и механической
системы
Количество
движения материальной точки – это
векторная мера механического движения,
равная произведению массы точки на ее
скорость,
![]() .
.
Единица измерения количества движения
в системе СИ –![]() .
.
Количество движения механической
системы равно сумме количеств движений
всех материальных точек, образующих
систему:
![]() .
.
(5.2)
Преобразуем
полученную формулу
![]() .
.
Согласно формуле (4.2)
![]() ,
,
поэтому
![]() .
.
Таким образом, количество движения
механической системы равно произведению
ее массы на скорость центра масс:
![]() .
.
(5.3)
Поскольку количество движения системы
определяется движением только одной
ее точки (центра масс), оно не может быть
полной характеристикой движения системы.
Действительно, при любом движении
системы, когда ее центр масс остается
неподвижным, количество движения системы
равно нулю. Например, это имеет место
при вращении твердого тела вокруг
неподвижной оси, проходящей через его
центр масс.
 Введем
Введем
систему отсчетаCxyz,
имеющую начало в центре масс механической
системыСи движущуюся поступательно
относительно инерциальной системы![]() (рис. 5.1). Тогда движение каждой точки
(рис. 5.1). Тогда движение каждой точки![]() можно рассматривать как сложное:
можно рассматривать как сложное:
переносное движение вместе с осямиCxyzи движение относительно этих осей. В
силу поступательности движения осейCxyzпереносная скорость
каждой точки равна скорости центра масс
системы, и количество движения системы,
определяемое по формуле (5.3) , характеризует
только ее поступательное переносное
движение.
5.3. Импульс силы
Для
характеристики действия силы за некоторый
промежуток времени используют величину,
называемую импульсом силы.
Элементарный импульс силы – это векторная
мера действия силы, равная произведению
силы на элементарный промежуток времени
ее действия:
![]() .
.
(5.4)
Единица
измерения импульса силы в системе СИ
равна
![]() ,
,
т.е. размерности импульса силы и количества
движения одинаковы.
Импульс силы
за конечный промежуток времени
![]() равен определенному интегралу от
равен определенному интегралу от
элементарного импульса:
![]() .
.
(5.5)
Импульс
постоянной силы равен произведению
силы на время ее действия:
![]() .
.
(5.6)
В общем случае
импульс силы может быть определен по
его проекциям на координатные оси:
![]() .
.
(5.7)
5.4. Теорема об изменении количества движения
материальной
точки
В основном
уравнении динамики (1.2) масса материальной
точки – величина постоянная, ее ускорение
![]() ,
,
что дает возможность записать это
уравнение в виде:
![]() .
.
(5.8)
Полученное
соотношение позволяет сформулировать
теорему об изменении количества
движения материальной точки в
дифференциальной форме:Производная
по времени от количества движения
материальной точки равна геометрической
сумме (главному вектору) действующих
на точку сил.
Теперь получим
интегральную форму этой теоремы. Из
соотношения (5.8) следует, что
![]() .
.
Проинтегрируем
обе части равенства в пределах,
соответствующих моментам времени
![]() и
и![]() ,
,
![]() .
.
(5.9)
Интегралы в
правой части представляют собой импульсы
сил, действующих на точку, поэтому после
интегрирования левой части получим
![]() .
.
(5.10)
Таким образом,
доказана теорема об изменении
количества движения материальной точкив интегральной форме:Изменение
количества движения материальной точки
за некоторый промежуток времени равно
геометрической сумме импульсов
действующих на точку сил за тот же
промежуток времени.
Векторному
уравнению (5.10) соответствует система
трех уравнений в проекциях на координатные
оси:
![]() ;
;
![]() ;
;
(5.11)
![]() .
.
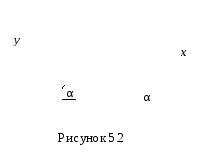
Пример 1.Тело движется
поступательно по наклонной плоскости,
образующей угол α с горизонтом. В
начальный момент времени оно имело
скорость![]() ,
,
направленную вверх по наклонной плоскости
(рис. 5.2).
Через какое
время скорость тела станет равной нулю,
если коэффициент трения равен f
?
Примем
поступательно движущееся тело за
материальную точку и рассмотрим
действующие на него силы. Это сила
тяжести
![]() ,
,
нормальная реакция плоскости![]() и сила трения
и сила трения![]() .
.
Направим осьxвдоль
наклонной плоскости вверх и запишем
1-е уравнение системы (5.11)
![]() ,
,
(5.12)
где проекции
количеств движения
![]() ,
,
а проекции импульсов постоянных сил![]() ,
,![]() и
и![]() равны произведениям проекций сил на
равны произведениям проекций сил на
время движения:
![]() .
.
 Так
Так
как ускорение тела направлено вдоль
наклонной плоскости, сумма проекций на
осьyвсех действующих
на тело сил равна нулю:![]() ,
,
откуда следует, что![]() .
.
Найдем силу трения
![]()
и из уравнения
(5.12) получим
![]() ,
,
откуда
определим время движения тела
![]() .
.
Содержание:
Количество движения материальной точки и системы импульс силы:
Количеством движения называют меру механического движения, выражающуюся геометрической суммой произведений массы каждой частицы материальной системы на ее скорость.
Количество движения точки и системы. Ньютон во введении к «Началам» дал такое определение «Количество движения есть мера такового, устанавливаемая пропорционально скорости и массе»
Всякая материальная частица обладает двумя мерами механического движения, о чем уже было сказано в § 37 Одна из этих мер, называемая количеством движения, имеет применение всякий раз, когда
механическое движение от одного тела переходит другому в виде механического же движения Так, например, один биллиардный шар, ударивши другой, передает ему часть своего механического движения, выражаемого количеством движения
Количество движения материальной частицы обладающей массой m и скоростью
(156)
Размерность количества движения в физической системе единиц
[K]ф = L1W1T-1,
например м кг/сек Эта величина принята за единицу количества движения в СИ
В технической системе единиц размерность количества движения
[К]T = L0F1T1,
например кГ сек, если в технической системе сила выражена в килограммах, а время — в секундах
Наряду с вектором количества движения в механике применяют проекции количества движения на оси
Kx = mυ cos αυ = mυx, Ky = mυ cos βυ = mυy,
Kz = mυ co∙, γτ = mυz (157)
Направляющие косинусы количества движения равны направляю щим косинусам (62) скорости, так как вектор количества движения материальной точки ичи частицы направлен по скорости.
(62//)
Модуль количества движения легко подсчитать по формуле
(158)
Проекция количества движения на ось (как и проекция на ось всякого вектора)—скаляр 2-го рода и определяется величиной и знаком
Если мы умножим проекцию количества движения на единичный вектор этой оси, то получим составляющую, или компоненту, количества движения по оси Вектор количества движения точки (или материальной частицы) связан со своими компонентами по координатным осям обычным соотношением
Количество движения материальной системы выражается суммой количеств движения всех частиц этой системы «Количество движения целого есть сумма количеств движения отдельных частей его» (Ньютон) Таким образом, для материальной системы, содержащей n частиц или n точек,
(159)
где суммирование распространено на все частицы материальной системы
Под проекцией количества движения системы на какую-либо ось понимают алгебраическую сумму проекции количеств движения всех точек системы на эту ось
(159/)
Точку, определяемую координатами, равными отношению статического момента тела или системы относительно соответствующей оси к ею массе, называют центром масс
Центр масс
Ознакомимся с очень важным в динамике понятием, частично известным нам из курса статики твердого тела (см гл VII) Напомним, что центр тяжести твердого тела — это центр параллельных сил, представляющих веса материальных частиц твердого тела Для определения координат центра тяжести мы вывели формулы
(45)
где в числителе — статический момент веса относительно соответствующей оси, а в знаменателе — вес всего тела или в векторной форме
(45/)
Понятие «центр тяжести» и формулы, определяющие координаты этой точки, связаны с весом, с тяжестью. Но в динамике встречается такое состояние механических систем, при котором подобное определение недостаточно. Вспомним, например, «состояние невесомости», о котором рассказывали наши космонавты,— здесь понятие «вес» и «тяжесть» теряют свой смысл. Кроме того, в мировом пространстве существуют области, где в состоянии невесомости пребывает всякое тело независимо от его движения, как, например, точка пространства, в которой материальное тело притягивается к Земле и к Солнцу с равными и противоположно направленными силами. В таких случаях понятие «центр тяжести тела» теряет смысл, но сама точка продолжает существовать и не теряет своего значения. Поэтому целесообразно определить эту точку в зависимости не от веса, а от массы частиц.
Пусть какое-либо твердое тело или материальная система подвержены действию силы тяжести, и координаты центра тяжести определяются равенствами (45). Поделим в,этих равенствах и числители и знаменатели на ускорение свободно падающего тела. Координаты точки от деления числителя и знаменателя на одно и то же число не изменятся, но в знаменателе мы получим, согласно (124), не вес, а массу системы, а в числителе—статические моменты масс:
(160)
Точка, определяемая координатами (160), совпадает с центром тяжести, но определение ее связано не с весом, а с массой частиц твердого тела или системы. Ее называют центром инерции, или центром масс. Это понятие шире понятия центра тяжести, так как масса не исчезает даже при таких обстоятельствах, при которых вес неощутим.
Количество движения системы материальных точек равно количеству движения ее центра масс, в котором предполагают сосредоточенной массу всей системы:
Выражение количества движения системы через ее массу и скорость центра масс. Координаты центра инерции C материальной системы, движущейся относительно осей xOyz, принимаемых за неподвижные, определяются равенствами (160), где .va, yk и zk— переменные координаты точек системы. Из этих равенств, освободившись от знаменателя, определим статические моменты массы на данное мгновение:
(161)
Продифференцировав по времени, находим, что проекция количества движения на ось равна произведению массы системы и проекции скорости центра масс на ту же ось:
Но если равны проекции векторов на любую ось, то, следовательно, равны и сами векторы:
Мы нашли, что количество движения всякой материальной системы равно количеству движения ее центра масс, если сосредоточить в нем массу всей системы:
(162)
Задача №1
Вычислить количество движения К однородного диска радиуса r =50 см и массы 80 кг в двух случаях:
1) диск вращается вокруг неподвижной оси, проходящей через ею центр, делая 60 об/мин;
2) диск катится без скольжения и буксования по прямолинейному рельсу, делая 60 об/мин.
Решение. Количество движения диска равно количеству движения точки, масса которой равна массе диска, а скорость равна скорости центра масс диска. Задачу решаем в единицах СИ.
1) В первом случае скорость центра масс равна нулю, следовательно, K=O.
2) Во втором случае скорость центра масс определим как вращательную относительно мгновенного центра скоростей, находящегося в точке касания диска и рельса:
K = 80π =251,20 кг. м/сек.
Ответ. 1) К= 0; 2) К = 251,20 кг. м/сек.
Задача №2
Определить количество движения эллипсографа (рис. 173, а), состоящего из кривошипа OD, линейки А В и двух ползунов, центры масс которых совпадают с шарнирами А и В, соединяющими ползуны с линейкой АВ. Кривошип и линейку рассматривать как однородные стержни веса P и 2Р, причем OD- AD = BD-l, веса ползунов одинаковы и равны Q; кривошип вращается с угловой скоростью ω.
Рис. 173
Решение. Механическая система состоит из четырех тел: кривошипа, линейки и двух ползунов. Найдем центр масс системы. Центр масс кривошипа находится в середине кривошипа (рнс. 173, б). Центр масс линейки и двух ползунов совпадает с их центром симметрии D. Центр масс всего механизма лежит на кривошипе между этими точками. Расстояние центра масс системы от точки О определим по (160):
Умножая это расстояние иа угловую скорость ω кривошипа, найдем скорость центра масс системы:
Умножая υc на массу всей системы, найдем количество движения системы.
Ответ. Количество движения—вектор, равный , перпендикулярный кривошипу и приложенный в центре масс эллипсографа.
Импульсом постоянной силы называют меру механического воздействия на материальную частицу со стороны других материальных объектов за данный промежуток времени, выражающуюся произведением силы на время ее действия:
Импульс постоянной силы. Мы определили механическое действие материальных тел на данную материальную частицу тремя основными характеристиками: величиной, направлением и продолжительностью. Рассматривая это механическое действие лишь за одно мгновение, мы пришли тогда к понятию силы. Но действие всегда происходит во времени, хотя бывают механические действия (не которые случаи удара), продолжительность которых измеряется всего лишь миллионными долями секунды. Если , то векторную величину , направленную по силе и равную по модулю произведению модуля силы на время ее действия, называют импульсом постоянной силы за данный промежуток времени:
(163)
Определим размерность импульса силы в физической системе единиц:
[S]φ = L1M1T-1
Единицей импульса силы в системе СИ является 1 м . кг/сек. Размерность импульса силы в технической системе единиц
[S]r = L0F1T1.
Если сила выражена в кГ, а время — в сек, то единицей импульса силы является 1 кГ. сек.
Размерности импульса силы и количества движения одинаковы.
Импульс переменной силы
Если сила непостоянна по величине или по направлению, то для определения ее импульса за данный промежуток времени надо разбить этот промежуток времени на столь малые интервалы, в течение которых можно пренебречь изменением силы, и определить для каждого такого интервала элементарный импульс. Элементарным импульсом силы называют импульс за столь малый промежуток времени, при котором можно пренебречь изменением силы:
(164)
Импульс переменной силы за конечный промежуток времени выражают пределом геометрической суммы элементарных импульсов за бесконечно малые части данного промежутка:
(164/)
Следовательно, импульс переменной силы за данное время выражается интегралом от вектора по скалярному аргументу t.
Для вычисления импульса переменной силы пользуются его проекциями на оси координат. Построим прямоугольную систему координат и спроецируем элементарный импульс на ось Ох:
dSx = Fdt cos aF = X dt.
Интегрируя в пределах от t0 до t, находим Sx и аналогично Sy и Sz:
(165)
По проекциям (165) легко определить модуль и направляющие косинусы вектора, однако в этом редко встречается необходимость и практически обычно ограничиваются определением проекций (165).
Проекция импульса равнодействующей на любую ось равна сумме проекций импульсов составляющих сил на ту же ось:
Пусть на точку действует несколько сил, проекции которых на какую-либо ось Ox обозначим X1, X2, …, Х„, а проекцию ‘ равнодействующей этих сил обозначим X. Тогда
X = X1 + X2 + … + Хn.
Умножим обе части этого равенства на бесконечно малый промежуток времени dt и проинтегрируем в пределах от t0 до t:
или
Sx = Sxl + Sx2 + … + Sxn. (166)
Итак, проекция импульса равнодействующей на любую ось за данный промежуток времени равна алгебраической сумме проекций импульсов составляющих сил на ту же ось и за то же время, следовательно, импульс равнодействующей равен геометрической сумме импульсов составляющих:
(166/)
Теоремы о количестве движения точки и системы и о движении центра масс
Изменение количества движения материальной точки за какой-либо промежуток времени равно импульсу силы, действующей на точку за тот же промежуток времени:
Теорема об изменении количества движения материальной точки. По основному закону динамики под действием силы материальная точка получает ускорение. Но, чтобы сообщить материальной точке скорость, сила должна действовать в течение некоторого времени. Таким образом, скорость .материальной точке сообщает не сила, а импульс силы. Конечно, эта скорость зависит не только от импульса силы, но и от массы точки.
Напишем дифференциальные уравнения движения материальной точки в форме (127):
Умножая каждое из уравнений (127) на dt и вводя постоянную m под знак дифференциала, получим
dm υx = X dt, dm υy = Ydt, dm υz = Zdt. (167)
Мы нашли, что дифференциал проекции количества движения равен проекции элементарного импульса силы на ту же ось.
Проинтегрируем левую и правую части первого из этих уравнений в соответствующих пределах υ0x, υx и t0, t; аналогично поступив и с двумя другими уравнениями, получим:.
(168)
т. е. изменение проекции количества движения материальной точки на ось равно проекции импульса силы на ту же ось и за то же время. Но если равны проекции на любую ось двух векторов, то, следовательно, равны и эти векторы:
(168/)
т. е. вектор изменения количества движения материальной точки за какое-либо время равен вектору импульса силы, действующей на материальную точку за то же время. Конечно, и здесь под силой надо понимать равнодействующую, если на точку действует не одна, а несколько сил.
Задача №3
Тяжелая точка массой m кг, получив начальную скорость υ0 = 24,5 м/сек, поднимается по негладкой плоскости (рис. 174), наклоненной к плоскости горизонта под углом 30°. Сколько времени будет подниматься точка, если коэффициент трения f = 0,577?
Рис. 174
Решение. Пo заданным силам надо определить время движения точки. Но для решения задачи нет необходимости составлять и интегрировать дифференциальные уравнения движения, а можно воспользоваться теоремой об изменении количества движения. На точку действуют вес G, сила трения Fгр =fG cos 30o и реакция R плоскости. Направим ось Ox по наклонной плоскости вверх. Проекция равнодействующей всех сил на эту ось равна
Если точка двигалась в течение t сек, то проекция импульса силы за это время равна -Gt. Подставляя в уравнение (168) найденное значение Sx, заданное значение υx0 и υx = 0, получим —m 24,5 = —Gt, откуда находим t.
Ответ. t – 2,5 сек.
Задача №4
Материальная точка, масса которой m = 3 кг, двигалась по горизонтальной прямой налево со скоростью 5 м/сек. К ней приложили постоянную силу, направленную вправо. Действие силы прекратилось через 30 сек, и тогда скорость точки оказалась равной 45 м/сек и направленной вправо. Найти величину этой силы.
