направление вектора здесь показывает, увеличивается или уменьшается модуль скорости. Если векторы углового ускорения и угловой скорости сонаправлены (или хотя бы их скалярное произведение положительно), значение скорости растёт, и наоборот.
В частном случае равномерного движения по окружности векторы углового ускорения и тангенциального ускорения равны нулю, а центростремительное ускорение постоянно по модулю.
Ускорение при сложном движении[править | править код]
Говорят, что материальная точка (тело) совершает сложное движение, если она движется относительно какой-либо системы отсчёта, а та, в свою очередь, движется относительно другой, «лабораторной», системы отсчёта. Тогда абсолютное ускорение тела в лабораторной системе равно сумме относительного, переносного и кориолисова ускорений:
![{displaystyle {vec {a}}={vec {a}}_{r'}+{vec {a}}_{e}+2left[{vec {omega }}times {vec {v}}_{r'}right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/14c94b28221af9efd57db669ebd5baabb5db5e85)
Последний член содержит векторное произведение угловой скорости вращения движущейся системы отсчёта и скорости материальной точки в этой движущейся системе.
Ускорения в кинематике твёрдого тела[править | править код]
Связь ускорений двух точек абсолютно твёрдого тела A и B можно получить из формулы Эйлера для скоростей этих точек:
![vec{v}_B = vec{v}_A + left[vec{omega}timesvec{AB}right],](https://wikimedia.org/api/rest_v1/media/math/render/svg/674393e427cf0812f2a78e9593820b0f5f0dd0a7)
где  — вектор угловой скорости тела. Продифференцировав её по времени, получаем формулу Ривальса[1][2] (Marc-Joseph-Émilien Rivals, 1833–1889[3]):
— вектор угловой скорости тела. Продифференцировав её по времени, получаем формулу Ривальса[1][2] (Marc-Joseph-Émilien Rivals, 1833–1889[3]):
![vec{a}_B = vec{a}_A + left[vec{omega}times left[ vec{omega}times vec{AB}right] right] + left[ vec{varepsilon}times vec{AB} right],](https://wikimedia.org/api/rest_v1/media/math/render/svg/73ba130aeb13035b7b570db42daa1c2bf8bd55f0)
где  — вектор углового ускорения тела.
— вектор углового ускорения тела.
Второе слагаемое называется осестремительным ускорением, а третье — вращательным ускорением[1].
Создание ускорения. Динамика точки[править | править код]
Первый закон Ньютона постулирует существование инерциальных систем отсчёта. В этих системах отсчёта равномерное прямолинейное движение имеет место в том случае, когда тело (материальная точка) не подвергается никаким внешним воздействиям в процессе своего движения. На основе этого закона возникает ключевое для механики понятие силы как такого внешнего воздействия на тело, которое выводит его из состояния покоя или влияет на скорость его движения. Таким образом, постулируется, что причиной возникновения ненулевого ускорения в инерциальной системе отсчёта всегда является некоторое внешнее силовое воздействие[4].
Классическая механика[править | править код]
Второй закон Ньютона применительно к нерелятивистскому движению (то есть к движению со скоростями, много меньшими скорости света) утверждает, что ускорение материальной точки всегда пропорционально приложенной к ней и порождающей ускорение силе, причём коэффициент пропорциональности всегда один и тот же независимо от вида силового воздействия (он называется инертной массой материальной точки):

Если известны масса материальной точки и (как функция времени) сила, действующая на неё, то из второго закона Ньютона известно и её ускорение:  При постоянстве силы ускорение также будет постоянным. Скорость и координаты точки в любой момент времени можно получить, проинтегрировав ускорение по формулам из раздела о кинематике точки при заданных начальных скорости и координатах.
При постоянстве силы ускорение также будет постоянным. Скорость и координаты точки в любой момент времени можно получить, проинтегрировав ускорение по формулам из раздела о кинематике точки при заданных начальных скорости и координатах.
Релятивистская механика[править | править код]
В релятивистской физике второй закон Ньютона записывается в форме

что делает нахождение ускорения более сложной задачей, чем в классическом случае. В частности, длительное движение с постоянным ускорением принципиально невозможно (иначе скорость точки в конце концов превысит скорость света), а неизменность силы не означает неизменности ускорения: оно будет стремиться к нулю при нарастании скорости. Тем не менее, если зависимость  всё же найдена, расчёт
всё же найдена, расчёт  и
и  осуществим по тем же формулам, что и в нерелятивистском пределе.
осуществим по тем же формулам, что и в нерелятивистском пределе.
Ускорение в теории относительности[править | править код]
В теории относительности движение тела с переменной скоростью вдоль мировой линии в 4-мерном пространстве-времени характеризуется определённой величиной, аналогичной ускорению. В отличие от обычного (трёхмерного) вектора ускорения, 4-вектор ускорения (называемый 4-ускорением) ai является второй производной от 4-вектора координат xi не по времени, а по пространственно-временному интервалу τ (или, что то же самое, по собственному времени) вдоль мировой линии тела:

В любой точке мировой линии 4-вектор ускорения всегда ортогонален к 4-скорости:

