Решение выполняется в два этапа:
1.Определение
реакций в опорах предварительно выбранных
подшипников: по
результатам первого этапа проводится
проверочный расчет подшипников.
2.Определение
реакций в опорах окончательно принятых
подшипников, построение эпюр изгибающих
и крутящих моментов и составление схемы
нагружения подшипников; второй
этап выполняется при проверочном расчете
валов на прочность.
Расчет
выполняется в следующей последовательности:
-
вычерчивается
расчетная схема вала в соответствии с
выполненной схемой нагружения валов
редуктора; -
выписываем
исходные данные для расчета: силы в
зацеплении редуктор- ной пары (Ft,Fr,
Fa)
и консольные силы гибкой передачи ^,п
и муфты Fm -
расставляем
расстояния между точками приложения
реакций в опорах подшипников и консольной
силы; -
определяем
реакции в опорах предварительно
выбранных подшипников вала в вертикальной
и горизонтальной плоскости, составив
два уравнения равновесия плоской
системы сил; -
определяем
суммарные радиальные реакции опор
подшипников, например, Ra
= J^fy,
Н, где RAx
и RAy
– соответственно реакции в опоре
подшипника А в горизонтальной и
вертикальной плоскости;
Расчеты
в вертикальной плоскости:
-
определяем
реакции в опорах окончательно принятых
подшипников, составив два уравнения
равновесия плоской системы сил; -
определяем
значения изгибающих моментов по
участкам, составив уравнения
изгибающих моментов; -
строим
в масштабе эпюру изгибающих моментов
и указываем максимальный момент;
Выполняем
расчеты в горизонтальной плоскости
аналогично расчетам в вертикальной
плоскости.
-
определяем
крутящий
момент на валу и строим в масштабе его
эпюру. Знак эпюры определяется
направлением момента от окружной силы
Ft,
если смотреть со стороны выходного
конца вала. -
определяем
суммарные реакции опор подшипников
вала. -
определяем
суммарные изгибающие моменты в наиболее
нагруженных
сечениях
вала Мсу„
= I
MJ
+ MJ,
Н-м, где Мх
и Му
– соответственно изгибающиемоменты
в горизонтальной и вертикальной
плоскости.составляем
схему нагружения подшипников.
9 Проверка долговечности подшипников
Конструкция
подшипникового узла должна обеспечивать
фиксацию валов
в осевом
направлении, компенсацию температурных
деформаций, надежную
смазку и
защиту подшипников от посторонних
частиц, удобство монтажа, демонтажа и
регулировки.
Выбор
типоразмера подшипника зависит от
характера нагрузки, ее вели-
чины и
направления, частоты вращения и условий
эксплуатации.
Проектируют
подшипниковые узлы в такой последовательности:
1. Выполняют
эскизную компоновку узла; на основании
расчетной схемы
намечают
расстояние между опорами и закрепленными
на валу деталями.
2. На
основании кинематической схемы и силовой
характеристики меха-
низма
определяют величины и направления
нагрузок на опоры.
3. Намечают
тип подшипника с учетом нагрузок,
конструкции узла, усло-
вий эксплуатации
и монтажа.
4. Определяют
эквивалентную нагрузку и проверяют
расчетную долговеч-
ность
подшипника.
5. Назначают
посадки на внутренние и наружные кольца
подшипника и
выбирают
способ крепления колец на посадочных
местах.
6. Определяют
систему смазки и конструкцию уплотнения.
7.
Окончательно оформляют конструкцию
подшипникового узла.
При выборе
подшипников следует руководствоваться
не только конструк-
тивными, но
и экономическими соображениями; например,
учитывать, что шари-
ковые
подшипники дешевле роликовых, подшипники
повышенных классов точ-
ности
значительно дороже подшипников
нормального класса.
В опорах,
подверженных действию ударных нагрузок,
предпочтение сле-
дует отдавать
роликоподшипникам. При действии на узел
только радиальных на-
грузок
следует, как правило, ставить
шарикоподшипники.
Для
подшипников с частотой вращения кольца
n < 1 мин-1 основной харак-
теристикой
служит статическая грузоподъемность
Со; при большей частоте вра-
щения –
динамическая грузоподъемность С.
По ГОСТ
18855-73 динамической грузоподъемностью
радиальных и ради-
ально-упорных
подшипников называют величину постоянной
радиальной нагрузки, которую группа
идентичных подшипников с неподвижным
наружным кольцом может выдержать в
течение 1 млн. оборотов внутреннего
кольца. Для упорных подшипников
динамическая грузоподъемность — это
постоянная центральная осевая нагрузка,
которую любой из группы идентичных
подшипников сможет выдерживать в течение
1 млн. оборотов одного из колец подшипника.
Под номинальной долговечностью понимают
срок службы подшипников, в течение
которого неменее 90% из данной группы
при одинаковых условиях должны проработать
безпоявления признаков усталости
металла.
Расчетную
долговечность L в млн. оборотов Lhили в часах определяют по
динамической
грузоподъемности С и величине эквивалентной
нагрузки Рэ
где L –
долговечность подшипника, млн. об;
а1 –
коэффициент надежности;
а23– обобщенный коэффициент совместного
влияния качества металла и ус-
ловий
эксплуатации подшипника;
С –
динамическая грузоподъемность, Н;
Рэ –
эквивалентная динамическая нагрузка,
Н;
m – показатель
степени, для шариковых радиальных
подшипников, m =3, для
роликоподшипников
m =3,33.
Для любых
подшипников
Lh=
где Lh –
базовая долговечность, ч;
~ 174 ~
L –
долговечность подшипника, млн. об;
n – частота
вращения подшипника, мин-1.
Требуемая
долговечность подшипника предусмотрена
ГОСТ 16162-85 и
составляет:
для червячных редукторов не менее 5000ч,
а для зубчатых – не менее
10000ч.
Эквивалентная
нагрузка в зависимости от вращения
колец, радиальной и
осевой
нагрузки определяется для радиальных
шарикоподшипников и радиально-
упорных
шарико – и роликоподшипников
Pэ=(XVFr+YFa)KσKT
Для упорных
шариковых и роликовых подшипников
Pэ=FaKσKт
где – коэффициент
радиальной нагрузки (таблицы 10.2 – 10.3);
– коэффициент
осевой нагрузки (таблицы 10.1 – 10.2);
– коэффициент,
учитывающий вращение колец; при вращении
внутреннего
кольца ,
наружного кольца ;
– радиальная
нагрузка, Н;
– осевая
нагрузка, Н;
– температурный
коэффициент (таблица 10.1);
– коэффициент
безопасности (таблица 10.4)__
Определение сил, нагружающих подшипники
Определение радиальных реакций. Вал на подшипниках, установленных по одному в опоре, условно рассматривают как балку на шарнирно-подвижных опорах или как балку с одной шарнирно-подвижной и одной шарнирно-неподвижной опорой. Радиальную реакцию Fr подшипника считают приложенной к оси вала в точке пересечения с ней нормалей, проведенных через середины контактных площадок. Для радиальных подшипников эта точка расположена на середине ширины подшипника. Для радиально-упорных подшипников расстояние а между этой точкой и торцом подшипника может быть определено графически (рис. 25) или аналитически:
подшипники шариковые радиально-упорные однорядные
а = 0,5[B + 0,5(d + D)tga];
подшипники роликовые конические однорядные
а = 0,5[Т + (d + D)е / 3].
Ширину В кольца, монтажную высоту Т коэффициент е осевого нагружения, угол а контакта, а также диаметры d и D принимают по каталогу.

