| Момент инерции | |
|---|---|
 |
|
| Размерность | L2M |
| Единицы измерения | |
| СИ | кг·м² |
| СГС | г·см² |
Моме́нт ине́рции — тензорная физическая величина, мера инертности во вращательном движении вокруг оси, подобно тому, как масса тела является мерой его инертности в поступательном движении. Характеризуется распределением масс в теле. Момент инерции равен сумме произведений элементарных масс на квадрат их расстояний до базового множества, которое, формально, может представлять собой не обязательно ось вращения (т.е. прямую), но и точку или плоскость. В последних случаях говорят о моменте инерции относительно точки или плоскости, а возникать такие величины могут в формальных вычислениях, например, при расчете тензора инерции.
Единица измерения в Международной системе единиц (СИ): кг·м².
Обозначение: I или J.
Различают несколько моментов инерции — в зависимости от типа базового множества до которого отсчитываются расстояния от элементарных масс.
Осевой момент инерции[править | править код]

Осевые моменты инерции некоторых тел
Моментом инерции механической системы относительно неподвижной оси («осевой момент инерции») называется величина Ja, равная сумме произведений масс всех n материальных точек системы на квадраты их расстояний до оси[1]:

где:
- mi — масса i-й точки,
- ri — расстояние от i-й точки до оси.
Осевой момент инерции тела Ja является мерой инертности тела во вращательном движении вокруг оси подобно тому, как масса тела является мерой его инертности в поступательном движении.

где:
- dm = ρ dV — масса малого элемента объёма тела dV,
- ρ — плотность,
- r — расстояние от элемента dV до оси a.
Если тело однородно, то есть его плотность всюду одинакова, то

Теорема Гюйгенса — Штейнера[править | править код]
Момент инерции твёрдого тела относительно какой-либо оси зависит от массы, формы и размеров тела, а также и от положения тела по отношению к этой оси. Согласно теореме Гюйгенса — Штейнера, момент инерции тела J относительно произвольной оси равен сумме момента инерции этого тела Jc относительно оси, проходящей через центр масс тела параллельно рассматриваемой оси, и произведения массы тела m на квадрат расстояния d между осями[1]:

где m — полная масса тела.
Например, момент инерции стержня относительно оси, проходящей через его конец, равен:

Осевые моменты инерции некоторых тел[править | править код]
| Тело | Описание | Положение оси a | Момент инерции Ja |
|---|---|---|---|
| Материальная точка массы m | На расстоянии r от точки, неподвижная | 
|
|

|
Полый тонкостенный цилиндр или кольцо радиуса r и массы m | Ось цилиндра |
|

|
Сплошной цилиндр или диск радиуса r и массы m | Ось цилиндра | 
|
|
Полый толстостенный цилиндр массы m с внешним радиусом r2 и внутренним радиусом r1 | Ось цилиндра |  [Комм 1] [Комм 1]
|
|
Сплошной цилиндр длины l, радиуса r и массы m | Ось перпендикулярна образующей цилиндра и проходит через его центр масс | 
|
|
Полый тонкостенный цилиндр (кольцо) длины l, радиуса r и массы m | Ось перпендикулярна к цилиндру и проходит через его центр масс | 
|
|
Прямой тонкий стержень длины l и массы m | Ось перпендикулярна к стержню и проходит через его центр масс | 
|

|
Прямой тонкий стержень длины l и массы m | Ось перпендикулярна к стержню и проходит через его конец | 
|

|
Тонкостенная сфера радиуса r и массы m | Ось проходит через центр сферы | 
|

|
Шар радиуса r и массы m | Ось проходит через центр шара | 
|

|
Конус радиуса r и массы m | Ось конуса | 
|
| Равнобедренный треугольник с высотой h, основанием a и массой m | Ось перпендикулярна плоскости треугольника и проходит через вершину (при высоте) | 
|
|
| Правильный треугольник со стороной a и массой m | Ось перпендикулярна плоскости треугольника и проходит через центр масс | 
|
|
| Квадрат со стороной a и массой m | Ось перпендикулярна плоскости квадрата и проходит через центр масс | 
|
|
| Прямоугольник со сторонами a и b и массой m | Ось перпендикулярна плоскости прямоугольника и проходит через центр масс | 
|
|
| Правильный n-угольник радиуса r и массой m | Ось перпендикулярна плоскости и проходит через центр масс | ![{displaystyle {frac {mr^{2}}{6}}left[1+2cos(pi /n)^{2}right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6bf60937eb16b822e5b6212250fa8f13c794f3cb)
|
|

|
Тор (полый) с радиусом направляющей окружности R, радиусом образующей окружности r и массой m | Ось перпендикулярна плоскости направляющей окружности тора и проходит через центр масс | 
|
Вывод формул[править | править код]
Тонкостенный цилиндр (кольцо, обруч)
Вывод формулы
Момент инерции тела равен сумме моментов инерции составляющих его частей. Разобьём тонкостенный цилиндр на элементы с массой dm и моментами инерции dJi. Тогда

Поскольку все элементы тонкостенного цилиндра находятся на одинаковом расстоянии от оси вращения, формула (1) преобразуется к виду

Толстостенный цилиндр (кольцо, обруч)
Вывод формулы
Пусть имеется однородное кольцо с внешним радиусом R, внутренним радиусом R1, толщиной h и плотностью ρ. Разобьём его на тонкие кольца толщиной dr. Масса и момент инерции тонкого кольца радиуса r составит

Момент инерции толстого кольца найдём как интеграл


Поскольку объём и масса кольца равны

получаем окончательную формулу для момента инерции кольца

Однородный диск (сплошной цилиндр)
Вывод формулы
Рассматривая цилиндр (диск) как кольцо с нулевым внутренним радиусом (R1 = 0), получим формулу для момента инерции цилиндра (диска):

Сплошной конус
Вывод формулы
Разобьём конус на тонкие диски толщиной dh, перпендикулярные оси конуса. Радиус такого диска равен

где R – радиус основания конуса, H – высота конуса, h – расстояние от вершины конуса до диска.
Масса и момент инерции такого диска составят


Интегрируя, получим

Сплошной однородный шар
Вывод формулы
Разобьём шар на тонкие диски толщиной dh, перпендикулярные оси вращения. Радиус такого диска, расположенного на высоте h от центра сферы, найдём по формуле

Масса и момент инерции такого диска составят

Момент инерции шара найдём интегрированием:

Тонкостенная сфера
Вывод формулы
Для вывода воспользуемся формулой момента инерции однородного шара радиуса R:

Вычислим, насколько изменится момент инерции шара, если при неизменной плотности ρ его радиус увеличится на бесконечно малую величину dR.