Это означает, в частности, что 4-скорости меняются не по модулю, а лишь по направлению: независимо от направления в пространстве-времени 4-скорость любого тела равна по модулю скорости света. Геометрически, 4-ускорение совпадает с кривизной мировой линии и является аналогом нормального ускорения в классической кинематике.
В классической механике значение ускорения не изменяется при переходе от одной инерциальной системы отсчета к другой, то есть ускорение инвариантно относительно преобразований Галилея. В релятивистской механике 4-ускорение является 4-вектором, то есть при преобразованиях Лоренца изменяется аналогично пространственно-временным координатам.
“Обычный” трёхмерный вектор ускорения  (то же, что в предыдущих разделах, обозначение заменено во избежание путаницы с 4-ускорением), определяемый как производная “обычной” трёхмерной скорости по координатному времени
(то же, что в предыдущих разделах, обозначение заменено во избежание путаницы с 4-ускорением), определяемый как производная “обычной” трёхмерной скорости по координатному времени  , применяется и в рамках релятивистской кинематики, но инвариантом преобразований Лоренца не является. В мгновенно сопутствующей инерциальной системе отсчёта 4-ускорение — это
, применяется и в рамках релятивистской кинематики, но инвариантом преобразований Лоренца не является. В мгновенно сопутствующей инерциальной системе отсчёта 4-ускорение — это  При действии постоянной силы ускорение точки уменьшается с ростом скорости, однако 4-ускорение остаётся неизменным (такой случай именуют релятивистски равноускоренным движением, хотя “обычное” ускорение при этом не постоянно).
При действии постоянной силы ускорение точки уменьшается с ростом скорости, однако 4-ускорение остаётся неизменным (такой случай именуют релятивистски равноускоренным движением, хотя “обычное” ускорение при этом не постоянно).
Измерения ускорений[править | править код]
Используемые единицы[править | править код]
- метр на секунду в квадрате (метр в секунду за секунду), м/с², производная единица системы СИ;
- сантиметр на секунду в квадрате (сантиметр в секунду за секунду), см/с², производная единица системы СГС, имеет также собственное наименование гал, или галилео (применяется преимущественно в гравиметрии);
- g (произносится «же»), стандартное ускорение свободного падения на поверхности Земли, равное по определению 9,80665 м/с². В технических расчётах, не требующих точности выше 2 %, часто используется приближение g ≈ 10 м/с².
| м/с2 | фут/с2 | g | см/с2 | |
|---|---|---|---|---|
| 1 м/с² = | 1 | 3,28084 | 0,101972 | 100 |
| 1 фут/с² = | 0,304800 | 1 | 0,0310810 | 30,4800 |
| 1 g = | 9,80665 | 32,1740 | 1 | 980,665 |
| 1 см/с² = | 0,01 | 0,0328084 | 0,00101972 | 1 |
Технические средства[править | править код]
Приборы для измерения ускорения называются акселерометрами. Они не «детектируют» ускорение непосредственно, а измеряют силу реакции (укр.) (рус. опоры, возникающую при ускоренном движении. Поскольку аналогичные силы сопротивления возникают в поле тяготения, с помощью акселерометров можно измерять также гравитацию.
Акселерографы — приборы, измеряющие и автоматически записывающие (в виде графиков) значения ускорения поступательного и вращательного движения.
Значения ускорения в некоторых случаях[править | править код]
Значения ускорений различных движений:[5]
| Вид движения | Ускорение, м/с2 |
|---|---|
| Центростремительное ускорение Солнечной системы при орбитальном движении в Галактике | 2,2⋅10−10 |
| Центростремительное ускорение Земли при орбитальном движении вокруг Солнца | 0,0060 |
| Центростремительное ускорение Луны при орбитальном движении вокруг Земли | 0,0027 |
| Пассажирский лифт | 0,9—1,6 |
| Поезд метро | 1 |
| Автомобиль «Жигули» | 1,5 |
| Бегун на коротких дистанциях | 1,5 |
| Велосипедист | 1,7 |
| Конькобежец | 1,9 |
| Мотоцикл | 3—6 |
| Аварийное торможение автомобиля | 4—6 |
| Усэйн Болт, максимальное ускорение | 8[6] |
| Гоночный автомобиль | 8—9 |
| Торможение при открытии парашюта | 30 (3 g) |
| Запуск и торможение космического корабля | 40—60 (4—6 g) |
| Манёвр реактивного самолёта | до 100 (до 10 g) |
| Свая после удара копром | 300 (30 g) |
| Поршень двигателя внутреннего сгорания | 3×103 |
| Пуля в стволе винтовки | 2,5×105 |
| Микрочастицы в ускорителе | (2—50)×1014 |
| Электроны между катодом и анодом трубки цветного телевизора (20 кВ, 0,5 м) | ≈7×1015 |
| Электроны при соударении с люминофором трубки цветного телевизора (20 кВ) | ≈1022 |
| Альфа-частицы в атомном ядре | ≈1027 |
Примечание: здесь g ≈ 10 м/с2.
Понятие “обобщённое ускорение”[править | править код]
Если динамика механической системы описывается не в декартовых, а в обобщённых координатах  (например, в гамильтоновой или в лагранжевой формулировках механики), то можно ввести обобщённые ускорения
(например, в гамильтоновой или в лагранжевой формулировках механики), то можно ввести обобщённые ускорения  — первые производные по времени обобщённых скоростей
— первые производные по времени обобщённых скоростей  или вторые производные по времени обобщённых координат; например, если в качестве одной из обобщённых координат выбран угол, то обобщённым ускорением будет соответствующее угловое ускорение. Размерность обобщённых ускорений в общем случае не равна LT−2.
или вторые производные по времени обобщённых координат; например, если в качестве одной из обобщённых координат выбран угол, то обобщённым ускорением будет соответствующее угловое ускорение. Размерность обобщённых ускорений в общем случае не равна LT−2.
См. также[править | править код]
- Ускорение свободного падения
- Собственное ускорение
- Релятивистски равноускоренное движение
- Приливное ускорение
- Кориолисово ускорение
- Рывок (кинематика)
Примечания[править | править код]
- ↑ 1 2 Маркеев А. П. Теоретическая механика. — М.: ЧеРо, 1999. — С. 59. — 572 с.
- ↑ Обзор результатов Ривальса: Appendice au Mémoire de M. Bresse // Journal de l’École polytechnique. — 1853. — Т. 20. — С. 109—115. Архивировано 9 марта 2016 года.
- ↑ Joulin L. Notice biographique sur M. le commandant Rivals // Mémoires de l’Académie royale des sciences, inscriptions et belles-lettres de Toulouse. — 1891. — Т. 3, вып. 9. — С. 535—539. Архивировано 8 марта 2016 года.
- ↑ Для того, чтобы использовать уравнение движения в форме, совпадающей с формой уравнения второго закона Ньютона, применительно к ускорениям, возникающим в неинерциальных системах отсчёта даже в отсутствие каких-либо воздействий на тело, вводят фиктивные силы инерции. Например, пусть тело массой m покоится в инерциальной системе отсчёта на некотором расстоянии R от оси. Если привести систему отсчёта во вращение с угловой скоростью ω вокруг этой оси, то система становится неинерциальной, а тело будет совершать видимое вращательное движение с линейной скоростью v=ωR по окружности вокруг оси. Для его описания во вращающейся системе отсчёта необходимо ввести центростремительное ускорение, которое можно формально считать результатом действия одной из сил инерции — силы Кориолиса, равной по модулю 2mvω и направленной к оси, перпендикулярно оси и скорости тела; при этом она наполовину компенсируется действием другой силы инерции — центробежной силы, равной по модулю mvω и направленной от оси вращения.
- ↑ Кошкин Н.И., Ширкевич М.Г. Справочник по элементарной физике. — 10-е, испр. и доп.. — М.: Наука, 1988. — С. 61. — 256 с. — ISBN 5-02-013833-9.
- ↑ График зависимости ускорения У. Болта от времени Архивная копия от 10 мая 2013 на Wayback Machine — забег на 100 м на летних Олимпийских играх 2008 года в Пекине
Ссылки[править | править код]
- Ландау Л. Д., Лифшиц Е. М. Механика. — Издание 5-е, стереотипное. — М.: Физматлит, 2004. — 224 с. — («Теоретическая физика», том I). — ISBN 5-9221-0055-6.
- David C. Cassidy, Gerald James Holton, and F. James Rutherford. Understanding physics. — Birkhäuser (англ.) (рус., 2002. — ISBN 978-0-387-98756-9.
- Pauli W. Theory of Relativity. — Dover, 1981. — ISBN 978-0-486-64152-2.
В прошлой статье мы немножко разобрались с тем, что такое механика и зачем она нужна. Мы уже знаем, что такое система отсчета, относительность движения и материальная точка. Что ж, пора двигаться дальше! Здесь мы рассмотрим основные понятия кинематики, соберем вместе самые полезные формулы по основам кинематики и приведем практический пример решения задачи.
Присоединяйтесь к нам в телеграм и получайте ежедневную рассылку с полезной информацией по актуальным студенческим вопросам.
Траектория, радиус-вектор, закон движения тела
Кинематикой занимался еще Аристотель. Правда, тогда это не называлось кинематикой. Затем очень большой вклад в развитие механики, и кинематики в частности, внес Галилео Галилей, изучавший свободное падение и инерцию тел.
Итак, кинематика решает вопрос: как тело движется. Причины, по которым оно пришло в движение, ее не интересуют. Кинематике не важно, сама поехала машина, или ее толкнул гигантский динозавр. Абсолютно все равно.
Сейчас мы будем рассматривать самую простую кинематику – кинематику точки. Представим, что тело (материальная точка) движется. Не важно, что это за тело, все равно мы рассматриваем его, как материальную точку. Может быть, это НЛО в небе, а может быть, бумажный самолетик, который мы запустили из окна. А еще лучше, пусть это будет новая машина, на которой мы едем в путешествие. Перемещаясь из точки А в точку Б, наша точка описывает воображаемую линию, которая называется траекторией движения. Другое определение траектории – годограф радиус вектора, то есть линия, которую описывает конец радиус-вектора материальной точки при движении.
Радиус-вектор – вектор, задающий положение точки в пространстве.
Для того, чтобы узнать положение тела в пространстве в любой момент времени, нужно знать закон движения тела – зависимость координат (или радиус-вектора точки) от времени.
Перемещение и путь
Тело переместилось из точки А в точку Б. При этом перемещение тела – отрезок, соединяющий данные точки напрямую – векторная величина. Путь, пройденный телом – длина его траектории. Очевидно, перемещение и путь не стоит путать. Модуль вектора перемещения и длина пути совпадают лишь в случае прямолинейного движения.