Рис.25.Расположение точки приложения радиальной реакции в радиально-упорных подшипниках
Реакции опор определяют из уравнения равновесия: сумма моментов внешних сил относительно рассматриваемой опоры и момента реакции в другой опоре равна нулю.
В ряде случаев направление вращения может быть переменным или неопределенным, причем изменение направления вращения может привести к изменению не только направления, но и значений реакций опор. При установке на концы валов соединительных муфт направление силы на вал от муфты неизвестно. В таких случаях при расчете реакций рассматривают наиболее опасный вариант. Возможная ошибка при этом приводит к повышению надежности.
Определение осевых реакций. При установке вала на двух радиальных шариковых или радиально-упорных подшипниках нерегулируемых типов осевая сила Fa, нагружающая подшипник, равна внешней осевой силе FA, действующей на вал. Силу FA воспринимает тот подшипник, который ограничивает осевое перемещение вала под действием этой силы.
При определении осевых сил, нагружающих радиально-упорные подшипники регулируемых типов, следует учитывать осевые силы, возникающие под действием радиальной нагрузки Fr вследствие наклона контактных линий. Значения этих сил зависят от типа подшипника, угла контакта, значений радиальных сил, а также от того, как отрегулированы подшипники (см. рис 22, а-в). Если подшипники собраны с большим зазором, то всю нагрузку воспринимает только один или два шарика или ролика (рис. 22, а). Осевая составляющая нагрузки при передаче ее одним телом качения равна Frtga. Условия работы подшипников при таких больших зазорах неблагоприятны, и поэтому такие зазоры недопустимы. Обычно подшипники регулируют так, чтобы осевой зазор при установившемся температурном режиме был бы близок к нулю. В этом случае под действием радиальной нагрузки Fr находятся около половины тел качения (рис. 22, б), а суммарная по всем нагруженным телам качения осевая составляющая из-за наклона контактных линий равна е’ Fr и представляет собой минимальную осевую силу, которая должна действовать на радиально-упорный подшипник при заданной радиальной силе:
Fa min = е′ Fr. (24)
Для шариковых радиально-упорных подшипников с углом контакта а < 18° Famin = e’Fr , где е’ — коэффициент минимальной осевой нагрузки. В подшипниках такого типа действительный угол контакта отличается от начального и зависит от радиальной нагрузки Fr и базовой статической грузоподъемности Соr. Поэтому коэффициент е’ определяют по формулам:
для подшипников с углом контакта а = 12°
е′ = 0,563(Fr / Cor)0,195; (25)
для подшипников с углом контакта а = 15°
е′ = 0,579(Fr / Cor)0,136 (26)
Для шариковых радиально-упорных подшипников с углом контакта а ≥ 18° е′ = е и Famin = eFr . Значения коэффициента еосевого нагружения принимают по табл. 64.
Для конических роликовых.е’ = 0,83е и Famin = 0,83 е Fr. Значения коэффициента е принимают по каталогу.
Под действием силы Faminнаружное кольцо подшипника поджато к крышке корпуса. При отсутствии упора кольца в крышку оно будет отжато в осевом направлении, что приведет к нарушению нормальной работы подшипника. Для обеспечения нормальных условий работы oceвая сила, нагружающая подшипник, должна быть не меньше минимальной: Fa > Famin.
Это условие должно быть выполнено для каждой опоры.
Если Fa≥ Famin, то более половины или все тела качения подшипника находятся под нагрузкой (см. рис. 22, в). Жесткость опоры с ростом осевой нагрузки увеличивается, поэтому в некоторых опорах, например в опорах шпинделей станков, применяют сборку с предварительным натягом. Для нормальной работы радиально-упорных подшипников необходимо, в каждой опоре осевая сила, нагружающий подшипник, была бы не меньше минимальной:
Fa1 ≥ Fa1 minи Fa2 ≥ Fa2 min
Кроме того, должно быть выполнено условие равновесия вала — равенство нуля суммы всех осевых сил, действующих на вал. Например, для схемы по рис. 26 имеем:
FA + Fa1 – Fa2 = 0
Пример нахождения осевых peaкций опор. В представленной на рис. 26 расчетной схеме обозначены: FAи FR — внешние осевая и радиальная нагрузки, действующие на вал; Fr1 и Fr2 — радиальные peaкции опор; Fa1 и Fa2 — осевые реакции опор.
Решение может быть найдено при совместном удовлетворении трех уравнений:
— из условия Fa≥ Famin в каждой oпоре с учетом (24) следует:
Fa1 ≥ e1′ Fr1, Fa2 ≥ e1′ Fr2
— из условия равновесия вала под действием осевых сил следует:

Рис. 26. Схема нагружения вала и опор с радиально-упорными регулируемыми подшипниками
Для нахождения решения применяют метод попыток, предварительно осевую силу в одной из опор принимая равной минимальной.
1. Пусть, например, Fa1 = e1′ Fr1 .
Тогда из условия равновесия вала имеем
Fa2 = FA + Fa1 = FA + e′Fr1.
Проверяем выполнение условия Fa > Faminдля второй опоры. Если при этом Fa2 ≥ e2‘ Fr2 — то осевые силы найдены правильно. Если Fa2 < е2′ Fr2 (что недопустимо), то нужно предпринять вторую попытку.
2. Следует принять: Fa2 = е2′ Fr2 . Тогда из условия равновесия вала имеем
Fa1 = Fa2 — FA = e2‘ Fr2 — FA.
При этом условие Fa1 ≥ e1′ Fr1 будет обязательно выполнено.
Подбор подшипников
Основной критерий работоспособности и порядок подбора подшипников зависит от значения частоты вращения кольца. Подшипники выбирают по статической грузоподъемности, если они воспринимают внешнюю нагрузку в неподвижном состоянии или при медленном вращении (n≤ 10об/мин). Подшипники, работающие при n > 10об/мин, выбирают по динамической грузоподъемности, рассчитывая их ресурс при требуемой надежности. Подшипники, работающие при частоте вращения n > 10об/мин и резко переменной нагрузке, также следует проверять на статическую грузоподъемность.
Предварительно назначают тип и схему Установки подшипников (см. выше). Подбор подшипников выполняют для обеих опор вала. В некоторых изделиях, например в редукторах, для обеих опор применяют подшипники одного типа и одного размера. Тогда подбор выполняют по наиболее нагруженной опоре. Иногда из соотношения радиальных и осевых сил нельзя заранее с уверенностью сказать, какая опора более нагружена. Тогда расчет ведут параллельно для обеих опор до получения значений эквивалентных нагрузок, по которым и определяют более нагруженную опору.
Расчет подшипников на статическую грузоподъемность
Значения базовой статической грузоподъемности для каждого подшипника заранее подсчитаны по формулам (1)-(4) и указаны в каталоге.
При расчете на статическую грузоподъемность проверяют, не будет ли статическая эквивалентная нагрузка на подшипник превосходить статическую грузоподъемность, указанную в каталоге:
Роr≤ Соrили Poa≤ Coa
При выборе и расчете подшипников следует иметь в виду, что допустимая статическая эквивалентная нагрузка Ро может быть меньше, равна или больше базовой статической грузоподъемности. Значение этой нагрузки зависит от требований к плавности хода, малошумности и к моменту трения, а также и от действительной геометрии поверхностей контакта. Чем выше перечисленные требования, тем меньше значение допустимой статической эквивалентной нагрузки.
Если не требуется высокая плавность хода, то возможно кратковременное повышение Por(Poa) до 2Cor(2Coa). При повышенных требованиях к плавности хода, малошумности и к стабильности момента трения рекомендуют уменьшить допускаемую статическую эквивалентную нагрузку Pоr(Pоа) до Cоr/ S0 (Соa/ S0). Коэффициент запаса S0 = 1,5 для упорных подшипников крановых крюков и подвесов; S0 = 2 для приборных прецизионных поворотных устройств; S0 = 4 для ответственных тяжелонагруженных опор и поворотных кругов.
Пример. Проверить пригодность подшипника 210 для следующих условий работы: вращение медленное (до 1об/мин) эпизодическое при действии нагрузки с составляющими: радиальной Fr = 9000Н и осевой Fo = 1600Н; требования к малошумности и плавности хода — высокие.
Решение. Базовая статическая радиальная грузоподъемность подшипника 210 по каталогу Соr= 19800Н. Для шарикового радиального однорядного подшипника в соответствии с табл. 59 X0 = 0,6 и Y0 = 0,5. Подставив в (5) и (6), получим
Por = X0Fr + Y0Fa = 0,6 · 9000 + 0,5 · 1600 = 6200H;
Por= Fr = 9000H.
Принимаем наибольшее значение Por= 9000H. Для шариковых подшипников с высокими требованиями к малошумности и плавности хода можно принять S0 = 2. Для таких условий работы должно выполняться соотношение Роr≤ Соr / S0. После подстановки получим:
9000 < 19800/2 = 9900.
Следовательно, для данных условий работы подшипник 210 пригоден.
Расчет подшипников на заданный ресурс
Исходные данные:Fr1, Fr2 — радиальная нагрузка (радиальная реакция) каждой опоры двухопорного вала, Н: Fa -внешняя осевая сила, действующая на вал, Н; n- частота вращения кольца (как правило, частота вращения вала), об/мин; d — диаметр посадочной поверхности вала, который берут из компоновочной схемы, мм; L’sa, L’sah — требуемый ресурс при необходимой вероятности безотказной работы подшипника соответственно в млн. об.или в ч; режим нагружения; условия эксплуатации подшипникового узла (возможная перегрузка, рабочая температура и др.).
Условия работы подшипников весьма разнообразны и могут различаться по величине кратковременных перегрузок, рабочей температуре, вращению внутреннего или наружного кольца и др. Влияние этих факторов на работоспособность подшипников учитывают введением в расчет эквивалентной динамической нагрузки (19) — (22) дополнительных коэффициентов.
Подбор подшипников качения выполняют в такой последовательности.
1. Предварительно назначают тип и схему установки подшипников.
2. Для назначенного подшипника из каталога выписывают следующие данные:
— для шариковых радиальных и радиально-упорных с углом контакта а < 18° значения базовых динамической Сr и статической Соr радиальных грузоподъемностей;
— для шариковых радиально-упорных углом контакта а ≥ 18° значение Сr, а из табл. 64 значения коэффициентов X радиальной, Y осевой нагрузок, коэффициента осевого нагружения:
— для конических роликовых значений Сr, Y и е, а также принимают X = 0,4 (табл. 66).
3. Из условия равновесия вала и условия ограничения минимального ypoвня осевых нагрузок на радиально-упорные подшипники определяют осевые силы Fa1, Fa2.
4. Для подшипников шариковых радиальных, а также шариковых радиально-упорных с углом контакта а < 18° по табл. 64 в соответствии с имеющейся информацией находят значения X, Yи е в зависимости от
f0Fa / CorилиFa / (i z Dw2).
5. Сравнивают отношение Fa/(VFr) с коэффициентом е и окончательно принимают значения коэффициентов X и Y: при Fa/(VFr)≤eпринимают X = 1 и Y=0, при Fa/(VFr)>eдля подшипников шариковых радиальных и радиально-упорных окончательно принимают записанные ранее (в п.1 и 4) значения коэффициентов X и Y.
Здесь V — коэффициент вращения кольца: V = 1 при вращении внутреннего кольца подшипника относительно направления радиальной нагрузки и V= 1, 2 при вpaщении наружного кольца.
Для двухрядных конических роликовых подшипников значения X, Y и е – по табл. 66.
6. Вычисляют эквивалентную динамическую нагрузку:
— радиальную для шариковых радиальных и шариковых или роликовых радиально-упорных
Рr = (VXFr + YFa) KБKT; (27)
— радиальную для роликовых радиальных подшипников:
Pr =Fr V КБКТ; (28)
— осевую для шариковых и роликовых упорных подшипников:
Pа = Fа КБКТ (29)
— осевую для шариковых и роликовых упорно-радиальных подшипников
Pa = (XFr+ YFa) KБKT. (30)
Значение коэффициента КБ безопасности принимают по табл. 69, а температурного коэффициента КТ — в зависимости от рабочей температуры tраб подшипника:
|
tраб, °С |
≤100 |
125 |
150 |
175 |
200 |
225 |
250 |
|
КТ |
1,0 |
1,05 |
1,10 |
1,15 |
1,25 |
1,35 |
1,4 |
69. Рекомендуемые значения коэффициентов безопасности
|
Характер нагрузки |
КБ |
Область применения |
|
Спокойная нагрузка без толчков |
1,0 |
Маломощные кинематические редукторы и приводы. Механизмы ручных кранов, блоков. Тали, кошки, ручные лебедки. Приводы управления |
|
Легкие толчки; кратковременные перегрузки до 125% номинальной нагрузки |
1,0-1,2 |
Прецизионные зубчатые передачи. Металлорежущие станки (кроме строгальных, долбежных и шлифовальных). Гироскопы. Механизмы подъема кранов. Электротали и монорельсовые тележки. Лебедки с механическим приводом. Электродвигатели малой и средней мощности. Легкие вентиляторы и воздуходувки |
|
Умеренные толчки; вибрационная нагрузка; кратковременные перегрузки до 150% номинальной нагрузки |
1,3-1,5 |
Зубчатые передачи. Редукторы всех типов. Механизмы передвижения крановых тележек и поворота кранов. Буксы рельсового подвижного состава. Механизмы поворота кранов |
|
То же, в условиях повышенной надежности |
1,5-1,8 |
Механизмы изменения вылета стрелы кранов. Шпиндели шлифовальных станков. Электрошпиндели. |
|
Нагрузки со значительными толчками и вибрациями; кратковременные перегрузки до 200% номинальной нагрузки |
1,8-2,5 |
Зубчатые передачи. Дробилки и копры. Кривошипно-шатунные механизмы. Валки и адъюстаж прокатных станов. Мощные вентиляторы и эксгаустеры |
|
Нагрузка с сильными ударами; кратковременные перегрузки до 300% номинальной нагрузки |
2,5-3,0 |
Тяжелые ковочные машины. Лесопильные рамы. Рабочие роликовые конвейеры крупносортных станов, блюмингов и слябингов. Холодильное оборудование |
Для работы при повышенных температурах применяют подшипники со специальной стабилизирующей термообработкой изготовленные из теплостойких сталей. Для подшипников, работающих при переменных режимах нагружения, задаваемых циклограммой нагрузок и соответствующими этим нагрузкам частотами вращения (рис. 27), вычисляют эквивалентную динамическую нагрузку при переменном режиме нагружения