Тонкий стержень (ось проходит через центр)
Вывод формулы
Разобьём стержень на малые фрагменты длиной dr. Масса и момент инерции такого фрагмента равна

Интегрируя, получим

Тонкий стержень (ось проходит через конец)
Вывод формулы
При перемещении оси вращения из середины стержня на его конец, центр тяжести стержня перемещается относительно оси на расстояние l⁄2. По теореме Штейнера новый момент инерции будет равен

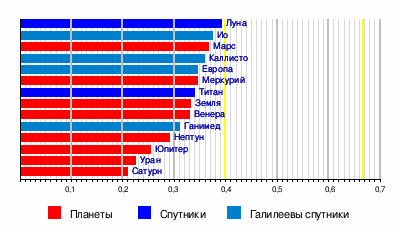
Безразмерные моменты инерции планет и их спутников[2][3][4]
Безразмерные моменты инерции планет и спутников[править | править код]
Большое значение для исследований внутренней структуры планет и их спутников имеют их безразмерные моменты инерции. Безразмерный момент инерции тела радиуса r и массы m равен отношению его момента инерции относительно оси вращения к моменту инерции материальной точки той же массы относительно неподвижной оси вращения, расположенной на расстоянии r (равному mr2). Эта величина отражает распределение массы по глубине. Одним из методов её измерения у планет и спутников является определение доплеровского смещения радиосигнала, передаваемого АМС, пролетающей около данной планеты или спутника. Для тонкостенной сферы безразмерный момент инерции равен 2/3 (~0,67), для однородного шара — 0,4, и вообще тем меньше, чем большая масса тела сосредоточена у его центра. Например, у Луны безразмерный момент инерции близок к 0,4 (равен 0,391), поэтому предполагают, что она относительно однородна, её плотность с глубиной меняется мало. Безразмерный момент инерции Земли меньше, чем у однородного шара (равен 0,335), что является аргументом в пользу существования у неё плотного ядра[5][6].
Центробежный момент инерции[править | править код]
Центробежными моментами инерции тела по отношению к осям прямоугольной декартовой системы координат называются следующие величины[1][7]:



где x, y и z — координаты малого элемента тела объёмом dV, плотностью ρ и массой dm.
Ось OX называется главной осью инерции тела, если центробежные моменты инерции Jxy и Jxz одновременно равны нулю. Через каждую точку тела можно провести три главные оси инерции. Эти оси взаимно перпендикулярны друг другу. Моменты инерции тела относительно трёх главных осей инерции, проведённых в произвольной точке O тела, называются главными моментами инерции данного тела[7].
Главные оси инерции, проходящие через центр масс тела, называются главными центральными осями инерции тела, а моменты инерции относительно этих осей — его главными центральными моментами инерции. Ось симметрии однородного тела всегда является одной из его главных центральных осей инерции[7].
Геометрические моменты инерции[править | править код]
Геометрический момент инерции объёма относительно оси — геометрическая характеристика тела, выражаемая формулой[8]:

где, как и ранее r — расстояние от элемента dV до оси a.
Размерность JVa — длина в пятой степени ( ), соответственно единица измерения СИ — м5.
), соответственно единица измерения СИ — м5.
Геометрический момент инерции площади относительно оси — геометрическая характеристика тела, выражаемая формулой[8]:

где интегрирование выполняется по поверхности S, а dS — элемент этой поверхности.
Размерность JSa — длина в четвёртой степени ( ), соответственно единица измерения СИ — м4. В строительных расчетах, литературе и сортаментах металлопроката часто указывается в см4.
), соответственно единица измерения СИ — м4. В строительных расчетах, литературе и сортаментах металлопроката часто указывается в см4.
Через геометрический момент инерции площади выражается момент сопротивления сечения:

Здесь rmax — максимальное расстояние от поверхности до оси.
| Геометрические моменты инерции площади некоторых фигур | |
|---|---|
Прямоугольника высотой  и шириной и шириной  : :
|

|
Прямоугольного коробчатого сечения высотой и шириной по внешним контурам  и и  , а по внутренним и соответственно , а по внутренним и соответственно
|

|
Круга диаметром 
|

|


Момент инерции относительно плоскости[править | править код]
Моментом инерции твёрдого тела относительно некоторой плоскости называют скалярную величину, равную сумме произведений массы каждой точки тела на квадрат расстояния от этой точки до рассматриваемой плоскости[9].
Если через произвольную точку  провести координатные оси
провести координатные оси  , то моменты инерции относительно координатных плоскостей
, то моменты инерции относительно координатных плоскостей  ,
,  и
и  будут выражаться формулами:
будут выражаться формулами:



В случае сплошного тела суммирование заменяется интегрированием.
Центральный момент инерции[править | править код]
Центральный момент инерции (момент инерции относительно точки O, момент инерции относительно полюса, полярный момент инерции)  — это величина, определяемая выражением[9]:
— это величина, определяемая выражением[9]:
где:
Центральный момент инерции можно выразить через главные осевые моменты инерции, а также через моменты инерции относительно плоскостей[9]:


Тензор инерции и эллипсоид инерции[править | править код]
Момент инерции тела относительно произвольной оси, проходящей через центр масс и имеющей направление, заданное единичным вектором  , можно представить в виде квадратичной (билинейной) формы:
, можно представить в виде квадратичной (билинейной) формы:
 (1)
(1)

где  — тензор инерции. Матрица тензора инерции симметрична, имеет размеры
— тензор инерции. Матрица тензора инерции симметрична, имеет размеры  и состоит из компонент центробежных моментов:
и состоит из компонент центробежных моментов:



Выбором соответствующей системы координат матрица тензора инерции может быть приведена к диагональному виду. Для этого нужно решить задачу о собственных значениях для матрицы тензора :


где  — ортогональная матрица перехода в собственный базис тензора инерции. В собственном базисе координатные оси направлены вдоль главных осей тензора инерции, а также совпадают с главными полуосями эллипсоида тензора инерции. Величины
— ортогональная матрица перехода в собственный базис тензора инерции. В собственном базисе координатные оси направлены вдоль главных осей тензора инерции, а также совпадают с главными полуосями эллипсоида тензора инерции. Величины  — главные моменты инерции. Выражение (1) в собственной системе координат имеет вид:
— главные моменты инерции. Выражение (1) в собственной системе координат имеет вид:

откуда получается уравнение эллипсоида в собственных координатах. Разделив обе части уравнения на 

и произведя замены:

получаем канонический вид уравнения эллипсоида в координатах  :
:

Расстояние от центра эллипсоида до некоторой его точки связано со значением момента инерции тела вдоль прямой, проходящей через центр эллипсоида и эту точку:

См. также[править | править код]
- Кинематика твёрдого тела
- Метод главных компонент
- Сопротивление материалов
- Теорема Штейнера
- Теорема Кёнига (механика)
- Механические приложения тройного интеграла
- Механические приложения двойного интеграла
- Полярный момент инерции
- Список моментов инерции
- Момент силы
- Момент импульса
Комментарии[править | править код]
- ↑ При получении этой формулы путём вычитания момента инерции сплошного цилиндра радиусом r1 из цилиндра радиусом r2 необходимо обратить внимание, что их массы при этом не будут одинаковыми или равны m. При этом должно выполняться условие . Из формулы для массы соответствующего цилиндра можно определить, что в этом случае и . В правильности использования знака «+» в этой формуле также можно убедиться, если сравнить моменты инерции полого толстостенного и сплошного цилиндров с одинаковыми массами. Действительно, у первого из этих цилиндров масса в среднем сосредоточена дальше от оси, чем у второго, поэтому и момент инерции этого цилиндра должен быть больше, чем у сплошного. Именно такое соотношение моментов инерции и обеспечивает знак «+». С другой стороны, в пределе при стремлении r1 к r2 формула для полого толстостенного цилиндра должна приобрести тот же вид, что и формула для полого тонкостенного цилиндра. Очевидно, что такой переход происходит только при использовании формулы со знаком «+».



Примечания[править | править код]
- ↑ 1 2 3 Тарг С. М. Момент инерции // Физическая энциклопедия / Гл. ред. А. М. Прохоров. — М.: Большая Российская энциклопедия, 1992. — Т. 3. — С. 206—207. — 672 с. — 48 000 экз. — ISBN 5-85270-019-3.
- ↑ Planetary Fact Sheet. Дата обращения: 31 августа 2010. Архивировано 14 марта 2016 года.
- ↑ Showman, Adam P.; Malhotra, Renu. The Galilean Satellites (англ.) // Science. — 1999. — Vol. 286, no. 5437. — P. 77—84. — doi:10.1126/science.286.5437.77. — PMID 10506564.
- ↑ Margot, Jean-Luc; et al. Mercury’s moment of inertia from spin and gravity data (англ.) // Journal of Geophysical Research (англ.) (рус. : journal. — 2012. — Vol. 117. — doi:10.1029/2012JE004161.
- ↑ Галкин И.Н. Внеземная сейсмология. — М.: Наука, 1988. — С. 42-73. — 195 с. — (Планета Земля и Вселенная). — 15 000 экз. — ISBN 502005951X.
- ↑ Пантелеев В. Л. Физика Земли и планет. Гл. 3.4 — Гравитационное поле планеты. Дата обращения: 31 августа 2010. Архивировано 3 октября 2013 года.
- ↑ 1 2 3 Тарг С. М. Краткий курс теоретической механики. — М.: «Высшая школа», 1995. — С. 269—271. — 416 с. — ISBN 5-06-003117-9.
- ↑ 1 2 Бухгольц Н. Н. Основной курс теоретической механики. — 4-е изд. — М.: «Наука», 1966. — Т. 2. — С. 131.
- ↑ 1 2 3 Яблонский А. А. Динамика // Курс теоретической механики. — 3-е изд. — М.: «Высшая школа», 1966. — Т. II. — С. 102—103. — 411 с.
Литература[править | править код]
- Матвеев. А. Н. Механика и теория относительности. М.: Высшая школа, 1986. (3-е изд. М.: ОНИКС 21 век: Мир и Образование, 2003. — 432с.)
- Трофимова Т. И. Курс физики. — 7-е изд. — М.: Высшая школа, 2001. — 542 с.
- Алешкевич В. А., Деденко Л. Г., Караваев В. А. Механика твердого тела. Лекции. Архивная копия от 7 января 2014 на Wayback Machine Издательство Физического факультета МГУ, 1997.
- Павленко Ю. Г. Лекции по теоретической механике. М.: ФИЗМАТЛИТ, 2002. — 392с.
- Яворский Б. М., Детлаф А. А. Физика для школьников старших классов и поступающих в вузы: учебное пособие — М.: Дрофа, 2002, 800с. ISBN 5-7107-5956-3
- Сивухин Д. В. Общий курс физики. В 5 т. Том I. Механика. 4-е изд. М.: ФИЗМАТЛИТ; Изд-во МФТИ, 2005. — 560 с.
- Беляев Н. М. Сопротивление материалов. Главная редакция физико-математической литературы изд-ва «Наука», 1976. — 608 с.
Ссылки[править | править код]
- Определение момента инерции тел простой формы.
-
Момент инерции полого цилиндра (кольца).
Определим момент
инерции полого цилиндра, вращающегося
вокруг оси симметрии, используя общую
формулу (13) для определения момента
инерции
|
|
(13) |
Через
R1
обозначим внутренний радиус кольца
высотой h,
а через R2
– внешний (рис.2).Объём кольца определится
через разность площадей оснований S1
и S2
![]()
а
масса кольца
|
|
(14) |
Разобьём
кольцо на кольца бесконечно малой
толщины dri.
Выделим
колечко, отстоящее от оси вращения на
расстоянии ri.
Объём этого колечка равен:
|
|
(15) |
Подставим
dVi
в формулу (13)
 и
и
проинтегрируем.
|
Момент |
(16) |
Перепишем
формулу (16) в виде
![]() и, учитывая выражение (14) получим момент
и, учитывая выражение (14) получим момент
инерции кольца
|
|
(17) |