В системе СИ перемещение и длина пути измеряются в метрах.
Перемещение равно разнице радиус-векторов в начальный и конечный моменты времени. Другими словами, это приращение радиус вектора.
Скорость и ускорение
Средняя скорость – векторная физическая величина, равная отношению вектора перемещения к промежутку времени, за которое оно произошло
А теперь представим, что промежуток времени уменьшается, уменьшается, и становится совсем коротким, стремится к нулю. В таком случае о средней скорости говорить на приходится, скорость становится мгновенной. Те, кто помнит основы математического анализа, тут же поймут, что в дальнейшем нам не обойтись без производной.
Мгновенная скорость – векторная физическая величина, равная производной от радиус вектора по времени. Мгновенная скорость всегда направлена по касательной к траектории.
В системе СИ скорость измеряется в метрах в секунду
Если тело движется не равномерно и прямолинейно, то у него есть не только скорость, но и ускорение.
Ускорение (или мгновенное ускорение) – векторная физическая величина, вторая производная от радиус-вектора по времени, и, соответственно, первая производная от мгновенной скорости
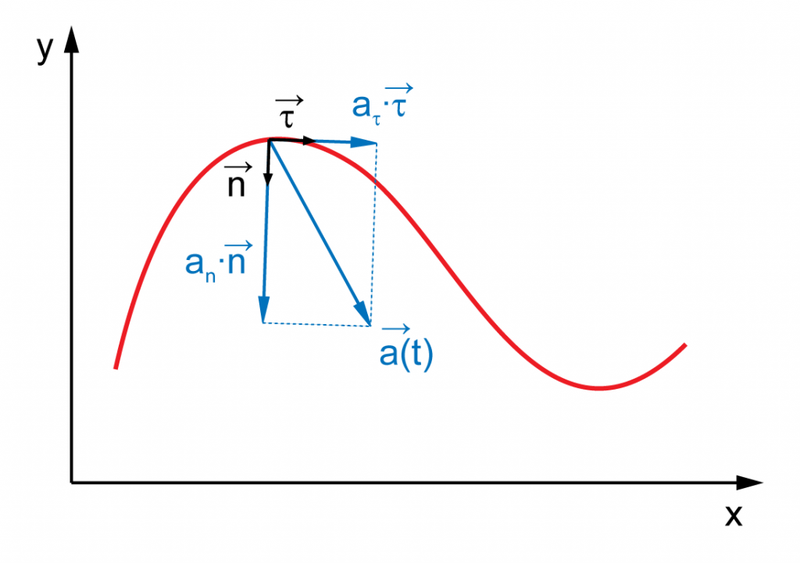
Ускорение показывает, как быстро изменяется скорость тела. В случае прямолинейного движения, направления векторов скорости и ускорения совпадают. В случае же криволинейного движения, вектор ускорения можно разложить на две составляющие: ускорение тангенциальное, и ускорение нормальное.
Тангенциальное ускорение показывает, как быстро изменяется скорость тела по модулю и направлено по касательной к траектории
Нормальное же ускорение характеризует быстроту изменения скорости по направлению. Векторы нормального и тангенциального ускорения взаимно перпендикулярны, а вектор нормального ускорения направлен к центру окружности, по которой движется точка.
Здесь R – радиус окружности, по которой движется тело.
Закон равноускоренного движения
Рассмотрим далее закон равноускоренного движения, то есть движения с постоянным ускорением. Будем рассматривать простейший случай, когда тело движется вдоль оси x.
Здесь – x нулевое- начальная координата. v нулевое – начальная скорость. Продифференцируем по времени, и получим скорость
Производная по скорости от времени даст значение ускорения a, которое является константой.
Пример решения задачи
Теперь, когда мы рассмотрели физические основы кинематики, пора закрепить знания на практике и решить какую-нибудь задачу. Причем, чем быстрее, тем лучше.
Кстати! Для всех наших читателей сейчас действует скидка 10% на любой вид работы.
Решим такую задачу: точка движется по окружности радиусом 4 метра. Закон ее движения выражается уравнением S=A+Bt^2. А=8м, В=-2м/с^2. В какой момент времени нормальное ускорение точки равно 9 м/с^2? Найти скорость, тангенциальное и полное ускорение точки для этого момента времени.
Решение: мы знаем, что для того, чтобы найти скорость нужно взять первую производную по времени от закона движения, а нормальное ускорение равняется частному квадрата скорости и радиуса окружности, по которой точка движется. Вооружившись этими знаниями, найдем искомые величины.