Решение. Условие задачи дано в физической системе единиц (СИ). По изменению скорости точки надо определить силу, производящую данное движение точки. Таким образом, задача является прямой задачей динамики. Решать ее мы будем, применив теорему об изменении количества движения. Примем горизонтальную прямую, по которой движется точка, за ось Ох, считая направление вправо положительным. Тогда
Sx = F∙30, mυx=3∙45 и mυx0 =—3-5.
Подставляя эти данные в (168), найдем
— F∙30 = + 3∙45 + 3∙5 -+150 кг. м/сек,
откуда определим силу.
Ответ. F = 5 кг∙м сек2 = 5 н.
Производная по времени от суммы проекций количеств движения всех материальных точек системы на какую-либо ось равна сумме проекций всех внешних сил системы на ту же ось:
Теорема о проекциях количеств движения системы. Теорема о количестве движения находит большое применение при исследовании движения системы материальных точек, так как в этой теореме исключены все внутренние силы системы.
Пусть дана механическая система, состоящая из n материальных точек. Распределив все силы, приложенные к точкам этой системы, на две категории (силы внешние и силы внутренние), напишем дифференциальные уравнения движения точек системы в форме (129) в проекциях на ось абсцисс:
Сложив отдельно левые и отдельно правые части написанных уравнений, получим
Но сумма проекций всех внутренних сил системы равна нулю, так как внутренние силы, согласно закону равенства действия и противодействия, попарно равны и противоположно направлены:
В левой части постоянные mk внесем под знак производной, заменим сумму производных производной от суммы и получим для проекций на, ось абсцисс
(169)
Мы не накладывали никаких ограничений на направление оси абсцисс, поэтому мы можем сформулировать следующую общую теорему, называемую теоремой о проекциях количеств движения системы материальных точек: производная по времени от суммы проекций количеств движения всех точек системы на какую-либо ось равна сумме проекций всех внешних сил системы на тy же ось.
Равенства (169) справедливы для любой оси; следовательно, их можно записать в векторной форме:
(169/)
Умножая уравнения (169) на dt и интегрируя, найдем, что изменение суммы проекций количеств движения всех точек системы на какую-либо неподвижную ось за некоторый промежуток времени равно сумме проекций импульсов всех внешних сил системы на ту же ось за то же время:
(170)
При решении задач это уравнение иногда находит применение, но теорему о проекции количеств движения системы чаще применяют в дифференциальном виде (169), чем в конечном виде (170).
Если сумма проекций всех внешних сил системы на какую-либо ось равна нулю, то сумма проекций количеств движения точек системы на эту ось постоянна
Интеграл количеств движения. В частном случае, если сумма проекций всех внешних сил системы на какую-либо ось, например на ось Ох, равна нулю, то уравнение (169) принимает вид
откуда, проинтегрировав, получаем
(171)
Это равенство называют интегралом количества движения системы материальных точек и словами его можно сформулировать так: если сумма проекций всех внешних сил системы на какую-либо ось равна нулю, то сумма проекций количеств движения всех точек системы на эту ось постоянна.
Справедливо и обратное заключение: если сумма проекций количеств движения системы на какую-либо ось постоянна, то сумма проекций всех внешних сил системы на эту ось равна нулю. В самом деле, дифференцируя (171) по времени, найдем, что производная по времени от суммы проекций количеств движения на ось Ox равна нулю и ввиду (169) равна нулю сумма проекций на эту ось всех внешних сил системы.
Если равна нулю сумма проекций всех внешних сил не только на ось Ох, но также и на оси Oy и Oz, то сохраняется не только сумма проекций на оси, но и геометрическая сумма векторов количеств движения точек системы, т. е.
если (171/)
и обратно,
если
Такой случай мы можем представить себе в изолированной материальной системе, т. е. в системе, на точки которой не действуют никакие внешние силы. Примером почти полностью изолированной механической системы может служить солнечная система (см. § 36). Количество движения изолированной системы остается неизменным; этот закон называют иногда принципом сохранения количества движения.
Центр масс системы движется как материальная точка, в которой сосредоточена масса всей системы и к которой приложены все внешние силы:
Теорема о движении центра масс
К теореме о проекциях количеств движения примыкает теорема о движении центра масс. Во многих задачах эти теоремы вполне заменяют друг друга. Уже было показано, что сумму количеств движения всех материальных точек системы можно представить как количество движения одной точки, совпадающей с центром инерции системы, обладающей скоростью центра инерции и массой, равной сумме масс всех точек системы:
Дифференцируя эти равенства по времени и принимая во внимание теорему (169) о проекциях количеств движения на Ox, Oy и Oz, найдем:
(172)
Сравнивая эти уравнения с уравнениями (127), можно убедиться, что движение центра масс математически описывается тремя дифференциальными уравнениями, как и движение материальной точки.
Однако с физической стороны имеется некоторое различие между уравнениями (127) и (172). Всякая материальная точка обладает некоторой массой и движется согласно (127) под действием всех приложенных к ней сил. Центр масс является геометрической точкой и может не совпадать ни с одной из материальных частиц системы.
Уравнения (172) говорят о том, что центр масс (инерции, тяжести) движется как материальная точка, которая имеет массу, равную массе всей системы и к которой приложены силы, равные веем внешним силам, действующим на материальные точки данной системы; внутренние силы не изменяют движения центра масс и не могут нарушить его покоя.
Три уравнения (172) движения центра масс в прямоугольной системе координат могут быть заменены одним векторным уравнением
(172/)
О независимости движения центра масс от внутренних сил. Независимость движения центра масс от действия внутренних сил была установлена Ньютоном. «Центр тяжести системы двух или нескольких тел от взаимодействия тел друг на друга не изменяет ни своего состояния покоя, ни движения», — писал он в «Началах». Теорема о движении центра тяжести (масс) имеет в механике большое значение, а потому необходимо пояснить физическую сущность этой теоремы.
На первый взгляд может показаться, что движение центра масс системы иногда происходит под действием ее внутренних сил. Например, чтобы увеличить скорость парохода, поднимают давление пара, т. е. увеличивают внутренние силы системы. Молодой и здоровый человек с хорошо развитой мускулатурой ног легко обгонит старика с дряблыми мышцами и т. д. и т. п. Но отсюда не следует делать вывод, что центр масс системы передвигается внутренними силами этой системы. В приведенных примерах внутренние силы лишь заставляют точки данной системы воздействовать на окружающие материальные тела, отчего возникают внешние силы, создающие движение центра масс данной системы. Так, человек силой своих мышц (внутренней силой) отталкивается ногами от дороги, отчего в точках соприкосновения подошв с дорогой возникает сила трения (внешняя для человека), направленная в сторону его движения и позволяющая передвигаться всей системе (человеку). Конечно, эта сила зависит от внутренних сил человека, но она является внешней силой, и человек не смог бы идти по поверхности без трения. Ни один силач не может силой своих мышц поднять себя за волосы над Землей. Пароход развивает пары, чтобы быстрее вращать гребной винт и лучше отталкиваться нм от воды. Давление воды на гребной винт является внешней силой для парохода. Никакое давление пара (внутренняя сила) не создало бы движение парохода, если бы не было гребного винта или воды, взаимодействие которых создает силу тяги, являющуюся внешней силой для парохода.
Теоремы о движении центра масс и о количестве движения системы являются основой для расчетов реактивных движений. Ракета для своего полета не нуждается во внешней среде. Газообразные продукты горения с большой скоростью выбрасываются из сопла. Это движение продуктов горения (назовем их пороховыми газами) происходит под действием внутренних сил, а потому не может повлиять па движение центра тяжести всей системы, включающей пороховые газы и корпус ракеты. Если до взрыва ракета была неподвижна, то движение газов так компенсируется движением корпуса ракеты в противоположном направлении, что сумма количеств движения всей системы равна нулю и центр масс всей системы остается неподвижным и после взрыва.
Задача №5
Лодка стоит в неподвижной воде перпендикулярно к берегу, причем расстояние от берега до носа лодки равно 1,6 м, а до кормы 5,2 м. Чтобы пододвинуть лодку к берегу, человек, стоящий на носу лодки, переходит на корму. На каком расстоянии будет нос лодки от берега после перемещения человека, если вес лодки G1 = 100 кГ, нес человека G2= 80 кГ, а сопротивлением воды пренебрегаем?
Решение. Физическая сущность задачи состоит в том, что человек переходит с носа на корму, отчего лодка перемещается в обратном направлении. Перемещение человека на лодке, его вес и вес лодки заданы, требуется определить расстояние, на которое переместится лодка вследствие перемещения человека. Здесь механическое движение человека перелается лодке в качестве механического же движения. В подобных задачах обычно применяют теорему о проекциях количеств движения или аналогичную ей теорему о движении центра масс. Мы покажем применение обеих этих теорем.
При решении почти каждой задачи бывает необходимо уточнить два вопроса: 1) движение какой точки, твердого тела или механической системы надо изучить и 2) какие силы действуют на эту точку, это тело или эту систему. Также необходимо выбрать основные единицы измерения, например единицы СИ, тогда масса лодки m1 = 100 кг, масса человека m2 = 80 кг.
В данной задаче нужно изучить движение механической системы, состоящей из лодки, представляемой се центром инерции, и человека, принимаемого за материальную точку. На точки этой механической системы действуют различные внешние силы (вес лодки, вес человека, архимедова подъемная сила), но все они вертикальны, а нас интересует горизонтальное перемещение лодки, а потому и горизонтальные силы. В системе действуют внутренние силы (сила, с которой человек отталкивается от стланей, идя по лодке, реакция лодки и др.), но внутренние силы не входят в уравнения (169), (172) и несущественны для данной задачи.
Рис. 175
1-й способ. Применим сначала теорему о проекциях количеств движения системы (169). Построим неподвижную систему координат (рис. 175,а), взяв начало в точке О на берегу и направив ось Ox горизонтально вдоль лодки. Сумма проекций всех внешних сил на Ox равна нулю. Система состоит из двух материальных точек — лодки и человека. Равенство (169) принимает вид
Если сумма проекций внешних снл равна нулю, то имеет место интеграл количеств движения (171). Действительно, проинтегрировав, получаем
Постоянную интеграции C1 определим из начальных данных: в начальное мгновение лодка и человек были неподвижны. Таким образом, в начальное мгновение количества движения точек системы и сумма количеств движения равнялись нулю, а потому C1 = 0, т. е.
Умножая на dt и интегрируя, получим
В левой части хк означают перемещения точек системы по оси Ох.
В начальное мгновение этих перемещений не было, а потому, определяя C2 из начальных данных, находим, что C2 = O. Раскроем знак суммы, дав индексу k значения 1 и 2 соответственно числу точек системы:
m1x1 + m2x2 = 0,
т. е. сумма произведений масс точек системы на их перемещения по оси Ox равна нулю. Здесь под перемещением По оси Ox мы понимаем проекцию абсолютного перемещения точки на Ох. Предположим, что лодка переместилась влево на величину—х1 (рис. 175, б). Человек в относительном движении передвинулся вправо на длину лодки (3,6 м), но в то же время лодка перенесла его в своем движении влево, следовательно, х2 = 3,6—x1. Подставляя эти данные и величины масс в предыдущее уравнение, находим
— 100x1 + 80 (3,6—x1) = 0.
У студента, не имеющего достаточного навыка в решении задач, может возникнуть сомнение в правильности знака второго члена. Для проверки знака существует удобное правило: во все члены уравнения х1 должно входить с одним и тем же знаком, если конечно, эти члены находятся по одну сторону от знака равенства. В данном уравнении все члены находятся слева; первый член —100x1, следовательно, второй член должен быть +80 (3,6— x1), так как знак при х1 должен и во втором члене быть таким же, как и в первом члене.
Решая это уравнение, находим перемещение лодки:
2-й способ. Решим ту же задачу, применив теорему о движении центра масс. До начала движения центр масс всей системы был неподвижен —человек пошел вдоль лодки. Сила взаимодействия между человеком и лодкой является внутренней силой системы «лодка с человеком», а потому не может переместить центр масс этой системы. Для решения задачи надо написать выражения абсциссы Xq центра масс системы при двух положениях системы: 1) человек на носу лодки, 2) человек на корме —и приравнять их друг другу, так как общий центр масс системы не переместился.
Определим абсциссу центра масс системы в начальное мгновение (рис. 175, в). Пусть центр массы лодки находится на расстоянии с1 от носа. Тогда его абсцисса x10 = (1,6 + c1) м; х20= 1,6 м. Подставляем в формулу (160):
Обращаем внимание на то, что при этом способе решения задач величины X1 и X2 являются уже не перемещениями точек, а их координатами.
В конечное мгновение, когда человек перейдет на корму (рис. 175, а), а лодка переместится ближе к берегу, общий центр масс всей системы останется на прежнем месте. При конечном положении лодки нос находится от начала координат на искомом расстоянии х. Тогда в этом положении x1=x+c1 и x2 = x+3,6. Подставляя эти значения в формулу (160), получим
Приравниваем друг другу оба выражения абсциссы центра масс системы и находим положение лодки:
180 . 1,6= 180 x + 80 . 3,6, откуда х = 0.
Ответ. Лодка подойдет к берегу.
Задача №6
Сидящий в лодке охотник стреляет вперед в горизонтальном направлении. Пренебрегая трением воды, определить скорость лодки после выстрела, если до выстрела она была неподвижна; масса охотника 70 кг, масса лодки 30 кг, масса заряда 40 г и его начальная скорость 300 м/сек.
Решение. Механическое движение заряда передается в качестве механического же движения («отдача») на охотника и лодку. Примем, что механическая система состоит из двух точек: 1) лодка вместе с охотником и 2) заряд. Сила давления пороховых газов является внутренней по отношению к этой системе, давление газа в ружейном стволе во все стороны одинаково и, как было показано, сумма проекций внутренних сил на любую ось равна нулю. Внешних горизонтальных сил в системе нет. Проведя ось Ox горизонтально в направлении выстрела, получаем интеграл количества движения (171):
В начале выстрела, пока заряд еще не успел приобрести скорость, лодка тоже была неподвижна и, следовательно, C=0. В написанное выражение входят проекции абсолютных скоростей и, раскрывая знак суммы, получим
0,04 (300 — υ2) — 100 υ2 = 0,
где υ2-скорость лодки после выстрела, а (300 — υ2)-абсолютная скорость заряда после выстрела, состоящая из разности скоростей (300 м/сек) заряда но стволу и скорости отдачи (υ2).
Решая это уравнение, находим скорость отдачи.
Ответ. Лодка с охотником движется в сторону, противоположную выстрелу, со скоростью υ2 = 0,12 м/сек.
Задача №7
Вода входит в неподвижный канал (рис. 176) переменного сечения» симметричный относительно вертикальной плоскости, со скоростью υ0=2 м/ceκ под углом α0=90° к горизонту; площадь сечения канала при входе 0,02 м2, скорость воды у выхода из канала υ1 =4 м/сек и составляет угол α1 — 30° с горизонтом. Определить горизонтальную составляющую реакции, которую вода оказывает на стенки канала.
Рис. 176
Решение. Вода течет по каналу, меняя направление и величину своей скорости. Механическое движение воды не исчезает и не возникает вновь, меняется лишь вектор скорости. Требуется определить горизонтальную составляющую реакции, которую вода оказывает па стенки канала. Правильнее было бы назвать эту активную силу «давлением» воды на стенки канала. Все данные этой задачи относятся к воде, и мы будем определять горизонтальную составляющую реакции, оказываемой стенками канала на воду. Эта сила равна и противоположна искомой силе. Система единиц —СИ.
В плоскости симметрии канала проведем горизонтальную ось Ox и напишем уравнение (170)
В правой части есть сумма проекций на горизонтальную ось внешних сил, приложенных к системе (к воде). Единственной горизонтальной внешней силой является горизонтальная составляющая равнодействующей реакций стенок, т. е. та сила, которую мы должны определить. Эта сила при установившемся движении воды является постоянной. Поэтому
За время t в канал πocτyπaeт 0,02 м2 . 2 м/сек. t ceκ = 0,04t м3 = 40t π, или 40t кг воды:
Такое же количество воды покидает канал за то же время. Начальная и конечная скорости даны в условии. Подставляем все эти величины в (170):
Ответ.
Знак минус показывает, что по нашему чертежу проекция реакции отрицательна, т. е. направлена влево. Искомая в задаче горизонтальная составляющая давления на стенку имеет обратное направление—вправо. В задачнике II. В. Мещерского ответ приведен в килограммах. Чтобы перевести ньютоны в кГ, надо умножить число ньютонов на 0,102; имеем 138,4. 0,102 = 14,1 кГ.
Давление струи
Задача №8
Определить давление струи воды на гладкую стенку, если скорость воды υ — 20 м/ceκ, сечение струп σ = 0,005 м2 и струя направлена под углом α – 30° к стенке (рис. 177).
Рис. 177
Решение. Решим задачу сначала в общем виде. Отложим вдоль струн от стенки небольшой отрезок AB=υτ, где τ—малый промежуток времени. У конца В этого отрезка проведем поперечное сечение струи и рассмотрим движение системы частиц воды, находящихся в данное мгновение между этим сечением и стенкой. Общая масса всех частиц рассматриваемой системы m = mk=-σγυτ, где γ—масса 1 см3 жидкости. До соприкосновения со стенкой частицы воды имеют общую скорость и, проекция которой на ось Ox (перпендикулярную стенке) υx = υ sin α. После соприкосновения со стенкой частицы движутся вдоль стенки и υx = 0.
На систему действует реакция F стенки, силой тяжести и давлением на выделенную часть струи со стороны следующих частиц струн, внешних по отношению к выделенной системе, пренебрегаем, так как они ври большой и незначительны но сравнению с F. Подставляя эти данные в (170), имеем
откуда
(173)
Этой формулой определяется давление нa стенку струи жидкости или сыпучего тела. Подставляя данные, находим ответ задачи.