где Рi и Li — постоянная эквивалентная нагрузка (радиальная или осевая) на i-м режиме и продолжительность ее действия в млн. об. Если Li задана в ч-Lhi, то ее пересчитывают на млн. об.с учетом частоты вращения ni, об/мин:

Если нагрузка на подшипник изменяется по линейному закону от Рminдо Рmax, то эквивалентная динамическая нагрузка


Рис. 27.Аппроксимация нагрузок и частот вращения
Известно, что режимы работы машин с переменной нагрузкой сведены к шести типовым режимам нагружения (см. ГОСТ 21354-87. Передачи зубчатые цилиндрические эвольвентные внешнего зацепления. Расчет на прочность): 0 — постоянному; I -тяжелому; II — среднему равновероятному; III- среднему нормальному; IV — легкому; V — особо легкому.
Для подшипников опор валов зубчатых передач, работающих при типовых режимах нагружения, расчеты удобно вести с помощью коэффициента эквивалентности КE:
|
Режимработы |
0 |
I |
II |
III |
IV |
V |
|
KE |
1,0 |
0,8 |
0,63 |
0,56 |
0,5 |
0,4 |
При этом по известным максимальным, длительно действующим силам Fr1max, Fr2 max, FAmax(соответствующим максимальному из длительно действующих вращающему моменту) находят эквивалентные нагрузки [3]:

по которым в соответствии с пп. 2-6 ведут расчет подшипников, как при постоянной нагрузке.
7. Определяют скорректированный по уровню надежности и условиям применения расчетный ресурс подшипника, ч:

где С — базовая динамическая грузоподъемность подшипника (радиальная Сr или осевая Са), Н; Р — эквивалентная динамическая нагрузка (радиальная Рr или осевая, а при переменном режиме нагружения или РЕа), Н; k — показатель степени: k для шариковых и k = 10/3 для роликовых подшипников; n — частота вращения кольца, об/мин; а1 — коэффициент, корректирующий ресурс в зависимости от необходимой надежности (табл. 68); а23 — коэффициент, характеризующий совместное влияние на ресурс особых свойств подшипника и условий его эксплуатации (табл. 70).
Базовый расчетный ресурс подтверждают результатами испытаний подшипника на специальных машинах и в определенных условиях, характеризуемых наличием гидродинамической пленки масла между контактирующими поверхностями колец и отсутствием повышенных перекосов колец подшипника. В реальных условиях эксплуатации возможны отклонения от этих условий, что приближенно и oценивают коэффициентом а23.
При выборе коэффициента а23 различают следующие условия применения подшипника:
1 — обычные (материал обычной плавкой, наличие перекосов колец, отсутствие надежной гидродинамической пленки масла, наличие в нем инородных частиц);
2 — характеризующиеся наличием упругой гидродинамической пленки масла в контакте колец и тел качения (параметр Δ ≥ 2,5); отсутствие повышенных перекосов в узле; сталь обычного изготовления;
3 — то же, что в п.2, но кольца и тела качения изготовлены изстали электрошлакового или вакуумно-дугового переплава.
70. Рекомендуемые значения коэффициента
|
Подшипники |
Значения коэффициента а23 для условий применения |
||
|
1 |
2 |
3 |
|
|
Шариковые (кроме сферических) |
0,7 … 0,8 |
1,0 |
1,2 … 1,4 |
|
Роликовые с цилиндрическими роликами, шариковые сферические двухрядные |
0,5 … 0,6 |
0,8 |
1,0… 1,2 |
|
Роликовые конические |
0,6 … 0,7 |
0,9 |
1,1 … 1,3 |
|
Роликовые сферические двухрядные |
0,3 … 0,4 |
0,6 |
0,8 … 1,0 |
71. Рекомендуемые значения расчетных ресурсов для машин и оборудования
|
Машины, оборудование и условия их эксплуатации |
Ресурс, ч |
|
Приборы и аппараты, используемые периодически (демонстрационная аппаратура, бытовая техника, приборы) |
300 … 3000 |
|
Механизмы, используемые в течение коротких периодов времени (сельскохозяйственные машины, подъемные краны в сборочных цехах, легкие конвейеры, строительные машины и механизмы, электрический ручной инструмент) |
3000 …8000 |
|
Ответственные механизмы, работающие с перерывами (вспомогательные механизмы на силовых станциях, конвейеры для поточного производства, лифты, нечасто используемые металлообрабатывающие станки) |
8000 … 12000 |
|
Машины для односменной работы с неполной нагрузкой (стационарные электродвигатели, редукторы общепромышленного назначения) |
10000 … 25000 |
|
Машины, работающие с полной нагрузкой в одну смену (машины общего машиностроения, подъемные краны, вентиляторы, распределительные валы, конвейеры, полиграфическое оборудование) |
-25000 |
|
Машины для круглосуточного использования (компрессоры, шахтные подъемники, стационарные электромашины, судовые приводы, текстильное оборудование) |
≥40000 |
|
Непрерывно работающие машины с высокой нагрузкой (оборудование бумагоделательных фабрик, энергетические установки, шахтные насосы, оборудование торговых морских судов, карусельные печи) |
-100000 |
Здесь Δ — параметр режима смазки — характеризует гидродинамический режим смазки подшипника (относительную толщину смазочной пленки). Расчет Δ приведи, например, в [1, 2].
Формулы расчета ресурса справедливы при частотах вращения свыше 10об/мин до предельных по каталогу, а также если Pr (или Pa), а при переменных нагрузках Рrmax(или Pamax) не превышают 0,5Сr (или 0,5Ca).
8. Оценивают пригодность намеченного размера подшипника. Подшипник пригоден, если расчетный ресурс больше или равен требуемому:
Lsah≥ Lsah′.
В некоторых случаях в одной опоре устанавливают два одинаковых радиальных или радиально-упорных однорядных подшипника, образующих один подшипниковый узел. При этом пару подшипников рассматривают как один двухрядный подшипник. При определении ресурса по формуле п. 7 вместо Сr подставляют базовую динамическую радиальную грузоподъемность Сrсум комплекта из двух подшипников: для шарикоподшипников Сrсум = 1,625 Сr, для роликоподшипников Сrсум = 1,714Сr. Базовая статическая радиальная грузоподъемность такого комплекта равна удвоенной номинальной грузоподъемности одного однорядного подшипника C0rcум = 2С0r.
При определении эквивалентной нагрузки Рr значения коэффициентов X и Y принимают как для двухрядных подшипников: для шарикоподшипников по табл. 64; для роликоподшипников — по табл. 66.
Рекомендуемые значения ресурсов подшипников различных машин приведены в табл. 71.
Пример 1. Подобрать подшипники качения для опор выходного вала цилиндрического зубчатого редуктора (рис. 28). Частота вращения вала n = 120об/мин. Требуемый ресурс при вероятности безотказной работы 90%: L10ah′ = 25000ч. Диаметр посадочных поверхностей вала d = 60мм. Максимальные, длительно действующие силы: Fr1max=6400Н, Fr2mах = 6400Н, FAmax= 2900H. Режим нагружения — II(средний равновероятный). Возможны кратковременные перегрузки до 150% номинальной нагрузки. Условия применения подшипников — обычные. Ожидаемая температура работы tpаб = 50°С.
Решение. 1. Для переменного типового режима нагруженияII коэффициент эквивалентности КE = 0,63 (см. п.6).
Вычисляем эквивалентные нагрузки, приводя переменный режим нагружения к эквивалентному постоянному:
Fr1 = KEFr1 max = 0,63 · 6400 = 4032Н;