Нужна помощь в решении задач? Профессиональный студенческий сервис готов оказать ее.
- Равноускоренное прямолинейное движение — движение по прямой линии с постоянным ускорением (a=const).
- Ускорение — векторная физическая величина, показывающая изменение скорости тела за 1 с. Обозначается как a.
- Единица измерения ускорения — метр в секунду в квадрате (м/с2).
- Акселерометр — прибор для измерения ускорения.
Формула ускорения
Ускорение тела равно отношению изменения вектора скорости ко времени, в течение которого это изменение произошло:
v — скорость тела в данный момент времени, v0 — скорость тела в начальный момент времени, t — время, в течение которого изменялась скорость
Пример №1. Состав тронулся с места и через 20 секунд достиг скорости 36 км/ч. Найти ускорение его разгона.
Сначала согласуем единицы измерения. Для этого переведем скорость в м/с: умножим километры на 1000 и поделим на 3600 (столько секунд содержится в 1 часе). Получим 10 м/с.
Начальная скорость состава равно 0 м/с, так как изначально он стоял на месте. Имея все данные, можем подставить их в формулу и найти ускорение:
Проекция ускорения
Проекция ускорения на ось ОХ
vx — проекция скорости тела в данный момент времени, v0x — проекция скорости в начальный момент времени, t — время, в течение которого изменялась скорость
Знак проекции ускорения зависит от того, в какую сторону направлен вектор ускорения относительно оси ОХ:
- Если вектор ускорения направлен в сторону оси ОХ, то его проекция положительна.
- Если вектор ускорения направлен в сторону, противоположную направлению оси ОХ, его проекция отрицательная.
При решении задач на тему равноускоренного прямолинейного движения проекции величин можно записывать без нижнего индекса, так как при движении по прямой тело изменяет положение относительно только одной оси (ОХ). Их обязательно нужно записывать, когда движение описывается относительно двух и более осей.
Направление вектора ускорения
Направление вектора ускорения не всегда совпадает с направлением вектора скорости!
Равноускоренным движением называют такое движение, при котором скорость за одинаковые промежутки времени изменяется на одну и ту же величину. При этом направления векторов скорости и ускорения тела совпадают (а↑↑v).
Равнозамедленное движение — частный случай равноускоренного движения, при котором скорость за одинаковые промежутки времени уменьшается на одну и ту же величину. При этом направления векторов скорости и ускорения тела противоположны друг другу (а↑↓v).
Пример №2. Автомобиль сначала разогнался, а затем затормозил. Во время разгона направления векторов его скорости и ускорения совпадают, так как скорость увеличивается. Но при торможении скорость уменьшается, потому что вектор ускорения изменил свое направление в противоположную сторону.