 рис.2
рис.2
-
Описание установки.
Маятник Максвелла
FPM–03 предназначен для
исследования закона сохранения энергии
и определения на этом основании момента
инерции колец.
Общий вид
маятника Максвелла FPM–03
показан на рис.3. Основание 1 оснащено
регулируемыми ножками 2, которые позволяют
произвести выравнивание прибора. В
основании закреплена колонка 3, к которой
прикреплен неподвижный верхний кронштейн
4 и подвижный нижний кронштейн 5. На
верхнем кронштейне находится электромагнит
6, фотоэлектрический датчик №1–7 и
вороток 8 для закрепления и регулирования
длины бифилярной подвески маятника.
Нижний кронштейн
вместе с прикрепленным к нему
фтоэлектрическим датчиком №2 – 9 можно
перемещать вдоль колонки и фиксировать
в произвольно избранном положении.
Маятник 10 прибора
FPM–03 – это ролик,
закрепленный на оси и завешенный по
бифилярному способу, на который
накладываются заменные кольца 11,
изменяющие таким образом момент инерции
системы.
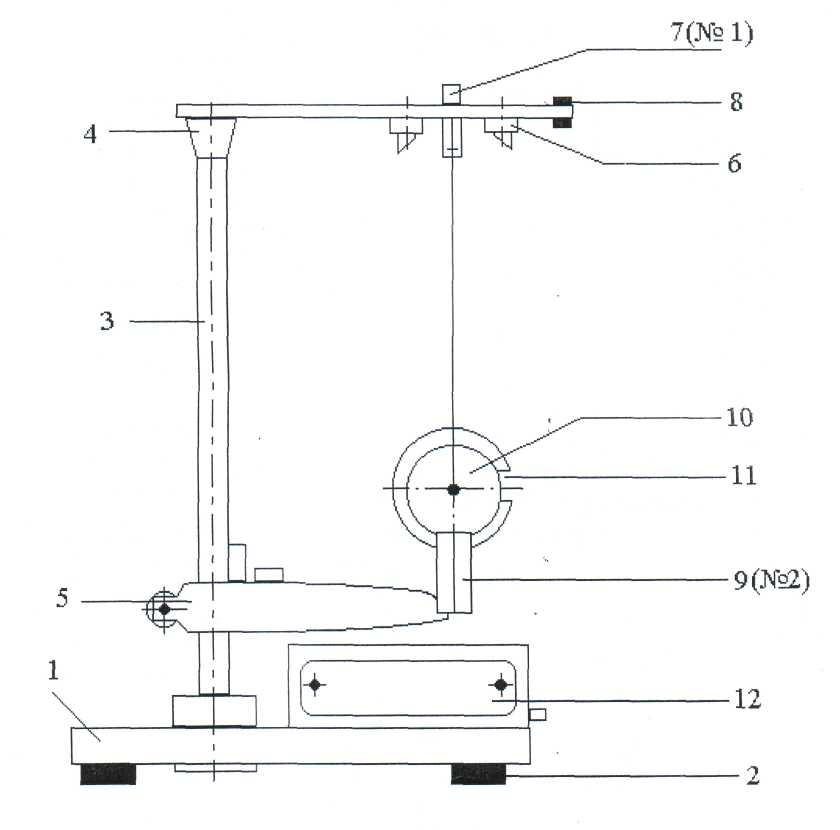
Рис.3. Общий вид маятника
МаксвеллаFPM– 03.
Маятник с
наложенным кольцом удерживается в
верхнем положении электромагнитом.
Длина маятника определяется по
миллиметровой шкале на колонке прибора.
Время движения
маятника фиксируется миллисекундомером.
На лицевой панели миллисекундомера
находятся следующие манипуляционные
элементы:
/сеть/ –
выключатель сети. Нажатие этой клавиши
включает напряжение питания. Визуально
объявляется это свечением цифровых
индикаторов (высвечивающих цифру ноль)
и свечением лампочек фотоэлектрических
датчиков.
/сброс/ –
установка ноля измерителя. Нажатие
клавиши вызывает сброс схем миллисекундомера
FPM– 15.
/пуск/ – управление
электромагнитом. Нажатие этой клавиши
обозначает освобождение электромагнита
и генерирование в схеме миллисекундомера
импульса разрешения на измерение.
На задней стенке
миллисекундомера находятся зажим
заземления.
-
Теория метода.
Метод основан
на выполнении фундаментального закона
сохранения энергии–механическая
энергия замкнутой консервативной
системы при движении системы не меняется.
Когда маятник Максвелла (основные
элементы: ось, ролик и кольца) находятся
на высоте hс нитью,
намотанной на ось, вся система обладает
потенциальной энергией
|
|
(18) |
Затем маятник,
вращаясь, опускается и потенциальная
энергия уменьшаясь переходит в
кинетическую. Кинетическая энергия
системы будет состоять из кинетической
энергии поступательного и вращательного
движения.
Кинетическая
энергия поступательного движения
![]() ,
,
где![]() – конечная скорость системы.
– конечная скорость системы.
При
равноускоренном движении с нулевой
начальной скоростью конечная скорость
определится по формуле:
![]() ,
,
т.к.
![]() ,
,![]() ,
,![]() .
.
Тогда кинетическая
энергия поступательного движения будет
равна:
|
|
(19) |
Кинетическая
энергия вращательного движения равна:
|
|
(20) |
т.к.
![]()
Подставляя
формулы (19) и (20) в формулу, выражающую
закон сохранения энергии всей системы
![]() .
.
После преобразования
получим рабочую формулу для определения
момента инерции
|
|
(21) |
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Знание момента инерции тела позволяет воспользоваться законом сохранения момента импульса либо выражением для описания кругового движения с угловым ускорением. В данной статье рассмотрим, как находить для цилиндра момент инерции при различном положении осей вращения.
Момент инерции: математическое определение
Осевой момент инерции вводится в физику благодаря изучению законов вращательного движения тел. Для точки материальной с массой m, вращающейся на расстоянии r от оси, момент инерции будет равен:
I = m*r2
В общем же случае для тела, которое имеет произвольное распределение вещества в пространстве (любую геометрическую форму), величину I можно вычислить так:
I = ∫r2dm
По сути, это выражение является обобщением предыдущего. В нем производится суммирование (интегрирование) моментов от каждой элементарной частицы dm, дистанция до оси от которой равна r.
Если говорить о физическом значении рассматриваемой величины I, то она показывает, насколько “сильно” система сопротивляется воздействию внешнего момента силы, который пытается ее раскрутить или, наоборот, остановить.
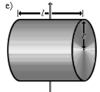
Момент инерции цилиндра относительно оси, его основаниям перпендикулярной
Из приведенной выше формулы можно понять, что величина I является характеристикой всей вращающейся системы, то есть она зависит как от формы тела и распределения в нем массы, так и от относительного положения оси.
В данном пункте рассмотрим простой случай: определить необходимо момент инерции для сплошного цилиндра, ось вращения которого перпендикулярна его основаниям и проходит через гравитационный центр фигуры.
Для решения проблемы применим интегральную формулу для I. В процессе операции интегрирования мысленно разобьем цилиндр на тонкие колечки толщиной dr. Каждое колечко будет иметь объем: dV = 2*pi*r*dr*h, здесь h – высота фигуры. Учитывая, что dm = ρ*dV, где ρ – плотность цилиндра, получаем:
I = ∫r2dm = ρ*∫r2dV = 2*pi*ρ*h*∫r3dr
Этот интеграл необходимо вычислить для пределов от 0 до R, где R – радиус фигуры. Тогда получим:
I = 2*pi*ρ*h*∫R0r3dr = 2*pi*ρ*h/4*(r4)∣R0 = pi*ρ*h*R4/2
Воспользовавшись формулой для массы цилиндра через его объем и плотность, приходим к конечному выражению:
I = m*R2/2, где m = pi*ρ*h*R2
Мы получили формулу инерции момента цилиндра однородного. Она показывает, что величина I для этой фигуры в 2 раза меньше, чем для материальной точки аналогичной массы, которая вращается на расстоянии радиуса цилиндра от оси.
Момент инерции полого цилиндра
Теперь оставим ось на том же месте и найдем значение I для цилиндра с пустотой внутри (втулка, труба). Такую фигуру описывают двумя радиусами: внешним R1 и внутренним R2. В этом случае для интегрирования применяется абсолютно тот же подход, что и для сплошного цилиндра, только пределы теперь изменяются от R2 до R1. Имеем:
I = 2*pi*ρ*h/4*(r4)∣R1R2 = pi*ρ*h*R4/2∣R1R2 = pi*ρ*h/2*(R14-R24)
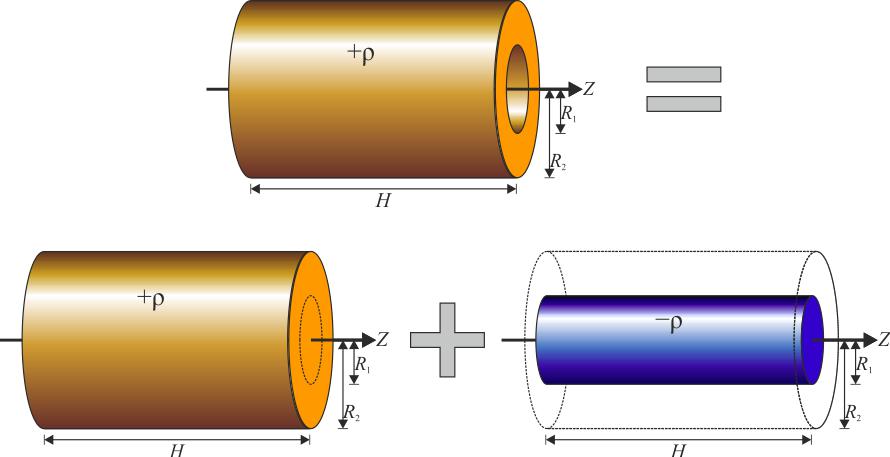
Для дальнейшего упрощения этой формулы воспользуемся разложением на множители выражения в скобках, получим:
I = pi*ρ*h*(R12-R22)*(R12+R22)/2
Часть этого выражения вместе с первыми скобками является массой полого цилиндра, поэтому получаем конечную формулу:
I = m*(R12+R22)/2
Отсюда видно, что момент инерции полого цилиндра больше этого значения для сплошного цилиндра аналогичной массы и такого же внешнего радиуса на величину m*R22/2. Этот результат не вызывает удивления, поскольку в полом цилиндре центр масс находится от оси вращения дальше, чем в сплошном.