Рис. 28. Расчетная схема к примеру 1
Fr2 = KEFr2max = 0,63 · 6400 = 4032Н;
FA = KEFAmax = 0,63 · 2900 = 1827Н.
2. Предварительно назначаем шариковые радиальные подшипники легкой ceрии 212. Схема установки подшипников: 2а (см. рис. 24) — обе опоры фиксирующие; каждая фиксирует вал в одном направлении.
3. Для принятых подшипников по каталогу находим: Сr — 52000Н, Соr = 31000H, d = 60мм, D = 110мм, Dw= 15,88мм.
4. Для радиальных шарикоподшипников из условия равновесия вала следует Fa1 = FA= 1827Н, Fa2 = 0. Дальнейший расчет выполняем для более нагруженного подшипника опоры 1.
5. По табл. 58 для отношений Dwcosа / Dpw = 15,88cos0° / 85 = 0,19 находим значение f0 = 14,2; здесь Dpw= 0,5(d + D) = 0,5(60 + 110) = 85мм. Далее по табл. 64 определяем значение коэффициента е для отношения f0Fa1 / Соr = 14,2 × 1827 / 31000 = 0,837 : е = 0,27.
6. Отношение Fa / Fr = 1827 / 4032 = 0,45, что больше е = 0,27. По табл. 64 для отношения f0Fa1 / Cor = 0,837 принимаем Х = 0,56, Y= 1,64.
7. Эквивалентная динамическая радиальная нагрузка по формуле (27) при V = 1 (вращение внутреннего кольца); КБ = 1,4 (см. табл. 69); КТ = 1 (tраб < 100°С)
Рr = (1 · 0,56 · 4032 + 1,64 · 1827) 1,4 · 1 = 7356Н.
8. Расчетный скорректированный ресурс подшипника по формуле (31) при а1= 1 (вероятность безотказной работы 90%, табл. 68), а23 = 0,7 (обычные условия применения, табл. 70), k = 3 (шариковый подшипник)

9. Так как расчетный ресурс больше требуемого: L10ah > L10ah′ (34344 > 25000), то предварительно назначенный подшипник 212 пригоден. При требуемом ресурсе надежность выше 90%.
Пример 2. Подобрать подшипники для опор вала редуктора привода цепного конвейера (рис. 29). Частота вращения вала n = 200об/мин. Требуемый ресурс при вероятности безотказной работы 90%:
L10ah′ = 20000ч. Диаметр посадочных поверхностей вала d = 45мм. Максимальные, длительно действующие силы: Fr1max= 9820Н, Fr2max = 8040Н, FAmax= 3210Н. Режим нагружения — III (средний нормальный). Возможны кратковременные перегрузки до 150% номинальной нагрузки. Условия применения подшипников обычные. Ожидаемая температура работы tраб = 45°С.
Решение. 1. Для переменного типового режима нагруженияIII коэффициент эквивалентности КE= 0,56 (см. п.6).
Вычисляем эквивалентные нагрузки, приводя переменный режим нагружения к эквивалентному постоянному:

2. Предварительно назначаем конические роликовые подшипники легкой серии — 7209А. Схема установки подшипников: 2а (см. рис. 24) — обе опоры фиксирующие: каждая фиксирует вал в одном направлении.
3. Для принятых подшипников из каталога находим: Сr = 62700Н, е = 0,4, Y = 1,5.
4. Минимально необходимые для нормальной работы радиально-упорных подшипников осевые силы:

Рис.29. Расчетная схема к примеру 2
Находим осевые силы, нагружающие подшипники.
Примем Fa1 – Fa1 min = 1826Н; тогда из условия равновесия вала следует: Fa2 = Fa1 +FA= 1826 + 1798 = 3624Н, что больше — Fa2min= 1495Н, следовательно, осевые реакции опор найдены правильно.
5. Отношение Fa1 / Fr1 = 1826 / 5499 = 0,33, что меньше е = 0,4. Тогда для опоры 1: Х = 1, У = 0.
Отношение Fa2 / Fr2 = 3624 / 4502 = 0,805, что больше е = 0,4. Тогда для опоры 2: X = 0,4, У = 1,5.
6. Эквивалентная динамическая радиальная нагрузка для подшипников при V = 1; КБ = 1,4 (см. табл. 69) и КТ = 1 (tраб < 100°С) в опорах 1 и 2.

7. Для подшипника более нагруженной опоры 2 вычисляем по формуле (31) расчетный скорректированный ресурс при а1 = 1 (вероятность безотказной работы 90%, табл. 68), a23 = 0,6 (обычные условия применения, табл. 70) и k = 10/3 (роликовый подшипник)

8. Так как расчетный ресурс больше требуемого: L10ah > L10ah′ (21622 > 20000), то предварительно назначенный подшипник 7209А пригоден. При требуемом ресурсе надежность несколько выше 90%.
Пример 3. Подобрать подшипники для опор вала червяка (рис. 30). Частота вращения вала 920об/мин. Требуемый ресурс при вероятности безотказной работы 90%:
L10ah′ = 2000ч. Диаметр посадочных поверхностей вала d = 30мм. Максимальные, длительно действующие силы: Fr1 max = 1000Н, Fr2 max = 1200Н, FAmax = 2200Н.