График ускорения
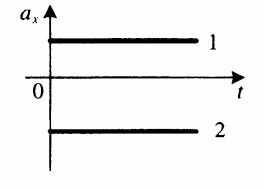
График ускорения — график зависимости проекции ускорения от времени. Проекция ускорения при равноускоренном прямолинейном движении не изменяется (ax=const). Графиком ускорения при равноускоренном прямолинейном движении является прямая линия, параллельная оси времени.
Зависимость положения графика проекции ускорения относительно оси ОХ от направления вектора ускорения:
- Если график лежит выше оси времени, движение равноускоренное (направление вектора ускорения совпадает с направлением оси ОХ). На рисунке выше тело 1 движется равноускорено.
- Если график лежит ниже оси времени, движение равнозамедленное (вектор ускорения направлен противоположно оси ОХ). На рисунке выше тело 2 движется равнозамедлено.
Если график ускорения лежит на оси времени, движение равномерное, так как ускорение равно 0. Скорость в этом случае — величина постоянная.
Чтобы сравнить модули ускорений по графикам, нужно сравнить степень их удаленности от оси времени независимо от того, лежат они выше или ниже нее. Чем дальше от оси находится график, тем больше его модуль. На рисунке график 2 находится дальше от оси времени по сравнению с графиком один. Поэтому модуль ускорения тела 2 больше модуля ускорения тела 1.
Пример №3. По графику проекции ускорения найти участок, на котором тело двигалось равноускорено. Определить ускорение в момент времени t1 = 1 и t2 = 3 с.
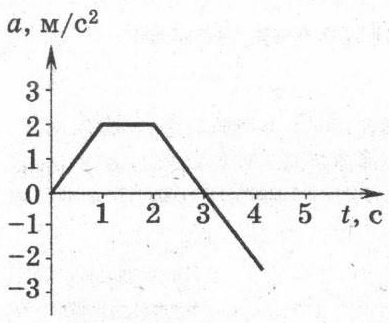
В промежуток времени от 0 до 1 секунды график ускорения рос, с 1 до 2 секунд — не менялся, а с 2 до 4 секунд — опускался. Так как при равноускоренном движении ускорение должно оставаться постоянным, ему соответствует второй участок (с 1 по 2 секунду).
Чтобы найти ускорение в момент времени t, нужно мысленно провести перпендикулярную прямую через точку, соответствующую времени t. От точки пересечения с графиком нужно мысленно провести перпендикуляр к оси проекции ускорения. Значение точки, в которой пересечется перпендикуляр с этой осью, покажет ускорение в момент времени t.
В момент времени t1 = 1с ускорение a = 2 м/с2. В момент времени t2 = 3 ускорение a = 0 м/с2.
Задание EF18774
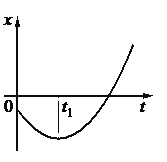
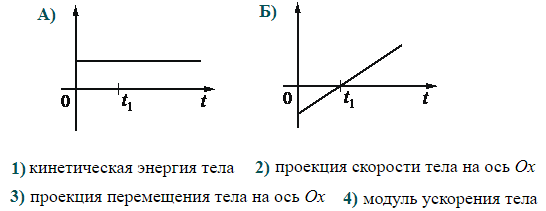
На рисунке показан график зависимости координаты x тела, движущегося вдоль оси Ох, от времени t (парабола). Графики А и Б представляют собой зависимости физических величин, характеризующих движение этого тела, от времени t. Установите соответствие между графиками и физическими величинами, зависимости которых от времени эти графики могут представлять.
К каждой позиции графика подберите соответствующую позицию утверждения и запишите в поле цифры в порядке АБ.
Алгоритм решения
- Определить, какому типу движения соответствует график зависимости координаты тела от времени.
- Определить величины, которые характеризуют такое движение.
- Определить характер изменения величин, характеризующих это движение.
- Установить соответствие между графиками А и Б и величинами, характеризующими движение.
Решение
График зависимости координаты тела от времени имеет вид параболы в случае, когда это тело движется равноускоренно. Так как движение тела описывается относительно оси Ох, траекторией является прямая. Равноускоренное прямолинейное движение характеризуется следующими величинами:
- перемещение и путь;
- скорость;
- ускорение.
Перемещение и путь при равноускоренном прямолинейном движении изменяются так же, как координата тела. Поэтому графики их зависимости от времени тоже имеют вид параболы.
График зависимости скорости от времени при равноускоренном прямолинейном движении имеет вид прямой, которая не может быть параллельной оси времени.
График зависимости ускорения от времени при таком движении имеет вид прямой, перпендикулярной оси ускорения и параллельной оси времени, так как ускорение в этом случае — величина постоянная.
Исходя из этого, ответ «3» можно исключить. Остается проверить ответ «1». Кинетическая энергия равна половине произведения массы тела на квадрат его скорости. Графиком квадратичной функции является парабола. Поэтому ответ «1» тоже не подходит.
График А — прямая линия, параллельная оси времени. Мы установили, что такому графику может соответствовать график зависимости ускорения от времени (или его модуля). Поэтому первая цифра ответа — «4».
График Б — прямая линия, не параллельная оси времени. Мы установили, что такому графику может соответствовать график зависимости скорости от времени (или ее проекции). Поэтому вторая цифра ответа — «2».
Ответ: 24
pазбирался: Алиса Никитина | обсудить разбор
Задание EF17992
Начальная скорость автомобиля, движущегося прямолинейно и равноускоренно, равна 5 м/с. После прохождения расстояния 40 м его скорость оказалась равной 15 м/c. Чему равно ускорение автомобиля?
Алгоритм решения
- Записать исходные данные.
- Записать формулу, связывающую известные из условия задачи величины.
- Выразить из формулы искомую величину.
- Вычислить искомую величину, подставив в формулу исходные данные.
Решение
Запишем исходные данные:
- Начальная скорость v0 = 5 м/с.
- Конечная скорость v = 15 м/с.
- Пройденный путь s = 40 м.
Формула, которая связывает ускорение тела с пройденным путем:
Так как скорость растет, ускорение положительное, поэтому перед ним в формуле поставим знак «+».
Выразим из формулы ускорение:
Подставим известные данные и вычислим ускорение автомобиля:
Ответ: 2,5
pазбирался: Алиса Никитина | обсудить разбор
Задание EF18202
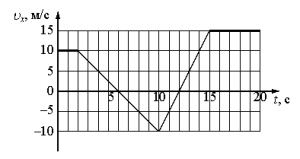
Внимательно прочитайте текст задания и выберите верный ответ из списка. На рисунке приведён график зависимости проекции скорости тела vx от времени.
Какой из указанных ниже графиков совпадает с графиком зависимости от времени проекции ускорения этого тела ax в интервале времени от 6 с до 10 с?