Ответ. F = 102 кГ.
Ударом называют кратковременное взаимодействие тел, вызывающее за ничтожно малый промежуток времени резкое изменение скоростей их точек
Ударный импульс
Иногда материальные тела, находятся во взаимодействии всего лишь тысячные или даже стотысячные доли секунды, но при этом возникают настолько большие силы, что их импульс за столь малый промежуток времени достирает значительной величины и получается резкое, почти мгновенное изменение скоростей точек этих материальных тел. Такое кратковременное взаимодействие тел называют ударом, возникающие при этом силы называют ударными силами, а импульс ударной силы за время удара — мгновенным импульсом.
Ударные силы во многие тысячи раз превосходят вес ударяющего тела. Так, например, легким ударом молотка можно забить в деревянную стену гвоздь, но нужна громадная сила, чтобы тот же гвоздь вдавить, а не вбить в стену. Пуля, вес которой измеряется граммами, при выстреле пробивает доску, но пуля должна была бы весить многие тонны, чтобы сделать в доске такую же дырку своим весом. Поэтому за время удара пренебрегают весом тел и всеми прочими неударными («конечными») силами, пренебрегают перемещениями тел и считают, что векторы скоростей точек ударяющихся тел изменяются мгновенно.
«Количество движения системы никогда не изменяется от ударов при встрече ее тел» (Ньютон)
Прямой центральный удар двух тел
Пусть два тела движутся поступательно и прямолинейно со скоростями υ1 и υ2, причем центры масс C1 и C2 этих тел движутся по одной прямой, которую мы примем за ось Ох. В некоторое мгновение t первое тело, движущееся с большей скоростью, настигает второе и начинается удар, продолжающийся в течение малого отрезка времени τl. Пусть для каждого тела удар является центральным (т. е. мгновенный импульс проходит через центр масс тела) и прямым (т. е. относительные скорости точек соприкосновения тел перед ударом перпендикулярны к поверхности соприкасающихся тел в точке их соприкосновения). Предположим, что удар является неупругим (т. е. таким, при котором полученные за время удара деформации соударяющихся тел полностью сохраняются к концу удара). При отсутствии упругих сил тела не отталкиваются друг от друга и после удара продолжают двигаться с некоторой общей скоростью и. Определим мгновенный импульс S, действующий на каждое из тел со стороны другого. Для каждого из тел этот импульс является импульсом внешней реакции, и мы его легко определим, написав для каждого из тел уравнение (168′). В данном случае эти уравнения примут следующий вид:
(174)
где m1 и m2—массы первого и второго тел, a υ1 и υ2— их скорости (выражаясь точнее, проекции их скоростей на прямую удара Ох) перед ударом. Из этих уравнений определим мгновенный импульс:
(175)
и скорость обоих тел после неупругого удара:
(176)
Если равенство (176) умножим на m1 + m2, то убедимся, что сумма количеств движения обоих тел при ударе не изменилась.
В природе не существует абсолютно неупругих тел и в действительности явление удара не заканчивается к тому мгновению, когда скорости тел становятся равными и. Во время удара тела стремятся восстановить свою первоначальную форму, они отталкиваются друг от друга и отдаляются, имея различные скорости u1 и u2.
Чтобы определить эти скорости и мгновенный импульс, разделим весь процесс удара на две стадии: 1) от начала соприкосновения тел до мгновения, при котором их скорости сравнялись, и 2) от этого мгновения до конца контакта. Удар, при котором полученные за время удара деформации соударяющихся тел частично сохраняются к концу удара, называют не вполне упругим.
Уравнения для первой стадии удара ничем не отличаются от только что полученных, мгновенный импульс определяется по (175) и скорость — по (176). Исходными уравнениями для второй стадии явятся те же уравнения (170), с той лишь разницей, что и будет в них играть роль начальной скорости, а конечными будут u1 и u2. Иным становится мгновенный импульс ударной реакции за эту вторую стадию удара. Обозначим его kS. Физическое значение коэффициента k, зависящего от упругих свойств соударяющихся тел, рассмотрим в дальнейшем. Имеем
(177)
Из системы уравнений (174) и (177) найдем скорости не вполне упругих тел после удара:
u1 =u + k (u-υ1) ; u2 =u + k (u-υ2) ; (178)
Сложив два уравнения (174), а также два уравнения (177), в правых частях получим нуль. Приравнивая друг другу левые части сумм, получим
m1υ1 + m2υ2 = mlul + m2u2.
Таким образом, количество движения системы и при неупругом ударе не изменилось. Это объясняется тем, что для системы соударяющихся тел ударная сила является внутренней, а потому согласно интегралу количеств движения (171) .
Отношение тангенсов угла падения и угла отражения равно коэффициенту восстановления:
k= tg α : tg β
Коэффициент восстановления
Из тех же уравнений (178) легко получить величину k, называемую коэффициентам восстановления. Имеем
(179)
В числителе этого равенства мы видим относительную скорость тел после не вполне упругого удара, а в знаменателе—до удара. Величина k всегда положительна, поэтому взято отношение абсолютных величин относительных скоростей. Таким образом, коэффициент восстановления равен отношению модуля относительной скорости центров масс соударяющихся тел после прямого центрального удара к модулю относительной скорости их до удара.
Если маленький шарик ударяется о гладкую плиту под углом падения α≠0 (рис. 178), то, принимая удар за центральный и раскладывая движение по осям координат, заметим, что ударный импульс направлен перпендикулярно к гладкой плите, а потому проекция скорости шарика на гладкую плиту от удара не изменяется, но изменяется проекция скорости на нормаль к поверхности:
υ1 siπ a = u1 sin kυ1 cos a = u1cos β,
откуда
(180)
т. е. отношение тангенса угла падения к тангенсу угла отражения равно коэффициенту восстановления.
Движение точки переменной массы определяется уравнением И. В. Мещерского
Уравнение движения точки переменной массы
Пусть некоторая материальная точка M движется относительно неподвижной системы координат хОуz под действием силы . Предположим, что масса m точки M не остается постоянной, а изменяется, являясь, например, функцией времени, координат точки M, длины пройденного точкой пути, но не зависит от скорости точки:
m = m(t, х, у, z, s).
В таком случае дифференциальные уравнения (125—127) не выражают движения точки М, так как в этих уравнениях tn~const. Дифференциальные уравнения, описывающие движения точки переменной массы, выведены И. В. Мещерским. Процесс изменения массы точки (или тела) он рассмотрел как присоединение к ней новых частиц («изменяющих масс») или как отделение от нее изменяющих масс. В случае присоединения изменяющие массы положительны, а в случае отделения—отрицательны.
Присоединение или отбрасывание масс возможно лишь при условии, что их скорости не равны скорости точки М. Поэтому в мгновение, в которое изменяющая масса отрывается от точки М или присоединяется к ней, между ними возникает мгновенное взаимодействие, аналогичное удару, изменяющее количество движения точки M. Однако это взаимодействие, конечно, не изменяет количества движения всей материальной системы, состоящей из точки M и изменяющих масс, так как внутренние силы не могут изменить количества движения системы.
Обозначим через ускорение, получаемое точкой M от присоединения или отбрасывания изменяющих масс, и через — ускорение точки М, от равнодействующей приложенных к ней сил, обусловленных другими материальными телами. Таким, образом, полное ускорение точки, M складывается из двух составляющих:
Руководствуясь принципом независимости действия сил, абстрагируемся от влияния внешних сил и найдем выражения для проекций на осн координат ускорения сообщаемого точке M изменяющими массами.
Пусть в мгновение t масса точки М равна m и ее абсолютная скорость равна V. Изменяющая масса dm в то же мгновение пусть имеет абсолютную скорость . Через бесконечно малый промежуток времени dt, когда изменяющая масса присоединится к точке М, их общая скорость vιιpn отсутствии внешних сил) станет равной Выразим по (159′) проекции количества движения системы до присоединения к точке M изменяющей массы:
K0x = mυx + dmux
и после присоединения:
Kx = (m + dm) (υx + dυx).
Приравняем согласно (171) эти два выражения друг другу и после элементарных преобразований получим
Деля на dt, найдем проекцию ускорения на ось абсцисс:
Умножив это равенство на массу m, найдем проекцию прибавочной силы на ось Ox и аналогично на две другие оси:
Учитывая, что, кроме прибавочной силы и независимо от нее, на точку M действует сила F, проекции которой обозначим X, Y и Z, получим дифференциальные уравнения движения точки переменной массы (уравнения И. В. Мещерского):
(181)
Эти равенства справедливы как при dm > 0, так и при dm<0. Они справедливы и для поступательного движения тела, если центр масс этого тела не перемещается в теле значительно от присоединения к телу или отбрасывания изменяющих масс.
Три уравнения Мещерского можно заменить одним уравнением, написанным в векторной форме,
(181/)
Задача №9
Определить скорость ракеты (точки переменной массы) при ее прямолинейном движении и без действия внешних сил, если относительная скорость выбрасываемых газов постоянна и направлена противоположно скорости ракеты.
Решение. Направив ось Ox по скорости ракеты, напишем первое из уравнений Мещерского применительно к данному частному случаю:
Разделим переменные:
Введем некоторые ограничения на изменение массы, а именно предположим, чтo масса m в каждое мгновение пропорциональна значению некоторой функции от времени: m=m0f (t). При t = 0 масса m = m0.
Интегрируя, получаем равенство, которое носит название формулы Циолковского.
Ответ. . Это равенство правильнее называть задачей, а не формулой (см. В. В. Добронравов, H. Н. Никитин и А. П. Дворников, «Курс теоретической механики»).
Горизонтальное движение реактивного самолета
Задача №10
Определить закон движения x=x(t) самолета с жидкостным реактивным двигателем на активном и горизонтальном участке полета, положив, что масса самолета изменяется по линейному закону:
m= m0 (1 —at),
относительная скорость υr отбрасываемых частиц относительно самолета постоянна и аэродинамические силы зависят от квадрата скорости самолета, т. е. считать силу лобового сопротивления
и подъемную силу
Решение. Направим ось абсцисс горизонтально (рнс. 179) по скорости самолета, ось ординат перпендикулярно к ней.
Рис. 179
На самолет по вертикальной оси действуют следующие силы: вес G и подъемная сила Р. При горизонтальном полете самолета они уравновешивают друг друга
По горизонтальной оси на самолет действуют сила лобового сопротивления, направленная против абсолютной скорости и прибавочная сила, направленная против относительной скорости υr, т. е. по движению самолета.
Движение самолета прямолинейное и горизонтальное, его можно описать одним (первым) из уравнений Мещерского (181). В этой задаче оно принимает вид:
Определим квадрат скорости из условия равенства вертикальных сил:
и подставим его в выражение силы лобового сопротивления
Для определения производной массы по времени, продифференцируем линейный закон изменения массы, заданный в условии задачи
Из того же закона видно, что
поэтому
После подстановки найденных выражений в уравнение Мещерского и сокращения на m имеем:
Интегрируя один раз, получим:
Подставляем начальные данные (при t=0, υx=υ0x), имеем
υ0x = C1
Получаем следующее выражение изменения скорости самолета в зависимости от времени
Чтобы получить закон движения самолета, надо в левой части этого выражения представить υx как производную от текущей координаты х по времени, разделить переменные и проинтегрировать
Возьмем отдельно последний интеграл
Следовательно,
Определим C2 по начальным данным, положив, что при t = 0 и х = 0, тогда
Подставив в предыдущее равенство вместо C2 его значение найдем закон, определяющий движение самолета на активном участке пути. Естественно, что в эту формулу проекции входят со своими знаками, например, в рассмотренной задаче проекция относительной скорости υlx отрицательна, а проекция начальной скорости υox положительна.
Ответ.
- Момент количества движения
- Мощность и работа силы
- Потенциальная энергия
- Обобщенные координаты системы
- Координатный способ определения движения точки
- Касательное и нормальное ускорения точки
- Основные законы динамики
- Колебания материальной точки
§2. Законы Ньютона. Импульс или количество движения материальной точки
В основе динамики материальной точки лежат законы (аксиомы) Ньютона. Напомним ключевые определения и законы.
Система отсчёта, в которой любая материальная точка, не взаимодействующая с другими телами (такая точка называется свободной), движется равномерно и прямолинейно или покоится, называется инерциальной.
инерциальные системы отсчёта (ИСО) существуют
в ИСО приращение импульса материальной точки пропорционально силе и происходит по направлению силы:
`Delta vec p = vec F * Delta t` (1)
Импульсом (или количеством движения) материальной точки называют физическую величину, определяемую произведением её массы на вектор скорости в данной системе отсчёта:
`vec p = m * vec v`.
`vec F` – сумма сил, действующих на материальную точку. Величину `vec F * Delta t` называют импульсом силы за время от `t` до `t + Delta t`, в течение которого силу можно считать неизменной по величине и направлению. Величину `Delta vec p = vec p (t + Delta t) – vec p (t)` называют приращением импульса материальной точки за время от `t` до `t + Delta t`. Поэтому второй закон Ньютона для материальной точки можно сформулировать так:
в ИСО приращение импульса материальной точки равно импульсу силы.
Отметим, что при изучении динамики второй закон Ньютона часто формулируют следующим образом:
в ИСО ускорение материальной точки прямо пропорционально сумме сил, действующих на неё, и обратно пропорционально её массе:
`vec a = vec F/m` (2)
Если масса тела остаётся неизменной, то `Delta vec p = Delta (m vec v) = m Delta vec v`, и соотношение (1) принимает вид `m Delta vec v = vec F Delta t`. С учётом `vec a = (Delta vec v)/(Delta t)` приходим к эквивалентности соотношений (1) и (2) в рассматриваемом случае.
В настоящем Задании представлены задачи, для решения которых привлекается второй закон Ньютона (см.(1)), устанавливающий равенство приращений импульса материальной точки и импульса силы.
при взаимодействии двух материальных точек сила `vecF_(12)`, действующая на первую материальную точку со стороны второй, равна по величине и противоположна по направлению силе `vecF_(21)`, действующей со стороны первой материальной точки на вторую:
`vecF_(12) = – vecF_(21)`.
1) силы возникают парами и имеют одинаковую природу, они приложены к разным материальным точкам,
2) эти силы равны по величине,
3) они действуют вдоль одной прямой в противоположных направлениях.
Заметим, что согласно третьему закону Ньютона обе силы должны быть равны по величине в любой момент времени независимо от движения взаимодействующих тел. Другими словами, если в системе двух взаимодействующих тел изменить положение одного из тел, то это изменение мгновенно скажется на другом теле, как бы далеко оно ни находилось. На самом деле скорость распространения взаимодействий конечная; она не может превзойти скорость света в вакууме. Поэтому третий закон Ньютона имеет определённые пределы применимости. Однако в классической механике при малых скоростях взаимодействующих тел он выполняется с большой точностью.
Второй закон Ньютона (уравнение движения) можно представить в виде теоремы об изменении импульса материальной точки:
`(Delta vec p)/(Delta t) = vec(F)` (3)
Скорость изменения импульса материальной точки в инерциальной системе отсчёта равна сумме сил, действующих на эту точку.
Напомним, что для решения задач динамики материальной точки следует:
привести «моментальную фотографию» движущегося тела, указать приложенные к нему силы;
выбрать инерциальную систему отсчёта;
составить уравнение (3);
перейти к проекциям приращения импульса и сил на те или иные направления;
решить полученную систему.
Рассмотрим характерные примеры.
К телу, первоначально покоившемуся на шероховатой горизонтальной поверхности, прикладывают в течение времени t1=10 сt_1=10;mathrm с горизонтальную силу величиной F=5 HF=5;mathrm H. После прекращения действия силы тело движется до остановки t2=40 ct_2=40;mathrm c. Определите величину $$ {F}_{mathrm{тр}}$$ силы трения скольжения, считая её постоянной.
На рис. 1 показаны ИСО и силы, действующие на тело в процессе разгона. По второму закону Ньютона
`(Delta vec p)/(Delta t) = M vec g + vec N + vecF_(“тр”) + vec F`.
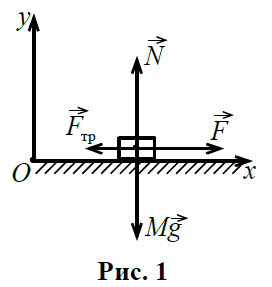
Переходя к проекциям на горизонтальную ось, находим элементарные приращения импульса в процессе разгона
$$ ∆{p}_{x}=left(F-{F}_{mathrm{тр}}right)∆t$$
и в процессе торможения `(F = 0)`
$$ ∆{p}_{x}=-{F}_{mathrm{тр}}∆t$$.
Просуммируем все приращения импульса тела от старта до остановки:
`sum Delta p_x = sum_(0 <= t <= t_1) (F – F_sf”тр”) Delta t + sum_(t_1 <= t <= t_1 + t_2) (-F_sf”тр” ) Delta t`.
Напомним, что для любой физической величины сумма приращений равна разности конечного и начального значений. Тогда
px конечн-px начальн=F-Fтрt1+-Fтрt2p_{x;mathrm{конечн}}-p_{x;mathrm{начальн}}=left(F-F_mathrm{тр}right)t_1+left(-F_mathrm{тр}right)t_2.
С учётом равенств px конеч=0p_{x;mathrm{конеч}}=0, px начальн=0p_{x;mathrm{начальн}}=0 и независимости сил от времени приходим к ответу на вопрос задачи:
Fтр=t1t1+t2F=1010+40·5=1 HF_mathrm{тр}=dfrac{t_1}{t_1+t_2}F=dfrac{10}{10+40}cdot5=1;mathrm H.
Далее рассмотрим пример, в котором одна из сил зависит от времени.
На какое максимальное расстояние `L_max` улетит мяч, если в процессе удара футболист действует на мяч постоянной по направлению силой, величина которой изменяется по закону, представленному на рис. 2. Длительность удара τ=8·10-3 ctau=8cdot10^{-3};mathrm c, максимальная сила Fmax=3,5·103 HF_max=3,5cdot10^3;mathrm H, масса мяча m=0,5 кгm=0,5;mathrm{кг}. Здесь и далее ускорение свободного падения g=10 м/с2g=10;mathrm м/mathrm с^2. Сопротивление воздуха не учитывайте.
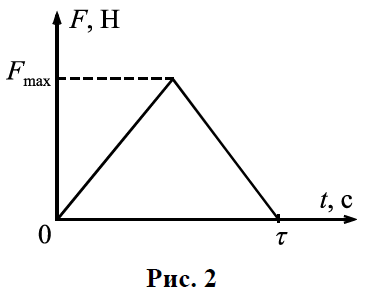
В процессе удара на мяч действуют две силы: mg=0,5·10=5 Hmg=0,5cdot10=5;mathrm H – тяжести и сила `vec F`, с которой футболист действует на мяч,
F≤Fmax=3,5·103 HFleq F_max=3,5cdot10^3;mathrm H.
Так как `mg < < F_max`, силой тяжести пренебрежём. Из кинематики известно, что максимальная дальность полёта наблюдается при старте под углом `alpha = pi/4`. Процесс удара показан на рис. 3.