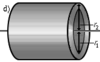
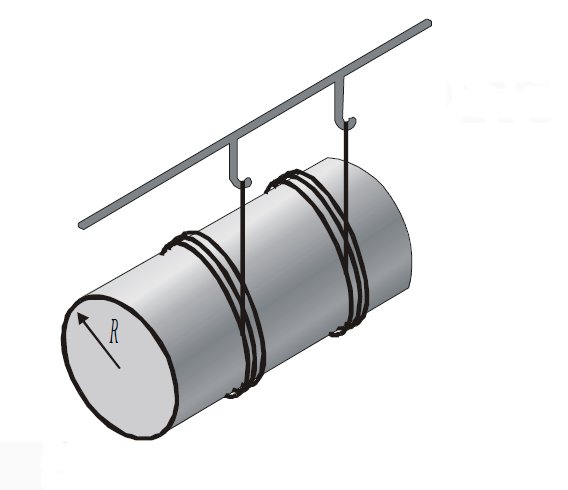
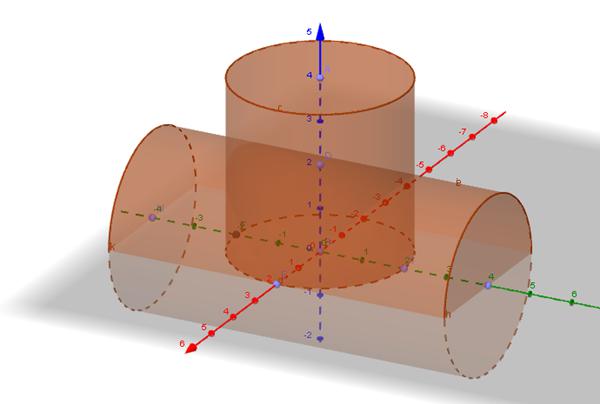
Величина I для цилиндра, ось вращения которого проходит параллельно плоскостям его основания
В такой системе ось вращения проходит также через центр массы цилиндра, но теперь он лежит как бы на боку (на цилиндрической поверхности, см. рис. ниже).
Расчет для момента инерции цилиндра для такой ситуации является непростой задачей, поскольку требует наличия дополнительных знаний для ее решения. Тем не менее приведем необходимые математические выкладки, чтобы читатели имели более полное представление о проведении интегрирования при вычислении I.
Начинаем решать задачу. Разбиваем сплошной цилиндр на отдельные диски бесконечно малой толщины. Чтобы узнать, каким моментом инерции обладает этот диск относительно оси, которая проходит через него и параллельна его основаниям, необходимо выполнить отдельное интегрирование. Оно дает следующий результат:
Ii = R2*dm/4
Чтобы найти, величину Ii для этого диска относительно уже новой оси, которая рассматривается в задаче, необходимо воспользоваться теоремой Штейнера. Получим:
Ii = R2*dm/4 + L2*dm, здесь L – расстояние от оси до тонкого диска.
Зная, что dm = pi*R2*dL*ρ, подставляем в интегральную формулу для I и проводим интегрирование по пределам (-L0/2; +L0/2), имеем:
I = ∫mIi = ∫m(R2*dm/4 + L2*dm) = pi*R2*ρ*∫L0/2-L0/2(R2*dL/4 + L2*dL)
Решение этого интеграла приводит к конечной формуле:
I = m*(R2/4 + L02/12)
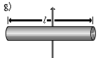
Пример решения задачи
Решим интересную задачу на нахождение осевого момента инерции цилиндра. Пусть он лежит на цилиндрической поверхности, а ось вращения расположена параллельно его основанию и проходит через конец фигуры.
Эта ситуация полностью аналогична рассмотренной в предыдущем пункте, только ось пересекает не гравитационный центр цилиндра, а конец этой фигуры. Тем не менее для решения проблемы можно воспользоваться результатом предыдущего пункта статьи. Применим вышеупомянутую теорему Штейнера, получим:
I = m*R2/4 + m*L02/12 + m*(L0/2)2 = m*R2/4 + m*L02/3
Заметим, что если R<<L0, тогда первым слагаемым можно пренебречь, и формула сводится к равенству:
I = m*L02/3
Этот момент инерции соответствует стержню с осью вращения на его конце.
Как известно, масса в динамике поступательного движения играет важную роль, определяя инерционные свойства движущихся тел. В динамике вращения вместо массы пользуются моментом инерции. Рассмотрим в статье, что это за величина и как определяется момент инерции цилиндра относительно оси.
Что такое момент инерции?
Эту величину обычно обозначают буквой I. Для материальной точки математическая формула момента инерции записывается так:
I = m*r2.
Где r – расстояние до оси вращения от точки массой m. Из формулы понятно, что единицей измерения величины являются килограммы на квадратный метр (кг*м2).
Если тело имеет сложную форму и его объемная плотность является переменной, тогда для определения I следует использовать такое интегральное выражение:
I = ∫m(r2*dm) = ∫V(r2*ρ*dV).