Алгоритм решения
- Охарактеризовать движение тела на участке графика, обозначенном в условии задачи.
- Вычислить ускорение движение тела на этом участке.
- Выбрать график, который соответствует графику зависимости от времени проекции ускорения тела.
Решение
Согласно графику проекции скорости в интервале времени от 6 с до 10 с тело двигалось равнозамедленно. Это значит, что проекция ускорения на ось ОХ отрицательная. Поэтому ее график должен лежать ниже оси времени, и варианты «а» и «в» заведомо неверны.
Чтобы выбрать между вариантами «б» и «г», нужно вычислить ускорение тела. Для этого возьмем координаты начальной и конечной точек рассматриваемого участка:
- t1 = 6 с. Этой точке соответствует скорость v1 = 0 м/с.
- t2 = 10 с. Этой точке соответствует скорость v2 = –10 м/с.
Используем для вычислений следующую формулу:
Подставим в нее известные данные и сделаем вычисления:
Этому значению соответствует график «г».
Ответ: г
pазбирался: Алиса Никитина | обсудить разбор
Задание EF18027
На графике приведена зависимость проекции скорости тела от времени при прямолинейном движении по оси х. Определите модуль ускорения тела.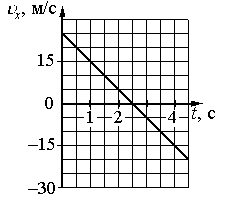
Алгоритм решения
- Записать формулу ускорения.
- Записать формулу для вычисления модуля ускорения.
- Выбрать любые 2 точки графика.
- Определить для этих точек значения времени и проекции скорости (получить исходные данные).
- Подставить данные формулу и вычислить ускорение.
Решение
Записываем формулу ускорения:
По условию задачи нужно найти модуль ускорения, поэтому формула примет следующий вид:
Выбираем любые 2 точки графика. Пусть это будут:
- t1 = 1 с. Этой точке соответствует скорость v1 = 15 м/с.
- t2 = 2 с. Этой точке соответствует скорость v2 = 5 м/с.
Подставляем данные формулу и вычисляем модуль ускорения:
Ответ: 10
pазбирался: Алиса Никитина | обсудить разбор
Алиса Никитина | Просмотров: 13.7k
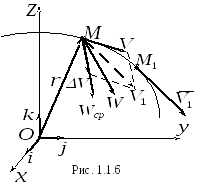 Ускорение точкихарактеризует
Ускорение точкихарактеризует
быстроту изменения её вектора скорости.
Пусть точка![]() ,
,
движущаяся относительно неподвижной
системы отсчета, в момент времени![]() занимает положение
занимает положение![]() ,
,
а в момент![]() – положение
– положение![]() ;
;
скорости точки в этих положениях
представлены векторами![]() и
и![]() (рис. 1.1.6). Перенесем начало вектора
(рис. 1.1.6). Перенесем начало вектора![]() в точку
в точку![]() и построим параллелограмм, в котором
и построим параллелограмм, в котором
диагональю будет![]() ,
,
а одной из сторон – вектор![]() .
.
Другая сторона будет изображать вектор![]() ,
,
т. е. приращение вектора
![]() за время
за время![]() .
.
Векторная величина![]() называется средним ускорением точки
называется средним ускорением точки
за время![]() ,
,
вектор![]() направлен так же, как и вектор
направлен так же, как и вектор![]() .
.
Ускорением точки в данный момент времени
называется вектор
![]() ,
,
равный пределу, к которому стремится![]() при
при![]() .
.
![]() .
.
(1.1.19)
Учитывая формулу (1.1.8), можно записать
![]() .
.
(1.1.20)
Ускорение точки в данный момент
времени равно первой производной по
времени от вектора скорости точки или
второй производной по времени от
радиус-вектора точки.
Ускорение точки при
координатном способе задания движения
Пусть движение точки задается уравнениями
(1.1.2). Формулу (1.1.20) с учетом зависимости
(1.1.11) можно представить в следующем
виде: ![]() ,
,
(1.1.21)
где
![]() – (1.1.22)
– (1.1.22)
проекции ускорения точки на неподвижные
оси декартовых координат.
Следовательно, проекции ускорения
точки на неподвижные оси декартовых
координат равны первым производным по
времени от соответствующих проекций
скоростей или вторым производным по
времени от соответствующих координат.
Модуль ускорения точки равен
![]() ,
,
(1.1.23)
а направление вектора
![]() точки определяется направляющими
точки определяется направляющими
косинусами:![]()
![]() .
.
(1.1.24)
1.1.4. Ускорение точки при естественном способе задания движения
При естественном способе задания
движения с точкой М связывают
сис-тему отсчёта, представляющую собой
оси![]() естественного трёхгранника
естественного трёхгранника![]() (рис.
(рис.
1.1.7).П – соприкасающаяся плоскость
к кривой в точкеМ . Плоскость
N, проведенная через точку![]() перпендикулярно касательной в этой
перпендикулярно касательной в этой
точке называетсянормальной
плоскостью. Любая прямая, проходящая
через точку![]() и
и
лежащая в этой плоскости является
нормалью кривой в точке![]() .
.
Нормаль![]() ,
,
расположенная в соприкасающейся
плоскости, называетсяглав-ной
нормалью. Положительное направление
главной нормали определяется ортом
главной нормали![]() ,
,
направленным в сторону вогнутости
кривой. Нормаль![]() ,
,
перпендикулярная соприкасающейся
плоскости, называетсябинормальюк кривой в точкеМ. Положительное
направление бинормали определяется ее
ортом![]() ,
,
причем![]() ,
,
т.е. орты![]() ориентированы друг относительно друга
ориентированы друг относительно друга
так же, как орты![]() правой прямоугольной декартовой системы
правой прямоугольной декартовой системы
координат. Плоскость![]() ,
,
проходящая через касательную и бинормаль,
называетсяспрямляющей.