По второму закону Ньютона приращение импульса равно импульсу силы `Delta vec p = vec F * Delta t`. Переходя к проекциям приращения импульса и силы на ось `Ox`, получаем
`Delta p_x = F Delta t`.
Просуммируем элементарные приращения импульса мяча за время удара
`sum Delta p_x = mv – 0 = sum_(0 <= t <= tau) F Delta t`.
Импульс силы `sum_(0 <= t <= tau) F(t) Delta t` за время удара численно равен площади под графиком зависимости этой силы от времени (каждое слагаемое `F(t) Delta t` в импульсе силы можно интерпретировать как площадь элементарного прямоугольника со сторонами `F(t)` и `Delta t` на графике зависимости `F(t)`). Тогда импульс силы `F` за время удара равен
`sum_(0 <= t <= tau) F Delta t = (F_max tau)/2`
и в рассматриваемом случае не зависит от того, в какой именно момент времени сила достигает максимального значения (площадь треугольника равна половине произведения основания на высоту!). Далее находим импульс мяча в момент окончания действия силы
`mv = 1/2 F_max * tau`.
Отсюда находим начальную скорость полёта мяча
`v = (F_max * tau)/(2m) = (3,5 * 10^3 * 8 * 10^-3)/(2 * 0,5) = 28 sf”м/с”`
и максимальную дальность (старт под углом `alpha = pi/4`) полёта
`L_max = (v^2)/g = (28^2)/(10) ~~ 78 sf”м”`.
В рассматриваемом модельном примере получен несколько завышенный по сравнению с наблюдениями результат.
На вступительных испытаниях и олимпиадах в вузах России регулярно предлагаются задачи динамики, в которых наряду с «традиционными» силами: силой тяжести, силой Архимеда и т. д., на тело действует сила лобового сопротивления. Такая сила возникает, например, при движении тел в жидкостях и газах. Вопрос о движении тел в жидкостях и газах имеет большое практическое значение. Знакомство с действием такого рода сил уместно начинать, как это принято в физике, с простейших модельных зависимостей, в которых сила сопротивления принимается пропорциональной скорости или её квадрату.
Мяч, брошенный с горизонтальной поверхности земли под углом `alpha = 60^@` к горизонту со скоростью `v = 10 sf”м/с”`, упал на землю, имея вертикальную составляющую скорости по абсолютной величине на `delta = 30 %` меньшую, чем при бросании. Найдите время полёта мяча. Считать, что сила сопротивления движению мяча пропорциональна его скорости.
Согласно второму закону Ньютона приращение импульса пропорционально силе и происходит по направлению силы:
`m * Delta vec v = (m vec g – k vec v) * Delta t`.
Переходя к проекциям сил и приращения скорости на вертикальную ось, получаем
`m * Delta v_y = – mg * Delta t – k * v_y * Delta t`.
Заметим, что элементарное перемещение мяча по вертикали равно `Delta y = v_y * Delta t`, и перепишем последнее соотношение в виде:
`m * Delta v_y = – mg * Delta t – k * Delta y`.
Просуммируем все приращения вертикальной проекции импульса по всему времени полёта, т. е. от `t = 0` до `t = T`:
`m * (sum Delta v_y) = – mg * (sum Delta t) – k* (sum Delta y)`.
Переходя к конечным приращениям, получаем
`m (v_y (T) – v_y (0)) = – mg (T – 0) – k (y (T) – y (0))`.
Точки старта и финиша находятся в одной горизонтальной плоскости, поэтому перемещение мяча по вертикали за время полёта нулевое
`y (T) – y (0) = 0`.
Тогда `- (1 – delta) mv_0 sin alpha – mv_0 sin alpha = – mgT`. Отсюда находим продолжительность полёта мяча:
`T = (v_0 sin alpha)/(g) (2 – delta) = (10 * sin 60^@)/(10) (2,0 – 0,3) ~~ 1,5 sf”с”`.
В следующем примере рассматривается удар, в ходе которого две очень большие силы, «согласованно» действуют во взаимно перпендикулярных направлениях.
Кубик, движущийся поступательно со скоростью `v` (рис. 4) по гладкой горизонтальной поверхности, испытывает соударение с шероховатой вертикальной стенкой.
Коэффициент трения `mu` скольжения кубика по стенке и угол `alpha` известны. Одна из граней кубика параллельна стенке. Под каким углом `beta` кубик отскочит от стенки? Считайте, что перпендикулярная стенке составляющая скорости кубика в результате соударения не изменяется по величине.
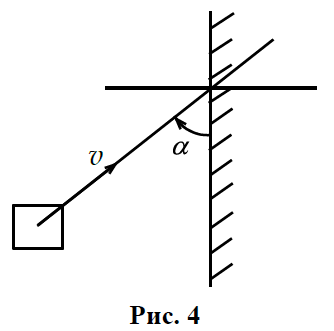
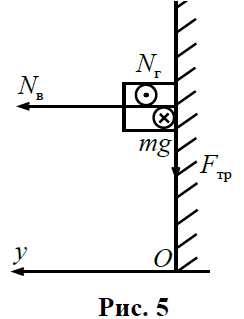
Силы, действующие на кубик в процессе соударения, показаны на рис. 5.
По второму закону Ньютона
`Delta vec p = (m vec g + vecN_(“г”) + vecF_(“тр”) + vecN_(“в”) ) * Delta t`.
Переходя к проекциям на горизонтальные оси `Ox` и `Oy`, получаем
`Delta p_x = – F_sf”тр” Delta t`, `Delta p_y = N_sf”в” Delta t`.
Просуммируем приращения `Delta p_y = N_sf”в” Delta t` по всему времени `tau` соударения, получим:
`sum Delta p_y = p_y (tau) – p_y (0) = mv sin alpha – (- mv sin alpha) = sum_(0 <= t <= tau) N_sf”в” Delta t`.
В процессе удара в любой момент времени `F_sf”тр” = mu N_sf”в”`, следовательно, во столько же раз отличаются импульсы этих сил за время соударения
`sum_(0 <= t <= tau) F_sf”тр” Delta t = mu sum_(0 <= t <= tau) N_sf”в” Delta t = mu 2 mv sin alpha`.
Тогда легко вычислить проекцию `v_x (tau)` скорости кубика после соударения. Для этого просуммируем приращения
`Delta p_x = – F_sf”тр” Delta t = – mu N_sf”в” Delta t`
по всему времени `tau` соударения, получим:
`sum Delta p_x = p_x (tau) – p_x (0) = mv_x (tau) – mv cos alpha = – sum _(0 <= t<= tau) F_sf”тр” Delta t =- mu 2 mv sin alpha`.
Отсюда `v_x (tau) = v (cos alpha – 2 mu sin alpha)`. Далее, считая `v_x (tau) > 0`, получаем
`bbb”tg” beta = (v_y (tau))/(v_x (tau)) = (sin alpha)/(cos alpha – 2 mu sin alpha)`.
Лекция 3
Краткое содержание: Общие теоремы динамики точки. Количество движения точки. Элементарный и полный импульс силы. Теорема об изменении количества движения точки. Момент количества движения точки. Теорема об изменении момента количества движения точки. Работа силы. Мощность. Кинетическая энергия точки. Теорема об изменении кинетической энергии точки. Принцип Даламбера для материальной точки
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ ТОЧКИ
Для решения многих задач динамики вместо непосредственного интегрирования дифференциальных уравнений движения оказывается более эффективным пользоваться так называемыми общими теоремами, которые являются следствием основного закона динамики.
Количество движения точки
Количеством движения материальной точки  называется вектор, равный произведению массы точки
называется вектор, равный произведению массы точки  на ее скорость
на ее скорость  .
. 
Количество движения точки в физике часто называют импульсом материальной точки.
Проекции количества движения точки на прямоугольные декартовы оси координат равны:
 ,
,  ,
, 
Рекомендуемые материалы
Единицей измерения количества движения в СИ является – 
Элементарный и полный импульс силы.
Действие силы  на материальную точку в течении времени
на материальную точку в течении времени  можно охарактеризовать элементарным импульсом силы
можно охарактеризовать элементарным импульсом силы  .
.
Полный импульс силы за время  , или импульс силы
, или импульс силы  , определяется по формуле
, определяется по формуле  . (Полный интеграл за время от элементарного импульса).
. (Полный интеграл за время от элементарного импульса).
В частном случае, если сила постоянна и по величине , и по направлению ( ),
),  .
.
Проекции импульса силы на прямоугольные декартовы оси координат равны:



Единицей измерения импульса в СИ является – 
Теорема об изменении количества движения точки.
Теорема. Производная по времени от количества движения точки равна действующей на точку силе.
Запишем основной закон динамики  в виде
в виде  . Так как масса постоянна, то внесем ее под знак производной.
. Так как масса постоянна, то внесем ее под знак производной.
Тогда  , (*)
, (*)
что и требовалось доказать.
В проекциях на координатные оси уравнение (*) можно представить в виде:



Теорема импульсов (в дифференциальной форме). Дифференциал от количества движения точки равен элементарному импульсу силы, действующей на точку.
Умножим левую и правую части уравнения (*) на и получим
 (**)
(**)
В проекциях на координатные оси получаем:
 ,
,
 ,
,
 .
.
Теорема импульсов (в интегральной форме). Изменение количества движения точки за какой-либо промежуток времени равно импульсу силы за этот же промежуток времени.
Интегрируя обе части уравнения (**) по времени в пределах от нуля до получаем:

В проекциях на координатные оси получаем:
 ,
,
 ,
,

Момент количества движения точки.
В некоторых задачах в качестве динамической характеристики движущейся точки вместо самого количества движения рассматривают его момент относительно какого-либо центра или оси. Эти моменты определяются также как и моменты силы.

Моментом количеством движения материальной точки  относительно некоторого центра О называется вектор, определяемый равенством
относительно некоторого центра О называется вектор, определяемый равенством 
Момент количества движения точки называют также кинетическим моментом.
Момент количества движения относительно какой-либо оси  , проходящий через центр О, равен проекции вектора количества движения на эту ось
, проходящий через центр О, равен проекции вектора количества движения на эту ось  .
.
Если количество движения  задано своими проекциями
задано своими проекциями  на оси координат и даны координаты
на оси координат и даны координаты  точки
точки  в пространстве, то момент количества движения относительно начала координат вычисляется следующим образом:
в пространстве, то момент количества движения относительно начала координат вычисляется следующим образом:
 Проекции момента количества движения на оси координат равны:
Проекции момента количества движения на оси координат равны:



Единицей измерения количества движения в СИ является –  .
.
Теорема об изменении момента количества движения точки.
Теорема. Производная по времени от момента количества движения точки, взятого относительно какого-нибудь центра, равна моменту действующей на точку силы относительно того же центра.

Доказательство: Продифференцируем момент количества движения по времени 
 ,
,  , следовательно
, следовательно  , (*)
, (*)
что и требовалось доказать.
Теорема. Производная по времени от момента количества движения точки, взятого относительно какой-либо оси, равна моменту действующей на точку силы относительно той же оси.
Для доказательства достаточно спроектировать векторное уравнение (*) на эту ось. Для оси это будет выглядеть так: 
Следствия из теорем:
1. Если момент силы относительно точки равен нулю, то момент количества движения относительно этой точки величина постоянная.
 ,
, 

2. Если момент силы относительно оси равен нулю, то момент количества движения относительно этой оси величина постоянная.
 ,
, 
Работа силы. Мощность.
Одна из основных характеристик силы, оценивающих действие силы на тело при некотором его перемещении.
Элементарная работа силы скалярная величина равная произведению элементарного перемещения на проекцию силы на это перемещение.

 .
.  ,
,

Единицей измерения работы в СИ является – 
При  при
при 
Частные случаи: 


Элементарное перемещение равно дифференциалу радиуса вектора точки приложения силы.
Элементарная работа силы равна скалярному произведению силы на элементарное перемещение или на дифференциал радиуса вектора точки приложения силы.

Элементарная работа силы равна скалярному произведению элементарного импульса силы на скорость точки.

Если сила  задана своими проекциями (
задана своими проекциями ( ) на оси координат и элементарное перемещение задано своими проекциями (
) на оси координат и элементарное перемещение задано своими проекциями ( ) на оси координат, то элементарная работа силы равна:
) на оси координат, то элементарная работа силы равна:
 (аналитическое выражение элементарной работы).
(аналитическое выражение элементарной работы).
Работа силы на любом конечном перемещении  равна взятому вдоль этого перемещения интегралу от элементарной работы.
равна взятому вдоль этого перемещения интегралу от элементарной работы.

Мощностью силы называется величина, определяющая работу, совершаемую силой в единицу времени. В общем случае мощность равна первой производной по времени от работы.
 ,
, 
Мощность равна скалярному произведению силы на скорость.
Единицей измерения мощности в СИ является – 
В технике за единицу силы принимается  .
.
Пример 1. Работа силы тяжести.
 Пусть точка М, на которую действует сила тяжести Р, перемещается из положения
Пусть точка М, на которую действует сила тяжести Р, перемещается из положения  в положение
в положение  . Выберем оси координат так, чтобы ось
. Выберем оси координат так, чтобы ось  была направлена вертикально вверх.
была направлена вертикально вверх.
Тогда,  ,
,  ,
,  и
и

Работа силы тяжести равна взятому со знаком плюс или минус произведению модуля силы на вертикальное перемещение точки ее приложения. Работа положительна, если начальная точка выше конечной, и отрицательна, если начальная точка ниже конечной.
Пример 2. Работа силы упругости.
Рассмотрим материальную точку закрепленную на упругом элементе жесткости с, которая совершает колебания вдоль оси х. Сила упругости (или восстанавливающая сила)  . Пусть точка М, на которую действует только сила упругости, перемещается из положения
. Пусть точка М, на которую действует только сила упругости, перемещается из положения  в положение
в положение  . (
. ( ,
,  ).
).


Работа силы упругости равна половине произведения жесткости упругого элемента на разность квадратов начального и конечного удлинения (или сжатия) упругого элемента.
Работа силы упругости равна площади фигуры (трапеции) расположенной под кривой  .
. 
Пример 3. Работа и мощность пары сил.
 Пусть пара сил приложена к вращающемуся вокруг неподвижной оси телу. Элементарная работа пары сил равна
Пусть пара сил приложена к вращающемуся вокруг неподвижной оси телу. Элементарная работа пары сил равна  . Полная работа пары сил равна
. Полная работа пары сил равна 
 – угол поворота тела,
– угол поворота тела,  – момент пары сил.
– момент пары сил.
Мощность пары сил равна

Кинетическая энергия точки
Кинетической энергией материальной точки (или ее живой силой) называют половину произведения массы точки на квадрат ее скорости.

Теорема об изменении кинетической энергии точки.
Теорема. Дифференциал кинетической энергии точки равен элементарной работе силы, действующей на точку.

Доказательство: Основной закон динамики  .
.
Умножим левую и правую части уравнения скалярно на  справа, получаем
справа, получаем  .
.  – элементарная работа.
– элементарная работа.
 – дифференциал от кинетической энергии.
– дифференциал от кинетической энергии.
, что и требовалось доказать.
Теорема. Производная по времени от кинетической энергии точки равна мощности, подводимой к этой точке.