Рис. 30. Расчетная схема к примеру 3
Режим нагружения — 0 (постоянный). Возможны кратковременные перегрузки до 150% номинальной нагрузки. Условия применения подшипников — обычные. Ожидаемая температура работы tраб = 65°С.
Решение. 1. Для типового режима нагружения 0 коэффициент эквивалентности KE= 1,0.
Вычисляем эквивалентные нагрузки:

2. Предварительно назначаем шариковые радиально-упорные подшипники легкой серии — 36206, угол контакта α = 12°. Схема установки подшипников: 2а (см. рис. 24) – обе опоры фиксирующие; каждая фиксирует вал в одном направлении.
3. Для принятых подшипников из каталога находим: Сr = 22000Н, Сor = 12000Н, d= 30мм, D = 62мм, Dw = 9,53мм.
4. Минимально необходимые для нормальной работы радиально-упорных подшипников осевые силы в соответствии с формулами (24), (25):
для опоры 1

Находим осевые силы, нагружающие подшипники.
Примем Fa1 = Fa1 min = 347Н, тогда условия равновесия вала следует: Fa2 = Fa1 + FA = 347 + 2200 = 2547Н, что больше Fa2min= 431Н, следовательно, осевые реакции опор найдены правильно.
5. Дальнейший расчет выполняем более нагруженной опоры 2. По табл. для отношения Dwcosα / Dpw = 9,53 × cos12°/46 = 0,2 находим значение f0 = 14 , здесь Dpw= 0,5(d + D) = 0,5(30 + 62) = 46. Далее по табл. 64 определяем значение коэффициента е для отношений f0iFa2 / Сor = 14 · 1 · 2547 / 12000 = 2,97 : е = 0,49 (определено линейным интерполировав для промежуточных значений «относительной осевой нагрузки» и угла контакта). Отношение Fa2 / Fr2 = 2547 / 1200 = 2,12, что больше е = 0,49. Тогда для опоры (табл. 64): Х= 0,45; Y= 1,11 (определеным линейным интерполированием для значений «относительной осевой нагрузки» 2,! и угла контакта 12°).
6. Эквивалентная динамическая радиальная нагрузка по формуле (27) при V = 1, КБ =1,3 (см. табл. 69) и КТ = 1 (tраб < 100°С)

7. Расчетный скорректированный ресурс, при а1 = 1 (вероятность безотказной работы 90%, табл. 68), а23 = 0,7 (обычные условия применения, табл. 70) и k = 3 (шариковый подшипник)

8. Так как расчетный ресурс больше требуемого: L10ah > L10ah′ (2317 > 2000), то предварительно назначенный подшипник 36206 пригоден. При требуемом ресурсе надежность несколько выше 90%.
Пример 4. Вычислить скорректированный расчетный ресурс роликовых конических подшипников 1027308А фиксирующей опоры вала червяка (рис. 31). Частота вращения вала n = 970об/мин. Вероятность безотказной работы 95%. Максимальные, длительно действующие силы: Frmax = 3500Н, FAmax = 5400Н. Режим нагружения — I(тяжелый). Возможны кратковременные перегрузки до 150% номинальной нагрузки. Условия применения подшипников — обычные. Ожидаемая температура работы tраб = 85°С.
Решение. 1. Для переменного типового режима нагруженияI коэффициент эквивалентности KE = 0,8 (см. п.6).
Вычисляем эквивалентные нагрузки, приводя переменный режим нагружения к эквивалентному постоянному:

2. Для роликоподшипника конического с большим углом конусности — условное обозначение 1027308A- по каталогу Сr= 69300Н, е = 0,83.
3. Подшипниковый узел фиксирующей опоры червяка образуют два одинаковых роликовых радиально-упорных конических подшипника, которые рассматривают как один двухрядный подшипник, нагруженный силами Fr и Fa = FA. Для комплекта из двух роликоподшипников имеем Сrсум = 1,714Сr= 1,714 · 69300 = 118780Н.
4. Отношение Fa/ Fr = 4320/2800 = 1,543, что больше е = 0,83. Определим значение угла контакта α (табл. 66):
α = arctg(e / 1,5) = arctg(0,83 / 1,5) = 28,96°.
Тогда для двухрядного роликового радиально-упорного подшипника:
Х= 0,67;
Y=0,67ctgα = 0,67ctg28,96º = 1,21.
5. Эквивалентная динамическая радиальная нагрузка по формуле (27) при V = 1; КБ = 1,4; КТ = 1

6. Расчетный скорректированный ресурс а1 = 0,62 (вероятность безотказной работы 95%, табл. 68), а23 = 0,6 (табл. 70) и k = 10/3 (роликовый подшипник)

Рис. 31. Расчетная схема к примеру 4

Расчет допустимой осевой нагрузки для роликовых радиальных подшипников
Роликоподшипники с короткими цилиндрическими роликами, как правило, применяют только для восприятия радиальных сил. Способность роликовых радиальных подшипников выдерживать осевые нагрузки зависит от конструкции подшипника и качества их исполнения.
Подшипники типов 12000, 42000, 62000 и 92000 помимо радиальной могут также воспринимать бортиками колец и торцами роликов относительно небольшие осевые нагрузки, которые в определенных допустимых пределах не вызывают снижения расчетного ресурса, при вычислении которого учитывают лишь радиальные силы. Это обусловлено тем, что радиальные силы воспринимают образующие роликов, контактирующие с дорожками качения колец, тогда как осевые силы действуют на борта колец и торцовые поверхности роликов.
При этом важную роль имеют характер нагрузки, частота вращения и смазывание подшипника.
Допустимую осевую нагрузку [Fa] можно определить по формулам:
— для подшипников серий диаметров 1, 2, 3 и 4

— для подшипников серий диаметров 5 и 6

где kA и kB — коэффициенты, значения которых приведены в табл. 72 и 73; Сor — статическая грузоподъемность, Н; n — наибольшая частота вращения, об/мин; D и d -соответственно наружный диаметр и диаметр отверстия подшипника.
При малых частотах вращения допустимы случайные кратковременные нагрузки большей величины, но не выше 40% статической грузоподъемности подшипника.
72. Значения коэффициента kA
|
Условия работы подшипника, смазочный материал (примеры применения) |
kА |
|
Постоянная осевая сила при высокой частоте вращения и высокой температуре, высокотемпературные масла (не рекомендуется применять роликоподшипники с цилиндрическими роликами) |
0 |
|
Переменная осевая сила и умеренная температура, пластичный смазочный материал — тяговые электродвигатели Непродолжительная осевая сила и низкая температура, жидкий смазочный материал — коробки передач автомобилей: |
0,02 |
|
главная передача |
0,1 |
|
вал шестерни заднего хода |
0,2 |
|
Случайная осевая сила и низкая температура, пластичный смазочный материал — блоки, электротали, кран-балки |
0,2 |
73. Значения коэффициента kB
|
Серия подшипника по диаметру (третья цифра справа в условном обозначении) |
kB |
|
1, 2, 5 |
8,5 · 10-5 |
|
3. 6 |
7 · 10-5 |
|
4 |
6 · 10-5 |
Связями называют тела, ограничивающие свободу перемещения рассматриваемого тела.
Реакции связей — это усилия, с которыми связи действуют на данное тело.
Тела в природе бывают свободными и несвободными. Тела, свобода перемещения которых ничем не ограничена, называются свободными.
Одним из основных положений механики является принцип освобождаемости от связей, согласно которому несвободное тело можно рассматривать как свободное, если отбросить действующие на него связи и заменить их силами – реакциями связей.
Очень важно правильно расставить реакции связей, иначе написанные уравнения окажутся неверными.
Рассмотрим реакции связей основных типов, встречающихся при решении задач: гладкой поверхности, ребра, гибкой нити, стержня, шарнирных опор и заделок, а также примеры замены связей их реакциями.
Реакции гладкой поверхности и ребра
Ниже приведены примеры замены связей гладкой поверхности и ребра их реакциями.
На рисунках 1.1–1.8 показаны примеры замены реакциями сил, расположенных в плоскости.
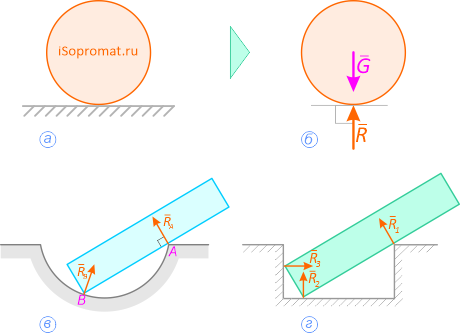
а – тело весом G на гладкой поверхности;
б – действие поверхности заменено реакцией – силой R;
в – в точке А связь «опорная точка» или ребро;
г – реакции направлены перпендикулярно
опираемой или опирающейся плоскостям
Рисунок 1.1
Реакция гладкой поверхности всегда направлена по нормали к этой поверхности (рисунок 1.1).
Реакции связей нити и стержня
Реакция «невесомого» троса (нити, цепи, стержня) всегда направлена вдоль самого троса (нити, цепи, стержня) (рисунок 1.2).
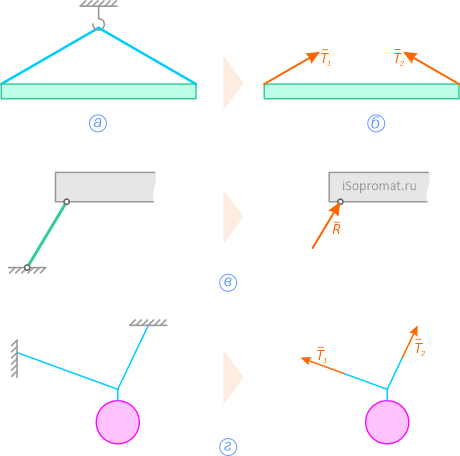
а – балка висит на двух тросах;
б – действие тросов заменено силами Т1 и Т2;
в – связь «идеальный стержень»;
г – связь «идеальная нить»
Рисунок 1.2
Реакции связей шарнирных опор
Шарнирные опоры допускают вращение относительно шарнира, поэтому в них не возникает вращающий момент.
Шарнирно-неподвижная опора может изображаться по-разному (рисунок 1.3,а или 1.3,б). Она может быть заменена либо силой R с углом α (рисунок 1.3,в), либо двумя силами, например, XA и YA (рисунок 1.3,г).