Т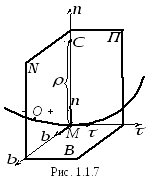 ри
ри
взаимно перпендикулярные оси: касательная![]() ,
,
главная нормаль![]() и бинормаль
и бинормаль![]() образуютестественные осикривойв данной точке. Перемещаясь
образуютестественные осикривойв данной точке. Перемещаясь
по кривой вместе с точкой![]() ,
,
естественные оси, оставаясь ортогональными,
изменяют свою ориентацию в пространстве
относительно неподвижной системы
отсчета.
Разложим вектор
![]() ускорения точки на естественные оси.
ускорения точки на естественные оси.
Дифференцируя выражение (1.1.17) скорости
точки по времени, получаем
![]()
![]() .
.
(1.1.25)
Здесь первое слагаемое – составляющая
вектора ускорения по касатель-ной к
траектории –
![]() .
.
Второй множитель во втором слагаемом
пред-ставим в виде![]() ,
,
где модуль![]() –
–
кривизна кривой в данной точкеМ.
Вектор![]() перпендикулярен орту
перпендикулярен орту![]() и
и
расположен в соприка-сающейся плоскости,
его направление совпадает с направлением
орта![]() глав-ной нормали.
глав-ной нормали.
Радиусом кривизны кривой в данной
точке
![]() называется величина
называется величина
![]() .
.
Следовательно, второе слагаемое в
формуле (1.1.25) примет вид ![]() и представляет собою составляющую
и представляет собою составляющую
ускорения точки по главной нормали.
Таким образом, ускорение точки при
естественном способе задания её движения
раскладывается на две составляющие: –
ускорение
![]() ,
,
направленное по касательной к траектории
и называемоекасательнымилитангенциаль-ными
ускорение![]() ,
,
направленное по главной нормали к
центру кривизны траектории и называемоенормальнымили
центростремительным;
![]() ,
,![]() .
.
В итоге, формулу (1.1.25) можно представить
в виде
![]() .
.
(1.1.26)
Скалярные множители в (1.1.25) являются
проекциями ускорения точки на касательную
и главную нормаль:
![]() ,
,
(1.1.27)
![]() .
.
(1.1.28)
Модуль касательного ускорения равен
![]() .
.
(1.1.29)
Из зависимости (1.1.25) видно, что вектор
ускорения точки
![]() лежит в соприкасающейся плоскости и на
лежит в соприкасающейся плоскости и на
бинормаль не проецируется, поэтому![]() .
.
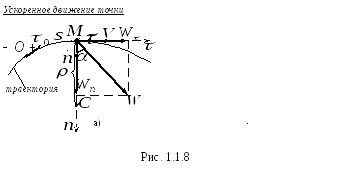
Касательное ускорение
![]() характеризует быстроту изменения
характеризует быстроту изменения
вектораскорости
![]() по модулюи направлено
по модулюи направлено
в сторону скорости при ускоренном
движении точки (рис. 1.1.8,а) и в противоположную
сторону – при её замедленном движении
(рис. 1.1.8,б).
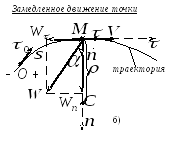
Нормальное ускорение
![]() характеризует быстроту изменения
характеризует быстроту изменения
вектораскорости
![]() по направлениюи
по направлениюи
направлено всегда в сторону вогнутости
траектории. При![]() движение точки будет равномерным; при
движение точки будет равномерным; при![]() точка движется прямолинейно.
точка движется прямолинейно.
Поскольку векторы
![]() и
и![]() взаимно перпендикулярны, то модуль
взаимно перпендикулярны, то модуль
ускорения равен:
![]() .
.
(1.1.30)
Вопросы для самопроверки
по теме 1.1
1. Что является предметом теоретической
механики?
2. Что называется механическим движением
материальных тел?
3. В чем состоит метод абстракции
в механике?
4. Какими способами задается движение
точки?
5. Установите связь между векторным и
координатным способами задания движения
точки.
6. Как определяют траекторию движения
точки, если заданы её уравне-ния движения
в проекциях на декартовые оси?
7. Дайте определение скорости точки
при векторном и координатном способах
задания движения.
8. Дайте определение скорости точки
при естественном способе задания её
движения.
9. Дайте определение ускорения точки
при задании её движения векторным и
координатным способами.
10. Перечислите естественные оси, их
орты и названия координатных плоскостей.
11. Чем орты естественных осей отличаются
от ортов осей неподвижной декартовой
системы отсчета?
12. Что характеризует касательное
ускорение?
13. Что характеризует нормальное
ускорение?
14. Как движется точка при
![]() ?
?
15. Как движется точка при
![]() ?
?
16. Какое движение точки называется
равноускоренным, равнозамедлен-ным?
17. Назовите кривые, имеющие постоянный
радиус кривизны.
18. Решите самостоятельно задачи
12.4(12.5), 12.9(12.10), 12.14(12.15), 12.22(12.23), 12.25(12.26) из
[3].
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
В очередной раз меня попросили решить пару задачек по физике, и я вдруг обнаружил, что не могу решить их с ходу. Немного погуглив, я обнаружил, что сайты в топе выдачи содержат сканы одного и того же учебника и не описывают конкретных примеров решений задачи о том, как найти вектор скорости и ускорения материальной точки. По-этому я решил поделиться с миром примером своего решения.
Траектория движения материальной точки через радиус-вектор
Подзабыв этот раздел математики, в моей памяти уравнения движения материальной точки всегда представлялись при помощи знакомой всем нам зависимости y(x) , и взглянув на текст задачи, я немного опешил когда увидел векторы. Оказалось, что существует представление траектории материальной точки при помощи радиус-вектора – вектора, задающего положение точки в пространстве относительно некоторой заранее фиксированной точки, называемой началом координат.