Теорема. Изменение кинетической энергии точки на каком-либо перемещении равно работе силы, действующей на точку на этом же перемещении.

Принцип Даламбера для материальной точки
Уравнение движения материальной точки относительно инерциальной системы отсчета под действием приложенных активных сил и сил реакции связей имеет вид:
Информация в лекции “18 Нечеткие множества” поможет Вам.
 ,
,
 – равнодействующая активных сил,
– равнодействующая активных сил,  – равнодействующая сил реакции связей.
– равнодействующая сил реакции связей.
Силой инерции материальной точки называют произведение массы точки на вектор ускорения, взятое с обратным знаком, т.е.  .
.
Если использовать понятие силы инерции, то основной закон динамики принимает вид: 
Принцип Даламбера. При движении материальной точки активные силы и силы реакции связей вместе с силой инерции точки образуют равновесную систему сил.
Принцип Даламбера называют еще методом кинетостатики. Задачи динамики с помощью этого метода сводятся к задачам статики.
Теоремы об изменении количества движения и о движении центра масс в теоретической механике
Содержание:
Количество движения точки и системы:
Одной из мер движения точки или системы является количество их движения.
Количеством движения материальной точки
Количество движения точки в физике часто называют импульсом материальной точки.
Проекции количества движения точки на прямоугольные декартовы оси координат:
Размерность количества движений в СИ — или . Количеством движения системы называют векторную сумму количеств движений отдельных точек систем, т. е.
и, следовательно, проекции количества движения системы на прямоугольные декартовы оси координат
Вектор количества движения системы в отличие от вектора количества движения точки не имеет точки приложения. Вектор количества движения точки считается приложенным в самой движущейся материальной точке, а вектор является свободным вектором.
Вычисление количества движения системы
Количество движения системы можно выразить через массу системы и скорость центра масс :
В проекциях на прямоугольные декартовы оси соответственно
где — координаты центра масс системы. Выведем формулу (6):
где — радиус-вектор -й точки системы (рис. 40).
Рис. 40
По формуле для радиуса-вектора центра масс,
Подставляя значение статического момента массы (8) в (7), имеем
так как масса системы не изменяется при движении системы.
Элементарный и полный импульсы силы
Действие силы на материальную точку в течение времени можно охарактеризовать так называемым элементарным импульсом силы . Полный импульс силы за время , или импульс силы , определяют по формуле
Проекции импульса силы на прямоугольные оси координат выражаются формулами
Единица импульса силы — .
Теорема об изменении количества движения точки
Дифференциальное уравнение движения материальной точки под действием силы можно представить в следующей векторной форме:
Так как масса точки принята постоянной, то ее можно внести под знак производной. Тогда
Формула (10) выражает теорему об изменении количества движения точки в дифференциальной форме: первая производная по времени от количества движения точки равна действующей на точку силе.
В проекциях на координатные оси (10) можно представить в виде
Рис. 41
Если обе части (10) умножить на , то получим другую форму этой же теоремы — теорему импульсов в дифференциальной форме:
т. е. дифференциал от количества движения точки равен элементарному импульсу силы, действующей на точку.
Проецируя обе части (11) на координатные оси, получаем
Интегрируя обе части (11) в пределах от нуля до (рис. 41), имеем
где — скорость точки в момент ; — скорость при ; —импульс силы за время .
Выражение в форме (12) часто называют теоремой импульсов в конечной (или интегральной) форме: изменение количества движения точки за какой-либо промежуток времени равно импульсу силы за тот же промежуток времени. В проекциях на координатные оси эту теорему можно представить в следующем виде:
Для материальной точки теорема об изменении количества движения в любой из форм, по существу, не отличается от дифференциальных уравнений движения точки.
Теорема об изменении количества движения системы
Аналогично тому, как для одной материальной точки, выведем теорему об изменении количества движения для системы в различных формах. Пусть к точкам системы приложены внешняя и внутренняя силы. Тогда для каждой точки можно применить теорему об изменении количества движения, например в форме (10) (см. рис. 40):
Суммируя по всем точкам системы правые и левые части этих соотношений и учитывая, что сумма производных равна производной от суммы, получаем
Так как, по свойству внутренних сил и определению количества движения системы,
то приведенное соотношение можно представить в виде
Выражение (13) является теоремой об изменении количества движения системы в дифференциальной форме: производная по времени от количества движения системы равна векторной сумме всех внешних сил, действующих на систему. В проекциях на прямоугольные декартовы оси координат
т. е. производная по времени от проекции количества движения системы на какую-либо координатную ось равна сумме проекций всех внешних сил системы на ту же ось.
Умножая обе части (13) на , получаем теорему импульсов для системы в дифференциальной форме:
т. е. дифференциал количества движения системы равен векторной сумме элементарных импульсов всех внешних сил, действующих на систему. В проекциях на координатные оси эта теорема примет вид
Вычисляя интегралы от обеих частей (14) по времени- от нуля до получаем теорему импульсов для системы в конечной или интегральной форме:
где — количество движения системы в момент ; — количество движения в момент ; — импульс внешней силы, действующей на -ю точку за время ; .
Теорема импульсов для системы в конечной форме формулируется так: изменение количества движения системы за какое-либо время равно векторной сумме всех импульсов внешних сил, действующих на систему за то же время. В проекциях на прямоугольные оси согласно (15) имеем:
Внутренние силы системы не входят явно в теорему об изменении количества движения системы в любой из форм и, следовательно, не влияют непосредственно на изменение количества движения системы. Они могут влиять на изменение количества движения только неявно через внешние силы.
Из теоремы об изменении количества движения для точки и системы при некоторых условиях для внешних сил можно получить так называемые первые интегралы системы дифференциальных уравнений точки и системы. Эти первые интегралы называют законами сохранения количества движения или проекции количества движения на ось. Рассмотрим эти законы сохранения для точки и системы одновременно, считая материальную точку механической системой, состоящей из одной точки.
Законы сохранения количества движения
Законы сохранения количества движения системы получаются как частные случаи теоремы об изменении количества движения для системы в зависимости от особенностей системы внешних сил, приложенных к рассматриваемой механической системе, а для одной точки — от особенностей сил, действующих на точку. Внутренние силы при этом могут быть любыми, так как они явно не влияют на изменение количества движения системы.
Возможны два частных случая.
1. Если векторная сумма всех внешних сил, приложенных к системе, равна нулю, т. е. , то из теоремы об изменении количества движения системы, например в форме (13), следует, что
Этот закон (точнее, частный случай теоремы) формулируется так: если главный вектор внешних сил системы равен нулю, то количество движения системы постоянно по величине и направлению. В проекциях на координатные оси, по этому закону,
где — постоянные величины.
В соотношения (16) и (16′) входят производные от координат точек по времени не выше первого порядка и не входят вторые производные от этих координат. Следовательно, эти соотношения являются первыми интегралами дифференциальных уравнений системы (3).
2. Если равна нулю проекция главного вектора внешних сил на какую-либо координатную ось , т. е. , то из (13′) имеем
Выражение (17) является законом сохранения проекции количества движения системы: если проекция главного вектора всех внешних сил системы на какую-либо ось равна нулю, то проекция количества движения на ту же ось является постоянной величиной.
Применим закон сохранения количества движения системы для объяснения принципа реактивного движения. Пусть, например, система состоит из двух сочлененных твердых тел, находящихся в покое и свободных от действия внешних сил. Тогда для рассматриваемой системы количество движения все время постоянно и равно нулю. Допустим, что при взрыве пиропатрона (действие внутренних сил) первому телу массой сообщена скорость . Тогда скорость второго тела массой определится из закона сохранения количества движения
т. е. второе тело движется в сторону, противоположную первому телу. Если его движению препятствует какая-либо связь, то рассматриваемое тело давит на эту связь с некоторой силой по направлению скорости . Эту силу называют реактивной. В реактивных двигателях она создается за счет истечения газа с большой скоростью (около ) из сопла двигателя.
Теорему об изменении количества движения в той или другой форме удобно применять для решения задач именно в рассмотренных частных случаях, хотя в некоторых случаях ее применяют и в общем случае. Отметим, что внутренние силы не влияют на изменение количества движения в изолированных системах, т. е. в системах, которые не соприкасаются с другими телами, не принадлежащими к рассматриваемой системе, или окружающей систему материальной средой.
В неизолированных механических системах внутренние силы, вызывая движение отдельных частей системы вследствие взаимодействия с внешними телами или окружающей материальной средой, могут вызвать внешние силы в виде сил реакций связей или изменения активных сил, которые могут изменить количество движения системы.
Количество движения системы может зависеть от внутренних сил только неявно, через внешние силы.
Рис. 42
Пример №1
Через изогнутую под прямым углом трубу постоянного сечения за 1 с протекает жидкость массой (рис. 42). Скорость течения жидкости постоянна, т. е. одна и та же у всех частиц жидкости. Определить силу, с которой жидкость давит на участок трубы вследствие поворота потока на прямой угол.
Решение:
Применим к объему жидкости, заключенному между стенками трубы и поперечными сечениями 1 и 2, теорему об изменении количества движения в форме теоремы импульсов за промежуток времени, равный 1 с. За секунду точки жидкости из сечения 1 сместятся на расстояние и займут положение 1′, а точки жидкости из сечения 2 займут положение 2′. По теореме импульсов для выделенного объема жидкости имеем
где — количество движения жидкости, заключенной между сечениями 1 и 2; — количество движения жидкости, заключенной между сечениями 1′ и 2′; —главный вектор распределенных сил, с которыми стенки трубы действуют на выделенный объем жидкости.
Так как в общей части объема жидкости количества движения, входящие в и , взаимно уничтожаются при их вычитании, то из (а) получаем
Сила давления жидкости на стенки трубы по закону о равенстве действия и противодействия выразится в виде
Проецируя (б) на оси координат, получаем
так как . После этого
Направление силы давления жидкости указано на рисунке.
Рис. 43
Если бы через сечение 1 жидкость не поступала, а образовывалась внутри трубы, как в реактивном двигателе образуются газы после сгорания топлива, а через сечение 2 она выходила (рис. 43), то сила , согласно (б), имела бы значение .
Эта сила является частью реактивной силы двигателя вследствие выброса продуктов сгорания из двигателя, являющегося источником газа. Другая часть реактивной силы двигателя, равная , получается за счет разности давлений , в струе выходящего из сопла газа и давления в среде , куда выходит из двигателя газ. Здесь — площадь выходного сечения сопла.
Полная реактивная сила двигателя
По направлению реактивная сила всегда противоположна скорости v выходящего из двигателя газа. Для получения большой скорости выходящего газа сопло двигателя следует расширять по направлению к выходному его сечению при сверхзвуковых скоростях истечения газа.
Теорема о движении центра масс системы
Следствием теоремы об изменении количества движения системы является теорема о движении центра масс системы. По теореме об изменении количества движения системы (13),
Но количество движения системы можно вычислить по формуле (6):
где — скорость центра масс; — масса системы.
Подставляя (6) в (13) и учитывая, что масса системы постоянна, получаем теорему о движении центра масс в векторной форме:
где — ускорение центра масс.
Рис. 44
Теорема о движении центра масс формулируется так: центр масс системы движется так же, как и материальная точка, масса которой равна массе всей системы, если на точку действуют все внешние силы, приложенные к рассматриваемой механической системе.
Проецируя (18) на прямоугольные декартовы оси координат (рис. 44), получаем дифференциальные уравнения движения центра масс:
где — координаты центра масс.
Из теоремы о движении центра масс можно получить следствия, аналогичные законам сохранения количества движения и проекции количества движения на ось.
1. Если главный вектор внешних сил, действующих на систему, равен нулю, т. е. , то из (18) следует, что ускорение центра масс равно нулю, а следовательно, скорость центра масс является постоянной по модулю и направлению, т. е. центр масс движется прямолинейно и равномерно по инерции или находится в покое. Если, в частности, в начальный момент он находится в покое, то он покоится в течение всего времени, пока главный вектор внешних сил равен нулю.
2. Если проекция, например на ось , главного вектора внешних сил, действующих на систему, равна нулю, т. е.
то из (18′) следует, что проекция ускорения центра масс на эту ось равна нулю, а следовательно, проекция скорости центра масс является постоянной величиной, т. е. .
Рис. 45
Если дополнительно в начальный момент , то тогда , т. е. координата центра масс не изменяется при движетении системы.
Внутренние силы не влияют явно на движение центра масс. Они могут влиять только неявно, через внешние силы. Следовательно, одними внутренними силами, без внешних, нельзя вывести из равновесия или изменить движение центра масс системы. Но внутренними силами для неизолированной механической системы можно создать движение отдельных частей системы и, следовательно, взаимодействие с внешними телами, вызывая этим внешние силы реакций связей или изменяя активные силы. Это может изменить движение центра масс или вывести его из равновесия.
Пусть человек стоит на абсолютно гладкой горизонтальной плоскости вблизи скрепленного с этой плоскостью тела. Так как на человека не действуют внешние силы в горизонтальном направлении, то внутренними силами он не может вывести из равновесия в этом направлении свой центр масс. Но человек может оттолкнуться рукой от препятствия, т. е. внутренними силами вызвать внешнюю силу реакций препятствия и таким образом вызвать движение своего центра масс в горизонтальном направлении. Все, что движется по Земле, летает в воздухе, плавает по воде, совершает это с помощью внутренних сил, создавая внешние силы трения на твердых поверхностях внешних тел, отталкиваясь от воздуха или воды.