Где dm – это элементарная масса, находящаяся от оси вращения на расстоянии r.
Таким образом, момент инерции определяет распределение материи в теле сложной формы относительно конкретной оси вращения системы.
Сплошной цилиндр и главная ось
Момент инерции сплошного цилиндра может быть вычислен вокруг абсолютно любой оси с использованием интегрального выражения, записанного в предыдущем пункте. Здесь рассмотрим ситуацию, когда цилиндр массой M, радиусом R и высотой L вращается вокруг главной оси. Последняя представляет собой прямую, параллельную генератрисе фигуры и проходящую через центры ее круглых оснований.
Не будем вдаваться в подробности математических вычислений по интегральной формуле, а приведем сразу конечное выражение:
I1 = 1/2*M*R2.
Мы видим, что чем больше масса цилиндра и его радиус, тем больше момент инерции I1. В то же время эта величина никак не зависит от высоты фигуры L, то есть момент инерции тонкого диска можно вычислить также по этой формуле.
Отметим, что если всю массу цилиндра собрать в одну материальную точку, находящуюся от оси вращения на расстоянии радиуса R, то для нее момент инерции окажется в два раза больше, чем для сплошного цилиндра.
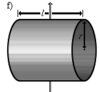
Однородный цилиндр и перпендикулярная генератрисе ось
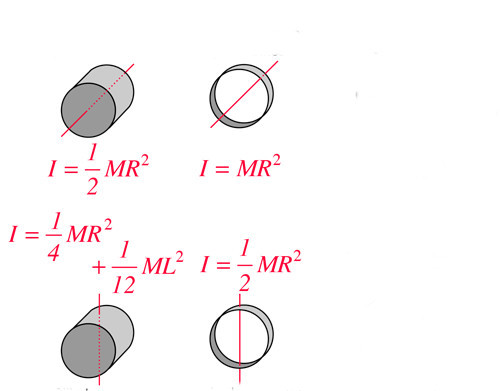
Теперь возьмем однородный цилиндр из примера выше и перевернем его на бок. Начнем вращать объект вокруг оси, которая проходит также через центр его масс, но уже перпендикулярна генератрисе (главной оси). Чему будет равен момент инерции цилиндра однородного в данном случае?
Как и в примере выше, здесь также ограничимся приведением соответствующего выражения. Оно будет иметь следующий вид:
I2 = 1/4*M*R2 + 1/12*M*L2.
Момент инерции I2 имеет более сложную зависимость от параметров цилиндра, чем I1, поскольку он определяется не только массой и радиусом, но и высотой фигуры. Заметим, что два слагаемых этой формулы представляют собой два крайних случая:
- Если цилиндр слишком маленькую высоту имеет, то мы получаем диск, который, вращаясь вокруг оси, проходящей через его диаметр, будет иметь момент 1/4*M*R2.
- Если радиус цилиндра стремится к нулю, то рассматриваемый объект превратится в стержень, и его момент инерции станет равным 1/12*M*L2.
Полый цилиндр
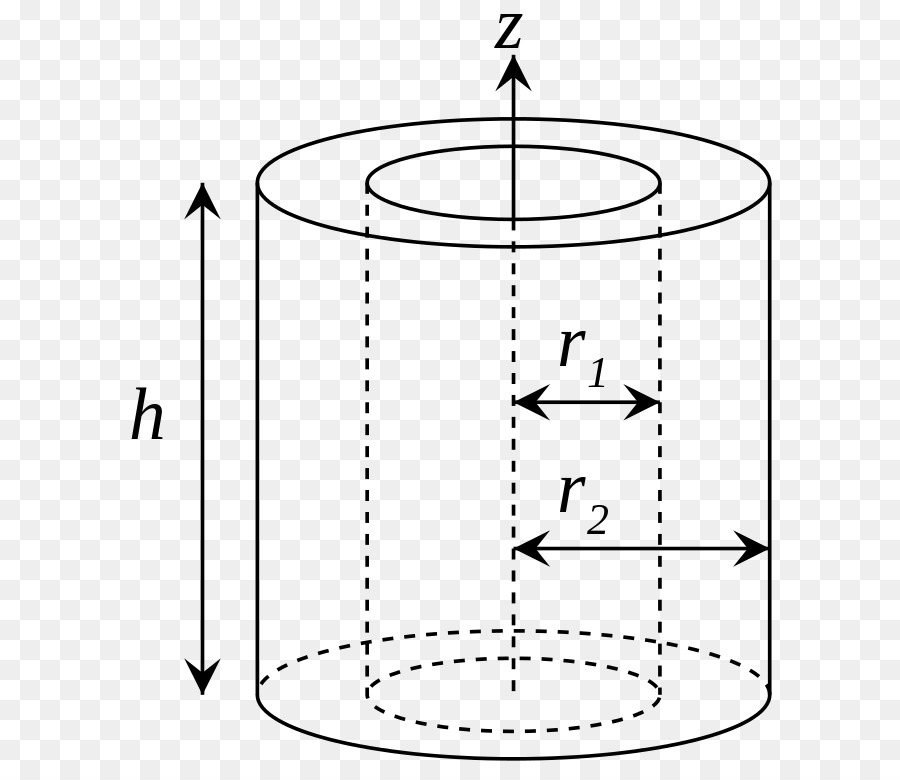
Выше мы рассмотрели, как рассчитывать момент инерции цилиндра вращающегося и однородного. Теперь предположим, что высота цилиндра и его масса остались теми же самыми, однако он стал полым, то есть, имеет два радиуса: внешний R1 и внутренний R2.
Применение все той же интегральной формулы позволяет получить выражение для момента инерции цилиндра полого, который вращается вокруг своей главной оси. Соответствующая формула выглядит так:
I3 = 1/2*M*(R12+R22).
Это выражение позволяет сделать важный вывод: при одинаковых массах полого и сплошного цилиндров первый обладает большим моментом инерции. Связан этот факт с тем, что большая часть массы полого цилиндра находится дальше от оси вращения, а как видно из формул, от радиуса изучаемая величина растет квадратично.