Формула траектория движения материальной точки помимо радиус-вектора описывается так же ортами – единичными векторами i, j , k в нашем случае совпадающими с осями системы координат. И, наконец, рассмотрим пример уравнения траектории материальной точки (в двумерном пространстве):

Что интересного в данном примере? Траектория движения точки задается синусами и косинусами, как вы думаете, как будет выглядеть график в всем нам знакомом представлении y(x) ? “Наверное какой-то жуткий”, подумали вы, но все не так сложно как кажется! Попробуем построить траекторию движения материальной точки y(x), если она движется по представленному выше закону:

Здесь я заметил квадрат косинуса, если вы в каком-нибудь примере видите квадрат синуса или косинуса, это значит что нужно применять основное тригонометрическое тождество, что я и сделал (вторая формула) и преобразовал формулу координаты y, чтобы вместо синуса подставить в нее формулу изменения x:

В итоге жуткий закон движения точки оказался обычной параболой, ветви которой направлены вниз. Надеюсь, вы поняли примерный алгоритм построения зависимости y(x) из представления движения через радиус-вектор. Теперь перейдем к нашему главному вопросу: как же найти вектор скорости и ускорения материальной точки, а так же их модули.
Вектор скорости материальной точки

Всем известно, что скорость материальной точки – это величина пройденного пути точкой за единицу времени, то есть производная от формулы закона движения. Чтобы найти вектор скорости нужно взять производную по времени. Давайте рассмотрим конкретный пример нахождения вектора скорости.
Пример нахождения вектора скорости
Имеем закон перемещения материальной точки:

Теперь нужно взять производную от этого многочлена, если вы забыли как это делается, то вот вам таблица производных различных функций. В итоге вектор скорости будет иметь следующий вид:

Все оказалось проще, чем вы думали, теперь найдем вектор ускорения материальной точки по тому же самому закону, представленному выше.
Как найти вектор ускорения материальной точки

Вектор ускорения точки это векторная величина, характеризующая изменение с течением времени модуля и направления скорости точки. Чтобы найти вектор ускорения материальной точки в нашем примере, нужно взять производную, но уже от формулы вектора скорости, представленной чуть выше:

Модуль вектора скорости точки
Теперь найдем модуль вектора скорости материальной точки. Как вы знаете из 9-го класса, модуль вектора – это его длина, в прямоугольных декартовых координатах равна квадратному корню из суммы квадратов его координат. И откуда же из полученного нами выше вектора скорости взять его координаты спросите вы? Все очень просто:

Теперь достаточно только подставить время, указанное в задаче и получить конкретное числовое значение.
Модуль вектора ускорения
Как вы поняли из написанного выше (и из 9-го класса), нахождение модуля вектора ускорения происходит тем же образом, что и модуля вектора скорости: извлекаем корень квадратный из суммы квадратов координат вектора, все просто! Ну и вот вам, конечно же, пример:

Как вы видите, ускорение материальной точки по заданному выше закону не зависит от времени и имеет постоянную величину и направление.
Еще примеры решений задачи нахождения вектора скорости и ускорения
А вот тут вы можете найти примеры решения и других задач по физике на тему “механика твердых тел”. А для тех, кто не совсем понял как найти вектор скорости и ускорения, вот вам еще парочка примеров из сети без всяких лишних объяснений, надеюсь, они вам помогут.

Если у вас возникли какие-нибудь вопросы, вы можете задать их в комментариях.