Пример №2
Два груза с силами тяжести и , соединенные нерастяжимой нитью, переброшенной через блок, скользят по боковым граням равнобедренного клина (рис. 45). Клин стороной опирается на гладкую горизонтальную плоскость. В начальный момент система находится в покое.
Найти перемещение клина по плоскости при опускании груза на высоту . Сила тяжести клина и . Массой блока и нити пренебречь.
Решение:
Внешними силами, действующими на клин вместе с грузами, являются силы тяжести и нормальная реакция горизонтальной гладкой поверхности . Следовательно,
Учитывая, что в начальный момент система находится в покое, на основании второго следствия из теоремы о движении центра масс имеем .
Вычислим при и в момент, когда груз опустится на высоту .
Для момента
где и — соответственно координаты центра масс по оси грузов и и клина.
Пусть вся система вместе с клином переместилась в положительном направлении оси на величину при опускании груза на . Тогда
так как грузы вместе с клином передвинутся на вправо и по клину вдоль отрицательного направления оси на при заданном угле клина, равном .
Так как , то после вычитания получим
Так как величина оказалась положительной, то клин действительно перемещается вправо в положительном направлении оси .
Рис. 46
Пример №3
В электромоторе корпус (статор) имеет силу тяжести , а ротор . Ротор вращается по часовой стрелке с частотой (рис.46). Центр масс ротора вследствие его несимметричности отстоит от оси вращения на расстоянии .
Определить горизонтальную силу, с которой действует мотор на болты, крепящие его к фундаменту, и вертикальное давление на пол.
Решение:
Предположим, что при центр масс ротора находится на оси . Тогда в момент времени координаты центра масс ротора можно выразить как
где
Для определения давления мотора на болты и пол рассмотрим в качестве механической системы весь мотор, для которого внешней силой в горизонтальном направлении является только сила действия болтов , а в вертикальном направлении — силы тяжести и нормальная реакция пола . Для координат центра масс всего мотора
где и — массы корпуса мотора и ротора соответственно; , и , — координаты их центров масс.
Центр масс корпуса закрепленного мотора является неподвижной точкой и находится в начале координат. Следовательно, ,, и поэтому координаты центра масс всего мотора
Используя дифференциальные уравнения движения центра масс всего мотора в проекциях на координатные оси, получим
где —сила действия болтов на корпус мотора в горизонтальном направлении по оси ; —нормальная сила реакции пола. Так как
то из (а) следует
Сила действия мотора на болты и давление на пол равны
Наибольшие числовые значения этих сил
Если болтов нет, то корпус мотора может подпрыгивать в направлении оси . Динамическое условие подпрыгивания в рассматриваемом случае выразится как , кинематическое условие подпрыгивания мотора есть .
Дифференциальные уравнения поступательного движения твердого тела
Из теоремы о движении центра масс системы получаются дифференциальные уравнения поступательного движения твердого тела. Имеем
Но при поступательном движении твердого тела ускорения всех точек тела одинаковы по модулю и направлению, т. е. , где —ускорение произвольной точки тела. Учитывая это, из теоремы о движении центра масс получаем следующее дифференциальное уравнение поступательного движения тела в векторной форме:
Проецируя на оси координат, имеем:
Это и есть дифференциальные уравнения поступательного движения твердого тела в проекциях на прямоугольные оси координат. В этих уравнениях х, у, z являются координатами произвольной точки тела, в частности могут быть координатами его центра масс. Тело, совершающее поступательное движение, имеет три степени свободы, и поэтому можно составить три дифференциальных уравнения его движения.
Дифференциальные уравнения поступательного движения твердого тела аналогичны дифференциальным уравнениям движения одной материальной точки. С помощью этих уравнений можно решать такие же задачи, как и для одной точки.
| Рекомендую подробно изучить предмет: |
|
| Ещё лекции с примерами решения и объяснением: |
- Теорема об изменении кинетического момента
- Теорема об изменении кинетической энергии
- Потенциальное силовое поле
- Закон сохранения механической энергии
- Относительное движение материальной точки
- Геометрия масс
- Свойства внутренних сил системы
- Дифференциальное уравнение движения системы
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Количество движения
§1. Количество движения системы (импульс системы)
Количество движения (импульс тела) – векторная физическая величина, равная произведению массы тела на его скорость:
Импульс (количество движения) – одна из самых фундаментальных характеристик движения тела или системы тел.
Запишем II закон Ньютона в другой форме, учитывая, что ускорение Тогда следовательно
Произведение силы на время ее действия равно приращению импульса тела:
Где – импульс силы, который показывает, что результат действия силы зависит не только от ее значения, но и от продолжительности ее действия.
Количеством движения системы (импульсом) будем называть векторную величину , равную геометрической сумме (главному вектору) количеств движения (импульсов) всех точек системы (рис.2):
Из чертежа видно, что независимо от величин скоростей точек системы (если только эти скорости не параллельны) вектор может принимать любые значения и даже оказаться равным нулю, когда многоугольник, построенный из векторов
, замкнется. Следовательно, по величине нельзя полностью судить о характере движения системы.
Рис.2. Количество движения системы
§2. Теорема об изменении количества движения (импульса)
Пусть на тело массой m в течение некоторого малого промежутка времени Δt действовала сила Под действием этой силы скорость тела изменилась на Следовательно, в течение времени Δt тело двигалось с ускорением:
Из основного закона динамики (второго закона Ньютона) следует:
Следовательно, алгебраическое приращение количества движения материальной точки при прямолинейном движении за время ∆t равна импульсу действующей силы за тот же промежуток времени.
§3. Закон сохранения количества движения (закон сохранения импульса)
Из теоремы об изменении количества движения системы можно получить следующие важные следствия:
1) Пусть сумма всех внешних сил, действующих на замкнутую систему, равна нулю:
Тогда из уравнения следует, что Q==const. Таким образом, если сумма всех внешних сил, действующих на замкнутую систему, равна нулю, то вектор количества движения (импульса) системы будет постоянен по модулю и направлению.
2) Пусть внешние силы, действующие на систему, таковы, что сумма их проекций на какую-нибудь ось (например Оx) равна нулю:
Тогда из уравнения следует, что при этом Qx=const. Таким образом, если сумма проекций всех действующих внешних сил на какую-нибудь ось равна нулю, то проекция количества движения (импульса) системы на эту ось есть величина постоянная.
Эти результаты и выражают закон сохранения количества движения системы: при любом характере взаимодействия тел, образующих замкнутую систему, вектор полного импульса этой системы все время остается постоянным.
Из них следует, что внутренние силы изменить суммарное количество движения системы не могут.
Закон сохранения полного импульса изолированной системы – это универсальный закон природы. В более общем случае, когда система незамкнута, из следует, что полный импульс незамкнутой системы не остается постоянным. Его изменение за единицу времени равно геометрической сумме всех внешних сил.
Рассмотрим некоторые примеры:
а) Явление отдачи или отката. Если рассматривать винтовку и пулю как одну систему, то давление пороховых газов при выстреле будет силой внутренней. Эта сила не может изменить суммарное количество движения системы. Но так как пороховые газы, действуя на пулю, сообщают ей некоторое количество движения, направленное вперед, то они одновременно должны сообщить винтовке такое же количество движения в обратном направлении. Это вызовет движение винтовки назад, т.е. так называемую отдачу. Аналогичное явление получается при стрельбе из орудия (откат).
б) Работа гребного винта (пропеллера). Винт сообщает некоторой массе воздуха (или воды) движение вдоль оси винта, отбрасывая эту массу назад. Если рассматривать отбрасываемую массу и самолет (или судно) как одну систему, то силы взаимодействия винта и среды как внутренние не могут изменить суммарное количество движения этой системы. Поэтому при отбрасывании массы воздуха (воды) назад самолет (или судно) получает соответствующую скорость движения вперед, такую, что общее количество движения рассматриваемой системы останется равным нулю, так как оно было нулем до начала движения.
Аналогичный эффект достигается действием весел или гребных колес.
в) Реактивное движение. В реактивном снаряде (ракете) газообразные продукты горения топлива с большой скоростью выбрасываются из отверстия в хвостовой части ракеты (из сопла реактивного двигателя). Действующие при этом силы давления будут силами внутренними, и они не могут изменить суммарное количество движения системы ракета – продукты горения топлива. Но так как вырывающиеся газы имеют известное количество движения, направленное назад, то ракета получает при этом соответствующую скорость движения вперед.
Вопросы для самопроверки:
– Что называется количеством движения механической системы?
– Как формулируется теорема об изменении количества движения системы?
– Запишите математическое выражение теоремы об изменении количества движения механической системы в дифференциальной и интегральной форме.
– В каком случае количество движения механической системы не изменяется?
– Как определяется импульс переменной силы за конечный промежуток времени? Что характеризует импульс силы?
– Чему равны проекции импульса постоянной и переменной силы на оси координат?
– Чему равен импульс равнодействующей?
– Как изменяется количество движения точки, движущейся равномерно по окружности?
– Что называется количеством движения механической системы?
– Чему равно количество движения маховика, вращающегося вокруг неподвижной оси, проходящей через его центр тяжести?
– При каких условиях количество движения механической системы не изменяется? При каких условиях не изменяется его проекция на некоторую ось?
– Почему происходит откат орудия при выстреле?
– Могут ли внутренние силы изменить количество движения системы или количество движения ее части?
– От каких факторов зависит скорость свободного движения ракеты?
– Зависит ли конечная скорость ракеты от времени сгорания топлива?
Теоремы об изменении количества движения точки и системы
Количеством движения материальной точки называется векторная величина mV, равная произведению массы точки на вектор ее скорости. Вектор mV приложен к движущейся точке.
Количеством движения системы называют векторную величину Q, равную геометрической сумме (главному вектору) количеств движения всех точек системы:
Вектор Q является свободным вектором. В системе единиц СИ модуль количества движения измеряется в кг • м/с или Н • с.
Как правило, скорости всех точек системы различны (см., например, распределение скоростей точек катящегося колеса, показанное на рис. 6.21), и поэтому непосредственное суммирование векторов в правой части равенства (17.2) является затруднительным. Найдем формулу, с помощью которой величина Q вычисляется значительно легче. Из равенства (16.4) следует, что
Взяв от обеих частей производную по времени, получим Отсюда, учитывая равенство (17.2), находим, что
т. е. количество движения системы равно произведению массы всей системы на скорость ее центра масс.
Заметим, что вектор Q, подобно главному вектору сил в статике, является некоторой обобщенной векторной характеристикой движения всей механической системы. В общем случае движения системы ее количество движения Q можно рассматривать как характеристику поступательной части движения системы вместе с ее центром масс. Если при движении системы (тела) центр масс неподвижен, то количество движения системы будет равно нулю. Таково, например, количество движения тела, вращающегося вокруг неподвижной оси, проходящей через его центр масс.
Пример. Определить количество движения механической системы (рис. 17.1, а), состоящей из груза А массой тА — 2 кг, однородного блока В массой 1 кг и колеса D массой mD — 4 кг. Груз А движется со скоростью VA — 2 м/с, колесо D катится без скольжения, нить нерастяжима и невесома. Решение. Количество движения системы тел
Тело А движется поступательно и QA =mAVA (численно QA = 4 кг • м/с, направление вектора QA совпадает с направлением VA). Блок В совершает вращательное движение вокруг неподвижной оси, проходящей через его центр масс; следовательно, QB — 0. Колесо D совершает плоскопараллельное
движение; его мгновенный центр скоростей находится в точке К, поэтому скорость его центра масс (точки Е) равна VE = VA/2= 1 м/с. Количество движения колеса QD — mDVE — 4 кг • м/с; вектор QD направлен горизонтально влево.
Изобразив векторы QA и QD на рис. 17.1, б, находим количество движения Q системы по формуле (а). Учитывая направления и числовые значения величин, получим Q
кг • м/с, направление вектора Q показано на рис. 17.1, б.
Учитывая, что a -dV/dt, уравнение (13.4) основного закона динамики можно представить в виде
Уравнение (17.4) выражает теорему об изменении количества движения точки в дифференциальной форме: в каждый момент времени производная по времени от количества движения точки равна действующей на точку силе. (По существу это другая формулировка основного закона динамики, близкая к той, которую дал Ньютон.) Если на точку действует несколько сил, то в правой части равенства (17.4) будет равнодействующая сил, приложенных к материальной точке.
Если обе части равенства умножить на dt, то получим
Векторная величина, стоящая в правой части этого равенства, характеризует действие, оказываемое на тело силой за элементарный промежуток времени dt эту величину обозначают dS и называют элементарным импульсом силы, т. е.
Импульс S силы F за конечный промежуток времени /, — /0 определяется как предел интегральной суммы соответствующих элементарных импульсов, т. е.
В частном случае, если сила F постоянна по модулю и по направлению, то S = F(t| -/0) и S— F(tl — /0). В общем случае модуль импульса силы может быть вычислен по его проекциям на координатные оси:
Теперь, интегрируя обе части равенства (17.5) при т = const, получим
Уравнение (17.9) выражает теорему об изменении количества движения точки в конечной (интегральной) форме: изменение количества движения точки за некоторый промежуток времени равно импульсу действующей на точку силы (или импульсу равнодействующей всех приложенных к ней сил) за тот же промежуток времени.
При решении задач пользуются уравнениями этой теоремы в проекциях на координатные оси
Теперь рассмотрим механическую систему, состоящую из п материальных точек. Тогда для каждой точки можно применить теорему об изменении количества движения в форме (17.4), учитывая приложенные к точкам внешние и внутренние силы:
Суммируя эти равенства и учитывая, что сумма производных равна производной от суммы, получаем
Так как по свойству внутренних сил HFk =0 и по определению количества движения ^fnkV/c = Q, то окончательно находим
Уравнение (17.11) выражает теорему об изменении количества движения системы в дифференциальной форме: в каждый момент времени производная по времени от количества движения системы равна геометрической сумме всех внешних сил, действующих на систему.
Проецируя равенство (17.11) на координатные оси, получим
Умножая обе части (17.11) на dt и интегрируя, получим
где 0,, Q0 — количества движения системы в моменты времени соответственно и /0.
Уравнение (17.13) выражает теорему об изменении количества движения системы в интегральной форме: изменение количества движения системы за какое-либо время равно сумме импульсов всех внешних сил, действующих на систему за то же время.
В проекциях на координатные оси получим
Из теоремы об изменении количества движения системы можно получить следующие важные следствия, которые выражают закон сохранения количества движения системы.
- 1. Если геометрическая ^умма всех внешних сил, действующих на систему, равна нулю (LFk =0), то из уравнения (17.11) следует, что при этом Q = const, т. е. вектор количества движения системы будет постоянен по модулю и направлению.
- 2. Если внешние силы, действующие на систему, таковы, что сумма их проекций на какую-либо ось равна нулю (например, I e kx = 0), то из уравнений (17.12) следует, что при этом Qx = const, т. е. проекция количества движения системы на эту ось остается неизменной.
Отметим, что внутренние силы системы не участвуют в уравнении теоремы об изменении количества движения системы. Эти силы, хотя и влияют на количество движения отдельных точек системы, не могут изменить количество движения системы в целом. Учитывая это обстоятельство, при решении задач рассматриваемую систему целесообразно выбирать так, чтобы неизвестные силы (все или их часть) сделать внутренними.
Закон сохранения количества движения удобно применять в тех случаях, когда по изменению скорости одной части системы надо определить скорость другой ее части.
Задача 17.1. К тележке массой тх — 12 кг, движущейся по гладкой горизонтальной плоскости, в точке А с помощью цилиндрического шарнира прикреплен невесомый стержень AD длиной /= 0,6 м с грузом D массой т2 — 6 кг на конце (рис. 17.2). В момент времени /0 = 0, когда скорость тележки и <)— 0,5 м/с, стержень AD начинает вращаться вокруг оси А, перпендикулярной плоскости чертежа, по закону ф = (тг/6)(3^ 2 — 1) рад (/—в секундах). Определить: u=f[t) — закон изменения скорости тележки.
Решение. Рассмотрим механическую систему, состоящую из тележки и груза D, в произвольном положении (см. рис. 17.2). Отметим, что для удобства дальнейших расчетов в качестве произвольного положения системы изображается такое ее положение, при котором все координаты ее элементов (частей системы) будут положительными.
Изобразим действующи^ на_ систему_ внешние силы: силы тяжести Р|, Р2 и реакции плоскости N’, N” (сила Рх приложена в центре тяжести Сх тележки, который будем считать расположенным под точкой А). Сил трения нет, так как плоскость гладкая. Проведем связанные с неподвижной плоскостью координатные оси Оху так, чтобы ось х была горизонтальна.
Чтобы определить и, воспользуемся теоремой об изменении количества движения системы в проекциях на горизонтальную ось х:
Так как все внешние силы вертикальны, то 2F e kx =0. Следовательно, Qx — const. Обозначив через С значение этой постоянной величины, получим
Для рассматриваемой механической системы Q = Q Т +Q°, где Q т =т^и и Q D =m2VD — количества движения тележки и груза D соответственно (скорость й тележки и скорость VD груза определяются по отношению к неподвижной системе отсчета Оху).
Тогда из равенства (а) следует, что
Для определения VDx рассмотрим движение груза D как сложное, считая его движение по отношению к тележке относительным (это движение, совершаемое при вращении стержня ЛД вокруг оси А), а движение самой тележки — переносным. Тогда VD = Ve + Vr и
Но Ve = u и, следовательно, Vex= и. Вектор Vr направлен перпендикулярно стержню AD и численно равен Vr =koAD =Ар = Int. Изобразим этот вектор на рис. 17.2, считая величину ф положительной, и найдем Vtx — — — Vr cos ф. Окончательно равенство (в) примет вид
Подставив это выражение в равенство (б), получим
Отметим, что это равенство справедливо в любой момент времени. Постоянную интегрирования С определим по начальным условиям: при /0 = 0 и — и0. Подстановка этих значений в (д) дает С — (т <+ т2)и0, и тогда уравнение (д) примет вид
Отсюда находим зависимость скорости и тележки от времени
Подставив сюда значения соответствующих величин, находим искомую зависимость u—j м/с.
Ответ: и — [0,5 + 0,2n/cos(rc/ 2 /2 — п/6)].
§ 17.3. Теорема о движении центра масс
Теорему об изменении количества движения механической системы можно выразить еще в другой форме, носящей название теоремы о движении центра масс.
Подставив в уравнение (17.11) равенство Q =MVC, получим
Если масса М системы постоянна, то получим
где ас — ускорение центра масс системы.
Уравнение (17.15) и выражает теорему о движении центра масс системы: произведение массы системы на ускорение ее центра масс равно геометрической сумме всех внешних сил, действующих на систему.
Проецируя равенство (17.15) на координатные оси, получим
где xc, yc, zc — координаты центра масс системы.
Эти уравнения представляют собой дифференциальные уравнения движения центра масс в проекциях на оси декартовой системы координат.
Обсудим полученные результаты. Предварительно напомним, что центр масс системы является геометрической точкой, расположенной подчас вне геометрических границ тела. Действующие же на механическую систему силы (внешние и внутренние) приложены ко всем материальным точкам системы. Уравнения (17.15) дают возможность определить движение центра масс системы, не определяя движения отдельных ее точек. Сопоставив уравнения (17.15) теоремы о движении центра масс и уравнения (13.5) второго закона Ньютона для материальной точки, приходим к заключению: центр масс механической системы движется как материальная точка, масса которой равна массе всей системы, и как будто бы к этой точке приложены все внешние силы, действующие на систему. Таким образом, решения, которые получаем, рассматривая данное тело как материальную точку, определяют закон движения центра масс этого тела.
В частности, если тело движется поступательно, то кинематические характеристики всех точек тела и его центра масс одинаковы. Поэтому поступательно движущееся тело можно всегда рассматривать как материальную точку с массой, равной массе всего тела.
Как видно из (17.15), внутренние силы, действующие на точки системы, не оказывают влияния на движение центра масс системы. Внутренние силы могут оказать влияние на движение центра масс в тех случаях, когда под их воздействием меняются внешние силы. Примеры этого будут приведены далее.
Из теоремы о движении центра масс можно получить следующие важные следствия, которые выражают закон сохранения движения центра масс системы.
1. Если геометрическая сумма всех внешних сил, действующих на систему, равна нулю (LFk =0), то из уравнения (17.15) следует,
что при этом ас = 0 или Vc = const, т. е. центр масс этой системы
движется с постоянной по модулю и направлению скоростью (иначе, равномерно и прямолинейно). В частном случае, если вначале центр масс был в покое (Vc =0), то он и останется в покое; откуда
след ует, что его положение в пространстве не изменится, т. е. rc = const.
2. Если внешние силы, действующие на систему, таковы, что сумма их проекций на какую-нибудь ось (например, ось х) равна нулю (?F e kx = 0), то из уравнения (17.16) следует, что при этом хс =0 или VCx =хс = const, т. е. проекция скорости центра масс системы на эту ось есть величина постоянная. В частном случае, если в начальный момент Vex = 0, то и в любой последующий момент времени это значение сохранится, а отсюда следует, что координата хс центра масс системы не изменится, т. е. хс — const.
Рассмотрим примеры, иллюстрирующие закон движения центра масс.
Примеры. 1. Как было отмечено, движение центра масс зависит только от внешних сил, внутренними силами изменить положение центра масс нельзя. Но внутренние силы системы могут вызвать внешние воздействия. Так, движение человека по горизонтальной поверхности происходит под действием сил трения между подошвами его обуви и поверхностью дороги. Силой своих мышц (внутренние силы) человек ногами отталкивается от поверхности дороги, отчего в точках контакта с дорогой возникает сила трения (внешняя для человека), направленная в сторону его движения.
- 2. Аналогичным образом двигается автомобиль. Внутренние силы давления в его двигателе заставляют вращаться колеса, но так как последние имеют сцепление с дорогой, то возникающие силы трения «толкают» машину вперед (в результате колеса не вращаются, а двигаются плоскопараллельно). Если же дорога будет абсолютно гладкой, то центр масс автомобиля будет неподвижен (при нулевой начальной скорости) и колеса при отсутствии трения будут пробуксовывать, т. е. совершать вращательное движение.
- 3. Движение с помощью гребного винта, пропеллера, весел происходит за счет отбрасывания некоторой массы воздуха (или воды). Если рассматривать отбрасываемую массу и движущееся тело как одну систему, то силы взаимодействия между ними, как внутренние, не могут изменить суммарное количество движения этой системы. Однако каждая из частей этой системы будет двигаться, например, лодка вперед, а вода, которую отбрасывают весла, — назад.
- 4. В безвоздушном пространстве при движении ракеты «отбрасываемую массу» следует «брать с собой»: реактивный двигатель сообщает движение ракете за счет отброса назад продуктов горения топлива, которым заправлена ракета.
- 5. При спуске на парашюте можно управлять движением центра масс системы человек — парашют. Если мышечными усилиями человек подтягивает стропы парашюта так, что меняется форма его купола либо угол атаки воздушного потока, то это вызовет изменение и внешнего воздействия воздушного потока, а тем самым оказывается влияние на движение всей системы.
Задача 17.2. В задаче 17.1 (см. рис. 17.2) определить: 1) закон движения тележки х< = /)(/), если известно, что в начальный момент времени t0 = О система находилась в покое и координата х10 = 0; 2) ^акон изменения со временем суммарного значения нормальной реакции N(N = N’ + N”) горизонтальной плоскости, т. е. N=f2(t).
Решение. Здесь, как и в задаче 17.1, рассмотрим систему, состоящую из тележки и груза D, в произвольном положении под действием приложенных к ней внешних сил (см. рис. 17.2). Координатные оси Оху проведем так, чтобы ось х была горизонтальна, а ось у проходила через точку А0, т. е. место расположения точки А в момент времени t—t0 — 0.
1. Определение закона движения тележки. Для определения х, = /,(0 воспользуемся теоремой о движении центра масс системы. Составим дифференциальное уравнение его движения в проекции на ось х:
Так как все внешние силы вертикальны, то T,F e kx = 0, и, следовательно,
Проинтегрировав это уравнение, найдем, что Мхс = В, т. е. проекция скорости центра масс системы на ось х есть величина постоянная. Так как в начальный момент времени
Интегрируя уравнение Мхс = 0, получим
т. е. координата хс центра масс системы постоянна.
Запишем выражение Мхс для произвольного положения системы (см. рис. 17.2), приняв во внимание, что хА — х<, xD — х2 и х2 — х< — I sin ф. В соответствии с формулой (16.5), определяющей координату центра масс системы, в данном случае Мхс — т<х< + т2х2‘.
для произвольного момента времени
В соответствии с равенством (б) координата хс центра масс всей системы остается неизменной, т. е. хД^,) = xc(t). Следовательно, приравняв выражения (в) и (г), получим зависимость координаты х, от времени.
О т в е т: Х — 0,2[0,5 + sin(n/ 2 /2 — 7т/6)] м, где t — в секундах.
2. Определение реакции N. Для определения N=f2(t) составим дифференциальное уравнение движения центра масс системы в проекции на вертикальную ось у (см. рис. 17.2):
Отсюда, обозначив N= N + N”, получим
1 cos Ф» получим
Продифференцировав это равенство два раза по времени (учитывая при этом, что уС1 и уА величины постоянные и, следовательно, их производные равны нулю), найдем
Подставив это выражение в уравнение (е), определим искомую зависимость N от t.
где ф = (я/6)(3/ —1), t — в секундах, N— в ньютонах.
Задача 17.3. Электрический мотор массой тх прикреплен на горизонтальной поверхности фундамента болтами (рис. 17.3). На валу мотора под прямым углом к оси вращения закреплен одним концом невесомый стержень длиной /, на другом конце стержня насажен точечный груз А массой т2. Вал вращается равномерно с угловой скоростью со. Найти горизонтальное давление мотора на болты. Решение. Рассмотрим механическую систему, состоящую из мотора и точечного груза А, в произвольном положении. Изобразим действующие на систему внешние силы: силы тяжести Рх, Р2, реакцию фундамента в виде вертикальной силы N и горизонтальной силы R. Проведем координатную ось х горизонтально.
Чтобы определить горизонтальное давление мотора на болты (а оно будет численно равно реакции R и направлено противоположно вектору R), составим уравнение теоремы об изменении количества движения системы в проекции на горизонтальную ось х:
Для рассматриваемой системы в ее произвольном положении, учитывая, что количество движения корпуса мотора равно нулю, получим Qx = — т2УАсощ. Принимая во внимание, что VA = aз/, ф = со/ (вращение мотора равномерное), получим Qx — — m2co/cos со/. Дифференцируя Qx по времени и подставляя в равенство (а), найдем R— m2co 2 /sin со/.
Заметим, что именно такие силы являются вынуждающими (см. § 14.3), при их воздействии возникают вынужденные колебания конструкций.
Упражнения для самостоятельной работы
- 1. Что называют количеством движения точки и механической системы?
- 2. Как изменяется количество движения точки, равномерно движущейся по окружности?
- 3. Что характеризует импульс силы?
- 4. Влияют ли внутренние силы системы на ее количество движения? На движение ее центра масс?
- 5. Как влияют на движение центра масс системы приложенные к ней пары сил?
- 6. При каких условиях центр масс системы находится в покое? движется равномерно и прямолинейно?
7. В неподвижной лодке при отсутствии течения воды на корме сидит взрослый человек, а на носу лодки — ребенок. В каком направлении переместится лодка, если они поменяются местами?
В каком случае модуль перемещения лодки будет большим: 1) если ребенок перейдет к взрослому на корму; 2) если взрослый перейдет к ребенку на нос лодки? Каковы будут при этих движениях перемещения центра масс системы «лодка и два человека»?
[spoiler title=”источники:”]
https://www.sites.google.com/site/tehmehprimizt/lekcii/teoreticeskaa-mehanika/dinamika/kpd-kolicestvo-dvizenia
https://studref.com/496086/matematika_himiya_fizik/teoremy_izmenenii_kolichestva_dvizheniya_tochki_sistemy
[/spoiler]