Рисунок 1.3
Всегда можно перейти от R и α к XA и YA (и наоборот):
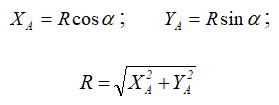
Шарнирно-подвижная опора (рисунок 1.4,а, б, в) допускает (в данном случае) горизонтальное перемещение и не допускает вертикальное.
Реакция R может быть направлена только по нормали к опорной поверхности (рисунок 1.4, г).
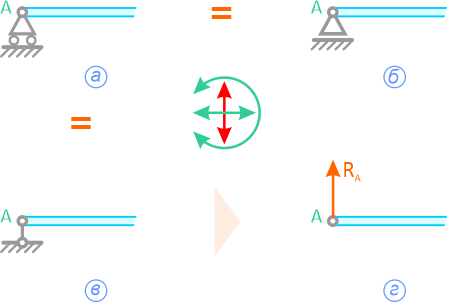
Рисунок 1.4
В следующем примере, связи шарнирно-неподвижной опоры в точке A и шарнирно-подвижной опоры в точке B отброшены (рисунок 1.5, б), а их действие заменено силами XA, YA и RB.
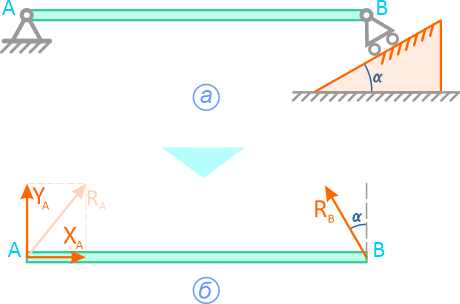
Рисунок 1.5
Подробнее про связи и реакции связей смотрите в нашем видео:
Другие видео
Реакции связи в заделках
Все виды заделок исключают поворот, поэтому в них всегда возникает связь «момент».
Соединение стержня и втулки в плоскости (рисунок 1.6) – скользящая заделка. Отбросив втулку – получаем действие на стержень силы RD и момента MD.
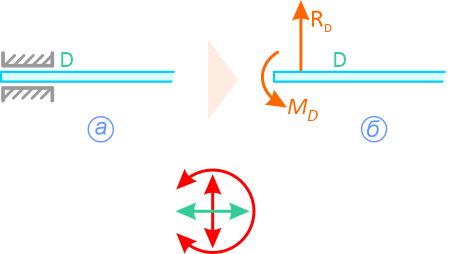
Рисунок 1.6
На рисунке 1.7, а изображена бискользящая заделка. В плоскости данная опора допускает поступательное перемещение стержня как по горизонтали, так и по вертикали, но препятствует повороту (в плоскости). Реакцией такой опоры будет только момент MC (рисунок 1.7, б).
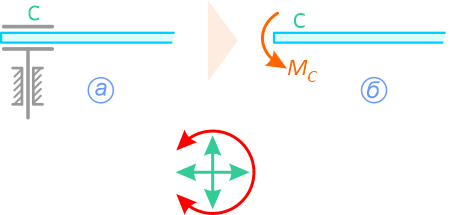
Рисунок 1.7
Консоль (глухая или жесткая заделка) не допускает никакого перемещения детали. Реакцией такой опоры являются неизвестная по величине и направлению сила RA с углом α (или XA и YA) и момент ΜA (рисунок 1.8).
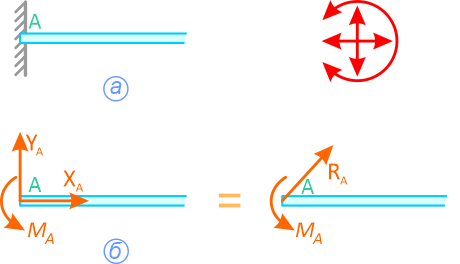
Рисунок 1.8
Реакции пространственных связей
Трехмерная шарнирно-неподвижная опора, или сферический шарнир (рисунок 1.9, а), заменяется системой сил (рисунок 1.9, б) XA, YA и ZA, т.е. силой, неизвестной по величине и направлению.
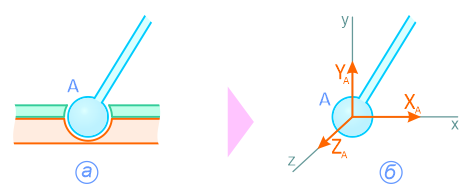
Рисунок 1.9
На рисунке 1.10, а показан вал с колесом, закрепленный в опорах: в точке A – подпятник или стакан, в точке B – втулка или подшипник. Действие опор заменено силами XA, YA, ZA и XB, ZB (рисунок 1.10, б).
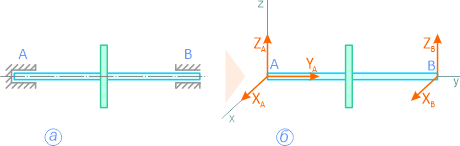
Рисунок 1.10
На следующих рисунках показаны примеры замены различных типов связей их реакциями.
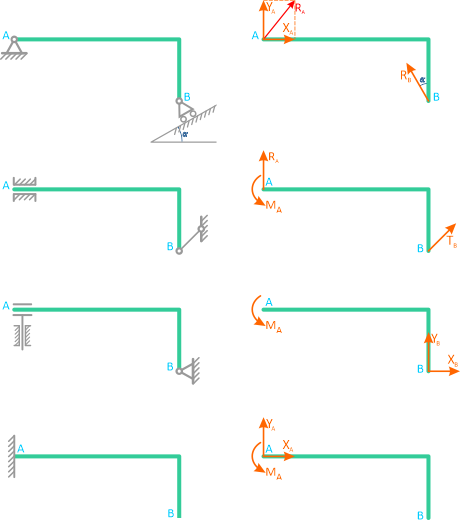
Рисунок 1.11
Трехмерная система удерживаемая в равновесии тремя типами связей: скользящей заделкой, шарнирно неподвижной опорой и тросом.
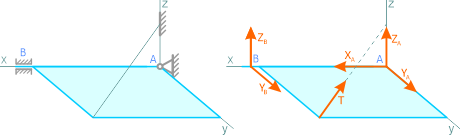
Рисунок 1.12
В общем случае пространственного нагружения, в глухой заделке может возникать до шести реакций связей: три силы и три момента.
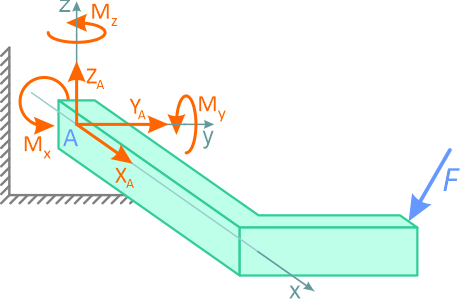
Рисунок 1.13