Где используются знания величин I для цилиндров?
Пожалуй, основной областью применения изложенной выше теории является автомобильная промышленность. В частности, коленчатый вал автомобиля снабжен тяжелым сплошным маховиком, имеющим цилиндрическую форму. Необходим маховик для того, чтобы обеспечить максимальную плавность вращения коленчатого вала, что отражается на плавности автомобильного хода. Маховик гасит любые большие угловые ускорения как во время разгона транспортного средства, так при его торможении.

Из формулы выше для момента инерции I1 понятно, что для увеличения этой величины выгоднее увеличить радиус, чем массу цилиндра (маховика). Так, удвоение массы приведет лишь к удвоению момента инерции. Однако если увеличить в два раза радиус, то I1 возрастет аж в 4 раза, что обеспечит более эффективное использование маховика.
Пример решения задачи
Прежде чем решать задачу, скажем несколько слов о динамике вращения. Как и в динамике поступательного движения, в ней существует формула, подобная второму закону Ньютона. Эта формула называется уравнением моментов. Записывается она так:
dL/dt = M.
Где L – момент импульса, M – момент внешних сил. Чаще всего это уравнение записывают в следующем виде:
M = I*α.
Здесь α – ускорение угловое. Из этого выражения видна аналогия со вторым ньютоновским законом.
Теперь перейдем к решению задачи. Известно, что сила в 100 Н действует по касательной к цилиндрической поверхности перпендикулярно главной оси вращения сплошного цилиндра на расстоянии 20 см. Масса цилиндра равна 10 кг, а его радиус составляет 20 см. Необходимо определить угловую скорость ω цилиндра через 5 секунд после начала действия силы.
Угловая скорость рассчитывается по формуле для равноускоренного движения:
ω = α*t.
Выражая ускорение из уравнения моментов и подставляя его в выражение, получим:
ω = M*t/I.
Момент силы вычисляется так:
M = F*d.
Где по условию задачи d = R. Подставляя это выражение и выражение для I сплошного цилиндра, получим конечную рабочую формулу:
ω = 2*F*t/(m*R).
Осталось сюда подставить все величины в единицах СИ и записать ответ: ω = 500 рад/с, что равно приблизительно 80 оборотам в секунду.
Задачи на тему «теорема Штейнера».
Сначала давайте соберем в «кучку» все формулы моментов инерции для часто встречающихся тел.
Момент инерции тонкого кольца (ось вращения перпендикулярна плоскости кольца и проходит через центр)
Момент инерции полого тонкостенного цилиндра (ось вращения совпадает с осью цилиндра)
Момент инерции сплошного цилиндра (ось вращения совпадает с осью цилиндра)
Момент инерции полого толстостенного цилиндра (ось вращения совпадает с осью цилиндра)
Момент инерции диска (ось вращения совпадает с осью диска)
Момент инерции диска (ось вращения совпадает с диаметром диска)
Момент инерции шара (ось вращения совпадает с центром)
Момент инерции полой тонкостенной сферы (ось вращения совпадает с центром)
Момент инерции тонкого стержня (ось вращения совпадает с центром)
Напоминаю теорему Штейнера: момент инерции тела относительно любой оси вращения равен моменту его инерции относительно параллельной оси, проходящей через центр масс тела, плюс произведение массы тела на квадрат расстояния между осями.