Величина и истинное направление сил реакций связей определяются из уравнений равновесия рассматриваемой системы.
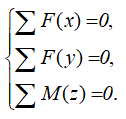
Для плоской системы сил составляется 3 уравнения
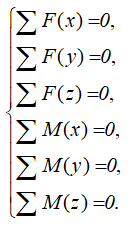
Для пространственной системы — до шести уравнений статики.
Из которых выражаются и рассчитываются искомые реакции.
Пример определения сил реакций связей
Задача
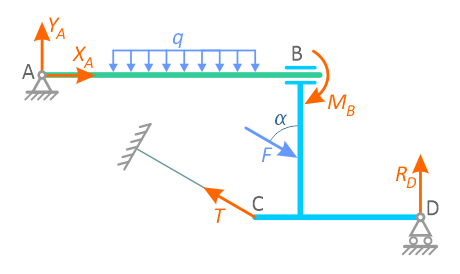
Жесткая рама закреплена в точке A шарнирной связью, а в точке B удерживается в состоянии статического равновесия опорой на катках, с упором в наклонную плоскость под углом 30°.
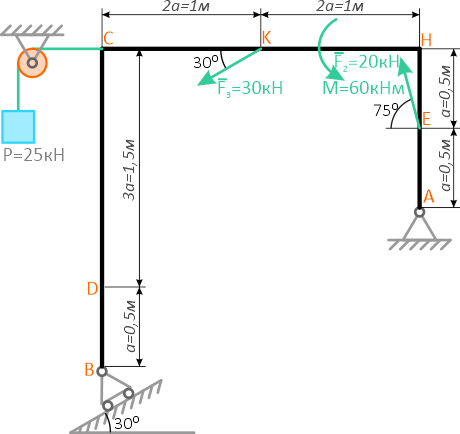
В точке C к раме привязан трос, перекинутый через блок и несущий на конце груз весом P=25кН.
На раму действует пара сил с моментом M=60кНм и две силы F2 и F3 приложенные в точках K и E и расположенные под углами 30° и 75° к горизонтальной оси.
Требуется определить реакции связей в точках A и B, вызываемые заданными действующими нагрузками.
При расчетах, принять размер a=0,5м.
Решение
Рассмотрим равновесие рамной пластины.
Проведем координатные оси x-y и изобразим действующие на пластину внешние нагрузки: силы F, пару сил с моментом M, натяжение троса T (по модулю T=P) и реакции связей XA, YA, RB.
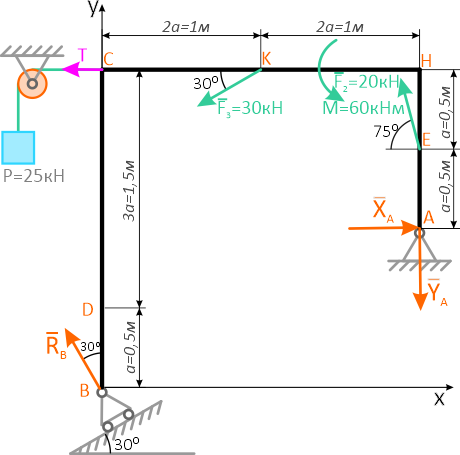
Реакцию неподвижной шарнирной опоры A изображаем двумя составляющими её связями. Реакция на катке направлена перпендикулярно опорной плоскости.
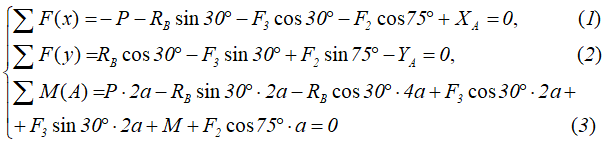
Для полученной плоской системы сил составим три уравнения равновесия системы.
При вычислении моментов сил F относительно точки A воспользуемся теоремой Вариньона, т.е. разложим силы на составляющие Fx=Fcosα и Fy=Fsinα и учтём что mA(F)=mA(Fx)+mA(Fy).
Запишем уравнения сумм проекций сил на оси x и y, а также суммы моментов относительно любой точки системы, например, точки A.
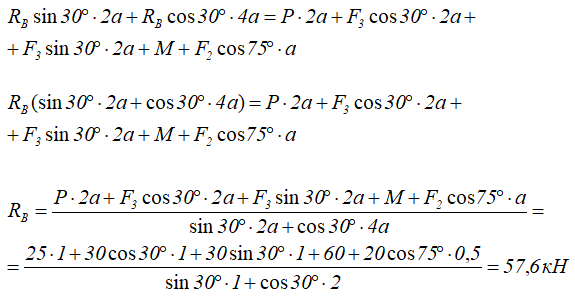
Решая полученную систему уравнений, определяем неизвестные реакции связей катка и шарнирно-неподвижной опоры.
Из уравнения (3) находим реакцию катка
Из уравнения (1) горизонтальную реакцию в точке A

Из уравнения (2) — вертикальную.

Положительные значения найденных реакций говорят о том, что направление связей было выбрано, верно.
Проверку можно выполнить, составив уравнение суммы моментов, в котором будут записаны все искомые реакции, например, относительно точки D:
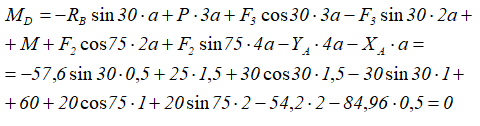
Ноль, полученный в ответе, означает правильность составления и решения уравнений
Ответ: Получены следующие значения сил реакций связей: в катке RB=57,6кН, в шарнирной опоре XA=84,96кН и YA=54,2кН.
Другие примеры решения задач >
Проекция силы на ось >