Теорема Штейнера
Теперь можно решить пару задач.
Задача 1.
Найти момент инерции обруча массой и радиусом относительно оси, проходящей через его край перпендикулярно обручу.
Решение:

К задаче 1
По таблице определим момент инерции обруча (кольца), и прибавим произведение массы тела на квадрат расстояния между осями, а это – радиус кольца. Тогда
Ответ:
Задача 2. Найти момент инерции тонкого стержня массой и длиной относительно оси, перпендикулярной стержню и проходящей через точку, отстоящую от конца стержня на одну треть его длины.
Решение.

К задаче 2
Расстояние между осями
Согласно таблице момент инерции стержня равен , тогда по теореме Штейнера
Ответ:
Задача 3.
Два шара радиусами см и массой г каждый скреплены тонким стержнем массой г и длиной см. Найти момент инерции системы относительно оси, перпендикулярной стержню и проходящей через центр тяжести, а также относительно оси, перпендикулярной стержню и проходящей в от его конца.

К задаче 3
Решение:
- Сначала найдем момент инерции системы относительно ее центра масс.
Здесь – момент инерции стержня, – момент инерции одного из шаров.
Момент инерции стержня определим по таблице, так как очевидно, что его центр является центром масс системы и ось вращения будет проходить через центр масс стержня.
Определим момент инерции одного из шаров по теореме Штейнера:
Тогда ответом на пункт а) будет
б) Теперь пусть ось проходит на расстоянии четверти длины стержня от его конца. Тогда момент инерции стержня будет равен по теореме Штейнера
Момент инерции шара, ближнего к оси вращения:
Момент инерции шара, дальнего от оси вращения:
Тогда ответом на пункт б) будет
Ответ: а) кг м, б) кг м.
Задача 4.
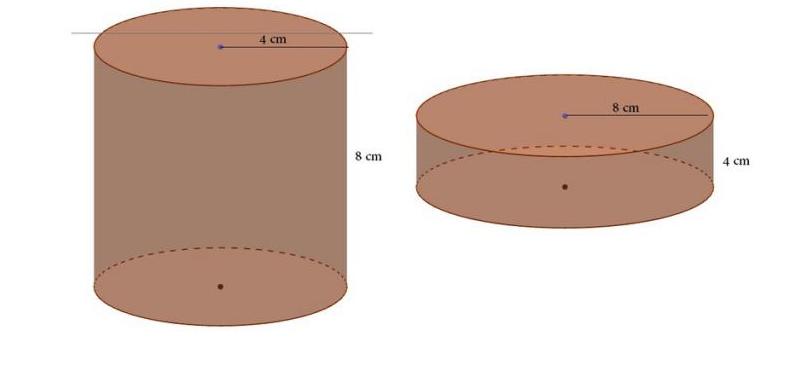
Имеется диск диаметром см и массой г. В диске вырезали круглое отверстие диаметром 8 см, центр которого находится на расстоянии от центра диска. Найти момент инерции фигуры относительно оси, проходящей через центр диска и перпендикулярной его плоскости.

К задаче 4
Решение:
– момент инерции диска, – вырезанная часть.
– масса вырезанной части. Массу вырезанной части найдем как
, – поверхностная плотность диска.
Если – площадь диска, а – площадь вырезанной части, то
Тогда момент инерции вырезанной части
И момент инерции фигуры
Ответ: кг м.
